
Assessment of the Steering Precision of a UAV along the Flight Profiles Using a GNSS RTK Receiver




Abstract
:1. Introduction
2. Materials and Methods
2.1. Measurement Equipment
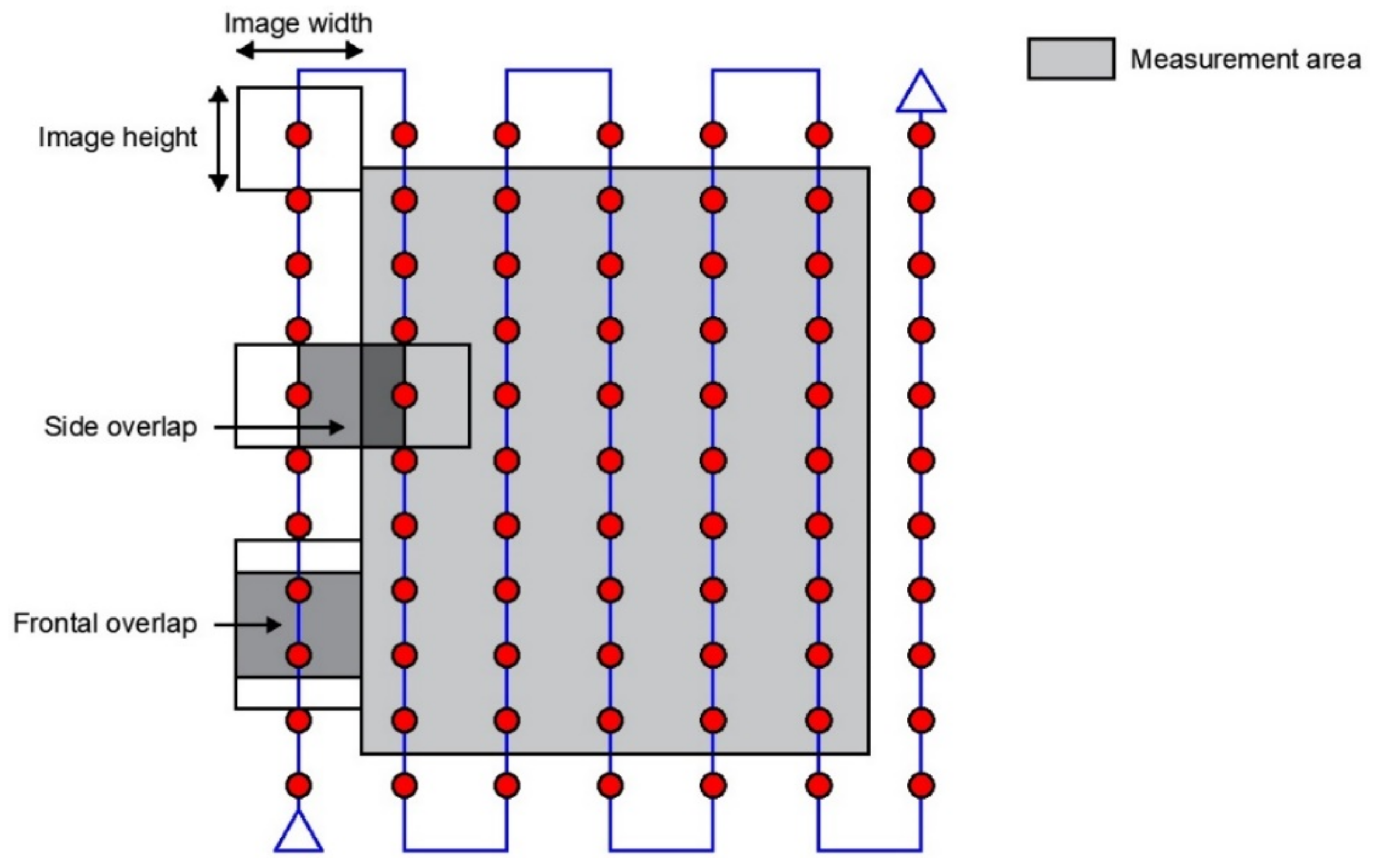
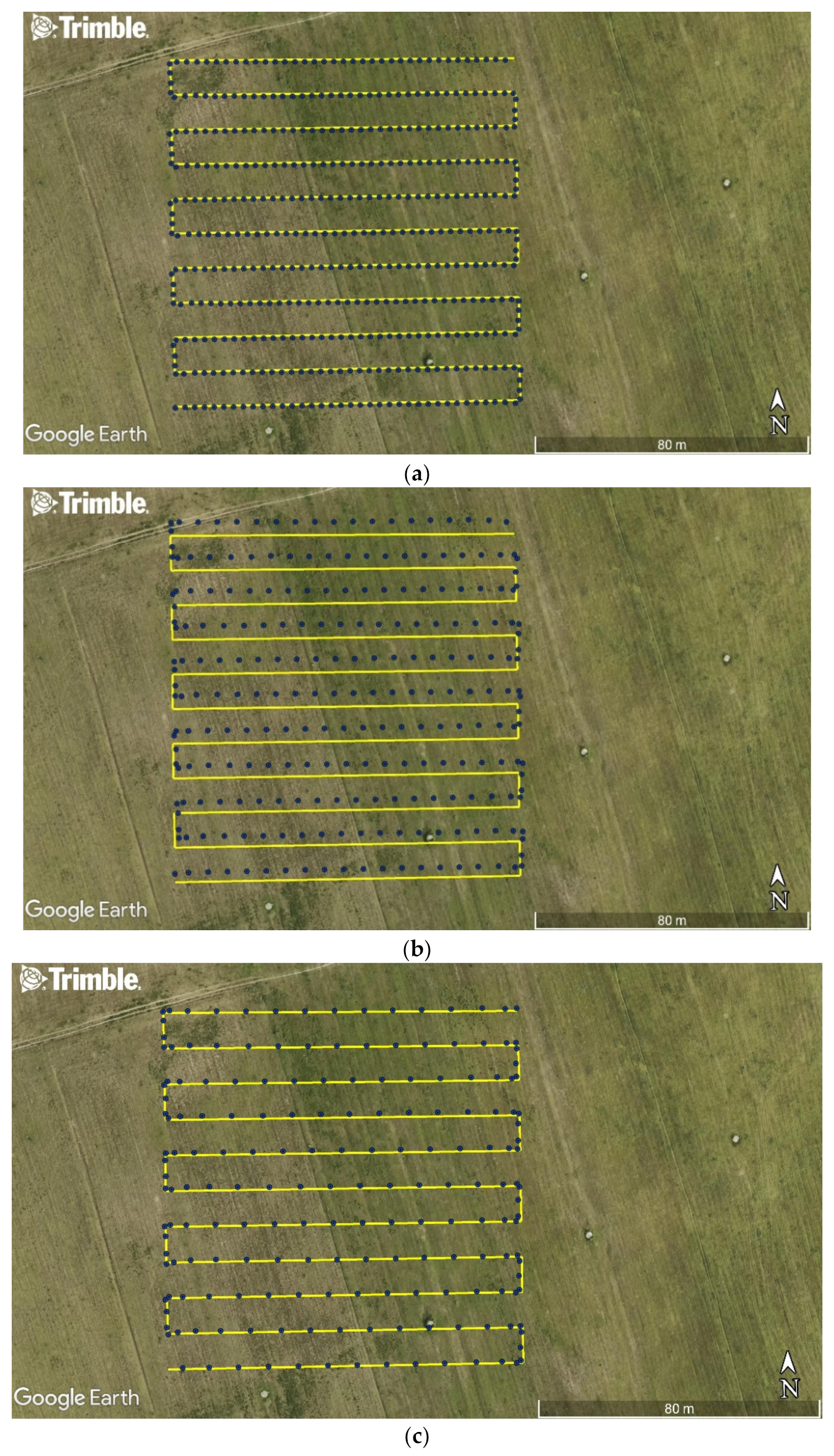
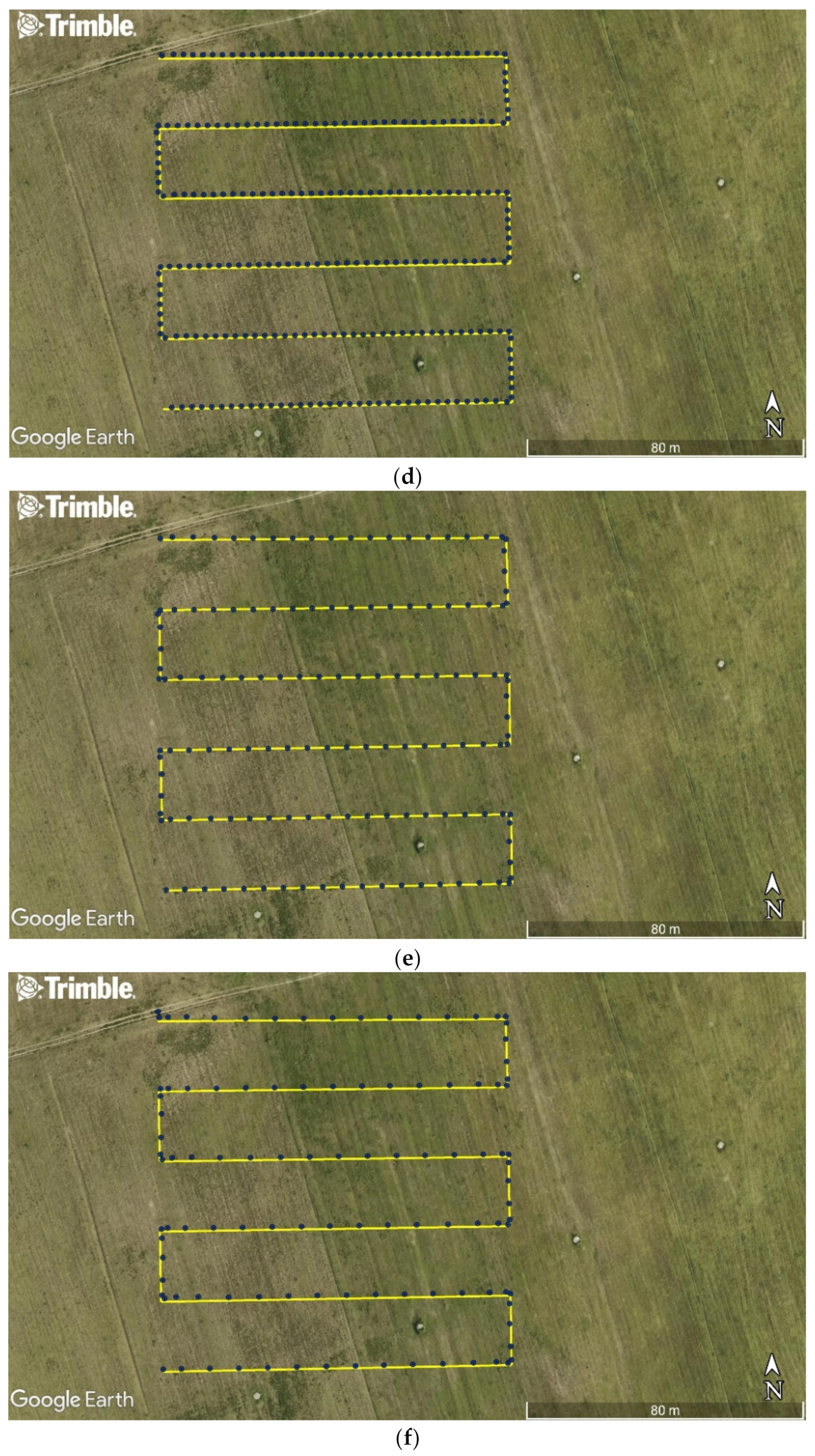
2.2. Photogrammetric Survey Planning and Performance
- oforward—longitudinal coverage of images (%),
- oside—transverse coverage of images (%),
- dforward—distance between successive images (m),
- dside—distance between flight profiles (m),
- f—camera focal length (mm),
- H—camera height above the ground surface (m),
- w—camera sensor width (mm) [50].

- GSD—field pixel size (cm/px),
- iW—image width (px).
2.3. Data Processing
- m0—scale factor (–),
- N—ellipsoid normal (radius of curvature perpendicular to the meridian) (m),
- S(B)—meridian arc length from the equator to the arbitrary latitude (B) (m),
- ΔL—distance between the point and the central meridian (rad),
- B,L—ellipsoidal coordinates of the point (°),
- L0—longitude of the central meridian (°),
- η—ellipse distortion orientation angle (−),
- e—first eccentricity (−).
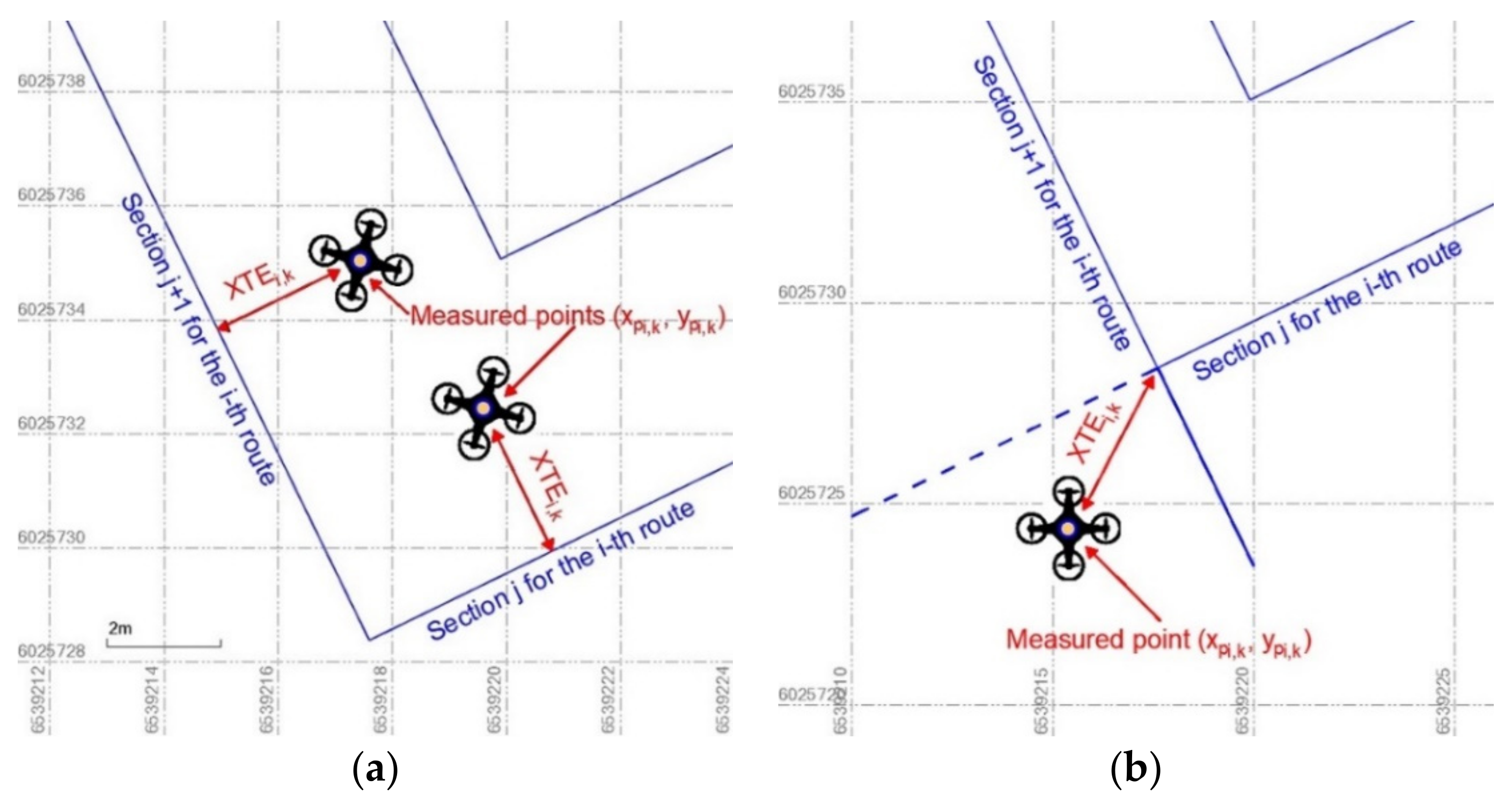
- i—route number (−),
- j—section number of the i-th route (−),
- xi,j, yi,j—flat coordinates of the point j recorded by a GNSS RTK receiver on the i-th route in the PL-2000 system (m),
- ai,j—slope of the straight line j for the i-th route, defined as follows (−):
- bi,j—y-intercept of the straight line j for the i-th route, defined as follows (m):
- k—point number recorded by a GNSS RTK receiver (−),
- —flat coordinates of the point k recorded by a GNSS RTK receiver on the i-th route in the PL-2000 system (m).

3. Results
- αg—gamma shape parameter (αg > 0) (−),
- βg—gamma scale parameter (βg > 0) (−),
- Γ(αg)—gamma function defined as follows (−):
- ΓXTE(αg)—incomplete gamma function defined as follows (−):
- αw—Weibull shape parameter (αw > 0) (−),
- βw—Weibull scale parameter (βw > 0) (−),
- γ—location parameter (XTE ≥ γ) (−).
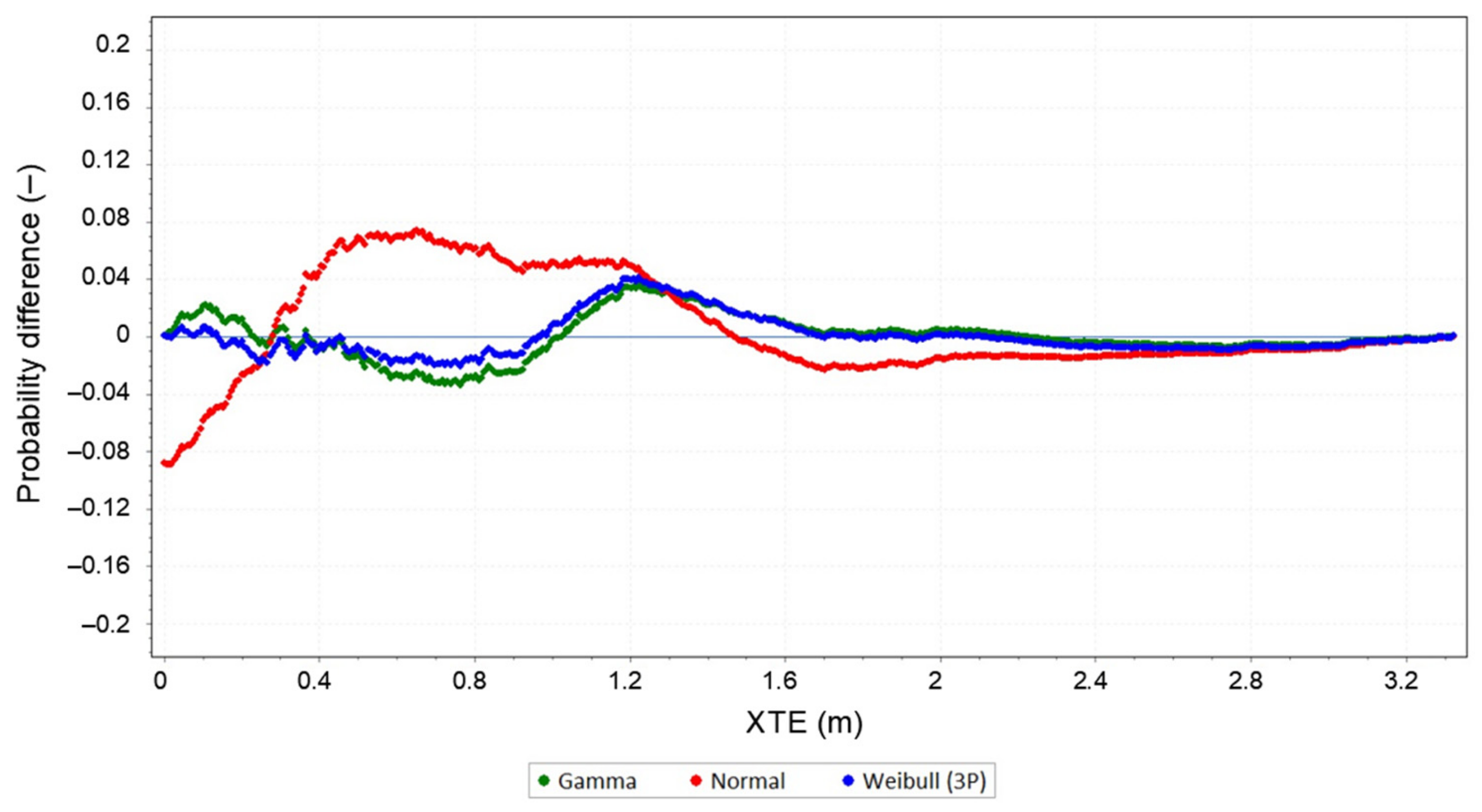
- p—probability of the XTE variable occurring in the population under study (−).
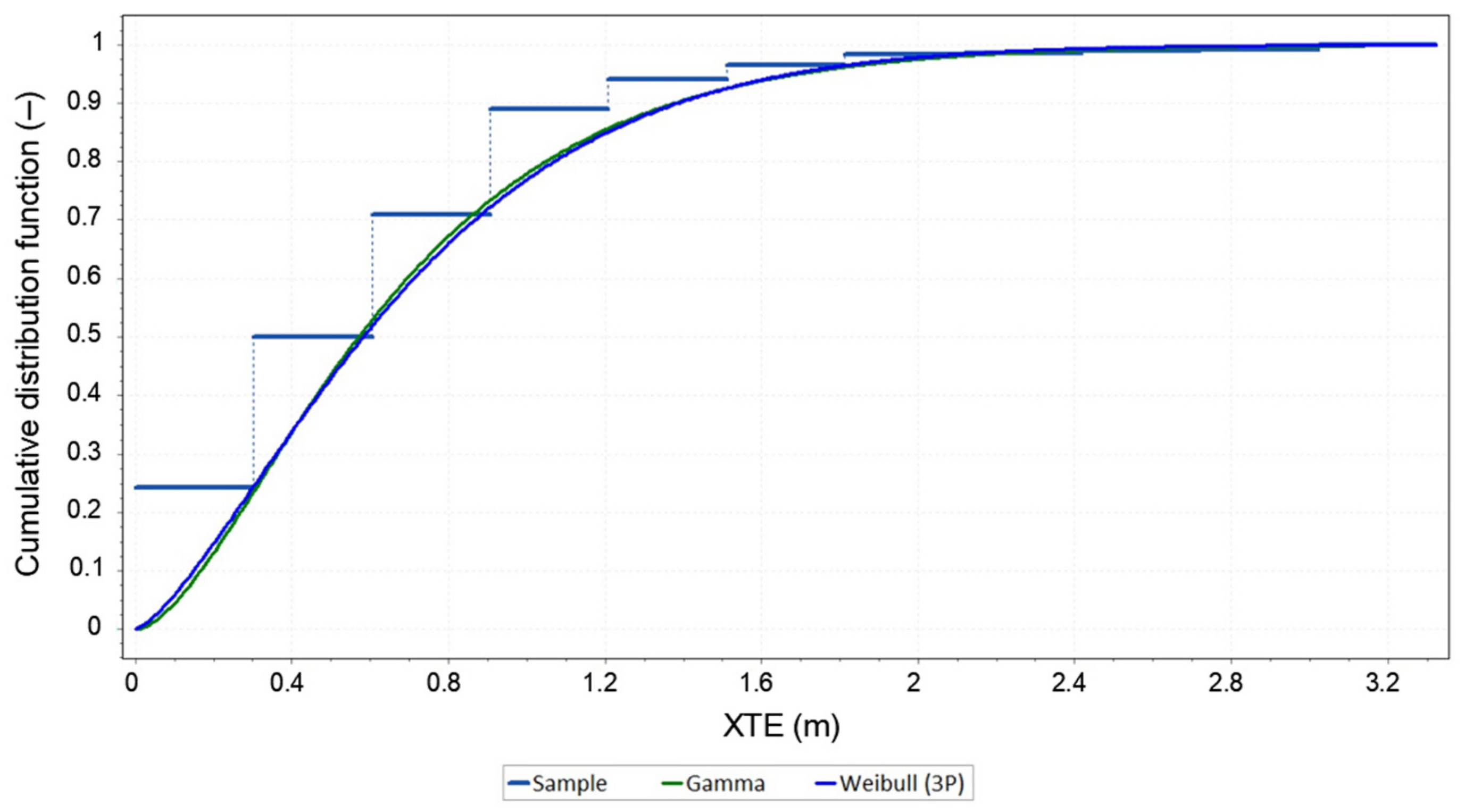
- Fn(XTE)—empirical CDF of the gamma distribution of the XTE variable (−),
- F(XTE)—theoretical CDF of the gamma distribution of the XTE variable (−),
- Gn(XTE)—empirical CDF of the Weibull (3P) distribution of the XTE variable (−),
- G(XTE)—theoretical CDF of the Weibull (3P) distribution of the XTE variable (−).
4. Discussion
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Gupta, S.G.; Ghonge, M.M.; Jawandhiya, P.M. Review of Unmanned Aircraft System (UAS). Int. J. Adv. Res. Comput. Sci. Eng. Inf. Technol. 2013, 2, 1646–1658. [Google Scholar] [CrossRef]
- Chamola, V.; Kotesh, P.; Agarwal, A.; Gupta, N.; Guizani, M. A Comprehensive Review of Unmanned Aerial Vehicle Attacks and Neutralization Techniques. Ad Hoc Netw. 2021, 111, 102324. [Google Scholar] [CrossRef] [PubMed]
- Nex, F.; Remondino, F. UAV for 3D Mapping Applications: A Review. Appl. Geomat. 2014, 6, 1–15. [Google Scholar] [CrossRef]
- Burdziakowski, P. Increasing the Geometrical and Interpretation Quality of Unmanned Aerial Vehicle Photogrammetry Products Using Super-resolution Algorithms. Remote Sens. 2020, 12, 810. [Google Scholar] [CrossRef] [Green Version]
- Frankenberger, J.R.; Huang, C.; Nouwakpo, K. Low-altitude Digital Photogrammetry Technique to Assess Ephemeral Gully Erosion. In Proceedings of the IEEE International Geoscience and Remote Sensing Symposium 2008 (IGARSS 2008), Boston, MA, USA, 6–11 July 2008. [Google Scholar]
- Hashim, K.A.; Ahmad, A.; Samad, A.M.; NizamTahar, K.; Udin, W.S. Integration of Low Altitude Aerial Terrestrial Photogrammetry Data in 3D Heritage Building Modeling. In Proceedings of the IEEE Control and System Graduate Research Colloquium 2012 (ICSGRC 2012), Shah Alam, Malaysia, 16–17 July 2012. [Google Scholar]
- Jizhou, W.; Zongjian, L.; Chengming, L. Reconstruction of Buildings from a Single UAV Image. In Proceedings of the International Society for Photogrammetry and Remote Sensing Congress 2004 (ISPRS 2004), Zurich, Switzerland, 6–12 September 2004. [Google Scholar]
- Saleri, R.; Cappellini, V.; Nony, N.; de Luca, L.; Pierrot-Deseilligny, M.; Bardiere, E.; Campi, M. UAV Photogrammetry for Archaeological Survey: The Theaters Area of Pompeii. In Proceedings of the Digital Heritage International Congress 2013 (Digital Heritage 2013), Marseille, France, 28 October–1 November 2013. [Google Scholar]
- Tariq, A.; Gillani, S.M.O.A.; Qureshi, H.K.; Haneef, I. Heritage Preservation Using Aerial Imagery from Light Weight Low Cost Unmanned Aerial Vehicle (UAV). In Proceedings of the International Conference on Communication Technologies 2017 (ICCT 2017), Guayaquil, Ecuador, 6–9 November 2017. [Google Scholar]
- Fernández, T.; Pérez, J.L.; Cardenal, J.; Gómez, J.M.; Colomo, C.; Delgado, J. Analysis of Landslide Evolution Affecting Olive Groves Using UAV and Photogrammetric Techniques. Remote Sens. 2016, 8, 837. [Google Scholar] [CrossRef] [Green Version]
- Mansoori, S.A.; Al-Ruzouq, R.; Dogom, D.A.; al Shamsi, M.; Mazzm, A.A.; Aburaed, N. Photogrammetric Techniques and UAV for Drainage Pattern and Overflow Assessment in Mountainous Terrains—Hatta/UAE. In Proceedings of the IEEE International Geoscience and Remote Sensing Symposium 2019 (IGARSS 2019), Yokohama, Japan, 28 July–2 August 2019. [Google Scholar]
- Nevalainen, O.; Honkavaara, E.; Tuominen, S.; Viljanen, N.; Hakala, T.; Yu, X.; Hyyppä, J.; Saari, H.; Pölönen, I.; Imai, N.N.; et al. Individual Tree Detection and Classification with UAV-based Photogrammetric Point Clouds and Hyperspectral Imaging. Remote Sens. 2017, 9, 185. [Google Scholar] [CrossRef] [Green Version]
- Song, Y.; Wang, J.; Shan, B. An Effective Leaf Area Index Estimation Method for Wheat from UAV-based Point Cloud Data. In Proceedings of the IEEE International Geoscience and Remote Sensing Symposium 2019 (IGARSS 2019), Yokohama, Japan, 28 July–2 August 2019. [Google Scholar]
- Tariq, A.; Osama, S.M.; Gillani, A. Development of a Low Cost and Light Weight UAV for Photogrammetry and Precision Land Mapping Using Aerial Imagery. In Proceedings of the International Conference on Frontiers of Information Technology 2016 (FIT 2016), Islamabad, Pakistan, 19–21 December 2016. [Google Scholar]
- Chou, T.-Y.; Yeh, M.-L.; Chen, Y.-C.; Chen, Y.-H. Disaster Monitoring and Management by the Unmanned Aerial Vehicle Technology. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. ISPRS Arch. 2010, 38, 137–142. [Google Scholar]
- Haarbrink, R.B.; Koers, E. Helicopter UAV for Photogrammetry and Rapid Response. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. ISPRS Arch. 2006, XXXVI-1/W44, 1–4. Available online: https://www.isprs.org/proceedings/xxxvi/1-W44/papers/Haarbrink_UAV_full.pdf (accessed on 8 August 2022).
- Mohd Daud, S.M.S.; Mohd Yusof, M.Y.P.; Heo, C.C.; Khoo, L.S.; Chainchel Singh, M.K.; Mahmood, M.S.; Nawawi, H. Applications of Drone in Disaster Management: A Scoping Review. Sci. Justice 2022, 62, 30–42. [Google Scholar] [CrossRef]
- Molina, P.; Colomina, I.; Vitoria, T.; Silva, P.F.; Skaloud, J.; Kornus, W.; Prades, R.; Aguilera, C. Searching Lost People with UAVs: The System and Results of the Close-search Project. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. ISPRS Arch. 2012, 39, 441–446. [Google Scholar] [CrossRef] [Green Version]
- Półka, M.; Ptak, S.; Kuziora, Ł. The Use of UAV’s for Search and Rescue Operations. Procedia Eng. 2017, 192, 748–752. [Google Scholar] [CrossRef]
- Hartmann, W.; Tilch, S.; Eisenbeiss, H.; Schindler, K. Determination of the UAV Position by Automatic Processing of Thermal Images. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2012, 39, 111–116. [Google Scholar] [CrossRef]
- Manyoky, M.; Theiler, P.; Steudler, D.; Eisenbeiss, H. Unmanned Aerial Vehicle in Cadastral Applications. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2011, 38, 57–62. [Google Scholar] [CrossRef] [Green Version]
- Agrafiotis, P.; Skarlatos, D.; Georgopoulos, A.; Karantzalos, K. Shallow Water Bathymetry Mapping from UAV Imagery Based on Machine Learning. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2019, XLII-2/W10, 9–16. [Google Scholar] [CrossRef] [Green Version]
- Burdziakowski, P.; Specht, C.; Dabrowski, P.S.; Specht, M.; Lewicka, O.; Makar, A. Using UAV Photogrammetry to Analyse Changes in the Coastal Zone Based on the Sopot Tombolo (Salient) Measurement Project. Sensors 2020, 20, 4000. [Google Scholar] [CrossRef]
- Nikolakopoulos, K.G.; Lampropoulou, P.; Fakiris, E.; Sardelianos, D.; Papatheodorou, G. Synergistic Use of UAV and USV Data and Petrographic Analyses for the Investigation of Beachrock Formations: A Case Study from Syros Island, Aegean Sea, Greece. Minerals 2018, 8, 534. [Google Scholar] [CrossRef] [Green Version]
- Zhang, C. An UAV-based Photogrammetric Mapping System for Road Condition Assessment. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2008, 37, 627–632. [Google Scholar]
- Berni, J.A.J.; Zarco-Tejada, P.J.; Suárez, L.; Fereres, E. Thermal and Narrowband Multispectral Remote Sensing for Vegetation Monitoring from an Unmanned Aerial Vehicle. Trans. Geosci. Remote Sens. 2009, 47, 722–738. [Google Scholar] [CrossRef] [Green Version]
- Feng, Q.; Liu, J.; Gong, J. UAV Remote Sensing for Urban Vegetation Mapping Using Random Forest and Texture Analysis. Remote Sens. 2015, 7, 1074–1094. [Google Scholar] [CrossRef] [Green Version]
- Grenzdörffer, G.J.; Engel, A.; Teichert, B. The Photogrammetric Potential of Low-cost UAVs in Forestry and Agriculture. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. ISPRS Arch. 2008, 37, 1207–1213. [Google Scholar]
- Torresan, C.; Berton, A.; Carotenuto, F.; di Gennaro, S.F.; Gioli, B.; Matese, A.; Miglietta, F.; Vagnoli, C.; Zaldei, A.; Wallace, L. Forestry Applications of UAVs in Europe: A Review. Int. J. Remote Sens. 2017, 38, 2427–2447. [Google Scholar] [CrossRef]
- Zhang, Y.; Wu, H.; Yang, W. Forests Growth Monitoring Based on Tree Canopy 3D Reconstruction Using UAV Aerial Photogrammetry. Forests 2019, 10, 1052. [Google Scholar] [CrossRef] [Green Version]
- Alioua, A.; Djeghri, H.-E.; Cherif, M.E.T.; Senouci, S.-M.; Sedjelmaci, H. UAVs for Traffic Monitoring: A Sequential Game-based Computation Offloading/Sharing Approach. Comput. Netw. 2020, 177, 107273. [Google Scholar] [CrossRef]
- Puri, A.; Valavanis, K.P.; Kontitsis, M. Statistical Profile Generation for Traffic Monitoring Using Real-time UAV Based Video Data. In Proceedings of the 15th Mediterranean Conference on Control & Automation (MED 2007), Athens, Greece, 27–29 June 2007. [Google Scholar]
- Ro, K.; Oh, J.-S.; Dong, L. Lessons Learned: Application of Small UAV for Urban Highway Traffic Monitoring. In Proceedings of the 45th AIAA Aerospace Sciences Meeting and Exhibit, Reno, NV, USA, 8–11 November 2007. [Google Scholar]
- Semsch, E.; Jakob, M.; Pavlicek, D.; Pechoucek, M. Autonomous UAV Surveillance in Complex Urban Environments. In Proceedings of the IEEE/WIC/ACM International Joint Conference on Web Intelligence and Intelligent Agent Technology 2009 (WI-IAT 2009), Washington, DC, USA, 15–18 September 2009. [Google Scholar]
- Tan, Y.; Li, Y. UAV Photogrammetry-based 3D Road Distress Detection. ISPRS Int. J. Geo. Inf. 2019, 8, 409. [Google Scholar] [CrossRef]
- Tomic, T.; Schmid, K.; Lutz, P.; Domel, A.; Kassecker, M.; Mair, E.; Grixa, I.; Ruess, F.; Suppa, M.; Burschka, D. Toward a Fully Autonomous UAV: Research Platform for Indoor and Outdoor Urban Search and Rescue. IEEE Robot. Autom. Mag. 2012, 19, 46–56. [Google Scholar] [CrossRef] [Green Version]
- Bhattacherjee, U.; Ozturk, E.; Ozdemir, O.; Guvenc, I.; Sichitiu, M.L.; Dai, H. Experimental Study of Outdoor UAV Localization and Tracking Using Passive RF Sensing. In Proceedings of the 15th ACM Workshop on Wireless Network Testbeds, Experimental Evaluation & Characterization (ACM WiNTECH 2021), New Orleans, LA, USA, 1 April 2022. [Google Scholar]
- Brunet, M.N.; Ribeiro, G.A.; Mahmoudian, N.; Rastgaar, M. Stereo Vision for Unmanned Aerial Vehicle Detection, Tracking, and Motion Control. In Proceedings of the 21st IFAC World Congress (IFAC-V 2020), Berlin, Germany, 11–17 July 2020. [Google Scholar]
- Furrer, F.; Burri, M.; Achtelik, M.; Siegwart, R. RotorS—A Modular Gazebo MAV Simulator Framework. In Robot Operating System (ROS). Studies in Computational Intelligence; Koubaa, A., Ed.; Springer: Cham, Switzerland, 2016; Volume 625, pp. 595–625. [Google Scholar]
- Connor, D.; Martin, P.; Hutson, C.; Pullin, H.; Smith, N.; Scott, T. The Use of Unmanned Aerial Vehicles for Rapid and Repeatable 3D Radiological Site Characterization-18352. In Proceedings of the 44th Annual Waste Management Conference (WM 2018), Phoenix, AZ, USA, 18–22 March 2018. [Google Scholar]
- Goel, S.; Kealy, A.; Lohani, B. Development and Experimental Evaluation of a Low-cost Cooperative UAV Localization Network Prototype. J. Sens. Actuator Netw. 2018, 7, 42. [Google Scholar] [CrossRef] [Green Version]
- Nemra, A.; Aouf, N. Robust INS/GPS Sensor Fusion for UAV Localization Using SDRE Nonlinear Filtering. IEEE Sens. J. 2010, 10, 789–798. [Google Scholar] [CrossRef] [Green Version]
- Paraforos, D.S.; Sharipov, G.M.; Heiß, A.; Griepentrog, H.W. Position Accuracy Assessment of a UAV-mounted Sequoia+ Multispectral Camera Using a Robotic Total Station. Agriculture 2022, 12, 885. [Google Scholar] [CrossRef]
- Shah, M.Z.; Samar, R.; Bhatti, A.I. Cross-track Control of UAVs During Circular and Straight Path Following Using Sliding Mode Approach. In Proceedings of the 12th International Conference on Control, Automation and Systems, Jeju, South Korea, 17–21 October 2012. [Google Scholar]
- Vílez, P.; Certad, N.; Ruiz, E. Trajectory Generation and Tracking Using the AR. Drone 2.0 Quadcopter UAV. In Proceedings of the 12th Latin American Robotics Symposium and 3rd Brazilian Symposium on Robotics (LARS-SBR 2015), Uberlandia, Brazil, 29–31 October 2015. [Google Scholar]
- Yang, M.; Zhou, Z.; You, X. Research on Trajectory Tracking Control of Inspection UAV Based on Real-time Sensor Data. Sensors 2022, 22, 3648. [Google Scholar] [CrossRef]
- Yang, Y.; Liu, X.; Zhang, W.; Liu, X.; Guo, Y. A Nonlinear Double Model for Multisensor-integrated Navigation Using the Federated EKF Algorithm for Small UAVs. Sensors 2020, 20, 2974. [Google Scholar] [CrossRef]
- Goodbody, T.R.H.; Coops, N.C.; White, J.C. Digital Aerial Photogrammetry for Updating Area-based Forest Inventories: A Review of Opportunities, Challenges, and Future Directions. Curr. For. Rep. 2019, 5, 55–75. [Google Scholar] [CrossRef] [Green Version]
- Seifert, E.; Seifert, S.; Vogt, H.; Drew, D.; van Aardt, J.; Kunneke, A.; Seifert, T. Influence of Drone Altitude, Image Overlap, and Optical Sensor Resolution on Multi-view Reconstruction of Forest Images. Remote Sens. 2019, 11, 1252. [Google Scholar] [CrossRef] [Green Version]
- Falkner, E.; Morgan, D. Aerial Mapping: Methods and Applications, 2nd ed.; CRC Press: Boca Raton, FL, USA, 2002. [Google Scholar]
- Jiménez-Jiménez, S.I.; Ojeda-Bustamante, W.; Marcial-Pablo, M.d.J.; Enciso, J. Digital Terrain Models Generated with Low-cost UAV Photogrammetry: Methodology and Accuracy. ISPRS Int. J. Geo. Inf. 2021, 10, 285. [Google Scholar] [CrossRef]
- Tiwari, A.; Sharma, S.K.; Dixit, A.; Mishra, V. UAV Remote Sensing for Campus Monitoring: A Comparative Evaluation of Nearest Neighbor and Rule-based Classification. J. Indian Soc. Remote Sens. 2021, 49, 527–539. [Google Scholar] [CrossRef]
- Grayson, B.; Penna, N.T.; Mills, J.P.; Grant, D.S. GPS Precise Point Positioning for UAV Photogrammetry. Photogramm. Rec. 2018, 33, 427–447. [Google Scholar] [CrossRef] [Green Version]
- Luis-Ruiz, J.M.d.; Sedano-Cibrián, J.; Pereda-García, R.; Pérez-Álvarez, R.; Malagón-Picón, B. Optimization of Photogrammetric Flights with UAVs for the Metric Virtualization of Archaeological Sites. Application to Juliobriga (Cantabria, Spain). Appl. Sci. 2021, 11, 1204. [Google Scholar] [CrossRef]
- Suziedelyte Visockiene, J.; Puziene, R.; Stanionis, A.; Tumeliene, E. Unmanned Aerial Vehicles for Photogrammetry: Analysis of Orthophoto Images over the Territory of Lithuania. Int. J. Aerosp. Eng. 2016, 2016, 4141037. [Google Scholar] [CrossRef] [Green Version]
- Vautherin, J.; Rutishauser, S.; Schneider-Zapp, K.; Choi, H.F.; Chovancova, V.; Glass, A.; Strecha, C. Photogrammetric Accuracy and Modeling of Rolling Shutter Cameras. ISPRS Ann. Photogramm. Remote Sens. Spatial Inf. Sci. 2016, 3, 139–146. [Google Scholar] [CrossRef] [Green Version]
- Abou Chakra, C.; Somma, J.; Gascoin, S.; Fanise, P.; Drapeau, L. Impact of Flight Altitude on Unmanned Aerial Photogrammetric Survey of the Snow Height on Mount Lebanon. Int. Arch. Photogramm. Remote Sens. Spatial Inf. Sci. 2020, 43, 119–125. [Google Scholar] [CrossRef]
- Kameyama, S.; Sugiura, K. Estimating Tree Height and Volume Using Unmanned Aerial Vehicle Photography and SfM Technology, with Verification of Result Accuracy. Drones 2020, 4, 19. [Google Scholar] [CrossRef]
- Casado Magaña, E.J. Trajectory Prediction Uncertainty Modelling for Air Traffic Management. Ph.D. Thesis, University of Glasgow, Glasgow, Scotland, 2016. [Google Scholar]
- Marchel, Ł.; Specht, C.; Specht, M. Assessment of the Steering Precision of a Hydrographic USV along Sounding Profiles Using a High-precision GNSS RTK Receiver Supported Autopilot. Energies 2020, 13, 5637. [Google Scholar] [CrossRef]
- Specht, M.; Specht, C.; Lasota, H.; Cywiński, P. Assessment of the Steering Precision of a Hydrographic Unmanned Surface Vessel (USV) along Sounding Profiles Using a Low-cost Multi-Global Navigation Satellite System (GNSS) Receiver Supported Autopilot. Sensors 2019, 19, 3939. [Google Scholar] [CrossRef] [Green Version]
- Council of Ministers of the Republic of Poland. Ordinance of the Council of Ministers of 15 October 2012 on the National Spatial Reference System; Council of Ministers of the Republic of Poland: Warsaw, Poland, 2012. (In Polish)
- Hofmann-Wellenhof, B.; Lichtenegger, H.; Collins, J. Global Positioning System: Theory and Practice; Springer: New York, NY, USA, 1994. [Google Scholar]
- Rounsaville, J.; Dvorak, J.; Stombaugh, T. Methods for Calculating Relative Cross-Track Error for ASABE/ISO Standard 12188-2 from Discrete Measurements. Trans. ASABE 2016, 59, 1609–1616. [Google Scholar]
- Anderson, T.W.; Darling, D.A. A Test of Goodness of Fit. J. Am. Stat. Assoc. 1954, 49, 765–769. [Google Scholar] [CrossRef]
- Kolmogorov, A. Sulla Determinazione Empirica di una Legge di Distribuzione. G. Ist. Ital. Attuari 1933, 4, 83–91. (In Italian) [Google Scholar]
- Pearson, K. On the Criterion that a Given System of Deviations from the Probable in the Case of a Correlated System of Variables is Such that it Can be Reasonably Supposed to have Arisen from Random Sampling. Lond. Edinb. Dublin Philos. Mag. J. Sci. 1900, 50, 157–175. [Google Scholar] [CrossRef]
- Smirnov, N. Table for Estimating the Goodness of Fit of Empirical Distributions. Ann. Math. Stat. 2007, 19, 279–281. [Google Scholar] [CrossRef]
- Specht, M. Consistency Analysis of Global Positioning System Position Errors with Typical Statistical Distributions. J. Navig. 2021, 74, 1201–1218. [Google Scholar] [CrossRef]
- Specht, M. Consistency of the Empirical Distributions of Navigation Positioning System Errors with Theoretical Distributions—Comparative Analysis of the DGPS and EGNOS Systems in the Years 2006 and 2014. Sensors 2021, 21, 31. [Google Scholar] [CrossRef]
- Specht, M. Determination of Navigation System Positioning Accuracy Using the Reliability Method Based on Real Measurements. Remote Sens. 2021, 13, 4424. [Google Scholar] [CrossRef]
- Specht, M. Experimental Studies on the Relationship Between HDOP and Position Error in the GPS System. Metrol. Meas. Syst. 2022, 29, 17–36. [Google Scholar]
- Davis, P.J. Leonhard Euler’s Integral: A Historical Profile of the Gamma Function. Amer. Math. Monthly 1959, 66, 849–869. [Google Scholar] [CrossRef]
- NIST. 1.3.6.6.11. Gamma Distribution. Available online: https://www.itl.nist.gov/div898/handbook/eda/section3/eda366b.htm (accessed on 8 August 2022).
- NIST. 1.3.6.6.8. Weibull Distribution. Available online: https://www.itl.nist.gov/div898/handbook/eda/section3/eda3668.htm (accessed on 8 August 2022).
- Weibull, W. A Statistical Distribution Function of Wide Applicability. J. Appl. Mech. 1951, 18, 293–297. [Google Scholar] [CrossRef]
- Ayamga, M.; Akaba, S.; Apotele Nyaaba, A. Multifaceted Applicability of UAVs: A Review. Technol. Forecast. Soc. Change 2021, 167, 120677. [Google Scholar] [CrossRef]
- He, D.; Liu, H.; Chan, S.; Guizani, M. How to Govern the Non-cooperative Amateur UAVs? IEEE Netw. 2019, 33, 184–189. [Google Scholar] [CrossRef]
- Schenkelberg, F. How Reliable Does a Delivery UAV Have to Be? In Proceedings of the 2016 Annual Reliability and Maintainability Symposium (RAMS 2016), Tucson, AZ, USA, 25–28 January 2016. [Google Scholar]
- Balestrieri, E.; Daponte, P.; De Vito, L.; Picariello, F.; Tudosa, I. Sensors and Measurements for UAV Safety: An Overview. Sensors 2021, 21, 8253. [Google Scholar] [CrossRef]
- Huang, M.; Ochieng, W.Y.; Escribano Macias, J.J.; Ding, Y. Accuracy Evaluation of a New Generic Trajectory Prediction Model for Unmanned Aerial Vehicles. Aerosp. Sci. Technol. 2021, 119, 107160. [Google Scholar] [CrossRef]
- Mondoloni, S.; Swierstra, S.; Paglione, M. Assessing Trajectory Prediction Performance-Metrics Definition. In Proceedings of the 24th Digital Avionics Systems Conference (DASC 2005), Washington, DC, USA, 30 October–3 November 2005. [Google Scholar]
- Warren, A. Trajectory Prediction Concepts for Next Generation Air Traffic Management. In Proceedings of the 3rd USA/Europe Air Traffic Management Research and Development Seminar (ATM R&D 2000), Napoli, Italy, 13–16 June 2000. [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Technical Data | DJI Phantom 4 RTK Drone | Photo |
|---|---|---|
| Takeoff weight | 1391 g |  |
| Max service ceiling ASL | 6000 m | |
| Max ascent speed | 5–6 m/s | |
| Max descent speed | 3 m/s | |
| Max speed | 50–58 km/h | |
| Max flight time | 30 min | |
| Mapping accuracy | Mapping accuracy meets the requirements of the ASPRS Accuracy Standards for Digital Orthophotos Class Ⅲ | |
| GSD | (H/36.5) (cm/px), H—aircraft altitude relative to shooting scene (m) | |
| Data acquisition efficiency | Max operating area of approx. 1 km2 for a single flight |
| Technical Data | DJI Camera | Photo |
|---|---|---|
| Sensor | 1″ CMOS, 20 Mpx |  |
| Lens | FOV: 84° Focal length: 8.8 mm/24 mm Aperture width: f/2.8–f/11 Sharpness: 1 m–∞ | |
| ISO range | 100–12,800 | |
| Electronic shutter speed | 8–1/8000 s | |
| Max image size | 4864 × 3648 (4:3) or 5472 × 3648 (3:2) | |
| Photo format | JPEG | |
| Data recording | MicroSD 128 GB |
| Accuracy Measure | Parallel Profiles Distant from Each Other by 10 m | ||
|---|---|---|---|
| V = 10 km/h | V = 20 km/h | V = 30 km/h | |
| Time period | 11:12:46–11:19:55 | 13:53:49–13:57:49 | 10:56:31–10:59:37 |
| Number of measurements | 430 | 241 | 187 |
| XTE68 | 0.44 m | 3.94 m | 0.70 m |
| XTE95 | 0.60 m | 4.17 m | 1.09 m |
| Accuracy Measure | Parallel Profiles Distant from Each Other by 20 m | ||
|---|---|---|---|
| V = 10 km/h | V = 20 km/h | V = 30 km/h | |
| Time period | 10:28:32–10:32:41 | 10:46:29–10:48:46 | 10:18:28–10:20:17 |
| Number of measurements | 250 | 138 | 110 |
| XTE68 | 1.00 m | 0.39 m | 0.93 m |
| XTE95 | 1.22 m | 0.65 m | 1.18 m |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lewicka, O.; Specht, M.; Specht, C. Assessment of the Steering Precision of a UAV along the Flight Profiles Using a GNSS RTK Receiver. Remote Sens. 2022, 14, 6127. https://doi.org/10.3390/rs14236127
Lewicka O, Specht M, Specht C. Assessment of the Steering Precision of a UAV along the Flight Profiles Using a GNSS RTK Receiver. Remote Sensing. 2022; 14(23):6127. https://doi.org/10.3390/rs14236127
Chicago/Turabian StyleLewicka, Oktawia, Mariusz Specht, and Cezary Specht. 2022. "Assessment of the Steering Precision of a UAV along the Flight Profiles Using a GNSS RTK Receiver" Remote Sensing 14, no. 23: 6127. https://doi.org/10.3390/rs14236127
APA StyleLewicka, O., Specht, M., & Specht, C. (2022). Assessment of the Steering Precision of a UAV along the Flight Profiles Using a GNSS RTK Receiver. Remote Sensing, 14(23), 6127. https://doi.org/10.3390/rs14236127