
Analysis of Precise Orbit Determination of BDS-3 MEO and IGSO Satellites Based on Several Dual-Frequency Measurement Combinations



Abstract
:
1. Introduction
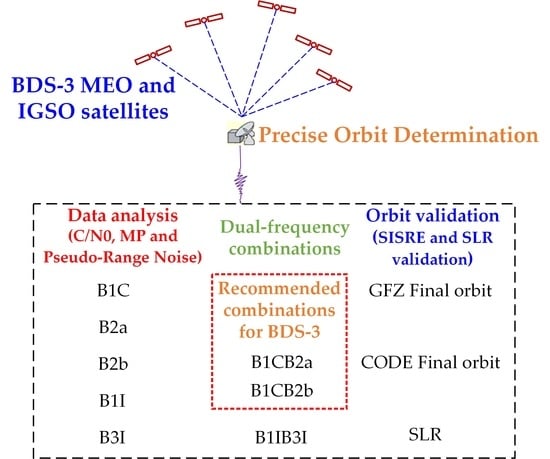
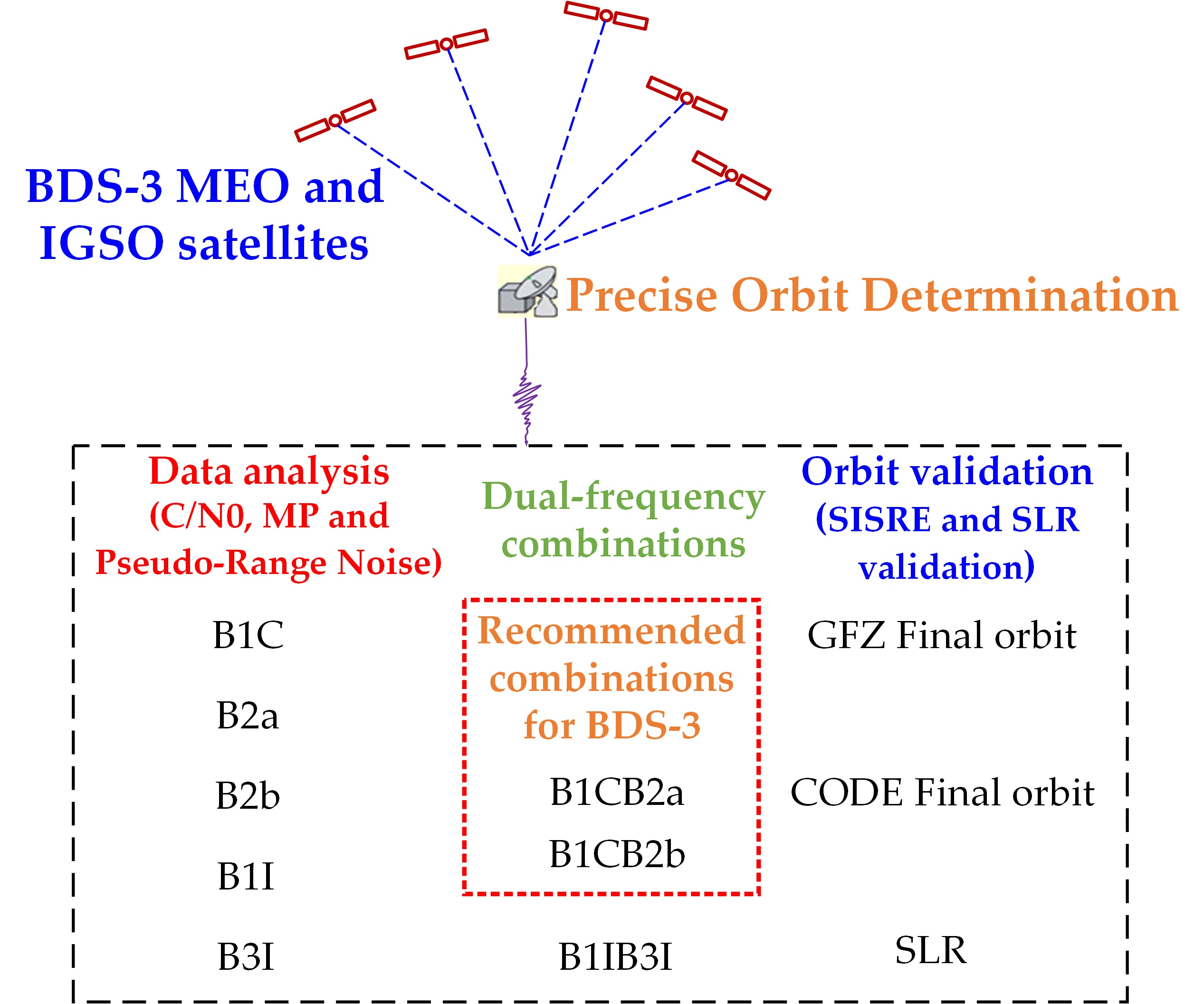
2. Methods
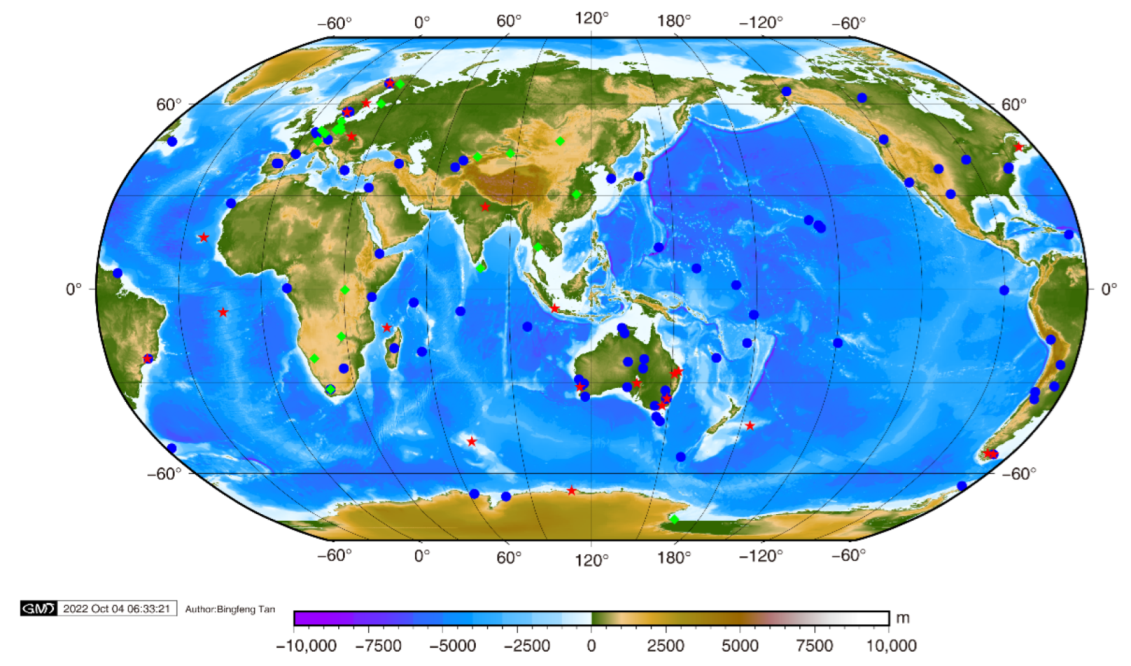
2.1. MGEX Tracking Network
2.2. Tracking Data Analysis Algorithm
- (1)
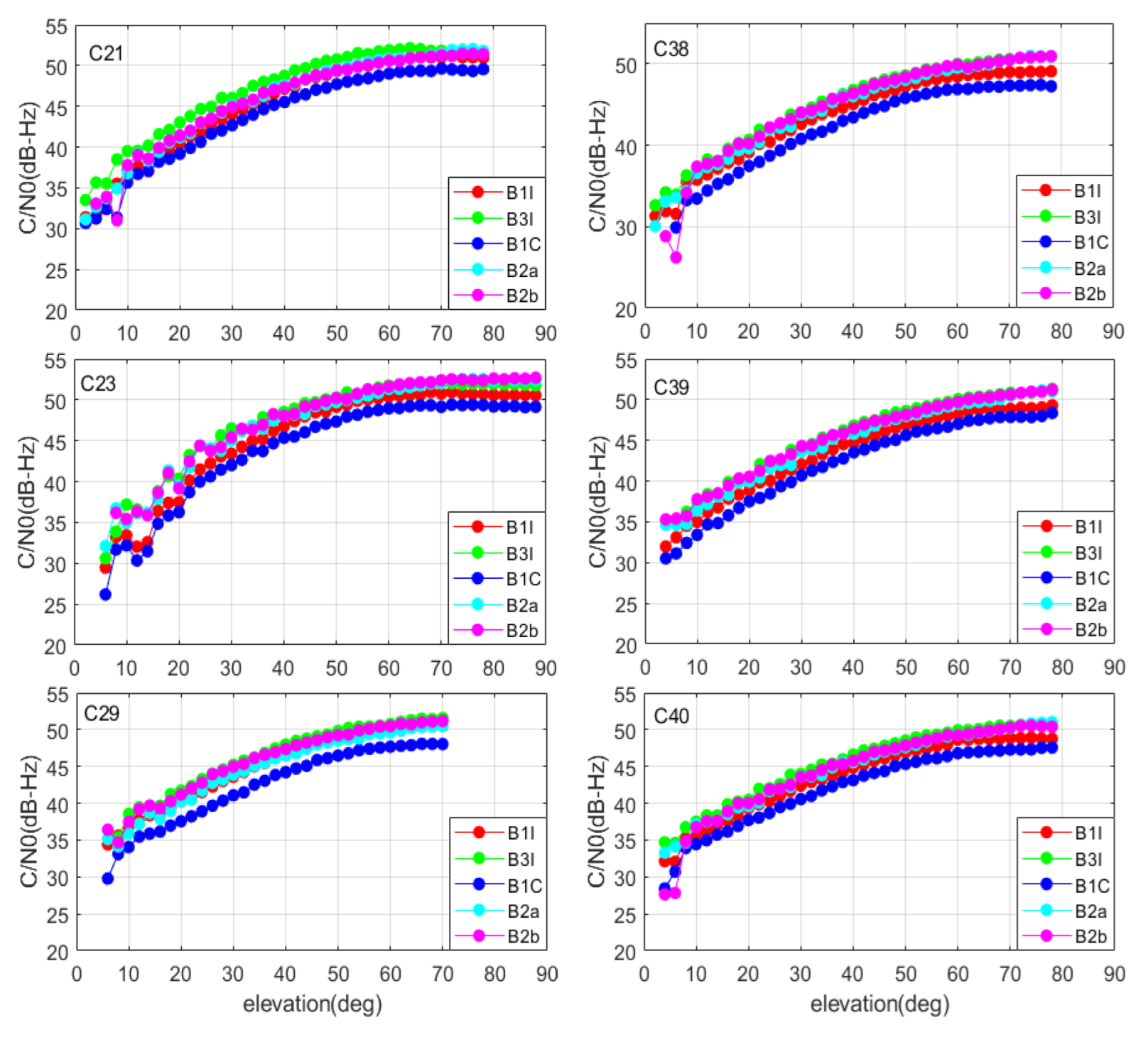
- C/N0 analysis
- (2)
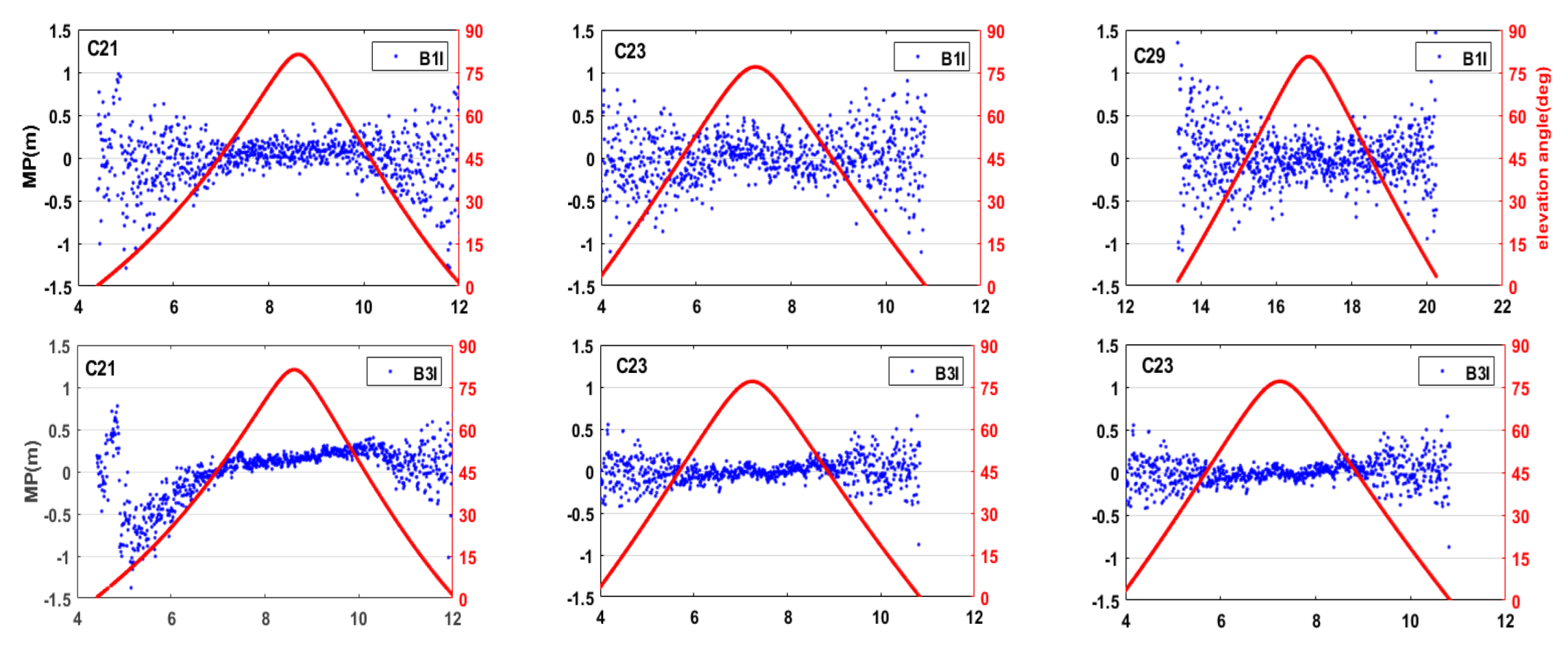
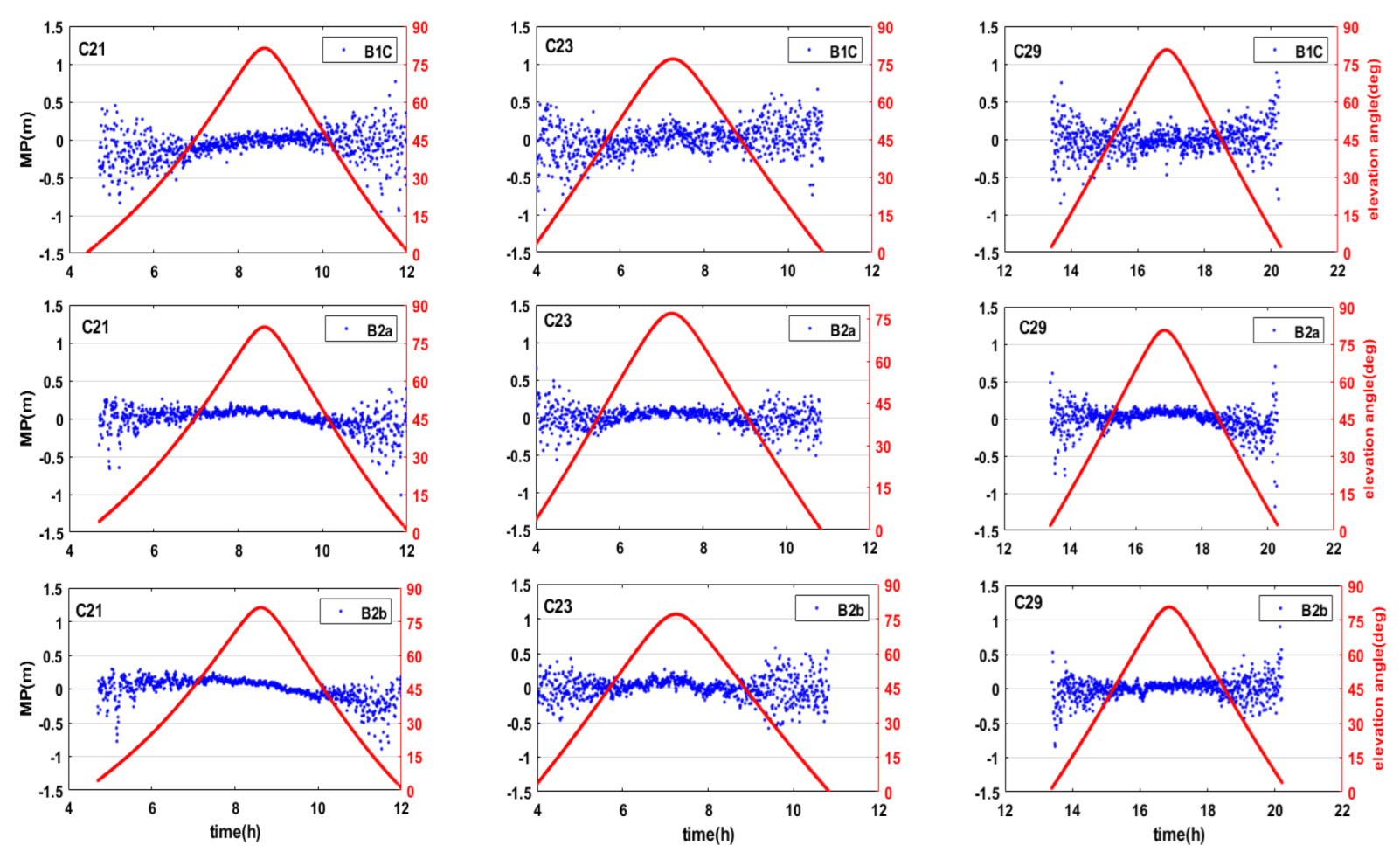
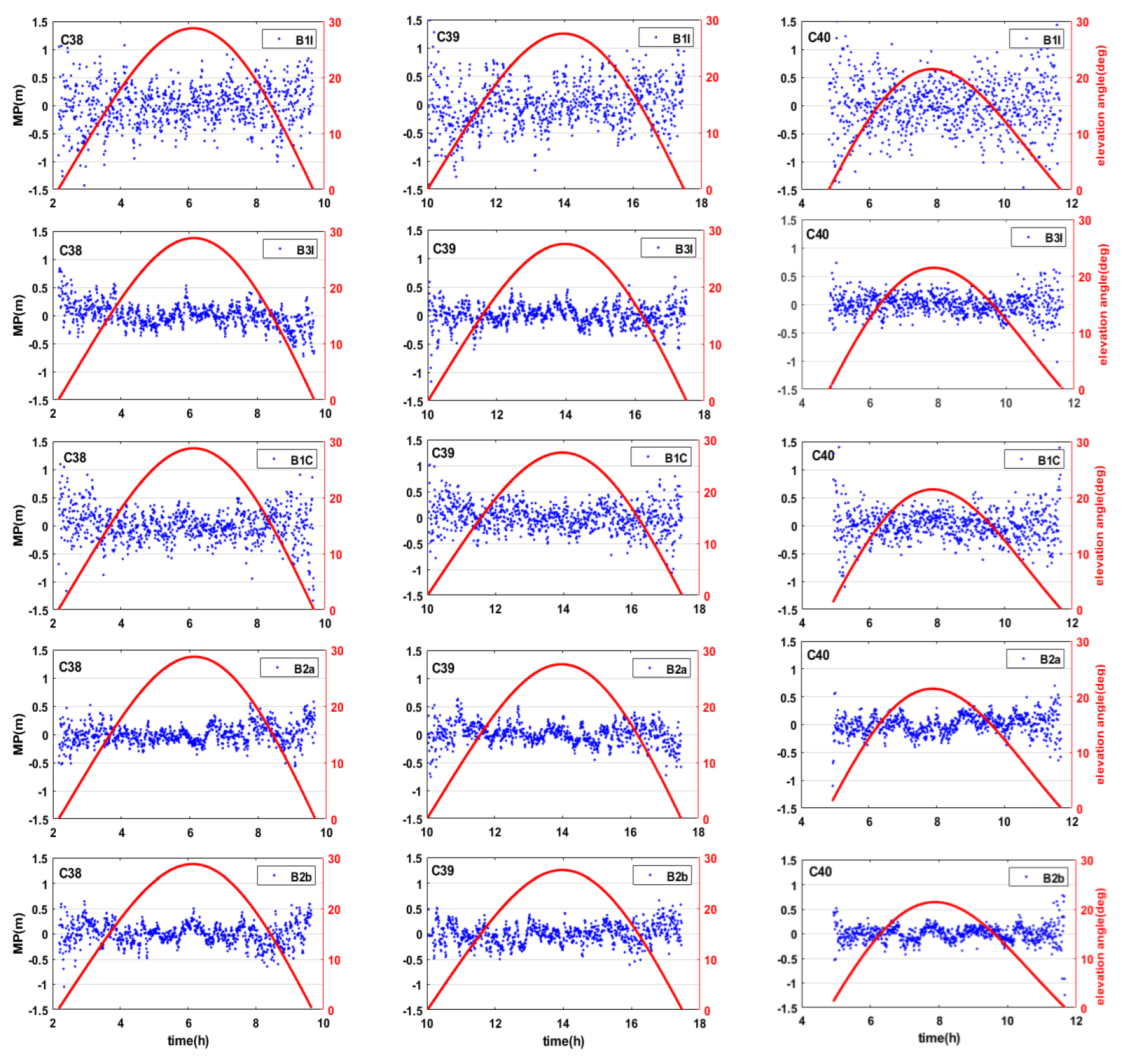
- Pseudo-range MP analysis
- (3)
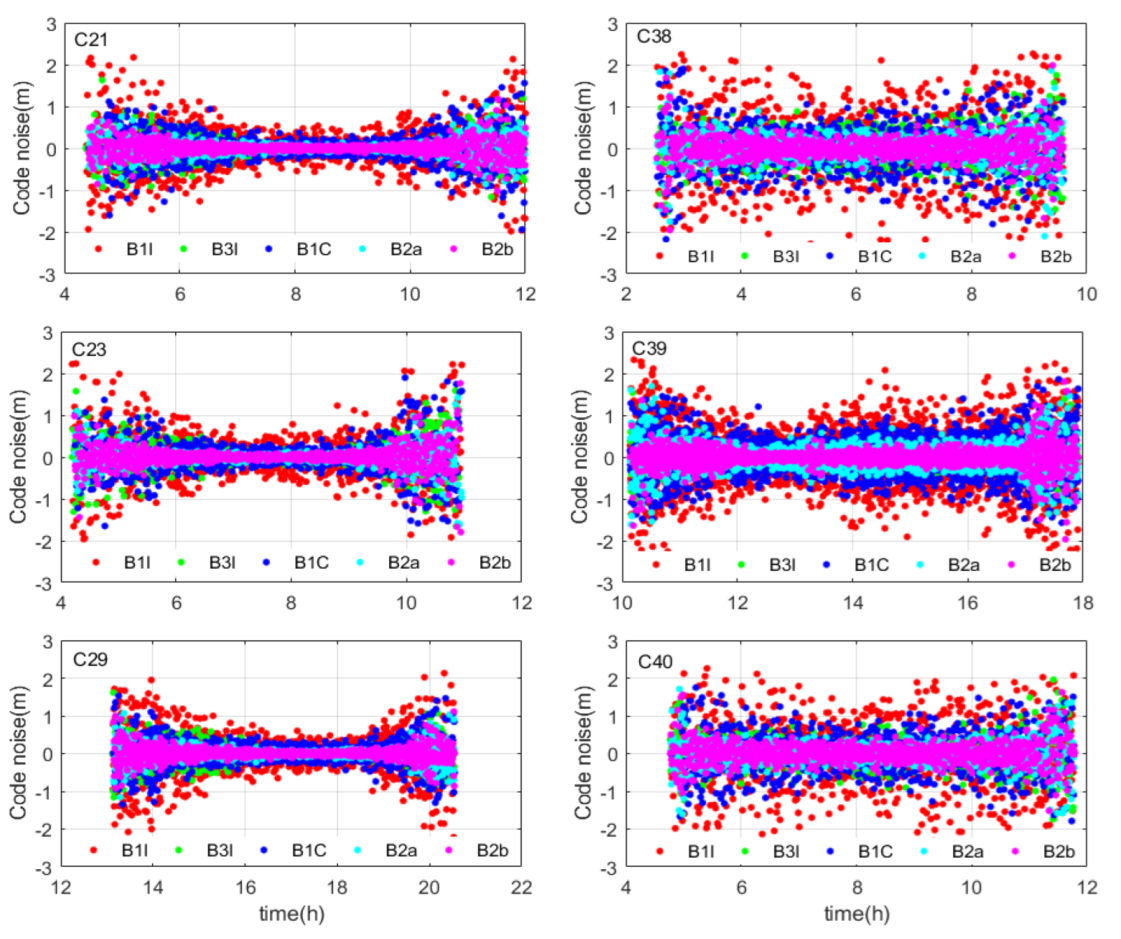
- Pseudo-range noise analysis
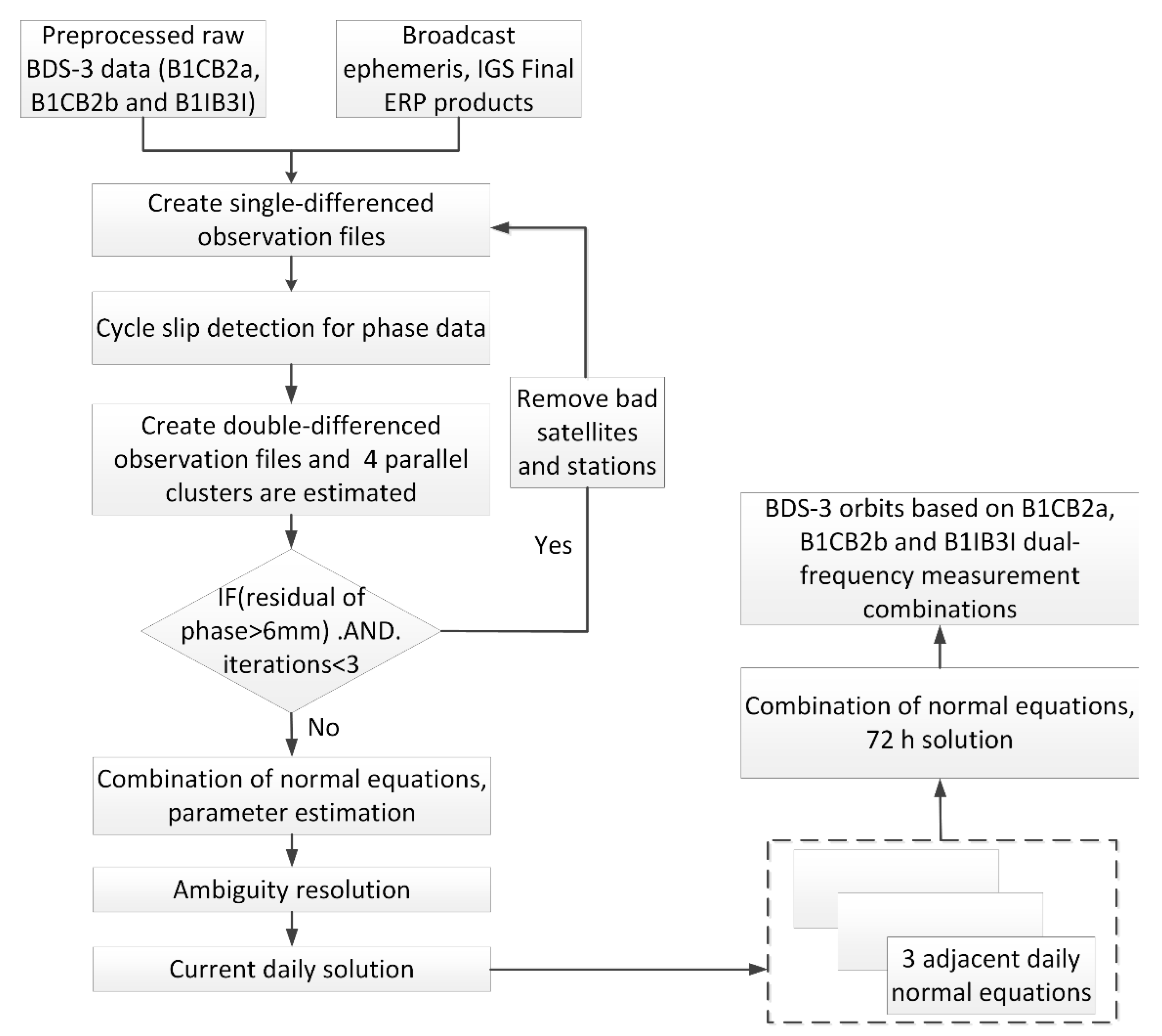
2.3. POD Strategy of BDS-3 Satellite Based on Several Dual-Frequency Measurement Combinations
3. Results
3.1. Tracking Data Analysis
- (1)
- C/N0 analysis
- (2)
- Pseudo-range MP analysis
- (3)
- Pseudo-range noise analysis
3.2. Orbit Quality
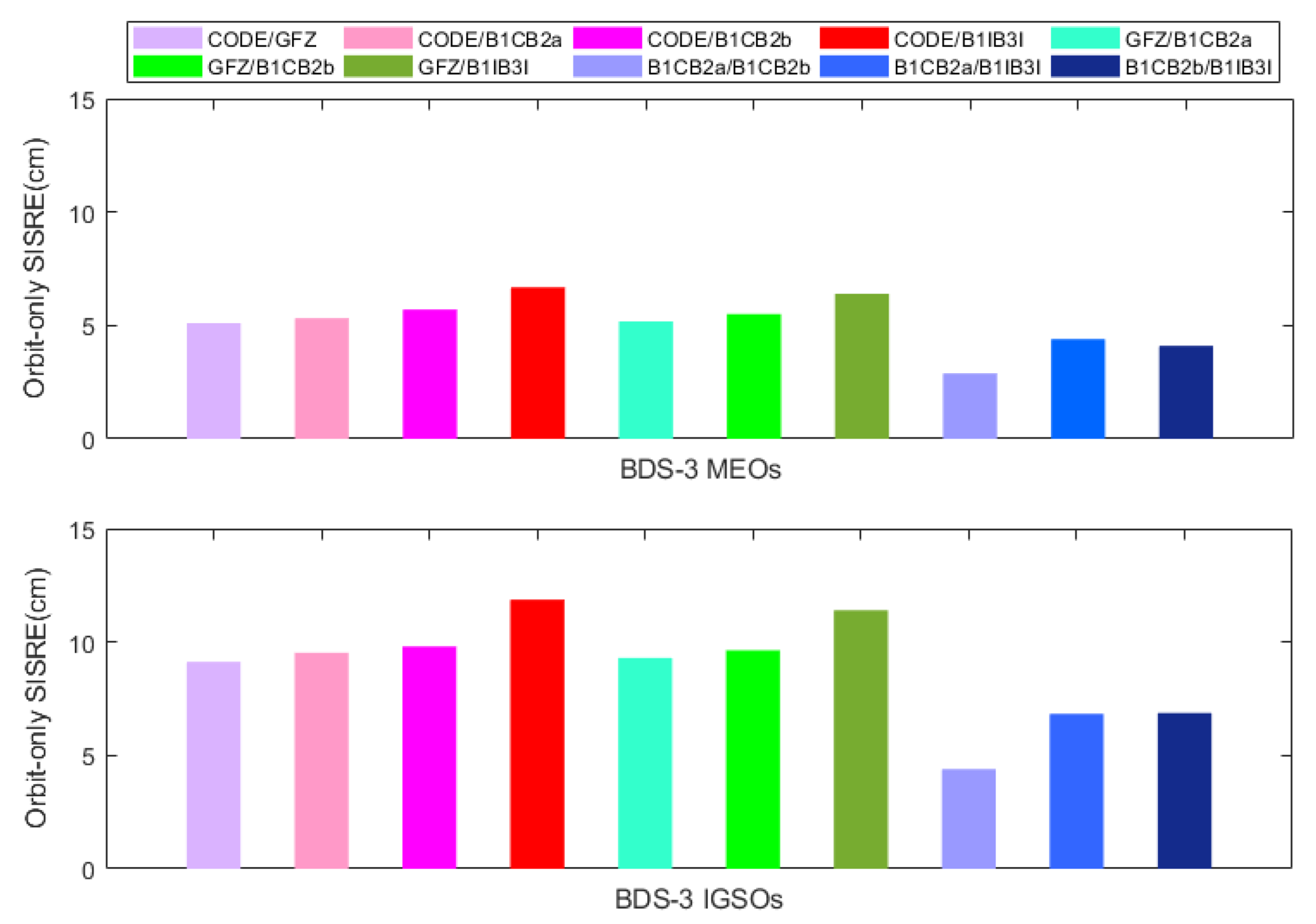
3.2.1. Orbit-Only SISRE
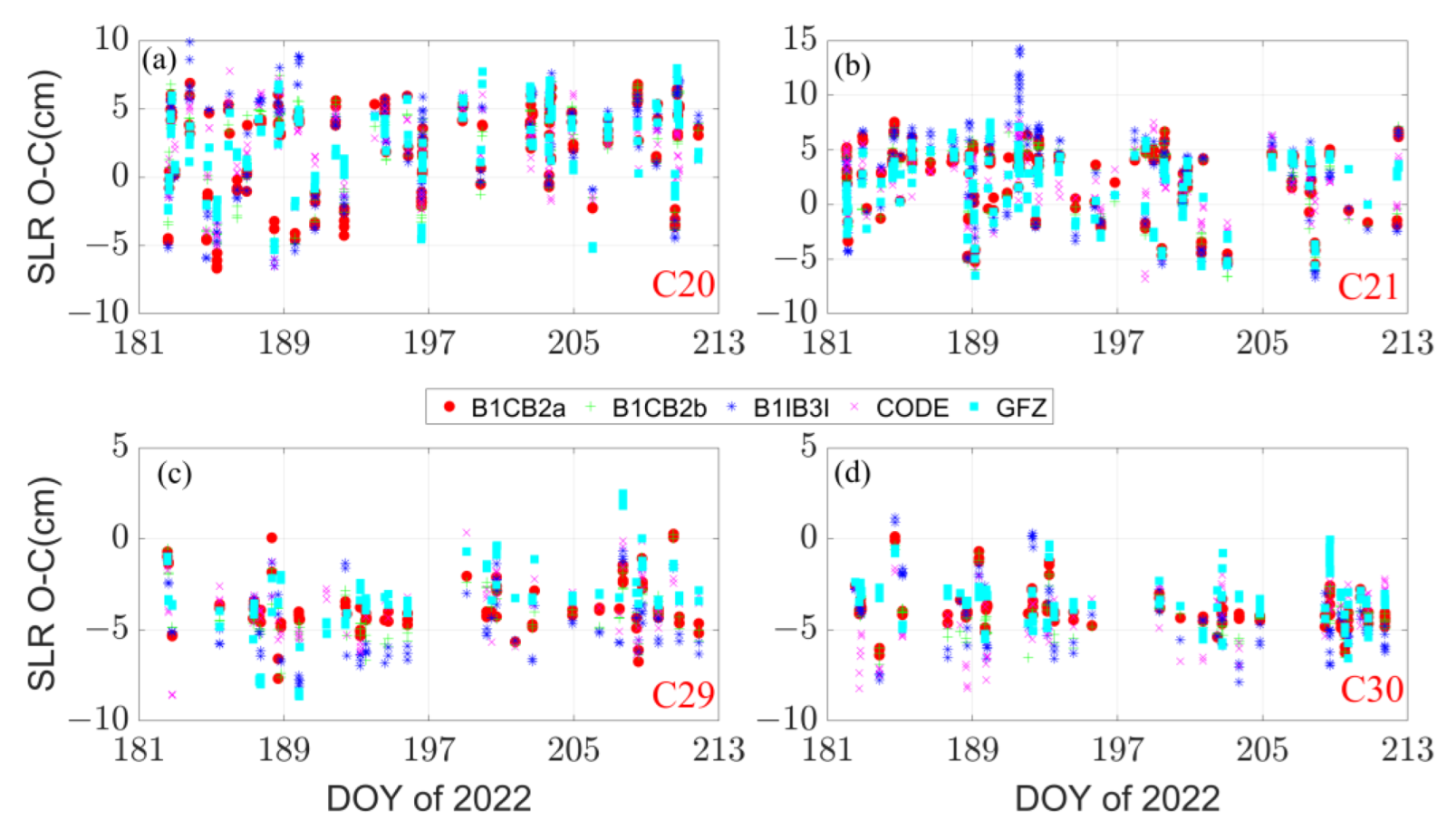
3.2.2. SLR Residuals
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Yang, Y.; Gao, W.; Guo, S.; Mao, Y.; Yang, Y. Introduction to BeiDou-3 navigation satellite system. Navigation 2019, 66, 7–18. [Google Scholar] [CrossRef] [Green Version]
- Yang, Y.; Mao, Y.; Sun, B. Basic performance and future developments of BeiDou global navigation satellite system. Satell. Navig. 2020, 1, 1. [Google Scholar] [CrossRef] [Green Version]
- Yang, Y.; Xu, Y.; Li, J.; Yang, C. Progress and performance evaluation of BeiDou global navigation satellite system: Data analysis based on BDS-3 demonstration system. Sci. China Earth Sci. 2018, 61, 614–624. [Google Scholar] [CrossRef]
- Lu, M.; Li, W.; Yao, Z.; Cui, X. Overview of BDS III new signals. Navigation 2019, 66, 19–35. [Google Scholar] [CrossRef] [Green Version]
- Yan, X.; Huang, G.; Zhang, Q.; Liu, C.; Wang, L.; Qin, Z. Early analysis of precise orbit and clock offset determination for the satellites of the global BeiDou-3 system. Adv. Space Res. 2019, 63, 1270–1279. [Google Scholar] [CrossRef]
- Zhang, B.; Jia, X.; Sun, F.; Xiao, K.; Dai, H. Performance of BeiDou-3 satellites: Signal quality analysis and precise orbit determination. Adv. Space Res. 2019, 64, 687–695. [Google Scholar] [CrossRef]
- Li, R.; Wang, N.; Li, Z.; Zhang, Y.; Wang, Z.; Ma, H. Precise orbit determination of BDS-3 satellites using B1C and B2a dual-frequency measurements. GPS Solut. 2021, 25, 95. [Google Scholar] [CrossRef]
- Montenbruck, O.; Steigenberger, P.; Prange, L.; Deng, Z.; Zhao, Q.; Perosanz, F.; Romero, I.; Noll, C.; Stürze, A.; Weber, G. The Multi-GNSS Experiment (MGEX) of the International GNSS Service (IGS)–achievements, prospects and challenges. Adv. Space Res. 2017, 59, 1671–1697. [Google Scholar] [CrossRef]
- Tan, B.; Yuan, Y.; Wen, M.; Ning, Y.; Liu, X. Initial results of the precise orbit determination for the new-generation BeiDou satellites (BeiDou-3) based on the iGMAS network. ISPRS Int. J. Geo-Inf. 2016, 5, 196. [Google Scholar] [CrossRef] [Green Version]
- Xu, X.; Wang, X.; Liu, J.; Zhao, Q. Characteristics of BD3 global service satellites: POD, open service signal and atomic clock performance. Remote Sens. 2019, 11, 1559. [Google Scholar] [CrossRef]
- Cinelli, M.; Ortore, E.; Laneve, G.; Circi, C. Geometrical approach for an optimal inter-satellite visibility. Astrodynamics 2021, 5, 237–248. [Google Scholar] [CrossRef]
- Kai, X.; Chunling, W.; Liangdong, L. Autonomous navigation for a group of satellites with star sensors and inter-satellite links. Acta Astronaut. 2013, 86, 10–23. [Google Scholar] [CrossRef]
- Wang, C.; Zhao, Q.; Guo, J.; Liu, J.; Chen, G. The contribution of intersatellite links to BDS-3 orbit determination: Model refinement and comparisons. Navigation 2019, 66, 71–82. [Google Scholar] [CrossRef] [Green Version]
- Xie, X.; Geng, T.; Zhao, Q.; Lv, Y.; Cai, H.; Liu, J. Orbit and clock analysis of BDS-3 satellites using inter-satellite link observations. J. Geod. 2020, 94, 64. [Google Scholar] [CrossRef]
- Yu, F.; He, Z.; Xu, N. Autonomous navigation for GPS using inter-satellite ranging and relative direction measurements. Acta Astronaut. 2019, 160, 646–655. [Google Scholar] [CrossRef]
- Deng, Z.; Nischan, T.; Bradke, M. Multi-GNSS Rapid Orbit-, Clock- & EOP-Product Series; GFZ Data Services: Potsdam, Germany, 2017. [Google Scholar]
- Guo, J.; Xu, X.; Zhao, Q.; Liu, J. Precise orbit determination for quad-constellation satellites at Wuhan University: Strategy, result validation, and comparison. J. Geod. 2016, 90, 143–159. [Google Scholar] [CrossRef]
- Prange, L.; Villiger, A.; Sidorov, D.; Schaer, S.; Beutler, G.; Dach, R.; Jäggi, A. Overview of CODE’s MGEX solution with the focus on Galileo. Adv. Space Res. 2020, 66, 2786–2798. [Google Scholar] [CrossRef]
- Zhao, Q.; Guo, J.; Wang, C.; Lyu, Y.; Xu, X.; Yang, C.; Li, J. Precise orbit determination for BDS satellites. Satell. Navig. 2022, 3, 2. [Google Scholar] [CrossRef]
- Zhou, W.; Cai, H.; Chen, G.; Jiao, W.; He, Q.; Yang, Y. Multi-GNSS Combined Orbit and Clock Solutions at iGMAS. Sensors 2022, 22, 457. [Google Scholar] [CrossRef]
- Steigenberger, P.; Deng, Z.; Guo, J.; Prange, L.; Song, S.; Montenbruck, O. BeiDou-3 orbit and clock quality of the IGS Multi-GNSS Pilot Project. Adv. Space Res. 2022, in press. [Google Scholar] [CrossRef]
- Xie, X.; Geng, T.; Zhao, Q.; Liu, J.; Wang, B. Performance of BDS-3: Measurement quality analysis, precise orbit and clock determination. Sensors 2017, 17, 1233. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Zhang, X.; Wu, M.; Liu, W.; Li, X.; Yu, S.; Lu, C.; Wickert, J. Initial assessment of the COMPASS/BeiDou-3: New-generation navigation signals. J. Geod. 2017, 91, 1225–1240. [Google Scholar] [CrossRef]
- Tan, B.; Yuan, Y.; Ai, Q.; Zha, J. Real-Time Multi-GNSS Precise Orbit Determination Based on the Hourly Updated Ultra-Rapid Orbit Prediction Method. Remote Sens. 2022, 14, 4412. [Google Scholar] [CrossRef]
- Ai, Q.; Yuan, Y.; Zhang, B.; Xu, T.; Chen, Y. Refining GPS/GLONASS Satellite Clock Offset Estimation in the Presence of Pseudo-Range Inter-Channel Biases. Remote Sens. 2020, 12, 1821. [Google Scholar] [CrossRef]
- Ai, Q.; Zhang, B.; Yuan, Y.; Xu, T.; Chen, Y.; Tan, B. Evaluation and mitigation of the influence of pseudorange biases on GNSS satellite clock offset estimation. Measurement 2022, 193, 111015. [Google Scholar] [CrossRef]
- Cao, Y.; Huang, G.; Xie, W.; Xie, S.; Wang, H. Assessment and comparison of satellite clock offset between BeiDou-3 and other GNSSs. Acta Geod. Geophys. 2021, 56, 303–319. [Google Scholar] [CrossRef]
- Li, X.; Hu, X.; Guo, R.; Tang, C.; Zhou, S.; Liu, S.; Chen, J. Orbit and positioning accuracy for new generation BeiDou satellites during the earth eclipsing period. J. Navig. 2018, 71, 1069–1087. [Google Scholar] [CrossRef]
- Li, X.; Yuan, Y.; Zhu, Y.; Jiao, W.; Bian, L.; Li, X.; Zhang, K. Improving BDS-3 precise orbit determination for medium earth orbit satellites. GPS Solut. 2020, 24, 53. [Google Scholar] [CrossRef]
- Lin, X.; Baojun, L.; Yingchun, L.; Sujie, X.; Tao, B. Satellite geometry and attitude mode of BDS-3 MEO satellites developed by SECM. In Proceedings of the 31st International Technical Meeting of the Satellite Division of the Institute of Navigation (ION GNSS+ 2018), Miami, FL, USA, 24–28 September 2018; pp. 1268–1289. [Google Scholar]
- Wanninger, L.; Beer, S. BeiDou satellite-induced code pseudorange variations: Diagnosis and therapy. GPS Solut. 2015, 19, 639–648. [Google Scholar] [CrossRef] [Green Version]
- Noll, C.E. The crustal dynamics data information system: A resource to support scientific analysis using space geodesy. Adv. Space Res. 2010, 45, 1421–1440. [Google Scholar] [CrossRef]
- Liu, T.; Zhang, B.; Yuan, Y.; Li, M. Real-Time Precise Point Positioning (RTPPP) with raw observations and its application in real-time regional ionospheric VTEC modeling. J. Geod. 2018, 92, 1267–1283. [Google Scholar] [CrossRef]
- Zha, J.; Zhang, B.; Liu, T.; Hou, P. Ionosphere-weighted undifferenced and uncombined PPP-RTK: Theoretical models and experimental results. GPS Solut. 2021, 25, 135. [Google Scholar] [CrossRef]
- Zhang, B.; Chen, Y.; Yuan, Y. PPP-RTK based on undifferenced and uncombined observations: Theoretical and practical aspects. J. Geod. 2019, 93, 1011–1024. [Google Scholar] [CrossRef]
- Zhang, B.; Teunissen, P.J. Characterization of multi-GNSS between-receiver differential code biases using zero and short baselines. Sci. Bull. 2015, 60, 1840–1849. [Google Scholar] [CrossRef] [Green Version]
- Zhang, B.; Teunissen, P.J.; Odijk, D. A novel un-differenced PPP-RTK concept. J. Navig. 2011, 64, S180–S191. [Google Scholar] [CrossRef] [Green Version]
- Guo, F.; Li, X.; Liu, W. Mitigating BeiDou satellite-induced code bias: Taking into account the stochastic model of corrections. Sensors 2016, 16, 909. [Google Scholar] [CrossRef] [Green Version]
- Montenbruck, O.; Schmid, R.; Mercier, F.; Steigenberger, P.; Noll, C.; Fatkulin, R.; Kogure, S.; Ganeshan, A.S. GNSS satellite geometry and attitude models. Adv. Space Res. 2015, 56, 1015–1029. [Google Scholar] [CrossRef] [Green Version]
- Petit, G.; Luzum, B. IERS Conventions; Verlag des Bundesamts für Kartographie und Geodäsie: Frankfurt am Main, Germany, 2010; ISBN 3-89888-989-6. [Google Scholar]
- Arnold, D.; Meindl, M.; Beutler, G.; Dach, R.; Schaer, S.; Lutz, S.; Prange, L.; Sośnica, K.; Mervart, L.; Jäggi, A. CODE’s new solar radiation pressure model for GNSS orbit determination. J. Geod. 2015, 89, 775–791. [Google Scholar] [CrossRef] [Green Version]
- Montenbruck, O.; Steigenberger, P.; Hauschild, A. Multi-GNSS signal-in-space range error assessment—Methodology and results. Adv. Space Res. 2018, 61, 3020–3038. [Google Scholar] [CrossRef]
- Steigenberger, P.; Montenbruck, O. Consistency of MGEX orbit and clock products. Engineering 2020, 6, 898–903. [Google Scholar] [CrossRef]
- Pearlman, M.R.; Degnan, J.J.; Bosworth, J.M. The international laser ranging service. Adv. Space Res. 2002, 30, 135–143. [Google Scholar] [CrossRef]
- CSNO. Definitions and Descriptions of BDS/GNSS Satellite Parameters for High Precision Applications; China Satellite Navigation Office: Beijing, China, 2019. Available online: http://www.beidou.gov.cn/yw/gfgg/201911/W020191126317485269344.pdf (accessed on 12 October 2022). (In Chinese)










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Satellite | PRN | SVN | Type | Manufacture | Launch Date |
|---|---|---|---|---|---|
| BDS3-M01 | C19 | C201 | MEO | CAST | 5 November 2017 |
| BDS3-M02 | C20 | C202 | MEO | CAST | 5 November 2017 |
| BDS3-M03 | C27 | C203 | MEO | SECM | 1 January 2018 |
| BDS3-M04 | C28 | C204 | MEO | SECM | 11 January 2018 |
| BDS3-M05 | C22 | C205 | MEO | CAST | 12 February 2018 |
| BDS3-M06 | C21 | C206 | MEO | CAST | 12 February 2018 |
| BDS3-M07 | C29 | C207 | MEO | SECM | 29 March 2018 |
| BDS3-M08 | C30 | C208 | MEO | SECM | 29 March 2018 |
| BDS3-M09 | C23 | C209 | MEO | CAST | 29 July 2018 |
| BDS3-M10 | C24 | C210 | MEO | CAST | 29 July 2018 |
| BDS3-M11 | C26 | C211 | MEO | SECM | 24 August 2018 |
| BDS3-M12 | C25 | C212 | MEO | SECM | 24 August 2018 |
| BDS3-M13 | C32 | C213 | MEO | CAST | 19 September 2018 |
| BDS3-M14 | C33 | C214 | MEO | CAST | 19 September 2018 |
| BDS3-M15 | C34 | C215 | MEO | SECM | 15 October 2018 |
| BDS3-M16 | C35 | C216 | MEO | SECM | 15 October 2018 |
| BDS3-M17 | C36 | C218 | MEO | CAST | 18 November 2018 |
| BDS3-M18 | C37 | C219 | MEO | CAST | 18 November 2018 |
| BDS3-M19 | C41 | C227 | MEO | CAST | 16 December 2019 |
| BDS3-M20 | C42 | C228 | MEO | CAST | 16 December 2019 |
| BDS3-M21 | C43 | C226 | MEO | SECM | 23 November 2019 |
| BDS3-M22 | C44 | C225 | MEO | SECM | 23 November 2019 |
| BDS3-M23 | C45 | C222 | MEO | CAST | 22 September 2019 |
| BDS3-M24 | C46 | C223 | MEO | CAST | 22 September 2019 |
| BDS3-I01 | C38 | C220 | IGSO | CAST | 20 April 2019 |
| BDS3-I02 | C39 | C221 | IGSO | CAST | 24 June 2019 |
| BDS3-I03 | C40 | C224 | IGSO | CAST | 4 November 2019 |
| BDS3-G01 | C59 | C217 | GEO | CAST | 1 November 2018 |
| BDS3-G02 | C60 | C229 | GEO | CAST | 9 March 2020 |
| BDS3-G03 | C61 | C230 | GEO | CAST | 2 June 2020 |
| GFZ Solution | CODE Solution | B1CB2a, B1CB2b and B1IB3I Combinations | |
|---|---|---|---|
| Platform | EPOS | Bernese GNSS Software version 5.3 | Modified Bernese GNSS Software version 5.2 |
| Stations used for satellite POD | 160 stations | 140 stations, with 90 stations supporting BDS-3 | 129 stations, all supporting BDS-3 |
| Signals used for BDS-3 POD | B1IB3I | B1IB3I | B1CB2a, B1CB2b and B1IB3I |
| Data differencing strategy | Undifferenced | Double differenced | Double differenced |
| Data coverage | 24 h arc | 72 h arc | 72 h arc |
| Sampling rate | 300 s | 180 s | 180 s |
| Elevation angle cut-off | 7° | 3° | 3° |
| Weighting | Elevation-dependent weighting | Elevation-dependent weighting | Elevation-dependent weighting, and 6 mm threshold value for carrier phase residuals |
| A prior orbits | Rapid products | Rapid products | Based on broadcast ephemeris |
| Satellite and receiver antenna PCO/PCV | igs14.atx for both satellite and receiver antennas | CSNO value for satellite antennas, and igsR3.atx for receiver antennas | igs14_2218.atx for satellite antennas. For receiver antennas, GPS L1/L2 values adopted for all dual-frequency measurement combinations of BDS-3 [39] |
| Antenna thrust for CAST MEO, SECM MEO and CAST IGSO | 310 W/280 W/100 W | 310 W/280 W/0 W | Not applied |
| Earth albedo | Not applied | Not applied | Not applied |
| Troposphere | 1 h random-walk for zenith delay and 2 h random-walk for gradients | 2 h piece-wise linear for zenith delay and 24 h piece-wise linear for gradients | 2 h piece-wise linear for zenith delay and 24 h piece-wise linear for gradients |
| Ambiguities | Fixed | Fixed | Fixed |
| Pseudo-stochastic orbit parameters | At noon in radial, along-track and cross-track direction | 12 h in radial, along-track and cross-track direction | Every 12 h, with the constraint of 1 × 10−6 m/s, 1 × 10−5 m/s and 1 × 10−8 m/s in the radial, along-track and cross-track direction, respectively |
| Precession and nutation | IAU 2000 | IAU 2000 and IAU 2000R06 | IAU 2000 |
| Geopotential | EGM2008 | EGM2008 12 × 12 | EGM2008 12 × 12 |
| Solid Earth tides, ocean tides and solid Earth pole tides | IERS Conventions 2010 | IERS Conventions 2010 | IERS Conventions 2010 [40] |
| N body gravitation | DE421 ephemeris from JPL | DE421 ephemeris from JPL | DE405 ephemeris from JPL |
| A prior Solar Radiation Pressure (SRP) model | None | None | None |
| SRP model | Empirical CODE Orbit Model, ECOM (D0, Y0, B0, BC, BS) | The new extended ECOM, ECOM-2 (D0, Y0, B0, BC, BS, D2C, D2S) | The new extended ECOM, ECOM-2 (D0, Y0, B0, BC, BS, D2C, D2S) [41] |
| Type/Frequency | IGSOs | MEOs | ||||
|---|---|---|---|---|---|---|
| C/N0 (dB-Hz) | MP (m) | Pseudo-Range Noise (m) | C/N0 (dB-Hz) | MP (m) | Pseudo-Range Noise (m) | |
| B1I | 45.18 | 0.48 | 0.40 | 47.28 | 0.40 | 0.33 |
| B3I | 47.23 | 0.29 | 0.23 | 48.78 | 0.23 | 0.20 |
| B1C | 43.88 | 0.32 | 0.30 | 45.84 | 0.26 | 0.24 |
| B2a | 45.27 | 0.26 | 0.21 | 47.49 | 0.23 | 0.18 |
| B2b | 45.93 | 0.24 | 0.22 | 47.97 | 0.22 | 0.18 |
| Combination1/AC1 | Combination2/AC2 | Orbit-Only SISRE (cm) | |
|---|---|---|---|
| MEOs | IGSOs | ||
| CODE | GFZ | 5.10 | 9.13 |
| CODE | B1CB2a | 5.32 | 9.53 |
| CODE | B1CB2b | 5.70 | 9.80 |
| CODE | B1IB3I | 6.68 | 11.87 |
| GFZ | B1CB2a | 5.18 | 9.30 |
| GFZ | B1CB2b | 5.50 | 9.63 |
| GFZ | B1IB3I | 6.40 | 11.40 |
| B1CB2a | B1CB2b | 2.88 | 4.40 |
| B1CB2a | B1IB3I | 4.40 | 6.83 |
| B1CB2b | B1IB3I | 4.10 | 6.87 |
| PRN of BDS-3 | Solutions | Mean Value (cm) | Mean RMS (cm) |
|---|---|---|---|
| C20, M2 (CAST) | CODE | 2.24 | 3.50 |
| GFZ | 2.55 | 3.90 | |
| B1CB2a | 2.34 | 4.13 | |
| B1CB2b | 2.54 | 4.20 | |
| B1IB3I | 2.94 | 4.83 | |
| C21, M3 (CAST) | CODE | 2.27 | 3.58 |
| GFZ | 1.82 | 3.54 | |
| B1CB2a | 2.44 | 4.02 | |
| B1CB2b | 2.47 | 4.12 | |
| B1IB3I | 3.01 | 5.25 | |
| C29, M9 (SECM) | CODE | −3.68 | 4.03 |
| GFZ | −3.19 | 3.87 | |
| B1CB2a | −3.74 | 4.01 | |
| B1CB2b | −4.07 | 4.35 | |
| B1IB3I | −4.64 | 5.03 | |
| C30, M10 (SECM) | CODE | −4.37 | 4.68 |
| GFZ | −3.36 | 3.61 | |
| B1CB2a | −3.89 | 4.05 | |
| B1CB2b | −4.26 | 4.43 | |
| B1IB3I | −4.48 | 4.86 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tan, B.; Ai, Q.; Yuan, Y. Analysis of Precise Orbit Determination of BDS-3 MEO and IGSO Satellites Based on Several Dual-Frequency Measurement Combinations. Remote Sens. 2022, 14, 6030. https://doi.org/10.3390/rs14236030
Tan B, Ai Q, Yuan Y. Analysis of Precise Orbit Determination of BDS-3 MEO and IGSO Satellites Based on Several Dual-Frequency Measurement Combinations. Remote Sensing. 2022; 14(23):6030. https://doi.org/10.3390/rs14236030
Chicago/Turabian StyleTan, Bingfeng, Qingsong Ai, and Yunbin Yuan. 2022. "Analysis of Precise Orbit Determination of BDS-3 MEO and IGSO Satellites Based on Several Dual-Frequency Measurement Combinations" Remote Sensing 14, no. 23: 6030. https://doi.org/10.3390/rs14236030
APA StyleTan, B., Ai, Q., & Yuan, Y. (2022). Analysis of Precise Orbit Determination of BDS-3 MEO and IGSO Satellites Based on Several Dual-Frequency Measurement Combinations. Remote Sensing, 14(23), 6030. https://doi.org/10.3390/rs14236030