
Crop Monitoring Using Sentinel-2 and UAV Multispectral Imagery: A Comparison Case Study in Northeastern Germany


Abstract
:
1. Introduction
2. Materials and Methods
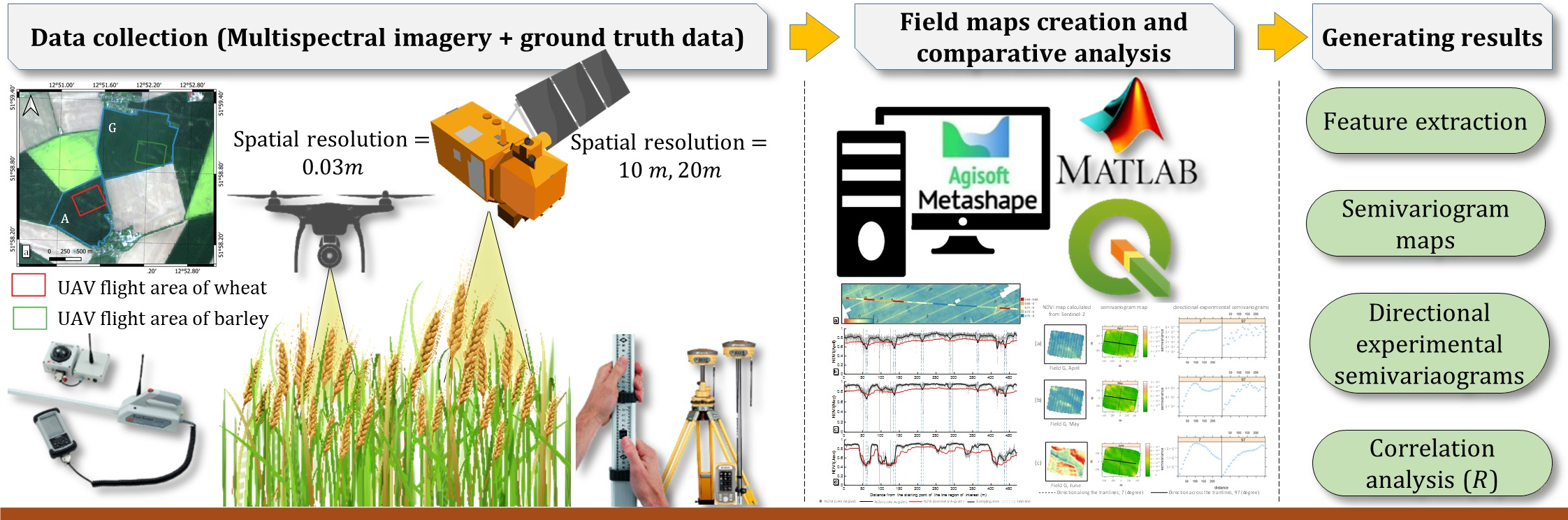
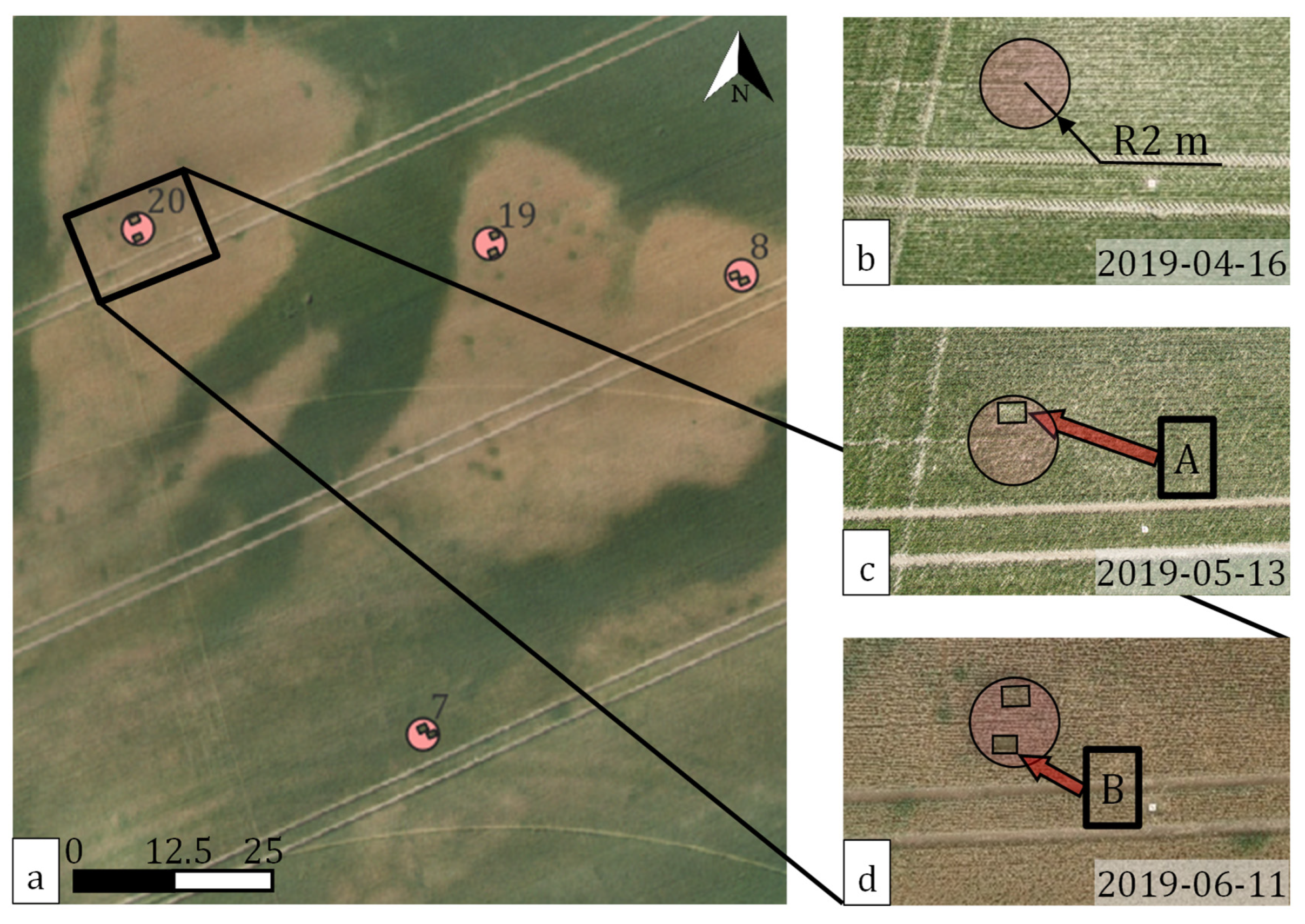
2.1. Study Site and Experimental Field Layout
2.2. Reference Data
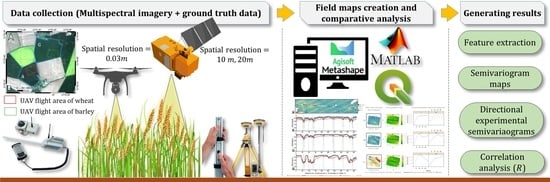
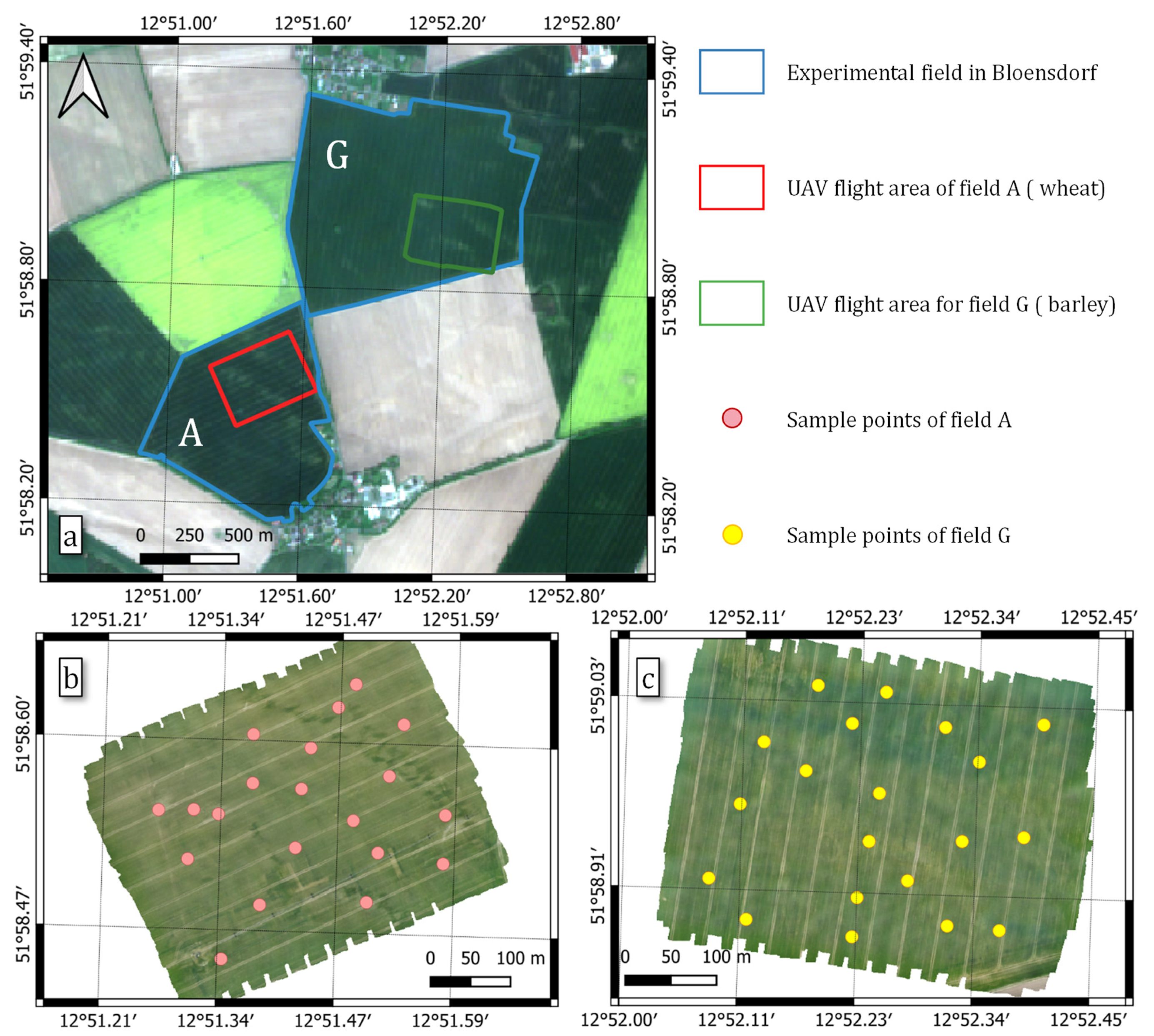
2.3. Remote Sensing Data Acquisition
2.4. Data Statistical Analysis
3. Results
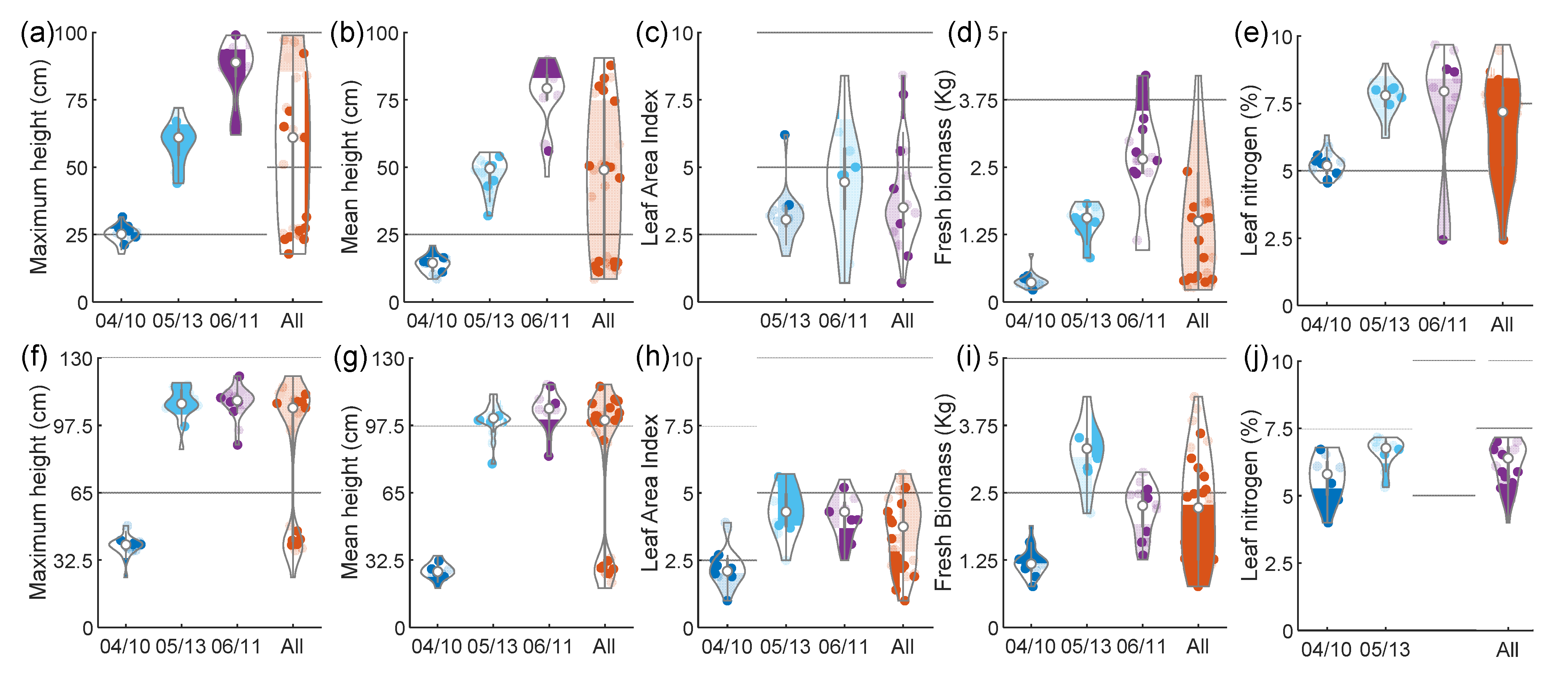
3.1. Distribution of Plant Biophysical and Biochemical Parameters
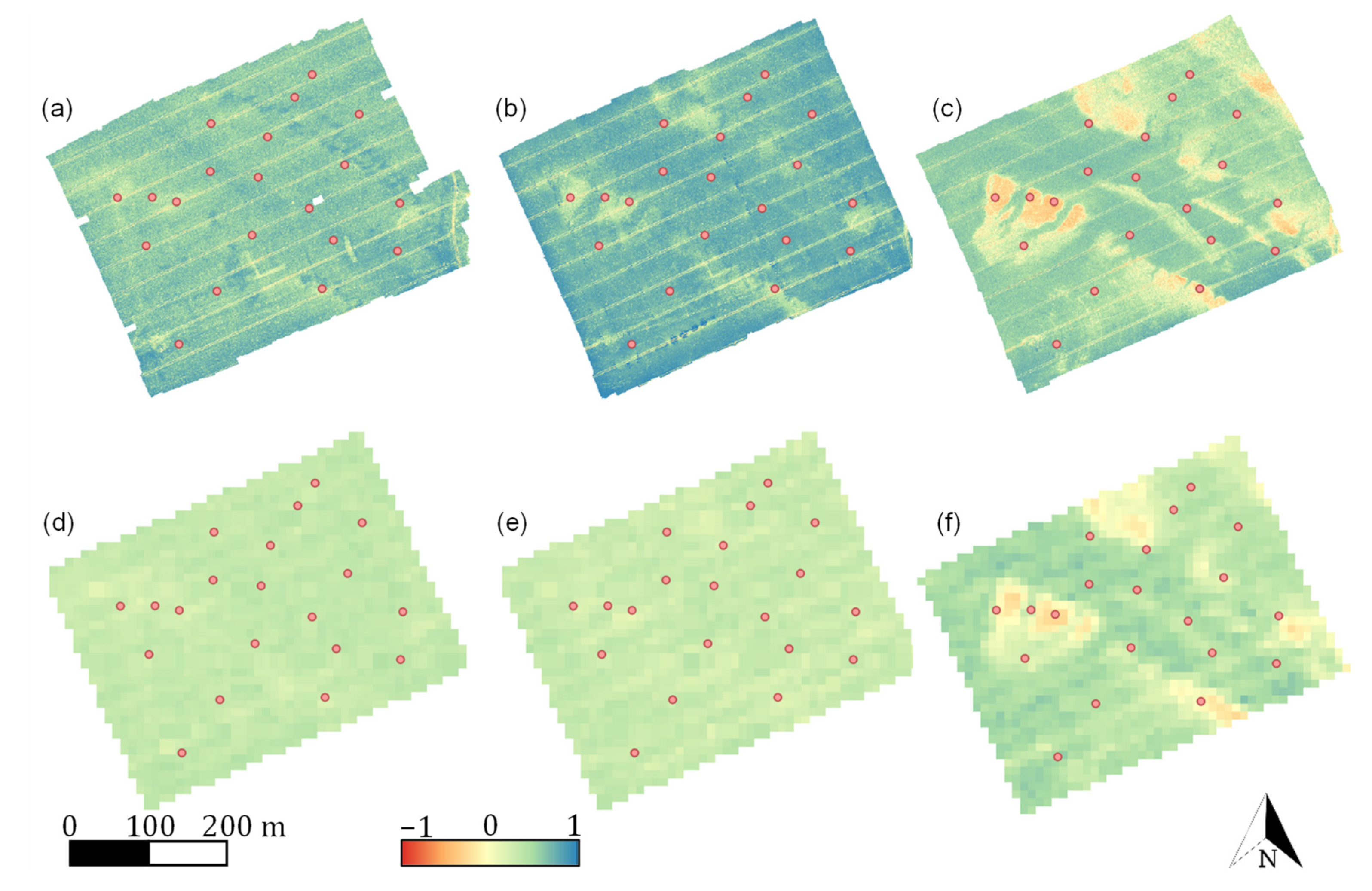
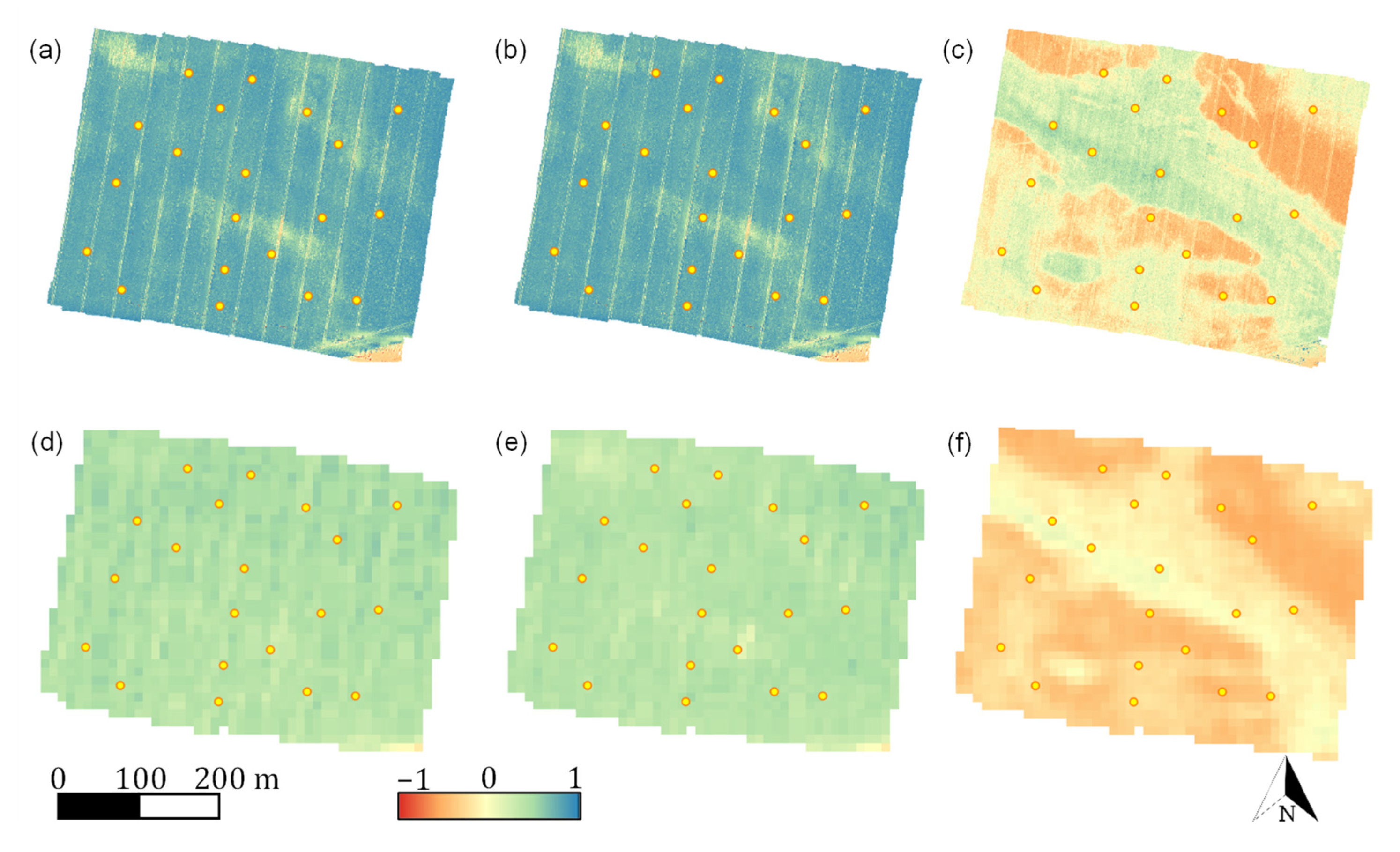
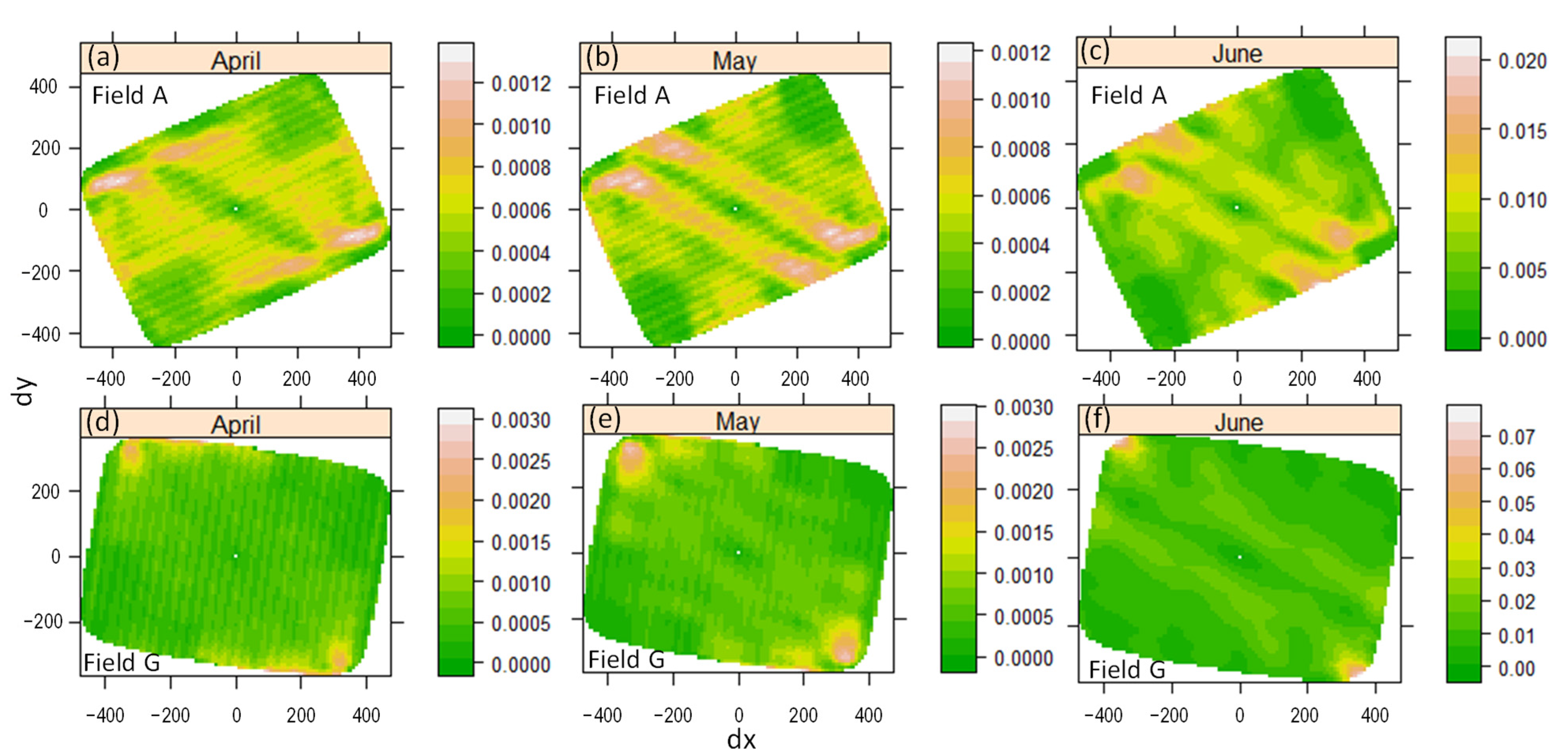
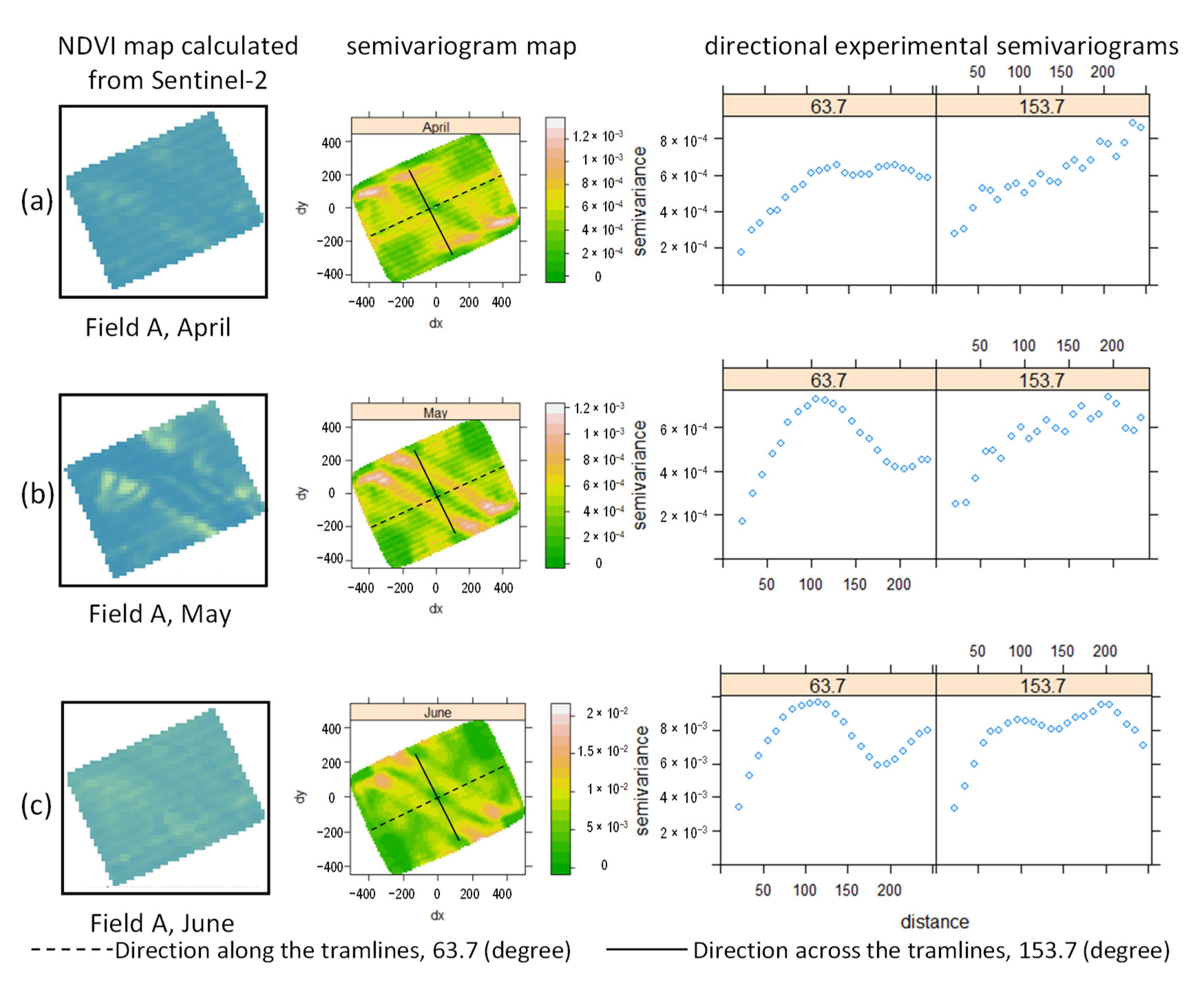
3.2. Spatial Structure and Variability in the UAV and Sentinel-2 Imagery
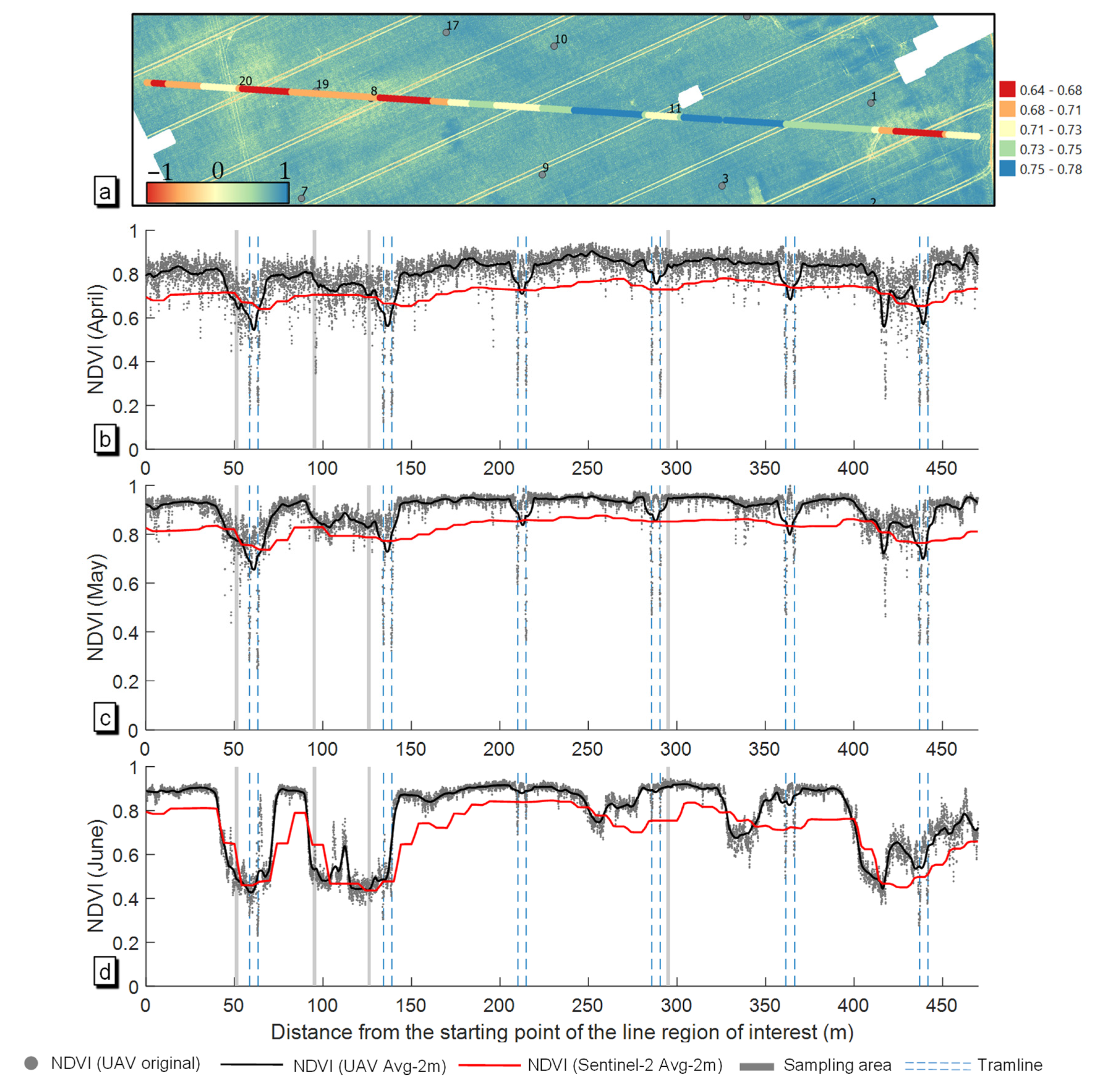
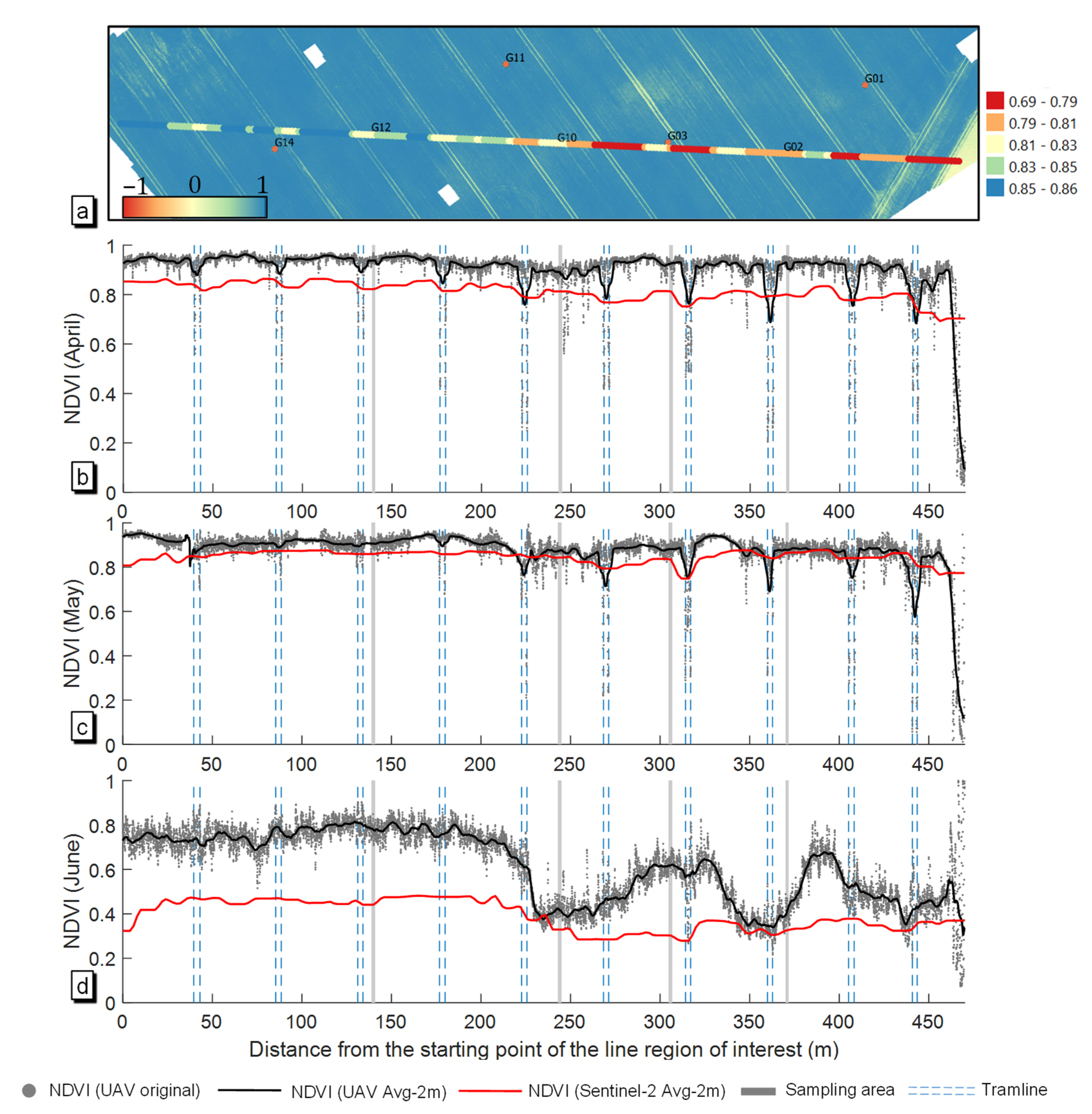
3.3. Comparison of UAV and Sentinel-2 Data along Transect Lines
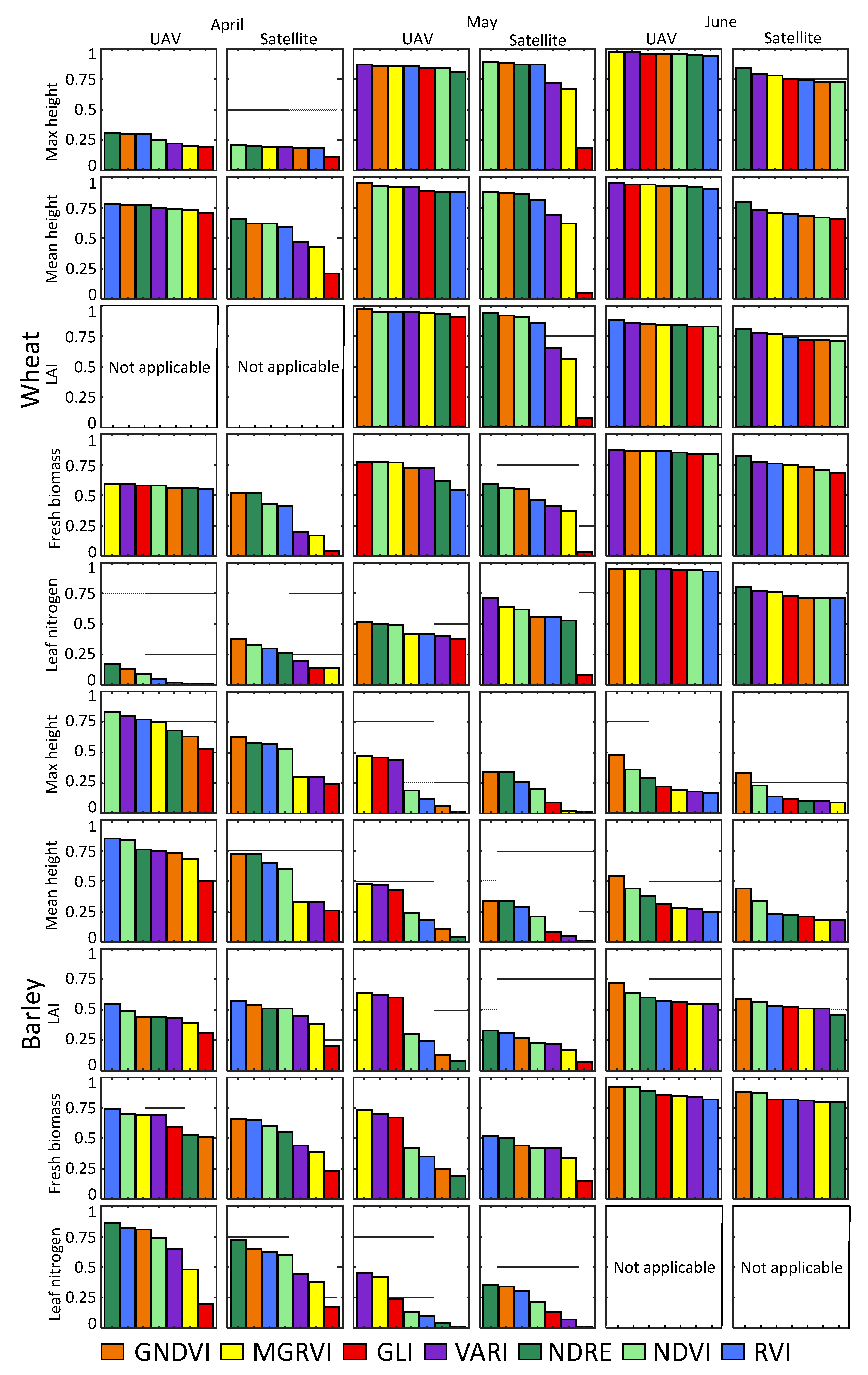
3.4. Correlation of UAV and Sentinel-2 VIs with Agronomic Parameters
4. Discussion
5. Conclusions
- In general, they both follow the same large-scale pattern when the differences in the pattern were well expressed, e.g., the effect of the large river-bed on plant growth over the season was recognizable with UAV and with Sentinel-2 imagery.
- Management-related features can have an influence on the Sentinel-2 imagery in specific cases. The slim tramlines of CTF often used in German agriculture, have a systematic influence on the Sentinel-2 images. This was observed in the spatial pattern as well as in the semivariograms calculated from the Sentinel-2 images in this study. However, Sentinel-2 does not have enough spatial accuracy to accurately delineate the tramline positions.
- UAV data slightly outperforms Sentinel-2 data in their relationship to agronomic parameters, but rarely does the UAV correlation greatly exceed that over Sentinel-2 data. There was, however, a strong variation in the correlation among different VIs when Sentinel-2 was used to calculate them, and our study suggests that VIs solely built from VIS bands should not be considered for relating to agronomic parameters, at least not for the biophysical parameters LAI, biomass, and crop height. In contrast, the correlation of VIs from UAV data was not affected and strongly varied by different VIs.
Supplementary Materials
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Sudduth, K.A.; Hummel, J.W.; Birrell, S.J. Sensors for Site-Specific Management. In The State of Site Specific Management for Agriculture; American Society of Agronomy: Madison, WI, USA, 1997; pp. 183–210. [Google Scholar]
- Gebbers, R.; Adamchuk, V.I. Precision Agriculture and Food Security. Science 2010, 327, 828–831. [Google Scholar] [CrossRef]
- Jones, J.W.; Antle, J.M.; Basso, B.; Boote, K.J.; Conant, R.T.; Foster, I.; Godfray, H.C.J.; Herrero, M.; Howitt, R.E.; Janssen, S.; et al. Brief History of Agricultural Systems Modeling. Agric. Syst. 2017, 155, 240–254. [Google Scholar] [CrossRef]
- Diacono, M.; Rubino, P.; Montemurro, F. Precision Nitrogen Management of Wheat. A Review. Agron. Sustain. Dev. 2013, 33, 219–241. [Google Scholar] [CrossRef]
- FAO. Sampling Methods for Agricultural Surveys; FAO: Rome, Italy, 1989. [Google Scholar]
- Bosecker, R.R. Sampling Methods in Agriculture; National Agricultural Statistics Service, US Department of Agriculture: Washington, DC, USA, 1988. [Google Scholar]
- Ziliani, M.G.; Parkes, S.D.; Hoteit, I.; McCabe, M.F. Intra-Season Crop Height Variability at Commercial Farm Scales Using a Fixed-Wing UAV. Remote Sens. 2018, 10, 2007. [Google Scholar] [CrossRef]
- Comba, L.; Biglia, A.; Ricauda Aimonino, D.; Tortia, C.; Mania, E.; Guidoni, S.; Gay, P. Leaf Area Index Evaluation in Vineyards Using 3D Point Clouds from UAV Imagery. Precis. Agric. 2020, 21, 881–896. [Google Scholar] [CrossRef]
- Ten Harkel, J.; Bartholomeus, H.; Kooistra, L. Biomass and Crop Height Estimation of Different Crops Using UAV-Based LiDAR. Remote Sens. 2020, 12, 17. [Google Scholar] [CrossRef]
- Campos-Taberner, M.; García-Haro, F.J.; Busetto, L.; Ranghetti, L.; Martínez, B.; Gilabert, M.A.; Camps-Valls, G.; Camacho, F.; Boschetti, M. A Critical Comparison of Remote Sensing Leaf Area Index Estimates over Rice-Cultivated Areas: From Sentinel-2 and Landsat-7/8 to MODIS, GEOV1 and EUMETSAT Polar System. Remote Sens. 2018, 10, 763. [Google Scholar] [CrossRef]
- Berger, K.; Verrelst, J.; Féret, J.-B.; Wang, Z.; Wocher, M.; Strathmann, M.; Danner, M.; Mauser, W.; Hank, T. Crop Nitrogen Monitoring: Recent Progress and Principal Developments in the Context of Imaging Spectroscopy Missions. Remote Sens. Environ. 2020, 242, 111758. [Google Scholar] [CrossRef]
- Poley, L.G.; McDermid, G.J. A Systematic Review of the Factors Influencing the Estimation of Vegetation Aboveground Biomass Using Unmanned Aerial Systems. Remote Sens. 2020, 12, 1052. [Google Scholar] [CrossRef]
- Zecha, C.W.; Link, J.; Claupein, W. Mobile Sensor Platforms: Categorisation and Research Applications in Precision Farming. J. Sens. Sens. Syst. 2013, 2, 51–72. [Google Scholar] [CrossRef] [Green Version]
- Bogue, R. Sensors Key to Advances in Precision Agriculture. Sens. Rev. 2017, 37, 1–6. [Google Scholar] [CrossRef]
- Zhang, L.; Zhang, H.; Niu, Y.; Han, W. Mapping Maize Water Stress Based on UAV Multispectral Remote Sensing. Remote Sens. 2019, 11, 605. [Google Scholar] [CrossRef]
- Shendryk, Y.; Sofonia, J.; Garrard, R.; Rist, Y.; Skocaj, D.; Thorburn, P. Fine-Scale Prediction of Biomass and Leaf Nitrogen Content in Sugarcane Using UAV LiDAR and Multispectral Imaging. Int. J. Appl. Earth Obs. Geoinf. 2020, 92, 102177. [Google Scholar] [CrossRef]
- Neupane, K.; Baysal-Gurel, F. Automatic Identification and Monitoring of Plant Diseases Using Unmanned Aerial Vehicles: A Review. Remote Sens. 2021, 13, 3841. [Google Scholar] [CrossRef]
- Hassan, M.A.; Yang, M.; Rasheed, A.; Yang, G.; Reynolds, M.; Xia, X.; Xiao, Y.; He, Z. A Rapid Monitoring of NDVI across the Wheat Growth Cycle for Grain Yield Prediction Using a Multi-Spectral UAV Platform. Plant Sci. 2019, 282, 95–103. [Google Scholar] [CrossRef]
- Walsh, O.S.; Shafian, S.; Marshall, J.M.; Jackson, C.; McClintick-Chess, J.R.; Blanscet, S.M.; Swoboda, K.; Thompson, C.; Belmont, K.M.; Walsh, W.L. Assessment of UAV Based Vegetation Indices for Nitrogen Concentration Estimation in Spring Wheat. Adv. Remote Sens. 2018, 7, 71–90. [Google Scholar] [CrossRef]
- Rose, J.C.; Kicherer, A.; Wieland, M.; Klingbeil, L.; Töpfer, R.; Kuhlmann, H. Towards Automated Large-Scale 3D Phenotyping of Vineyards under Field Conditions. Sensors 2016, 16, 2136. [Google Scholar] [CrossRef]
- Piragnolo, M.; Lusiani, G.; Pirotti, F. Comparison of Vegetation Indices from RPAS and Sentinel-2 Imagery for Detecting Permanent Pastures. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2018, 42, 1381–1387. [Google Scholar] [CrossRef]
- Gascon, F.; Cadau, E.; Colin, O.; Hoersch, B.; Isola, C.; Fernández, B.L.; Martimort, P. Copernicus Sentinel-2 Mission: Products, Algorithms and Cal/Val. In Proceedings of the Earth Observing Systems XIX, San Diego, CA, USA, 17–21 August 2014; SPIE: Bellingham, WA, USA, 2014; Volume 9218, pp. 455–463. [Google Scholar]
- Drusch, M.; Del Bello, U.; Carlier, S.; Colin, O.; Fernandez, V.; Gascon, F.; Hoersch, B.; Isola, C.; Laberinti, P.; Martimort, P. Sentinel-2: ESA’s Optical High-Resolution Mission for GMES Operational Services. Remote Sens. Environ. 2012, 120, 25–36. [Google Scholar] [CrossRef]
- Delloye, C.; Weiss, M.; Defourny, P. Retrieval of the Canopy Chlorophyll Content from Sentinel-2 Spectral Bands to Estimate Nitrogen Uptake in Intensive Winter Wheat Cropping Systems. Remote Sens. Environ. 2018, 216, 245–261. [Google Scholar] [CrossRef]
- Revill, A.; Florence, A.; MacArthur, A.; Hoad, S.P.; Rees, R.M.; Williams, M. The Value of Sentinel-2 Spectral Bands for the Assessment of Winter Wheat Growth and Development. Remote Sens. 2019, 11, 2050. [Google Scholar] [CrossRef]
- Chamen, T. Controlled Traffic Farming—From Worldwide Research to Adoption in Europe and Its Future Prospects. Acta Technol. Agric. 2015, 18, 64–73. [Google Scholar] [CrossRef]
- Su, J.; Liu, C.; Coombes, M.; Hu, X.; Wang, C.; Xu, X.; Li, Q.; Guo, L.; Chen, W.-H. Wheat Yellow Rust Monitoring by Learning from Multispectral UAV Aerial Imagery. Comput. Electron. Agric. 2018, 155, 157–166. [Google Scholar] [CrossRef]
- Cohrs, C.W.; Cook, R.L.; Gray, J.M.; Albaugh, T.J. Sentinel-2 Leaf Area Index Estimation for Pine Plantations in the Southeastern United States. Remote Sens. 2020, 12, 1406. [Google Scholar] [CrossRef]
- Di Gennaro, S.F.; Dainelli, R.; Palliotti, A.; Toscano, P.; Matese, A. Sentinel-2 Validation for Spatial Variability Assessment in Overhead Trellis System Viticulture Versus UAV and Agronomic Data. Remote Sens. 2019, 11, 2573. [Google Scholar] [CrossRef]
- Sozzi, M.; Kayad, A.; Marinello, F.; Taylor, J.; Tisseyre, B. Comparing Vineyard Imagery Acquired from Sentinel-2 and Unmanned Aerial Vehicle (UAV) Platform. Oeno One 2020, 54, 189–197. [Google Scholar] [CrossRef]
- Messina, G.; Peña, J.M.; Vizzari, M.; Modica, G. A Comparison of UAV and Satellites Multispectral Imagery in Monitoring Onion Crop. An Application in the ‘Cipolla Rossa Di Tropea’ (Italy). Remote Sens. 2020, 12, 3424. [Google Scholar] [CrossRef]
- Nicolay, A. Untersuchungen zur (Prä-)Historischen Relief-, Boden- und Landschaftsentwicklung im Südlichen Brandenburg (Niederlausitz). Ph.D. Thesis, BTU Cottbus, Senftenberg, Germany, 2017. [Google Scholar]
- Meier, U. Growth Stages of Mono- and Dicotyledonous Plants: BBCH Monograph; Blackwell Wissenschafts-Verlag: Berlin, Germany; Boston, MA, USA, 1997; ISBN 3826331524/9783826331527. [Google Scholar]
- Li, M.; Shamshiri, R.R.; Schirrmann, M.; Weltzien, C.; Shafian, S.; Laursen, M.S. UAV Oblique Imagery with an Adaptive Micro-Terrain Model for Estimation of Leaf Area Index and Height of Maize Canopy from 3D Point Clouds. Remote Sens. 2022, 14, 585. [Google Scholar] [CrossRef]
- QGIS Development Team. QGIS Geographic Information System; QGIS Association: Gossau, Switzerland, 2015. [Google Scholar]
- Congedo, L. Semi-Automatic Classification Plugin, version 6.0.1.1; ResearchGate: Berlin, Germany, 2016. [Google Scholar] [CrossRef]
- Louhaichi, M.; Borman, M.M.; Johnson, D.E. Spatially Located Platform and Aerial Photography for Documentation of Grazing Impacts on Wheat. Geocarto Int. 2001, 16, 65–70. [Google Scholar] [CrossRef]
- Gitelson, A.A.; Merzlyak, M.N. Remote Estimation of Chlorophyll Content in Higher Plant Leaves. Int. J. Remote Sens. 1997, 18, 2691–2697. [Google Scholar] [CrossRef]
- Bendig, J.; Yu, K.; Aasen, H.; Bolten, A.; Bennertz, S.; Broscheit, J.; Gnyp, M.L.; Bareth, G. Combining UAV-Based Plant Height from Crop Surface Models, Visible, and near Infrared Vegetation Indices for Biomass Monitoring in Barley. Int. J. Appl. Earth Obs. Geoinf. 2015, 39, 79–87. [Google Scholar] [CrossRef]
- Rouse, J.W., Jr.; Haas, R.H.; Schell, J.A.; Deering, D.W. Monitoring Vegetation Systems in the Great Plains with Erts. In NASA Special Publication; NASA: Washington, DC, USA, 1974; Volume 351, p. 309. [Google Scholar]
- Huete, A.; Didan, K.; Miura, T.; Rodriguez, E.P.; Gao, X.; Ferreira, L.G. Overview of the Radiometric and Biophysical Performance of the MODIS Vegetation Indices. Remote Sens. Environ. 2002, 83, 195–213. [Google Scholar] [CrossRef]
- Gitelson, A.A. Wide Dynamic Range Vegetation Index for Remote Quantification of Biophysical Characteristics of Vegetation. J. Plant Physiol. 2004, 161, 165–173. [Google Scholar] [CrossRef]
- Benesty, J.; Chen, J.; Huang, Y.; Cohen, I. Pearson Correlation Coefficient. In Noise Reduction in Speech Processing; Springer: Berlin/Heidelberg, Germany, 2009; pp. 1–4. [Google Scholar]
- Harfenmeister, K.; Spengler, D. Analyzing Temporal and Spatial Characteristics of Crop Parameters Using Sentinel-1 Backscatter Data. Remote Sens. 2019, 11, 1569. [Google Scholar] [CrossRef]
- Nonni, F.; Malacarne, D.; Pappalardo, S.E.; Codato, D.; Meggio, F.; De Marchi, M. Sentinel-2 Data Analysis and Comparison with UAV Multispectral Images for Precision Viticulture. GI Forum 2018, 1, 105–116. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Platform | Parameters | Technical Specifications |
|---|---|---|
| UAV + RedEdge-M | Flight plant parameters | 80% forward/side overlap, flight speed of 6 ms−1, flight altitude 50 m |
| Camera setup | Global shutter, auto-capture mode, 1 image/s, nadir view | |
| Bands and central wavelength (nm) | Blue (475), Green (560), Red (668), Red Edge (717), NIR (840) | |
| Ground resolution | 3 cm | |
| Sentinel-2 | Bands and central wavelength (nm) | B1(443), B2 (490), B3 (560), B4 (665) and B8 (842), B5 (705), B6 (740), B7 (783), B8a (865), B9(945), B10(1375), B11 (1610) and B12 (2190) |
| Spatial resolution | B2-B4, B8: 10 m; B5-B7, B8a, B11-B12: 20 m; B1, B9-B10: 60 m |
| Flight Date | Flight Task | Growth Stage | BBCH Scale | No. of Collected Images | Wind Speed Range (ms−1) 1 | Satellite Imagery Acquisition Date | Ground Measurements |
|---|---|---|---|---|---|---|---|
| 2019-04-16 | A1 | Tillering | 23 | 1707 | [3.4, 4.5] | 2019-04-09 | 2019-04-10 |
| G1 | Stem elongation | 31 | 1693 | [3.9, 5.1] | |||
| 2019-05-13 | A2 | Stem elongation | 32–33 | 2014 | [3.8, 4.3] | 2019-05-12 | 2019-05-14 |
| G2 | Flowering | 61–65 | 2280 | [3.6, 5.6] | |||
| 2019-06-11 | A3 | Development of fruit | 73–77 | 1739 | [2.9, 5.2] | 2019-06-13 | 2019-06-13 |
| G3 | Ripening | 85–89 | 1745 | [1.5, 3.5] | 2019-06-14 |
| Features | Formulations | References |
|---|---|---|
| Green leaf index (GLI) | (2G − R − B)/(2G + R + B) | Louhaichi et al. (2001) [37] |
| Green normalized difference vegetation index (GNDVI) | (NIR − G)/(NIR + G) | Gitelson, Merzlyak (1997) [38] |
| Modified green red vegetation index (MGRVI) | (G2 − R2)/(G2 + R2) | Bendig, et al. (2015) [39] |
| Normalized difference red edge index (NDRE) | (NIR − RedEdge)/(NIR + RedEdge) | Gitelson, Merzlyak (1997) [38] |
| Normalized difference vegetation index (NDVI) | (NIR − R)/(NIR + R) | Rouse et al. (1974) [40] |
| Ratio vegetation index (RVI) | NIR/Red | Huete et al. (2002) [41] |
| Visible atmospherically-resistant index (VARI) | (G − R)/(G + R − B) | Gitelson (2004) [42] |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, M.; Shamshiri, R.R.; Weltzien, C.; Schirrmann, M. Crop Monitoring Using Sentinel-2 and UAV Multispectral Imagery: A Comparison Case Study in Northeastern Germany. Remote Sens. 2022, 14, 4426. https://doi.org/10.3390/rs14174426
Li M, Shamshiri RR, Weltzien C, Schirrmann M. Crop Monitoring Using Sentinel-2 and UAV Multispectral Imagery: A Comparison Case Study in Northeastern Germany. Remote Sensing. 2022; 14(17):4426. https://doi.org/10.3390/rs14174426
Chicago/Turabian StyleLi, Minhui, Redmond R. Shamshiri, Cornelia Weltzien, and Michael Schirrmann. 2022. "Crop Monitoring Using Sentinel-2 and UAV Multispectral Imagery: A Comparison Case Study in Northeastern Germany" Remote Sensing 14, no. 17: 4426. https://doi.org/10.3390/rs14174426
APA StyleLi, M., Shamshiri, R. R., Weltzien, C., & Schirrmann, M. (2022). Crop Monitoring Using Sentinel-2 and UAV Multispectral Imagery: A Comparison Case Study in Northeastern Germany. Remote Sensing, 14(17), 4426. https://doi.org/10.3390/rs14174426