
WaterMaskAnalyzer (WMA)—A User-Friendly Tool to Analyze and Visualize Temporal Dynamics of Inland Water Body Extents



Abstract
:1. Introduction
2. Requirements, Materials and Methods
2.1. Web Tool Requirements
2.2. Water Mask Extraction
2.2.1. Data Used
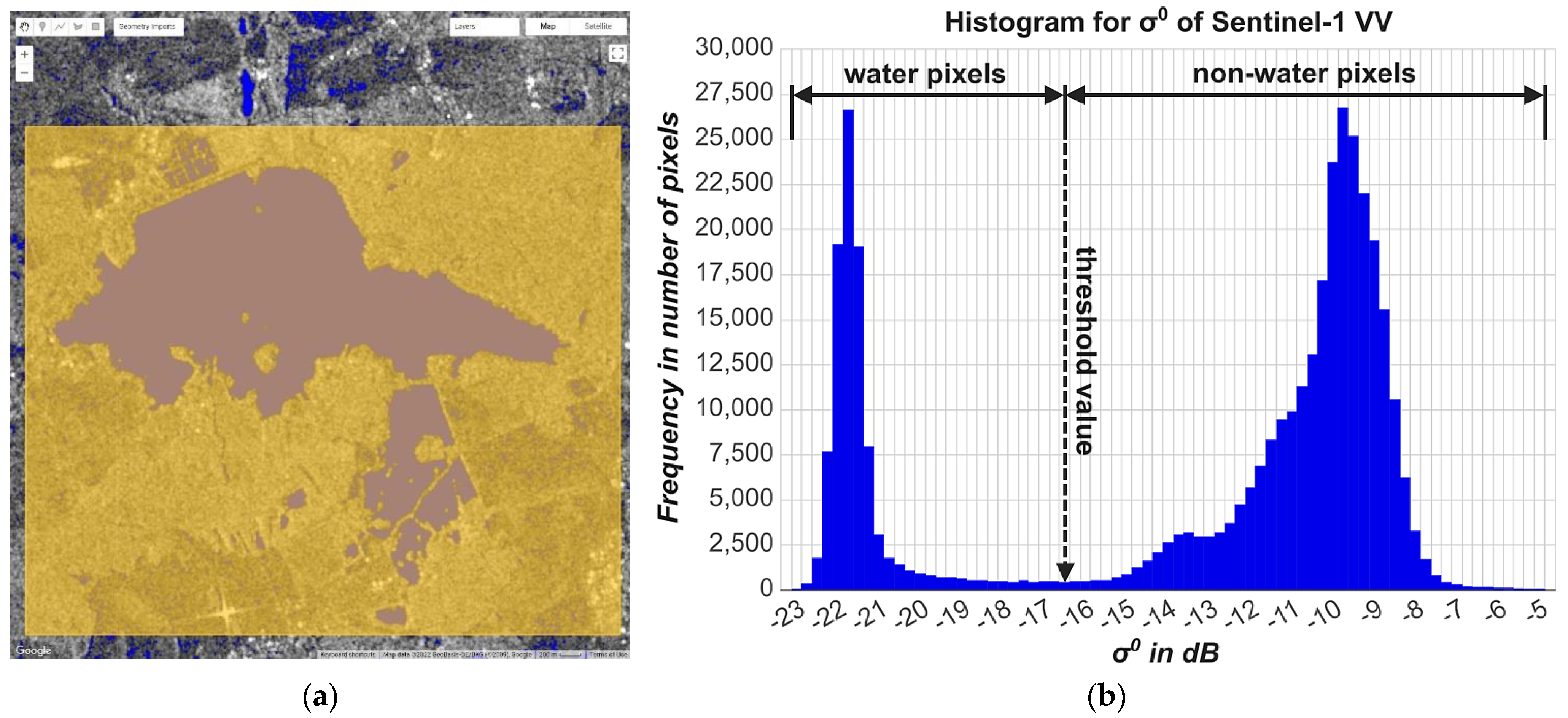
2.2.2. Classification Method
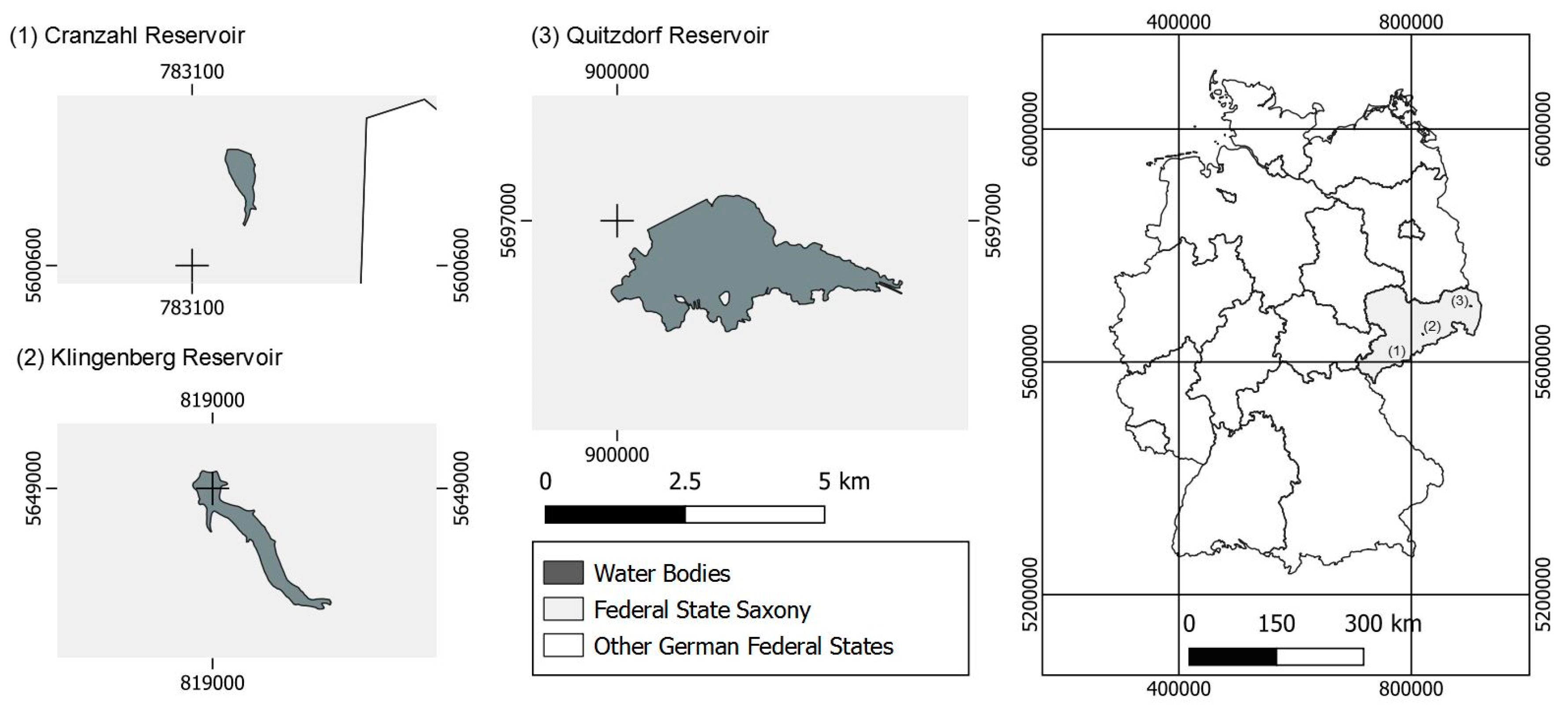
2.3. Investigation Area
3. Results
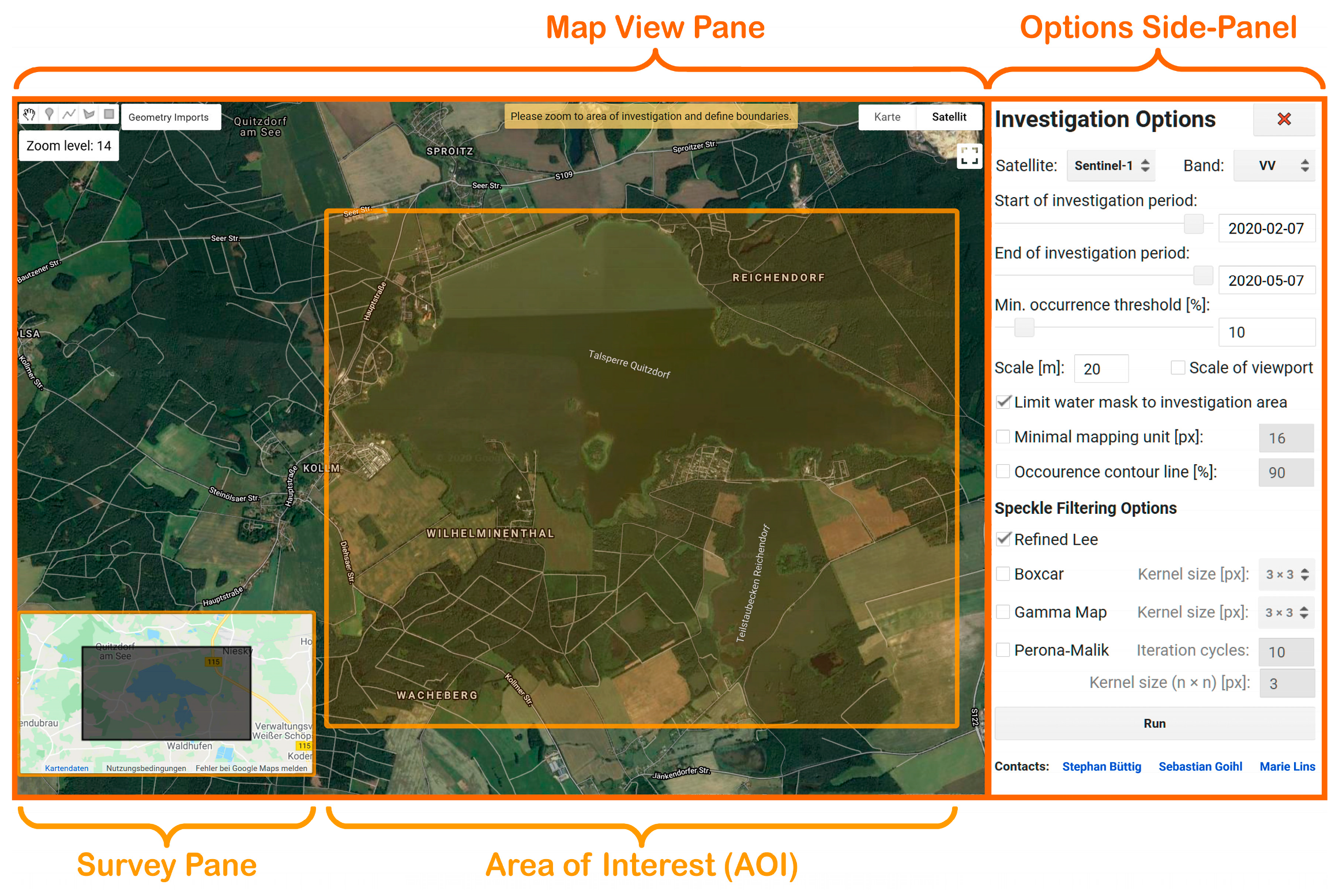
3.1. Web Tool Development
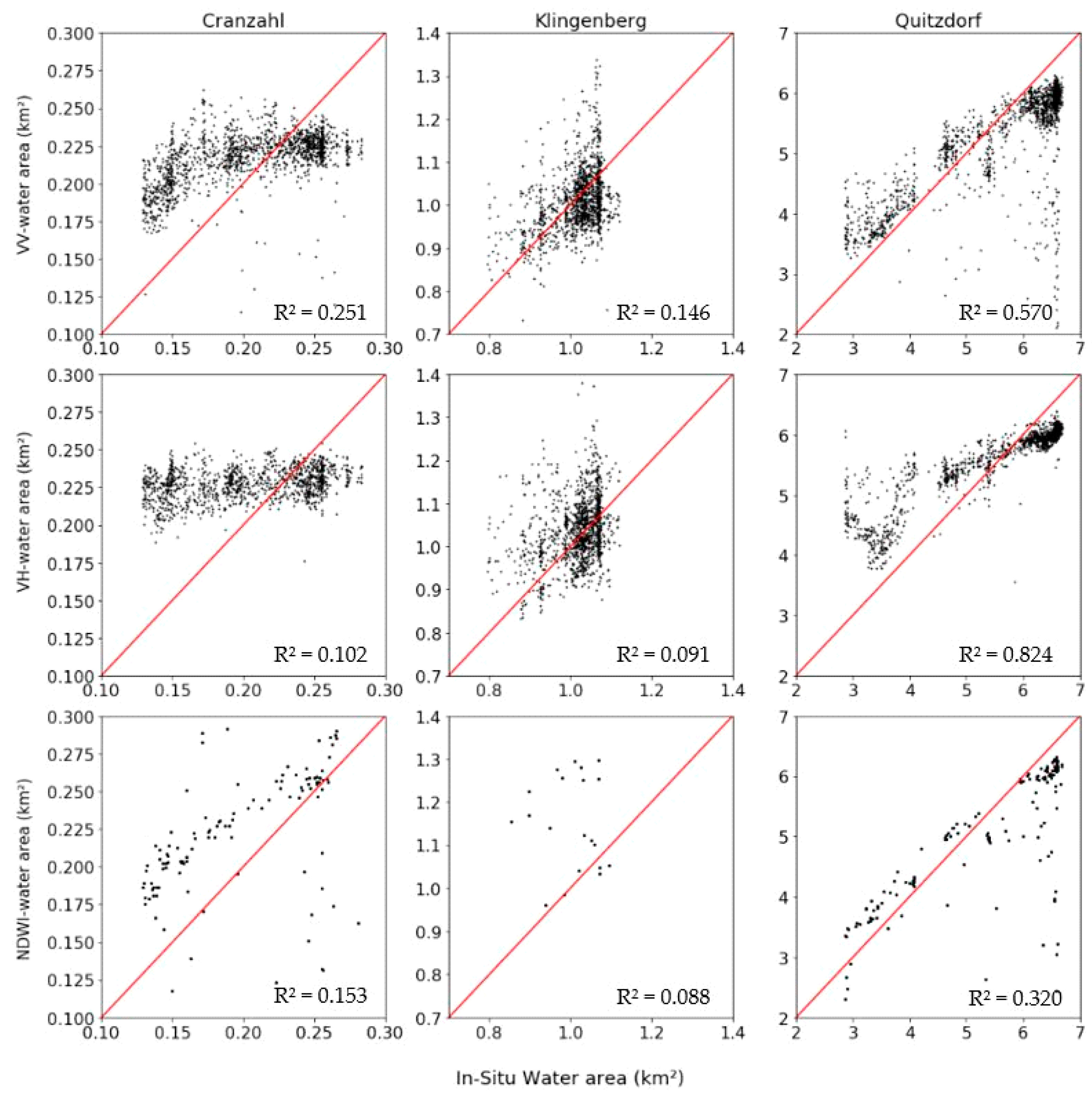
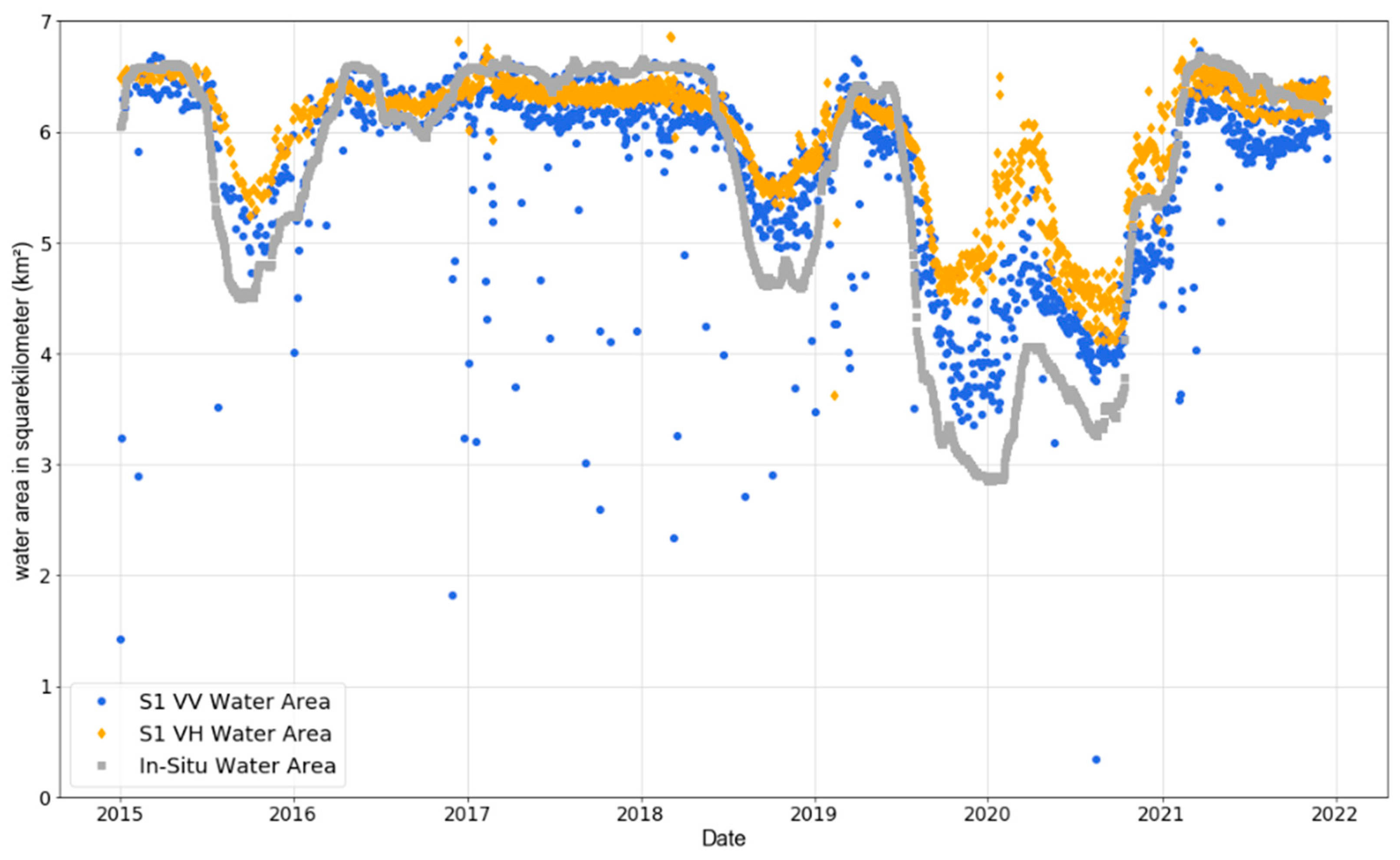
3.2. Validation of the Water Mask Calculation
4. Discussion
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Xing, L.; Tang, S.; Wang, H.; Fan, W.; Wang, G. Monitoring monthly surface water dynamics of Dongting Lake using Sentinel-1 data at 10 m. PeerJ 2018, 6, e4992. [Google Scholar] [CrossRef] [PubMed]
- Busker, T.; de Roo, A.; Gelati, E.; Schwatke, C.; Adamovic, M.; Bisselink, B.; Pekel, J.-F.; Cottam, A. A global lake and reservoir volume analysis using a surface water dataset and satellite altimetry. Hydrol. Earth Syst. Sci. 2019, 23, 669–690. [Google Scholar] [CrossRef]
- Quang, D.N.; Linh, N.K.; Tam, H.S.; Viet, N.T. Remote sensing applications for reservoir water level monitoring, sustainable water surface management, and environmental risks in Quang Nam province, Vietnam. J. Water Clim. Chang. 2021, 12, 3045–3063. [Google Scholar] [CrossRef]
- Lefebvre, G.; Davranche, A.; Willm, L.; Campagna, J.; Redmond, L.; Merle, C.; Guelmami, A.; Poulin, B. Introducing WIW for Detecting the Presence of Water in Wetlands with Landsat and Sentinel Satellites. Remote Sens. 2019, 11, 2210. [Google Scholar] [CrossRef]
- Förderrichtlinie Teichwirtschaft und Naturschutz (Funding Guideline Pond Management and Nature Conservation). Available online: https://www.revosax.sachsen.de/vorschrift/16010-Foerderrichtlinie-Teichwirtschaft-und-Naturschutz (accessed on 3 May 2022).
- Pekel, J.-F.; Cottam, A.; Gorelick, N.; Belward, A.S. High-resolution mapping of global surface water and its long-term changes. Nature 2016, 540, 418–422. [Google Scholar] [CrossRef]
- Global Surface Water Explorer. Available online: https://global-surface-water.appsport.com (accessed on 10 January 2022).
- Muro, J.; Canty, M.; Conradsen, K.; Hüttich, C.; Nielsen, A.A.; Skriver, H.; Remy, F.; Strauch, A.; Thonfeld, F.; Menz, G. Short-Term Change Detection in Wetlands Using Sentinel-1 Time Series. Remote Sens. 2016, 8, 795. [Google Scholar] [CrossRef]
- Li, Y.; Niu, Z.; Xu, Z.; Yan, X. Construction of High Spatial-Temporal Water Body Dataset in China Based on Sentinel-1 Archives and GEE. Remote Sens. 2020, 12, 2413. [Google Scholar] [CrossRef]
- Jiang, Z.; Jiang, W.; Ling, Z.; Wang, X.; Peng, K.; Wang, C. Surface Water Extraction and Dynamic Analysis of Baiyangdian Lake Based on the Google Earth Engine Platform Using Sentinel-1 for Reporting SDG 6.6.1 Indicators. Water 2021, 13, 138. [Google Scholar] [CrossRef]
- Markert, K.N.; Markert, A.M.; Mayer, T.; Nauman, C.; Haag, A.; Poortinga, A.; Bhandari, B.; Thwal, N.S.; Kunlamai, T.; Chishtie, F.; et al. Comparing Sentinel-1 Surface Water Mapping Algorithms and Radiometric Terrain Correction Processing in Southeast Asia Utilizing Google Earth Engine. Remote Sens. 2020, 12, 2469. [Google Scholar] [CrossRef]
- Gorelick, N.; Hancher, M.; Dixon, M.; Ilyushchenko, S.; Thau, D.; Moore, R. Google Earth Engine: Planetary-scale geospatial analysis for everyone. Remote Sens. Environ. 2017, 202, 18–27. [Google Scholar] [CrossRef]
- Soman, M.K.; Indu, J. Sentinel-1 basied inland water dynamics Mapping System (SIMS). Env. Model. Software 2022, 149, 105305. [Google Scholar] [CrossRef]
- Landestalsperrenverwaltung Sachsen (State Dams Administration Saxony). Talsperrenmeldezentrale. Available online: https://www.ltv.sachsen.de/tmz/uebersicht.html (accessed on 2 May 2022).
- Mira, N.C.; Catalao, J.; Nico, G. Multi-temporal crop classification with machine learning techniques. Remote Sens. Agric. Ecosyst. Hydrol. XXI 2019, 111490P. [Google Scholar] [CrossRef]
- Phan, T.N.; Kuch, V.; Lehnert, L.W. Land Cover Classification using Google Earth Engine and Random Forest Classifier—The Role of Image Composition. Remote Sens. 2020, 12, 2411. [Google Scholar] [CrossRef]
- Otsu, N. A threshold selection method from gray-level-histograms. IEEE Trabs. Syst. Man. Cybern. 1979, 9, 62–66. [Google Scholar] [CrossRef]
- Li, J.; Wang, S. An automatic method for mapping inland surface waterbodies with Radarsat-2 imagery. Int. J. Remote Sens. 2015, 36, 1367–1384. [Google Scholar] [CrossRef]
- Lee, J.; Jurkevich, L.; Dewaele, P.; Wambacq, P.; Oosterlinck, A. Speckle filtering of synthetic aperture radar images: A Review. Remote Sens. Rev. 1994, 8, 313–340. [Google Scholar] [CrossRef]
- Macelloni, G.; Paloscia, S.; Pampaloni, P.; Sigismondi, S.; De Matthaeis, P.; Ferrazzoli, P.; Schiavon, G.; Solimini, D. The SIR-C/X-SAR experiment on Montespertoli: Sensitivity to hydrological parameters. Int. J. Remote Sens. 1999, 20, 2597–2612. [Google Scholar] [CrossRef]
- Shi, J.; Chen, K.S.; Li, Q.; Jackson, T.J.; O’Neill, P.E.; Tsang, L. A parameterized surface reflectivity model and estimation of bare-surface soil moisture with L-band radiometer. IEEE Trans. Geosci. Remote Sens. 2002, 40, 2674–2686. [Google Scholar]
- Manjusree, R.; Kumar, L.P.; Bhatt, C.M.; Rao, G.S.; Bhanumurthy, V. Optimization of threshold ranges for rapid flood inundation mapping by evaluating backscatter profiles of high incidence angle SAR images. Int. J. Disaster Risk Sci. 2012, 3, 113–122. [Google Scholar] [CrossRef]
- Twele, A.; Cao, W.X.; Plank, S.; Martinis, S. Sentinel-1-based flood mapping: A fully automated processing chain. Int. J. Remote Sens. 2016, 37, 2990–3004. [Google Scholar] [CrossRef]
- Clement, M.; Kilsby, C.; Moore, P. Multi-temporal synthetic aperture radar flood mapping using change detection. J. Flood Risk Manag. 2017, 11, S152–S168. [Google Scholar] [CrossRef] [Green Version]
- Bonafilia, D.; Tellman, B.; Anderson, T.; Issenberg, E. Sen1Floods11: A georeferenced dataset to train and test deep learning flood algorithms for Sentinel-1. In Proceedings of the 2020 IEEE/CVF Conference on Computer Vision and Pattern Recognition Workshops (CVPRW), Seattle, WA, USA, 14–19 June 2020; pp. 835–845. [Google Scholar] [CrossRef]
- Joshi, N.; Baumann, M.; Ehammer, A.; Fensholt, R.; Grogan, K.; Hostert, P.; Jepsen, M.R.; Kuemmerle, T.; Meyfroidt, P.; Mitchard, E.T.A.; et al. A Review of the Application of Optical and Radar Remote Sensing Data Fusion to Land Use Mapping and Monitoring. Remote Sens. 2016, 8, 70. [Google Scholar] [CrossRef] [Green Version]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sensor/Index | Parameter | Cranzahl | Klingenberg | Quitzdorf |
|---|---|---|---|---|
| Sentinel-1 VV | R2 | 0.251 | 0.146 | 0.570 |
| RMSE (km2) | 0.040 | 0.077 | 0.863 | |
| Sentinel-1 VH | R2 | 0.102 | 0.091 | 0.824 |
| RMSE (km2) | 0.048 | 0.085 | 0.708 | |
| Sentinel-2 NDWI | R2 | 0.153 | 0.088 | 0.320 |
| RSME (km2) | 0.065 | 0.323 | 1.276 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Buettig, S.; Lins, M.; Goihl, S. WaterMaskAnalyzer (WMA)—A User-Friendly Tool to Analyze and Visualize Temporal Dynamics of Inland Water Body Extents. Remote Sens. 2022, 14, 4485. https://doi.org/10.3390/rs14184485
Buettig S, Lins M, Goihl S. WaterMaskAnalyzer (WMA)—A User-Friendly Tool to Analyze and Visualize Temporal Dynamics of Inland Water Body Extents. Remote Sensing. 2022; 14(18):4485. https://doi.org/10.3390/rs14184485
Chicago/Turabian StyleBuettig, Stephan, Marie Lins, and Sebastian Goihl. 2022. "WaterMaskAnalyzer (WMA)—A User-Friendly Tool to Analyze and Visualize Temporal Dynamics of Inland Water Body Extents" Remote Sensing 14, no. 18: 4485. https://doi.org/10.3390/rs14184485
APA StyleBuettig, S., Lins, M., & Goihl, S. (2022). WaterMaskAnalyzer (WMA)—A User-Friendly Tool to Analyze and Visualize Temporal Dynamics of Inland Water Body Extents. Remote Sensing, 14(18), 4485. https://doi.org/10.3390/rs14184485