
BO-DRNet: An Improved Deep Learning Model for Oil Spill Detection by Polarimetric Features from SAR Images


 , and
, and 
Abstract
:1. Introduction
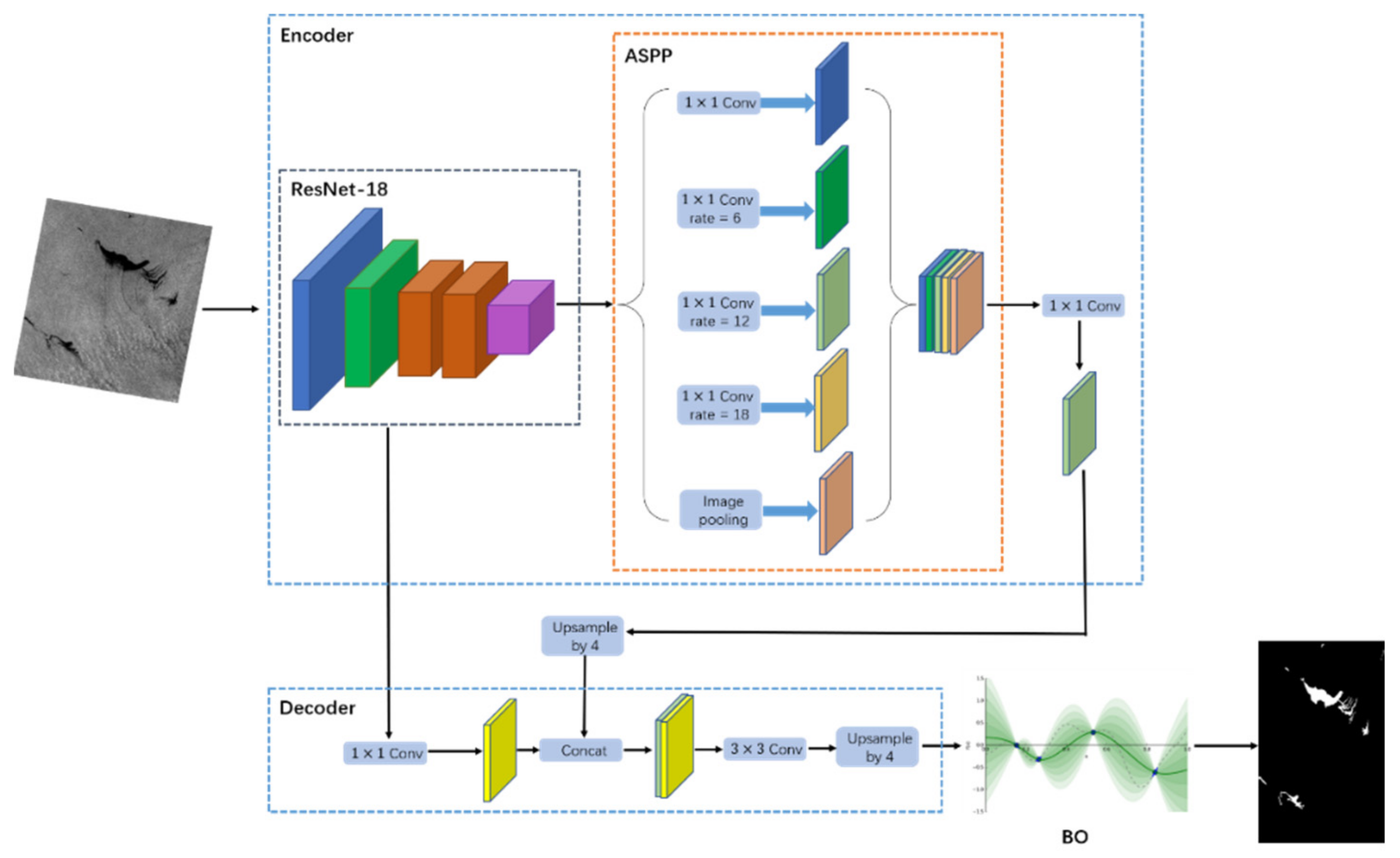
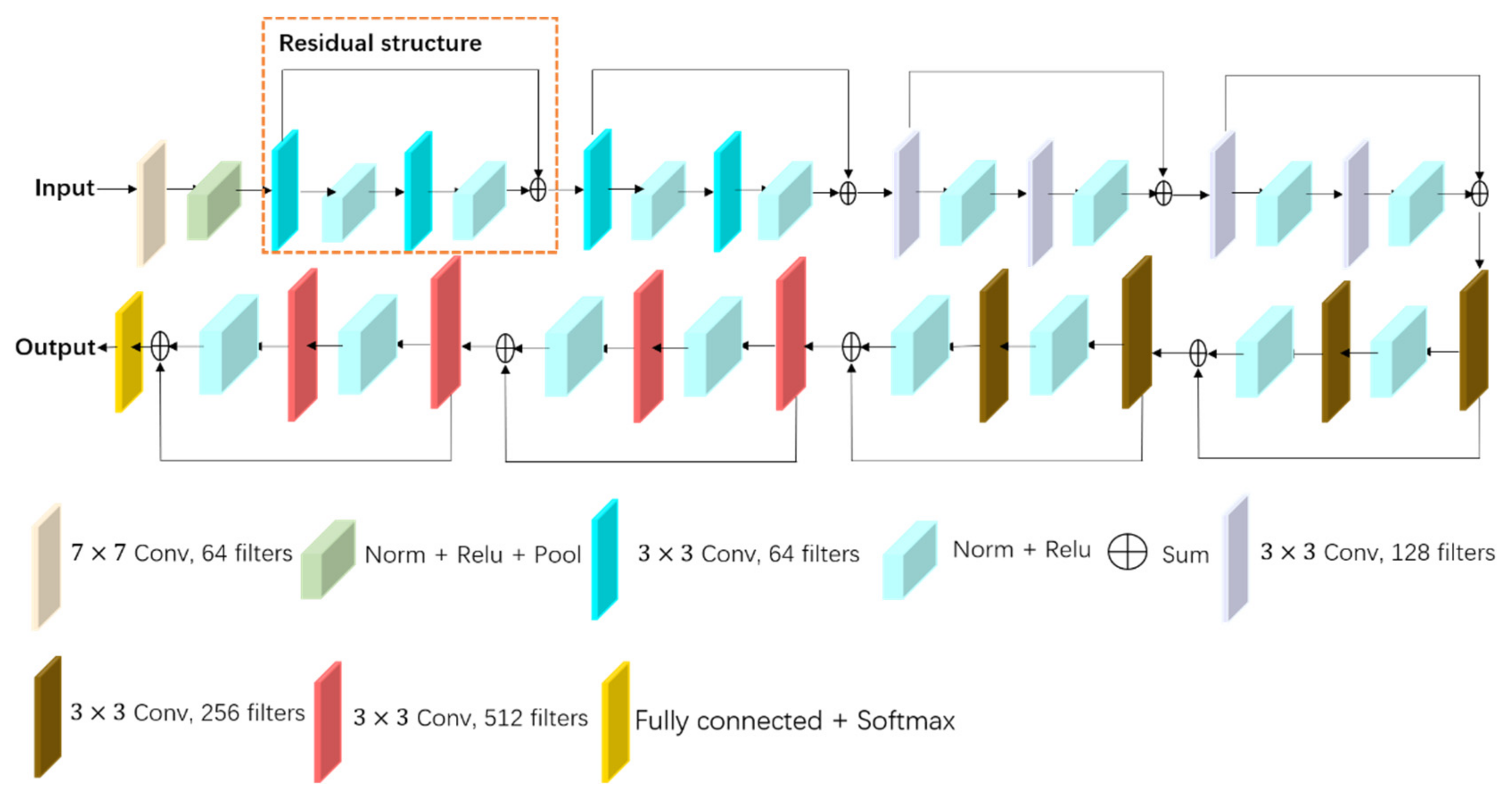
- ResNet-18, as the backbone in encoder of DeepLabv3+, can get more sufficiently feature extraction. ASPP (Atrous Spatial Pyramid Pooling) as an essential in encoder of DeepLabv3+, can expand the reception field to avoid loss of target information and get a fuller feature.
- Based on more sufficient and fuller feature extraction, BO was used to optimize hyperparameters and obtain optimal combinations of hyperparameters.
2. The Proposed BO-DRNet Model
2.1. Encoder
2.2. Decoder
2.3. Bayesian Optimization (BO)
| Algorithm 1: Bayesian Optimization (BO). |
| Input: f, X, S, M |
| D← InitSamplex (f, X) |
| for i←|D| to T do |
| p (y|x, D) ← FitModel (M, D) |
| xi ← argmaxx∈X S (x, p (y|x, D)) |
| yi ← f(xi) |
| D←D ∪ (xi, yi) |
| end for |
3. Dataset, Experiments, and Results
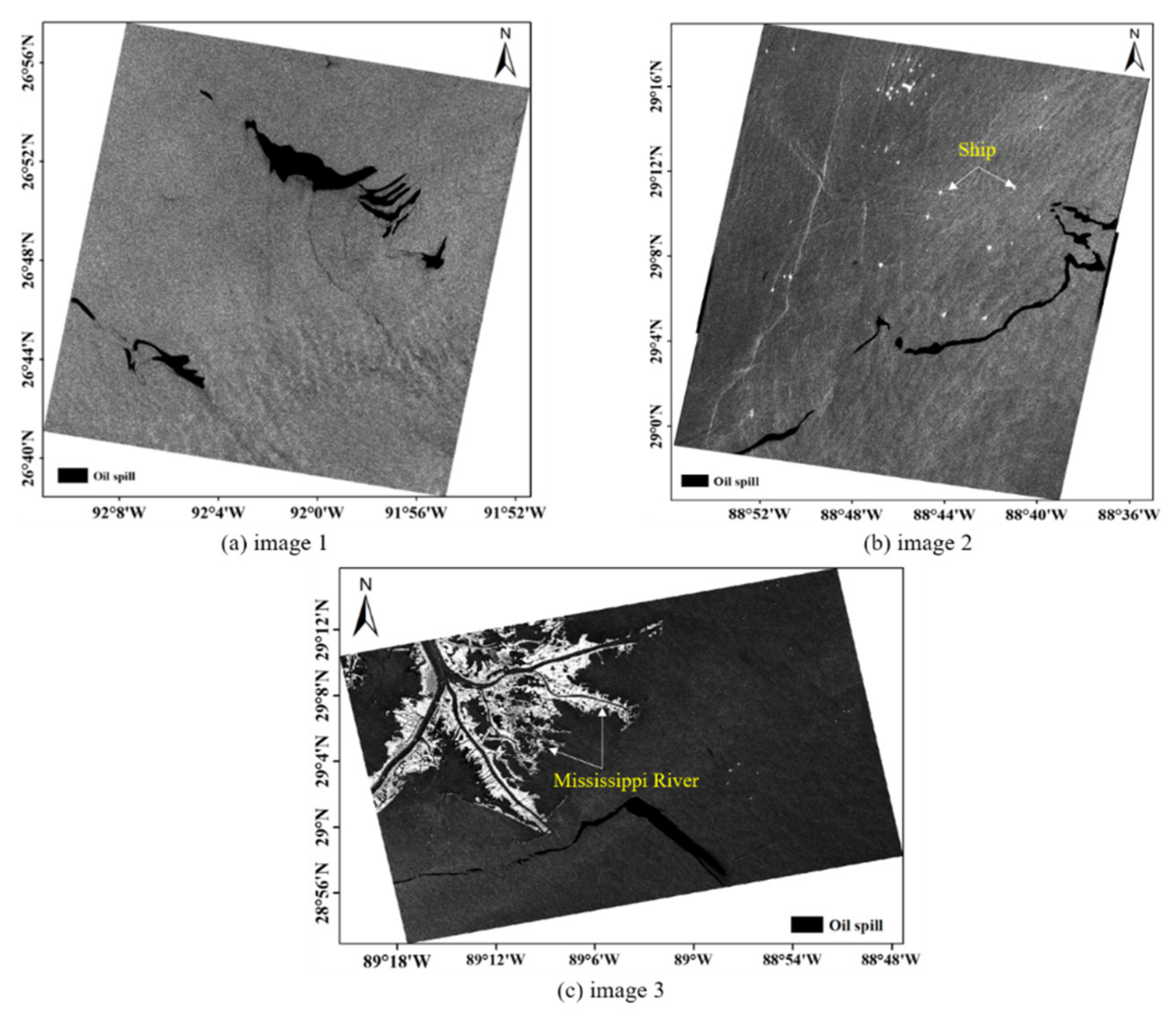
3.1. Oil Spill Dataset
3.2. Dataset Processing
3.3. Experiment
3.4. Results
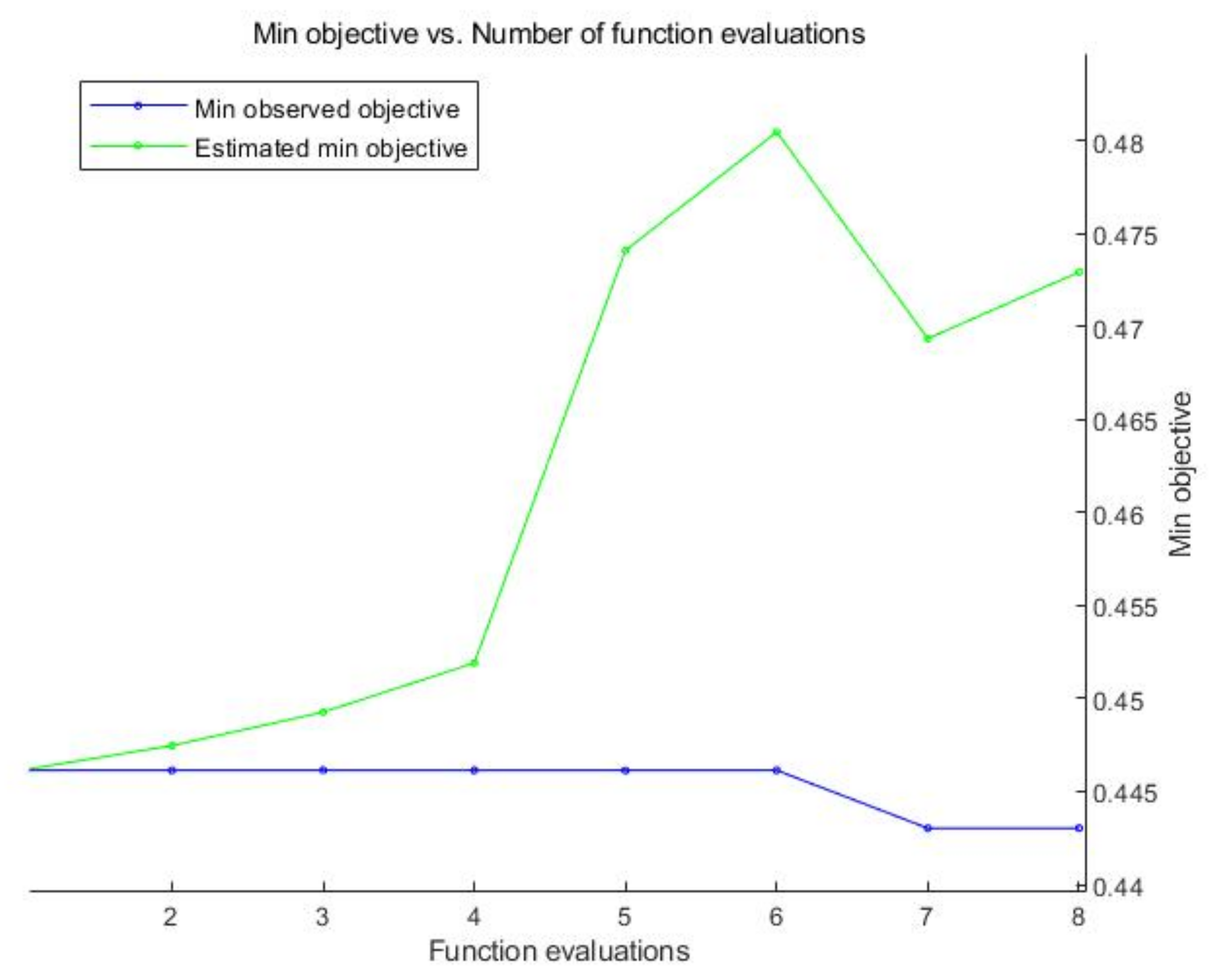
3.4.1. Results of BO
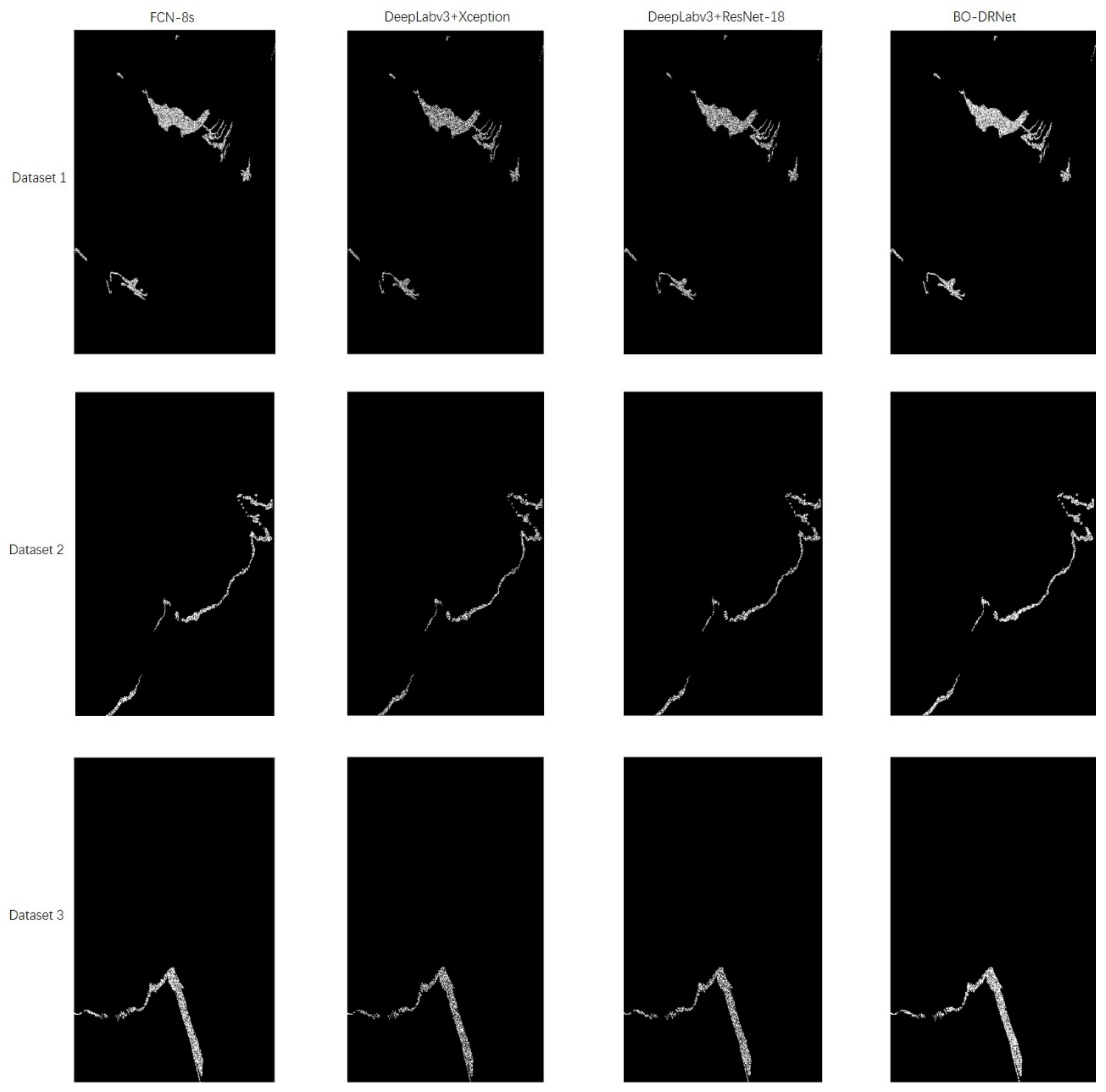
3.4.2. Results of Deep Learning Models
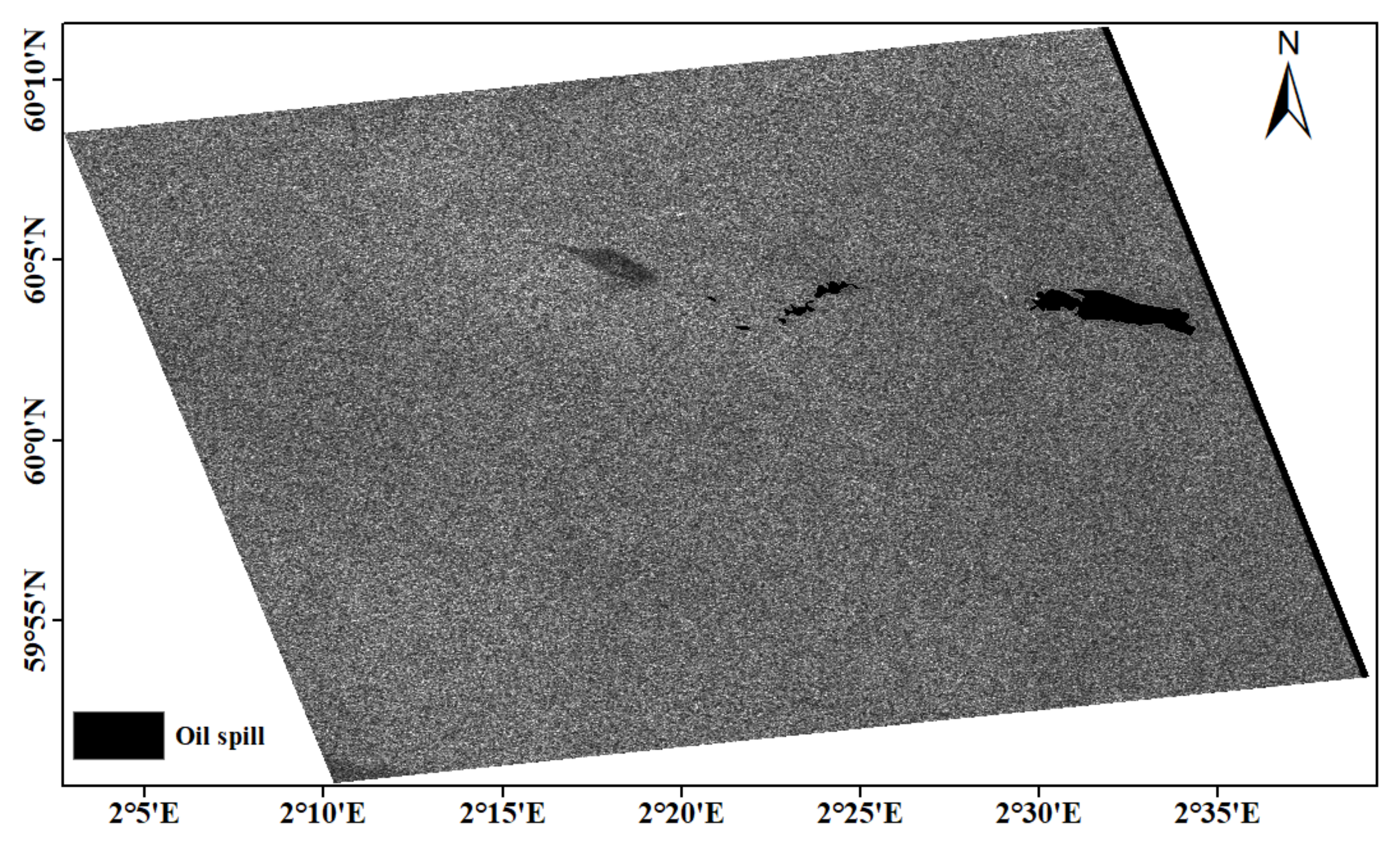
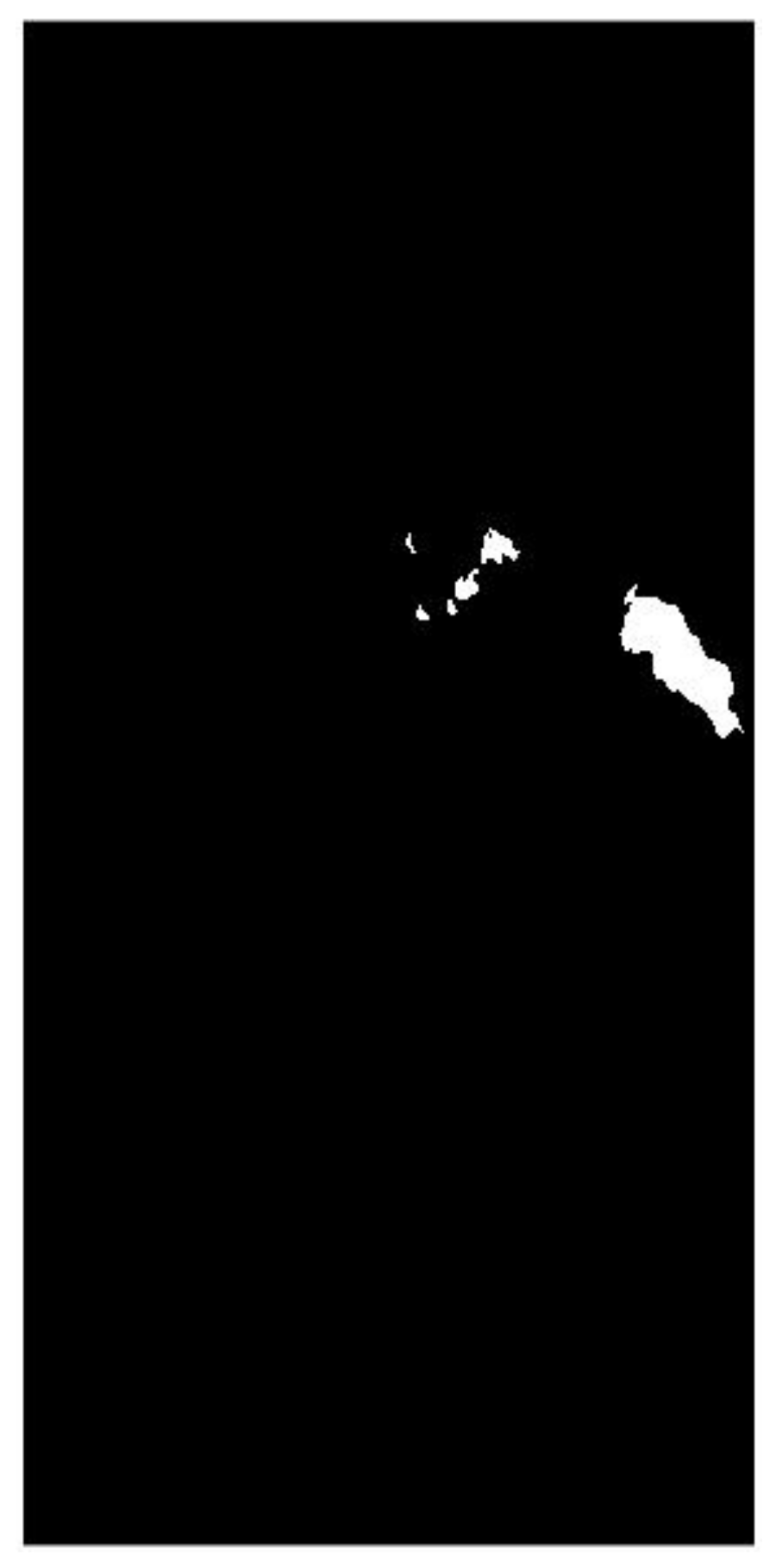
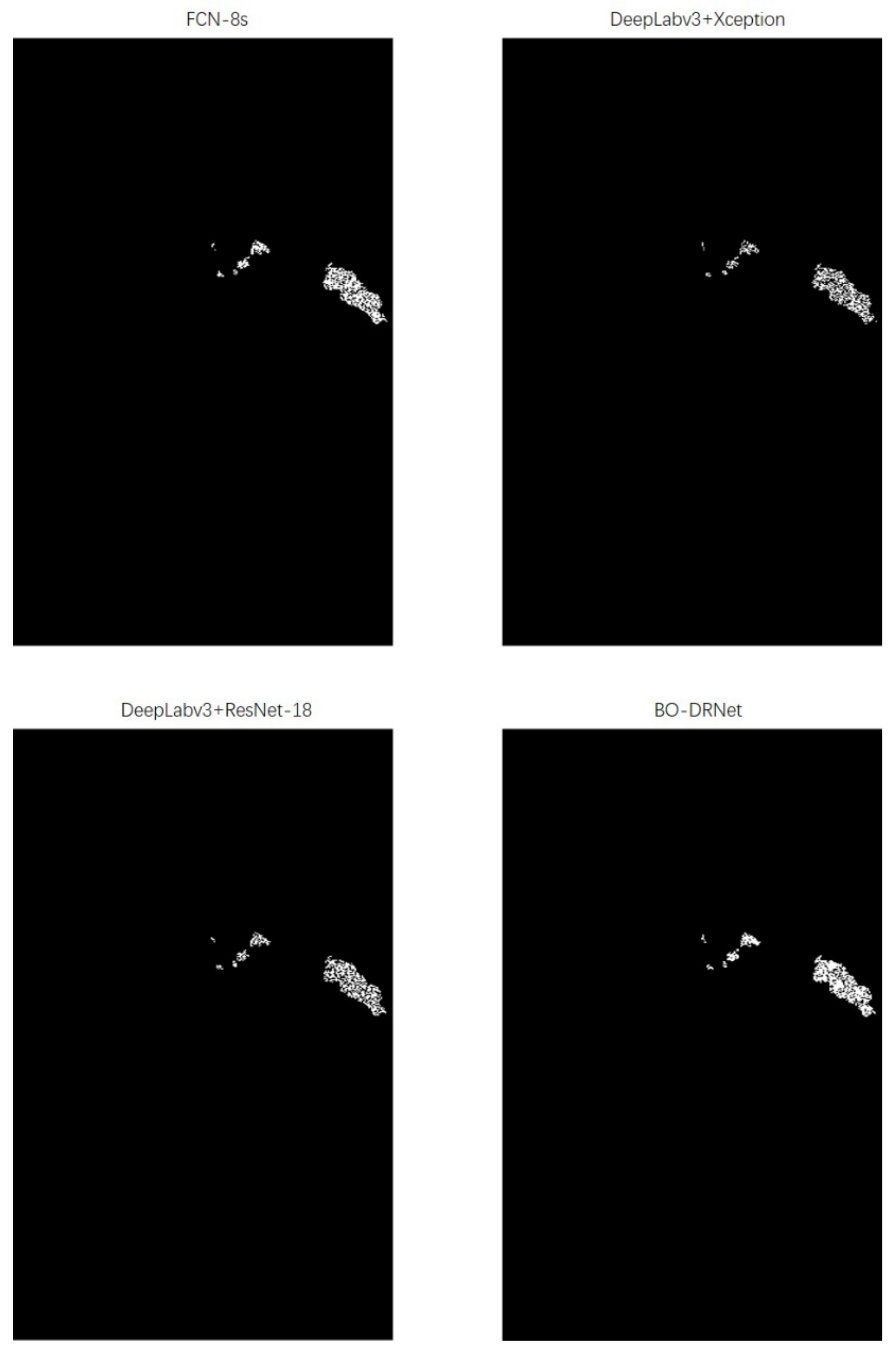
3.5. Validation
4. Discussion
4.1. Impact of the Training Set Number
4.2. Impact of the Hyperparameter
4.3. Future Study
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Kvenvolden, K.A.; Cooper, C.K. Natural seepage of crude oil into the marine environment. Geo-Mar. Lett. 2003, 23, 140–146. [Google Scholar] [CrossRef]
- Jiao, Z.; Jia, G.; Cai, Y. A new approach to oil spill detection that combines deep learning with unmanned aerial vehicles. Comput. Ind. Eng. 2019, 135, 1300–1311. [Google Scholar] [CrossRef]
- Liu, Y.; MacFadyen, A.; Ji, Z.G.; Weisberg, R.H. (Eds.) Monitoring and Modeling the Deepwater Horizon Oil Spill: A Recordbreaking Enterprise; American Geophysical Union, Geopress: Washington, DC, USA, 2011; Volume 195, p. 271. [Google Scholar]
- White, H.K.; Hsing, P.Y.; Cho, W.; Shank, T.M.; Cordes, E.E.; Quattrini, A.M.; Nelson, R.K.; Camilli, R.; Demopoulos, A.W.J.; German, C.R.; et al. Impact of the Deepwater Horizon oil spill on a deep-water coral community in the Gulf of Mexico. Proc. Natl. Acad. Sci. USA 2012, 109, 20303–20308. [Google Scholar] [CrossRef] [Green Version]
- Keramitsoglou, I.; Cartalis, C.; Kiranoudis, C.T. Automatic identification of oil spills on satellite images. Environ. Model. Softw. 2006, 21, 640–652. [Google Scholar] [CrossRef]
- Skrunes, S.; Brekke, C.; Eltoft, T. Characterization of marine surface slicks by Radarsat-2 multipolarization features. IEEE Trans. Geosci. Remote Sens. 2013, 52, 5302–5319. [Google Scholar] [CrossRef] [Green Version]
- Zheng, H.; Zhang, Y.; Wang, Y.; Zhang, X.; Meng, J. The polarimetric features of oil spills in full polarimetric synthetic aperture radar images. Acta Oceanol. Sin. 2017, 36, 105–114. [Google Scholar] [CrossRef]
- Zeng, K.; Wang, Y. A deep convolutional neural network for oil spill detection from spaceborne SAR images. Remote Sens. 2020, 12, 1015. [Google Scholar] [CrossRef] [Green Version]
- Zhang, B.; Perrie, W.; Li, X.; Pichel, W.G. Mapping sea surface oil slicks using RADARSAT-2 quad-polarization SAR image. Geophys. Res. Lett. 2011, 38. [Google Scholar] [CrossRef] [Green Version]
- Zheng, H.; Zhang, Y.; Wang, Y. Polarimetric features analysis of oil spills in C-band and L-band SAR images. In Proceedings of the International Geoscience and Remote Sensing Symposium, IGARSS 2016, Beijing, China, 11–15 July 2016; pp. 4683–4686. [Google Scholar]
- Migliaccio, M.; Nunziata, F.; Buono, A. SAR polarimetry for sea oil slick observation. Int. J. Remote Sens. 2015, 36, 3243–3273. [Google Scholar] [CrossRef] [Green Version]
- Nunziata, F.; Migliaccio, M.; Li, X. Sea oil slick observation using hybrid-polarity SAR architecture. IEEE J. Ocean. Eng. 2014, 40, 426–440. [Google Scholar] [CrossRef]
- Migliaccio, M.; Gambardella, A.; Tranfaglia, M. SAR polarimetry to observe oil spills. IEEE Trans. Geosci. Remote Sens. 2007, 45, 506–511. [Google Scholar] [CrossRef]
- Migliaccio, M.; Nunziata, F.; Gambardella, A. On the co-polarized phase difference for oil spill observation. Int. J. Remote Sens. 2009, 30, 1587–1602. [Google Scholar] [CrossRef]
- Skrunes, S.; Brekke, C.; Eltoft, T. Oil spill characterization with multi-polarization C-and X-band SAR. In Proceedings of the International Geoscience and Remote Sensing Symposium, IGARSS 2012, Munich, Germany, 22–27 July 2012; pp. 5117–5120. [Google Scholar]
- Bing, D.; Jinsong, C. An algorithm based on cross-polarization ratio of SAR image for discriminating between mineral oil and biogenic oil. Remote Sens. Technol. Appl. 2013, 28, 103–107. [Google Scholar]
- Yin, J.; Moon, W.; Yang, J. Model-based pseudo-quad-pol reconstruction from compact polarimetry and its application to oil-spill observation. J. Sens. 2015, 2015. [Google Scholar] [CrossRef]
- Shirvany, R.; Chabert, M.; Tourneret, J.Y. Ship and oil-spill detection using the degree of polarization in linear and hybrid/compact dual-pol SAR. IEEE J. Sel. Top. Appl. Earth Observ. 2012, 5, 885–892. [Google Scholar] [CrossRef] [Green Version]
- Migliaccio, M.; Nunziata, F.; Montuori, A.; Li, X.; Pichel, W.G. A multifrequency polarimetric SAR processing chain to observe oil fields in the Gulf of Mexico. IEEE Trans. Geosci. Remote Sens. 2011, 49, 4729–4737. [Google Scholar] [CrossRef]
- Song, D.; Wang, B.; Chen, W.; Wang, N.; Yu, S.; Ding, Y.; Liu, B.; Zhen, Z.; Xu, M.; Zhang, T. An efficient marine oil spillage identification scheme based on an improved active contour model using fully polarimetric SAR imagery. IEEE Access 2018, 6, 67959–67981. [Google Scholar] [CrossRef]
- Garcia-Pineda, O.; Zimmer, B.; Howard, M.; Pichel, W.; Li, X.; MacDonald, I.R. Using SAR images to delineate ocean oil slicks with a texture-classifying neural network algorithm (TCNNA). Can. J. Remote Sens. 2009, 35, 411–421. [Google Scholar] [CrossRef]
- Solberg, A.H.S.; Solberg, R. A large-scale evaluation of features for automatic detection of oil spills in ERS SAR image. In Proceedings of the International Geoscience and Remote Sensing Symposium, IGARSS 1996, Lincoln, NE, USA, 2–31 May 1996; pp. 1484–1486. [Google Scholar]
- Topouzelis, K.; Psyllosm, A. Oil spill feature selection and classification using decision tree forest on SAR image data. ISPRS J. Photogramm. Remote Sens. 2012, 68, 135–143. [Google Scholar] [CrossRef]
- Singha, S.; Vespe, M.; Trieschmann, O. Automatic Synthetic Aperture Radar based oil spill detection and performance estimation via a semi-automatic operational service benchmark. Mar. Pollut. Bull. 2013, 73, 199–209. [Google Scholar] [CrossRef]
- Topouzelis, K.; Karathanassi, V.; Pavlakis, P.; Rokos, D. Detection and discrimination between oil spills and look-alike phenomena through neural networks. ISPRS J. Photogramm. Remote Sens. 2007, 62, 264–270. [Google Scholar] [CrossRef]
- Del Frate, F.; Petrocchi, A.; Lichtenegger, J.; Calabresi, G. Neural networks for oil spill detection using ERS-SAR data. IEEE Trans. Geosci. Remote Sens. 2000, 38, 2282–2287. [Google Scholar] [CrossRef] [Green Version]
- Singha, S.; Bellerby, T.J.; Trieschmann, O. Satellite oil spill detection using artificial neural networks. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2013, 6, 2355–2363. [Google Scholar] [CrossRef]
- Brekke, C.; Solberg, A.H.S. Classifiers and confidence estimation for oil spill detection in ENVISAT ASAR images. IEEE Geosci. Remote Sens. Lett. 2008, 5, 65–69. [Google Scholar] [CrossRef]
- Xu, L.; Li, J.; Brenning, A. A comparative study of different classification techniques for marine oil spill identification using RADARSAT-1 imagery. Remote Sens. Environ. 2014, 141, 14–23. [Google Scholar] [CrossRef]
- Singha, S.; Ressel, R.; Velotto, D.; Lehner, S. A combination of traditional and polarimetric features for oil spill detection using TerraSAR-X. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2016, 9, 4979–4990. [Google Scholar] [CrossRef] [Green Version]
- Solberg, A.H.S.; Volden, E. Incorporation of prior knowledge in automatic classification of oil spills in ERS SAR images. In Proceedings of the International Geoscience and Remote Sensing Symposium, IGARSS 1997, Singapore, 3–8 August 1997; pp. 157–159. [Google Scholar]
- Solberg, A.H.S.; Storvik, G.; Solberg, R.; Volden, E. Automatic detection of oil spills in ERS SAR images. IEEE Trans. Geosci. Remote Sens. 1999, 37, 1916–1924. [Google Scholar] [CrossRef] [Green Version]
- Huang, X.; Wang, X. The classification of synthetic aperture radar oil spill images based on the texture features and deep belief network. In Computer Engineering and Networking; Springer: Cham, Switzerland, 2014; pp. 661–669. [Google Scholar]
- Chen, G.; Li, Y.; Sun, G.; Zhang, Y. Application of deep networks to oil spill detection using polarimetric synthetic aperture radar images. Appl. Sci. 2017, 7, 968. [Google Scholar] [CrossRef]
- Gallego, A.J.; Gil, P.; Pertusa, A.; Fisher, R. Segmentation of oil spills on side-looking airborne radar imagery with autoencoders. Sensors 2018, 18, 797. [Google Scholar] [CrossRef] [Green Version]
- Shaban, M.; Salim, R.; Abu Khalifeh, H.; Khelifi, A.; Shalaby, A.; EI-Mashad, S.; Mahmoud, A.; Ghazal, M.; EI-Baz, A. A Deep-Learning Framework for the Detection of Oil Spills from SAR Data. Sensors 2021, 21, 2351. [Google Scholar] [CrossRef]
- Ma, X.; Xu, J.; Wu, P.; Kong, P. Oil Spill Detection Based on Deep Convolutional Neural Networks using Polarimetric Scattering Information from Sentinel-1 SAR Images. IEEE Trans. Geosci. Remote Sens. 2021. [Google Scholar] [CrossRef]
- Krestenitis, M.; Orfanidis, G.; Ioannidis, K.; Avgerinakis, k.; Vrochidis, S.; Kompatsiaris, I. Oil spill identification from satellite images using deep neural networks. Remote Sens. 2019, 11, 1762. [Google Scholar] [CrossRef] [Green Version]
- Guo, H.; Wu, D.; An, J. Discrimination of oil slicks and lookalikes in polarimetric SAR images using CNN. Sensors 2017, 17, 1837. [Google Scholar] [CrossRef] [Green Version]
- He, K.; Zhang, X.; Ren, S.; Sun, J. Deep residual learning for image recognition. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, CVPR 2016, Las Vegas, NV, USA, 27–30 June 2016; pp. 770–778. [Google Scholar]
- Chen, L.C.; Zhu, Y.; Papandreou, G.; Schroff, F.; Adam, H. Encoder-decoder with atrous separable convolution for semantic image segmentation. In Proceedings of the European Conference on Computer Vision, ECCV 2018, Munich, Germany, 8–14 September 2018; pp. 801–818. [Google Scholar]
- Frazier, P.I. A tutorial on Bayesian optimization. arXiv 2018, arXiv:1807.02811. [Google Scholar]
- Chen, Y.; Jiang, H.; Li, C.; Jia, X.; Ghamisi, P. Deep feature extraction and classification of hyperspectral images based on convolutional neural networks. IEEE Trans. Geosci. Remote Sens. 2016, 54, 6232–6250. [Google Scholar] [CrossRef] [Green Version]
- Claesen, M.; De Moor, B. Hyperparameter search in machine learning. arXiv 2015, arXiv:1502.02127. [Google Scholar]
- Zhang, L.; Zhang, L.; Du, B. Deep learning for remote sensing data: A technical tutorial on the state of the art. IEEE Geosci. Remote Sens. Mag. 2016, 4, 22–40. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Image 1 | Image 2 | Image 3 | |
|---|---|---|---|
| Time (UTC) | 2010-05-08-12:01:25 | 2011-06-17-11:48:20 | 2015-05-08-23:53:36 |
| Product type | SLC | SLC | SLC |
| Polarization | HH, VV, HV, VH | HH, VV, HV, VH | HH, VV, HV, VH |
| Beams | FQ23 | Q25 | Q8 |
| Pixel spacing | 4.73 m × 4.95 m | 4.73 m × 5.05 m | 4.73 m × 4.78 m |
| Size | 6281 × 3920 | 7360 × 4089 | 6893 × 4904 |
| Dataset 1 | Dataset 2 | Dataset 3 | |
|---|---|---|---|
| Number of oil spill pixels | 634,916 | 421,332 | 609,964 |
| Hyper-Parameter | Description | Value Ranges | The Optimal Value |
|---|---|---|---|
| Initial learning rate | The best learning rate depend on your data when the network is training. | 0.1235 | |
| Stochastic gradient descent momentum | Momentum adds inertia to the parameter updates by having the current update contain a contribution proportional to the update in the previous iteration. | 0.8018 | |
| L2 regularization strength | Use regularization to prevent overfitting. Search the space of regularization strength to find a good value. |
| Hyperparameters | Value |
|---|---|
| Patches Per Image | 1600 |
| Initial learning rate | 0.05 |
| Stochastic gradient descent momentum | 0.90 |
| Epoch | 10 |
| Mini batch size | 16 |
| L2 regularization strength |
| Model | FCN-8s | DeepLabv3+Xception | DeepLabv3+Resnet18 | BO-DRNet | |
|---|---|---|---|---|---|
| Accuracy (%) | Dataset 1 | 70.16 | 54.31 | 59.93 | 75.06 |
| Dataset 2 | 70.19 | 56.92 | 60.81 | 74.64 | |
| Dataset 3 | 69.89 | 55.03 | 59.48 | 74.38 | |
| Mean accuracy (%) | 70.08 | 55.42 | 60.07 | 74.69 | |
| dice | Dataset 1 | 0.8247 | 0.7039 | 0.7494 | 0.8575 |
| Dataset 2 | 0.8248 | 0.7254 | 0.7563 | 0.8548 | |
| Dataset 3 | 0.8228 | 0.7099 | 0.7459 | 0.8531 | |
| Mean dice | 0.8241 | 0.7131 | 0.7505 | 0.8551 |
| SAR Image | |
|---|---|
| Time (UTC) | 2011-06-08-17:27:53 |
| Product type | SLC |
| Polarization | HH, VV, HV, VH |
| Beams | Q15 |
| Pixel spacing | 4.73 m × 4.82 m |
| Size | 7120 × 3369 |
| Model | FCN-8s | DeepLabv3+Xception | DeepLabv3+resnet18 | BO-DRNet |
|---|---|---|---|---|
| Accuracy (%) | 69.95 | 57.48 | 58.55 | 75.03 |
| Dice | 0.8232 | 0.7300 | 0.7386 | 0.8573 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, D.; Wan, J.; Liu, S.; Chen, Y.; Yasir, M.; Xu, M.; Ren, P. BO-DRNet: An Improved Deep Learning Model for Oil Spill Detection by Polarimetric Features from SAR Images. Remote Sens. 2022, 14, 264. https://doi.org/10.3390/rs14020264
Wang D, Wan J, Liu S, Chen Y, Yasir M, Xu M, Ren P. BO-DRNet: An Improved Deep Learning Model for Oil Spill Detection by Polarimetric Features from SAR Images. Remote Sensing. 2022; 14(2):264. https://doi.org/10.3390/rs14020264
Chicago/Turabian StyleWang, Dawei, Jianhua Wan, Shanwei Liu, Yanlong Chen, Muhammad Yasir, Mingming Xu, and Peng Ren. 2022. "BO-DRNet: An Improved Deep Learning Model for Oil Spill Detection by Polarimetric Features from SAR Images" Remote Sensing 14, no. 2: 264. https://doi.org/10.3390/rs14020264
APA StyleWang, D., Wan, J., Liu, S., Chen, Y., Yasir, M., Xu, M., & Ren, P. (2022). BO-DRNet: An Improved Deep Learning Model for Oil Spill Detection by Polarimetric Features from SAR Images. Remote Sensing, 14(2), 264. https://doi.org/10.3390/rs14020264