
Airborne Kite Tether Force Estimation and Experimental Validation Using Analytical and Machine Learning Models for Coastal Regions



Abstract
:
1. Introduction
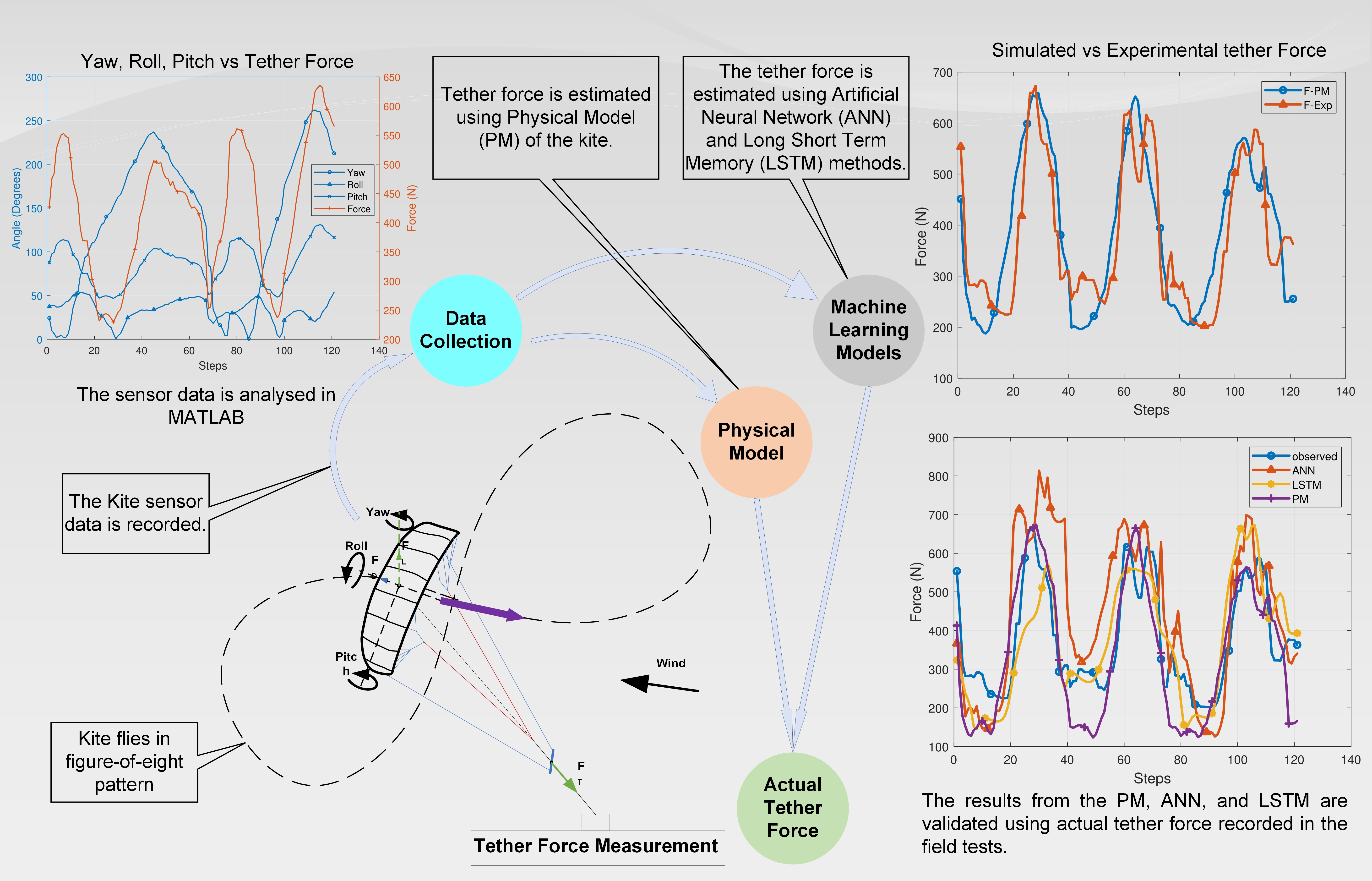
- The proposed approach is based on field data collection, processing, and analysis. The field tests are conducted under steady and turbulent wind conditions, which is explained rigorously.
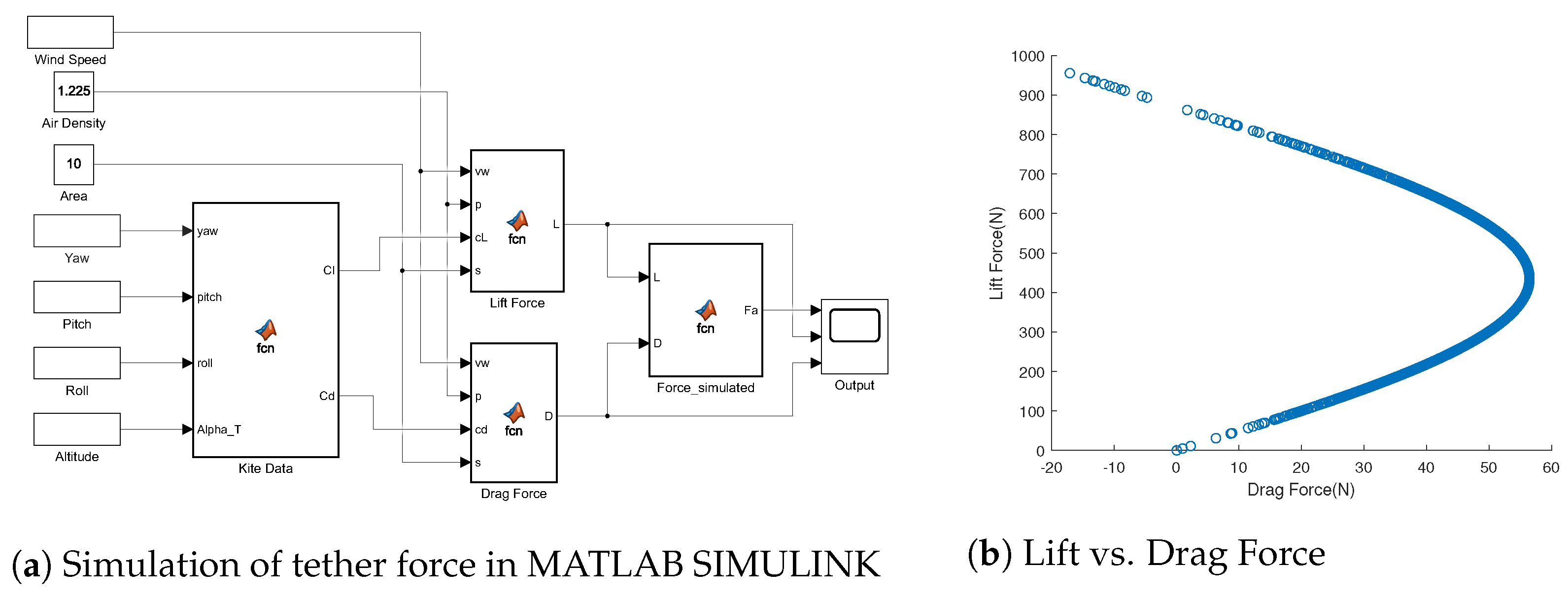
- Tether force estimation using the physical model of a kite is proposed and is simulated using MATLAB SIMULINK.
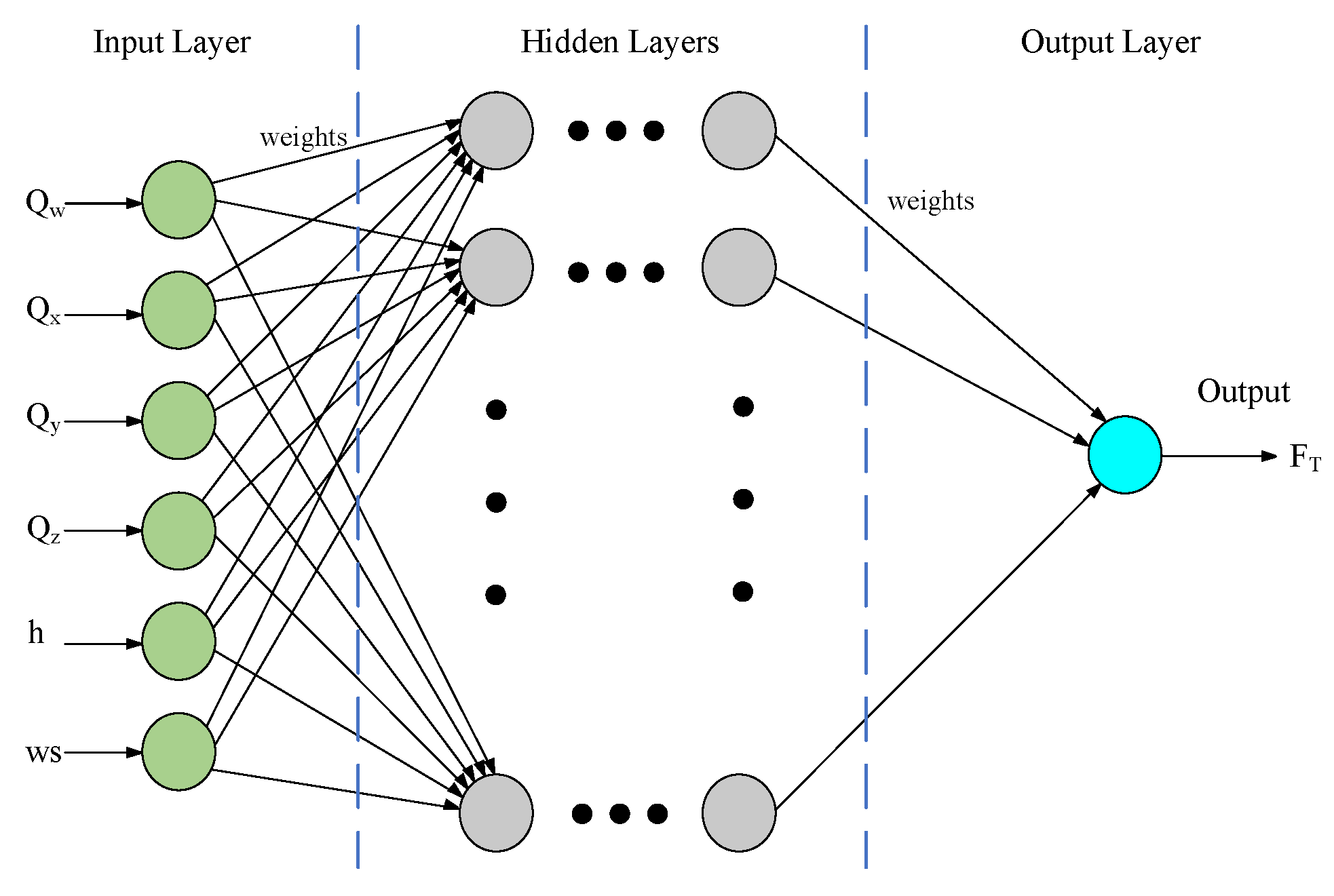
- Two machine learning models—ANN and LSTM—are trained with the known data from the field tests and the models are tested with unknown data to predict the tether force.
- The proposed methods are experimentally validated and the performance of each method is evaluated.
2. Problem Description
2.1. Kite Constraints
2.2. Kite Dynamics
2.3. Kite Field Test Conditions
3. Tether Force Estimation Methods
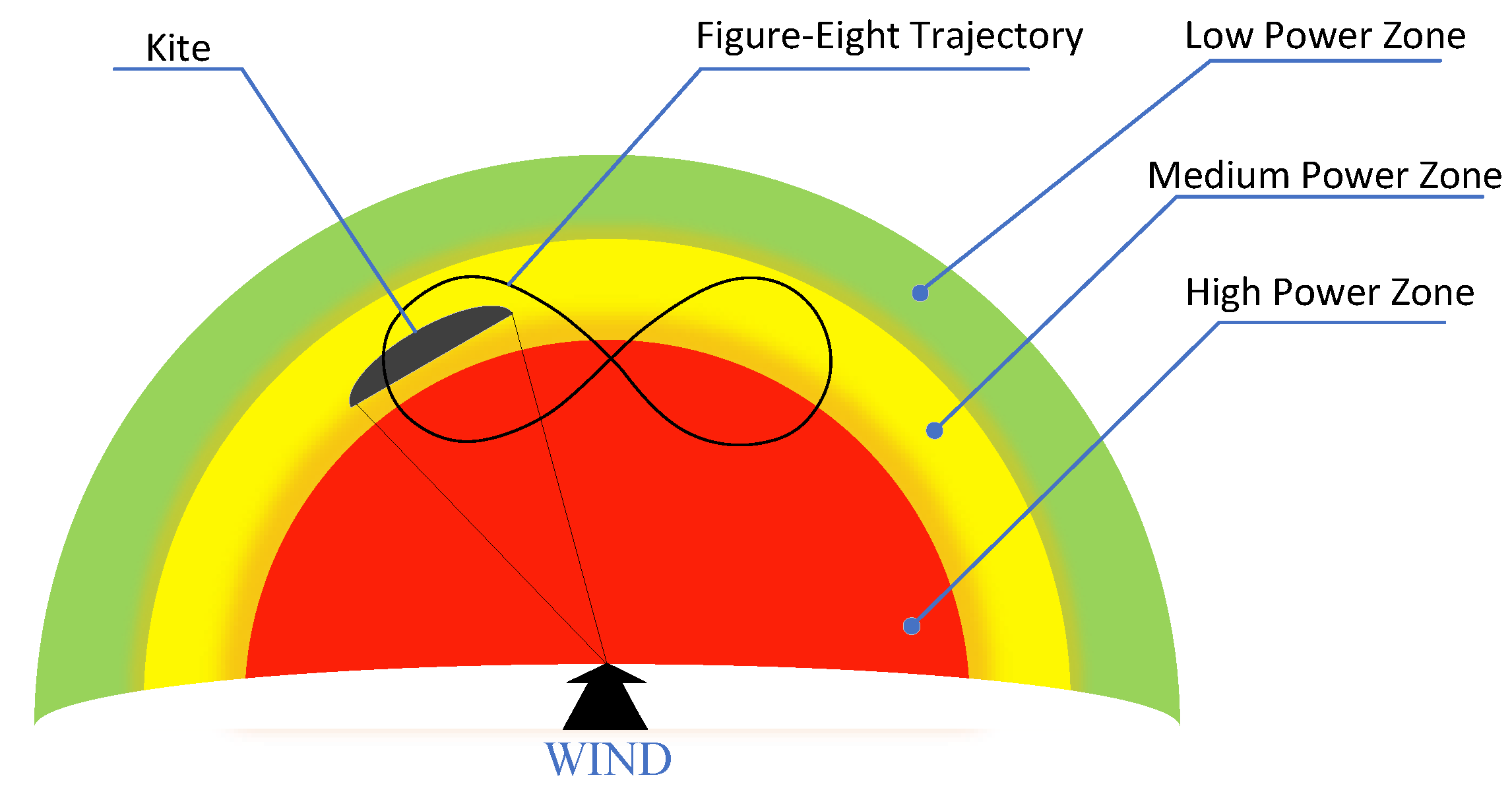
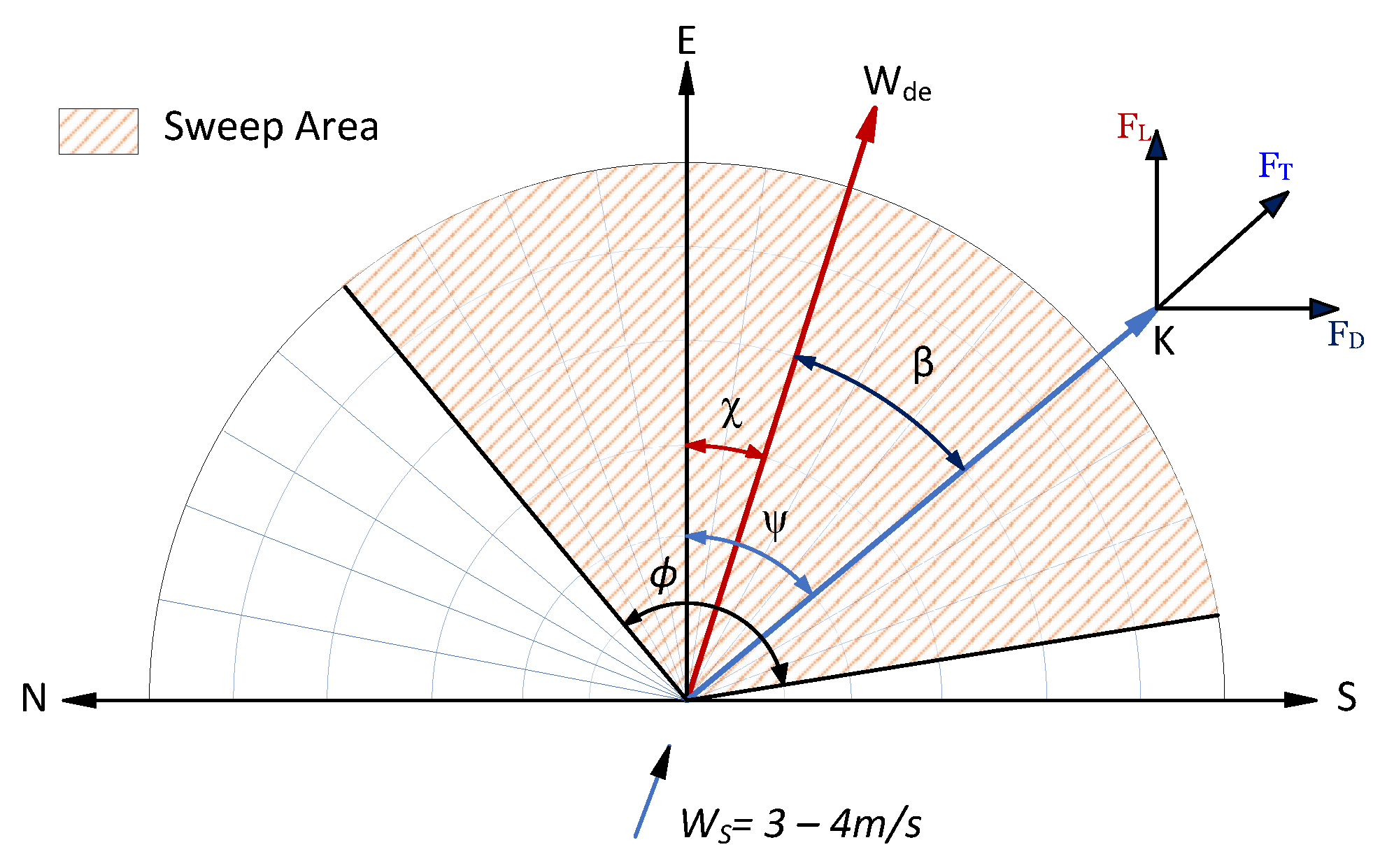
3.1. Wind Window and Crosswind Power
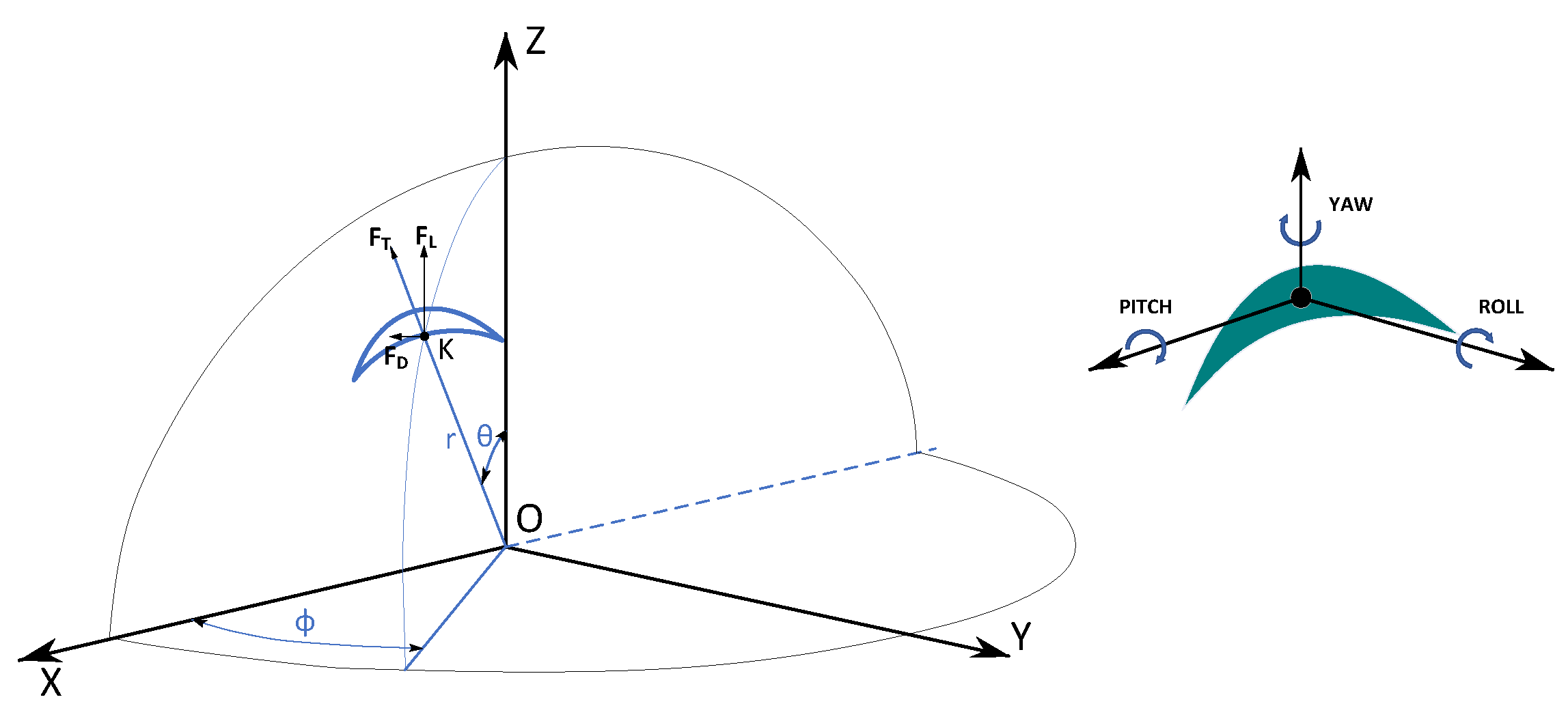
3.2. Kite Kinematics and Aerodynamic Force
3.3. Experimental Setup
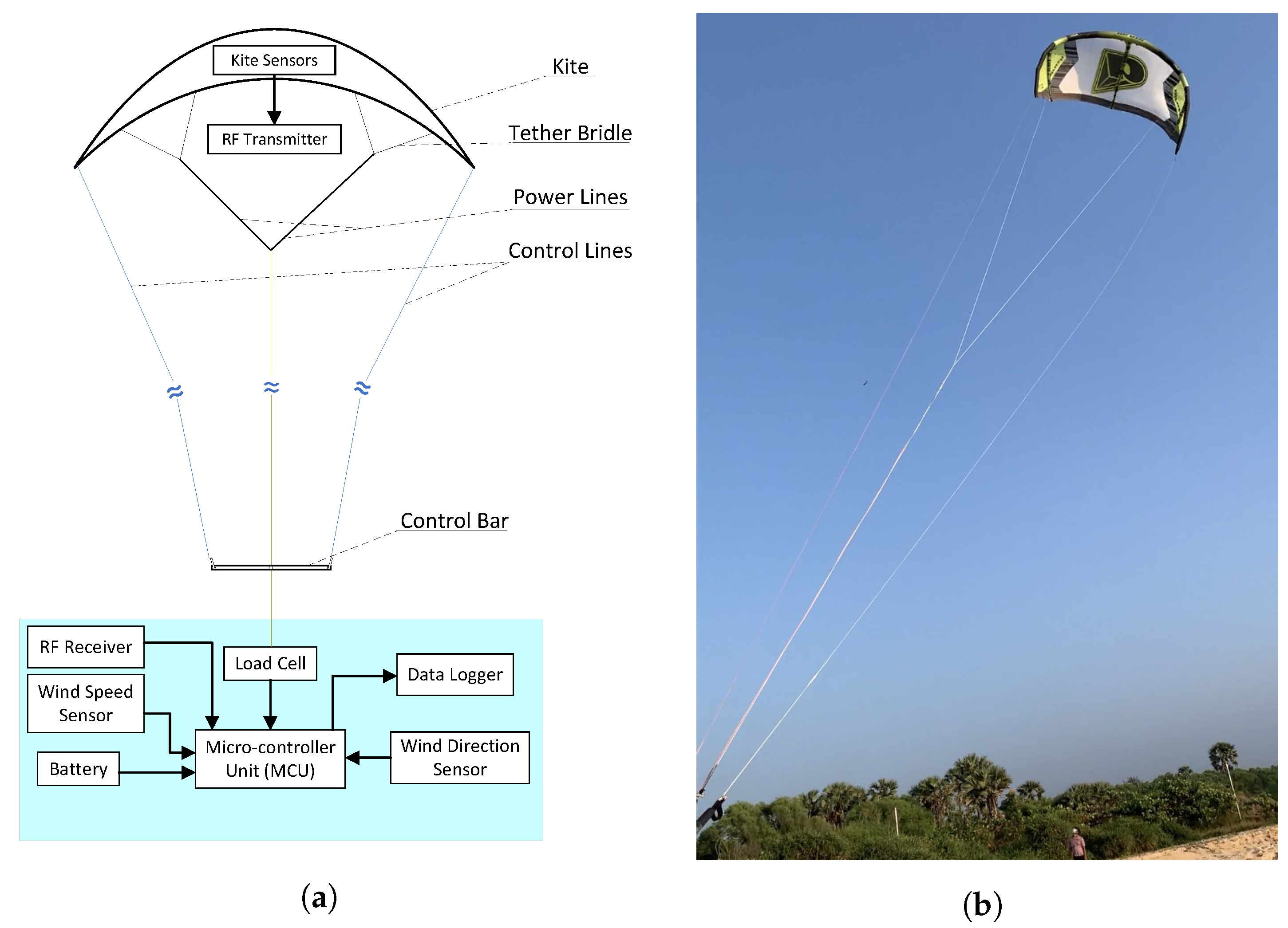
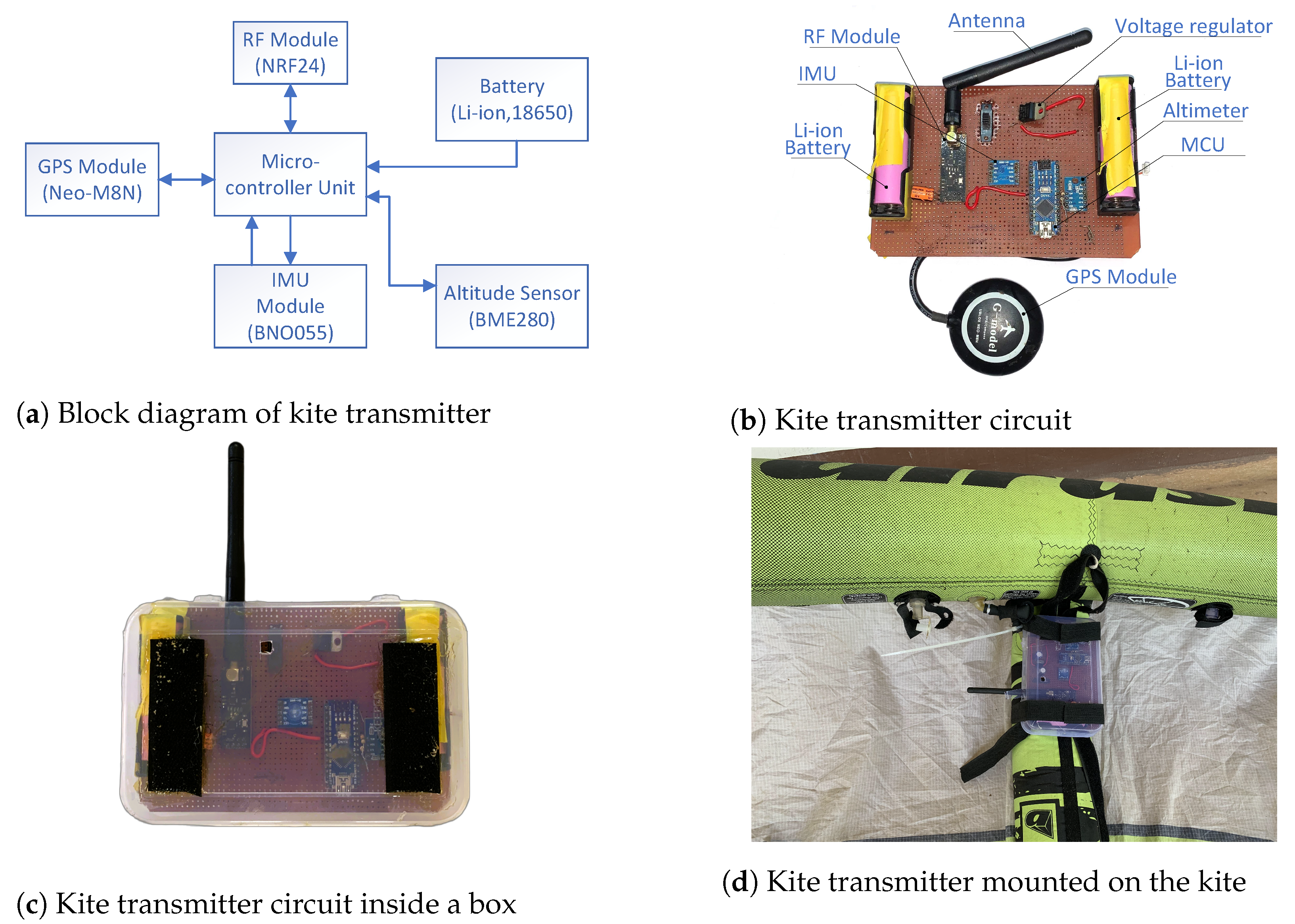
3.3.1. Kite Telemetry System
3.3.2. On-Air Kite Unit
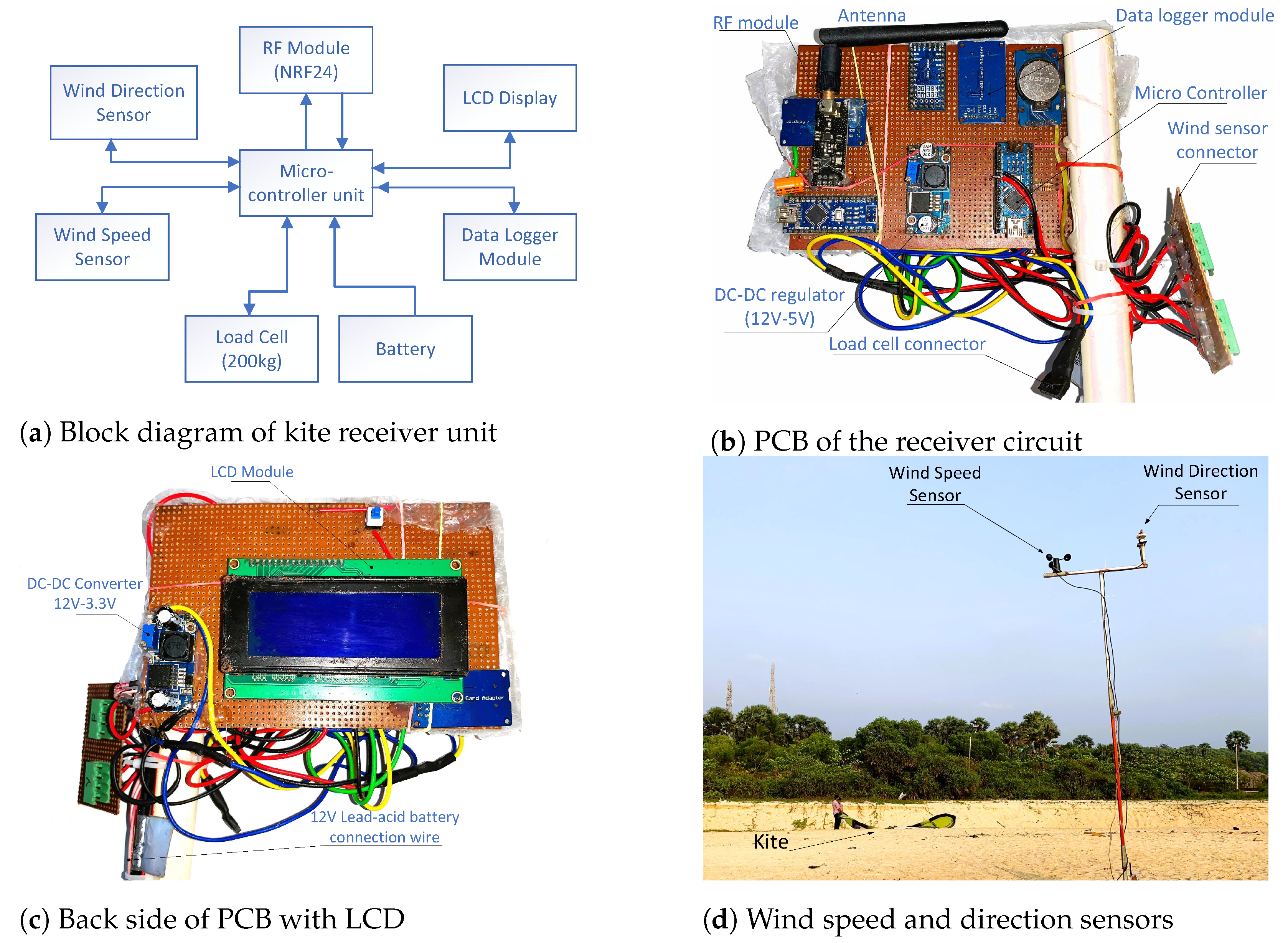
3.3.3. On-Ground Kite Unit
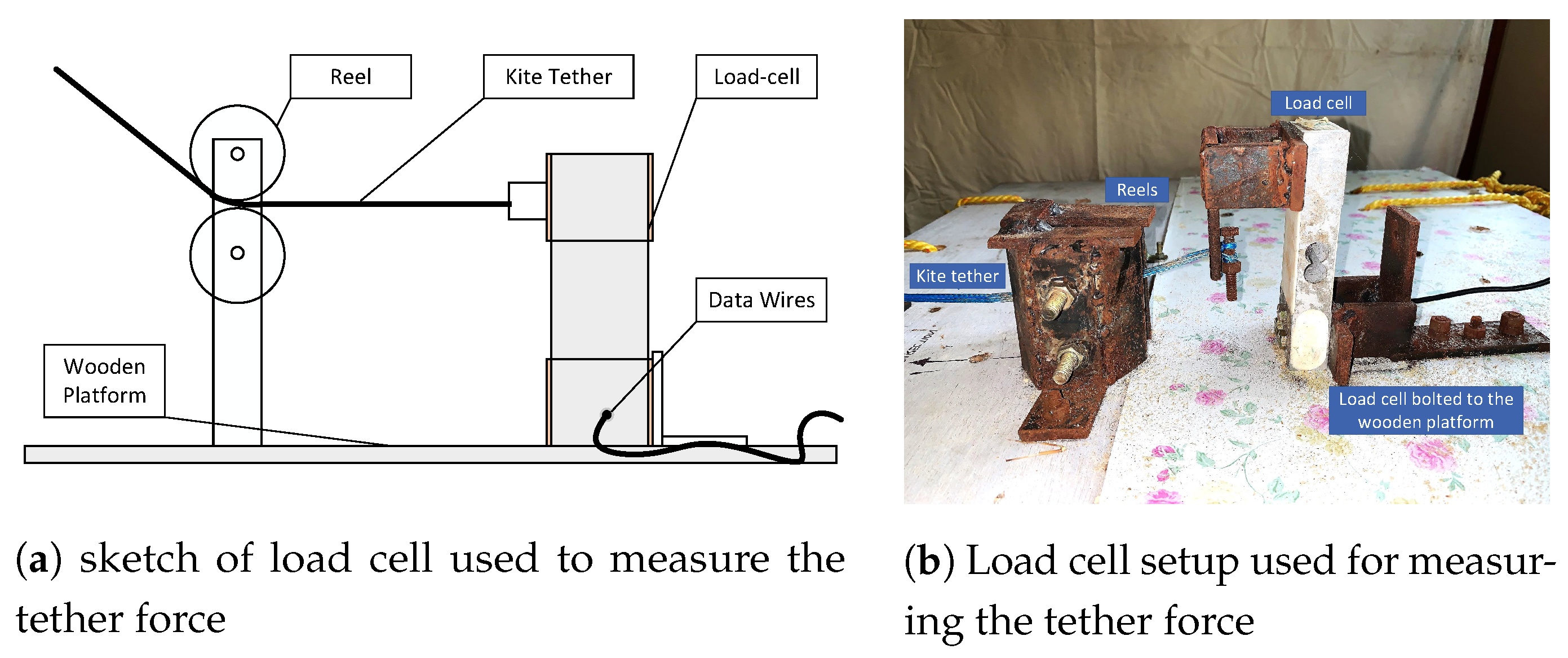
3.3.4. Force Measurement Unit
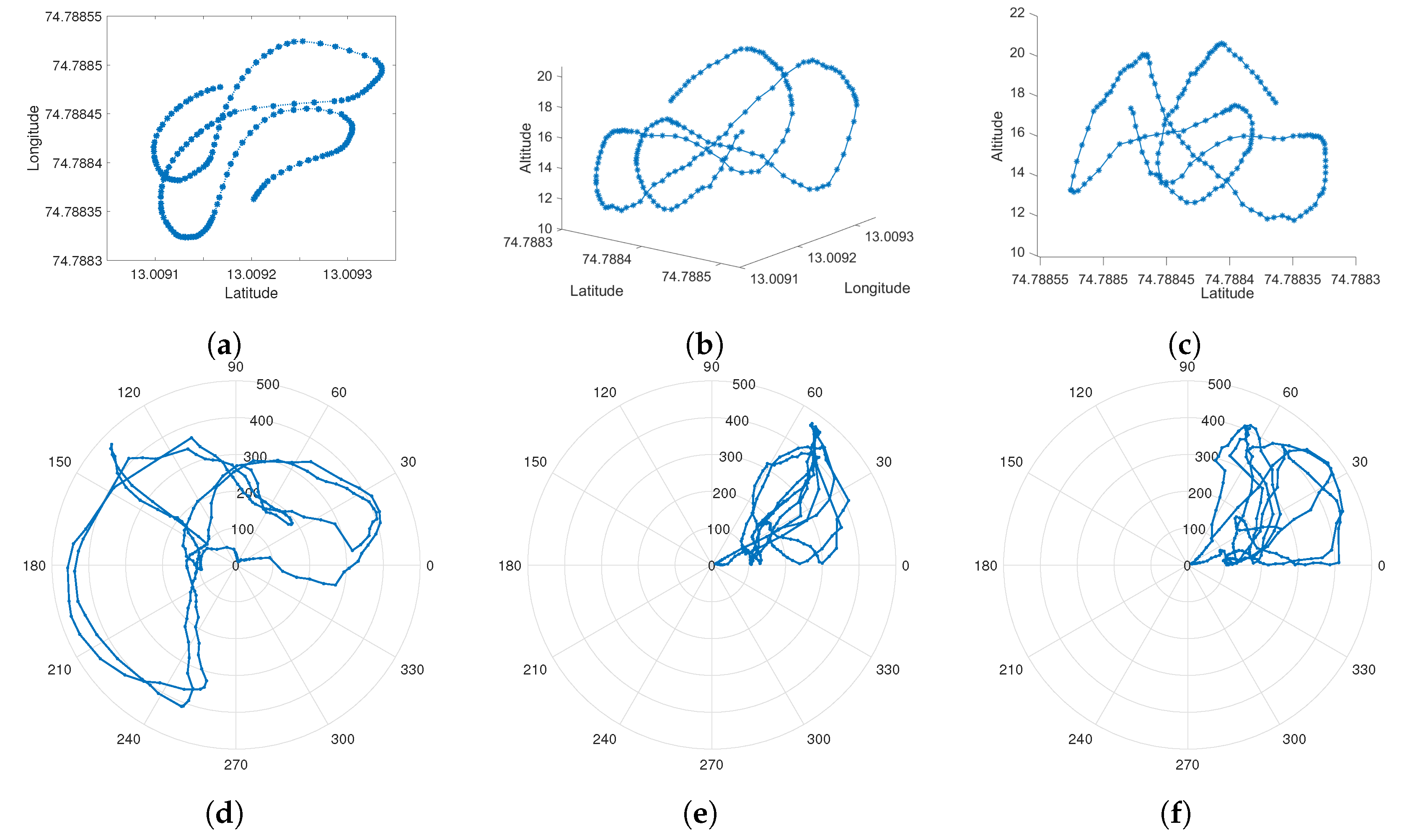
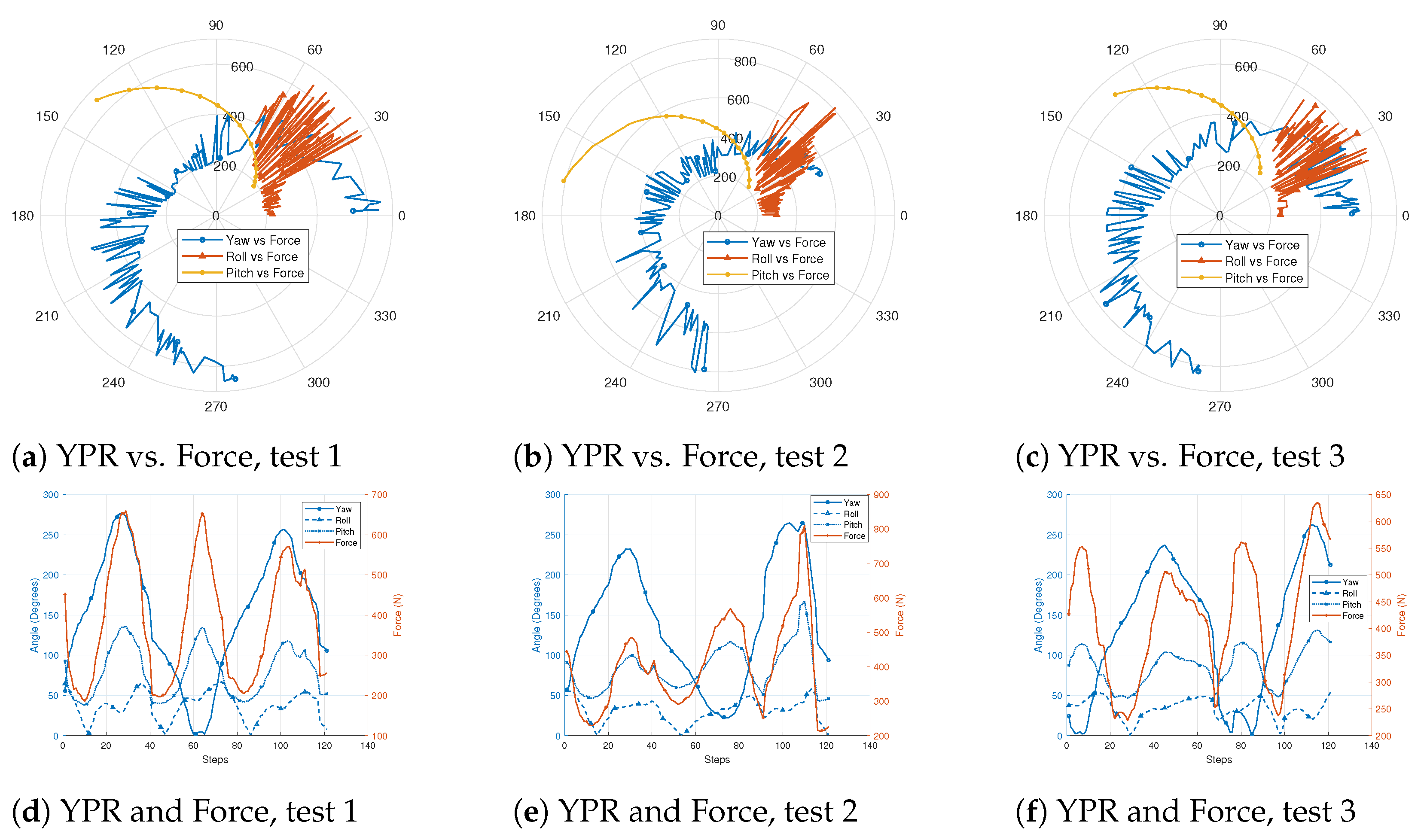
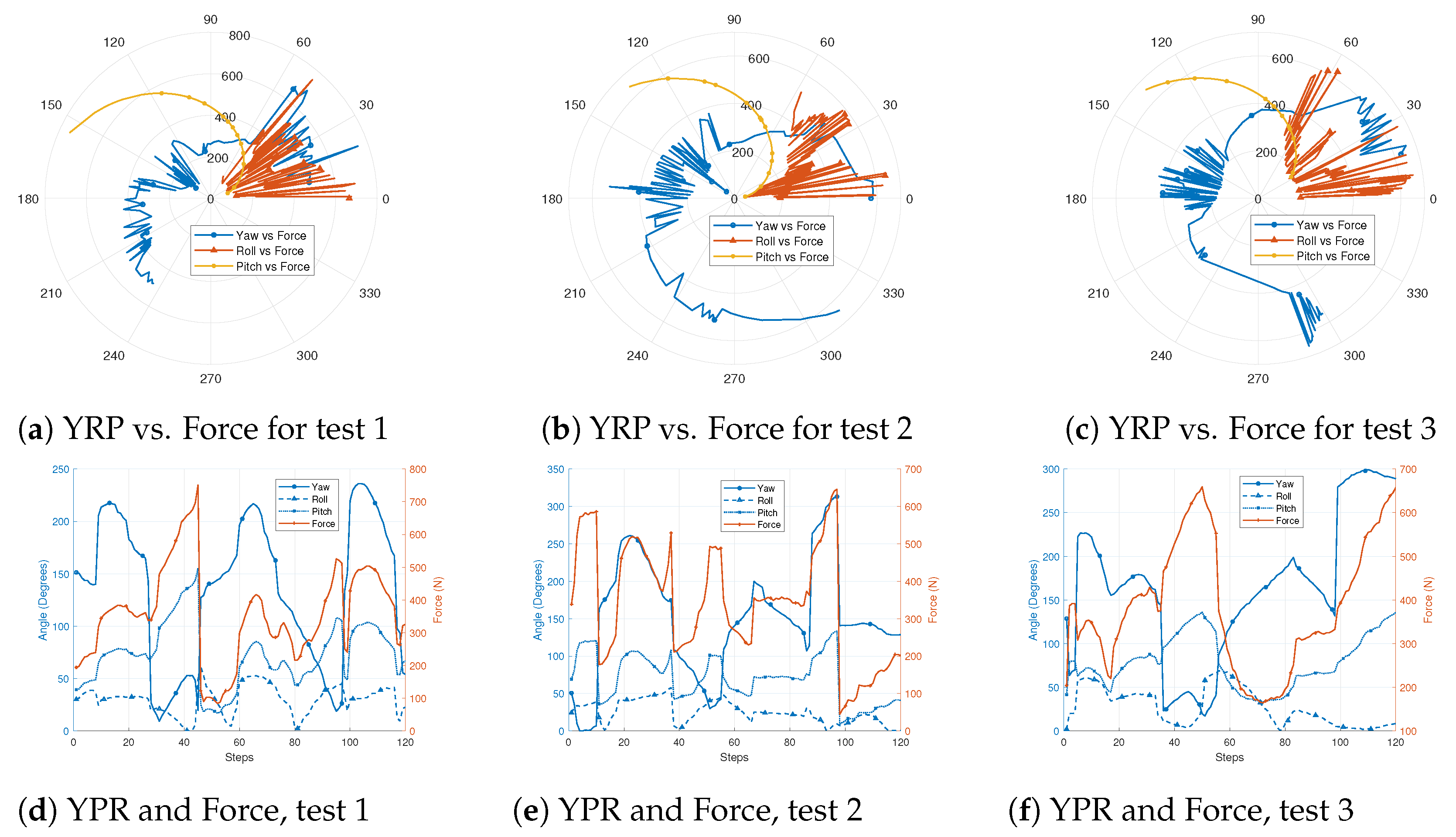
3.3.5. Field Data Collection
3.4. Kite Tether Force Estimation
3.4.1. Kite Inclination Effects
3.4.2. Kite Tether Force Estimation Using Physical Model (PM)
3.4.3. Kite Force Estimation Using Deep Neural Networks
3.4.4. Artificial Neural Network (ANN)
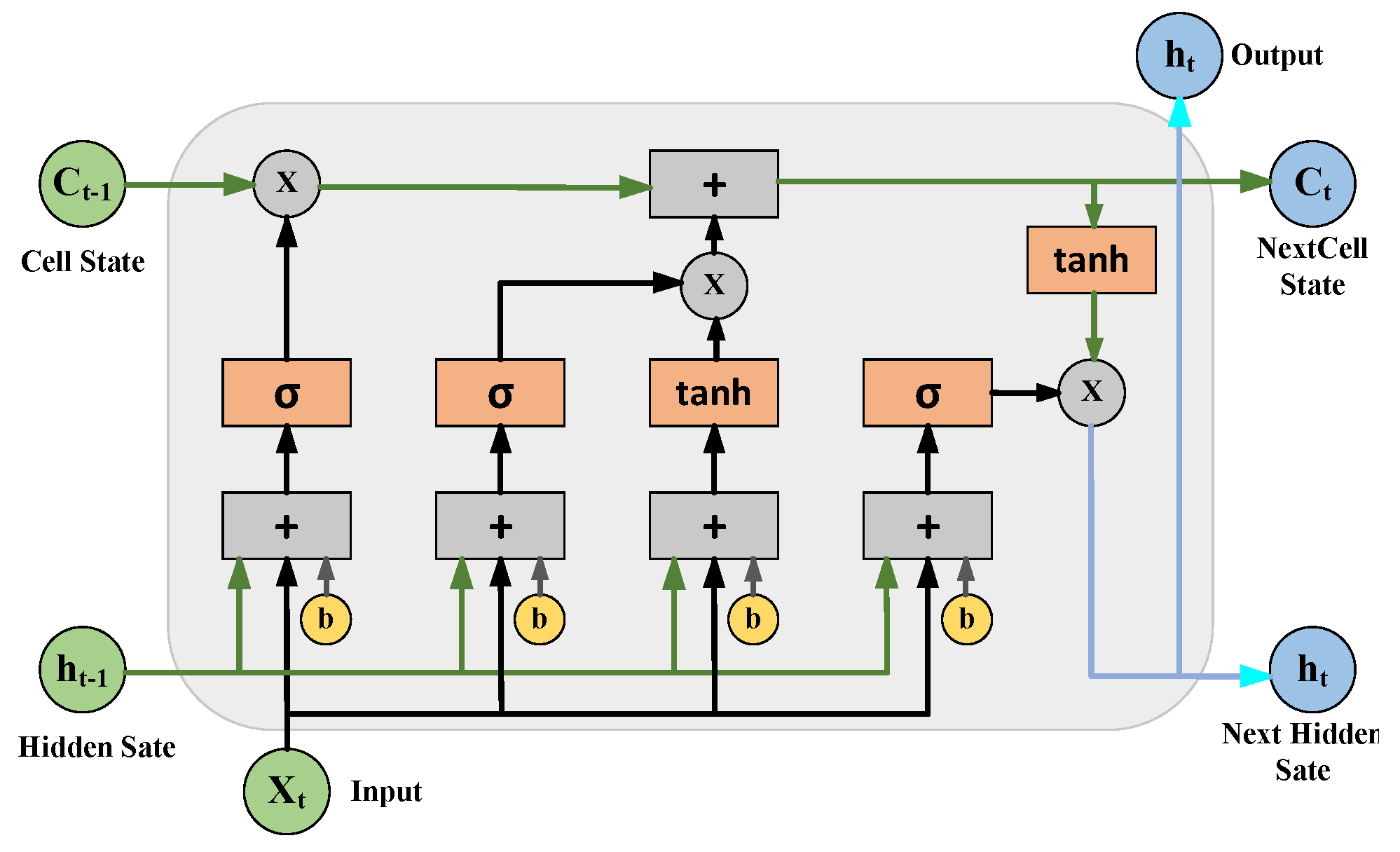
3.4.5. Long Short-Term Memory (LSTM)
4. Results
4.1. PM Simulation Results
4.2. Tether Force Validation
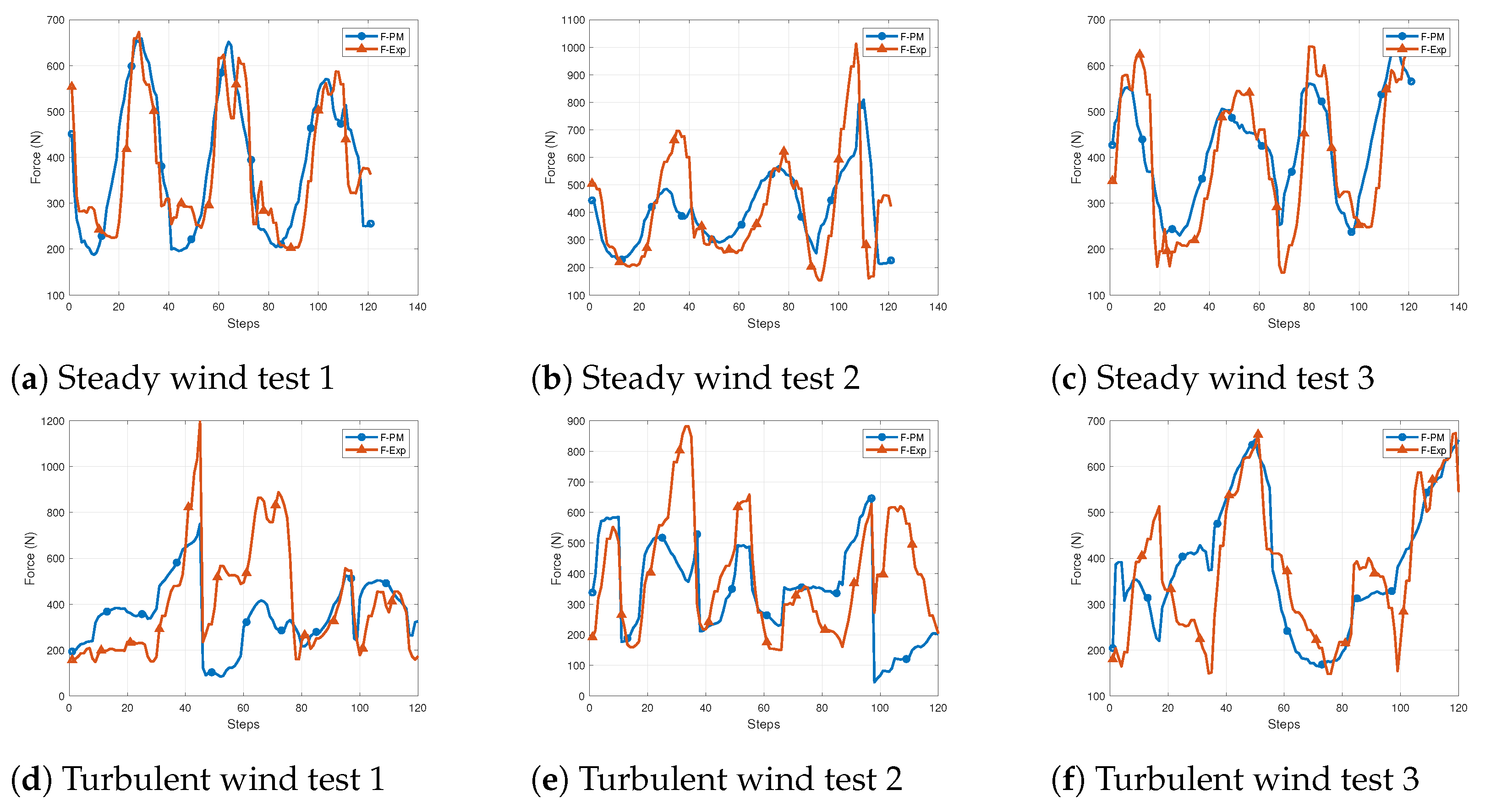
4.2.1. Physical Model (PM) Validation
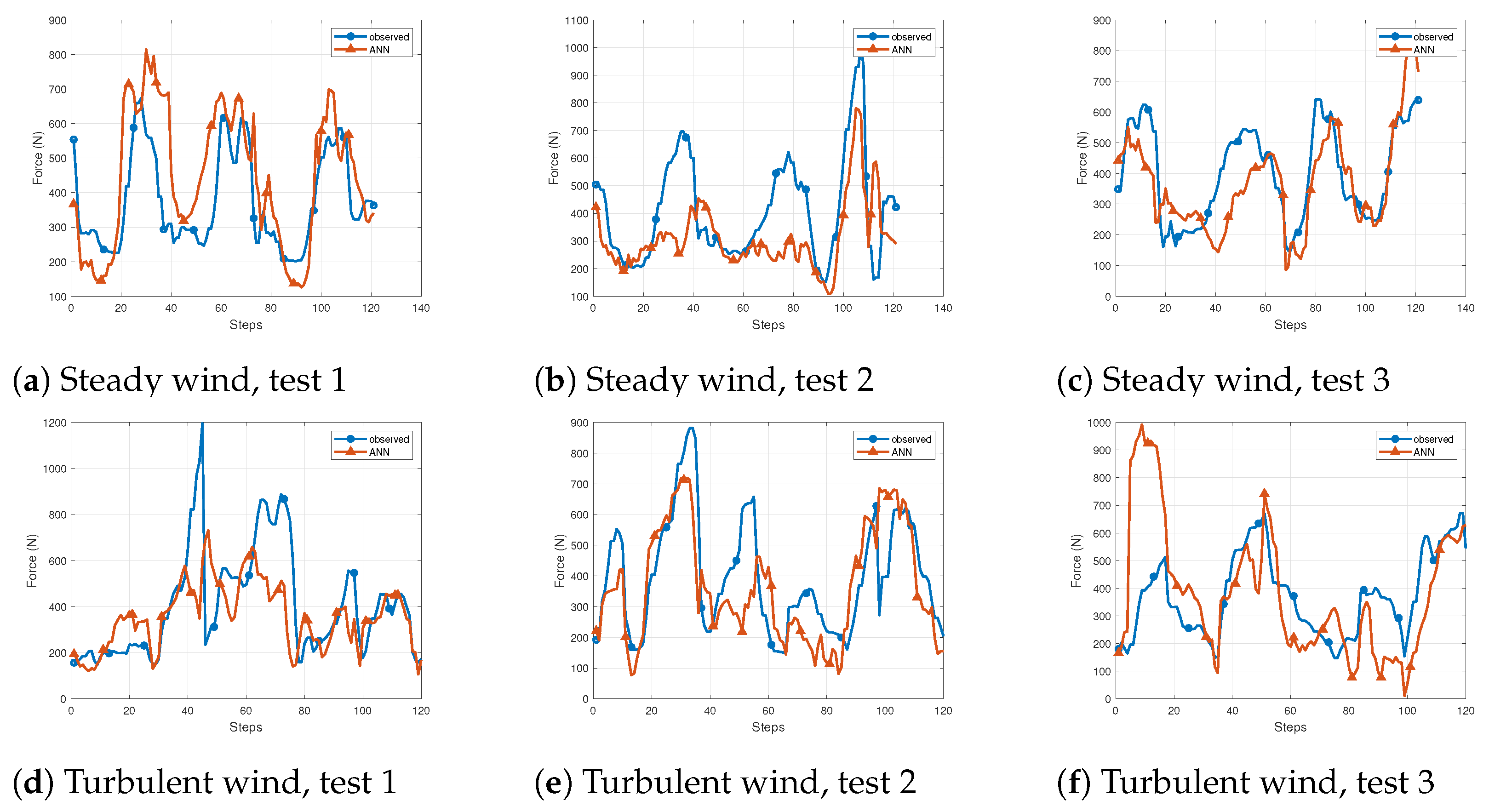
4.2.2. Artificial Neural Network (ANN) Model Validation
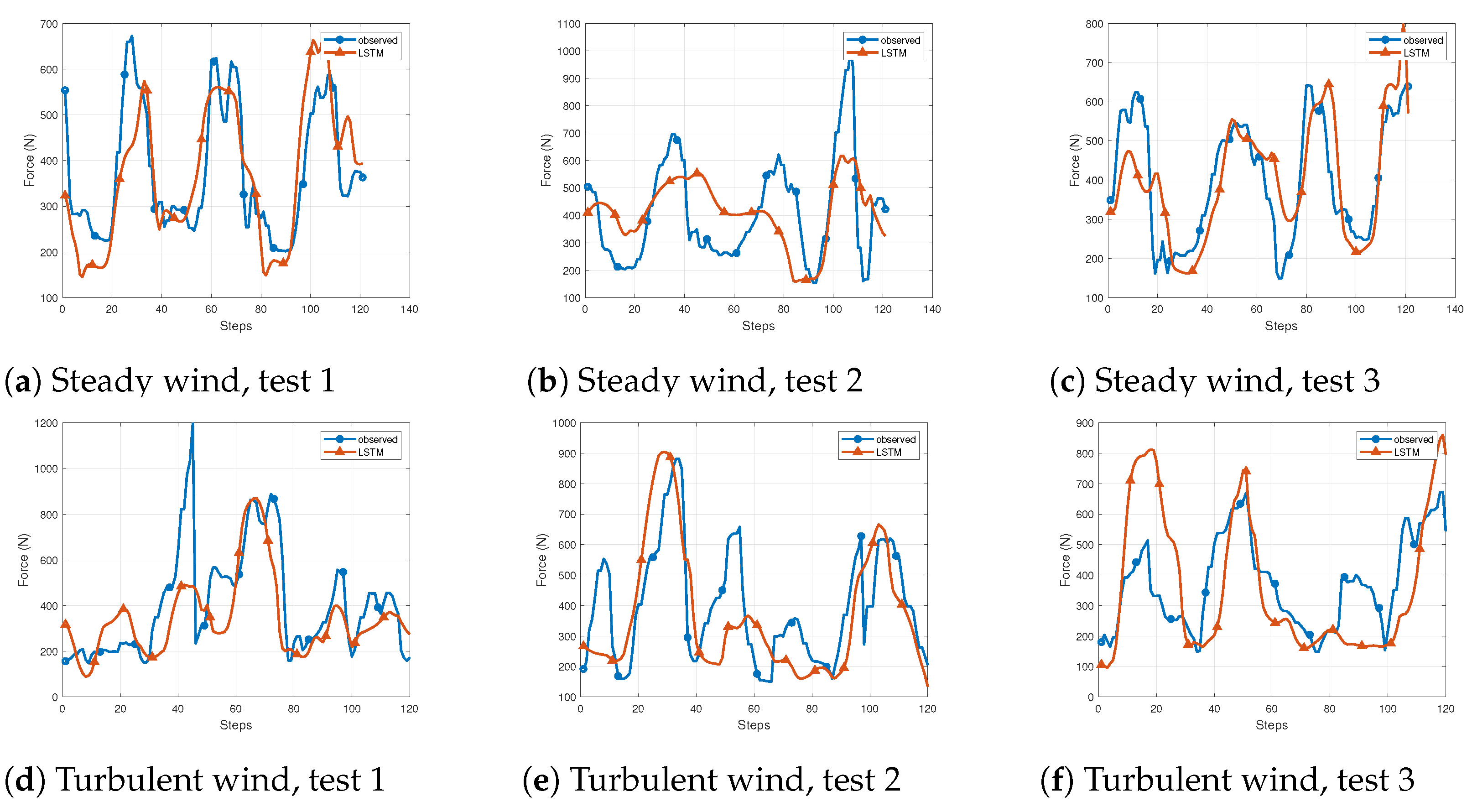
4.2.3. Long Short-Term Memory (LSTM) Model Validation
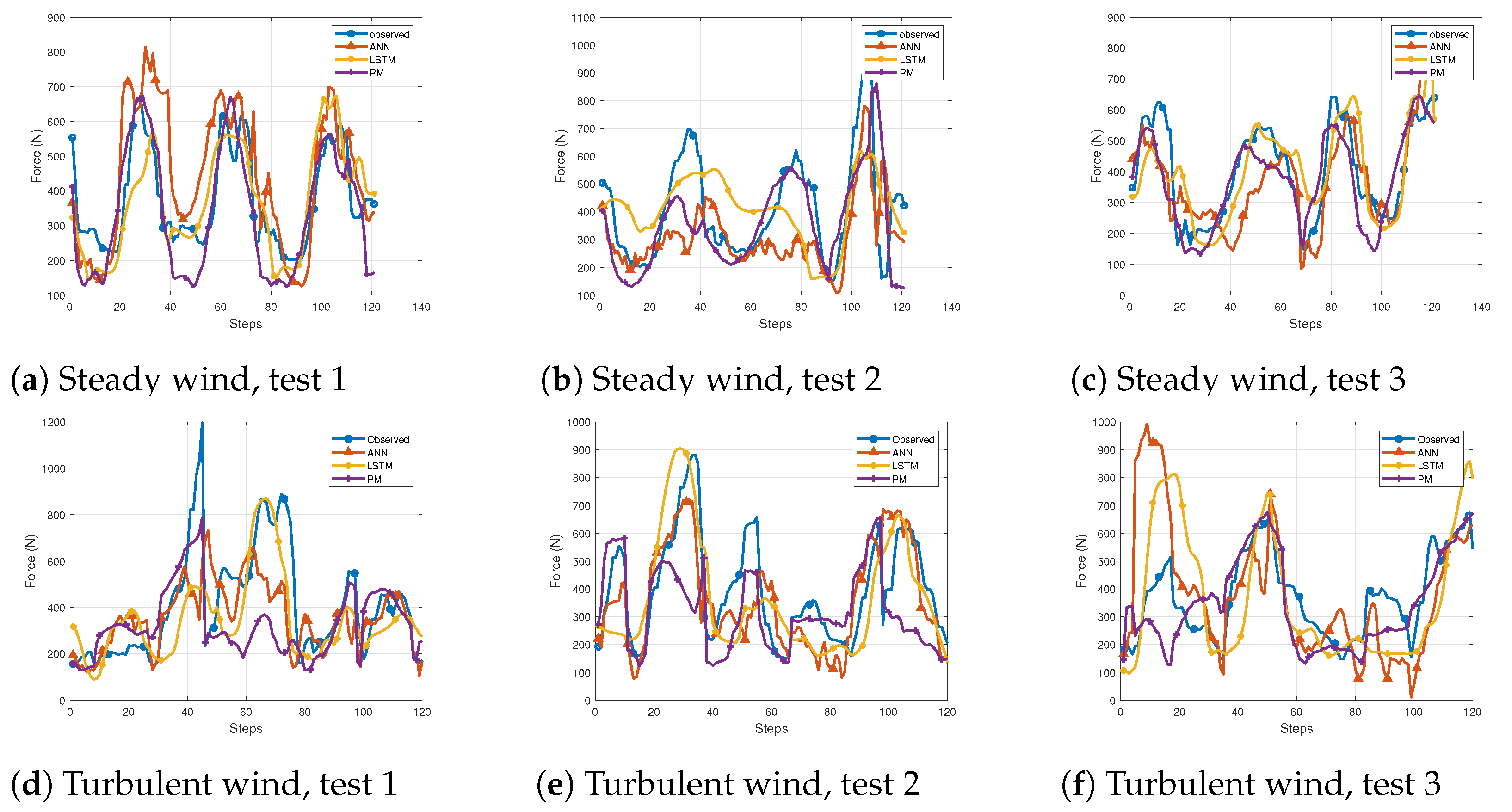
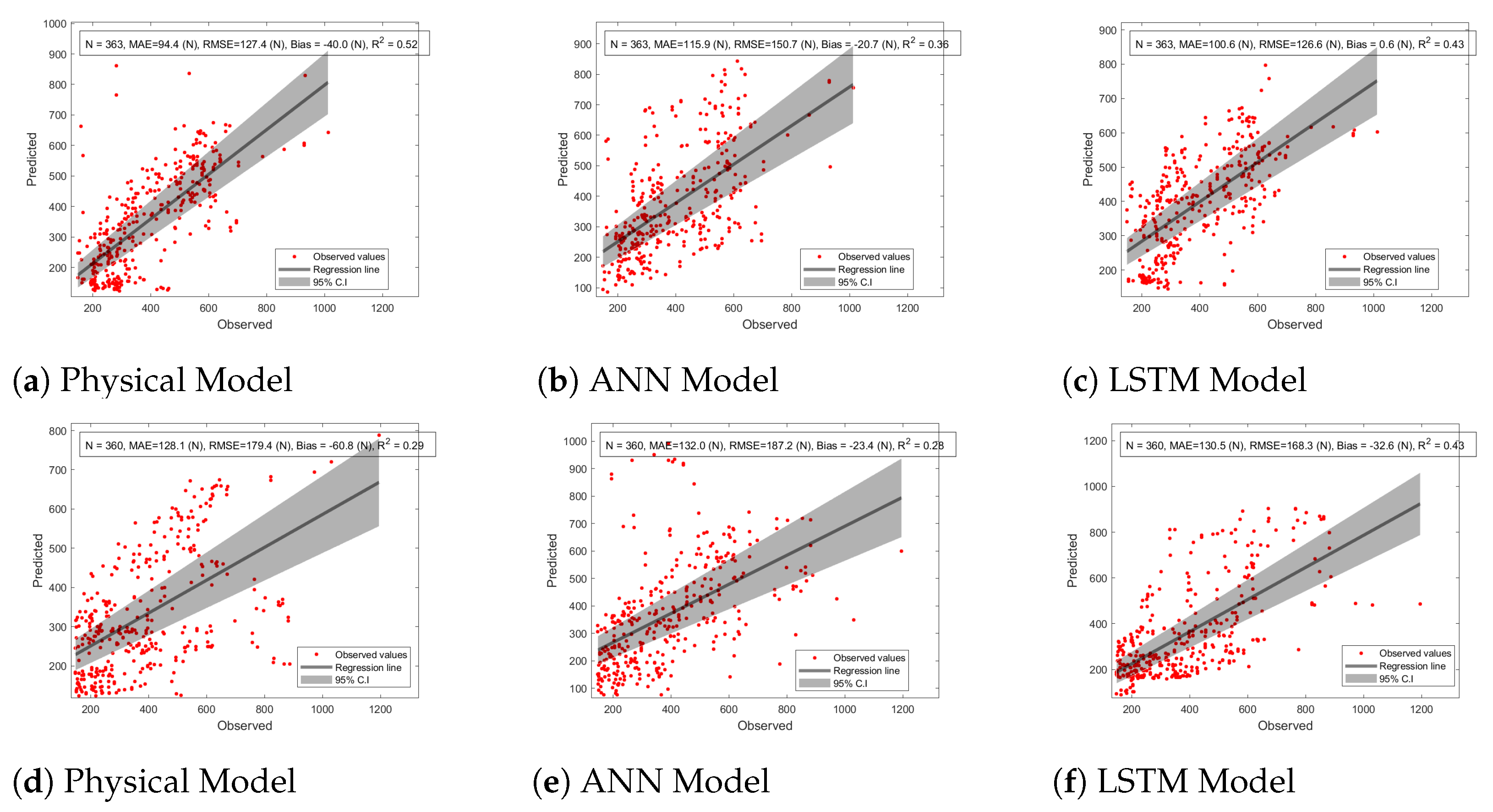
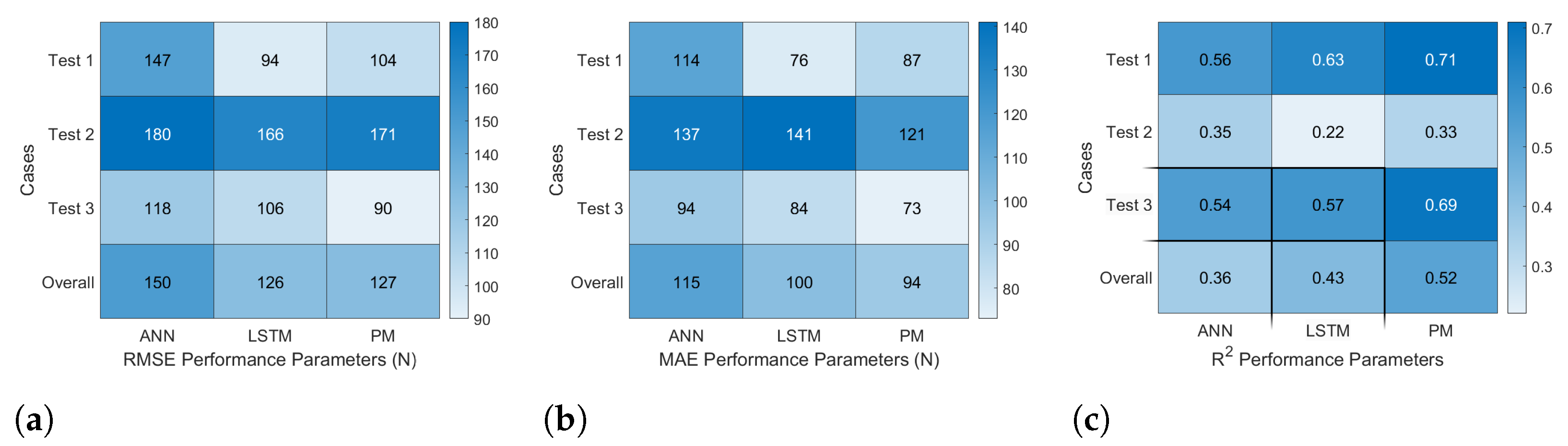
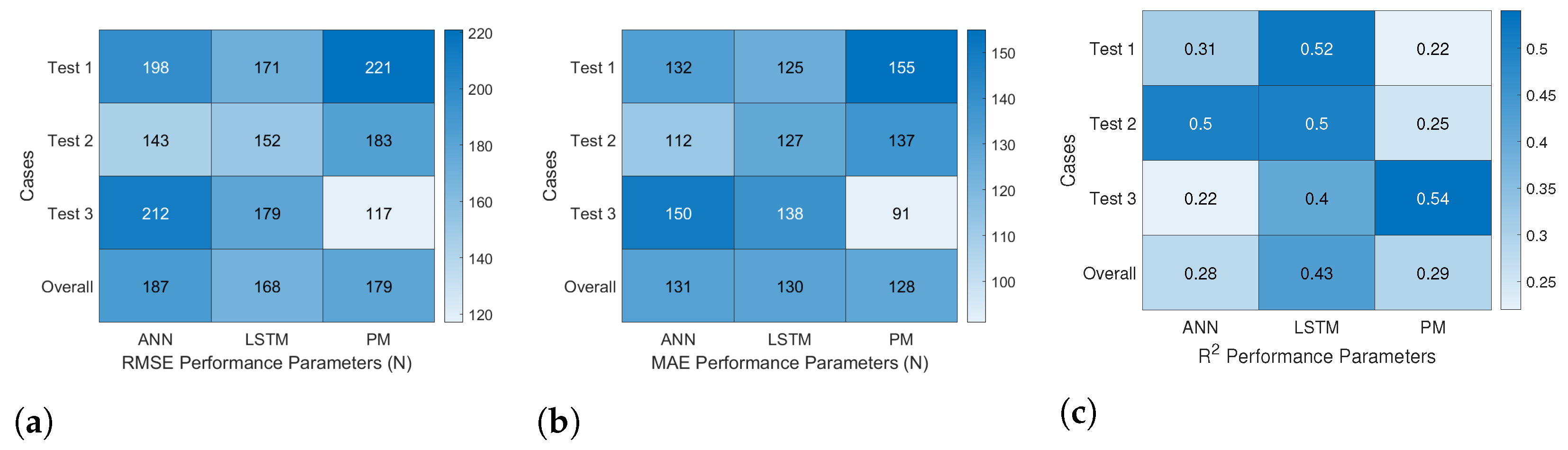
4.2.4. Comparison and Validations of Models
RMSE Method
MAE Method
Method
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Olabi, A.G.; Wilberforce, T.; Elsaid, K.; Sayed, E.T.; Salameh, T.; Abdelkareem, M.A.; Baroutaji, A. A review on failure modes of wind turbine components. Energies 2021, 14, 5241. [Google Scholar] [CrossRef]
- Johansen, K. Blowing in the wind: A brief history of wind energy and wind power technologies in Denmark. Energy Policy 2021, 152, 112139. [Google Scholar] [CrossRef]
- Caduff, M.; Huijbregts, M.A.; Althaus, H.J.; Koehler, A.; Hellweg, S. Wind power electricity: The bigger the turbine, the greener the electricity? Environ. Sci. Technol. 2012, 46, 4725–4733. [Google Scholar] [CrossRef]
- DeCarolis, J.F.; Keith, D.W. The economics of large-scale wind power in a carbon constrained world. Energy Policy 2006, 34, 395–410. [Google Scholar] [CrossRef]
- Meghana, A.; Smitha, B.; Jagwani, S. Technological Advances in Airborne Wind Power: A Review. In Emerging Research in Computing, Information, Communication and Applications; Springer: Singapore, 2022; pp. 349–359. [Google Scholar]
- Zolfaghari, M.; Azarsina, F.; Kani, A. Feasibility Analysis of Airborne Wind Energy System (AWES) Pumping Kite (PK). J. Adv. Res. Fluid Mech. Therm. Sci. 2020, 74, 133–143. [Google Scholar] [CrossRef]
- Cherubini, A.; Papini, A.; Vertechy, R.; Fontana, M. Airborne Wind Energy Systems: A review of the technologies. Renew. Sustain. Energy Rev. 2015, 51, 1461–1476. [Google Scholar] [CrossRef] [Green Version]
- Luchsinger, R.H. Pumping cycle kite power. In Airborne Wind Energy; Springer: Cham, Switzerland, 2013; pp. 47–64. [Google Scholar]
- Duckworth, R. The application of elevated sails (kites) for fuel saving auxiliary propulsion of commercial vessels. J. Wind Eng. Ind. Aerodyn. 1985, 20, 297–315. [Google Scholar] [CrossRef]
- Burgin, N.; Wilson, P. The influence of cable forces on the efficiency of kite devices as a means of alternative propulsion. J. Wind Eng. Ind. Aerodyn. 1985, 20, 349–367. [Google Scholar] [CrossRef]
- Loyd, M.L. Crosswind kite power (for large-scale wind power production). J. Energy 1980, 4, 106–111. [Google Scholar] [CrossRef]
- Argatov, I.; Rautakorpi, P.; Silvennoinen, R. Apparent wind load effects on the tether of a kite power generator. J. Wind Eng. Ind. Aerodyn. 2011, 99, 1079–1088. [Google Scholar] [CrossRef]
- Terink, E.; Breukels, J.; Schmehl, R.; Ockels, W. Flight dynamics and stability of a tethered inflatable kiteplane. J. Aircr. 2011, 48, 503–513. [Google Scholar] [CrossRef] [Green Version]
- Ahmed, M. Optimisation de Contrôle Commande des Systèmes de Génération d’électricité à Cycle de Relaxation. Ph.D. Thesis, Université de Grenoble, Grenoble, France, 2014. [Google Scholar]
- Ruppert, M.B. Development and Validation of a Real Time Pumping Kite Model. Ph.D. Thesis, Delft University of Technology, Delft, The Netherland, 2012. [Google Scholar]
- Akberali, A.F.K.; Kheiri, M.; Bourgault, F. Generalized aerodynamic models for crosswind kite power systems. J. Wind Eng. Ind. Aerodyn. 2021, 215, 104664. [Google Scholar] [CrossRef]
- Rushdi, M.A.; Dief, T.N.; Yoshida, S.; Schmehl, R. Towing test data set of the kyushu university kite system. Data 2020, 5, 69. [Google Scholar] [CrossRef]
- Borobia-Moreno, R.; Ramiro-Rebollo, D.; Schmehl, R.; Sánchez-Arriaga, G. Identification of kite aerodynamic characteristics using the estimation before modeling technique. Wind Energy 2021, 24, 596–608. [Google Scholar] [CrossRef]
- LeCun, Y.; Bengio, Y.; Hinton, G. Deep learning. Nature 2015, 521, 436–444. [Google Scholar] [CrossRef]
- Rushdi, M.A.; Rushdi, A.A.; Dief, T.N.; Halawa, A.M.; Yoshida, S.; Schmehl, R. Power prediction of airborne wind energy systems using multivariate machine learning. Energies 2020, 13, 2367. [Google Scholar] [CrossRef]
- Orzan, N.; Leone, C.; Mazzolini, A.; Oyero, J.; Celani, A. Optimizing Airborne Wind Energy with Reinforcement Learning. arXiv 2022, arXiv:2203.14271. [Google Scholar]
- Fechner, U. A Methodology for the Design of Kite-Power Control Systems. Ph.D. Thesis, Delft University of Technology, Delft, The Netherlands, 2016. [Google Scholar]
- Dief, T.N.; Fechner, U.; Schmehl, R.; Yoshida, S.; Rushdi, M.A. Adaptive flight path control of airborne wind energy systems. Energies 2020, 13, 667. [Google Scholar] [CrossRef] [Green Version]
- Rushdi, M.; Yoshida, S.; Dief, T.N. Simulation of a Tether of a Kite Power System Using a Lumped Mass Model. In Proceedings of the International Exchange and Innovation Conference on Engineering and Sciences (IEICES), Fukuoka, Japan, 18–19 October 2018; Interdisciplinary Graduate School of Engineering Sciences, Kyushu University: Kyushu, Japan, 2018; pp. 42–47. [Google Scholar]
- van der Vlugt, R.; Bley, A.; Noom, M.; Schmehl, R. Quasi-steady model of a pumping kite power system. Renew. Energy 2019, 131, 83–99. [Google Scholar] [CrossRef]
- Oehler, J.; Schmehl, R. Aerodynamic characterization of a soft kite by in situ flow measurement. Wind Energy Sci. 2019, 4, 1–21. [Google Scholar] [CrossRef] [Green Version]
- Baheri, A.; Vermillion, C. Altitude optimization of airborne wind energy systems: A Bayesian optimization approach. In Proceedings of the 2017 American Control Conference (ACC), Seattle, WA, USA, 24–26 May 2017; pp. 1365–1370. [Google Scholar]
- Licitra, G.; Koenemann, J.; Bürger, A.; Williams, P.; Ruiterkamp, R.; Diehl, M. Performance assessment of a rigid wing Airborne Wind Energy pumping system. Energy 2019, 173, 569–585. [Google Scholar] [CrossRef]
- Licitra, G.; Bürger, A.; Williams, P.; Ruiterkamp, R.; Diehl, M. System identification of a rigid wing airborne wind energy system. arXiv 2017, arXiv:1711.10010. [Google Scholar]
- Dief, T.N.; Fechner, U.; Schmehl, R.; Yoshida, S.; Ismaiel, A.M.; Halawa, A.M. System identification, fuzzy control and simulation of a kite power system with fixed tether length. Wind Energy Sci. 2018, 3, 275–291. [Google Scholar] [CrossRef] [Green Version]
- Ahmed, M.; Hably, A.; Bacha, S. Power maximization of a closed-orbit kite generator system. In Proceedings of the 2011 50th IEEE Conference on Decision and Control and European Control Conference, Orlando, FL, USA, 12–15 December 2011; pp. 7717–7722. [Google Scholar]
- Bauer, F.; Kennel, R.M.; Hackl, C.M.; Campagnolo, F.; Patt, M.; Schmehl, R. Drag power kite with very high lift coefficient. Renew. Energy 2018, 118, 290–305. [Google Scholar] [CrossRef] [Green Version]
- Hummel, J.; Göhlich, D.; Schmehl, R. Automatic measurement and characterization of the dynamic properties of tethered membrane wings. Wind Energy Sci. 2019, 4, 41–55. [Google Scholar] [CrossRef] [Green Version]
- Houska, B.; Diehl, M. Optimal control for power generating kites. In Proceedings of the 2007 European Control Conference (ECC), Kos, Greece, 2–5 July 2007; pp. 3560–3567. [Google Scholar]
- Alaimo, A.; Artale, V.; Milazzo, C.; Ricciardello, A. Comparison between Euler and quaternion parametrization in UAV dynamics. Aip Conf. Proc. 2013, 1, 1228–1231. [Google Scholar]
- Castelino, R.V.; Kashyap, Y. Airborne Manoeuvre Tracking Device for Kite-based Wind Power Generation. In Control Applications in Modern Power System; Springer: Cham, Switzerland, 2021; pp. 497–507. [Google Scholar]
- Perumal, L. Quaternion and its application in rotation using sets of regions. Int. J. Eng. Technol. Innov. 2011, 1, 35. [Google Scholar]
- Karduna, A.R.; McClure, P.W.; Michener, L.A. Scapular kinematics: Effects of altering the Euler angle sequence of rotations. J. Biomech. 2000, 33, 1063–1068. [Google Scholar] [CrossRef]
- Dadd, G.M.; Hudson, D.A.; Shenoi, R. Determination of kite forces using three-dimensional flight trajectories for ship propulsion. Renew. Energy 2011, 36, 2667–2678. [Google Scholar] [CrossRef]
- Center, N.G.R. Kite Inclination Effects. 2005. Available online: https://www.grc.nasa.gov/www/k-12/VirtualAero/BottleRocket/airplane/kiteincl.html (accessed on 20 January 2022).
- Paiva, L.T.; Fontes, F.A. Optimal control of underwater kite power systems. In Proceedings of the 2017 International Conference in Energy and Sustainability in Small Developing Economies (ES2DE), Funchal, Portugal, 10–12 July 2017; pp. 1–6. [Google Scholar]
- Hobbs, S. A Quantitative Study of Kite Performance in Natural Wind with Application to Kite Anemometry. Ph.D. Thesis, Cranfield University, Bedford, UK, 1986. [Google Scholar]
- Wang, S.C. Artificial neural network. In Interdisciplinary Computing in Java Programming; Springer: Cham, Switrzerland, 2003; pp. 81–100. [Google Scholar]
- Ahmad, A.S.; Hassan, M.Y.; Abdullah, M.P.; Rahman, H.A.; Hussin, F.; Abdullah, H.; Saidur, R. A review on applications of ANN and SVM for building electrical energy consumption forecasting. Renew. Sustain. Energy Rev. 2014, 33, 102–109. [Google Scholar] [CrossRef]
- Schmidhuber, J.; Hochreiter, S. Long short-term memory. Neural. Comput. 1997, 9, 1735–1780. [Google Scholar]
- Greff, K.; Srivastava, R.K.; Koutník, J.; Steunebrink, B.R.; Schmidhuber, J. LSTM: A search space odyssey. IEEE Trans. Neural Netw. Learn. Syst. 2016, 28, 2222–2232. [Google Scholar] [CrossRef] [PubMed]

























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Kite Parameters | |
|---|---|
| No. of Lines | 4 lines |
| Surface Area | 12 |
| No. of Struts | 3 |
| Canopy Material | Ripstop Nylon |
| Weight (Deflated) | 3.5 kg |
| Type of kite | Supported leading-edge kite (SLE) |
| Sl No | Part Name | On-Air Kite Unit | On-Ground Kite Unit |
|---|---|---|---|
| 1 | Wireless Module | NRF24L01 2.4 GHz | NRF24L01 2.4 GHz |
| 2 | Micro-Controller Unit (MCU) | ATMEGA328p, 8 bit, 16 MHz, 32 KB flash, 2 KB SRAM, 14 I/O pins | ATMEGA328p, 8 bit, 16 MHz, 32 KB flash, 2 KB SRAM, 14 I/O pins |
| 3 | Sensors (20 Hz Sampling) | IMU-BNO055 Altimeter-BME280 GPS—Neo M8N | Loadcell with HX711 ADC Anemometer (Cup type) Wind direction (Encoder) |
| 4 | Data Logging | NA | SD card module |
| 5 | Power Source | 18650 Li-ion battery (Two in series—8 V) | 12 V, 7.5 Ah Lead Acid Battery |
| Data Point | Qw | Qx | Qy | Qz | Altitude (m) | Latitude | Longitude | Load-Cell Analog Value | Wind Speed (m/s) | Wind Direction (Degrees) |
|---|---|---|---|---|---|---|---|---|---|---|
| 1 | 0.04 | −0.36 | 0.82 | 0.44 | 0.43 | 130091287 | 747885344 | 354,420 | 3.58 | 15 |
| 2 | 0.06 | −0.37 | 0.82 | 0.44 | 0.17 | 130091287 | 747885344 | 611,959 | 3.63 | 6 |
| 3 | 0.13 | −0.4 | 0.78 | 0.47 | 0.96 | 130091263 | 747885311 | 778,686 | 3.58 | 3 |
| 4 | 0.22 | −0.44 | 0.73 | 0.48 | 1.95 | 130091232 | 747885259 | 1,012,329 | 3.58 | 7 |
| 5 | 0.26 | −0.45 | 0.72 | 0.46 | 2.41 | 130091214 | 747885219 | 1,020,015 | 3.53 | 13 |
| 6 | 0.3 | −0.45 | 0.73 | 0.42 | 4.98 | 130091167 | 747885097 | 955,023 | 3.55 | 17 |
| 7 | 0.31 | −0.44 | 0.75 | 0.4 | 5.93 | 130091147 | 747885017 | 976,031 | 3.6 | 14 |
| 8 | 0.27 | −0.41 | 0.79 | 0.36 | 7.14 | 130091131 | 747884937 | 984,059 | 3.6 | 9 |
| 9 | 0.2 | −0.37 | 0.85 | 0.32 | 8.16 | 130091119 | 747884748 | 947,582 | 3.63 | 8 |
| 10 | 0.17 | −0.34 | 0.89 | 0.27 | 10.05 | 130091119 | 747884655 | 788,606 | 3.63 | 11 |
| 11 | 0.15 | −0.32 | 0.9 | 0.25 | 10.66 | 130091148 | 747884473 | 607,128 | 3.68 | 13 |
| 12 | 0.16 | −0.32 | 0.9 | 0.22 | 12.23 | 130091164 | 747884386 | 550,783 | 3.7 | 6 |
| 13 | 0.19 | −0.33 | 0.91 | 0.18 | 13.89 | 130091212 | 747884234 | 461,953 | 3.65 | 6 |
| 14 | 0.2 | −0.34 | 0.9 | 0.17 | 15.53 | 130091240 | 747884159 | 399,323 | 3.65 | 15 |
| 15 | 0.2 | −0.34 | 0.91 | 0.15 | 16.33 | 130091300 | 747884055 | 405,638 | 3.65 | 12 |
| S No. | Items | Detail of ANN | Detail of LSTM |
|---|---|---|---|
| 1 | Target | Tether force | Tether force |
| 2 | Input Variable | , , , , Altitude, Wind Speed | , , , , Altitude, Wind Speed |
| 3 | Training Parameters | Learning rate: 0.0001, Number of epochs: 1000 | Learning rate: 0.0001, Dropout: 0.2, Mini-Batch Size: 8, Number of epochs: 1000 |
| 4 | Training dataset | Steady Wind Case (30,000) Dynamic Case (30,000) | Steady Wind Case (30,000) Dynamic Case (30,000) |
| 5 | Test dataset | Steady Wind Case (1000) Dynamic Case (1000) | Steady Wind Case (1000) Dynamic Case (1000) |
| 6 | Network layer | 4 (hidden layers) | 6 |
| 7 | Number of neurons in each layer | 100:50:25:5 | 100:50:50:25:25:5 |
| 8 | Training Method | Adam | Adam |
| 9 | Loss function | mse | mse |
| 10 | Training Type | Regression | Regression |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Castelino, R.V.; Kashyap, Y.; Kosmopoulos, P. Airborne Kite Tether Force Estimation and Experimental Validation Using Analytical and Machine Learning Models for Coastal Regions. Remote Sens. 2022, 14, 6111. https://doi.org/10.3390/rs14236111
Castelino RV, Kashyap Y, Kosmopoulos P. Airborne Kite Tether Force Estimation and Experimental Validation Using Analytical and Machine Learning Models for Coastal Regions. Remote Sensing. 2022; 14(23):6111. https://doi.org/10.3390/rs14236111
Chicago/Turabian StyleCastelino, Roystan Vijay, Yashwant Kashyap, and Panagiotis Kosmopoulos. 2022. "Airborne Kite Tether Force Estimation and Experimental Validation Using Analytical and Machine Learning Models for Coastal Regions" Remote Sensing 14, no. 23: 6111. https://doi.org/10.3390/rs14236111
APA StyleCastelino, R. V., Kashyap, Y., & Kosmopoulos, P. (2022). Airborne Kite Tether Force Estimation and Experimental Validation Using Analytical and Machine Learning Models for Coastal Regions. Remote Sensing, 14(23), 6111. https://doi.org/10.3390/rs14236111