1. Introduction
Geomagnetic storms are disturbances in the Earth magnetosphere caused by enhancements in the solar wind by coronal mass ejections (CMEs) or high-speed solar-winds streams (HSS) [
1,
2,
3]. Interactions of HSS with quiet-time solar wind cause corotating interaction regions (CIRs) [
1] which cause geomagnetic storms. Coronal mass injections result from reconfigurations of the solar coronal magnetic field and injection of a magnetic cloud into the interplanetary fields. HSS originate from the coronal holes, where solar wind can escape more easily because of the Sun’s open magnetic field caused by temporary cooler, less dense regions [
4]. During the declining phase of the solar cycle, coronal holes occur at lower latitudes and cause more frequent CIRs that can hit the Earth. CMEs have, in general, a higher occurrence during solar maximum [
5] while some of the strongest CMEs have been, in fact, observed during the declining phase of the solar cycle. Geomagnetic storms can result in changes in the Earth’s magnetosphere which is two-way coupled to the ionosphere and can produce ionospheric disturbances due to electromagnetic flux heating and the precipitation of particles into the ionosphere. Total electron content (TEC) describes the line-of-sight number of charged particles in the ionosphere, and an increase in TEC corresponds to increasing propagation delays for transionospheric signals. The TEC can be represented by TEC units (TECU), where 1 TECU stands for 10
16 free electrons/m
2. The dispersive property of the ionosphere can be used to correct for the ionospheric delay by combining two or more frequencies. Single-frequency users, however, are not able to use multiple frequencies and need ionospheric models or external information to correct for this propagation effect [
6,
7,
8]. Higher electron densities cause higher atmospheric drag on low orbiting satellites [
9,
10] and longer delays on Global Navigation Satellite Systems’ (GNSS) radio signals, which are used for navigation and other GNSS applications. Predicting TEC accurately during these space weather events is a challenging task, because during geomagnetic storms the TEC can dramatically change compared to the quiet-time conditions.
To show an example of how much the ionospheric TEC can be disturbed during a geomagnetic storm, the TEC relative to the 27-day median prior to the event (referred to as the relative TEC) can be used. The relative TEC is plotted in
Figure 1 for the Halloween storms that occurred on 29 and 30 October 2003. The relative TEC is computed using the global ionosphere maps (GIMs) from the Universitat Politècnica de Catalunya (UPC) analysis center, downloaded from
ftp://newg1.upc.es/upc_ionex/ (accessed on 8 May 2022). In this figure, we see that at certain locations the TEC can increase by more than 200% compared to the preceding 27-day median. Storms do not have to be short-lived phenomena but can have a duration that can last a few hours up to several days [
11]. Therefore, it is important to predict ionospheric TEC accurately during disturbed periods as well.
There are neural-network (NN)-based approaches that also investigate the performance of TEC models during storm-time conditions. An NN-based TEC model, trained with data from a Peninsular Malaysia station from the years 2011 to 2014, was used by Akir et al. [
12]. The performance of the TEC model was investigated during two geomagnetic storms in 2015. The study indicated that during major geomagnetic storms, the NN TEC model is unable to accurately predict the TEC. The model developed by Akir et al. [
12] did not include any of the geomagnetic indices such as Kp, Hp, AE or Dst as input parameters. The Dst index describes the disturbance produced by the asymmetric ring current at low latitudes and the planetary Kp index measures global geomagnetic activity and is inferred from 13 mid-latitude stations. The NN storm-time TEC model over Sutherland, South Africa proposed by Uwamahoro and Habarulema [
13] used the geomagnetic input parameter called A, which stands for the daily average level of geomagnetic activity. The model was trained with storm data from 1999 to 2013 and was not able to capture short-term storm features but could accurately predict storms with non-significant ionospheric TEC response and storms that occurred during low-solar-activity (LSA) conditions. The authors of [
14] investigated the performance of the Nigerian total electron content (NIGTEC) regional NN-based model during two intense geomagnetic storms in March 2012 and 2013. NIGTEC used the disturbance index Dst as one of its input parameters and was able to capture the morphology of vertical TEC (VTEC) enhancement during the storm but not all storm-time related changes. The performance of several different long short-term memory (LSTM) network-based algorithms for global TEC predictions was investigated by Chen et al. [
15]. The authors found that the multi-step-auxiliary-algorithm-based prediction model performed the best. The performance of the model was further validated with four geomagnetic storm events during 2020 (LSA conditions) and showed that the model has low error during a geomagnetic storm. A combination of LSTM, convolutional neural network (CNN) and attention mechanism for an ionospheric forecast model in China was used by Tang et al. [
16]. The authors used the Dst, Kp and the magnetic-field southward component Bz as one of the input parameters. The network was tested with data from 2018, which was also a relatively quiet solar period (with an average F10.7 of 69.9 solar flux units).
The various NN-based approaches listed above use different algorithms for their storm-time TEC investigations. During our previous investigations in [
17], we found that our FNN-based quiet-time model, developed at the German Aerospace Center (DLR), was capable of showing the small-scale nighttime winter anomaly feature of the ionosphere. The performance of the model deteriorates during storm time; this was also expected since the model does not include any geomagnetic indices as input parameters. Due to the model’s capability of providing predictions containing small-scale features of the ionosphere, the same algorithm was chosen to be used but now focused on storm-time conditions. The models discussed above predict the TEC directly but for the current study another method was chosen. Our work focuses on the prediction of TEC during storm time relative to the 27-day median of the preceding days, from now on referred to as the relative TEC. Predicting the relative TEC instead of the TEC directly, the model’s capability of capturing storm-related perturbations can be seen. The model can be applied using different data sources as well, which will be further explained in the Methods section. In this paper, an FNN model is proposed to predict the relative TEC for the European region (with longitudes 30°W–50°E and latitudes 32.5°N–70°N). The relative TEC is computed using TEC data from GIMs. There are eight Ionospheric Associate Analysis Centers (IAACs) under the International GNSS Service (IGS) that develop the GIMs [
18,
19]. The GIMs are provided in the ionosphere map exchange (IONEX) format. For this work, rapid UQRG GIMs are used, which have a 15-minute temporal resolution, released by the UPC analysis center. The spatial resolution is 5 degrees longitude by 2.5 degrees latitude. The UQRG GIMs are released with a one-day latency. The high temporal resolution makes these GIMs ideal to be used during storm events to capture small-scale storm-related changes.
The paper is divided into five sections, beginning with a brief description of different NN-based ionospheric TEC models and their capability of predicting TEC accurately during storms.
Section 2 explains the database and sources needed for the model development. The method used for designing the storm-time NN-based model’s architecture is discussed in
Section 3.
Section 4 provides a performance evaluation of the storm-time NN model compared to an NN-based quiet-time model [
17] and the Neustrelitz TEC model (NTCM) [
20], which is a computationally very fast 12-coefficient model that uses the daily solar flux F10.7 as a driving parameter. The storm-time NN-based model is further evaluated with respect to its capability of predicting TEC using the quiet-time model outputs as an input for the storm-time model in order to improve the quiet-time model’s accuracy. The conclusions are given in
Section 5.
2. Database
A storm dataset was needed for this study in order to train and test the model. The dataset contains storms occurring in the time period from 1998 until 2020. The geomagnetic storm-time disturbance index Dst was used to detect storms because it is, according to Wanliss and Showalter, “the most widely used statistical descriptor of space storm activity” [
21] and commonly used for storm classifications. In
Figure 2, the Dst and SYM-H index, which can be used as a high-resolution Dst index [
21], are plotted during a storm that occurred 7–10 December 2013. According to Gonzalez et al. [
22], storms can be classified as follows: −50 ≤ Dst ≤ −30 as weak, −100 ≤ Dst ≤ −50 as moderate and Dst ≤ −100 as intense storms. In our study, we classified occurrences as storms if the Dst became lower than −50 nanotesla (nT). The onset time (storm time = 0) was defined as the time of maximum Dst right before the index started decreasing [
23], shown as the dashed black line in
Figure 2.
It is worth noting that the storm onset of magnetic storms is characterized by increases in magnetic field strength, sudden impulses (SIs) and storm sudden commencements (SSCs). Therefore, the true onset of the magnetic storm in
Figure 2 is the rise time before the “ST = 0”. However, for simplicity, we considered the onset as the time of maximum Dst before the decreasing Dst values [
23]. We assume that since we are using TEC data of either 15-min or 1-h time resolutions, the difference in true onset and considered onset will not impact the TEC modelling performance.
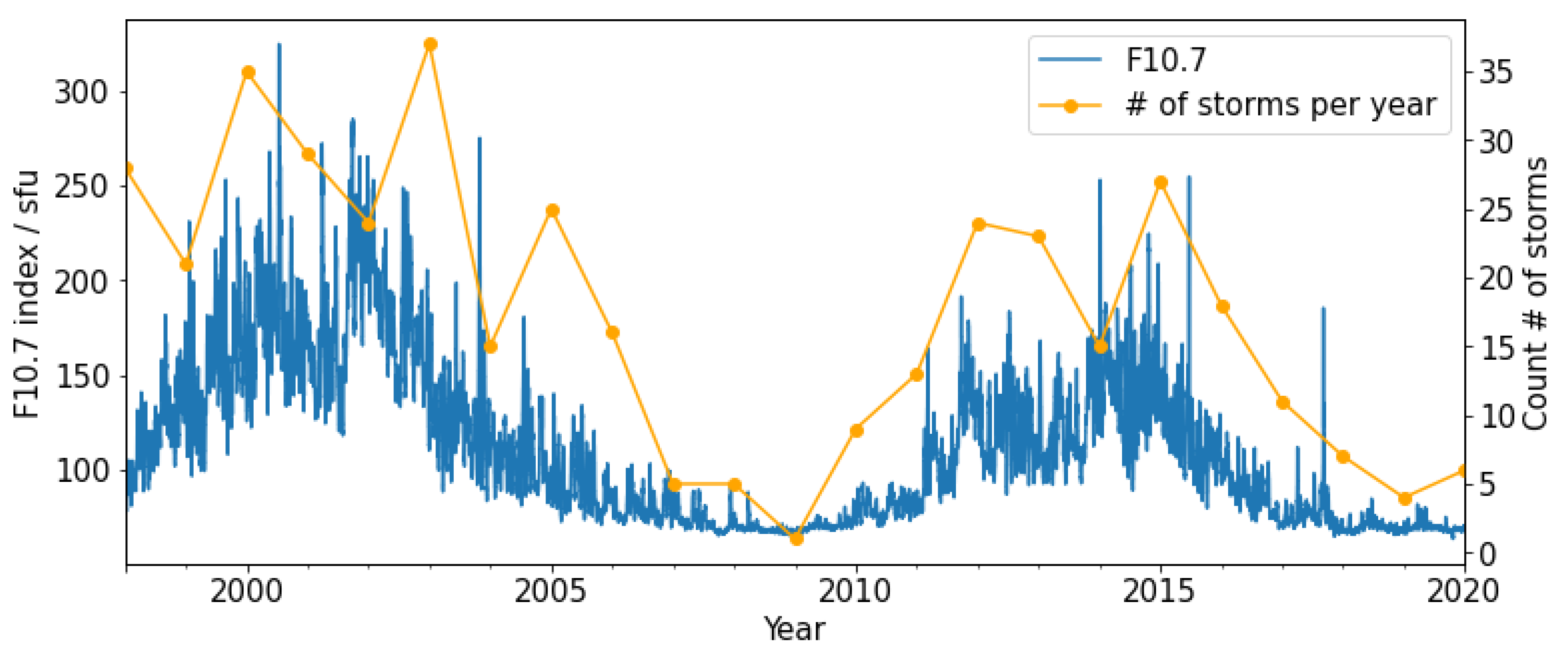
In total, there were 398 storms identified during the investigated time period. Most storms occurred during high-solar-activity (HSA) periods, as shown below in
Figure 3, where the daily solar flux F10.7 is plotted together with the number of storms for each year.
We used the relative TEC in order to analyse and model storm-related perturbations, defined in the Equation (
1) below.
In some cases, the median TEC was zero; here, we decided to calculate the relative TEC by substituting the median using a nominal value. The nominal value is 1 TECU during daytime, which is from 6 until 18 universal time (UT), and 0.5 TECU during nighttime, this way, a division by zero is prevented. The nominal values are assumed from our long-term experiences on TEC reconstruction and modelling [
20,
24,
25,
26]. The storms were divided into seasons according to their day of year (DOY). This is shown in
Table 1, below, together with the number of storms for each season. The DOY used to classify the storms into seasons, listed in
Table 1, corresponds to the following months: winter season storms occurred from November until February, summer storms from May until August and equinox storms during March, April, September and October.
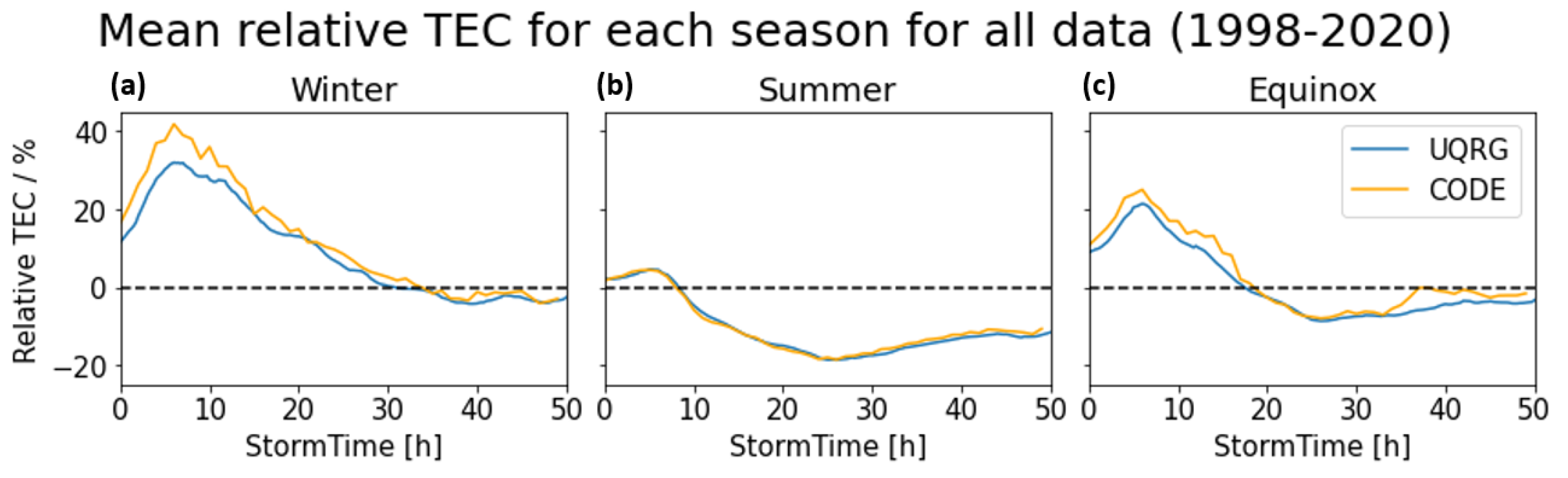
In
Figure 4, the relative TEC as a function of storm time (averaged over the complete region) is plotted during each season for UQRG data from UPC and data from the Center for Orbit Determination in Europe (CODE) analysis center. A comparison with data from CODE was made in order to see if the same storm-related perturbations are visible in both datasets. In general, the relative TEC for CODE and UQRG data is very similar but for the winter and equinox storms, a small increase at the beginning of the storm is seen for the CODE relative TEC. This can be partially explained by the differences in temporal resolution between the GIMs, which can result in more extreme peaks because there are fewer data points. However, this does not justify why it only occurs within the positive relative TEC phases and is not seen during summer storms, where negative phases are stronger. From the plots in
Figure 4, a strong positive phase (i.e., TEC increase relative to 27-day median) during winter storms can be seen where the summer storms have a negative phase. The equinox storms look like a mixture of the other two seasons. A seasonal effect was also found in [
23,
27,
28,
29], where during winter storms the positive phase of TEC is dominant and during summer the decreasing effect is dominant.
The rapid UQRG GIMs provided by UPC were downloaded from
ftp://newg1.upc.es/upc_ionex/ (accessed on 8 May 2022). The geomagnetic conditions are described by the global storm index also known as disturbance index SYM-H and the geomagnetic activity index Hp30. The SYM-H index was chosen instead of the disturbance index Dst as an input parameter because it has a 1-minute time resolution [
21]. SYM-H was downloaded from
http://wdc.kugi.kyoto-u.ac.jp/aeasy/index.html (accessed on 10 March 2022). The high-cadence Hp30 index is a high-resolution Kp index [
30,
31] and can be accessed at
https://www.gfz-potsdam.de/en/hpo-index/ (accessed on 10 March 2022). The Hp30 has a 30-min time resolution, whereas the Kp index has a 3-h time resolution. Both SYM-H and Hp30 indices have been linearly interpolated to a time resolution of 15 min, equal to the UQRG GIMs.
3. Method
In case of the NN-based quiet-time model [
17], the DOY, UT, geomagnetic latitude, geographic longitude, solar zenith angle and solar radio flux index F10.7 were used as input parameters. Studies [
13,
14,
15,
16] have shown that other NN-based models considered geomagnetic indices as inputs as well. Therefore, for the storm-time model, we considered the same input parameters as the quiet-time model (except for the geomagnetic latitude and the solar zenith angle) together with new inputs such as the storm time (where the storm time = 0 corresponds to the time of maximum Dst right before the Dst starts decreasing), 27-day median TEC of the preceding days and the geomagnetic indices SYM-H and Hp30. Including the storm time as an input parameter, the model could capture the timing of the positive or negative relative TEC phases of the storms better. Since, during this study, the rapid UQRG GIMs were used, there is a latency of one day before the GIMs become available. Therefore, the 27-day median can be computed without complications in the lag time of the release of the GIMs. Adding the solar zenith angle as an input did not improve the accuracy of the model and, therefore, it was not included. The solar zenith angle does not change very much because the model is limited to the European region. This is also the reason why the geographic latitude was used instead of the geomagnetic latitude. Other indices besides the Hp30 and SYM-H, e.g., Bz component of planetary magnetic field, solar-wind flow speed, solar-wind pressure and proton density were also investigated to check whether they would improve the accuracy of the model or not. The indices were downloaded from the OMNIWeb interface, available at
https://omniweb.gsfc.nasa.gov/form/dx1.html (accessed on 10 March 2022). Using the Bz, solar-wind flow speed, solar-wind pressure and proton density as input parameters did not improve the accuracy of the network. The temporal resolution of these parameters provided by the OMNIWeb database is 1-h, which may not be sufficient to describe the small-scale perturbations seen in the relative TEC computed with the UQRG GIMs, which have a temporal resolution of 15-min. Finally, the following inputs were selected to train the neural network with: SYM-H, Hp30, DOY, UT, storm time, solar flux index F10.7 and the 27-day median TEC of the preceding days. The features and the correct set of hyperparameters were selected by training different models and comparing the training and validation loss and accuracy. Future selection may be also performed in an automated way using various machine-learning methods such as random forests, mutual information or fast function extraction [
32].
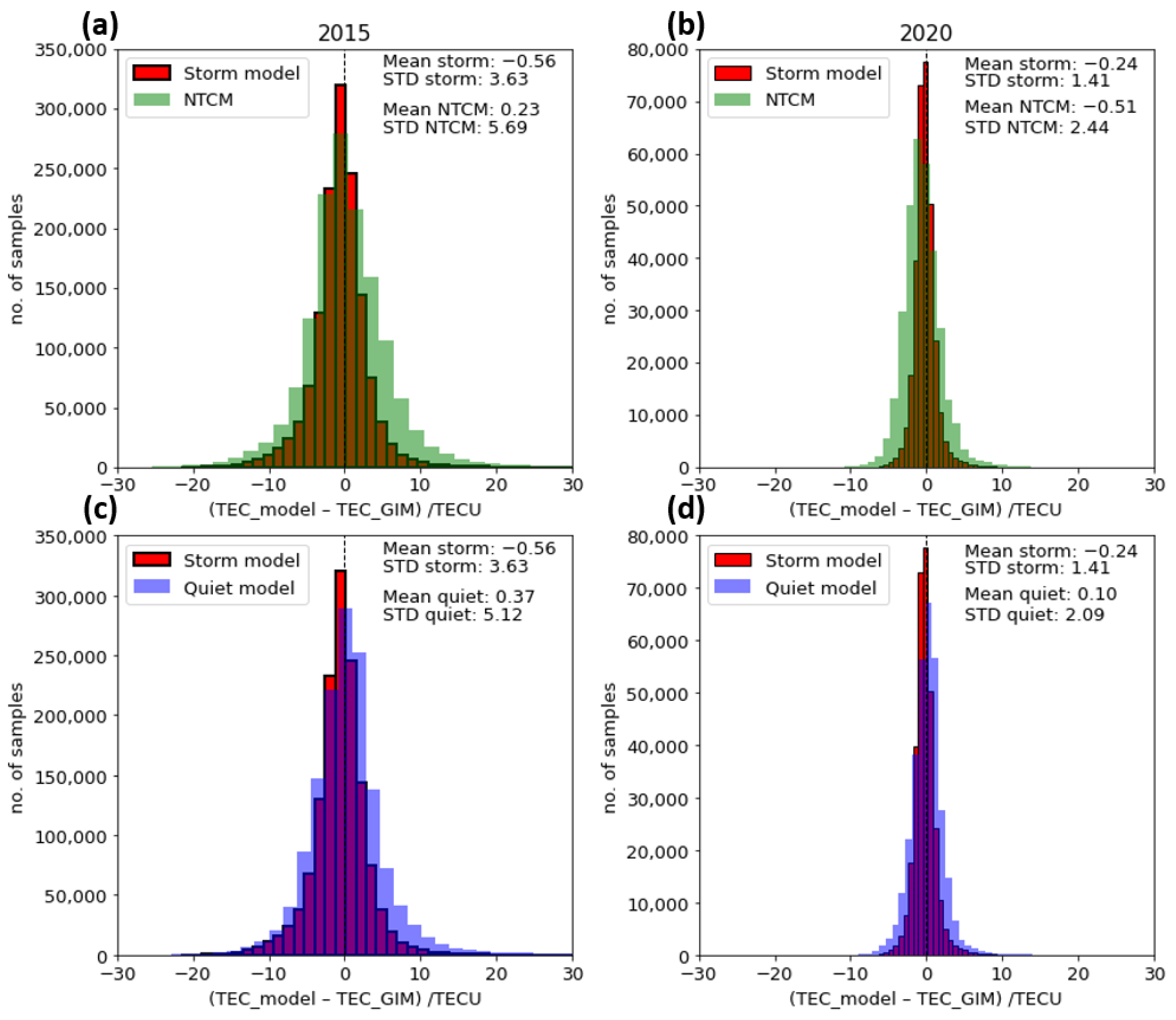
The data was divided into training, validation and testing datasets. It was divided by year in order to avoid information leakage, where the model already has information about the test dataset and predictions during testing become too optimistic. This can occur when the dataset contains very short intervals of data instead of complete storms or when a scaler for normalization is also fitted on the testing data. Using the training and validation datasets, the free parameters, also known as hyperparameters, are optimized. A few examples of the different hyperparameters that have to be set are the number of neurons or layers, activation function, regularization, learning rate and optimizer. The validation set was about 20 percent of the training dataset. The testing dataset consists of a total of 33 storms that happened during 2015 (27 storms), which is an HSA period, and 2020 (6 storms), an LSA period. The testing dataset is excluded from the training and validation datasets, which means that the data is unseen until the performance of the model is tested. Early stopping, where the model stops the training process when the validation loss does not decrease for a certain number of epochs, was used so that the model does not overfit the training data and to reduce training time. The data was normalized using the MinMaxScaler function from the Scikit-Learn Python library [
33] to a range of [0, 1] and fitted on the training and validation datasets. Using normalized data, the model can converge faster. The FNN is built with Tensorflow [
34] and Keras Python libraries [
35]. To map non-linearities, the rectified linear unit (ReLU) was chosen as an activation function for the hidden layer, which is a very popular non-linear activation function [
36]. The output layer uses the linear identity activation function. Optimization algorithm ’Adam’ was used, which minimizes the mean squared error and is a computationally effective algorithm with low memory requirements [
37]. A learning rate of 0.0001 was used for the Adam optimizer. To avoid overfitting, a regularization term can be added which penalizes the model for fitting the training data too well. Therefore, a small regularization term of 0.00004 was added to the network.
The results for training the models with different numbers of neurons in one hidden layer are plotted in
Figure 5. In this figure, the results in terms of root mean square error (RMSE) and correlation for the relative TEC and the TEC are displayed. The relative TEC is converted to TEC in order to also show how well the model is performing in terms of TECU. This figure shows that the correlation increases and the RMSE decreases when more neurons are used in the hidden layer. Deeper networks, with architectures similar to the investigations carried out by Orus Perez [
38], were tested but the accuracy did not increase when more layers were used, as shown in
Table 2 below. After testing different architectures and hyperparameters, a network architecture with one hidden layer containing 40 neurons was chosen. The general architecture of the NN is shown
Figure 6. After choosing the hyperparameters and features, the model was trained once more with the validation data included. The model was trained on a personal computer with an Intel Core i7-8665U CPU and 16 GB RAM; therefore, no special hardware was needed. The model was fitted in 30 epochs (the number of cycles that the complete training dataset passes through the network) using a batch size (number of samples that are propagated through the network) of 128.
The model predicts the relative TEC, and the TEC is computed using the 27-day median of the preceding days. The TEC was computed using Equation (
2).
In this study, we also investigated if the quiet-time model VTEC predictions could be used as a substitute for the input of the 27-day median TEC. The quiet-time model was trained with Carrington-rotation-averaged TEC data, which is approximately 27 days. Using the output of the quiet-time model instead of the 27-day median, the relative TEC was predicted. The predicted relative TEC was used to update the quiet-time VTEC predictions in order to see if the quiet-time model was then capable of capturing the storm-time perturbations better. An overview of the method is shown in
Figure 7, below. The magnetic latitude, used for the quiet-time model, was not used for the storm-time model but the geographic latitude was used instead.
The performance of the model was tested by comparing the model’s predictions with the NTCM and the quiet-time model. The computationally very fast 12 coefficient NTCM developed at DLR is comparable in its simplicity to the GPS Klobuchar model and achieves a similar performance as the NeQuick G (optimized for Galileo system) and was recently adopted by the European Commission as an alternative to the NeQuick G model [
20,
24,
25,
26]. The results are shown in the section below.
5. Conclusions
In this work, a storm-time NN-based relative TEC model for the European region (with longitudes 30°W–50°E and latitudes 32.5°N–70°N) was proposed. The model uses the SYM-H, Hp30, DOY, UT, storm time, solar flux index F10.7 and the 27-day median TEC as input parameters in order to predict the relative TEC. The model was trained with UQRG GIM data from the UPC analysis center during storms. The storm dataset contains storms during the period 1998–2019, with the year 2015 excluded. The years 2015 and 2020 were used for testing which are a high-solar-activity and low-solar-activity year, respectively.
The method used for this paper provides the relative TEC with respect to the 27-day median TEC prior to the storm as an output instead of predicting the TEC directly. The 27-day median TEC of the preceding days computed from GIMs or TEC models can be provided as input.
Our investigations show that the model can describe the vertical TEC behavior during storm time well in many cases. The predicted relative TEC shows seasonal behavior, e.g., stronger positive phases during winter and negative phases during summer months. The performance of the model was compared to the quiet-time NN-based TEC model and the NTCM. The storm model outperformed the NTCM by approximately 1.9 TECU, which corresponds to a performance increase by 35.6% from 5.25 to 3.38 TECU. The storm-time model outperforms the quiet-time model by 1.3 TECU, which corresponds to a performance increase by 28.4% from 4.72 to 3.38 TECU. The model was also tested for whether it is capable of improving the quiet-time model performance, because the quiet-time model does not show storm-related perturbations. For this, the output of the quiet-time model was used as an input to the storm-time model, substituting the 27-day median TEC. The relative TEC was then computed and used to calculate the TEC. This method could improve the quiet-time model TEC predictions by 0.8 TECU, which corresponds to a performance increase by 17% from 4.72 to 3.92 TECU.

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}