
On the Processing of Dual-Channel Receiving Signals of the LuTan-1 SAR System

 ,
, 
 , and
, and 
Abstract
:1. Introduction
2. Materials and Methods
2.1. Principles of Methods
2.2. Echo Model
2.3. Azimuth Ambiguity
2.3.1. Dual-Channel Echo Reconstruction
2.3.2. Dual-Channel Echo Synthesis
2.4. Noise Equivalent Sigma Zero
2.5. Block Adaptive Quantization
3. Results
3.1. System Performance
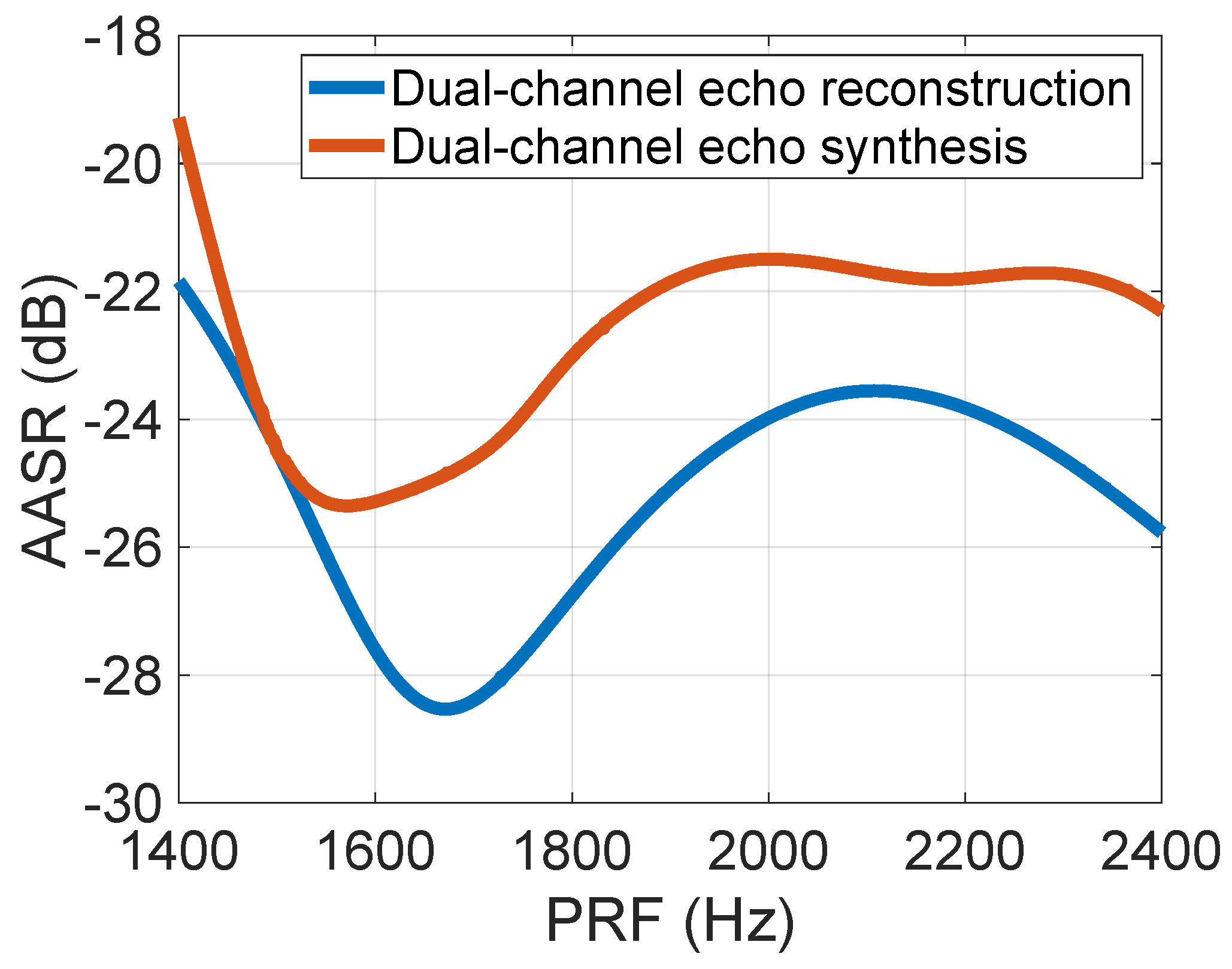
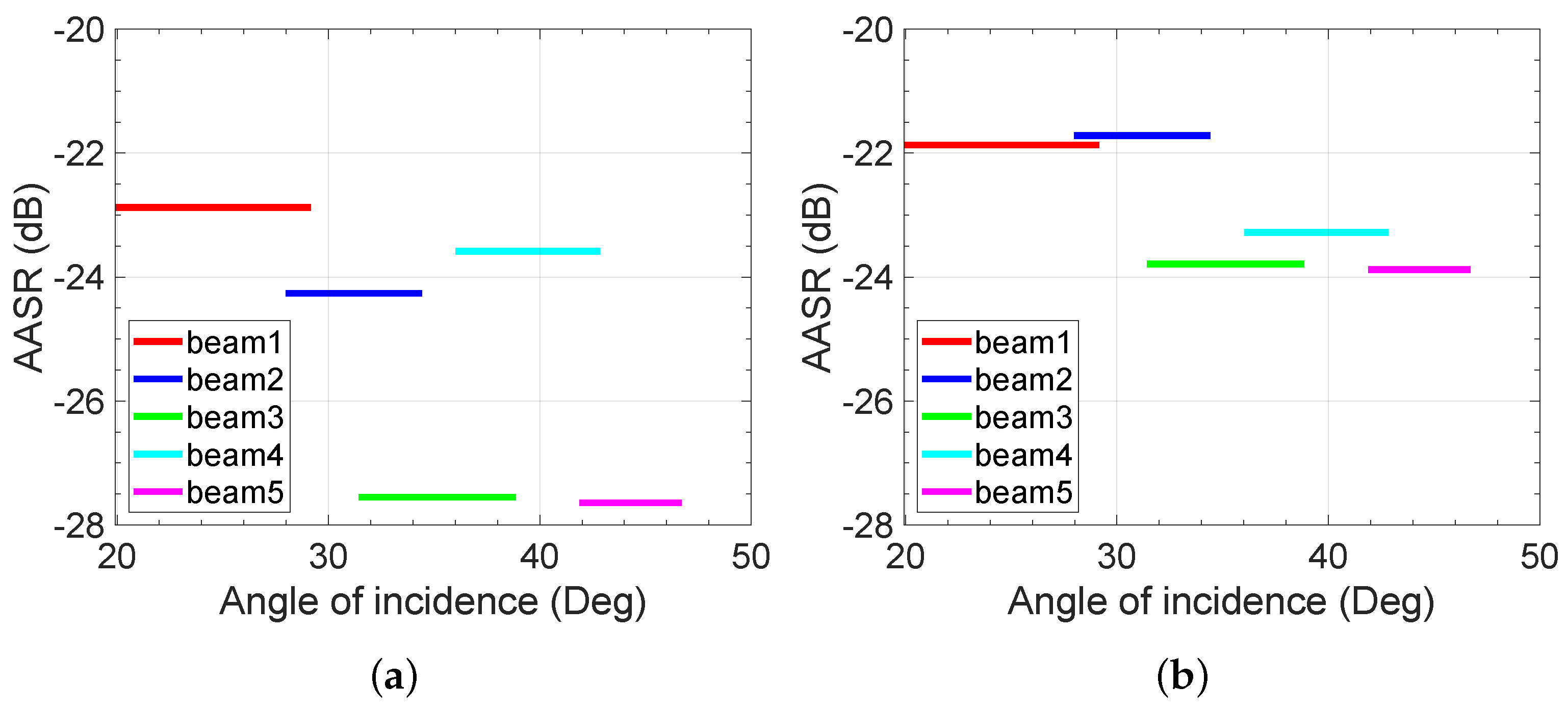
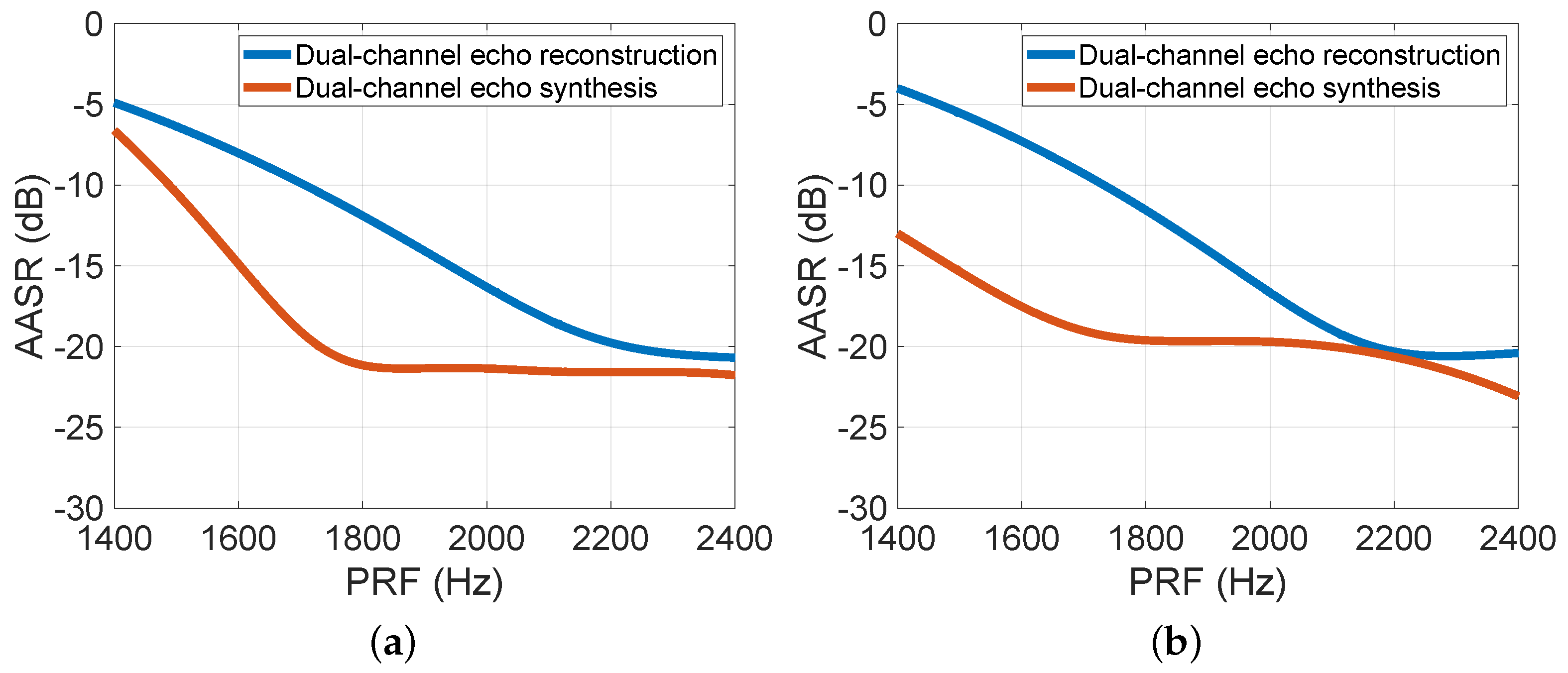
3.1.1. Azimuth Ambiguity-to-Signal Ratio
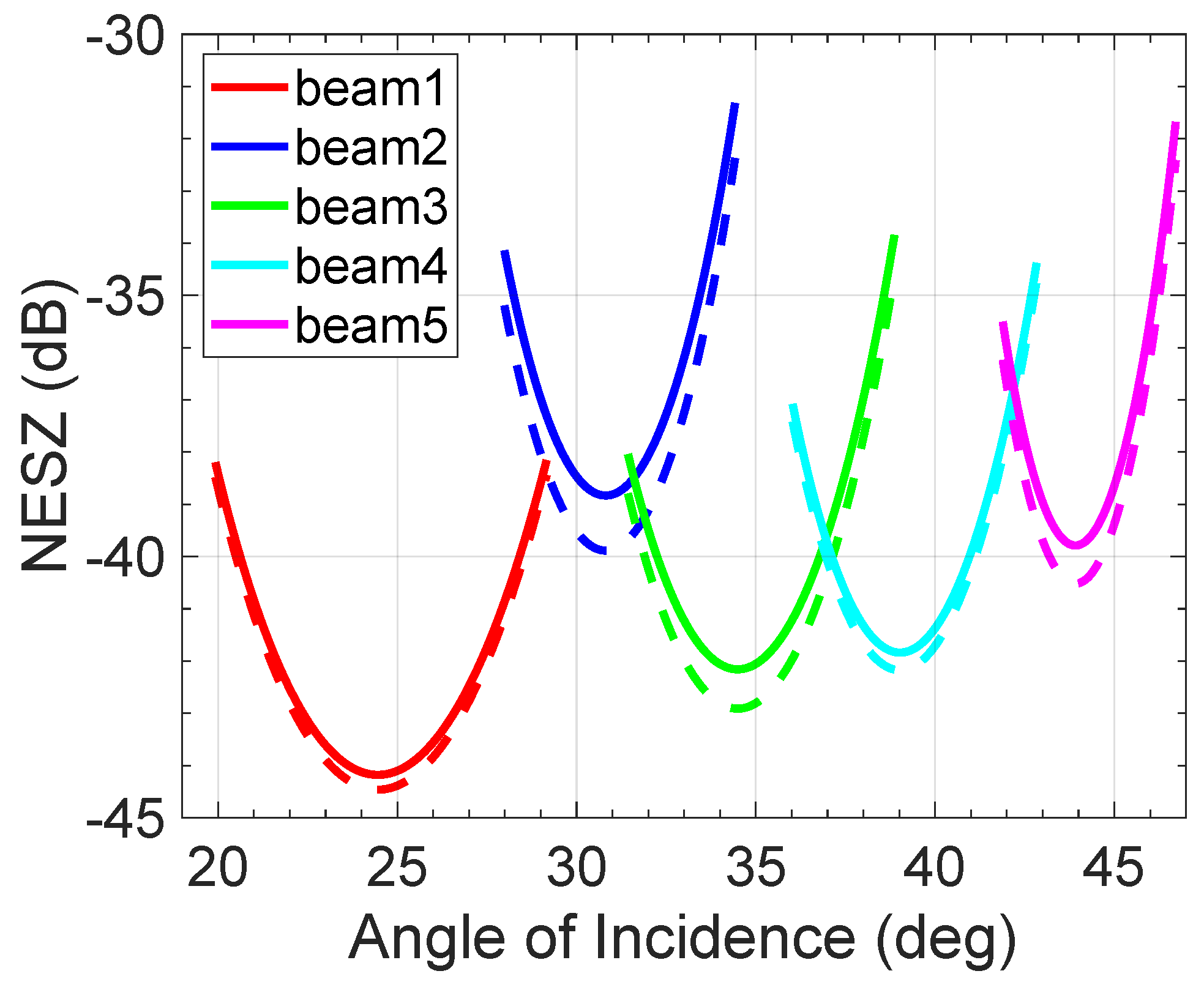
3.1.2. NESZ
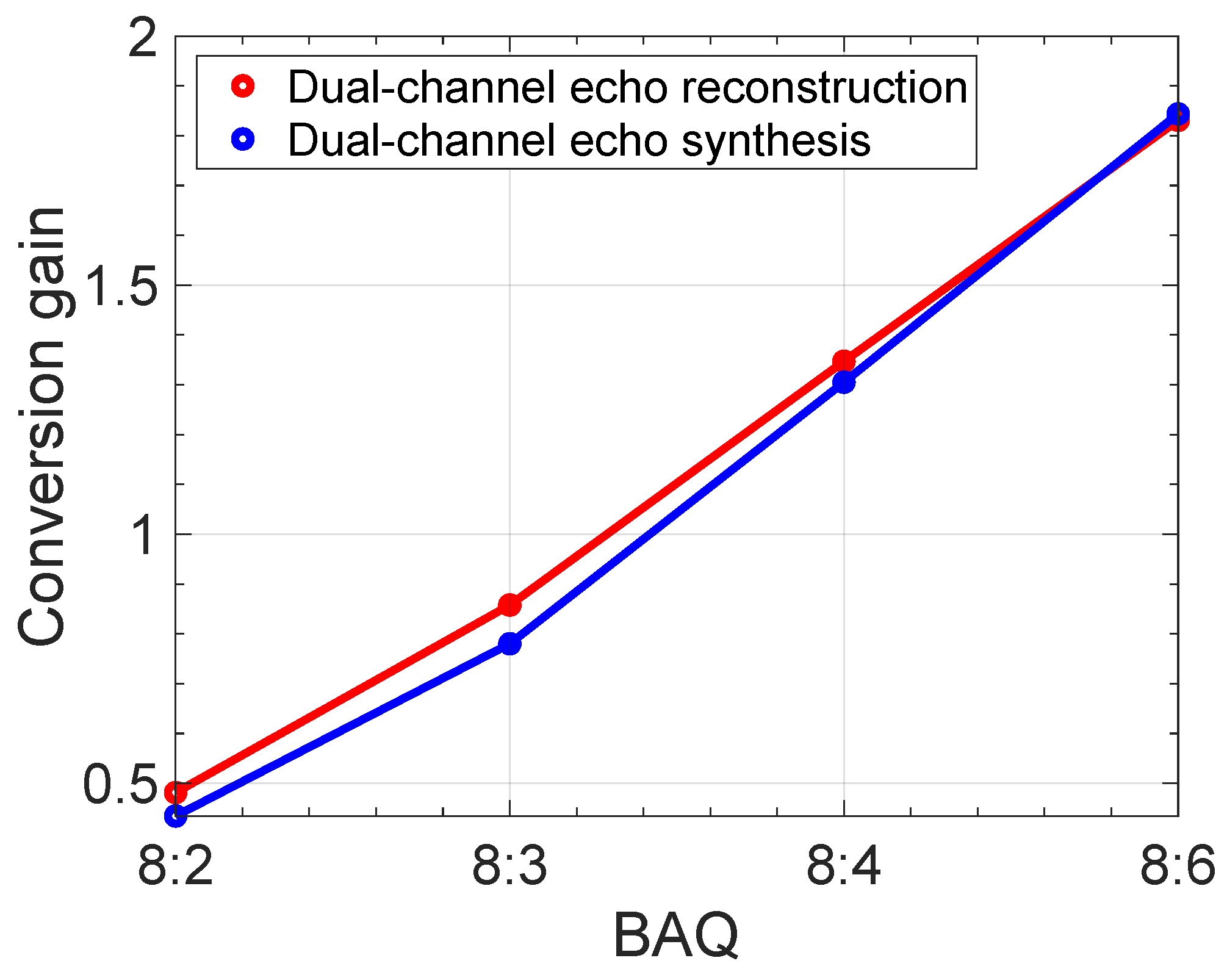
3.1.3. BAQ Performance
3.2. Imaging Quality
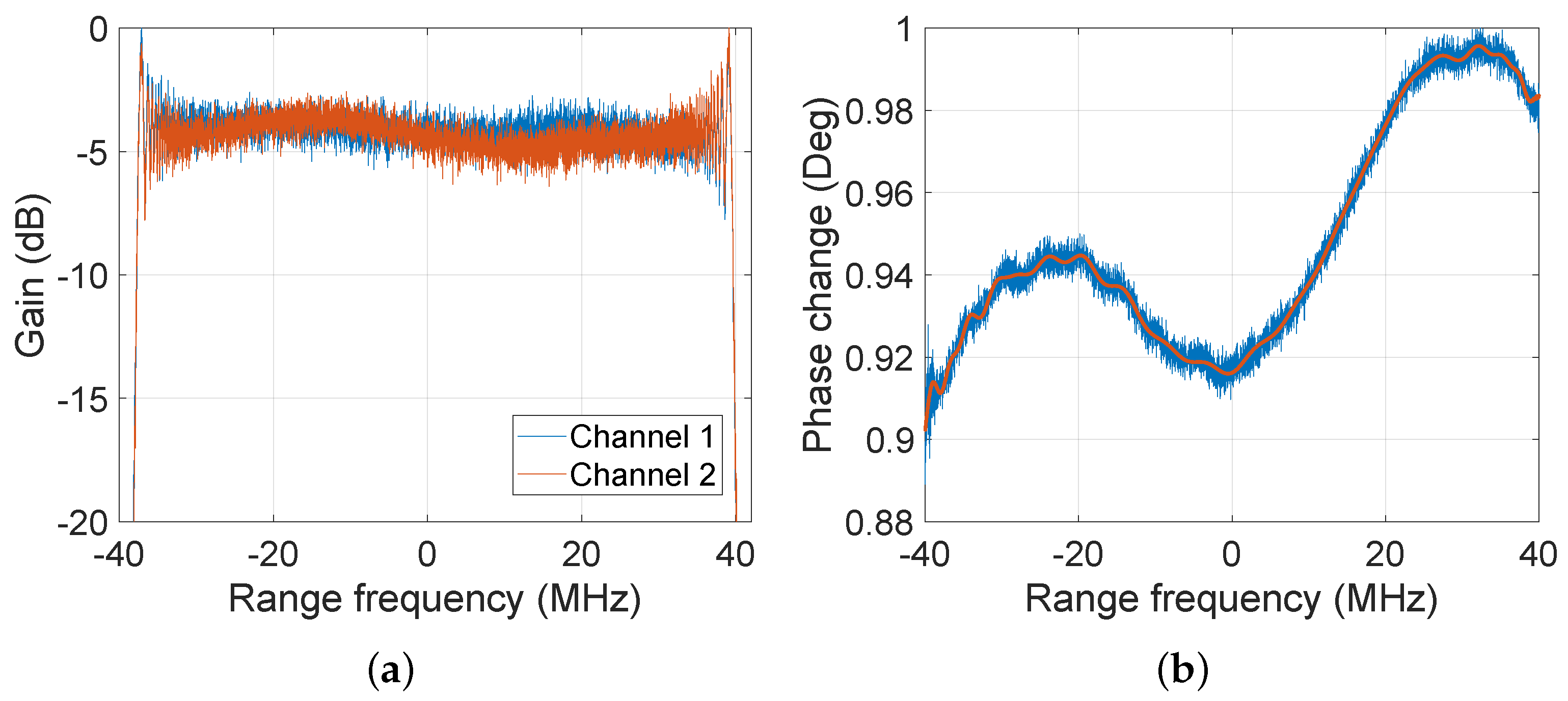
3.2.1. System Calibration Signal
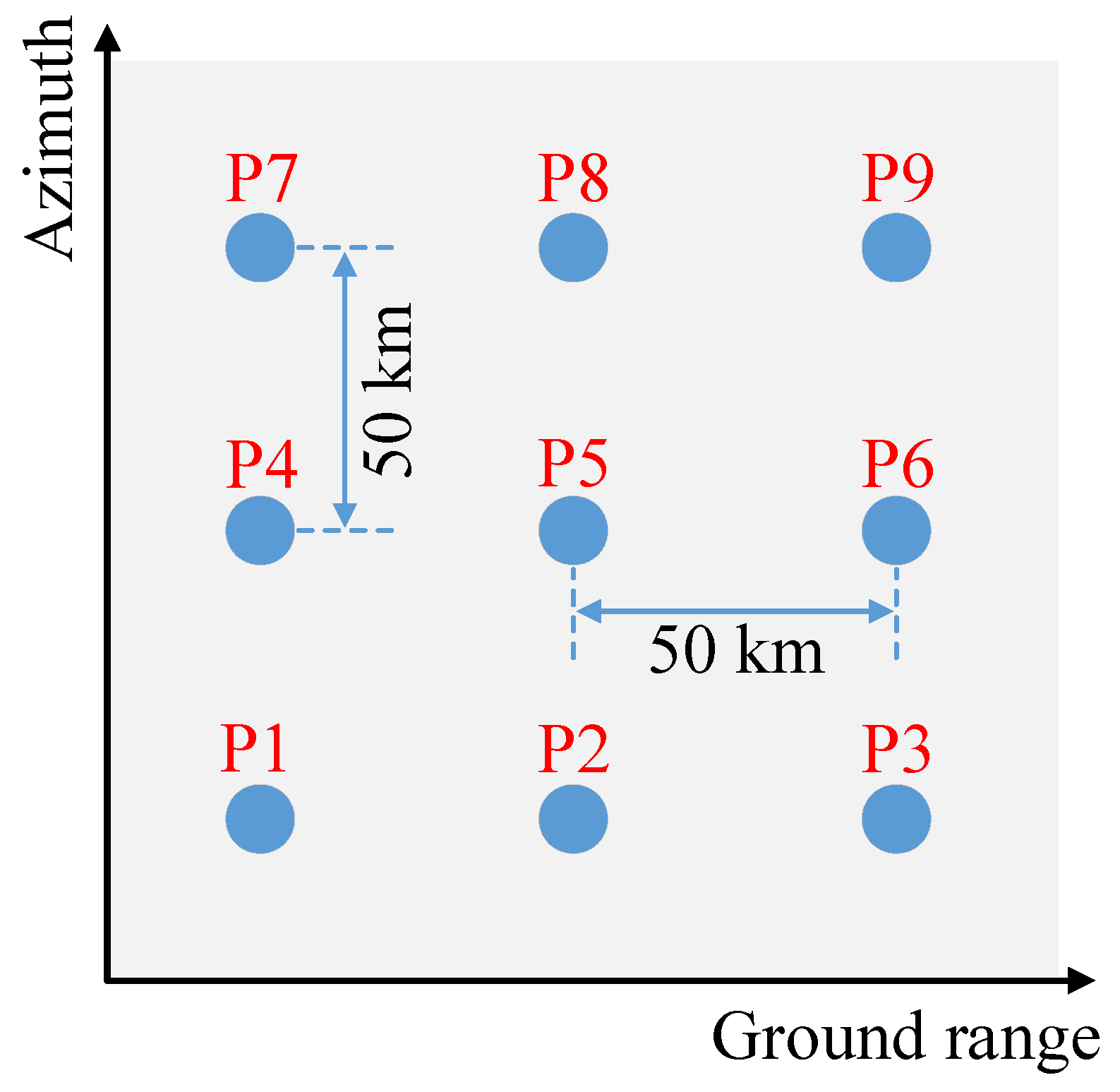
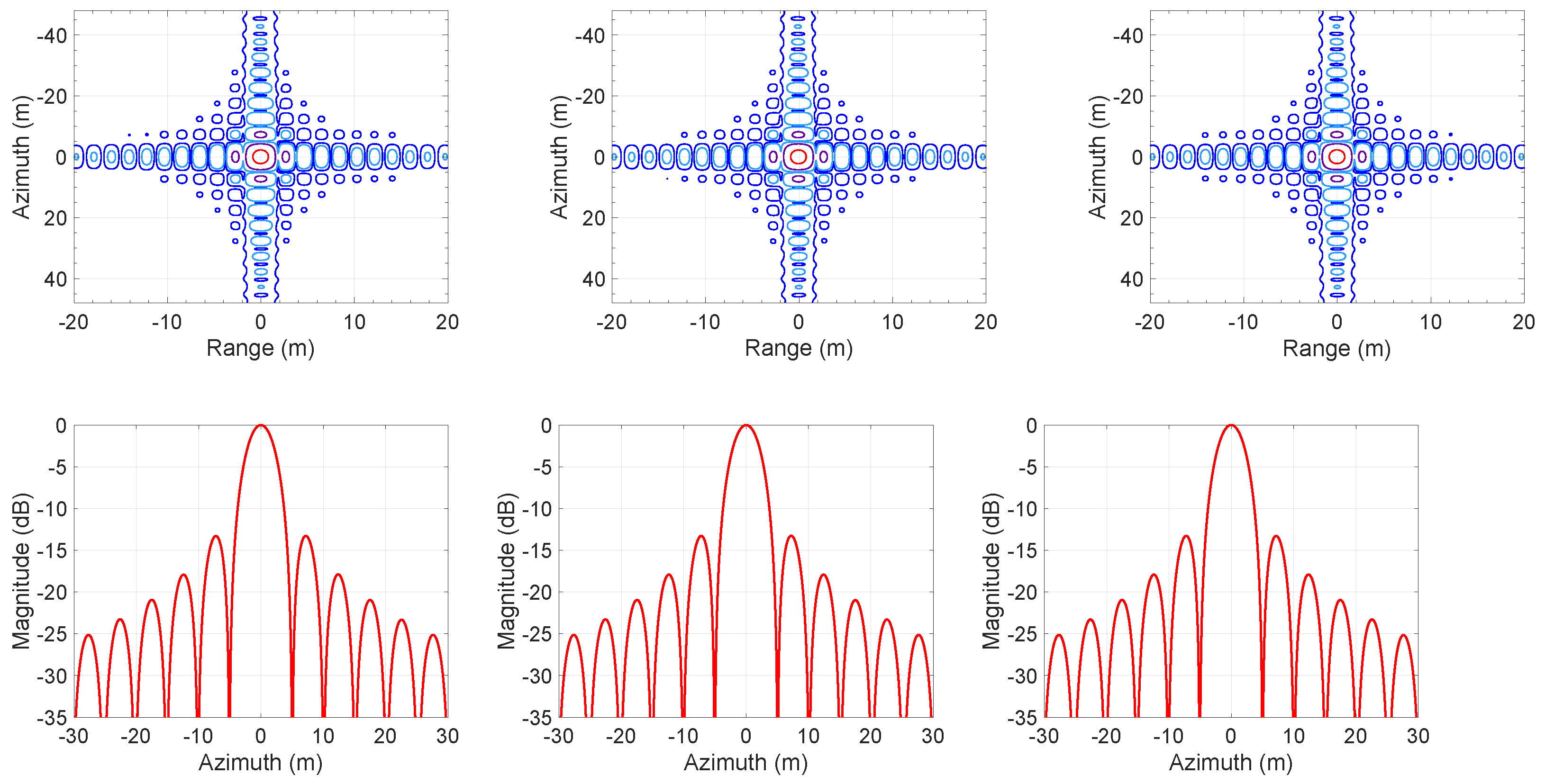
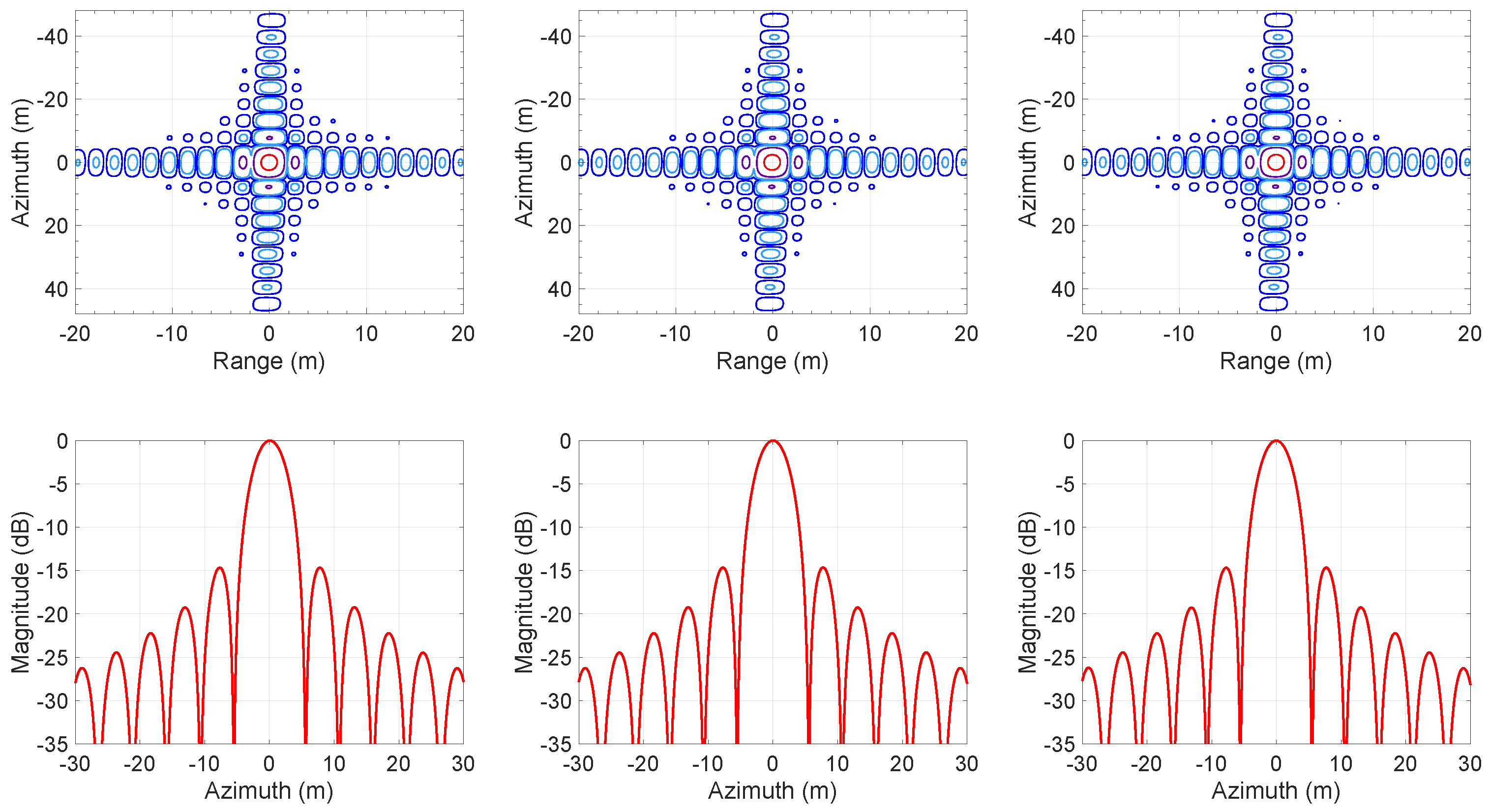
3.2.2. Results of Point Targets
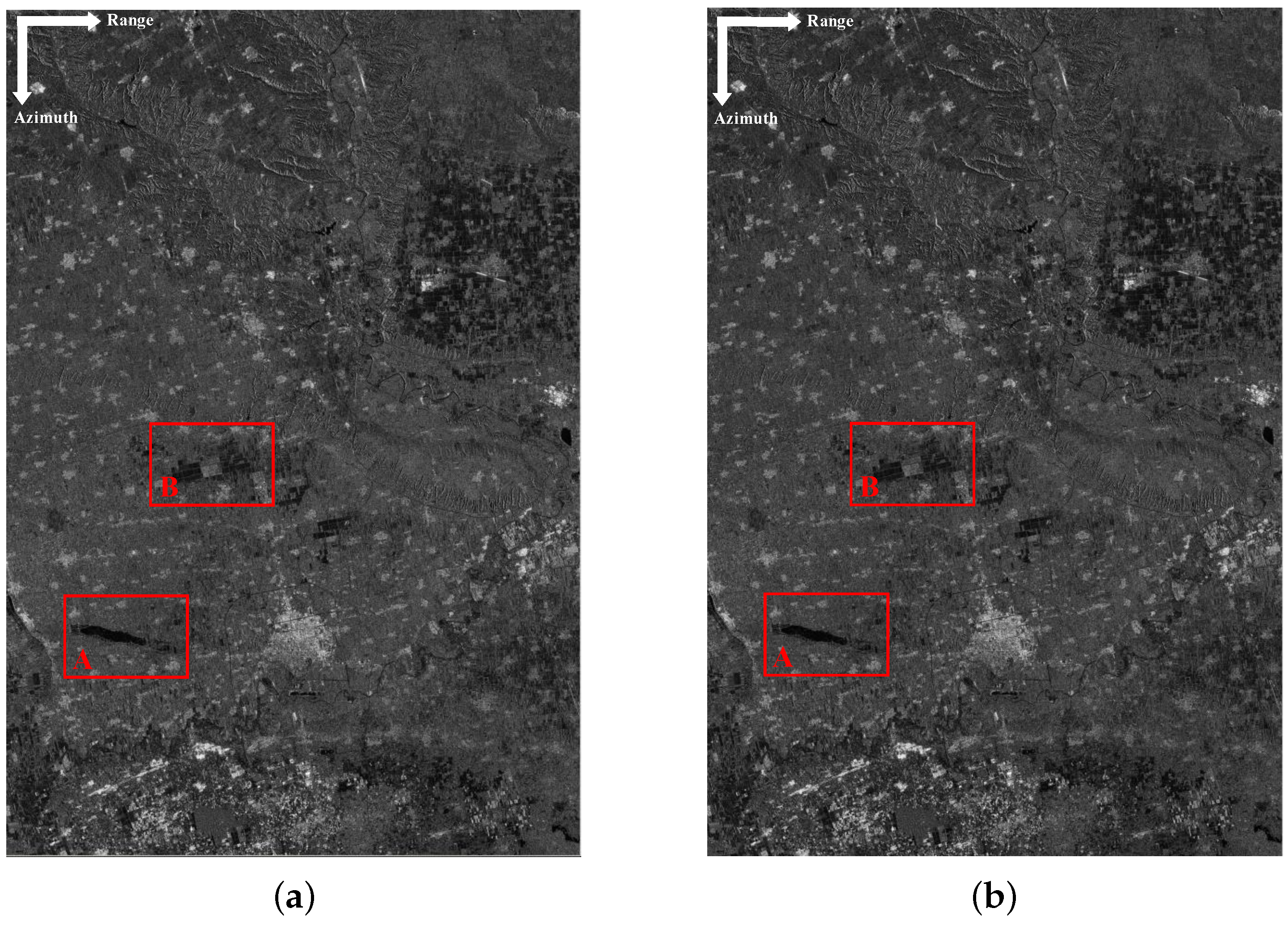
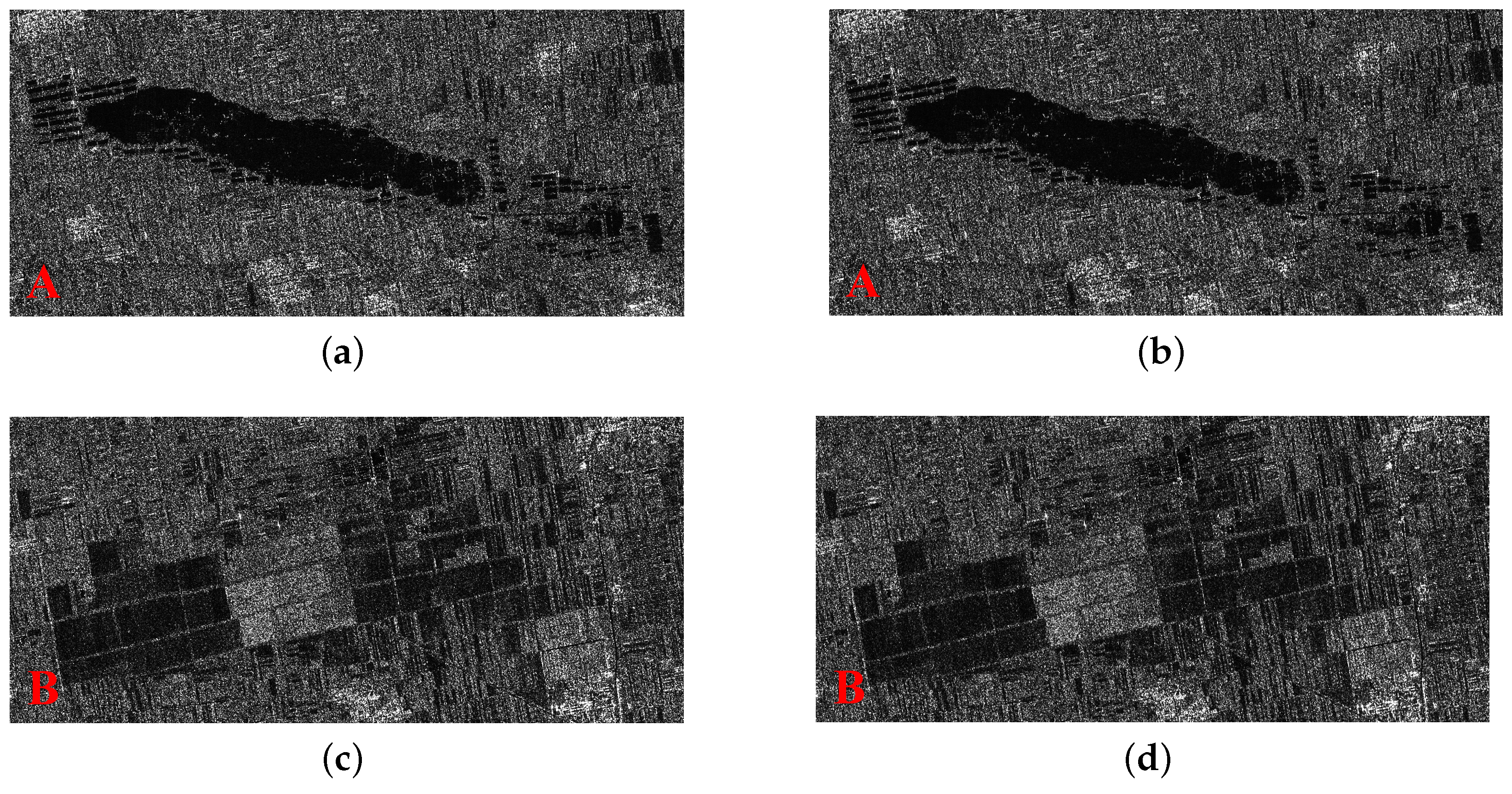
3.2.3. Results of Distributed Targets
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Moreira, A.; Prats-Iraola, P.; Younis, M.; Krieger, G.; Hajnsek, I.; Papathanassiou, K.P. A tutorial on synthetic aperture radar. IEEE Geosci. Remote Sens. Mag. 2013, 1, 6–43. [Google Scholar] [CrossRef] [Green Version]
- Jia, H.; Wang, Y.; Ge, D.; Deng, Y.; Wang, R. Improved offset tracking for predisaster deformation monitoring of the 2018 Jinsha River landslide (Tibet, China). Remote Sens. Environ. 2020, 247, 111899. [Google Scholar] [CrossRef]
- Balbi, E.; Terrone, M.; Faccini, F.; Scafidi, D.; Barani, S.; Tosi, S.; Crispini, L.; Cianfarra, P.; Poggi, F.; Ferretti, G. Persistent Scatterer Interferometry and Statistical Analysis of Time-Series for Landslide Monitoring: Application to Santo Stefano d’Aveto (Liguria, NW Italy). Remote Sens. 2021, 13, 3348. [Google Scholar] [CrossRef]
- Motohka, T.; Kankaku, Y.; Suzuki, S.; Shimada, M. Status of the advanced land observing satellite-2 (ALOS-2) and its follow-on L-band SAR mission. In Proceedings of the 2017 IEEE International Geoscience and Remote Sensing Symposium, IGARSS 2017, Fort Worth, TX, USA, 23–28 July 2017; pp. 2427–2429. [Google Scholar]
- Gebert, N.; Carnicero Dominguez, B.; Davidson, M.W.J.; Diaz Martin, M.; Silvestrin, P. SAOCOM-CS—A passive companion to SAOCOM for single-pass L-band SAR interferometry. In Proceedings of the 2014 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Quebec City, QC, Canada, 13–18 July 2014; pp. 1251–1254. [Google Scholar]
- Giardino, A.; Defilippi, M.; Pasquali, P.; Buck, C. Experimental SAR Processors for Bistatic Concepts Considering Companion Satellites. In Proceedings of the 2019 IEEE International Geoscience and Remote Sensing Symposium, Yokohama, Japan, 28 July–2 August 2019; pp. 1128–1131. [Google Scholar]
- Valentino, A.; Daria, D.; Piantanida, R.; Witte, E.D.; Dominguez, B.C. Data Focusing Solutions for Future Bi-static SAR Missions. In Proceedings of the 12th European Conference on Synthetic Aperture Radar, Aachen, Germany, 4–7 June 2018; pp. 810–815. [Google Scholar]
- Moreira, A.; Krieger, G.; Hajnsek, I.; Papathanassiou, K.; Younis, M.; Lopez-Dekker, P.; Huber, S.; Villano, M.; Pardini, M.; Eineder, M.; et al. TanDEM-L: A Highly Innovative Bistatic SAR Mission for Global Observation of Dynamic Processes on the Earth’s Surface. IEEE Trans. Geosci. Remote Sens. 2015, 3, 8–23. [Google Scholar] [CrossRef]
- Huber, S.; de Almeida, F.Q.; Villano, M.; Younis, M.; Krieger, G.; Moreira, A. TanDEM-L: A Technical Perspective on Future Spaceborne SAR Sensors for Earth Observation. IEEE Trans. Geosci. Remote Sens. 2018, 56, 4792–4807. [Google Scholar] [CrossRef] [Green Version]
- Krieger, G.; Hajnsek, I.; Papathanassiou, K.; Eineder, M.; Younis, M.; De Zan, F.; Huber, S.; Lopez-Dekker, P.; Prats, P.; Werner, M.; et al. TanDEM-L: An innovative interferometric and polarimetric SAR mission to monitor earth system dynamics with high resolution. In Proceedings of the 2010 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Honolulu, HI, USA, 25–30 July 2010; pp. 253–256. [Google Scholar]
- Moreira, A.; Krieger, G.; Hajnsek, I.; Papathanassiou, K.; Younis, M.; Lopez-Dekker, F.; Huber, S.; Eineder, M.; Shimada, M.; Motohka, T.; et al. ALOS-Next/TanDEM-L: A highly innovative SAR mission for global observation of dynamic processes on the earth’s surface. In Proceedings of the 2015 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Milan, Italy, 26–31 July 2015; pp. 1253–1256. [Google Scholar]
- Kraus, T.; Braeutigam, B.; Bachmann, M.; Krieger, G. Multistatic SAR Imaging: First Results of a Four Phase Center Experiment with TerraSAR-X and TanDEM-X. In Proceedings of the 11th European Conference on Synthetic Aperture Radar (EUSAR), Hamburg, Germany, 6–9 June 2016; pp. 1–5. [Google Scholar]
- Wang, R.; Wang, W.; Shao, Y.; Hong, F.; Wang, P.; Deng, Y.; Zhang, Z.; Loffeld, O. First Bistatic Demonstration of Digital Beamforming in Elevation With TerraSAR-X as an Illuminator. IEEE Trans. Geosci. Remote Sens. 2016, 54, 842–849. [Google Scholar] [CrossRef]
- An, H.; Wu, J.; Sun, Z.; Yang, J. A Two-Step Nonlinear Chirp Scaling Method for Multichannel GEO Spaceborne–Airborne Bistatic SAR Spectrum Reconstructing and Focusing. IEEE Trans. Geosci. Remote Sens. 2019, 57, 3713–3728. [Google Scholar] [CrossRef]
- Krieger, G.; Gebert, N.; Younis, M.; Bordoni, F.; Patyuchenko, A.; Moreira, A. Advanced Concepts for Ultra-Wide-Swath SAR Imaging. In Proceedings of the 7th European Conference on Synthetic Aperture Radar (EUSAR), Friedrichshafen, Germany, 2–5 June 2008; pp. 1–4. [Google Scholar]
- Sakar, N.; Rodriguez-Cassola, M.; Prats-Iraola, P.; Moreira, A. Azimuth Reconstruction Algorithm for Multistatic SAR Formations With Large Along-Track Baselines. IEEE Trans. Geosci. Remote Sens. 2020, 58, 1931–1940. [Google Scholar] [CrossRef]
- Guccione, P.; Monti Guarnieri, A.; Rocca, F.; Giudici, D.; Gebert, N. Along-Track Multistatic Synthetic Aperture Radar Formations of Minisatellites. Remote Sens. 2020, 12, 124. [Google Scholar] [CrossRef] [Green Version]
- Jin, G.; Liu, K.; Liu, D.; Liang, D.; Zhang, H.; Ou, N.; Zhang, Y.; Deng, Y.; Li, C.; Wang, R. An Advanced Phase Synchronization Scheme for LT-1. IEEE Trans. Geosci. Remote Sens. 2020, 58, 1735–1746. [Google Scholar] [CrossRef]
- Liang, D.; Liu, K.; Yue, H.; Chen, Y.; Deng, Y.; Zhang, H.; Li, C.; Jin, G.; Wang, R. An Advanced Non-Interrupted Synchronization Scheme for Bistatic Synthetic Aperture Radar. In Proceedings of the 2019 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Yokohama, Japan, 28 July–2 August 2019; pp. 1116–1119. [Google Scholar]
- Liang, D.; Liu, K.; Zhang, H.; Chen, Y.; Yue, H.; Liu, D.; Deng, Y.; Lin, H.; Fang, T.; Li, C.; et al. The Processing Framework and Experimental Verification for the Noninterrupted Synchronization Scheme of LuTan-1. IEEE Trans. Geosci. Remote Sens. 2021, 59, 5740–5750. [Google Scholar] [CrossRef]
- Jin, G.; Liu, K.; Deng, Y.; Sha, Y.; Wang, R.; Liu, D.; Wang, W.; Long, Y.; Zhang, Y. Nonlinear Frequency Modulation Signal Generator in LT-1. IEEE Geosci. Remote Sens. Lett. 2019, 16, 1570–1574. [Google Scholar] [CrossRef]
- Zhang, Y.; Wang, W.; Wang, R.; Deng, Y.; Jin, G.; Long, Y. A Novel NLFM Waveform With Low Sidelobes Based on Modified Chebyshev Window. IEEE Geosci. Remote Sens. Lett. 2020, 17, 814–818. [Google Scholar] [CrossRef]
- Gebert, N. Multi-Channel Azimuth Processing for High-Resolution Wide-Swath SAR Imaging; DLR Deutsches Zentrum fur Luft- und Raumfahrt e.V.: Cologne, Germany, 2009. [Google Scholar]
- Krieger, G.; Gebert, N.; Moreira, A. Unambiguous SAR signal reconstruction from nonuniform displaced phase center sampling. IEEE Geosci. Remote Sens. Lett. 2004, 1, 260–264. [Google Scholar] [CrossRef] [Green Version]
- Laskowski, P.; Bordoni, F.; Younis, M. Error analysis and calibration techniques for multichannel SAR instruments. In Proceedings of the 2013 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Melbourne, Australia, 21–26 July 2013; pp. 4503–4506. [Google Scholar]
- Queiroz de Almeida, F.; Younis, M.; Krieger, G.; Moreira, A. An Analytical Error Model for Spaceborne SAR Multichannel Azimuth Reconstruction. IEEE Geosci. Remote Sens. Lett. 2018, 15, 853–857. [Google Scholar] [CrossRef]
- Rousseau, L.P.; Chouinard, J.Y.; Gierull, C.H.; Deslauriers, C.G. Comparison of two processing methodologies for ScanSAR-GMTI. In Proceedings of the 2017 IEEE Radar Conference (RadarConf), Seattle, WA, USA, 8–12 May 2017; pp. 1191–1195. [Google Scholar]
- Makhoul, E.; Broquetas, A.; Ruiz Rodon, J.; Zhan, Y.; Ceba, F. A Performance Evaluation of SAR-GMTI Missions for Maritime Applications. IEEE Trans. Geosci. Remote Sens. 2015, 53, 2496–2509. [Google Scholar] [CrossRef] [Green Version]
- Gabele, M.; Brautigam, B.; Schulze, D.; Steinbrecher, U.; Tous-Ramon, N.; Younis, M. Fore and Aft Channel Reconstruction in the TerraSAR-X Dual Receive Antenna Mode. IEEE Trans. Geosci. Remote Sens. 2010, 48, 795–806. [Google Scholar] [CrossRef]
- Cumming, I.G.; Wong, F.H. Digital Processing of Synthetic Aperture Radar Data: Algorithms and Implementation; Artech House: Norwood, MA, USA, 2005. [Google Scholar]
- Shang, M.; Qiu, X.; Han, B.; Ding, C.; Hu, Y. Channel Imbalances and Along-Track Baseline Estimation for the GF-3 Azimuth Multichannel Mode. Remote Sens. 2019, 11, 1297. [Google Scholar] [CrossRef] [Green Version]
- Younis, M.; Boer, J.; Ortega, C.; Schulze, D.; Huber, S.; Mittermayer, J. Determening the optimum compromise between SAR data compression and radiometric performance—An approach based on the analysis of TerraSAR-X data-. In Proceedings of the 2008 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Boston, MA, USA, 7–11 July 2008; pp. III-107–III-110. [Google Scholar]
- Feng, J.; Gao, C.; Zhang, Y.; Wang, R. Phase Mismatch Calibration of the Multichannel SAR Based on Azimuth Cross Correlation. IEEE Geosci. Remote Sens. Lett. 2013, 10, 903–907. [Google Scholar] [CrossRef]
- Zhang, H.; Deng, Y.; Wang, R.; Wang, W.; Jia, X.; Liu, D.; Li, C. End-to-end Bistatic InSAR Raw Data Simulation for TwinSAR-L Mission. In Proceedings of the 2019 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Yokohama, Japan, 28 July–2 August 2019; pp. 3519–3522. [Google Scholar]
- Guangcai, F.; Sigurjon, J.; Yann, K. Which Fault Segments Ruptured in the 2008 Wenchuan Earthquake and Which Did Not? New Evidence from Near-Fault 3D Surface Displacements Derived from SAR Image Offsets. Bull. Seismol. Soc. Am. 2017, 107, 1185–1200. [Google Scholar]
- Bowen, Z.; Robert, W.; Yunkai, D.; Ma, P.; Lin, H.; Wang, J. Mapping the Yellow River Delta land subsidence with multitemporal SAR interferometry by exploiting both persistent and distributed scatterers. ISPRS J. Photogramm. Remote Sens. 2019, 148, 157–173. [Google Scholar]
- Liu, X.; Zhao, C.; Zhang, Q.; Yang, C.; Zhu, W. Heifangtai loess landslide type and failure mode analysis with ascending and descending Spot-mode TerraSAR-X datasets. Landslides 2020, 17, 205–215. [Google Scholar] [CrossRef] [Green Version]
- Ma, P.; Lin, H.; Wang, W.; Yu, H.; Chen, F.; Jiang, L.; Zhou, L.; Zhang, Z.; Shi, G.; Wang, J. Toward Fine Surveillance: A Review of Multitemporal Interferometric Synthetic Aperture Radar for Infrastructure Health Monitoring. IEEE Geosci. Remote Sens. Mag. 2021, 205–215. [Google Scholar] [CrossRef]
- Agarwal, V.; Kumar, A.; Gee, D.; Grebby, S.; Gomes, R.L.; Marsh, S. Comparative Study of Groundwater-Induced Subsidence for London and Delhi Using PSInSAR. Remote Sens. 2021, 13, 4741. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | L1A/B_SM_S | L1A_SM_S |
|---|---|---|
| Carrier frequency | 1.26 GHz | |
| Antenna length | 9.8 m | |
| View of angle | 20.31° | 22.68° |
| Transmitting beam width | 2.13° | 1.23° |
| Receiving beam width | 2.47° | 1.23° |
| Equivalent beam width | 2.27° | 1.23° |
| Pulse repetition frequency | 1723 Hz | 1444 Hz |
| Parameters | beam1 | beam2 | beam3 | beam4 | beam5 |
|---|---|---|---|---|---|
| PRF | 1444 Hz | 2262 Hz | 1758 Hz | 1470 Hz | 1753 Hz |
| Near angle | 18.15° | 25.40° | 28.47° | 32.52° | 37.61° |
| Far angle | 26.45° | 31.11° | 35.00° | 38.42° | 41.71° |
| Center angle | 22.68° | 28.12° | 31.44° | 35.36° | 39.46° |
| Scanning angle | −7.82° | −2.38° | 0.94° | 4.86° | 8.96° |
| Index | Requirement |
|---|---|
| Range of incident angle | 20°∼46.78° |
| Swath width | 80 km∼100 km |
| Azimuth resolution | 6 m |
| Range resolution | 5.5 m∼3.3 m |
| AASR | ≤−20 dB |
| NESZ | ≤−31 dB |
| Methods | Targets | Range | Azimuth | Residual Phase | ||||
|---|---|---|---|---|---|---|---|---|
| IRW (m) | PSLR (dB) | ISLR (dB) | IRW (m) | PSLR (dB) | ISLR (dB) | |||
| Reconstruction | P1 | 3.96 | −13.12 | −9.60 | 3.61 | −13.23 | −9.98 | 0.0988° |
| P5 | 3.96 | −13.17 | −9.63 | 3.61 | −13.23 | −9.97 | 0.1025° | |
| P9 | 3.96 | −13.11 | −9.61 | 3.61 | −13.23 | −9.97 | 0.1188° | |
| Synthesis | P1 | 3.96 | −13.10 | −9.59 | 4.68 | −14.73 | −11.73 | 0.0988° |
| P5 | 3.96 | −13.14 | −9.65 | 4.68 | −14.76 | −11.70 | 0.1025° | |
| P9 | 3.96 | −13.13 | −9.62 | 4.68 | −14.74 | −10.69 | 0.1188° | |
| Items 1 | Beam Configurations | Reconstruction | Synthesis | Comparison 2 |
|---|---|---|---|---|
| AASR | beam1 | −22.88 dB | −21.87 dB | R |
| beam2 | −24.26 dB | −21.72 dB | R | |
| beam3 | −27.55 dB | −23.79 dB | R | |
| beam4 | −23.58 dB | −23.28 dB | R | |
| beam5 | −27.64 dB | −23.88 dB | R | |
| AASR with 5° error 3 | beam1 | −5.53 dB | −8.24 dB | S |
| beam2 | −20.26 dB | −21.58 dB | S | |
| beam3 | −11.03 dB | −20.61 dB | S | |
| beam4 | −5.91 dB | −9.26 dB | S | |
| beam5 | −10.93 dB | −20.51 dB | S | |
| AASR with 10 cm error 3 | beam1 | −4.65 dB | −14.04 dB | S |
| beam2 | −20.05 dB | −21.23 dB | S | |
| beam3 | −10.58 dB | −19.47 dB | S | |
| beam4 | −5.05 dB | −14.66 dB | S | |
| beam5 | −10.46 dB | −19.45 dB | S | |
| NESZ 4 | beam1 | −44.18 dB | −44.46 dB | S |
| beam2 | −38.83 dB | −39.88 dB | S | |
| beam3 | −42.16 dB | −42.91 dB | S | |
| beam4 | −41.83 dB | −42.17 dB | S | |
| beam5 | −39.79 dB | −40.52 dB | S | |
| CG under BAQ 8:6 | beam1 | 1.831 | 1.844 | S |
| CG under BAQ 8:4 | beam1 | 1.347 | 1.305 | R |
| CG under BAQ 8:3 | beam1 | 0.858 | 0.780 | R |
| CG under BAQ 8:2 | beam1 | 0.481 | 0.434 | R |
| Range resolution | beam1 | 3.96 m | 3.96 m | ≈ |
| Range PSLR | beam1 | −13.17 m | −13.14 m | ≈ |
| Range ISLR | beam1 | −9.63 m | −9.65 m | ≈ |
| Azimuth resolution | beam1 | 3.61 m | 4.68 m | R |
| Azimuth PSLR | beam1 | −13.23 m | −14.76 m | S |
| Azimuth ISLR | beam1 | −9.97 m | −11.70 m | S |
| Data volume to be processed | - | Reconstruction is double that of synthesis | ||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lin, H.; Deng, Y.; Zhang, H.; Liu, D.; Liang, D.; Fang, T.; Wang, R. On the Processing of Dual-Channel Receiving Signals of the LuTan-1 SAR System. Remote Sens. 2022, 14, 515. https://doi.org/10.3390/rs14030515
Lin H, Deng Y, Zhang H, Liu D, Liang D, Fang T, Wang R. On the Processing of Dual-Channel Receiving Signals of the LuTan-1 SAR System. Remote Sensing. 2022; 14(3):515. https://doi.org/10.3390/rs14030515
Chicago/Turabian StyleLin, Haoyu, Yunkai Deng, Heng Zhang, Dacheng Liu, Da Liang, Tingzhu Fang, and Robert Wang. 2022. "On the Processing of Dual-Channel Receiving Signals of the LuTan-1 SAR System" Remote Sensing 14, no. 3: 515. https://doi.org/10.3390/rs14030515
APA StyleLin, H., Deng, Y., Zhang, H., Liu, D., Liang, D., Fang, T., & Wang, R. (2022). On the Processing of Dual-Channel Receiving Signals of the LuTan-1 SAR System. Remote Sensing, 14(3), 515. https://doi.org/10.3390/rs14030515