
Delineation of Geomorphological Woodland Key Habitats Using Airborne Laser Scanning


Abstract
:1. Introduction
2. Materials and Methods
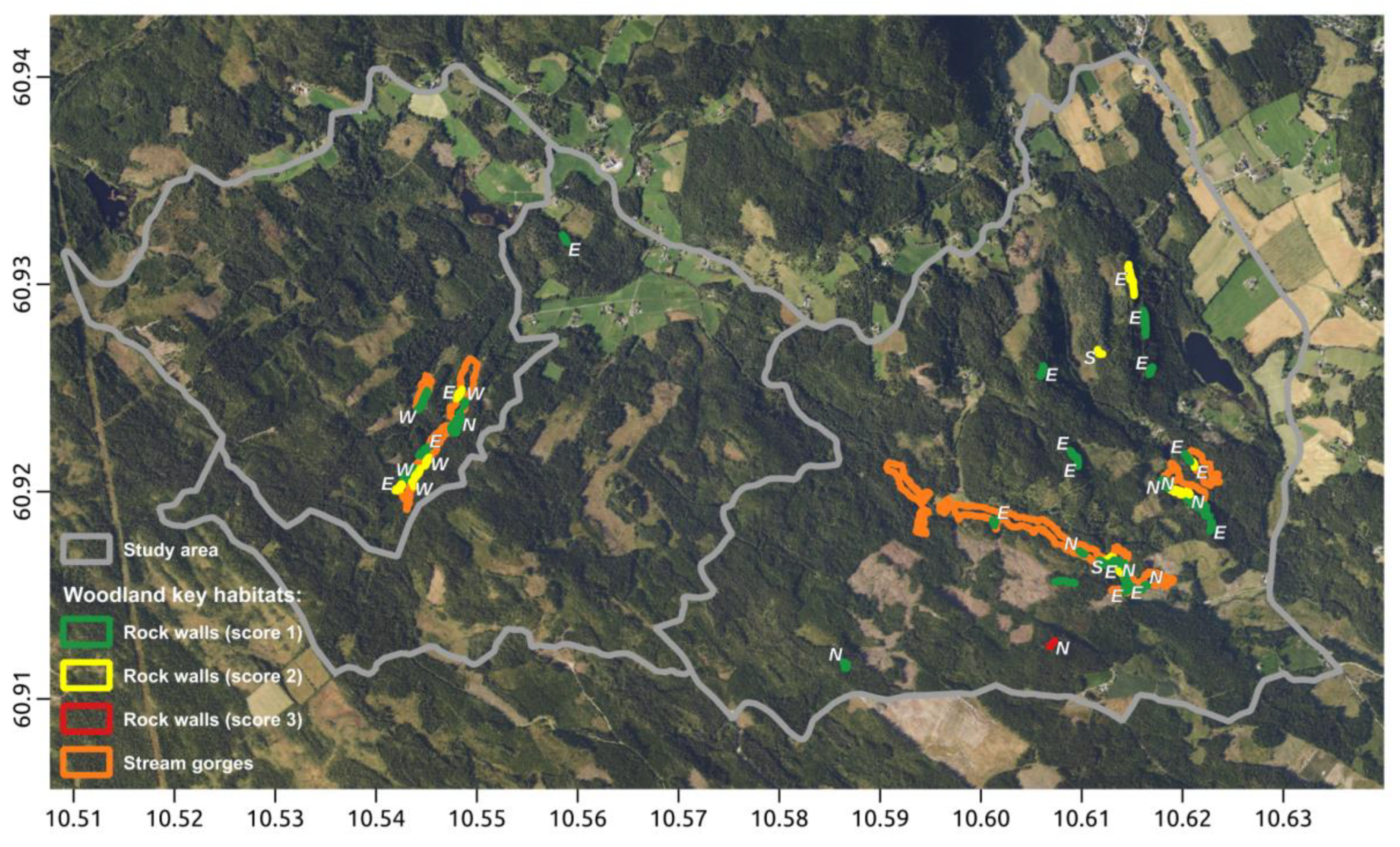
2.1. Study Area
2.2. Field Inventory
2.3. Remotely Sensed Data
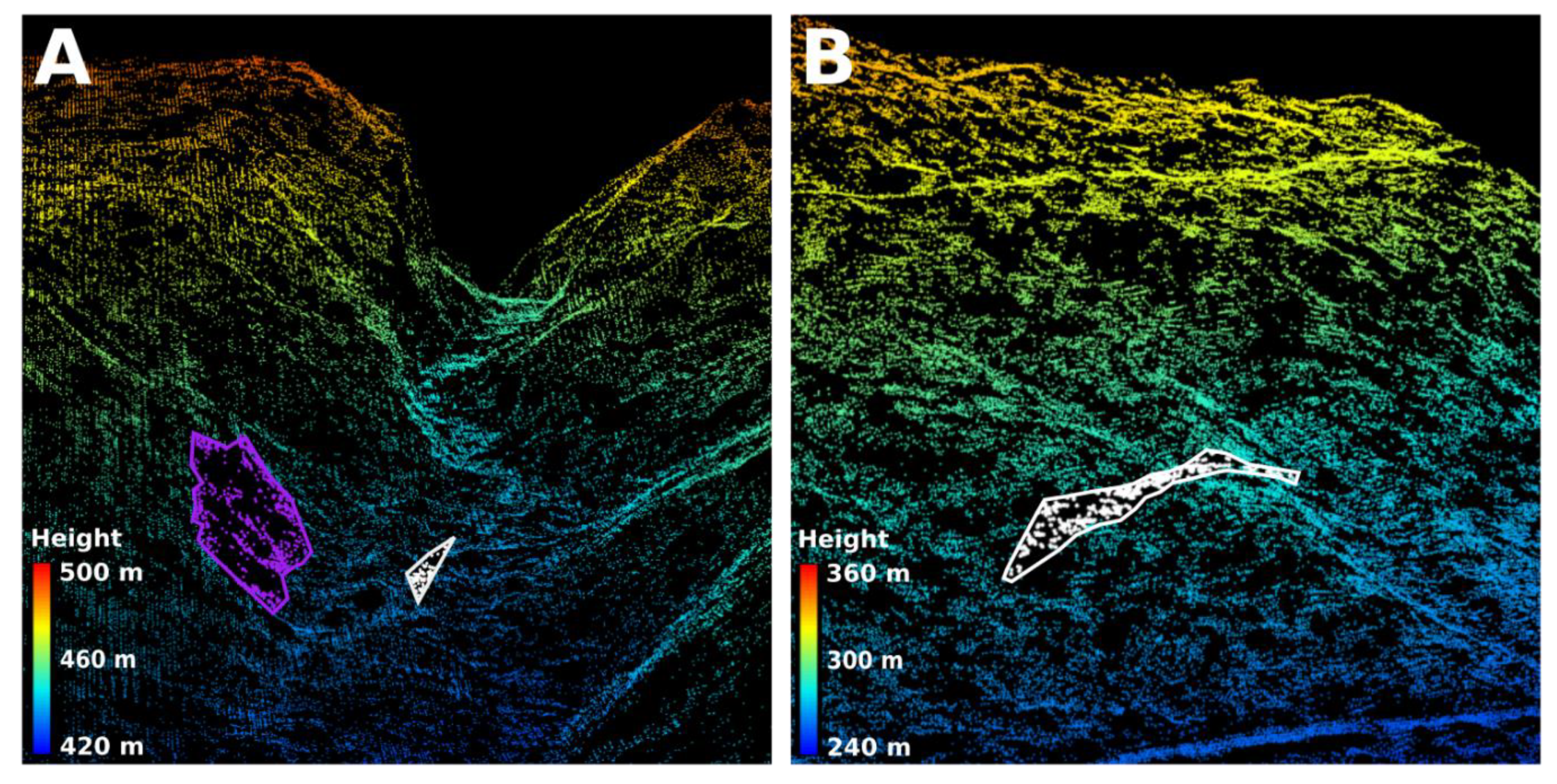
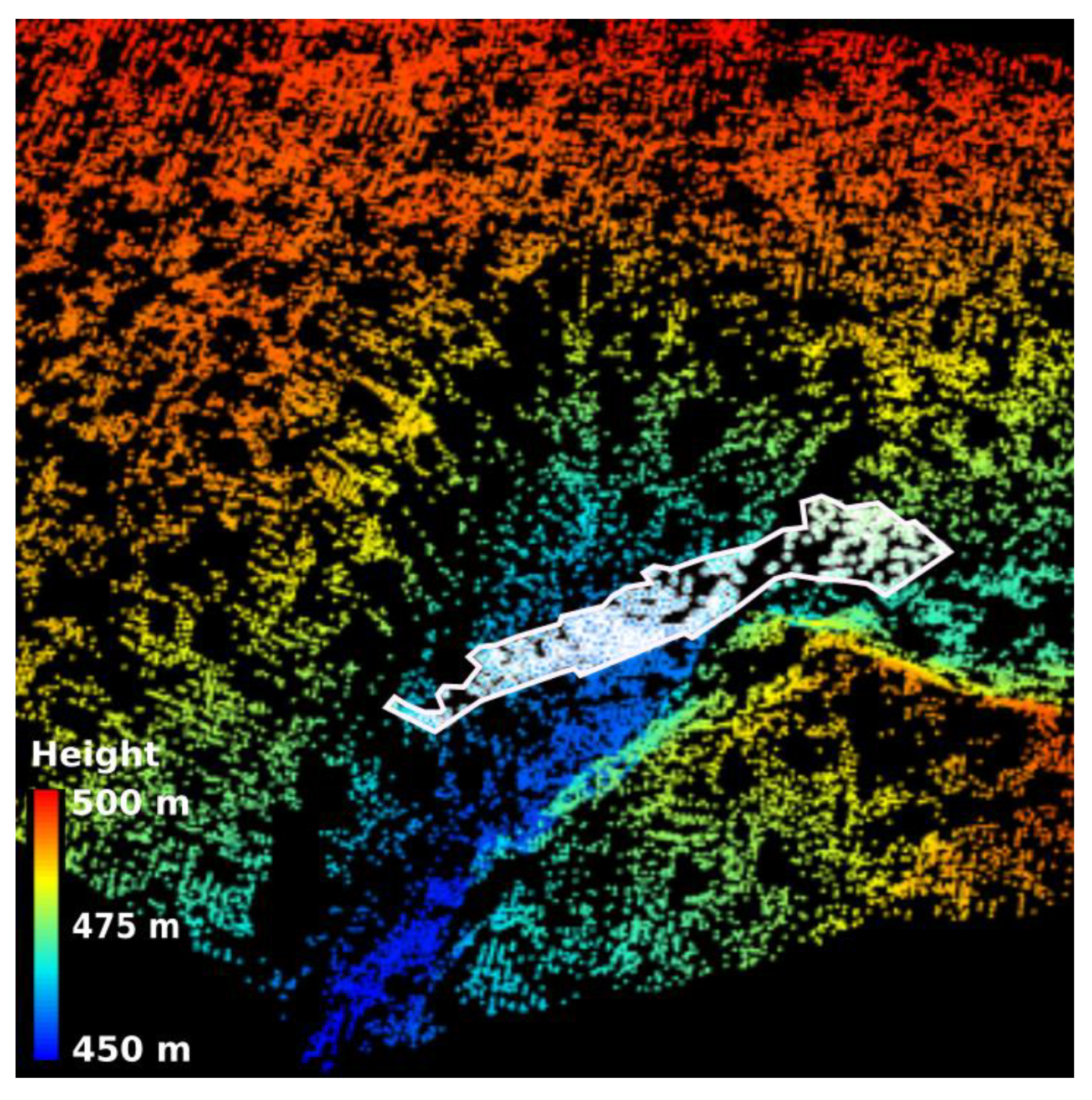
2.4. Rock Wall Detection
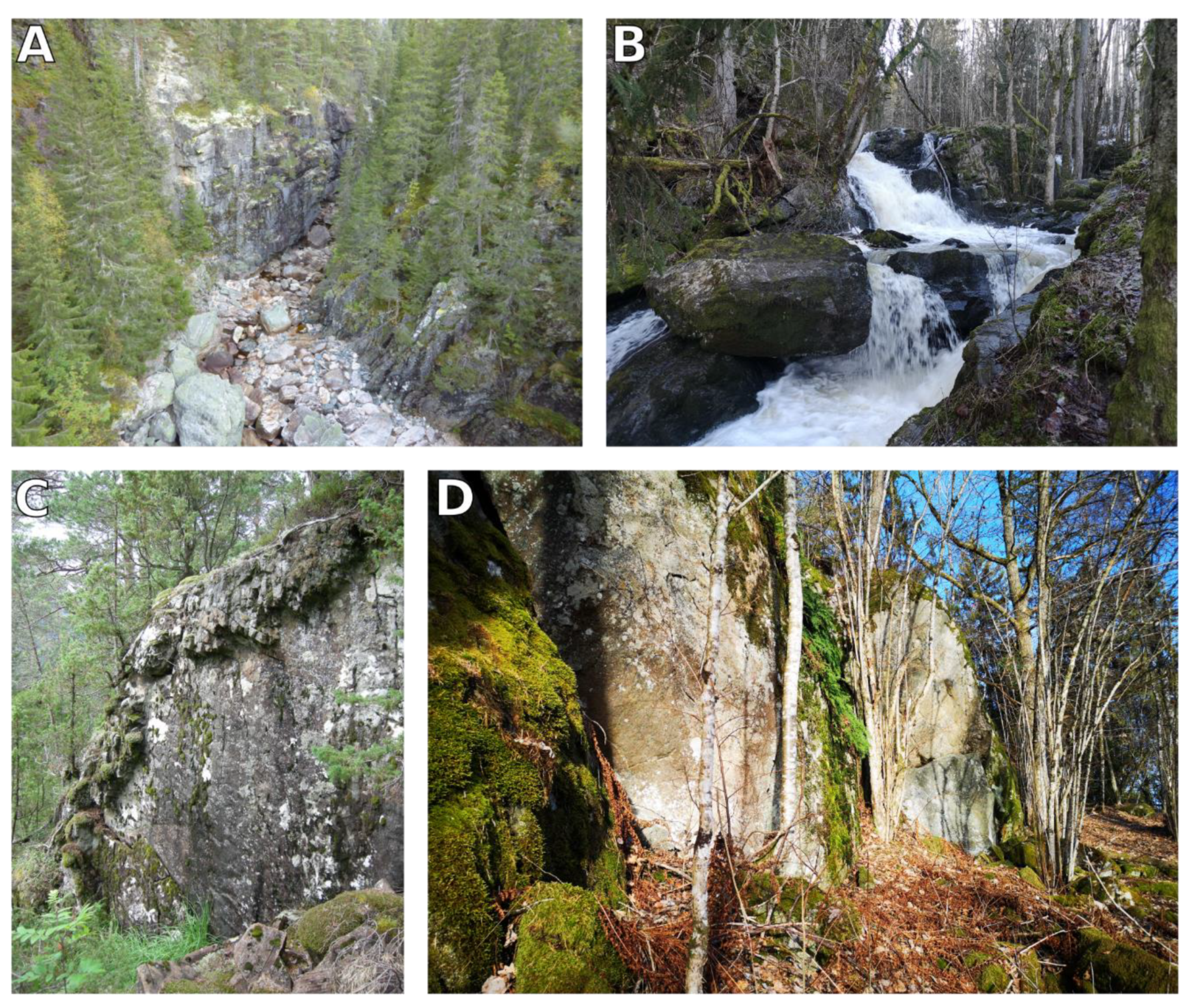
2.5. Stream Gorges Detection
2.6. Woodland Key Habitat Aspect
- if aspect < 0
- WKHaspect = 90 − aspect
- else if aspect > 90
- WKHaspect = 360 − aspect + 90
- else
- WKHaspect = 90 − aspect
2.7. Accuracy Assessment
3. Results
3.1. Woodland Key Habitat Detection
3.2. Woodland Key Habitat Aspect
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Brockerhoff, E.G.; Barbaro, L.; Castagneyrol, B.; Forrester, D.I.; Gardiner, B.; González-Olabarria, J.R.; Lyver, P.O.; Meurisse, N.; Oxbrough, A.; Taki, H.; et al. Forest Biodiversity, Ecosystem Functioning and the Provision of Ecosystem Services. Biodivers. Conserv. 2017, 26, 3005–3035. [Google Scholar] [CrossRef] [Green Version]
- Curtis, P.G.; Slay, C.M.; Harris, N.L.; Tyukavina, A.; Hansen, M.C. Classifying Drivers of Global Forest Loss. Science 2018, 361, 1108–1111. [Google Scholar] [CrossRef] [PubMed]
- Timonen, J.; Siitonen, J.; Gustafsson, L.; Kotiaho, J.S.; Stokland, J.N.; Sverdrup-Thygeson, A.; Mönkkönen, M. Woodland Key Habitats in Northern Europe: Concepts, Inventory and Protection. Scand. J. For. Res. 2010, 25, 309–324. [Google Scholar] [CrossRef] [Green Version]
- Nitare, J.; Norén, M. Nyckelbiotoper Kartläggs i Nytt Projekt Vid Skogsstyrelsen [Woodland Key-Habitats of Rare and Endangered Species Will Be Mapped in a New Project of the Swedish National Board of Forestry]. Sven. Bot. Tidskr. 1992, 86, 219–226. [Google Scholar]
- Baumann, C.; Gjerde, I.; Blom, H.H.; Sætersdal, M.; Nilsen, J.-E.; Løken, B.; Ekanger, I. Environmental Inventories in Forests—Biodiversity. A Manual for Conducting Inventories of Forest Habitats. Part 1: Background and Principles; Skogforsk: Uppsala, Sweden, 2002; ISBN 9788280830050. [Google Scholar]
- Gjerde, I.; Sætersdal, M.; Blom, H.H. Complementary Hotspot Inventory—A Method for Identification of Important Areas for Biodiversity at the Forest Stand Level. Biol. Conserv. 2007, 137, 549–557. [Google Scholar] [CrossRef]
- Næsset, E. Area-Based Inventory in Norway—From Innovation to an Operational Reality. In Forestry Applications of Airborne Laser Scanning; Maltamo, M., Næsset, E., Vauhkonen, J., Eds.; Springer: Dordrecht, The Netherlands, 2014; pp. 215–240. [Google Scholar]
- Maltamo, M.; Packalen, P. Species-Specific Management Inventory in Finland. In Forestry Applications of Airborne Laser Scanning; Maltamao, M., Næsset, E., Vauhkonen, J., Eds.; Managing Forest Ecosystems; Springer: Dordrecht, The Netherlands, 2014; pp. 241–252. ISBN 9789401786621. [Google Scholar]
- Eid, T.; Gobakken, T.; Næsset, E. Comparing Stand Inventories for Large Areas Based on Photo-Interpretation and Laser Scanning by Means of Cost-plus-Loss Analyses. Scand. J. For. Res. 2004, 19, 512–523. [Google Scholar] [CrossRef]
- Haga, H.E.E.S.; Nilsen, A.B.; Ullerud, H.A.; Bryn, A. Quantification of Accuracy in Field-based Land Cover Maps: A New Method to Separate Different Components. Appl. Veg. Sci. 2021, 24, e12578. [Google Scholar] [CrossRef]
- Eriksen, E.L.; Ullerud, H.A.; Halvorsen, R.; Aune, S.; Bratli, H.; Horvath, P.; Volden, I.K.; Wollan, A.K.; Bryn, A. Point of View: Error Estimation in Field Assignment of Land-Cover Types. Phytocoenologia 2018, 49, 135–148. [Google Scholar] [CrossRef] [Green Version]
- Zielewska-Büttner, K.; Adler, P.; Kolbe, S.; Beck, R.; Ganter, L.M.; Koch, B.; Braunisch, V. Detection of Standing Deadwood from Aerial Imagery Products: Two Methods for Addressing the Bare Ground Misclassification Issue. For. Trees Livelihoods 2020, 11, 801. [Google Scholar] [CrossRef]
- Pesonen, A.; Maltamo, M.; Eerikäinen, K.; Packalèn, P. Airborne Laser Scanning-Based Prediction of Coarse Woody Debris Volumes in a Conservation Area. For. Ecol. Manag. 2008, 255, 3288–3296. [Google Scholar] [CrossRef]
- Martinuzzi, S.; Vierling, L.A.; Gould, W.A.; Falkowski, M.J.; Evans, J.S.; Hudak, A.T.; Vierling, K.T. Mapping Snags and Understory Shrubs for a LiDAR-Based Assessment of Wildlife Habitat Suitability. Remote Sens. Environ. 2009, 113, 2533–2546. [Google Scholar] [CrossRef] [Green Version]
- Falkowski, M.J.; Evans, J.S.; Martinuzzi, S.; Gessler, P.E.; Hudak, A.T. Characterizing Forest Succession with Lidar Data: An Evaluation for the Inland Northwest, USA. Remote Sens. Environ. 2009, 113, 946–956. [Google Scholar] [CrossRef] [Green Version]
- Korhonen, L.; Salas, C.; Østgård, T.; Lien, V.; Gobakken, T.; Næsset, E. Predicting the Occurrence of Large-Diameter Trees Using Airborne Laser Scanning. Can. J. For. Res. 2016, 46, 461–469. [Google Scholar] [CrossRef] [Green Version]
- Saynajoki, R.; Packalén, P.; Maltamo, M.; Vehmas, M.; Eerikainen, K. Detection of Aspens Using High Resolution Aerial Laser Scanning Data and Digital Aerial Images. Sensors 2008, 8, 5037–5054. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Vehmas, M.; Eerikäinen, K.; Peuhkurinen, J.; Packalén, P.; Maltamo, M. Identification of Boreal Forest Stands with High Herbaceous Plant Diversity Using Airborne Laser Scanning. For. Ecol. Manag. 2009, 257, 46–53. [Google Scholar] [CrossRef]
- Hakkenberg, C.R.; Zhu, K.; Peet, R.K.; Song, C. Mapping Multi-Scale Vascular Plant Richness in a Forest Landscape with Integrated LiDAR and Hyperspectral Remote-Sensing. Ecology 2018, 99, 474–487. [Google Scholar] [CrossRef]
- White, B.; Ogilvie, J.; Campbell, D.M.H.; Hiltz, D.; Gauthier, B.; Chisholm, H.K.H.; Wen, H.K.; Murphy, P.N.C.; Arp, P.A. Using the Cartographic Depth-to-Water Index to Locate Small Streams and Associated Wet Areas across Landscapes. Can. Water Resour. J. 2012, 37, 333–347. [Google Scholar] [CrossRef]
- Pirotti, F.; Tarolli, P. Suitability of LiDAR Point Density and Derived Landform Curvature Maps for Channel Network Extraction. Hydrol. Process. 2010, 24, 1187–1197. [Google Scholar] [CrossRef]
- Smeeckaert, J.; Mallet, C.; David, N.; Chehata, N.; Ferraz, A. Large-Scale Classification of Water Areas Using Airborne Topographic Lidar Data. Remote Sens. Environ. 2013, 138, 134–148. [Google Scholar] [CrossRef]
- Höfle, B.; Vetter, M.; Pfeifer, N.; Mandlburger, G.; Stötter, J. Water Surface Mapping from Airborne Laser Scanning Using Signal Intensity and Elevation Data. Earth Surf. Processes Landf. 2009, 34, 1635–1649. [Google Scholar] [CrossRef]
- Janowski, L.; Tylmann, K.; Trzcinska, K.; Rudowski, S.; Tegowski, J. Exploration of Glacial Landforms by Object-Based Image Analysis and Spectral Parameters of Digital Elevation Model. IEEE Trans. Geosci. Remote Sens. 2021, 60, 4502817. [Google Scholar] [CrossRef]
- Baumann, C.; Gjerde, I.; Blom, H.H.; Sætersdal, M.; Nilsen, J.-E.; Løken, B.; Ekanger, I. Environmental Inventories in Forests—Biodiversity. A Manual for Conducting Inventories of Forest Habitats Part 4: Guidelines for Ranking and Selection; Skogforsk and the Norwegian Ministry of Agriculture: Ås, Norway, 2002. [Google Scholar]
- Landbruksdirektoratet. Veileder for Kartlegging Av MiS-Livsmiljøer Etter NiN; VEILEDER VERSJON 1.0, JUNI 2017; Landbruksdirektoratet: Oslo, Norway, 2017; p. 26. [Google Scholar]
- Halvorsen, R.; Skarpaas, O.; Bryn, A.; Bratli, H.; Erikstad, L.; Simensen, T.; Lieungh, E. Towards a Systematics of Ecodiversity: The EcoSyst Framework. Glob. Ecol. Biogeogr. 2020, 29, 1887–1906. [Google Scholar] [CrossRef]
- Zandbergen, P.A. Accuracy of IPhone Locations: A Comparison of Assisted GPS, WiFi and Cellular Positioning. Trans. GIS 2009, 13, 5–25. [Google Scholar] [CrossRef]
- Tomaštík, J.; Varga, M. Practical Applicability of Processing Static, Short-Observation-Time Raw GNSS Measurements Provided by a Smartphone under Tree Vegetation. Measurement 2021, 178, 109397. [Google Scholar] [CrossRef]
- Reutebuch, S.E.; McGaughey, R.J.; Andersen, H.E.; Carson, W.W. Accuracy of a High-Resolution LIDAR Terrain Model under a Conifer Forest Canopy. Can. J. Remote Sens. 2003, 29, 527–535. [Google Scholar] [CrossRef]
- Axelsson, P. DEM Generation from Laser Scanner Data Using Adaptive TIN Models. Int. Arch. Photogramm. Remote Sens. 2000, 33, 111–118. [Google Scholar]
- Axelsson, P. Processing of Laser Scanner Data—Algorithms and Applications. ISPRS J. Photogramm. Remote Sens. 1999, 54, 138–147. [Google Scholar] [CrossRef]
- Burrough, P.A.; McDonell, R.A. Principles of Geographical Information Systems; Oxford University Press: New York, NY, USA, 1998; p. 190. [Google Scholar]
- Toussaint, G.T. Solving Geometric Problems with the Rotating Calipers. In Proceedings of the IEEE MELECON’83, Athens, Greece, 24–26 May 1983; Volume 83, p. A10. Available online: cs.swarthmore.edu (accessed on 1 February 2022).
- Weiss, A.D. Topographic Position and Landforms Analysis. In Proceedings of the Poster Presentation, ESRI User Conference, San Diego, CA, USA, 9–13 July 2001; Volume 200. Available online: jennessent.com (accessed on 1 February 2022).
- Foody, G.M. Status of Land Cover Classification Accuracy Assessment. Remote Sens. Environ. 2002, 80, 185–201. [Google Scholar] [CrossRef]
- Korhonen, L.; Korpela, I.; Heiskanen, J.; Maltamo, M. Airborne Discrete-Return LIDAR Data in the Estimation of Vertical Canopy Cover, Angular Canopy Closure and Leaf Area Index. Remote Sens. Environ. 2011, 115, 1065–1080. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| WKH | Company | n | Total Area (ha) | Mean Area (ha) | Area Range (ha) |
|---|---|---|---|---|---|
| A | 6 | 3.54 | 0.59 | 0.02–2.65 | |
| Rock walls | B | 3 | 0.03 | 0.02 | 0.00–0.02 |
| Total | 9 | 3.57 | 0.40 | 0.00–2.65 | |
| A | 5 | 15.93 | 3.19 | 0.40–6.84 | |
| Stream gorges | B | 1 | 2.01 | 2.01 | - |
| Total | 6 | 17.94 | 2.99 | 0.40–6.84 |
| Score | Detection Rate | Omission Errors | Commission Errors |
|---|---|---|---|
| 1 | 5 (6) | 4 (2) | 17 |
| 2 | 7 (8) | 2 (0) | 9 |
| 3 | 7 (8) | 2 (0) | 1 |
| Score | Detection Rate | Omission Errors | Commission Errors |
|---|---|---|---|
| 1 | 10 (11) | 5 (3) | 6 |
| 2 | 12 (13) | 3 (1) | 2 |
| 3 | 12 (13) | 3 (1) | 1 |
| Score | Detection Rate | Omission Errors | Commission Errors |
|---|---|---|---|
| 1 | 5 | 1 | 5 |
| 2 | 5 | 1 | 9 |
| 3 | 4 | 2 | 13 |
| ALS Aspect | Ground Reference Aspect | |||
|---|---|---|---|---|
| North | East | South | West | |
| North | 3 | |||
| East | 4 | 3 | 1 1 | |
| South | 1 | |||
| West | 1 | |||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ørka, H.O.; Jutras-Perreault, M.-C.; Candelas-Bielza, J.; Gobakken, T. Delineation of Geomorphological Woodland Key Habitats Using Airborne Laser Scanning. Remote Sens. 2022, 14, 1184. https://doi.org/10.3390/rs14051184
Ørka HO, Jutras-Perreault M-C, Candelas-Bielza J, Gobakken T. Delineation of Geomorphological Woodland Key Habitats Using Airborne Laser Scanning. Remote Sensing. 2022; 14(5):1184. https://doi.org/10.3390/rs14051184
Chicago/Turabian StyleØrka, Hans Ole, Marie-Claude Jutras-Perreault, Jaime Candelas-Bielza, and Terje Gobakken. 2022. "Delineation of Geomorphological Woodland Key Habitats Using Airborne Laser Scanning" Remote Sensing 14, no. 5: 1184. https://doi.org/10.3390/rs14051184
APA StyleØrka, H. O., Jutras-Perreault, M. -C., Candelas-Bielza, J., & Gobakken, T. (2022). Delineation of Geomorphological Woodland Key Habitats Using Airborne Laser Scanning. Remote Sensing, 14(5), 1184. https://doi.org/10.3390/rs14051184