



A Novel Low-Cost GNSS Solution for the Real-Time Deformation Monitoring of Cable Saddle Pushing: A Case Study of Guojiatuo Suspension Bridge
 ,
,
Abstract
:1. Introduction
- (1)
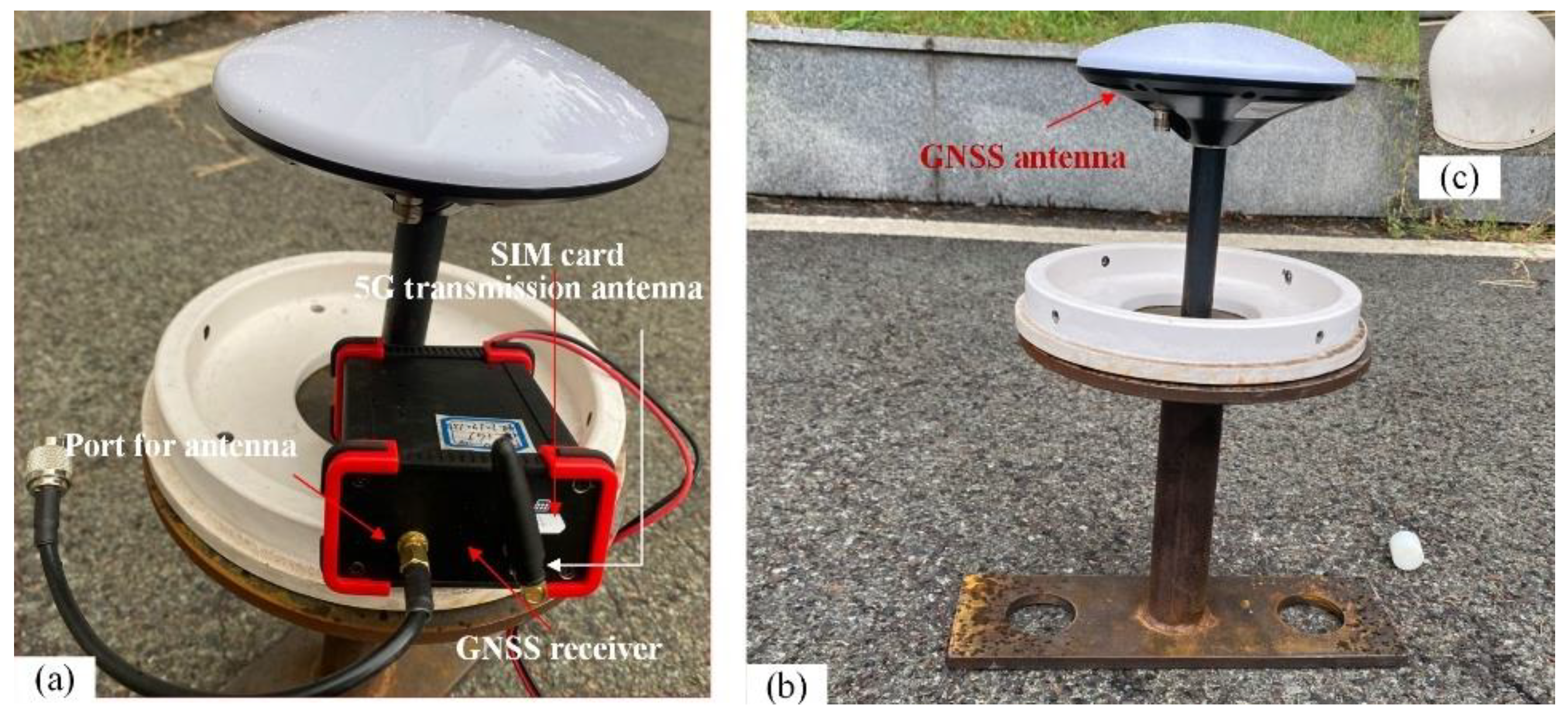
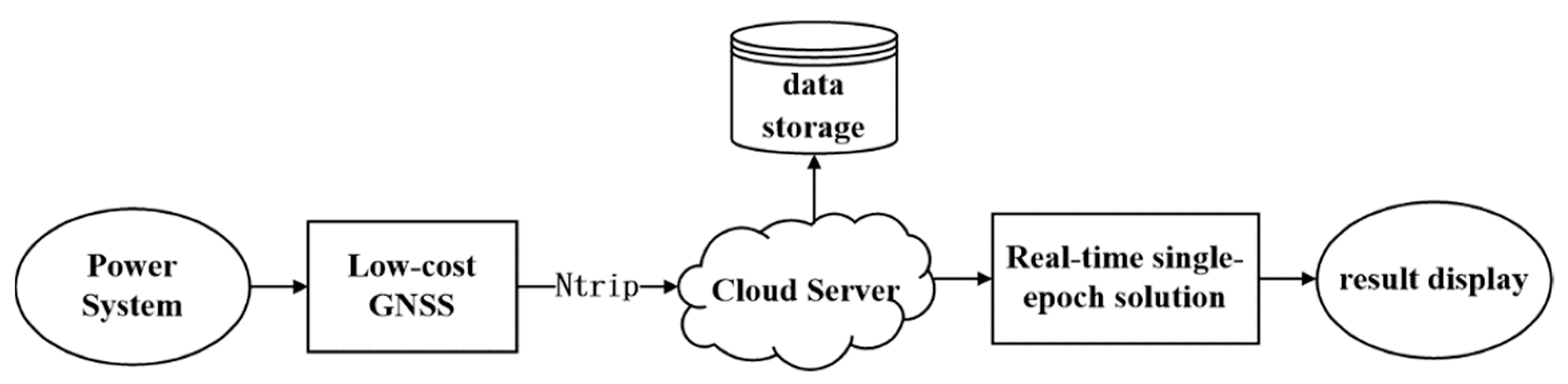
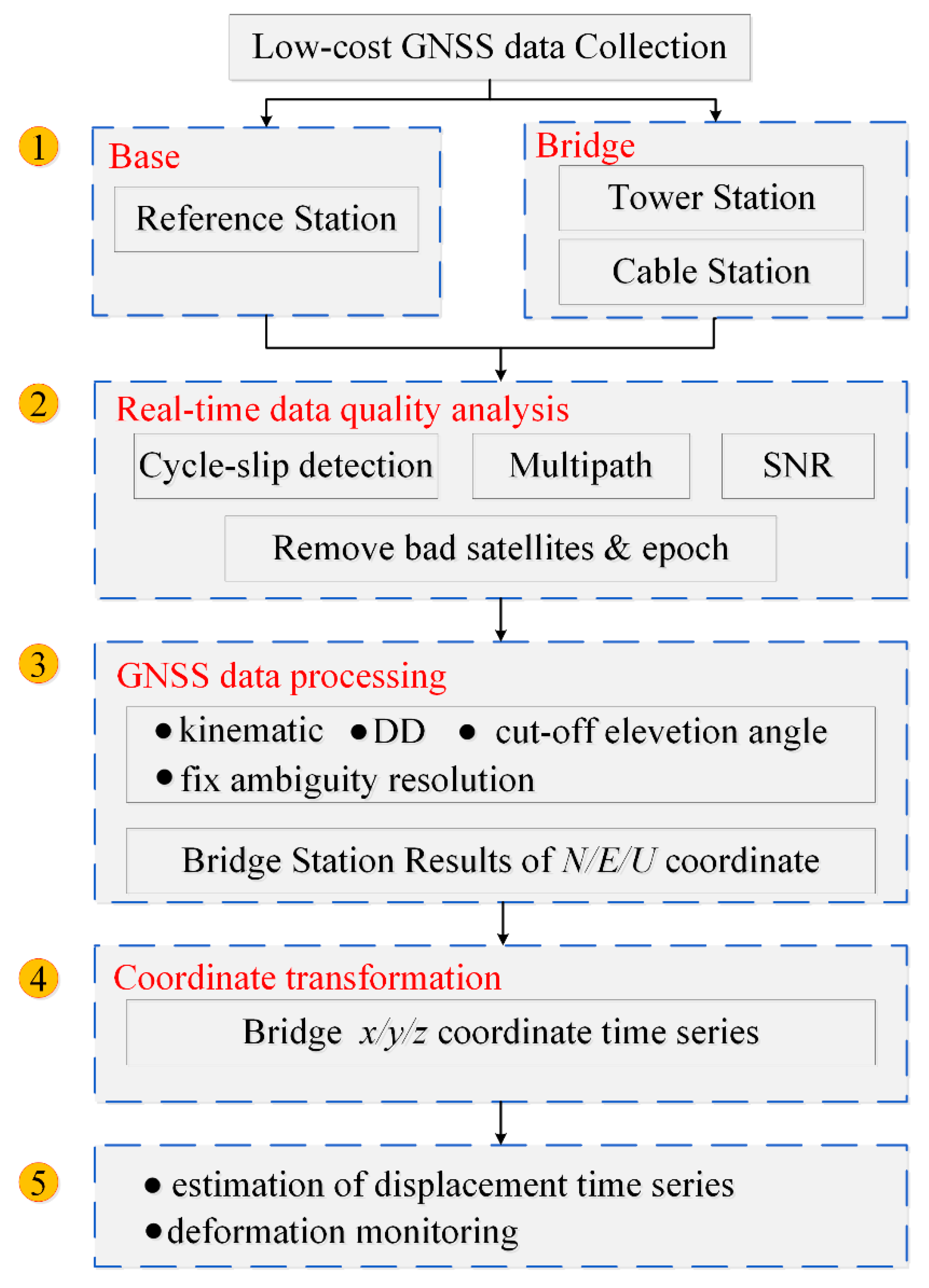
- We independently develop a low-cost GNSS sensor. Only data acquisition and data transmission modules are adopted. Then we build a real-time monitoring cloud platform based on our proposed GNSS sensors. The data records can be transmitted and processed in the cloud platform.
- (2)
- We propose a novel low-cost GNSS solution based on our developed sensors for automatic real-time dynamic monitoring of long-span suspension bridges. As a case study, the tower and cable deformation during the cable saddle pushing process are monitored. Compared with the movement measured by RTS, the accuracy of deformation measured by low-cost GNSS is within an order of one millimeter.
2. The Guojiatuo Suspension Bridge Structural Description
2.1. Research Object Background
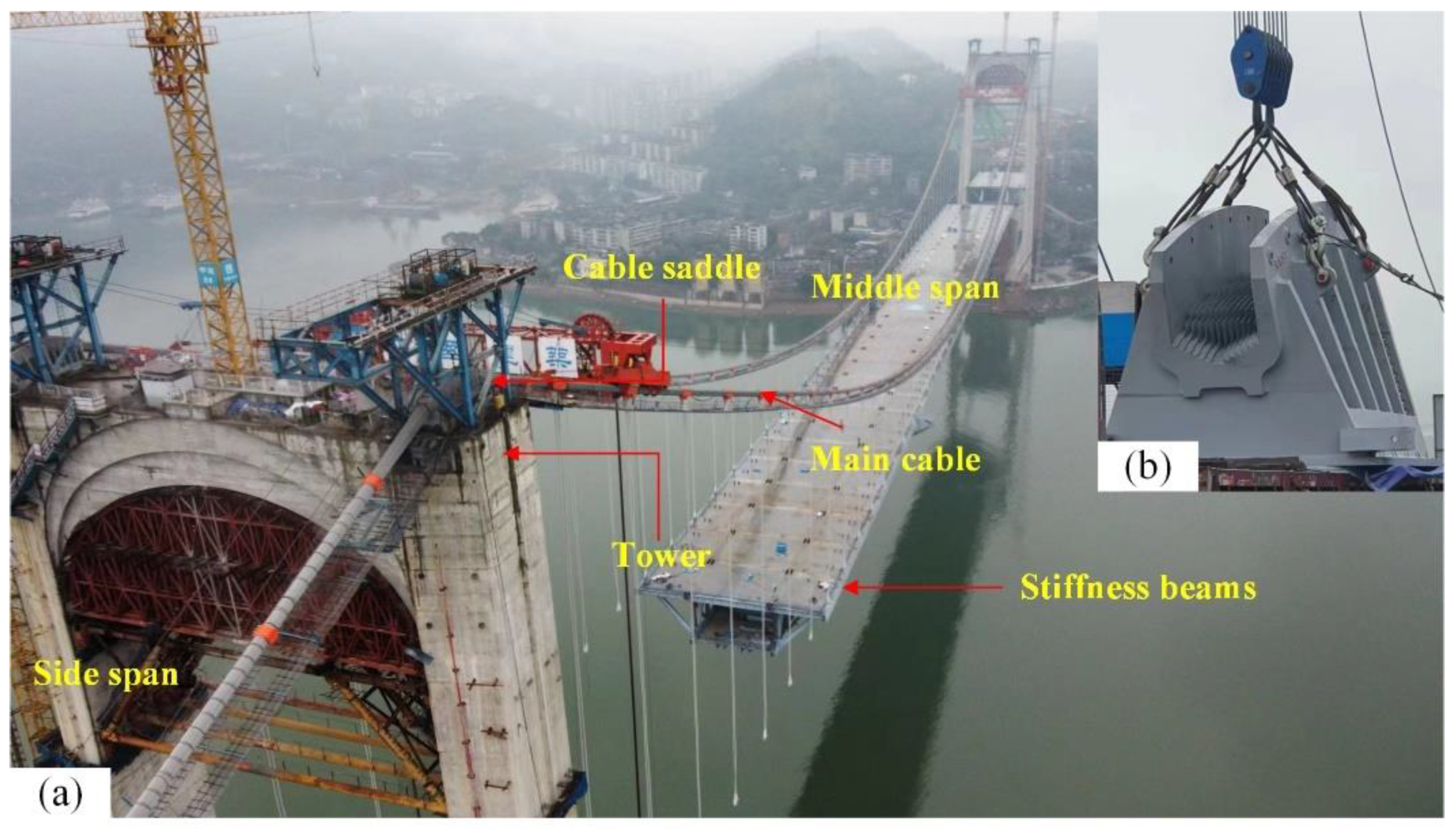
2.2. Structural Characterization of the Cable Saddle Pushing
2.2.1. Cable Saddle Pushing Description
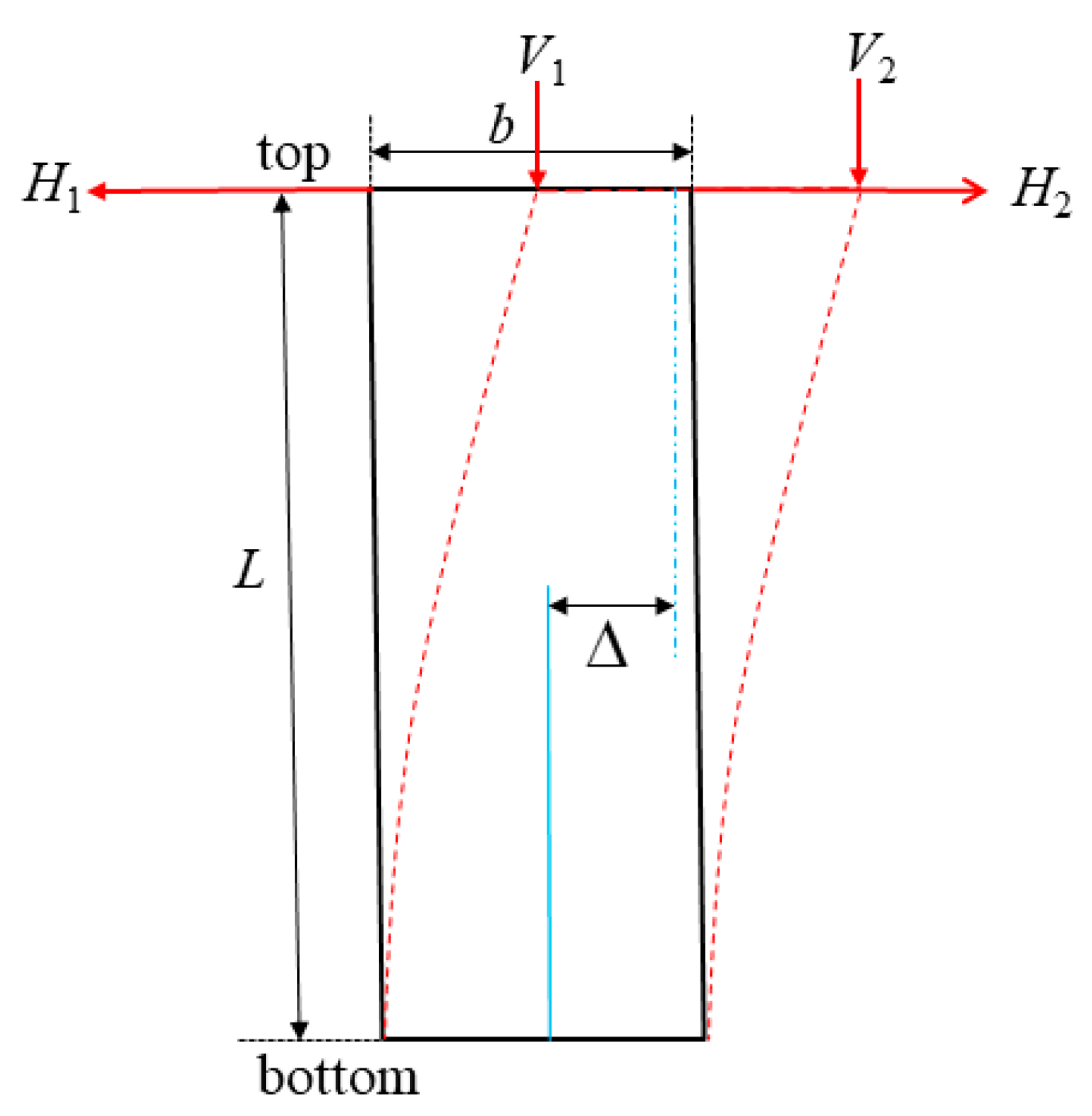
2.2.2. Determination of Unloaded Main Cable Shape and Saddle Reserved Displacement
2.2.3. Determination of Cable Saddle Pushing Time
- (1)
- Simulation method of suspension bridge construction stage
- (2)
- Simulation method of beam temporary connection
3. Materials and Methods
3.1. Low-Cost GNSS Sensor
3.2. Real-Time Low-Cost GNSS Monitoring Cloud Platform
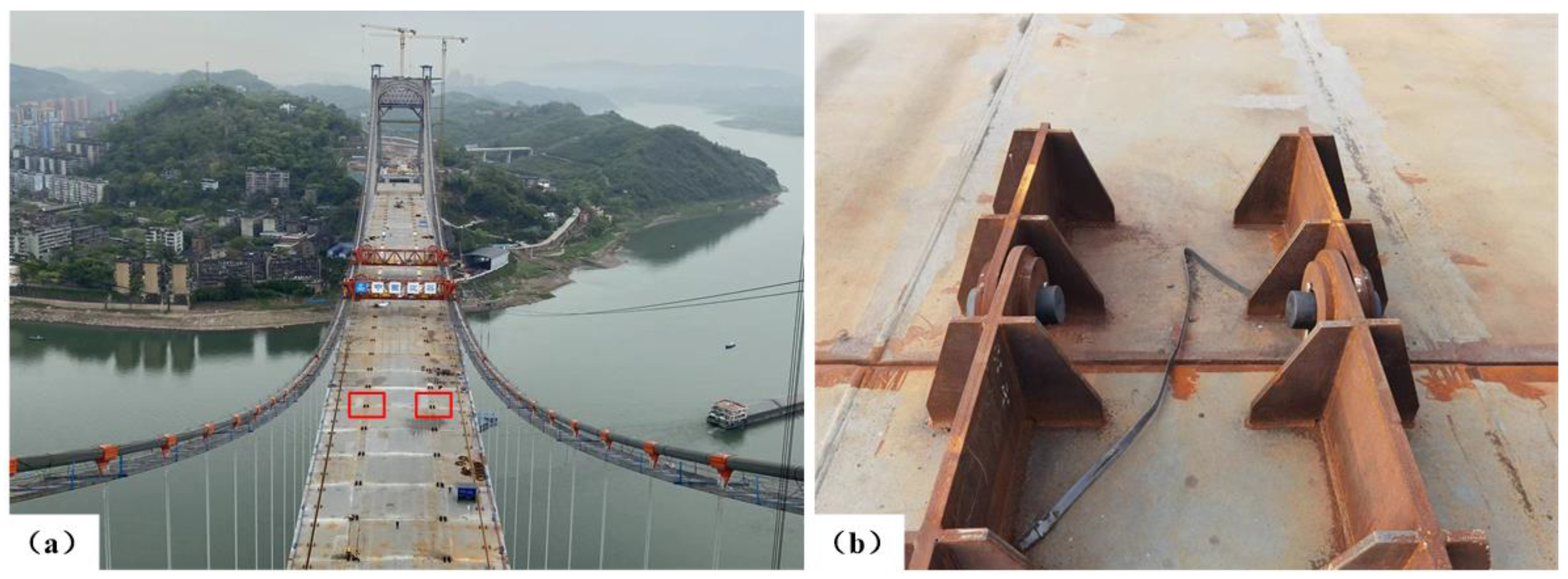
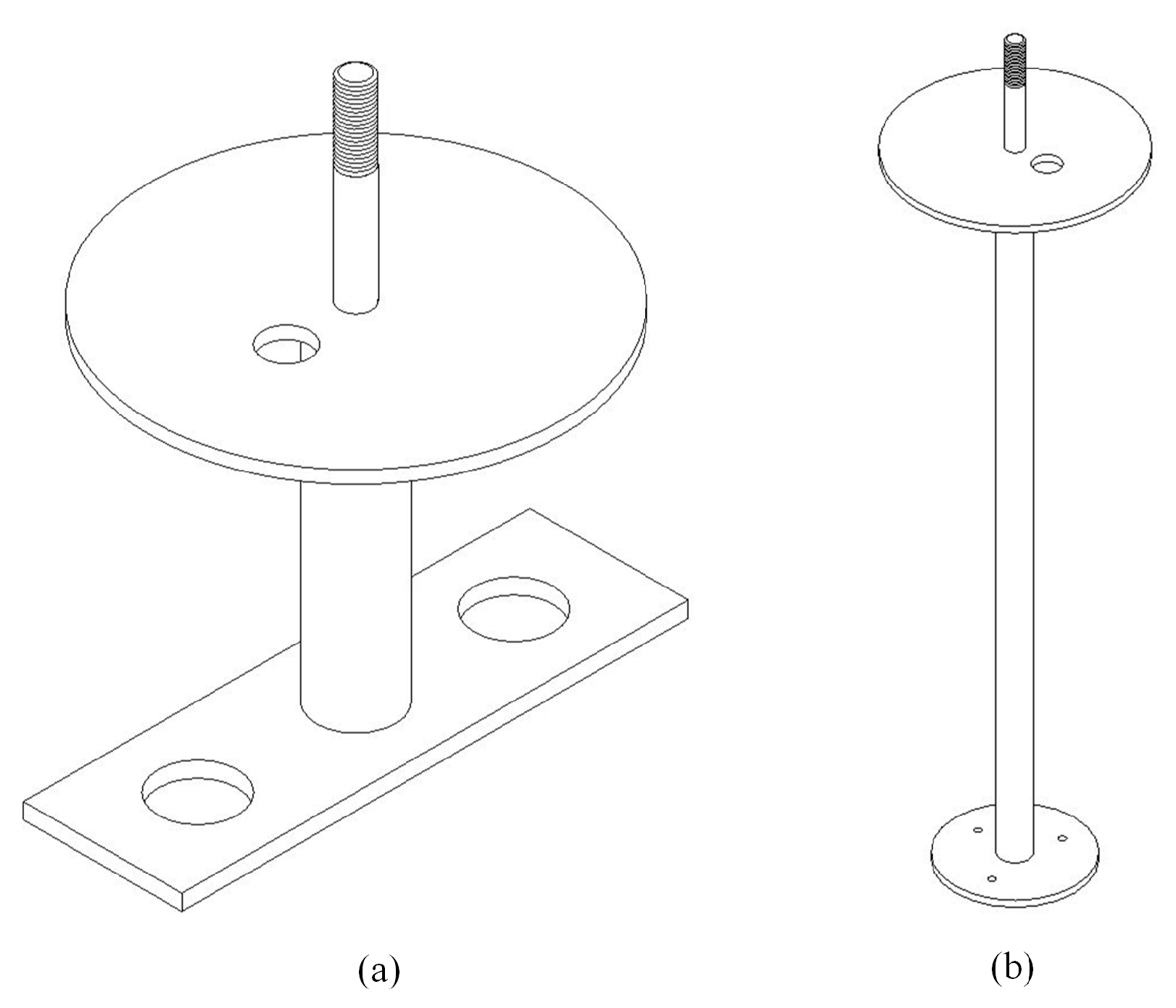
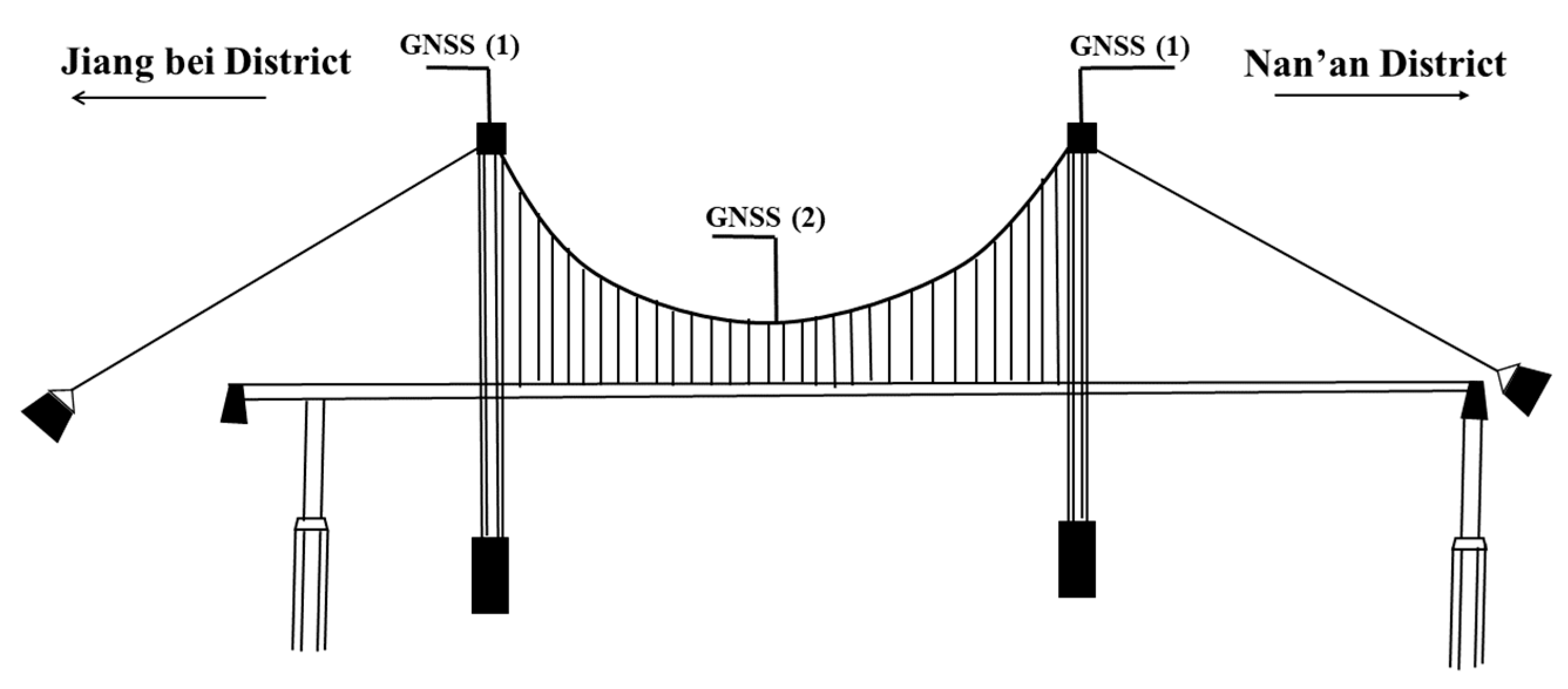
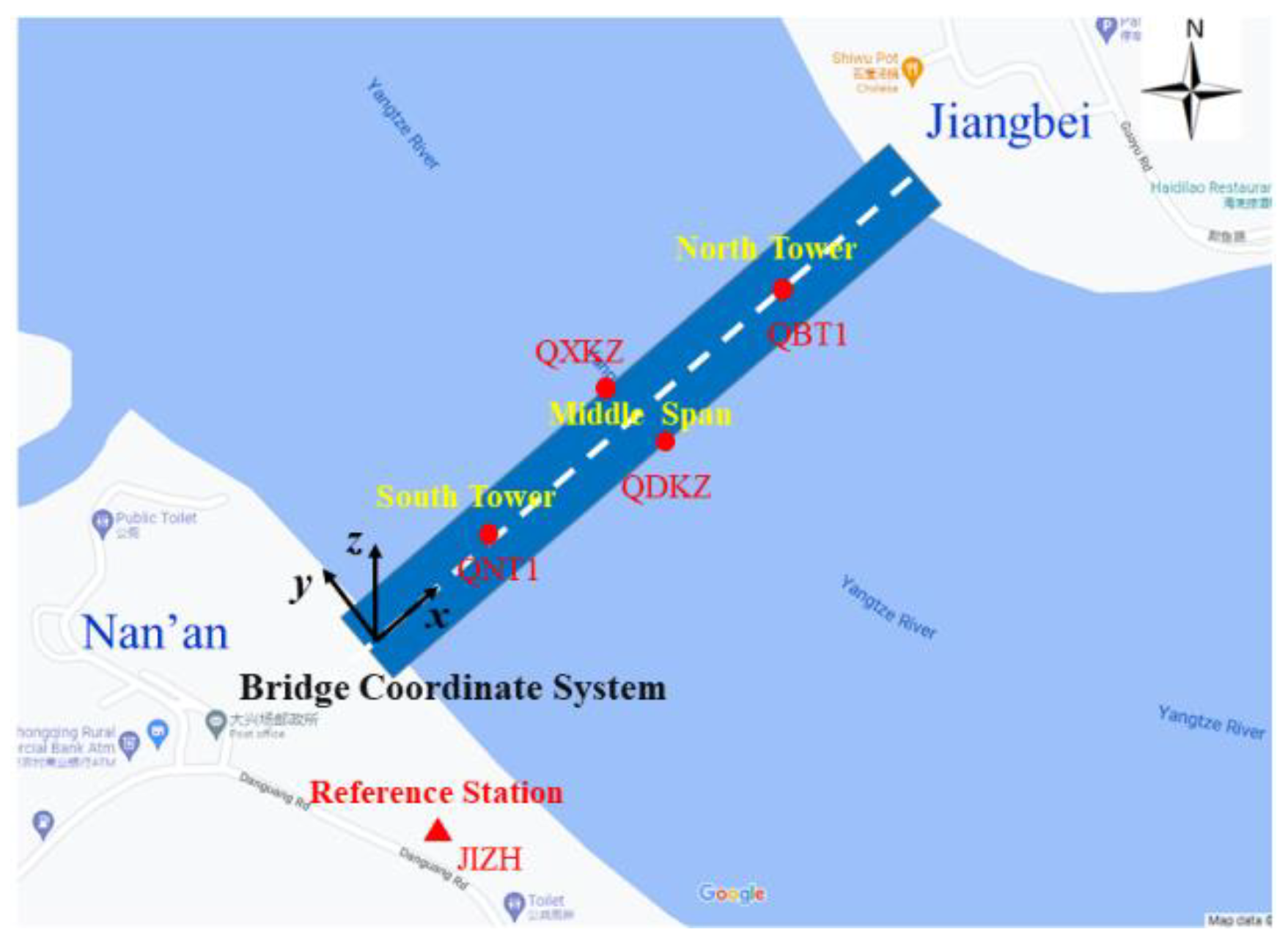
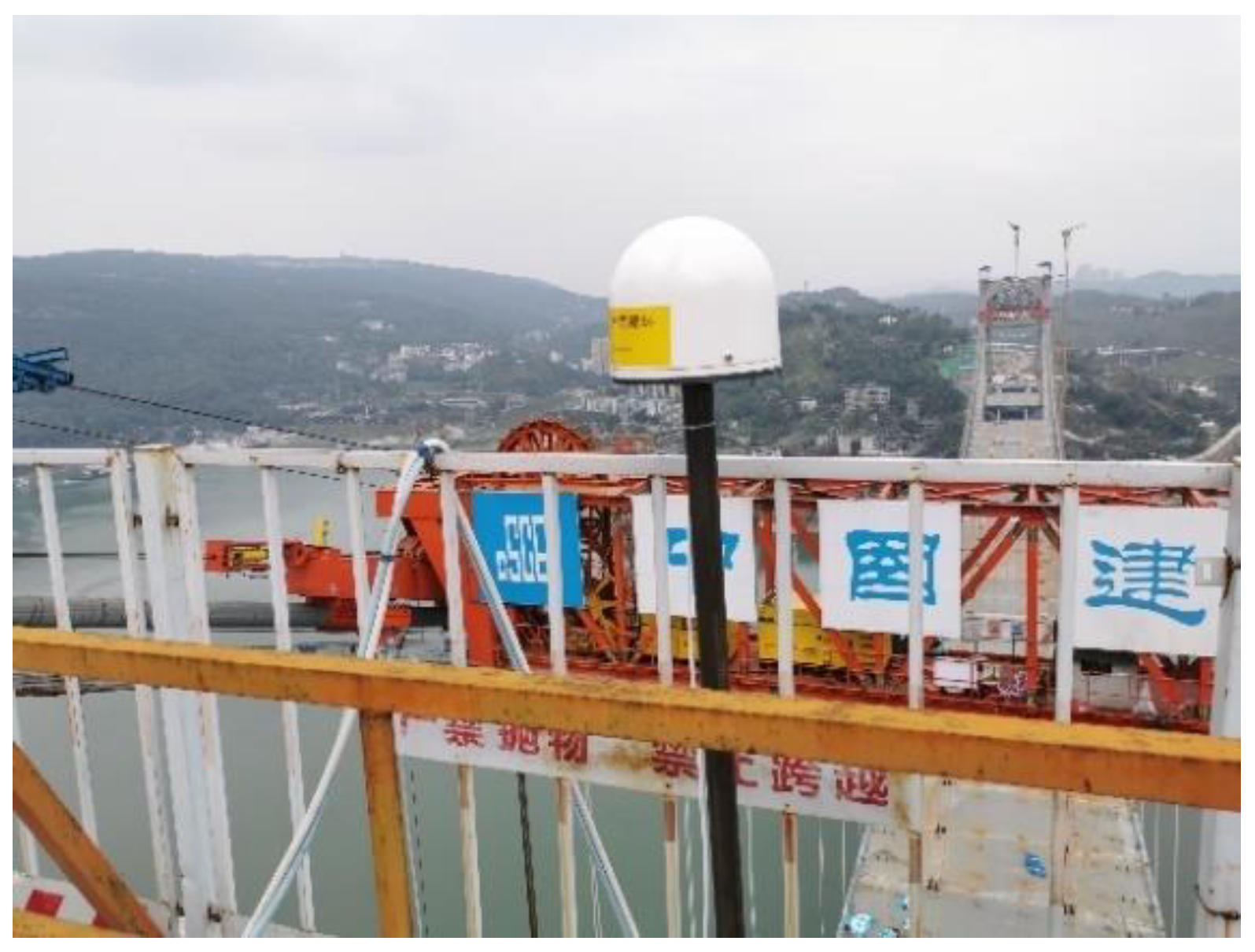
3.2.1. Installation of A Low-Cost GNSS Real-Time Monitoring System for Bridge
3.2.2. Multi-GNSS Integration Positioning Method
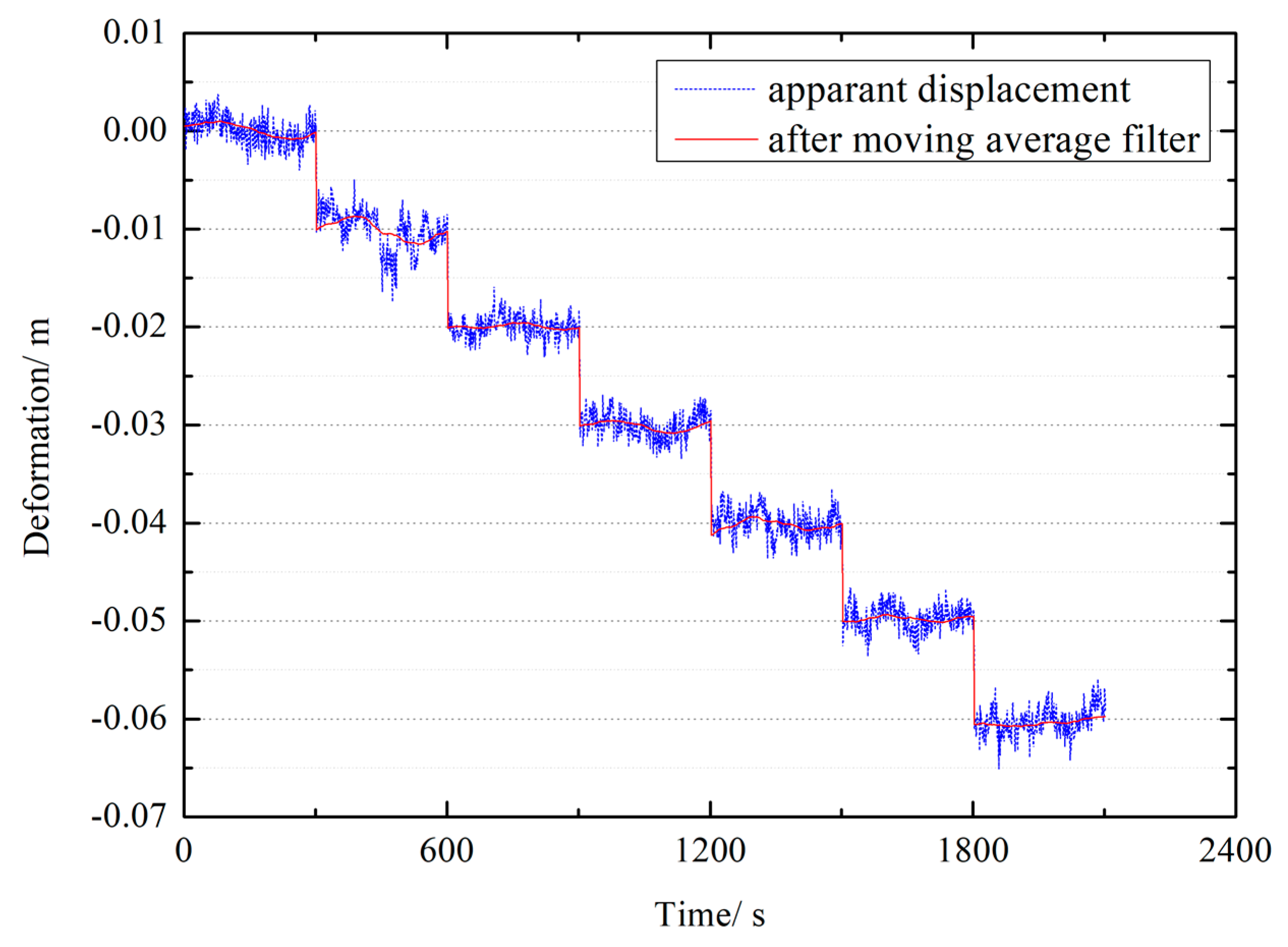
3.3. Dynamic Deformation Analysis Method
4. Experiment and Result
4.1. Data Description and Processing Strategy
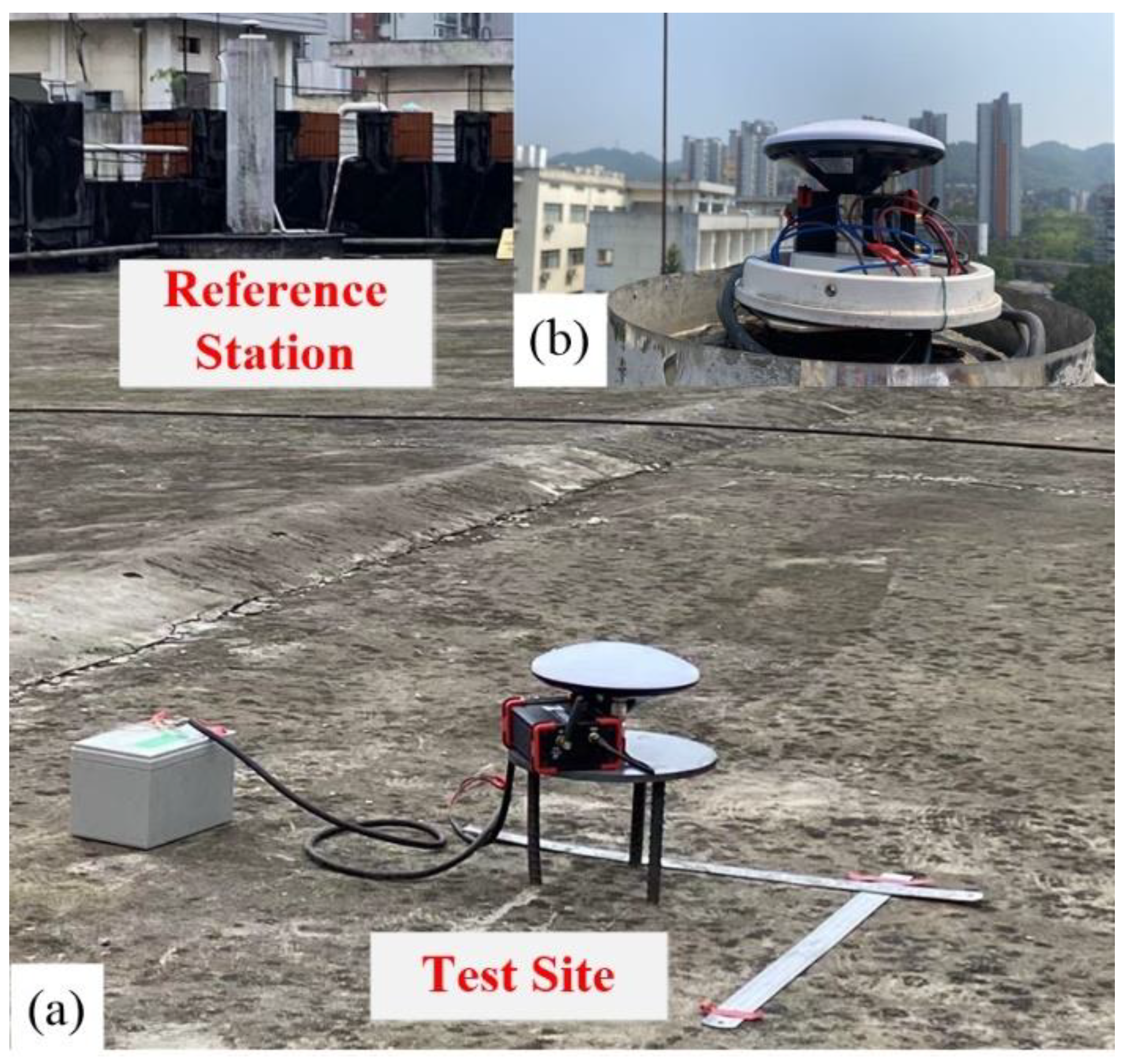
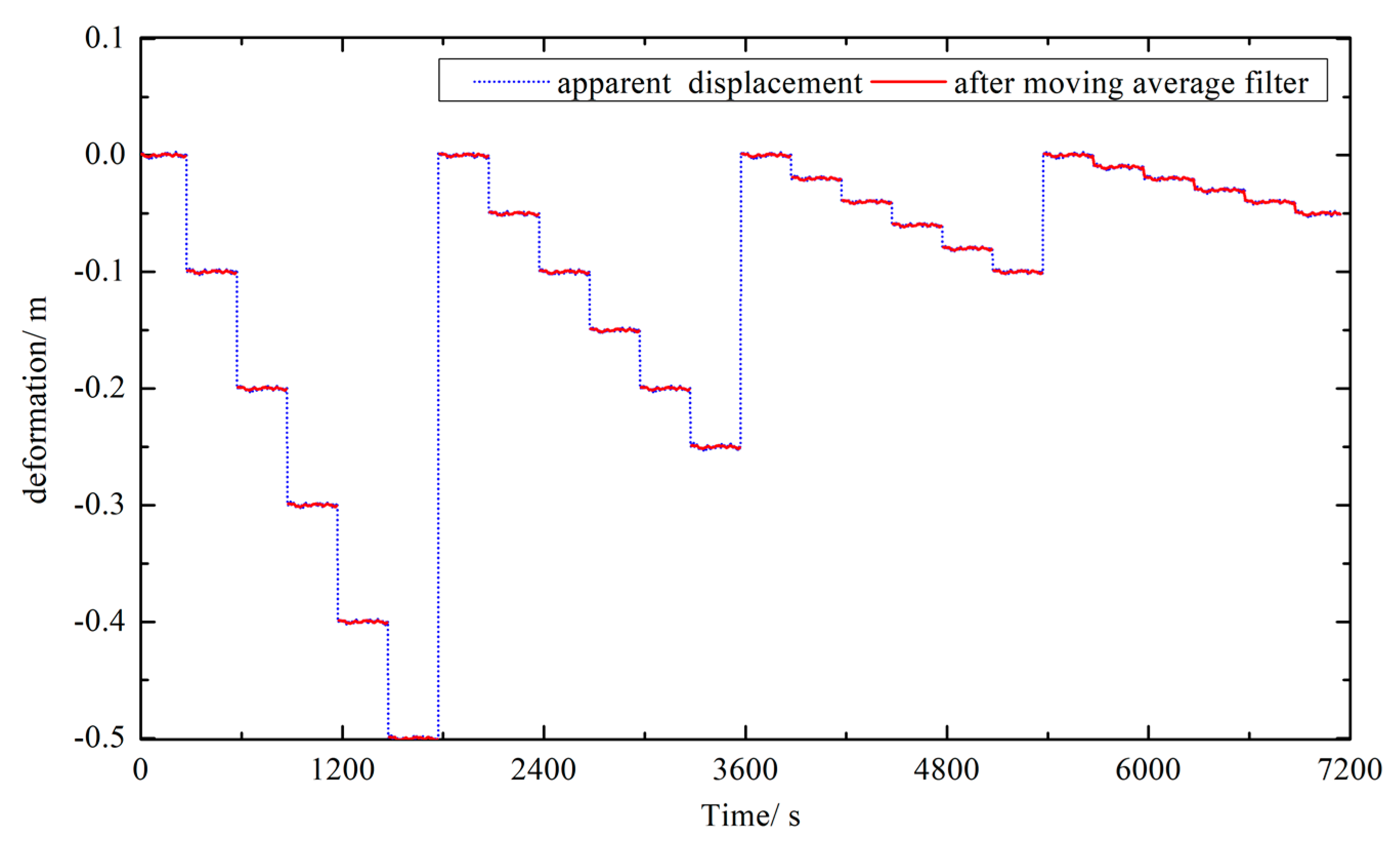
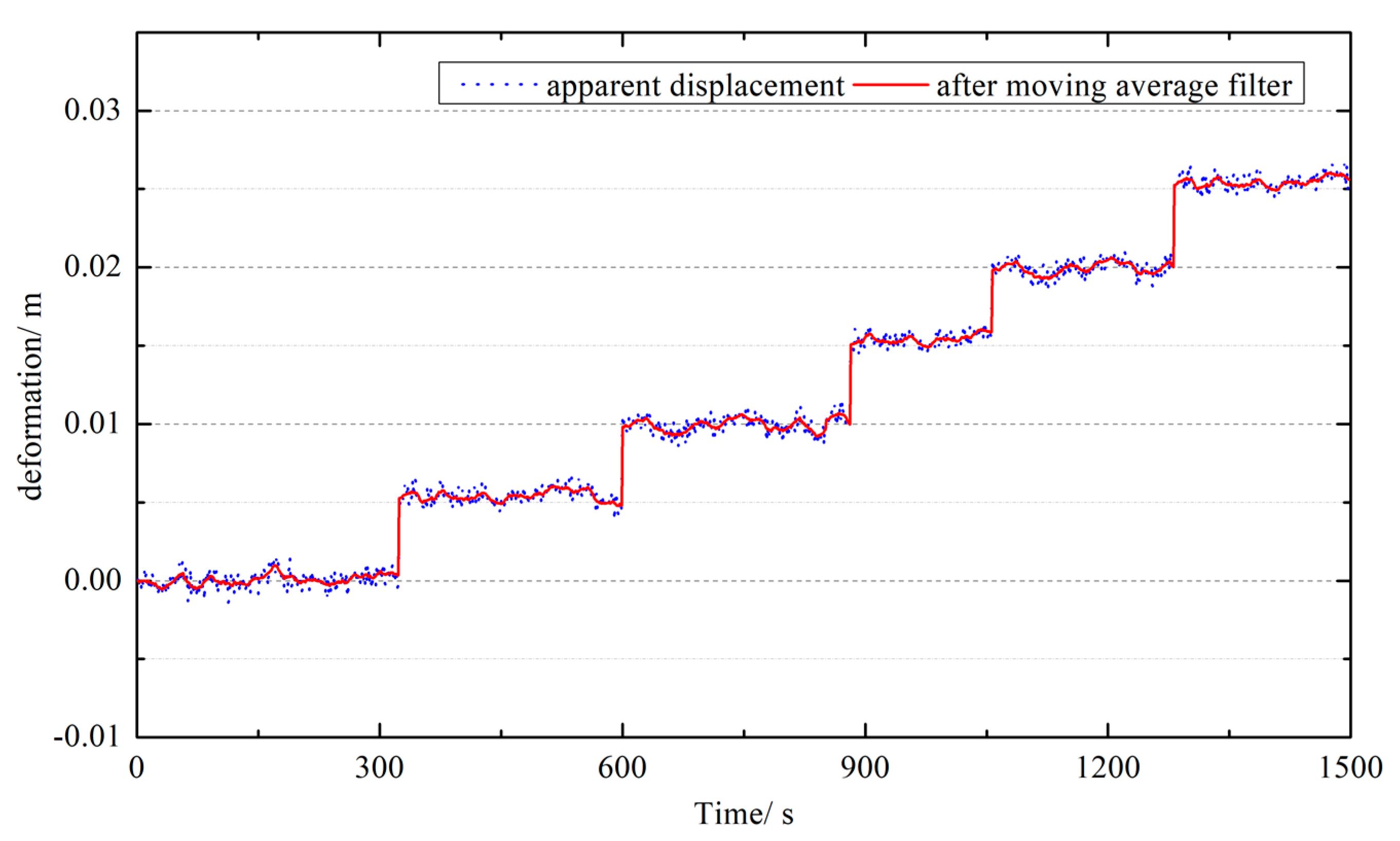
4.2. Real-Time Dynamic Performance of Low-Cost GNSS Sensors
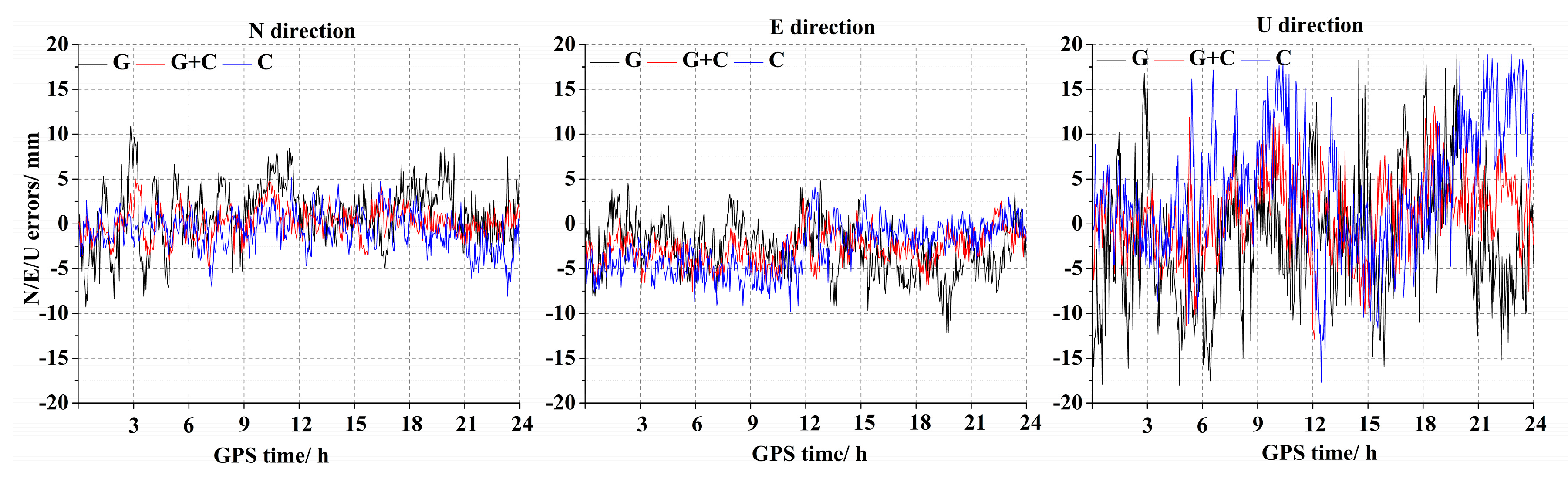
4.3. Real-Time Static Positioning Performance of Low-Cost GNSS Sensors
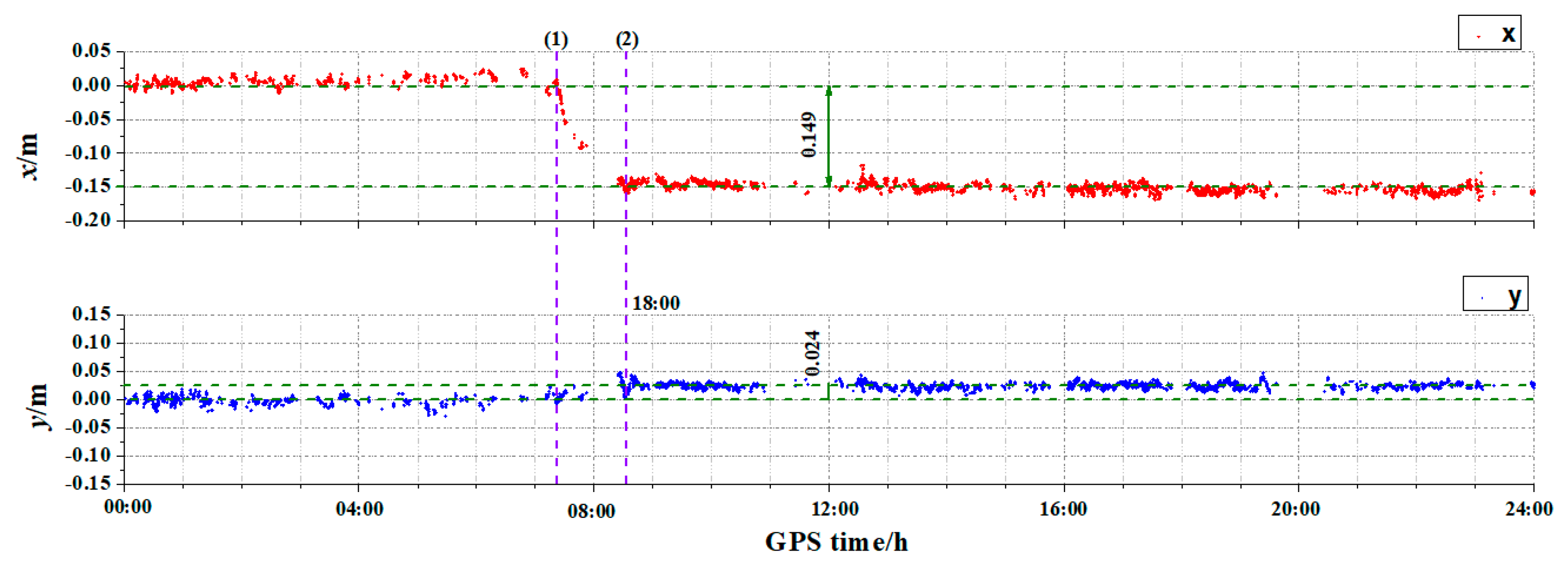
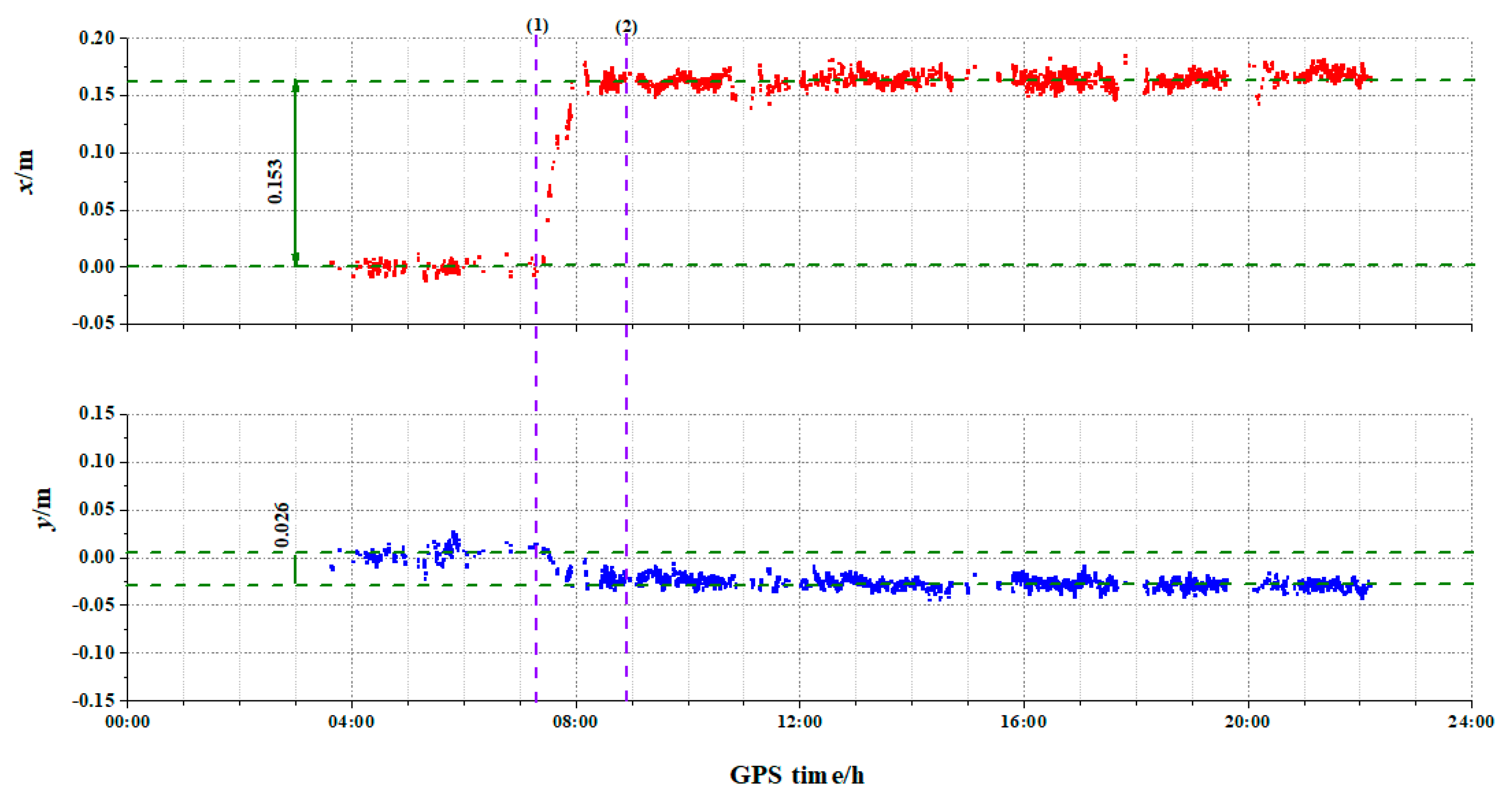
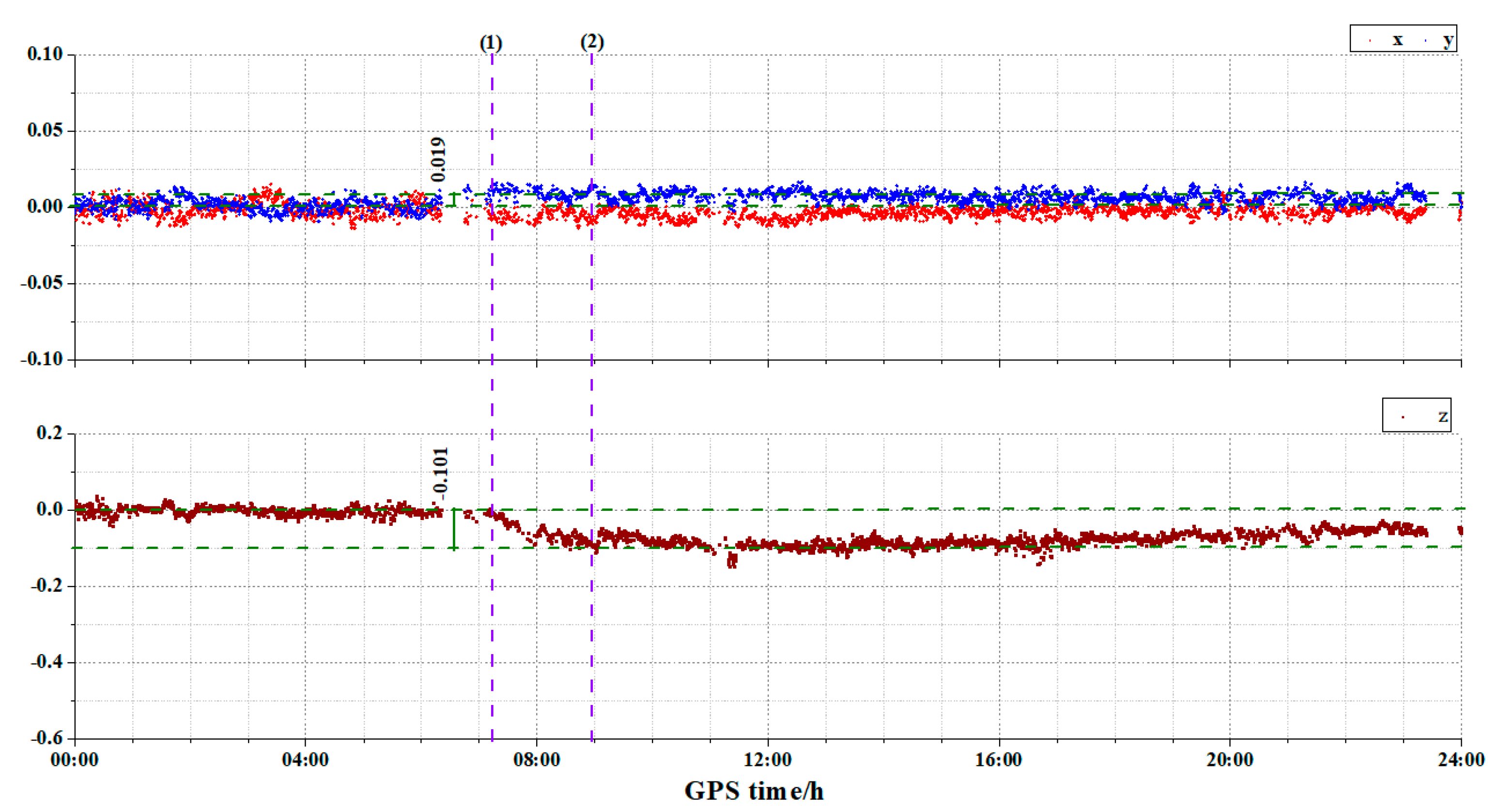
4.4. Dynamic Result of the Cable Saddle Pushing and Validation
5. Discussion and Conclusions
- Real-time, continuous and high-frequency measurements over a long period can better describe the deformation during the bridge construction and explore the inversion of the mechanical state according to the digital twin studies [51,52]. More importantly, the novel solution can detect abnormal deformation which may indicate a potential trend in bridge failure.
- The procedure is all-weather and fully automated. No human intervention is required. The system automatically sends reasonable processing result reports via E-mail and web platform, which helps the bridge managers make timely and right decisions.
- The novel low-cost GNSS solution also has some limitations: If the low-cost GNSS monitoring system starts to operate, the continuity of measurement and maintenance of the system is a fundamental task. However, in our experiment, some problems, such as the interruption of power supply, lead to observation data discontinuity, which limits the period of observation. Under this condition, we also have to fix the ambiguity and reposition [47,53,54].
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Rao, R.; Li, C.; Huang, Y.; Zhen, X.; Wu, L. Method for structural frequency extraction from GNSS displacement monitoring signals. J. Test. Eval. 2018, 47, 2026–2043. [Google Scholar] [CrossRef]
- Liu, X.; Wang, J.; Zhen, J.; Han, H.; Hancock, C. GNSS-aided accelerometer frequency domain integration approach to monitor structural dynamic displacements. Int. J. Image Data Fusion 2021, 12, 268–281. [Google Scholar] [CrossRef]
- Artese, S.; Achilli, V.; Zinno, R. Monitoring of bridges by a laser pointer: Dynamic measurement of support rotations and elastic line displacements: Methodology and first test. Sensors 2018, 18, 338. [Google Scholar] [CrossRef] [Green Version]
- Ntotsios, E.; Papadimitriou, C.; Panetsos, P.; Karaiskos, G.; Perros, K.; Perdikaris, P.C. Bridge health monitoring system based on vibration measurements. Bull. Earthq. Eng. 2009, 7, 469–483. [Google Scholar] [CrossRef] [Green Version]
- Inaudi, D. Structural health monitoring of bridges: General issues and applications. Struct. Health Monit. Civ. Infrastruct. Syst. 2009, 339–370. [Google Scholar] [CrossRef]
- Zhou, Y.; Xiang, Z.; Zhang, X.; Wang, Y. Mechanical state inversion method for structural performance evaluation of existing suspension bridges using 3D laser scanning. Comput. Aided Civ. Infrastruct. Eng. 2022, 37, 650–665. [Google Scholar] [CrossRef]
- Xiong, C.; Niu, Y. Investigation of the dynamic behavior of a super high-rise structure using RTK-GNSS technique. KSCE J. Civ. Eng. 2019, 23, 654–665. [Google Scholar] [CrossRef]
- Barzaghi, R.; Cazzaniga, N.E.; De Gaetani, C.I.; Pinto, L.; Tornatore, V. Estimating and comparing dam deformation using classical and GNSS techniques. Sensors 2018, 18, 756. [Google Scholar] [CrossRef] [Green Version]
- Yu, J.; Meng, X.; Shao, X.; Yan, B.; Yang, L. Identification of dynamic displacements and model frequencies of a medium-span suspension bridge using multimode GNSS processing. Eng. Struct. 2014, 81, 432–443. [Google Scholar] [CrossRef]
- Roberts, G.W. Real Time On-The-Fly Kinematic GPS. Ph.D. Thesis, The University of Nottingham, Nottingham, UK, 1997. [Google Scholar]
- Roberts, G.W.; Brown, C.J.; Meng, X.; Ogundipe, O.; Atkins, C.; Colford, B. Deflection and frequency monitoring of the Forth Road Bridge, Scotland, by GPS. ICE Proceedings. Bridge Eng. 2012, 165, 105–123. [Google Scholar]
- Ashkenazi, V.; Roberts, G.W. Experimental monitoring of the Humber bridge using GPS. In Proceedings of the Institution of Civil Engineers-Civil Engineering, Thomas Telford-ICE Virtual Library, London, UK, November 1997; Volume 120, pp. 177–182. [Google Scholar]
- Brown, C.J.; Karuma, R.; Ashkenazi, V.; Roberts, G.W.; Evans, R.V. Monitoring of structures using the global positioning system. Proc. Inst. Civ. Eng. Struct. Build. 1999, 134, 97–105. [Google Scholar] [CrossRef]
- Meng, X.; Xie, Y.; Bhatia, P.; Sowter, A.; Psimoulis, P.; Colford, B.; Ye, J.; Skicko, M.; Dimauro, M.; Ge, M.; et al. Research and Development of a Pilot Project Using GNSS and Earth Observation (GeoSHM) for Structural Health Monitoring of the Forth Road Bridge in Scotland. In Proceedings of the Joint International Symposium on Deformation Monitoring, Vienna, Austria, 30 March–1 April 2016. [Google Scholar]
- Meng, X.; Nguyen, D.T.; Xie, Y.; Owen, J.S.; Psimoulis, P.; Ince, S.; Chen, Q.; Ye, J.; Bhatia, P. Design and implementation of a new system for large bridge monitoring—GeoSHM. Sensors 2018, 18, 775. [Google Scholar] [CrossRef] [Green Version]
- Meng, X.; Nguyen, D.T.; Owen, J.S.; Xie, Y.; Psimoulis, P.; Ye, G. Application of GeoSHM System in Monitoring Extreme Wind Events at the Forth Road Bridge. Remote Sens. 2019, 11, 2799. [Google Scholar] [CrossRef] [Green Version]
- Msaewe, H.A.; Psimoulis, P.A.; Hancock, C.M.; Roberts, G.W.; Bonenberg, L. Monitoring the response of Severn Suspension Bridge in the United Kingdom using multi-GNSS measurements. Struct. Control Health Monit. 2021, 28, e2830. [Google Scholar] [CrossRef]
- Xi, R.; He, Q.; Meng, X. Bridge monitoring using multi-GNSS observations with high cutoff elevations: A case study. Measurement 2021, 168, 108303. [Google Scholar] [CrossRef]
- Elnabwy, M.T.; Kaloop, M.R.; Elbeltagi, E. Talkha steel highway bridge monitoring and movement identification using RTK-GPS technique. Measurement 2013, 46, 4282–4292. [Google Scholar] [CrossRef]
- Psimoulis, P.A.; Stiros, S.C. Experimental assessment of the accuracy of GPS and RTS for the determination of the parameters of oscillation of major structures. Comput. Aided Civ. Infrastruct. Eng. 2008, 23, 389–403. [Google Scholar] [CrossRef]
- Vazquez-Ontiveros, J.R.; Vazquez-Becerra, G.E.; Quintana, J.A.; Carrion, F.J.; Guzman-Acevedo, M.; Gaxiola-Camacho, J.R. Implementation of PPP-GNSS measurement technology in the probabilistic SHM of bridge structures. Measurement 2021, 173, 108677. [Google Scholar] [CrossRef]
- Meng, X. From structural health monitoring to geo-hazard early warning: An integrated approach using GNSS positioning technology. In Earth Observation of Global Changes (EOGC); Springer: Berlin/Heidelberg, Germany, 2013; pp. 285–293. [Google Scholar]
- Moschas, F.; Stiros, S. Dynamic multipath in structural bridge monitoring: An experimental approach. GPS Solut. 2014, 18, 209–218. [Google Scholar] [CrossRef]
- Liu, S.; Li, D.; Li, B.; Wang, F. A compact high-precision GNSS antenna with a miniaturized choke ring. IEEE Antennas Wirel. Propag. Lett. 2017, 16, 2465–2468. [Google Scholar] [CrossRef]
- Janssen, V.; Rizos, C. A mixed-mode GPS network processing approach for deformation monitoring applications. Surv. Rev. 2003, 37, 2–19. [Google Scholar] [CrossRef]
- Xi, R.; Jiang, W.; Meng, X.; Chen, H.; Chen, Q. Bridge monitoring using BDS-RTK and GPS-RTK techniques. Measurement 2018, 120, 128–139. [Google Scholar] [CrossRef]
- Notti, D.; Cina, A.; Manzino, A.; Colombo, A.; Bendea, I.H.; Mollo, P.; Giordan, D. Low-cost GNSS solution for continuous monitoring of slope instabilities applied to Madonna Del Sasso Sanctuary (NW Italy). Sensors 2020, 20, 289. [Google Scholar] [CrossRef] [Green Version]
- Biagi, L.; Grec, F.; Negretti, M. Low-cost GNSS receivers for local monitoring: Experimental simulation, and analysis of displacements. Sensors 2016, 16, 2140. [Google Scholar] [CrossRef] [Green Version]
- Caldera, S.; Realini, E.; Barzaghi, R.; Reguzzoni, M.; Sansò, F. Experimental study on low-cost satellite-based geodetic monitoring over short baselines. J. Surv. Eng. 2016, 142, 04015016. [Google Scholar] [CrossRef]
- Hamza, V.; Stopar, B.; Ambrožič, T.; Turk, G.; Sterle, O. Testing Multi-Frequency Low-Cost GNSS Receivers for Geodetic Monitoring Purposes. Sensors 2020, 20, 4375. [Google Scholar] [CrossRef]
- Bai, Z.; Zhang, Q.; Huang, G.; Jin, C.; Wang, J. Real-time BeiDou Landslide Monitoring Technology of Light Terminal plus Industry Cloud. Acta Geod. Cartogr. Sin. 2019, 48, 1424–1429. [Google Scholar]
- Prochniewicz, D.; Kudrys, J.; Maciuk, K. Noises in Double-Differenced GNSS Observations. Energies 2022, 15, 1668. [Google Scholar] [CrossRef]
- Schönemann, E.; Becker, M.; Springer, T. A new approach for GNSS analysis in a multi-GNSS and multi-signal environment. J. Geod. Sci. 2011, 1, 204–214. [Google Scholar] [CrossRef] [Green Version]
- Falletti, E.; Falco, G.; Nicola, M. Performance analysis of the dispersion of double differences algorithm to detect single-source GNSS spoofing. IEEE Trans. Aerosp. Electron. Syst. 2021, 57, 2674–2688. [Google Scholar] [CrossRef]
- Tu, R.; Liu, J.; Zhang, R.; Fan, L.; Zhang, P. Real-time kinematic positioning algorithm with GNSS and high-frequency accelerometer observations for broadband signals. Meas. Sci. Technol. 2019, 31, 035007. [Google Scholar] [CrossRef]
- Manzini, N.; Orcesi, A.; Thom, C.; Brossault, M.A.; Botton, S.; Ortiz, M.; Dumoulin, J. Performance analysis of low-cost GNSS stations for structural health monitoring of civil engineering structures. Struct. Infrastruct. Eng. 2022, 18, 595–611. [Google Scholar] [CrossRef]
- Gaxiola-Camacho, J.R.; Bennett, R.; Guzman-Acevedo, G.M.; Gaxiola-Camacho, I.E. Structural evaluation of dynamic and semi-static displacements of the Juarez Bridge using GPS technology. Measurement 2017, 110, 146–153. [Google Scholar]
- Xiong, C.; Lu, H.; Zhu, J. Operational modal analysis of bridge structures with data from GNSS/accelerometer measurements. Sensors. 2017, 17, 436. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- RTKLIB: An Open Source Program Package for GNSS Positioning. Available online: https://www.rtklib.com/ (accessed on 20 July 2022).
- Teunissen, P.J.G.; De Jonge, P.J.; Tiberius, C. The least-squares ambiguity decorrelation adjustment: Its performance on short GPS baselines and short observation spans. J. Geod. 1997, 71, 589–602. [Google Scholar] [CrossRef] [Green Version]
- BeiDou Navigation Satellite System Official Document. Available online: http://en.beidou.gov.cn/SYSTEMS/Officialdocument/ (accessed on 9 October 2022).
- The 5th Edition of the Global Positioning System Standard Positioning Service Performance Standard. Available online: https://www.gps.gov/technical/ps/2020-SPS-performance-standard.pdf (accessed on 9 October 2022).
- Qu, W.; Zhu, W.; Song, S.; Ping, J. The evaluation of precision about Hopfield, Saastamoinen and EGNOS tropospheric delay correction model. Acta Astron. Sin. 2008, 49, 113–122. [Google Scholar]
- Böhm, J.; Möller, G.; Schindelegger, M.; Pain, G.; Weber, R. Development of an improved empirical model for slant delays in the troposphere (GPT2w). GPS Solut. 2015, 19, 433–441. [Google Scholar] [CrossRef] [Green Version]
- Böhm, J.; Neill, A.; Tregoning, P.; Schuh, H. Global Mapping Function (GMF): A new empirical mapping function based on numerical weather model data. Geophys. Res. Lett. 2006, 33, 7. [Google Scholar] [CrossRef] [Green Version]
- Odijk, D. Ionosphere-free phase combinations for modernized GPS. J. Surv. Eng. 2003, 129, 165–173. [Google Scholar]
- Teunissen, P.J.G. Integer aperture GNSS ambiguity resolution. Artif. Satell. 2003, 38, 79–88. [Google Scholar]
- Xi, R.; Chen, H.; Meng, X.; Jiang, W.; Chen, Q. Reliable dynamic monitoring of bridges with integrated GPS and BeiDou. J. Surv. Eng. 2018, 144, 04018008. [Google Scholar] [CrossRef]
- Shen, N.; Chen, L.; Liu, J.; Wang, L.; Tao, T.; Wu, D.; Chen, R. A review of global navigation satellite system (GNSS)-based dynamic monitoring technologies for structural health monitoring. Remote Sens. 2019, 11, 1001. [Google Scholar] [CrossRef] [Green Version]
- Stiros, S.C. GNSS (GPS) Monitoring of Dynamic Deflections of Bridges: Structural Constraints and Metrological Limitations. Infrastructures 2021, 6, 23. [Google Scholar] [CrossRef]
- Mohammadi, M.; Rashidi, M.; Mousavi, V.; Karami, A.; Yu, Y.; Samali, B. Quality evaluation of digital twins generated based on UAV photogrammetry and TLS: Bridge case study. Remote Sens. 2021, 13, 3499. [Google Scholar] [CrossRef]
- Zhao, H.; Tan, C.; Obrien, E.J.; Zhang, B.; Uddin, N.; Guo, H. Developing Digital Twins to Characterize Bridge Behavior Using Measurements Taken under Random Traffic. J. Bridge Eng. 2022, 27, 04021101. [Google Scholar] [CrossRef]
- Verhagen, S.; Teunissen, P.J.G. The ratio test for future GNSS ambiguity resolution. GPS Solut. 2013, 17, 535–548. [Google Scholar] [CrossRef]
- Li, B. Review of triple-frequency GNSS: Ambiguity resolution, benefits and challenges. J. Glob. Position. Syst. 2018, 16, 1. [Google Scholar] [CrossRef]























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Instrument | Unit Cost |
|---|---|
| low-cost receiver | $100 |
| antenna | $50 |
| Micro-pc mainboard | $200 |
| Plastic box, SIM card and 4G transmission antenna | $100 |
| Installation cost | $350 |
| Parameter | Receiver Type | |||
|---|---|---|---|---|
| Sino T30 | Trimble R12 | CHCNAV T6 Pro | Our Low-Cost GNSS | |
| Volume/cm3 | 1376 | 1511 | 1414 | 180 |
| Power/W | 2 | 4.2 | 2 | 1.8 |
| Models or Parameters | Strategies |
|---|---|
| Process Mode | DD mode with L1+L2 measurement |
| Cut-off elevation angle (°) | 15 |
| A priori tropospheric model | Saastamoinen model [43]/GPT2w [44]/GMF [45] |
| Weighting scheme | , where θ is an elevation |
| Ephemeris | broadcast ephemeris |
| Ambiguity resolution | instantaneous |
| Cycle slip detection | Ionosphere-free (IF) observations [46] |
| GNSS Solutions | BDS-only, GPS-only, multi-GNSS |
| Group | Station Name | Location | Baseline Length (m) | Receivers & Antennas | The Period for Collecting Data * | |
|---|---|---|---|---|---|---|
| 26 February | 5 April | |||||
| Base | JIZH | Stable area | − | Our Low-cost GNSS | 0:00–24:00 | 0:00–24:00 |
| Tower | QNT1 | South Tower | 300.05 | Our Low-cost GNSS | 0:00–24:00 | 0:00–24:00 |
| QBT1 | North Tower | 772.21 | Our Low-cost GNSS | 04:00–22:03 | 0:00–24:00 | |
| Cables | QXKZ | Middle Span | 469.21 | Our Low-cost GNSS | / | 0:00–24:00 |
| QDKZ | Middle Span | 490.28 | Our Low-cost GNSS | 0:00–23:22 | 0:00–24:00 | |
| Processing Parameters | Ratio of Successfully Detected Steps | |||||
|---|---|---|---|---|---|---|
| baseline | ambiguity solution | Kalman filter direction | 10 cm | 5 cm | 2 cm | 1 cm |
| 120 m | instantaneous | forward | 100% | 100% | 100% | 100% |
| Processing Parameters | Ratio of Successfully Detected Steps | |||||
|---|---|---|---|---|---|---|
| baseline | ambiguity solution | Kalman filter direction | 10 mm | 7 mm | 5 mm | 3 mm |
| 120 m | instantaneous | forward | 100% | 100% | 100% | 80% |
| Processing Parameters | Ratio of Successfully Detected Steps | ||||||
|---|---|---|---|---|---|---|---|
| baseline | ambiguity solution | Kalman filter direction | 10 cm | 5 cm | 2 cm | 1 cm | 7 mm |
| 120 m | instantaneous | forward | 100% | 100% | 100% | 100% | 70% |
| Resolution | N Direction | E Direction | U Direction | ||||||
|---|---|---|---|---|---|---|---|---|---|
| Max | Min | STD | MAX | MIN | STD | MAX | MIN | STD | |
| BDS | 5.1 | −8.1 | 2.0 | 4.1 | −9.7 | 2.7 | 18.9 | −17.6 | 6.9 |
| GPS | 10.9 | −9.3 | 3.3 | 4.8 | −12.1 | 2.9 | 18.9 | −18.0 | 7.0 |
| Multi-GNSS | 5.0 | −4.9 | 1.7 | 2.8 | −7.5 | 1.8 | 13.1 | −12.0 | 4.4 |
| Station | QNT1 | QBT1 | ||||
|---|---|---|---|---|---|---|
| N | E | U | N | E | U | |
| BDS | 237.572 | −119.196 | 139.212 | 691.940 | 438.896 | 139.143 |
| GPS | 237.574 | −119.193 | 139.215 | 619.942 | 438.893 | 139.140 |
| Multi-GNSS | 237.573 | −119.194 | 139.213 | 619.942 | 438.894 | 139.141 |
| Station | Direction | Multi-GNSS | RTS | Error |
|---|---|---|---|---|
| QNT1 | x | 0.149 | 0.145 | 0.004 |
| y | 0.024 | 0.021 | −0.003 | |
| QBT1 | x | 0.153 | 0.145 | −0.008 |
| y | 0.026 | 0.023 | −0.003 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhao, L.; Yang, Y.; Xiang, Z.; Zhang, S.; Li, X.; Wang, X.; Ma, X.; Hu, C.; Pan, J.; Zhou, Y.; et al. A Novel Low-Cost GNSS Solution for the Real-Time Deformation Monitoring of Cable Saddle Pushing: A Case Study of Guojiatuo Suspension Bridge. Remote Sens. 2022, 14, 5174. https://doi.org/10.3390/rs14205174
Zhao L, Yang Y, Xiang Z, Zhang S, Li X, Wang X, Ma X, Hu C, Pan J, Zhou Y, et al. A Novel Low-Cost GNSS Solution for the Real-Time Deformation Monitoring of Cable Saddle Pushing: A Case Study of Guojiatuo Suspension Bridge. Remote Sensing. 2022; 14(20):5174. https://doi.org/10.3390/rs14205174
Chicago/Turabian StyleZhao, Lidu, Yihui Yang, Zhongfu Xiang, Shuangcheng Zhang, Xinrui Li, Xuqiao Wang, Xiaping Ma, Chuan Hu, Jianping Pan, Yin Zhou, and et al. 2022. "A Novel Low-Cost GNSS Solution for the Real-Time Deformation Monitoring of Cable Saddle Pushing: A Case Study of Guojiatuo Suspension Bridge" Remote Sensing 14, no. 20: 5174. https://doi.org/10.3390/rs14205174
APA StyleZhao, L., Yang, Y., Xiang, Z., Zhang, S., Li, X., Wang, X., Ma, X., Hu, C., Pan, J., Zhou, Y., & Chen, M. (2022). A Novel Low-Cost GNSS Solution for the Real-Time Deformation Monitoring of Cable Saddle Pushing: A Case Study of Guojiatuo Suspension Bridge. Remote Sensing, 14(20), 5174. https://doi.org/10.3390/rs14205174