1. Introduction
The Martian moons, Phobos and Deimos, are of great scientific interest. The origins of these moons remain unclear. They could possibly be captured C-type asteroids or formed from post-impact debris discs of Mars [
1,
2]. If they were asteroids, they might play a role in transporting water to terrestrial planets, such as Mars and the Earth [
3,
4]. Understanding the interior structure of Phobos can put constraints on the formation of Martain moons, as well as that of the early solar system. In addition to the endeavors of Phobos-1 and -2 in the late 1980s, many mission concepts, such as the Phobos-Grunt, PHOOTPRINT, MERLIN, and MMX, for exploring the Martian moons have been proposed and intensively studied by space agencies [
4,
5,
6,
7,
8]. A mothership-CubeSat radioscience mission is proposed in this paper for probing Phobos and supporting autonomous navigation at the Martian distance from the Earth.
Le Maistre et al. [
9] have classified the interior structure of Phobos into four families: rubble pile, heavily fractured, porous, and icy body. The interior structure can be inferred from the moments of inertia (MoI) of Phobos. The MoI is related to the central gravitational parameter,
, 2nd-degree gravity coefficients,
and
, and libration amplitude. A number of flybys performed in past missions (e.g., the Viking, Phobos-2, and Mars Express) provided valuable radio tracking data that elucidated the
of Phobos. One latest
derived radio tracking data during flybys has an uncertainty of 0.3% [
10]. The estimation of Phobos’ ephemeris and 2nd-degree gravity coefficients done by Jacobson and Lainey [
11] shows an 8.7% disagreement on
from that of the homogeneous model, which corresponds to the shape model derived from observed images [
12,
13]. While the accuracies of the estimated
and
were stated to be 6% and 3% [
11], respectively, these results are dependent upon the used quadrupole model of Phobos and the measured libration amplitude (i.e.,
[
14]). The libration amplitude estimated based on images has an uncertainty ranging from 2% to 10%, which is in turn dependent on the used ephemeris data [
14]. A confident accuracy should be evaluated by considering all uncertainties in the model and measurements.
One latest estimation attempt based on radio tracking data has 1-
uncertainties of 8% and 30% on
and
, respectively [
15]. However, accuracies of 3–5% on
,
, and the libration amplitude are desirable for the identification of the interior structure [
9,
16]. Nevertheless, the past radio tracking is subject to the flyby geometry relative to the ground station, and the gravity signature is limited by the short duration (i.e., generally <1 h) and far distance (i.e., generally >80 km) of flybys. Consequently, the gravity coefficients
and
cannot be resolved at an accuracy sufficient for drawing conclusions on the mass distribution [
17]. In addition, Phobos is a secondary body orbiting a primary body, Mars. The gravity and position of the primary can significantly influence the dynamical environment of the secondary as well as the effect of geodesy. Rosenblatt et al. [
18] and Yan et al. [
19] stated that the error of estimated
will increase by a few 10% as the ephemeris error tends to a few 100 m. Furthermore, the ephemeris error can go up to a few kilometers by the time of the MMX mission (i.e., 2025–2027) if the ephemeris is not updated. Chen et al. [
20] also showed the impact of Phobos’ ephemeris errors on spacecraft orbit determination and parameter identification. In summary, ephemeris errors, gravity coefficients, and libration amplitude of Phobos, and orbits of spacecraft are closely correlated in the estimation. It is not only important to enable an observation manner more effective than distant flybys, but also necessary to evaluate the estimation accuracy considering all uncertainties.
Concerning a more effective approach to probing Phobos, there have been several mission concepts and flight plans proposed, the corresponding geodesy performance of which was also evaluated (e.g., [
19,
21,
22,
23]). However, most of the error analyses for the proposed concepts were conducted through analytical covariance analyses. With the high non-linearity related to the flight dynamics and many local optima related to the many variables (e.g., spacecraft orbit states and geodetic parameters) to estimate in the problem, in practice, the theoretical covariance obtained at the global optimum might not be achieved. For the mission proposed in this study, the estimation model is described in
Section 4, based on which the theoretical covariance is computed. Massive estimation simulations, which consider all kinds of uncertainties in the model and measurements, are performed to reveal practical covariance (see
Section 5). The difference between the theoretical and practical covariances can indicate the functionality of the estimation algorithm and the need for statistical examinations. Despite the difference from the theoretical covariance, the low practical covariance indicates an excellent possibility to distinguish families of interior structures (see
Section 6).
The proposed mission concept is designed to feasibly support the desired geodesy and the entire mission. NanoSats have started to play a role in planetary missions. As they are small and low-cost, they can be carried by a mother spacecraft and then deployed to perform audacious flight or landing, or cooperative operations along with the mother spacecraft. There have been several planetary NanoSat missions, such as Philae, MASCOT, MarCo, HERA-Juventas, HERA-Milani [
24,
25,
26], and ideas (e.g., [
23,
27,
28,
29,
30]). It is proposed in this paper that a CubeSat is carried and deployed by the mother spacecraft aimed for Phobos. The two probes will fly in different quasi-satellite orbits about Phobos, and perform inter-satellite Doppler measurements (see
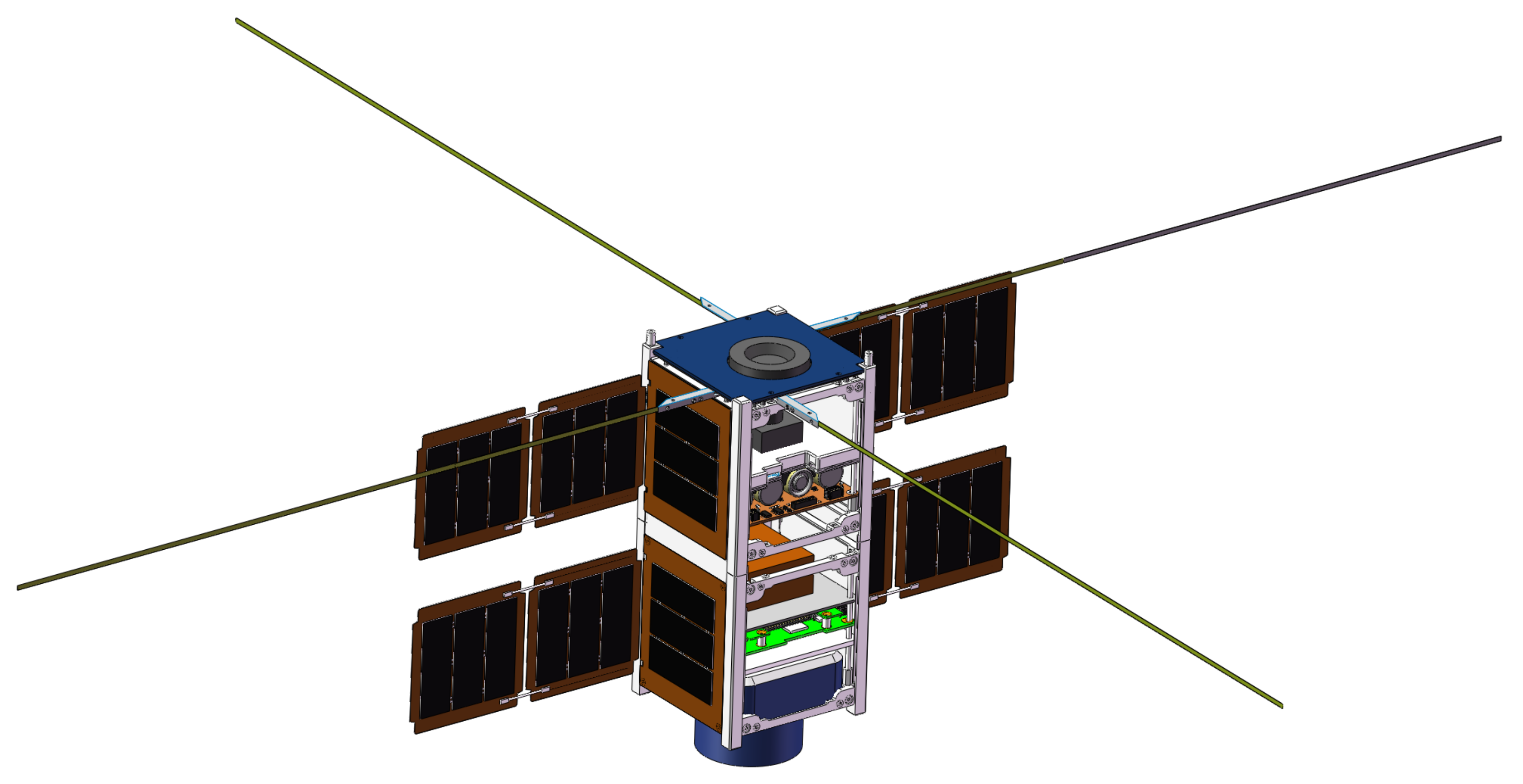
Section 2). The advantage is multiple-fold. First, the measurement is independent of the ground station and thus can support autonomous navigation, and consequently, enhance the safety of the main mission. Second, the longduration proximity orbiting will bear an evident signature of the geodetic characteristics of Phobos. As for feasibility, this paper analyzes budgets of volume, mass, power, deployment
, and link, and the measurement noise of the system, and gives a detailed design of the CubeSat (see
Section 3).
2. Mission Profile and Orbits
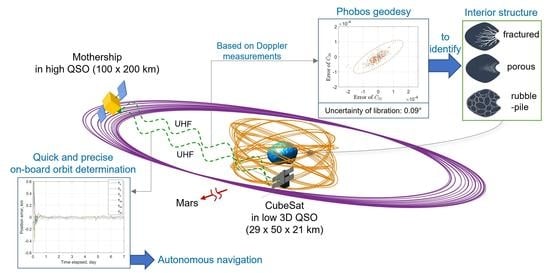
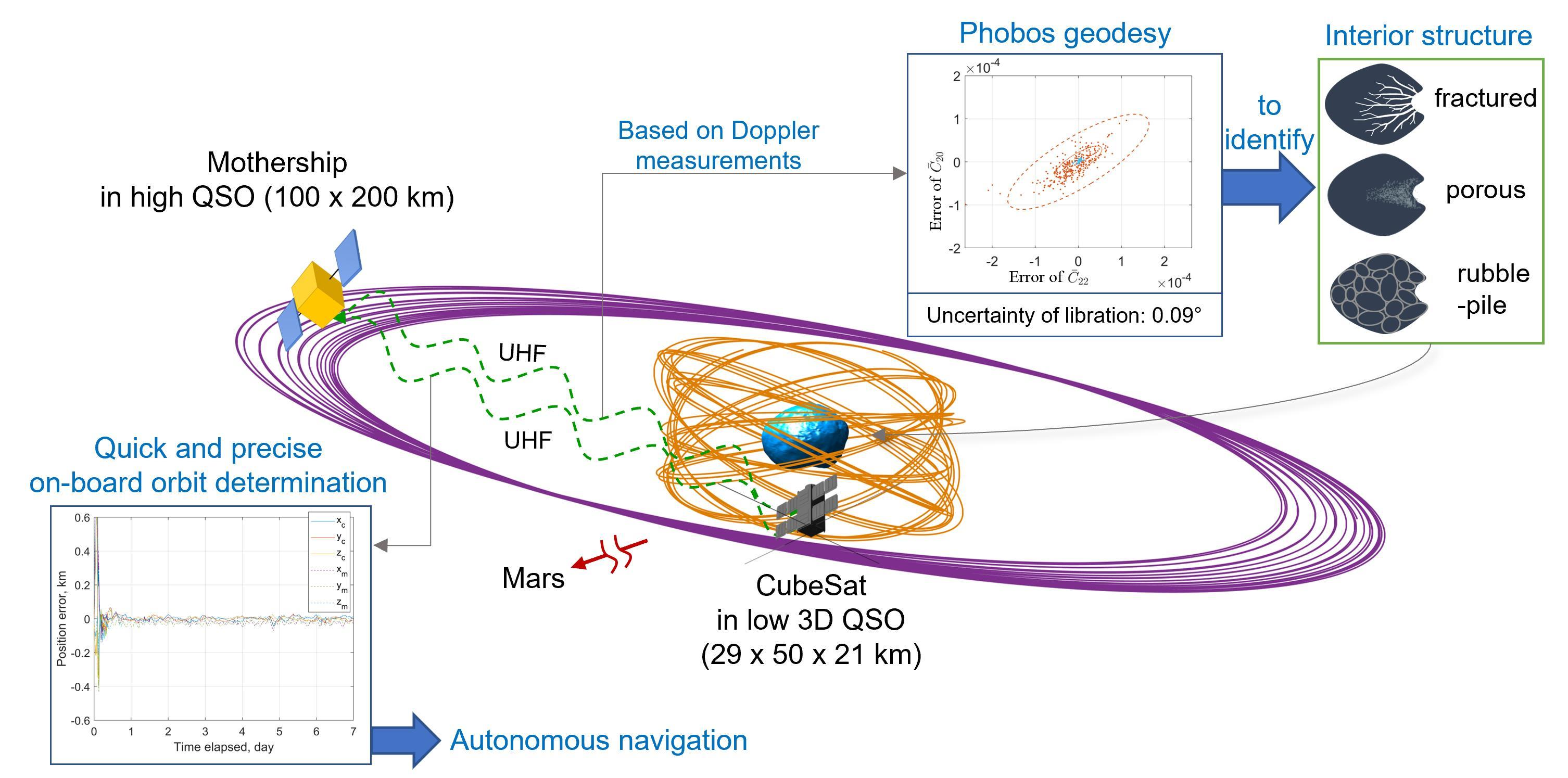
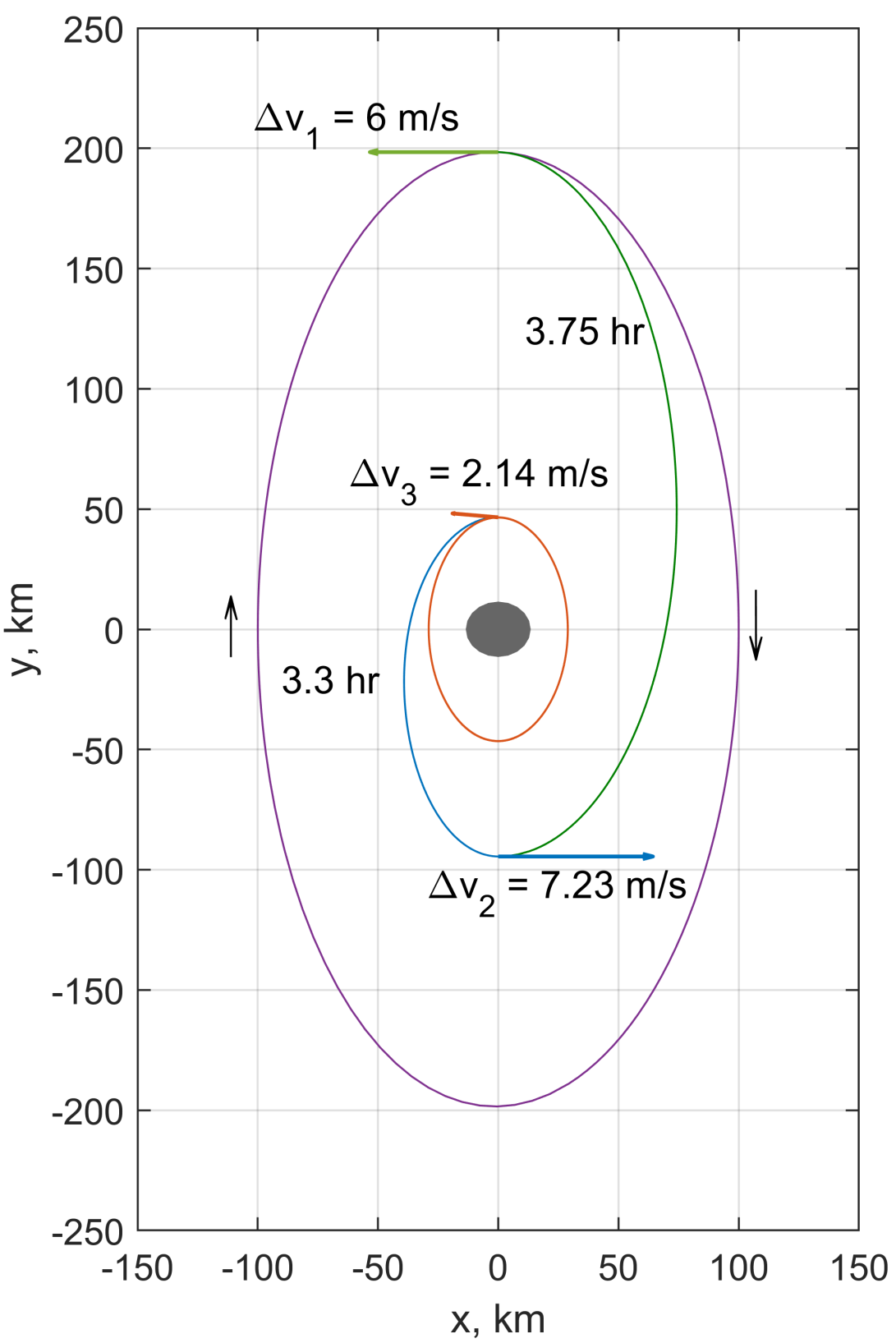
It is proposed that the CubeSat boards the mother spacecraft aimed for Phobos. As precise knowledge on the target is lacking in the beginning, it is preferred that the less indispensable CubeSat is deployed from the mothership to a low-altitude orbit about Phobos, which is sensitive to geodetic parameters of the target, while the mothership stays in a high orbit, which is safe from escape and impact on the target. The two-way Doppler measurement is performed between the two orbiting probes, where the radio signal is triggered by the mothership and reflected by the CubeSat.
Section 3.2 will give details on this setup. Based on the inter-satellite measurements, spacecraft orbits can be determined, and the geodetic characteristics of Phobos can be identified.
Figure 1 schematically depicts the proposed radioscience mission.
The irregularily shaped Phobos has dimensions of
km. As it is much more smaller than Mars, whose dimension is 6780 km, and orbits closely (i.e., with a semi-major axis of 9377.2 km) around Mars, dynamics in its vicinity is dominated by the gravity of Mars. The sphere of influence of Phobos is small and even below its surface. Therefore, classical Keplerian orbits do not exist around Phobos. The retrograde quasi-satellite orbit (QSO) found in the Mars-Phobos three-body problem is a means for spacecraft to orbit around Phobos in the sense of relative motion [
31,
32]. Previous work has computed a database of periodic three-dimensional QSO (3D QSO) around Phobos in the circular-restricted three-body problem (CR3BP) [
33,
34].
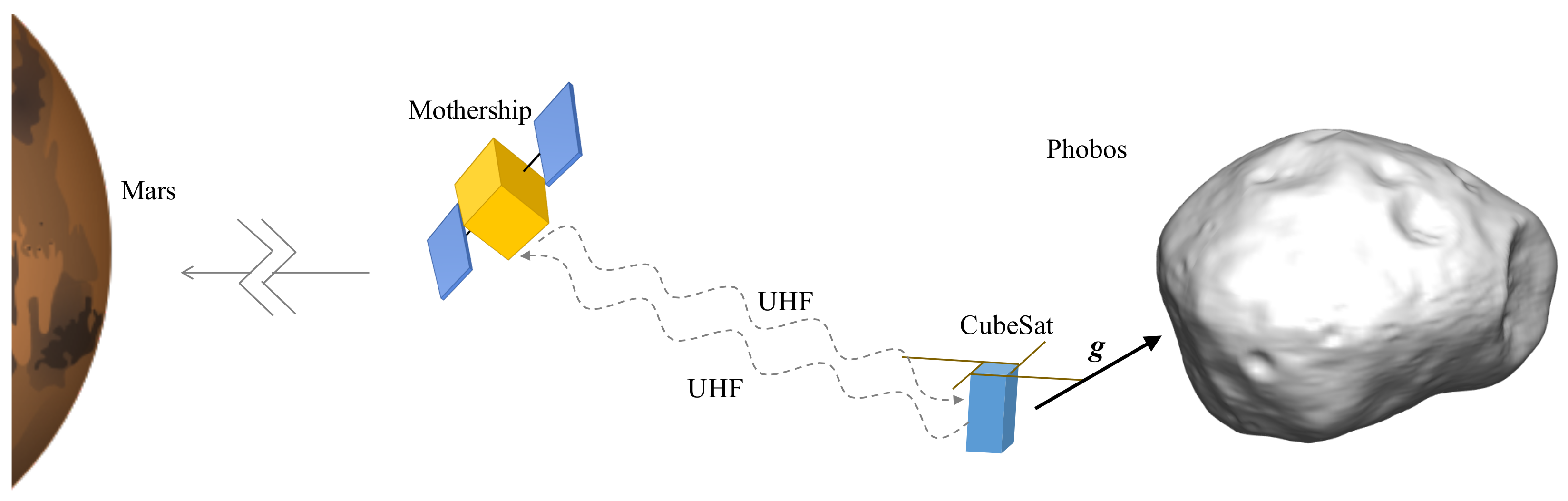
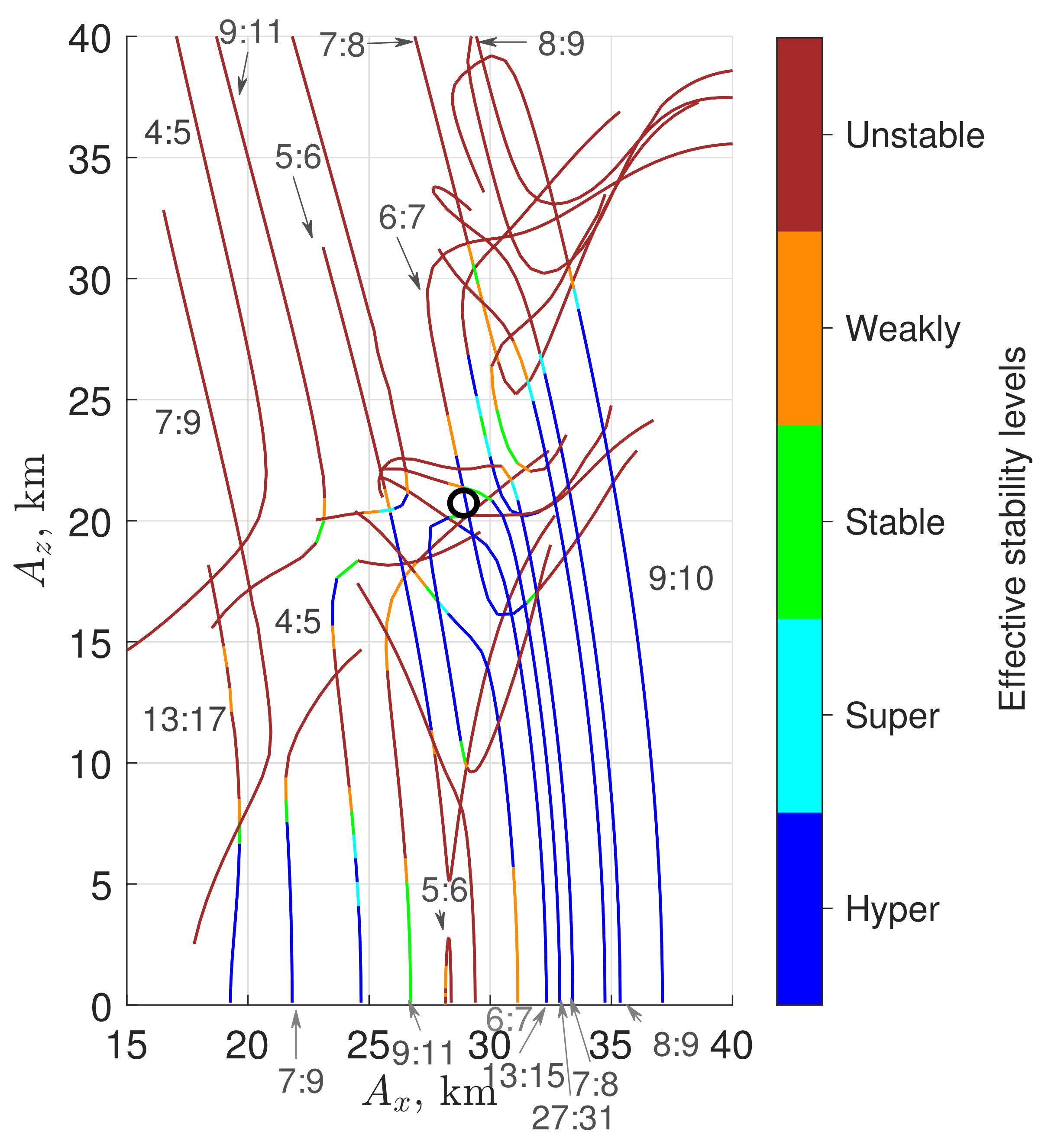
Figure 2 presents families of periodic QSO described by the x-amplitude,
, and z-amplitude,
. The sensitivity of the orbits to the injection epoch, presumed ground-based orbit determination error (i.e., 1-
50 m and 3 cm/s on each component), and
execution error (i.e., 1-
1.4 cm/s on each component) has been investigated by propagating the orbits for one week in the presence of the perturbations [
34,
35]. The color scale in the
Figure 2 represents the effective stability of the QSO according to results of sensitivity analyses, which reveals the stability region of bounded orbits around Phobos. The super- and hyper-stable orbits can stay bounded for an acceptable duration (i.e., >7 days) in the high-fidelity model. Low-altitude orbits are generally sensitive to the gravity field of the target, and high-inclination orbits are particularly sensitive to the zonal gravity harmonics [
16,
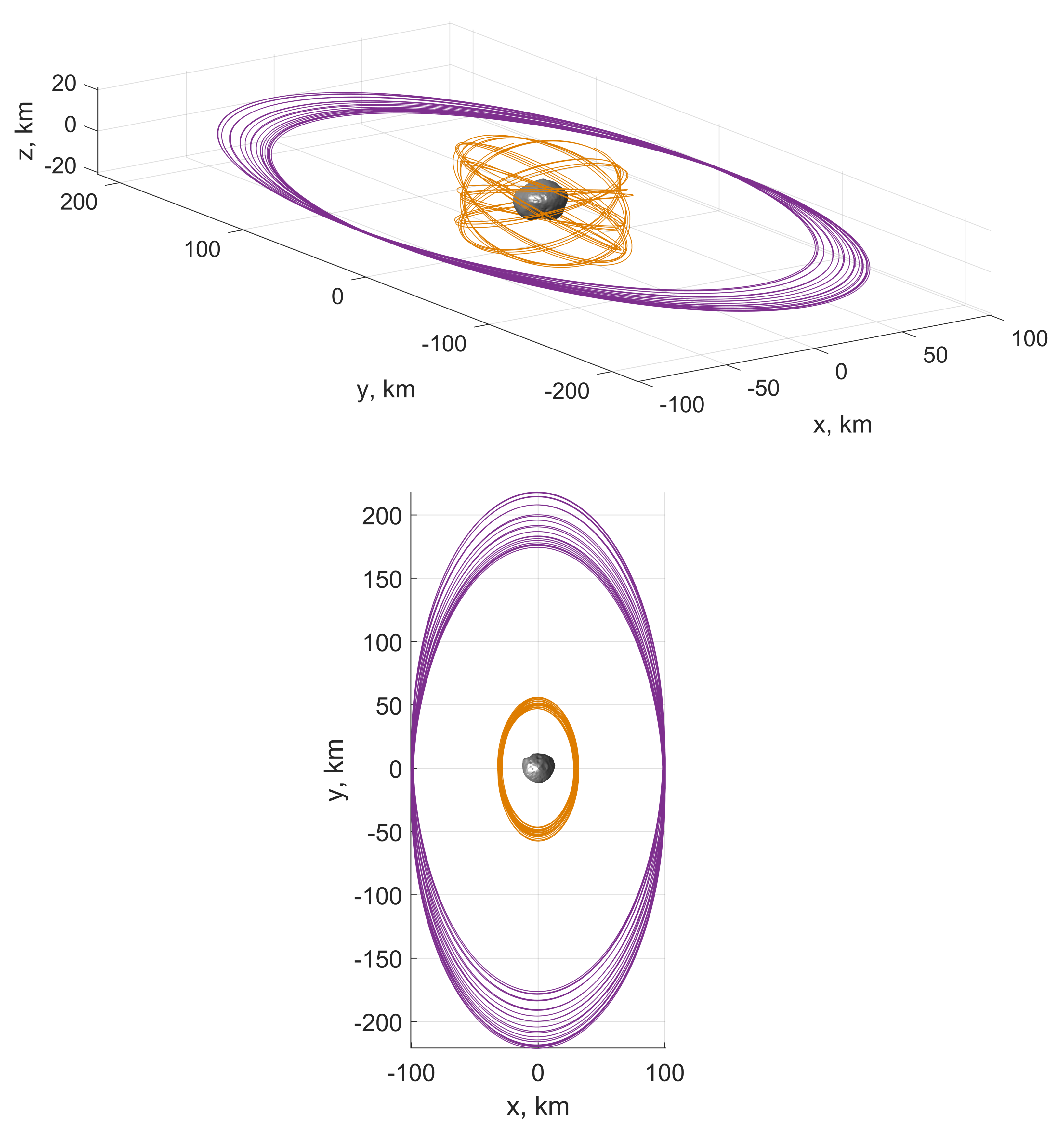
22]. Therefore, a low-altitude and high-inclination 29 × 50 × 21 km (in
format, where
is the y-amplitude) 3D QSO, which is marked with a black circle and indicated hyper-stable in
Figure 2 and shown to be easily maintainable in Refs. [
34,
36], is chosen as the candidate science orbit for the CubeSat. For the mothership, a high 100 × 200 km (
) planar QSO, which is safe from escape and impact, is adopted.
6. Effect of Inferring Interior Structure
and
are related to the MoI of the target. Let
,
, and
represent the principle MoI,
M the mass, and
the reference radius of Phobos. Then, let
A,
B, and
C represent the normalized MoI,
,
, and
, respectively. The relationship between 2nd-degree gravity coefficients and MoI is expressed as:
The libration amplitude
[rad] is in related to the flatting
, which is expressed as [
50]:
where
is the orbital eccentricity of Phobos. Equations (7)–(9) can be rewritten as:
Accordingly, the baseline MoIs are , , and .
The small error of
is negligible in influencing the MoI. To relate errors of
,
, and
to errors of MoI, differential equations are derived as follows,
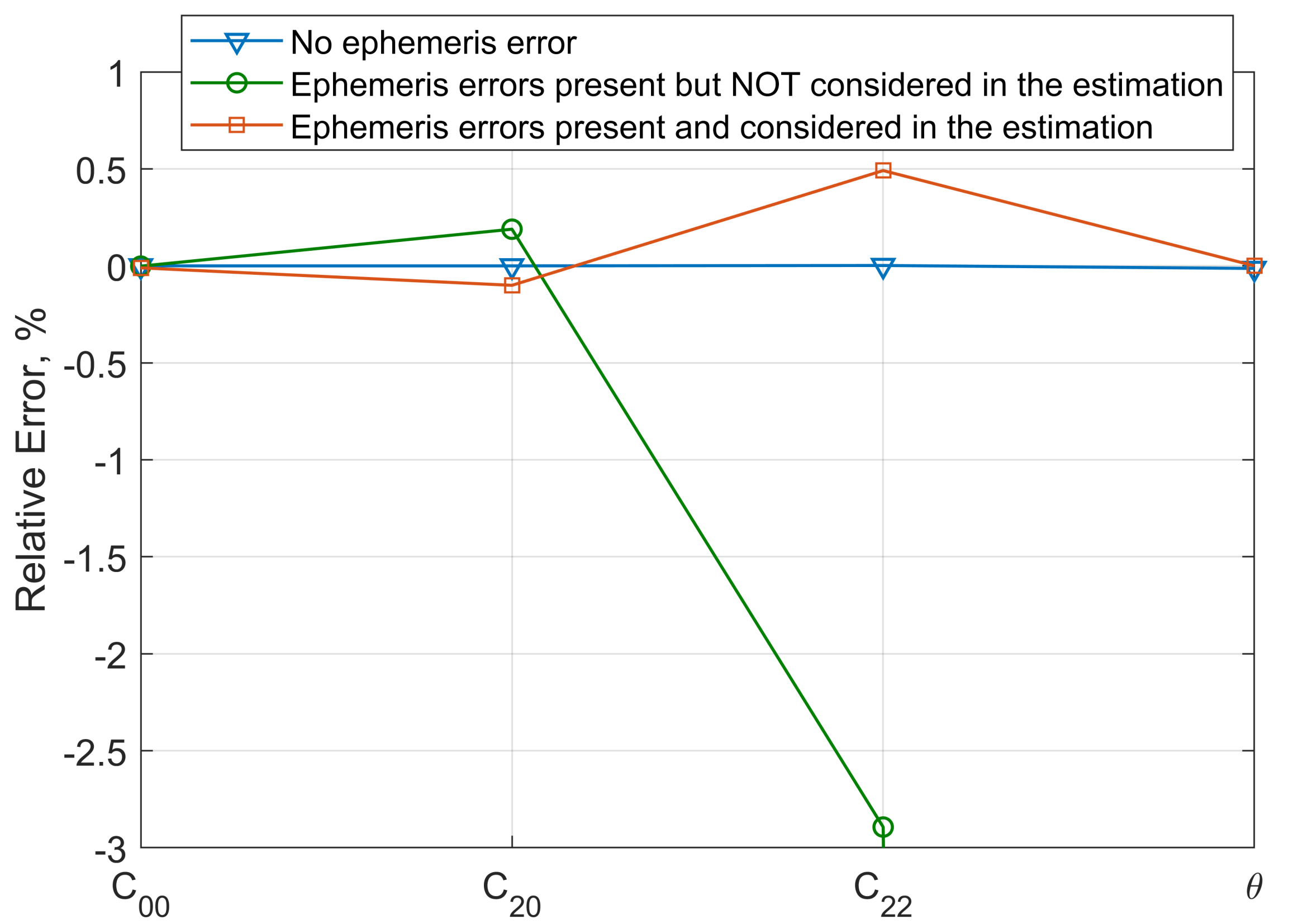
The Jacobian matrix in Equation (13) indicates that
and
are three to four times more influential than
at the same level of relative error, given the baseline values of the parameters. Let
represent the Jacobian matrix. The covariance of the MoI variables on the left-hand side,
, is related to the covariance of the parameters on the right-hand side,
as:
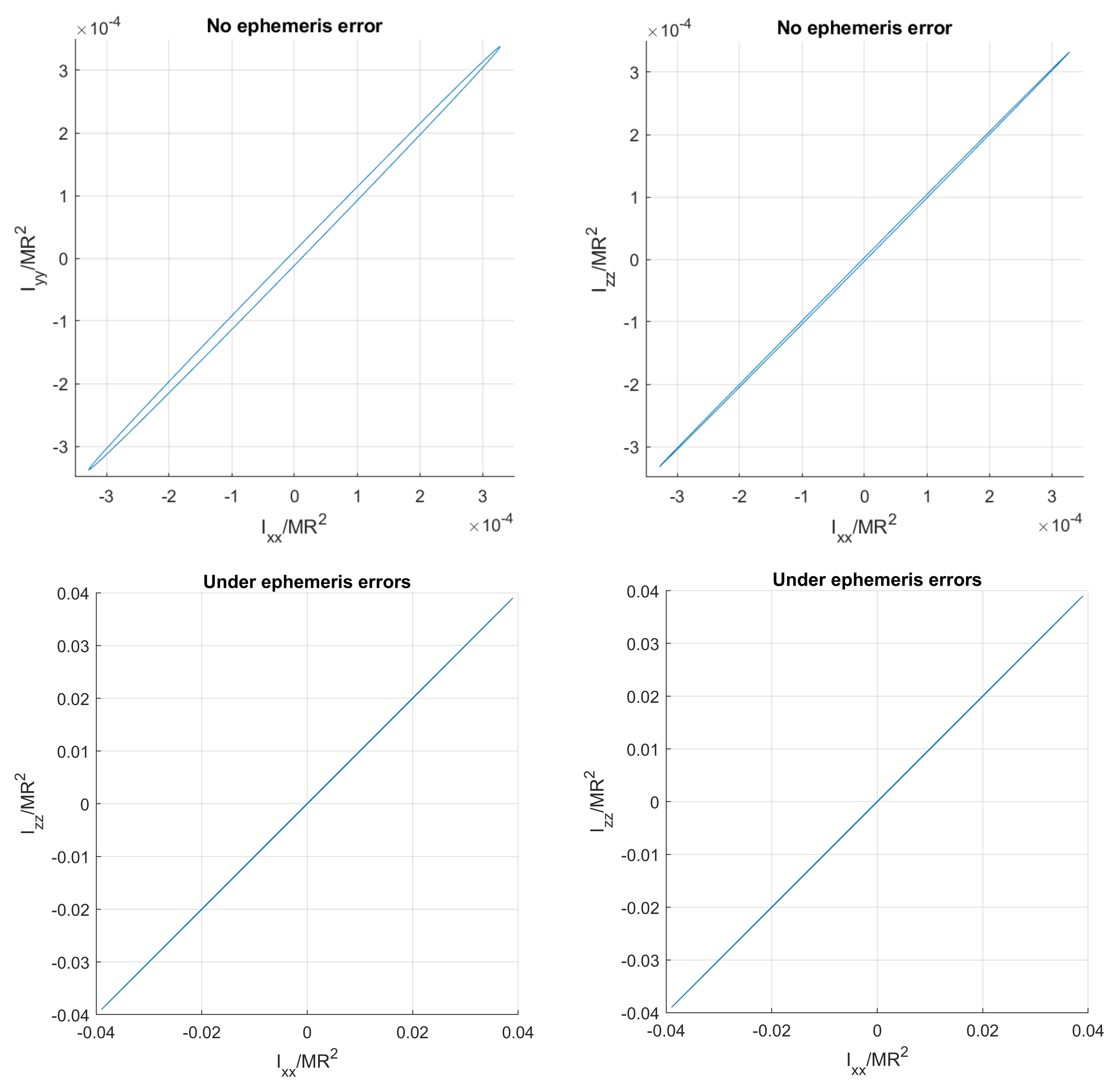
The previous subsection has deduced
from the statistical result. The covariance of MoI is computed from Equation (14) and depicted in
Figure 12. When there is no ephemeris error, the accuracy of MoI is as good as
(i.e., 0.9‰). When the ephemeris error is present, the 1-
uncertainty of each normalized MoI is around 0.04 (i.e., 10%), mainly contributed by the
error. This resolution of MoI cannot directly distinguish families of the interior structure. However, according to Le Maistre et al. [
9], the MoI distributions of heavily-fractured and porous-compressed families behave in an opposite way (for details, see
Figure 8 of Ref. [
9]). Therefore, the near-proportional error distribution exhibited in
Figure 12 can distinguish these two families of interior structures.
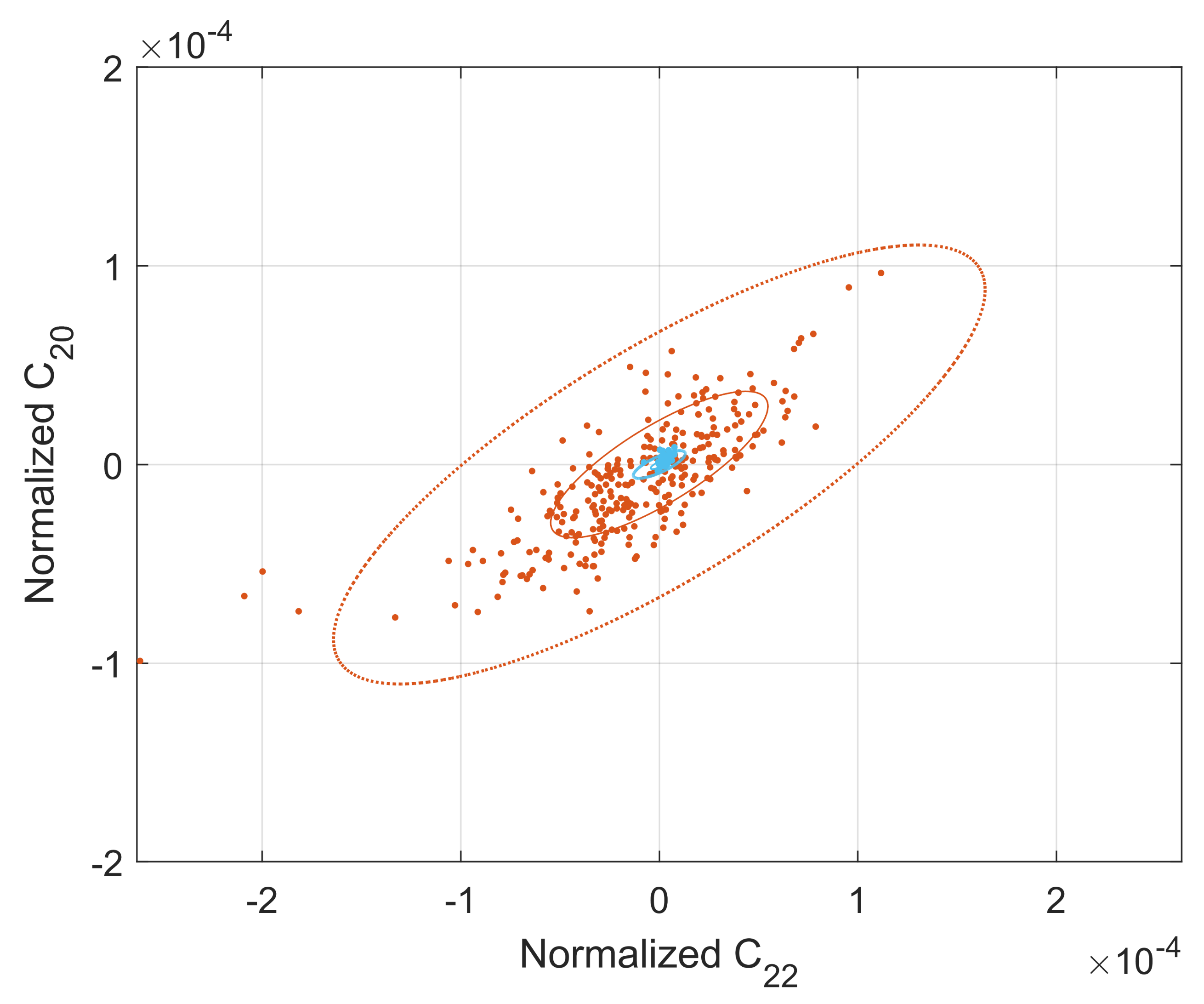
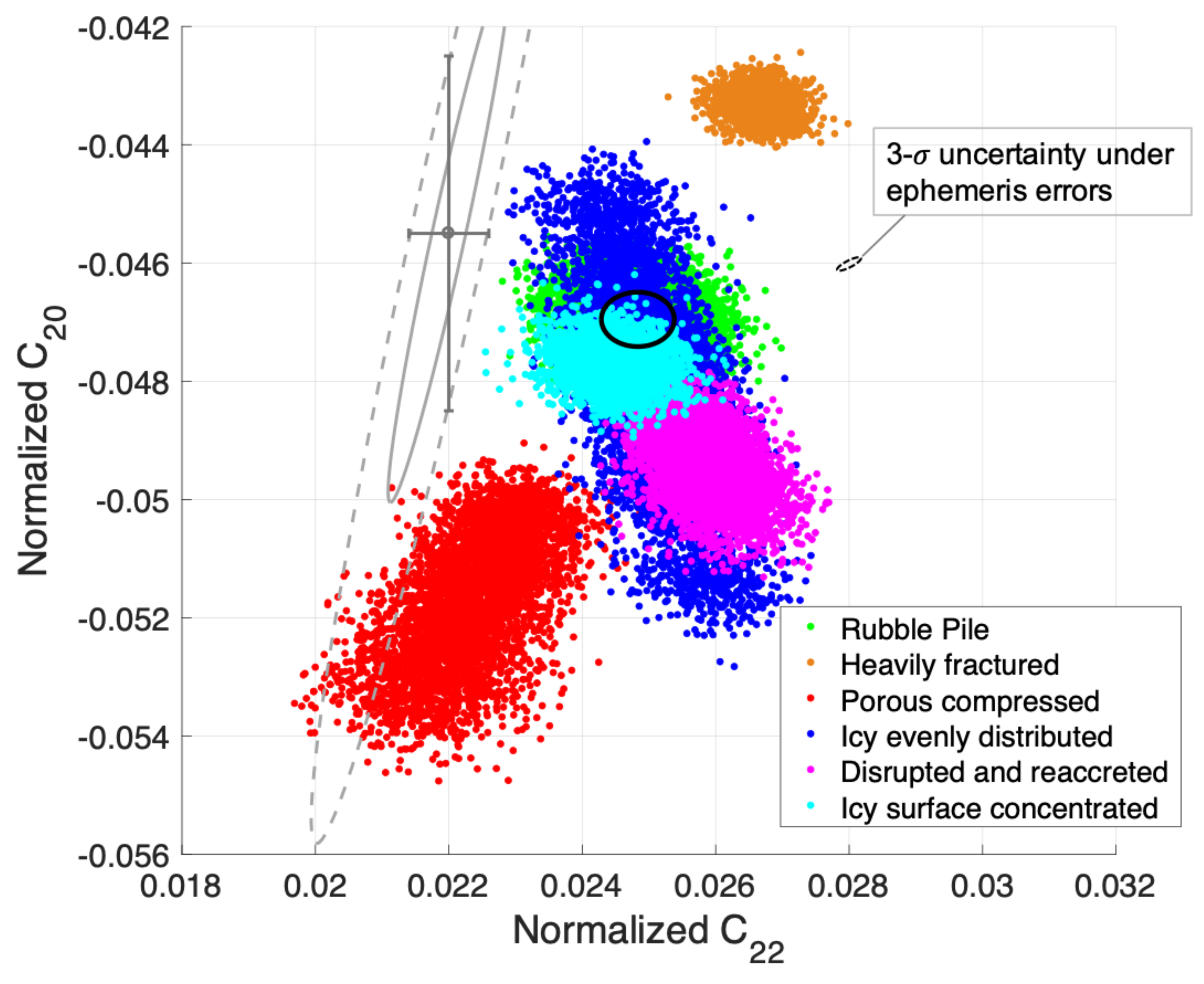
Le Maistre et al. [
9] also computed the distribution of different structure families over
and
. The uncertainty ellipse in
Figure 11 is placed on the distribution map from Ref. [
9], which is shown in
Figure 13. Because of the comparably tiny sizes of the uncertainties obtained in this work, only the 3-
uncertainty ellipse under ephemeris errors is shown. Errors of the estimated
and
are constrained in this ellipse for the ephemeris error up to 2 km. Given this comparably tiny margin, we can separate the possibility of heavily fractured, porous compressed, and the families in the middle of the map, and distinguish the disrupted-and-reaccreted family from the icy-surface-concentrated and rubble-pile families, regardless of the true values of the parameters.
7. Conclusions
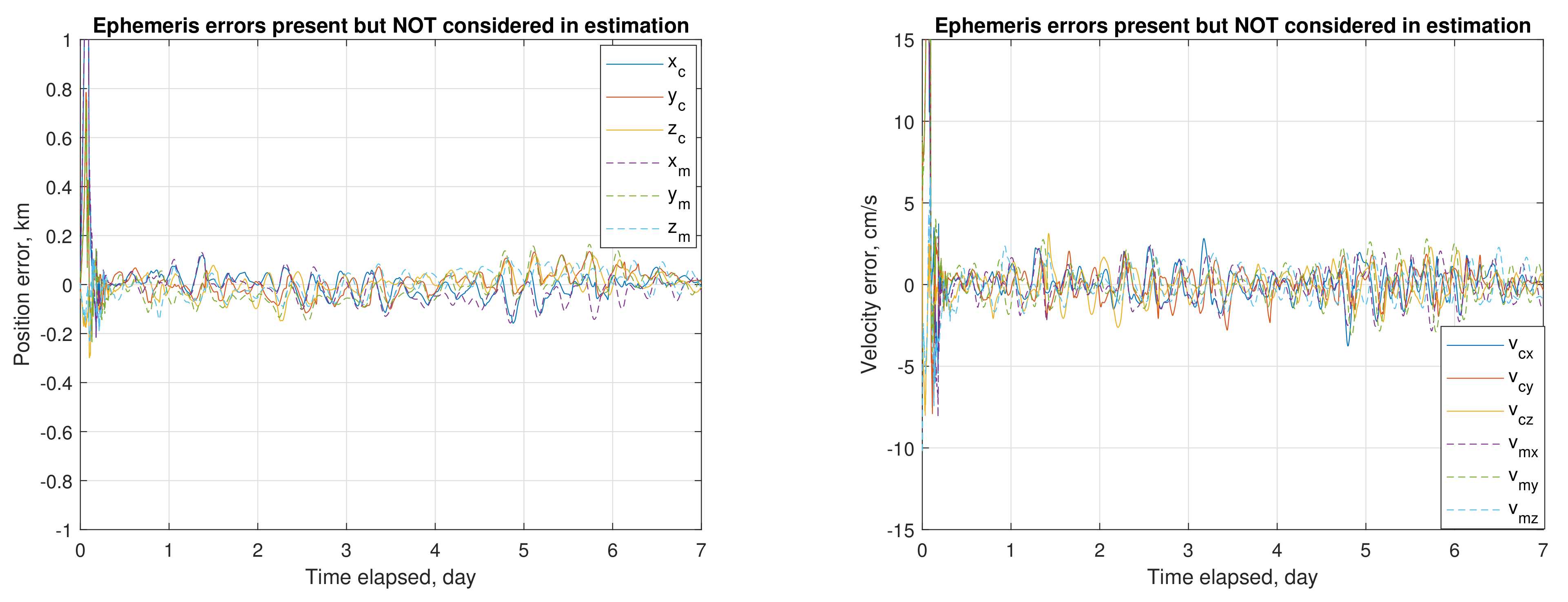
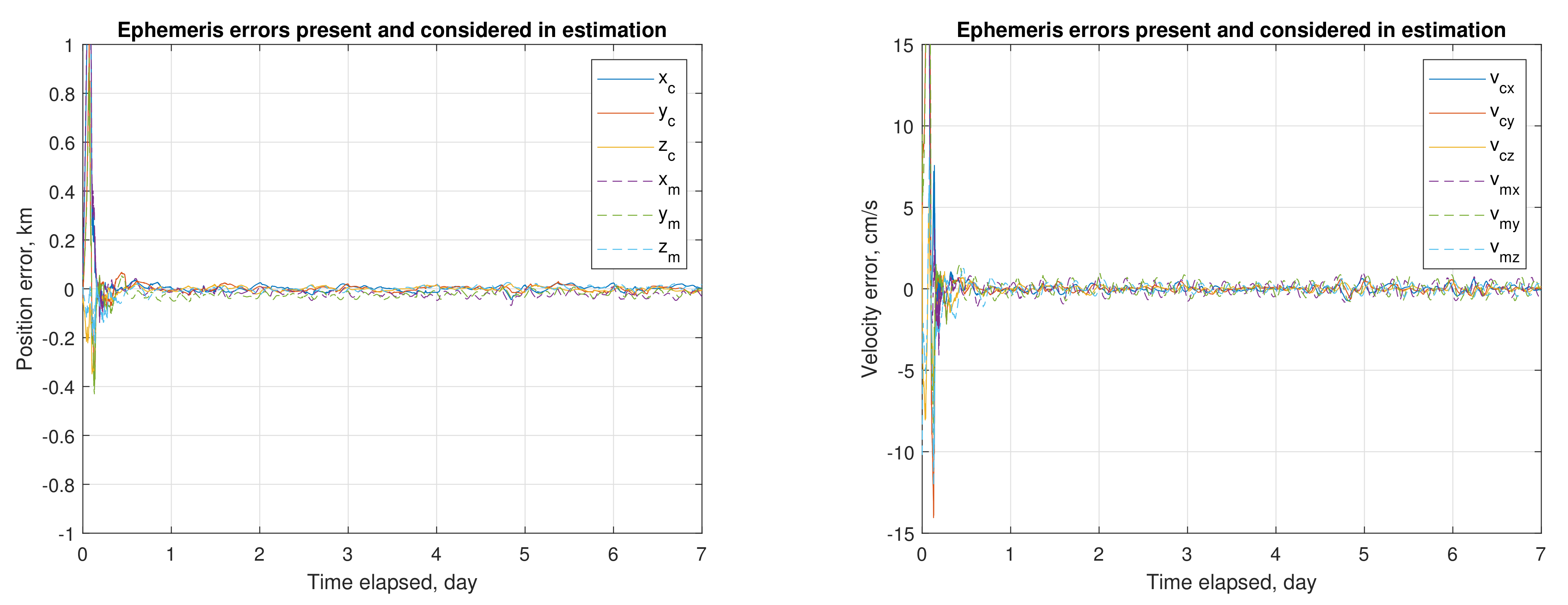
A mothership-CubeSat radioscience mission was proposed to probe Phobos and support autonomous navigation. The two probes are placed in a high (e.g., km) quasi-satellite orbit (QSO) and a low three-dimensional (e.g., km) QSO about Phobos, respectively. The operation plan and system design were given to meet requirements of power, deployment , and Doppler measurement. The presented analysis of geodesy and orbit determination takes into account errors in the measurements and model, including the ephemeris error. Practically achievable estimation uncertainty was revealed via the Monte-Carlo simulation. The moderate difference between the practical and theoretical uncertainties suggests the functionality of the estimation algorithm and the need for verification via the statistical numerical analysis.
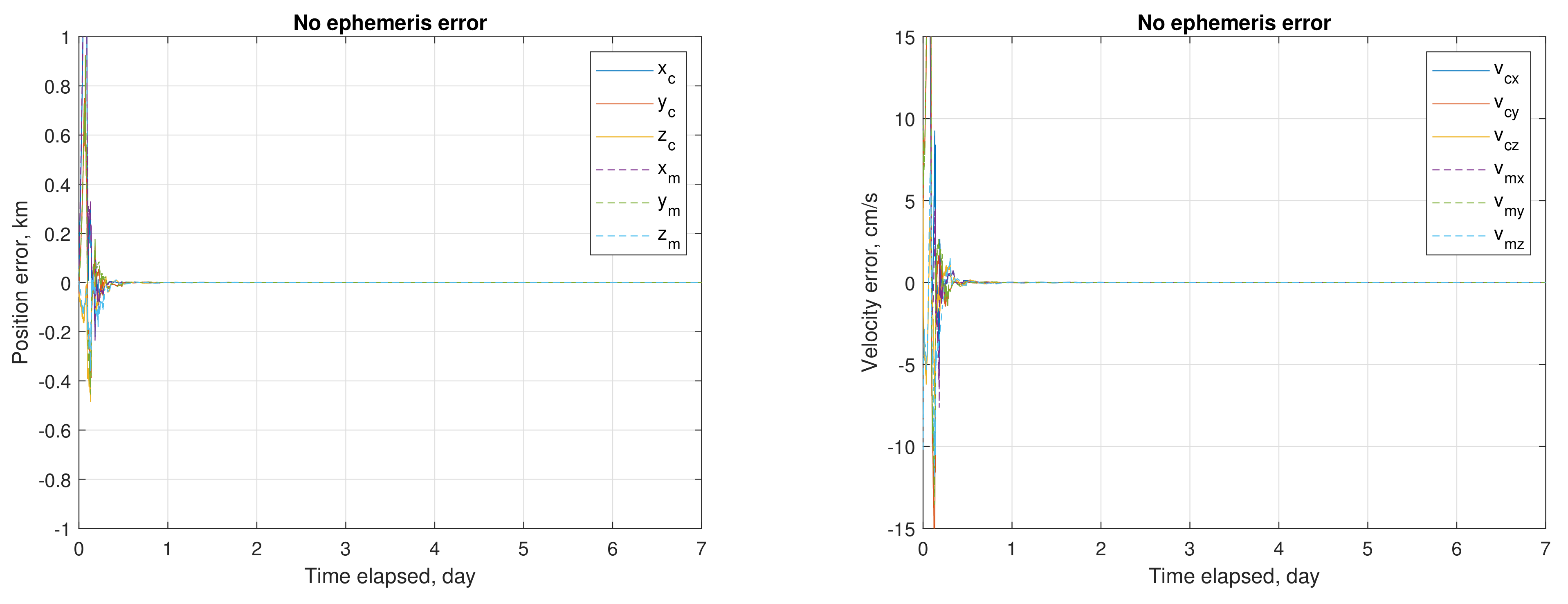
Evident impacts of ephemeris errors on orbit determination and geodesy were observed. Nevertheless, these impacts were substantially reduced by considering the ephemeris error in the estimation. The RSS orbit uncertainties under no ephemeris error are 0.2 m and 0.05 mm/s. The uncertainties increase to 21 m and 0.4 cm/s when an ephemeris error of approximately 2 km is present. This accuracy is still better than the presumed accuracy of ground-based orbit determination (i.e., RSS 86 m and 0.5 cm/s). Thus, the proposed approach can support autonomous orbit determination and rapid (i.e., <1 day) orbit maneuvers in the proximity of the target, and can tolerate ephemeris errors up to a few kilometers.
Even under the ephemeris error, the uncertainties of and recovered from the proposed mission are as small as 0.7‰ and 1.9‰, respectively. However, the a posteriori uncertainty of libration amplitude, 8.3%, is not significantly improved from the a priori, 10%. This uncertainty contributes to an uncertainty of 10% in the moment of inertia of Phobos. As the identification of libration is susceptible to the ephemeris error, for high precision of the libration amplitude and the moment of inertia, it is recommended to update the ephemeris of Phobos before the radioscience campaign. Uncertainties achieved in this work are so far the lowest among values obtained in past radioscience campaigns and future mission concepts verified in high-fidelity simulations. The obtained covariance of geodetic parameters can distinguish the porous-compressed interior structure from the heavily-fractured family, and the disrupted-and-reaccreted one from the icy-surface-concentrated and rubble-pile families, regardless of the true values of the parameters.

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}