In order to explore the feasibility of the above detection method of the NLOS moving target, we carried out simulations and experiments. The results are analyzed and summarized in detail as follows.
4.1. Simulation Results
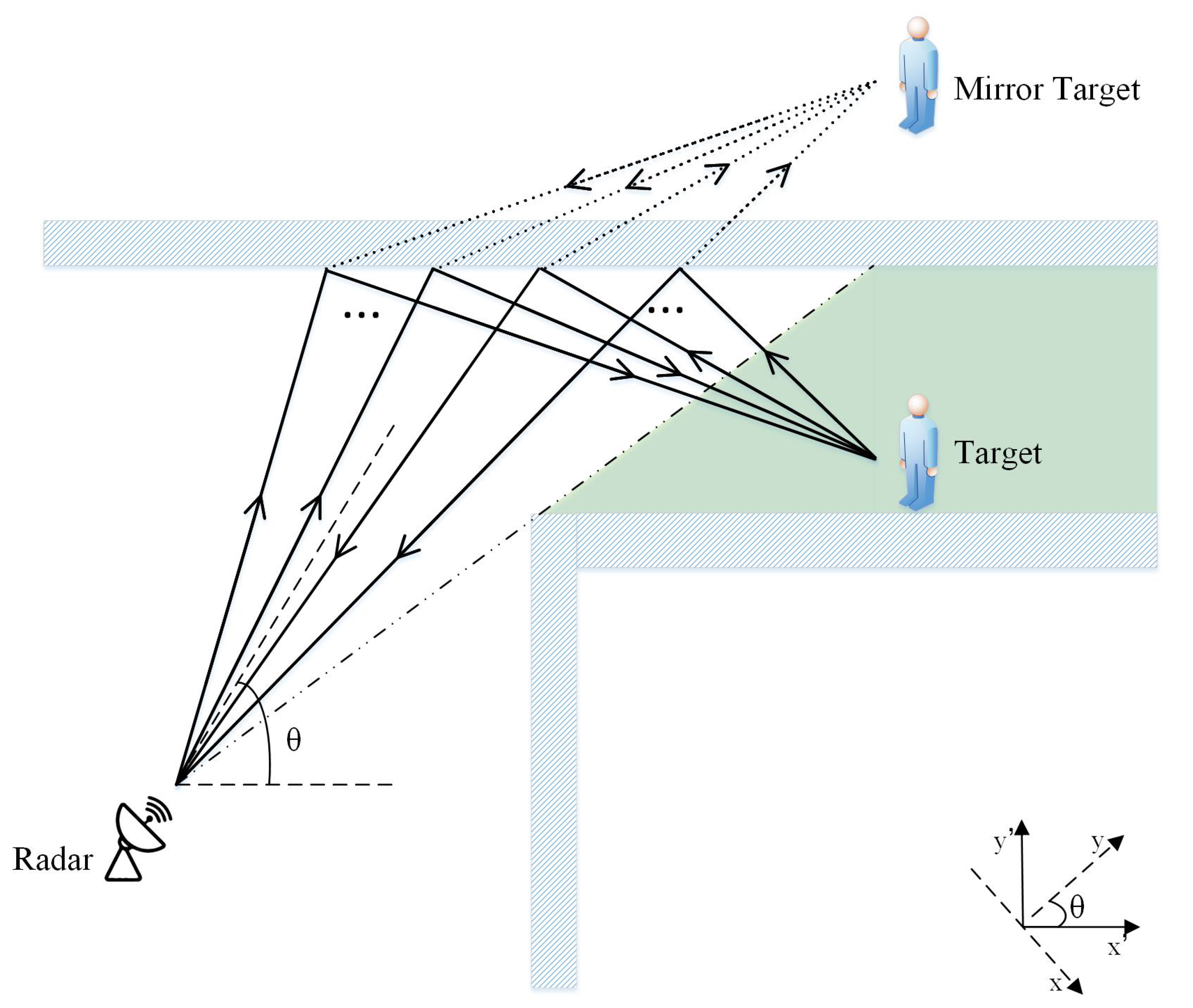
We build the simulation scene as shown in
Figure 4. There is a moving target (M) and a stationary target (S) in the scene, and the velocity of the moving target is 5 m/s. Set the radar working mode as one transmitter and four receivers, and the distance between adjacent receiving antennas is half the wavelength. The 128 continuously received echo signals are regarded as one frame. We have set up two coordinate systems, the radar coordinate system and the geodetic coordinate system, which are shown in
Figure 4. The simulation parameters are shown in
Table 3, where the target coordinates are based on the geodetic coordinate system.
According to the principle of range estimation and velocity estimation, the range resolution and velocity resolution can be calculated.
According to the range gating technology proposed in this paper, in the simulation scene, the length of the echo path of the NLOS target satisfies
Considering that the range resolution of this scene is 0.25 m, the echo path length range of the NLOS target is approximately 8∼14 m.
According to the NLOS target echo signal model proposed in this paper, the signal received by the radar receiver includes target echo, direct backscattered signal from the intermediate interface and noise interference. In order to verify the effectiveness of the model, the target echo signal and the direct backscattered signal from the intermediate interface are simulated, respectively.
Firstly, the NLOS target echo signal is obtained by simulation, on which the detection method is applied to estimate the target parameters. The results are shown in
Figure 5. It can be seen from the result that after two-dimensional FFT, there are two obvious targets in the range-Doppler domain. One target is a stationary target, and the other is a moving target with a velocity of about 5 m/s. Then, through CFAR detection and clustering, the parameters of the target are estimated. The stationary target is located at a distance of 10.13 m from the radar at an angle of 2.0
, and the moving target is at a distance of 9 m from the radar at an angle of 4.5
. There exists an error in the final positioning of the target, which is mainly due to low resolution and multipath effects.
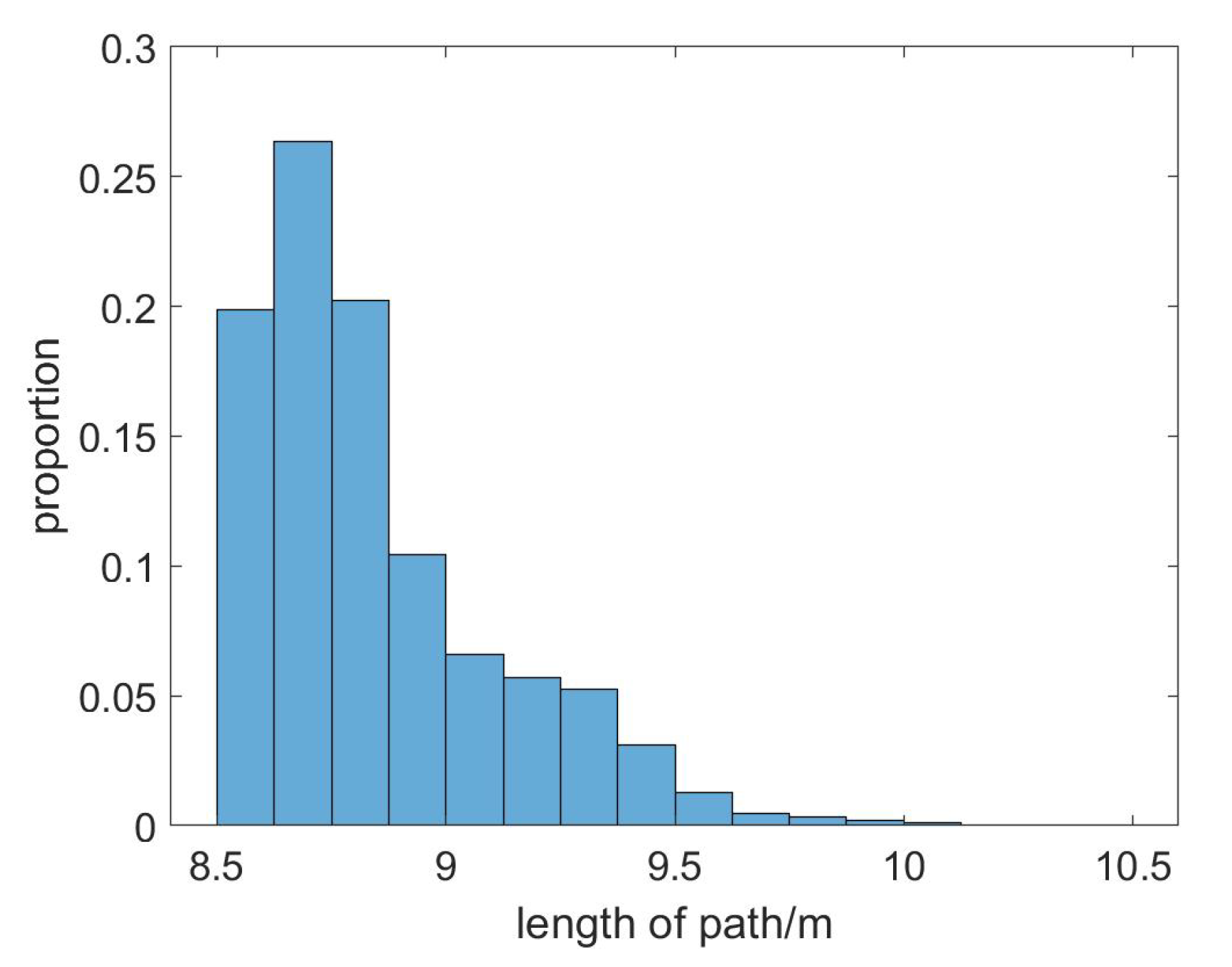
The path lengths of the echo signal of the target M are counted, and the path lengths distribution is shown in
Figure 6. It can be seen that due to the multipath effect, the path length between 8.625 and 8.875 accounts for a relatively large portion. This length is greater than the direct distance between the radar and the mirrored target. In addition, the range resolution of the radar is 0.25 m. Therefore, the target distance estimated is slightly larger than the actual target distance.
For the direct backscattered signal from the intermediate interface, the same data processing method is applied as the target echo signal. The result is shown in
Figure 7. It can be found that the direct backscattered signal from the intermediate interface forms an obvious stationary target point in the range-Doppler domain. Further, after CFAR detection and clustering, it can be obtained that the target is located at a distance of 5.5 m from the radar and the angle is 0
. Obviously, the intermediary interface was mistakenly detected as a target point. In other words, the direct backscatter of the intermediate interface causes fake targets in the detection results.
In the above, the range of the echo path length of the NLOS target is calculated between 8 m and 14 m. Obviously, the distance parameter of the fake target caused by the intermediate interface is not within this range. The path lengths of the direct backscattered signal are counted, and the histogram of the path length distribution is shown in
Figure 8.
It can be seen from the figure that there are very few direct backscattering paths longer than 8 m. Therefore, if the distance gate outside the distance range is closed, the interference of direct backscatter can be greatly reduced.
In order to observe the effects of the polynomial fitting denoising method and the range gating technique more intuitively, the target detection results with and without denoising methods are shown and analyzed, respectively.
In the simulation scene, the echo signal received by the radar includes the echo signal of two targets, the direct backscattered signal of the intermediate interface and the noise interference. The NLOS target detection method without denoising operations is applied to process the signal, and the results are shown in
Figure 9.
Obviously, in the range-Doppler domain, there are two strong point targets and one weak point target. CFAR detection method is performed on the range-Doppler domain signal to obtain three targets. After clustering and positioning, two stationary targets and one moving target are obtained. The estimated target parameters are shown in
Table 4. Obviously, the two strong targets detected are the target points set in the scene. The stationary target located at 10.13 m is the target S, and the moving target located at 9 m is the target M. The weak target at 5.5 m is a fake target caused by the direct backscattered signal from the intermediate interface.
In order to reduce the impact of direct backscatter from the intermediate interface, the range gating technology is used to close the distance gate outside the range of the target’s echo signal path length. The results are shown in
Figure 10.
From the results, it is easy to find that there are only two obvious target points in the range-Doppler domain signal after the range gating. The influence of the direct backscattered signal from the interface is well eliminated. After clustering, two targets are finally detected, the stationary target (S) and the moving target (M) set in the scene. It can be seen that the fake target caused by the direct backscattered signal of the intermediate interface are completely filtered out. By comparing with the results of the detection method without denoising operations, it can be clearly concluded that the distance gating technology can greatly reduce the noise interference of other distance gates and improve the accuracy of target detection.
In order to detect moving targets more accurately and reduce the influence of static noise, the polynomial fitting denoising method proposed above is applied to eliminate static noise in the range-slow time domain. The results are shown in
Figure 11.
From the results, it is easy to find that three obvious targets can be observed after the range FFT operation in the range-slow time domain. Then, after the polynomial fitting denoising operation, there is only one obvious target left. After applying the velocity FFT operation, there are one obvious moving target in the obtained range Doppler domain signal. CFAR detection is performed after distance gating, and there is only one moving target in the result obtained, and no stationary target. After using the MUSIC algorithm to estimate the angle of the target, the location of the target can be further determined. The distance of the target is estimated to be 9 m, the speed is estimated to be 5.015 m/s, and the angle is estimated to be 4.5. There is only the moving target in the final result. In other words, our NLOS moving target detection method can detect moving targets and filter out the interference caused by stationary targets. By comparing the results with the target detection method that only uses the range gating technology, it can be concluded that the polynomial fitting denoising method can greatly filter out the static noise, so the moving target can be detected more accurately.
In summary, we can draw several conclusions. First of all, the range gating technology can greatly reduce the influence of the direct backscattered signal from the intermediate interface, and filter out the noise outside the target distance range. Secondly, the polynomial fitting denoising method can effectively filter out static noise and detect moving targets more accurately. Finally, although there exists error in the final positioning of the target due to low resolution and multipath effects, the overall results are relatively accurate, indicating that the algorithm can realize the detection and parameter estimation of NLOS moving targets.
4.2. Experimental Results
The actual NLOS scene is more complicated. In order to verify the feasibility of the moving target detection method in the actual scene, we built an actual NLOS scene with the corner reflector as the actual target. The experiments are carried out with a millimeter wave radar, which is shown in
Figure 12. We work with the received data using the NLOS target detection method above and analyze the results.
We build an NLOS scene in a meeting room in the New Main Building of Beihang University, and its abstract geometric model is shown in
Figure 13. There are interference and static noise in the scene. The related parameters are shown in
Table 5.
As shown in
Figure 13, L1 is the length of the guide rail, L2 is the distance from the bottom of the guide rail to the center of the reflection point on the intermediate interface, and L3 is the distance from the radar to the center of the reflection point on the intermediate interface. The center of the reflection point of the intermediate interface is approximately the position of the intermediate interface directly opposite the center of the radar main lobe. In addition, since it is impossible to accurately measure the placement angle of the radar and the placement angle of the guide rail in the actual scene, the angle of the radar and the angle of the target are both roughly estimated.
The actual radar parameters are the same as the simulation parameters, so the range resolution and velocity resolution are also the same as the simulation. The range resolution is 0.25 m and the velocity resolution is 0.4530 m/s.
We mount the corner reflector on the guide rail and set the maximum speed of the guide rail to 1.5 m/s. The switch of the guide rail is controlled by software, and then, the movement of the corner reflector is controlled. The corner reflector moves from one end to another and back, and there is a process of acceleration and deceleration during the time. In this process, the echo signals received by the millimeter-wave radar are derived and processed. In order to verify the effectiveness of the two denoising methods proposed in this paper with actual data, the target detection method with and without denoising operation are respectively applied to one frame of the echoes, and the results are analyzed.
Firstly, the target detection method without denoising operation are applied to process the data, and the results are shown in
Figure 14. The estimated target parameters are shown in
Table 6. From the results, it can be found that after two-dimensional FFT, there are several targets in the range-Doppler domain, which is rather messy. Further, through CFAR detection and clustering, several target points are obtained. Combined with the information of the actual scene, it can be found that the point target with the strongest energy is the moving corner reflector. Other target points are caused by noise interference in the actual scene, which reflects that there exists interference and static noise in the actual scene.
Next, we choose the target detection method with range gating technology to process the data, and the results are shown in
Figure 15. Obviously, after the range gating operation, there exist an obvious moving target and a weak stationary target in the range-Doppler domain signal. After the range gating, the noise interference outside the range of the NLOS target echo signal path length is filtered out. Therefore, the number of targets finally detected is much less than that of the target detection method without denoising operation. Therefore, it can also be reflected that the distance gating technology can greatly reduce the noise interference of other distance gates.
Finally, the polynomial fitting denoising method and range gating technology are both applied to process the data, and the results are shown in
Figure 16. It can be seen from the results of the range FFT that there are noise and other interference in the echo signal received by the radar. After denoising by polynomial fitting, a part of static noise is removed. After velocity FFT and distance gating, an obvious moving target can be observed in the range-Doppler domain. At the same time, there is still weak noise in the signal. After CFAR detection, the moving target is accurately detected. The DBSCAN clustering algorithm is used to process the results of CFAR detection, and finally, the target is located and its velocity is estimated. Finally, it can be detected that the target with a velocity of 1.14 m/s is located at 6.94 m and 8.00
to the left of the center of the radar beam, which is consistent with the scene information. Due to the limitations of hardware equipment, precise target parameters cannot be obtained.
Comparing the results obtained by the above three target detection methods, we can easily find that the range gating technology can filter out all the noise outside the distance range of the NLOS target, which greatly reduces the influence of the direct backscattered signal from the intermediate interface. The polynomial fitting denoising method can filter out static noise and effectively reduce the influence of some static objects in the actual scene. In general, the NLOS target detection method proposed can accurately detect NLOS moving targets and greatly reduce the impact of noise interference, which has been verified in an actual scene.
By comparing the data processing process and results of the simulation and the actual measurement, it can be found that there are some differences, which can be mainly divided into two points. Firstly, the actual experimental environment is more complex. The echoes received by the radar are more cluttered due to the presence of many interfering objects in the scene. Besides, the surrounding wind carried by the moving target will also form clutter interference. Another difference is that the electromagnetic wave propagation in the actual experimental scene has a large loss due to the influence of dust particles and gas molecules in the air, which is not considered in the simulation scene. In the air, the echo signal with a long propagation path has a larger loss than the short path, so the echo signal energy of the mirror reflection propagation path accounts for a larger proportion. Further, the influence caused by the multipath effect is weaker and the target location information of the actual experimental results is more accurate. In conclusion, whether simulation or experiment, the moving target is accurately detected and the static noise is filtered out, which verifies the effectiveness of the NLOS target detection method.
In actual scene, there exists an error in the final positioning of the target. In the actual scene, there are many factors that affect the positioning error. It mainly includes the measurement error of some parameters in the actual NLOS scene, the deviation of the radar placement angle, the multipath effect, and low distance and angle resolution. Although there exist errors in practice, the method still has high accuracy and applicability. Different actual NLOS scenes are built and the echo data are collected by millimeter-wave radar. The NLOS moving target detection method was applied on the echo data of various NLOS scenes. From the results of target detection, the method proposed in this paper can accurately detect the NLOS moving target, which shows that it has good stability and universality. This is related to the denoising method adopted by this paper. In the algorithm proposed in this paper, range gating technology is used to filter out the interference caused by wall backscattering and multiple reflections, and the polynomial fitting denoising method is used to remove the static noise. These two methods do not depend on a fixed scene, and can work well in different NLOS scenes, so that moving objects can be detected accurately.
For the same experimental echo data, we applied the NLOS moving target location algorithm proposed by Zhao Qingsong [
32,
33], and the results are shown in
Figure 17. From the results, it can be seen that after moving target indication (MTI), although the static noise is filtered out, the echo energy of the moving target is also greatly reduced. This algorithm estimates that the distance between the target and the radar is 7 m, which is similar to the distance estimation result of the method proposed in this paper and consistent with the scene information. However, the angle of the NLOS moving target detected by this method is 0.23 degrees by multiple channels’ phase comparison, which is quite different from the actual experimental scene. It shows that the angle estimated by the MUSIC algorithm is more accurate than the multi-channel comparison method. This algorithm procedure is simple and the calculation speed is fast. Compared with this, the NLOS moving target detection method proposed in this paper is computationally slower, due to the lager calculation because of the addition of velocity estimation and the MUSIC method.
By comparing the results of the NLOS moving target detection method proposed in this paper and the NLOS moving target location algorithm, it is easy to find that there are two main differences. Firstly, in the actual NLOS scene, the target angle estimated by the multi-channel comparison method has a large error, while the MUSIC algorithm can locate the target more accurately. The second difference is that the NLOS moving target detection method proposed in this paper can estimate the velocity of the target while detecting and locating the target, which provides support for predicting its motion state. Therefore, the method proposed in this paper is more suitable when the target’s velocity needs to be obtained.
























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}