
Assessment of RTK Quadcopter and Structure-from-Motion Photogrammetry for Fine-Scale Monitoring of Coastal Topographic Complexity


Abstract
:1. Introduction
1.1. High-Resolution Topographic Surveying and Photogrammetric Remote Sensing of Coastal Morphology
1.2. Photogrammetric Workflow Optimisation
1.3. Paper Overview
2. Materials and Methods
2.1. Field Sites
2.2. Field Operation and Data Collection
2.3. Photogrammetric Data Processing: Standard Workflow
2.4. Alternative Photogrammetric Processing Scenarios
2.5. RTK-GNSS Data Processing
2.6. Measurement Quality Evaluation
3. Results
3.1. The Breach at Sillon de Talbert
3.2. La Palue Field Site
4. Discussion and Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Montaño, J.; Coco, G.; Antolínez, J.A.A.; Beuzen, T.; Bryan, K.R.; Cagigal, L.; Castelle, B.; Davidson, M.A.; Goldstein, E.B.; Ibaceta, R.; et al. Blind Testing of Shoreline Evolution Models. Sci. Rep. 2020, 10, 2137. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Robinet, A.; Castelle, B.; Idier, D.; Harley, M.D.; Splinter, K.D. Controls of Local Geology and Cross-Shore/Longshore Processes on Embayed Beach Shoreline Variability. Mar. Geol. 2020, 422, 106118. [Google Scholar] [CrossRef] [Green Version]
- D’Anna, M.; Castelle, B.; Idier, D.; Rohmer, J.; Le Cozannet, G.; Thieblemont, R.; Bricheno, L. Uncertainties in Shoreline Projections to 2100 at Truc Vert Beach (France): Role of Sea-Level Rise and Equilibrium Model Assumptions. J. Geophys. Res. Earth Surf. 2021, 126, e2021JF006160. [Google Scholar] [CrossRef]
- Adebisi, N.; Balogun, A.-L.; Mahdianpari, M.; Min, T.H. Assessing the Impacts of Rising Sea Level on Coastal Morpho-Dynamics with Automated High-Frequency Shoreline Mapping Using Multi-Sensor Optical Satellites. Remote Sens. 2021, 13, 3587. [Google Scholar] [CrossRef]
- Scardino, G.; Sabatier, F.; Scicchitano, G.; Piscitelli, A.; Milella, M.; Vecchio, A.; Anzidei, M.; Mastronuzzi, G. Sea-Level Rise and Shoreline Changes Along an Open Sandy Coast: Case Study of Gulf of Taranto, Italy. Water 2020, 12, 1414. [Google Scholar] [CrossRef]
- Michel, C.; Bot, S.L.; Druine, F.; Costa, S.; Levoy, F.; Dubrulle-Brunaud, C.; Lafite, R. Stages of Sedimentary Infilling in a Hypertidal Bay Using a Combination of Sedimentological, Morphological and Dynamic Criteria (Bay of Somme, France). J. Maps 2017, 13, 858–865. [Google Scholar] [CrossRef] [Green Version]
- Franzetti, M.; Le Roy, P.; Delacourt, C.; Garlan, T.; Cancouët, R.; Sukhovich, A.; Deschamps, A. Giant Dune Morphologies and Dynamics in a Deep Continental Shelf Environment: Example of the Banc Du Four (Western Brittany, France). Mar. Geol. 2013, 346, 17–30. [Google Scholar] [CrossRef] [Green Version]
- Bertin, S.; Groom, J.; Friedrich, H. Isolating Roughness Scales of Gravel-Bed Patches. Water Resour. Res. 2017, 53, 6841–6856. [Google Scholar] [CrossRef]
- Bertin, S.; Friedrich, H. Effects of Sand Addition and Bed Flushing on Gravel Bed Surface Microtopography and Roughness. Water Resour. Res. 2019, 55, 8076–8095. [Google Scholar] [CrossRef]
- Powell, D.M.; Ockelford, A.; Rice, S.P.; Hillier, J.K.; Nguyen, T.; Reid, I.; Tate, N.J.; Ackerley, D. Structural Properties of Mobile Armors Formed at Different Flow Strengths in Gravel-Bed Rivers. J. Geophys. Res. Earth Surf. 2016, 121, 1494–1515. [Google Scholar] [CrossRef] [Green Version]
- van Rijn, L.C. Unified View of Sediment Transport by Currents and Waves. I: Initiation of Motion, Bed Roughness, and Bed-Load Transport. J. Hydraul. Eng. 2007, 133, 649–667. [Google Scholar] [CrossRef] [Green Version]
- Castelle, B.; Bonneton, P.; Sénéchal, N.; Dupuis, H.; Butel, R.; Michel, D. Dynamics of Wave-Induced Currents over an Alongshore Non-Uniform Multiple-Barred Sandy Beach on the Aquitanian Coast, France. Cont. Shelf Res. 2006, 26, 113–131. [Google Scholar] [CrossRef]
- Turki, I.; Le Bot, S.; Lecoq, N.; Shafiei, H.; Michel, C.; Deloffre, J.; Héquette, A.; Sipka, V.; Lafite, R. Morphodynamics of Intertidal Dune Field in a Mixed Wave-Tide Environment: Case of Baie de Somme in Eastern English Channel. Mar. Geol. 2021, 431, 106381. [Google Scholar] [CrossRef]
- Hoekstra, P.; Bell, P.; van Santen, P.; Roode, N.; Levoy, F.; Whitehouse, R. Bedform Migration and Bedload Transport on an Intertidal Shoal. Cont. Shelf Res. 2004, 24, 1249–1269. [Google Scholar] [CrossRef]
- van Lancker, V.; Lanckneus, J.; Hearn, S.; Hoekstra, P.; Levoy, F.; Miles, J.; Moerkerke, G.; Monfort, O.; Whitehouse, R. Coastal and Nearshore Morphology, Bedforms and Sediment Transport Pathways at Teignmouth (UK). Cont. Shelf Res. 2004, 24, 1171–1202. [Google Scholar] [CrossRef] [Green Version]
- Biausque, M.; Grottoli, E.; Jackson, D.W.T.; Cooper, J.A.G. Multiple Intertidal Bars on Beaches: A Review. Earth-Sci. Rev. 2020, 210, 103358. [Google Scholar] [CrossRef]
- Matsumoto, H.; Young, A.P.; Guza, R.T. Cusp and Mega Cusp Observations on a Mixed Sediment Beach. Earth Space Sci. 2020, 7, e2020EA001366. [Google Scholar] [CrossRef]
- Dehouck, A.; Dupuis, H.; Sénéchal, N. Pocket Beach Hydrodynamics: The Example of Four Macrotidal Beaches, Brittany, France. Mar. Geol. 2009, 266, 1–17. [Google Scholar] [CrossRef]
- Castelle, B.; Bujan, S.; Marieu, V.; Ferreira, S. 16 Years of Topographic Surveys of Rip-Channelled High-Energy Meso-Macrotidal Sandy Beach. Sci. Data 2020, 7, 410. [Google Scholar] [CrossRef]
- Harley, M.D.; Turner, I.L.; Short, A.D.; Ranasinghe, R. Assessment and Integration of Conventional, RTK-GPS and Image-Derived Beach Survey Methods for Daily to Decadal Coastal Monitoring. Coast. Eng. 2011, 58, 194–205. [Google Scholar] [CrossRef]
- Baptista, P.; Cunha, T.; Bernardes, C.; Gama, C.; Ferreira, O.; Dias, A. A Precise and Efficient Methodology to Analyse the Shoreline Displacement Rate. J. Coast. Res. 2011, 27, 223–232. [Google Scholar] [CrossRef]
- Baptista, P.; Bastos, L.; Bernardes, C.; Cunha, T.; Dias, J. Monitoring Sandy Shores Morphologies by DGPS— A Practical Tool to Generate Digital Elevation Models. J. Coast. Res. 2008, 24, 1516–1528. [Google Scholar] [CrossRef]
- Jaud, M.; Delacourt, C.; Le Dantec, N.; Allemand, P.; Ammann, J.; Grandjean, P.; Nouaille, H.; Prunier, C.; Cuq, V.; Augereau, E.; et al. Diachronic UAV Photogrammetry of a Sandy Beach in Brittany (France) for a Long-Term Coastal Observatory. IJGI 2019, 8, 267. [Google Scholar] [CrossRef] [Green Version]
- Talavera, L.; Del Río, L.; Benavente, J.; Barbero, L.; López-Ramírez, J.A. UAS as Tools for Rapid Detection of Storm-Induced Morphodynamic Changes at Camposoto Beach, SW Spain. Int. J. Remote Sens. 2018, 39, 5550–5567. [Google Scholar] [CrossRef]
- Turner, I.L.; Harley, M.D.; Drummond, C.D. UAVs for Coastal Surveying. Coast. Eng. 2016, 114, 19–24. [Google Scholar] [CrossRef]
- Lowe, D.G. Distinctive Image Features from Scale-Invariant Keypoints. Int. J. Comput. Vis. 2004, 60, 91–110. [Google Scholar] [CrossRef]
- James, M.R.; Chandler, J.H.; Eltner, A.; Fraser, C.; Miller, P.E.; Mills, J.P.; Noble, T.; Robson, S.; Lane, S.N. Guidelines on the Use of Structure-from-Motion Photogrammetry in Geomorphic Research. Earth Surf. Process. Landf. 2019, 44, 2081–2084. [Google Scholar] [CrossRef]
- Eltner, A.; Kaiser, A.; Castillo, C.; Rock, G.; Neugirg, F.; Abellán, A. Image-Based Surface Reconstruction in Geomorphometry: Merits, Limits and Developments. Earth Surf. Dyn. 2016, 4, 359–389. [Google Scholar] [CrossRef] [Green Version]
- Heays, K.G.; Friedrich, H.; Melville, B.W. Laboratory Study of Gravel-Bed Cluster Formation and Disintegration. Water Resour. Res. 2014, 50, 2227–2241. [Google Scholar] [CrossRef]
- Bertin, S.; Friedrich, H. Field Application of Close-Range Digital Photogrammetry (CRDP) for Grain-Scale Fluvial Morphology Studies: Fluvial Grain-Scale Morphology and Field Application of Photogrammetry. Earth Surf. Process. Landf. 2016, 41, 1358–1369. [Google Scholar] [CrossRef]
- Brunier, G.; Fleury, J.; Anthony, E.J.; Gardel, A.; Dussouillez, P. Close-Range Airborne Structure-from-Motion Photogrammetry for High-Resolution Beach Morphometric Surveys: Examples from an Embayed Rotating Beach. Geomorphology 2016, 261, 76–88. [Google Scholar] [CrossRef]
- Casella, E.; Rovere, A.; Pedroncini, A.; Mucerino, L.; Casella, M.; Cusati, L.A.; Vacchi, M.; Ferrari, M.; Firpo, M. Study of Wave Runup Using Numerical Models and Low-Altitude Aerial Photogrammetry: A Tool for Coastal Management. Estuar. Coast. Shelf Sci. 2014, 149, 160–167. [Google Scholar] [CrossRef]
- Casella, E.; Rovere, A.; Pedroncini, A.; Stark, C.P.; Casella, M.; Ferrari, M.; Firpo, M. Drones as Tools for Monitoring Beach Topography Changes in the Ligurian Sea (NW Mediterranean). Geo-Mar. Lett. 2016, 36, 151–163. [Google Scholar] [CrossRef]
- Groom, J.; Bertin, S.; Friedrich, H. Assessing Intra-Bar Variations in Grain Roughness Using Close-Range Photogrammetry. J. Sediment. Res. 2018, 88, 555–567. [Google Scholar] [CrossRef]
- Li, W.; Bertin, S.; Friedrich, H. Combining Structure from Motion and Close-Range Stereo Photogrammetry to Obtain Scaled Gravel Bar DEMs. Int. J. Remote Sens. 2018, 39, 9269–9293. [Google Scholar] [CrossRef]
- Bertin, S.; Friedrich, H.; Delmas, P.; Chan, E.; Gimel’farb, G. Digital Stereo Photogrammetry for Grain-Scale Monitoring of Fluvial Surfaces: Error Evaluation and Workflow Optimisation. ISPRS J. Photogramm. Remote Sens. 2015, 101, 193–208. [Google Scholar] [CrossRef]
- Laporte-Fauret, Q.; Marieu, V.; Castelle, B.; Michalet, R.; Bujan, S.; Rosebery, D. Low-Cost UAV for High-Resolution and Large-Scale Coastal Dune Change Monitoring Using Photogrammetry. J. Mar. Sci. Eng. 2019, 7, 63. [Google Scholar] [CrossRef] [Green Version]
- Seymour, A.C.; Ridge, J.T.; Rodriguez, A.B.; Newton, E.; Dale, J.; Johnston, D.W. Deploying Fixed Wing Unoccupied Aerial Systems (UAS) for Coastal Morphology Assessment and Management. J. Coast. Res. 2018, 34, 704–717. [Google Scholar] [CrossRef] [Green Version]
- Gonçalves, J.A.; Henriques, R. UAV Photogrammetry for Topographic Monitoring of Coastal Areas. ISPRS J. Photogramm. Remote Sens. 2015, 104, 101–111. [Google Scholar] [CrossRef]
- Guisado-Pintado, E.; Jackson, D.W.T.; Rogers, D. 3D Mapping Efficacy of a Drone and Terrestrial Laser Scanner over a Temperate Beach-Dune Zone. Geomorphology 2019, 328, 157–172. [Google Scholar] [CrossRef]
- Nahon, A.; Molina, P.; Blázquez, M.; Simeon, J.; Capo, S.; Ferrero, C. Corridor Mapping of Sandy Coastal Foredunes with UAS Photogrammetry and Mobile Laser Scanning. Remote Sens. 2019, 11, 1352. [Google Scholar] [CrossRef] [Green Version]
- Madurapperuma, B.; Lamping, J.; McDermott, M.; Murphy, B.; McFarland, J.; Deyoung, K.; Smith, C.; MacAdam, S.; Monroe, S.; Corro, L.; et al. Factors Influencing Movement of the Manila Dunes and Its Impact on Establishing Non-Native Species. Remote Sens. 2020, 12, 1536. [Google Scholar] [CrossRef]
- James, M.R.; Robson, S.; d’Oleire-Oltmanns, S.; Niethammer, U. Optimising UAV Topographic Surveys Processed with Structure-from-Motion: Ground Control Quality, Quantity and Bundle Adjustment. Geomorphology 2017, 280, 51–66. [Google Scholar] [CrossRef] [Green Version]
- Oniga, V.-E.; Breaban, A.-I.; Pfeifer, N.; Chirila, C. Determining the Suitable Number of Ground Control Points for UAS Images Georeferencing by Varying Number and Spatial Distribution. Remote Sens. 2020, 12, 876. [Google Scholar] [CrossRef] [Green Version]
- Brunier, G.; Michaud, E.; Fleury, J.; Anthony, E.J.; Morvan, S.; Gardel, A. Assessing the Relationship between Macro-Faunal Burrowing Activity and Mudflat Geomorphology from UAV-Based Structure-from-Motion Photogrammetry. Remote Sens. Environ. 2020, 241, 111717. [Google Scholar] [CrossRef]
- Sanz-Ablanedo, E.; Chandler, J.H.; Rodríguez-Pérez, J.R.; Ordóñez, C. Accuracy of Unmanned Aerial Vehicle (UAV) and SfM Photogrammetry Survey as a Function of the Number and Location of Ground Control Points Used. Remote Sens. 2018, 10, 1606. [Google Scholar] [CrossRef] [Green Version]
- James, M.R.; Robson, S.; Smith, M.W. 3-D Uncertainty-Based Topographic Change Detection with Structure-from-Motion Photogrammetry: Precision Maps for Ground Control and Directly Georeferenced Surveys. Earth Surf. Process. Landf. 2017, 42, 1769–1788. [Google Scholar] [CrossRef]
- Cledat, E.; Jospin, L.V.; Cucci, D.A.; Skaloud, J. Mapping Quality Prediction for RTK/PPK-Equipped Micro-Drones Operating in Complex Natural Environment. ISPRS J. Photogramm. Remote Sens. 2020, 167, 24–38. [Google Scholar] [CrossRef]
- Bertin, S.; Levy, B.; Gee, T.; Delmas, P. Geomorphic Change Detection Using Cost-Effective Structure-from-Motion Photogrammetry: Evaluation of Direct Georeferencing from Consumer-Grade UAS at Orewa Beach (New Zealand). Photogramm. Eng. Remote Sens. 2020, 86, 289–298. [Google Scholar] [CrossRef]
- Carbonneau, P.E.; Dietrich, J.T. Cost-Effective Non-Metric Photogrammetry from Consumer-Grade SUAS: Implications for Direct Georeferencing of Structure from Motion Photogrammetry. Earth Surf. Process. Landf. 2017, 42, 473–486. [Google Scholar] [CrossRef] [Green Version]
- Turner, D.; Lucieer, A.; Wallace, L. Direct Georeferencing of Ultrahigh-Resolution UAV Imagery. IEEE Trans. Geosci. Remote Sens. 2014, 52, 2738–2745. [Google Scholar] [CrossRef]
- Taddia, Y.; González-García, L.; Zambello, E.; Pellegrinelli, A. Quality Assessment of Photogrammetric Models for Façade and Building Reconstruction Using DJI Phantom 4 RTK. Remote Sens. 2020, 12, 3144. [Google Scholar] [CrossRef]
- Forlani, G.; Dall’Asta, E.; Diotri, F.; di Cella, U.M.; Roncella, R.; Santise, M. Quality Assessment of DSMs Produced from UAV Flights Georeferenced with On-Board RTK Positioning. Remote Sens. 2018, 10, 311. [Google Scholar] [CrossRef] [Green Version]
- Taddia, Y.; Stecchi, F.; Pellegrinelli, A. Using DJI Phantom 4 RTK Drone for Topographic Mapping of Coastal Areas. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2019, XLII-2/W13, 625–630. [Google Scholar] [CrossRef] [Green Version]
- Taddia, Y.; Stecchi, F.; Pellegrinelli, A. Coastal Mapping Using DJI Phantom 4 RTK in Post-Processing Kinematic Mode. Drones 2020, 4, 9. [Google Scholar] [CrossRef] [Green Version]
- Benassi, F.; Dall’Asta, E.; Diotri, F.; Forlani, G.; Morra di Cella, U.; Roncella, R.; Santise, M. Testing Accuracy and Repeatability of UAV Blocks Oriented with GNSS-Supported Aerial Triangulation. Remote Sens. 2017, 9, 172. [Google Scholar] [CrossRef] [Green Version]
- Shom. Références Altimétriques Maritimes (RAM). 2019. Available online: https://data.europa.eu/data/datasets/5925720b88ee385b69385a47?locale=fr (accessed on 6 March 2022).
- Quilfen, V. Dynamique de Plages Sableuses Enclavées à la Pointe Bretagne. PhD Thesis, Université Paris-Est, Paris, France, 2016. [Google Scholar]
- Masselink, G.; Short, A. The Effect of Tide Range on Beach Morphodynamics and Morphology: A Conceptual Beach Model. J. Coast. Res. 1993, 9, 785–800. [Google Scholar]
- Stéphan, P. Quelques données nouvelles sur la mobilité récente (1930-2008) et le bilan sédimentaire des flèches de galets de Bretagne. Géomorphologie Relief Process. Environ. 2011, 17, 205–232. [Google Scholar] [CrossRef]
- Carter, R.W.G.; Orford, J.D. Coarse Clastic Barrier Beaches: A Discussion of the Distinctive Dynamic and Morphosedimentary Characteristics. Mar. Geol. 1984, 60, 377–389. [Google Scholar] [CrossRef]
- Jennings, R.; Shulmeister, J. A Field Based Classification Scheme for Gravel Beaches. Mar. Geol. 2002, 186, 211–228. [Google Scholar] [CrossRef]
- Stéphan, P.; Suanez, S.; Fichaut, B. Long-Term Morphodynamic Evolution of the Sillon de Talbert Gravel Barrier Spit, Brittany, France. Shore Beach 2012, 80, 19–36. [Google Scholar]
- Stéphan, P.; Suanez, S.; Fichaut, B.; Autret, R.; Blaise, E.; Houron, J.; Ammann, J.; Grandjean, P. Monitoring the Medium-Term Retreat of a Gravel Spit Barrier and Management Strategies, Sillon de Talbert (North Brittany, France). Ocean. Coast. Manag. 2018, 158, 64–82. [Google Scholar] [CrossRef]
- Suanez, S.; Stéphan, P.; Floc’h, F.; Autret, R.; Fichaut, B.; Blaise, E.; Houron, J.; Ammann, J.; Grandjean, P.; Accensi, M.; et al. Fifteen Years of Hydrodynamic Forcing and Morphological Changes Leading to Breaching of a Gravel Spit, Sillon de Talbert (Brittany). Géomorphologie Relief Process. Environ. 2018, 24, 403–428. [Google Scholar] [CrossRef]
- Cooper, M.A.R.; Cross, P.A. Statistical Concepts and Their Application in Photogrammetry and Surveying. Photogramm. Rec. 1988, 12, 637–663. [Google Scholar] [CrossRef]
- Javernick, L.; Brasington, J.; Caruso, B. Modeling the Topography of Shallow Braided Rivers Using Structure-from-Motion Photogrammetry. Geomorphology 2014, 213, 166–182. [Google Scholar] [CrossRef]
- James, M.R.; Antoniazza, G.; Robson, S.; Lane, S.N. Mitigating Systematic Error in Topographic Models for Geomorphic Change Detection: Accuracy, Precision and Considerations beyond Off-nadir Imagery. Earth Surf. Process. Landf. 2020, 45, 2251–2271. [Google Scholar] [CrossRef]
- Štroner, M.; Urban, R.; Reindl, T.; Seidl, J.; Brouček, J. Evaluation of the Georeferencing Accuracy of a Photogrammetric Model Using a Quadrocopter with Onboard GNSS RTK. Sensors 2020, 20, 2318. [Google Scholar] [CrossRef] [Green Version]
- Grayson, B.; Penna, N.T.; Mills, J.P.; Grant, D.S. GPS Precise Point Positioning for UAV Photogrammetry. Photogramm. Rec. 2018, 33, 427–447. [Google Scholar] [CrossRef] [Green Version]
- Cooper, H.; Wasklewicz, T.; Zhu, Z.; LeCompte, K.; Heffentrager, M.; Smaby, R.; Brady, J.; Howard, R. Evaluating the Ability of Multi-Sensor Techniques to Capture Topographic Complexity. Sensors 2021, 21, 2105. [Google Scholar] [CrossRef]
- Dandois, J.P.; Olano, M.; Ellis, E.C. Optimal Altitude, Overlap, and Weather Conditions for Computer Vision UAV Estimates of Forest Structure. Remote Sens. 2015, 7, 13895–13920. [Google Scholar] [CrossRef] [Green Version]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Field Site Date | Tidal Coefficient (-) | Flight Count/Image Count (-) | Flying Height (m) | Overlap Along/Cross (%) | Survey Area (m2) | GSD (m/Pixel) | Target Count (Fixed Targets) (-) |
|---|---|---|---|---|---|---|---|
| Sillon de Talbert 17 November 2020 | 103 | 2/734 | 58 | 80/70 | 125,000 | 0.014 | 21 (0) |
| La Palue 17 September 2020 | 101 | 5/1407 | 106 | 80/70 | 1,320,000 | 0.026 | 30 (5) |
| La Palue 17 December 2020 | 90 | 6/1548 | 105 | 80/70 | 1,280,000 | 0.026 | 22 (3) |
| La Palue 2 March 2021 | 103 | 5/1411 | 108 | 80/70 | 872,000 | 0.025 | 19 (1) |
| La Palue 29 April 2021 | 106 | 5/1386 | 107 | 80/70 | 1,080,000 | 0.026 | 28 (6) |
| Processing Step/Scenario | Image Alignment | Sparse Point Cloud Filtering | Model Optimization | Dense Matching and DEM |
|---|---|---|---|---|
| Standard (High1) |
|
|
|
|
| Low | Accuracy: “low” | - | - | DEM resolution: 1 m |
| Medium | Accuracy: “medium” | - | - | DEM resolution: 1 m |
| High2 | Pair preselection: “reference” | - | - | DEM resolution: 1 m |
| Highest | Accuracy: “highest” | - | - | DEM resolution: 1 m |
| S-GCP | - | - |
| DEM resolution: 1 m |
| S-RTK | - | - | 0 GCPs/N ChkPts | DEM resolution: 1 m |
| S-RTK-GCP | - | - | N GCPs/0 ChkPts | DEM resolution: 1 m |
| S-RTK-1GCP | - | - | 1 GCPs/N−1 ChkPts | DEM resolution: 1 m |
| S-RTK-3GCP | - | - | 3 GCPs/N−3 ChkPts | DEM resolution: 1 m |
| S-RTK-5GCP | - | - | 5 GCPs/N−5 ChkPts | DEM resolution: 1 m |
| S-RTK-9GCP | - | - | 9 GCPs/N−9 ChkPts | DEM resolution: 1 m |
| Error Metric | Formula | |
|---|---|---|
| Mean Error (ME) | (1) | |
| Standard Deviation of Error (SDE) | (2) | |
| Root-Mean Square Error (RMSE) | (3) | |
| (4) | ||
| ) | (5) | |
| Mean Unsigned Error (MUE) | (6) | |
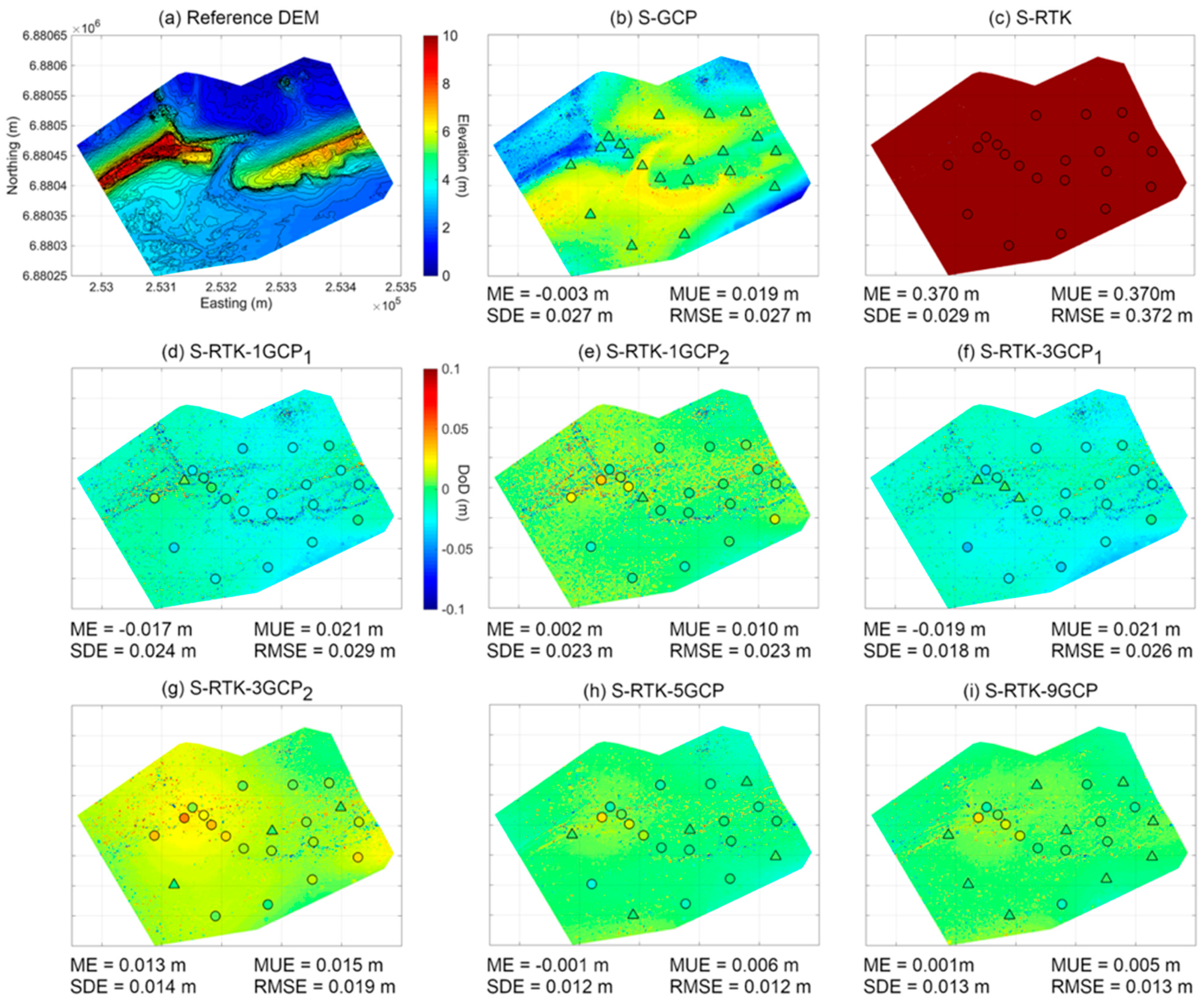
| (a) Reference DEM: S-RTK-GCP | (b) S-GCP | (c) S-RTK |
| ME = N.A. (0.000 m) | ME = N.A. (0.000 m) | ME = 0.363 m (N.A.) |
| SDE = N.A. (0.002 m) | SDE = N.A. (0.007 m) | SDE = 0.014 (N.A.) |
| (d) S-RTK-1GCP1 | (e) S-RTK-1GCP2 | (f) S-RTK-3GCP1 |
| ME = −0.019 m (0.003 m) | ME = 0.002 m (0.002 m) | ME = −0.022 m (0.001 m) |
| SDE = 0.011 (0.000 m) | SDE = 0.012 (0.000 m) | SDE = 0.010 (0.001 m) |
| (g) S-RTK-3GCP2 | (h) S-RTK-5GCP | (i) S-RTK-9GCP |
| ME = 0.016 m (0.001 m) | ME = −0.001 m (0.000 m) | ME = 0.003 m (0.000 m) |
| SDE = 0.014 (0.001 m) | SDE = 0.013 (0.002 m) | SDE = 0.012 (0.002 m) |
| (a) Reference DEM: S-RTK-GCP | (b) S-GCP | (c) S-RTK |
| MEX = N.A. (−0.001 m) | MEX = N.A. (0.000 m) | MEX = −0.022 m (N.A.) |
| SDEX = N.A. (0.027 m) | SDEX = N.A. (0.026 m) | SDEX = 0.037 m (N.A.) |
| MEY = N.A. (0.001 m) | MEY = N.A. (0.000 m) | MEY = 0.039 m (N.A.) |
| SDEY = N.A. (0.029 m) | SDEY = N.A. (0.027 m) | SDEY = 0.053 m (N.A.) |
| (d) S-RTK-1GCP1 | (e) S-RTK-1GCP2 | (f) S-RTK-3GCP1 |
| MEX = -0.025 m (0.025 m) | MEX = −0.019 m (−0.029 m) | MEX = −0.021 m (−0.013 m) |
| SDEX = 0.035 m (0.000 m) | SDEX = 0.038 m (0.000 m) | SDEX = 0.037 m (0.036 m) |
| MEY = 0.036 m (0.019 m) | MEY = 0.037 m (−0.014 m) | MEY = 0.044 m (−0.007 m) |
| SDEY = 0.053 m (0.000 m) | SDEY = 0.049 m (0.000 m) | SDEY = 0.048 m (0.028 m) |
| (g) S-RTK-3GCP2 | (h) S-RTK-5GCP | (i) S-RTK-9GCP |
| MEX = −0.019 m (0.003 m) | MEX = −0.009 m (0.003 m) | MEX = 0.003 m (−0.003 m) |
| SDEX = 0.037 m (0.022 m) | SDEX = 0.039 m (0.018 m) | SDEX = 0.042 m (0.021 m) |
| MEY = 0.026 m (0.005 m) | MEY = 0.004 m (0.009 m) | MEY = −0.009 m (0.004 m) |
| SDEY = 0.047 m (0.010 m) | SDEY = 0.047 m (0.016 m) | SDEY = 0.050 m (0.014 m) |
| (a) Low | (b) Medium | (c) High1 | (d) High2 | (e) Highest | |
| Alignment time | 27 min | 43 min | 105 min | 2721 min | 105 min |
| Initial tie points | 567,716 | 1,918,509 | 2,102,195 | 1,967,440 | 2,482,173 |
| Final tie points | 79,909 | 412,200 | 435,657 | 402,828 | 320,413 |
| Error statistics | ME = 0.000 m | ME = −0.001 m | ME = 0.000 m | ME = −0.002 m | ME = −0.004 m |
| MUE = 0.096 m | MUE = 0.038 m | MUE = 0.031 m | MUE = 0.033 m | MUE = 0.045 m | |
| SDE = 0.125 m | SDE = 0.049 m | SDE = 0.042 m | SDE = 0.044 m | SDE = 0.062 m | |
| RMSE = 0.125 m | RMSE = 0.049 m | RMSE = 0.042 m | RMSE = 0.044 m | RMSE = 0.062 m | |
| Max = 0.368 m | Max = 0.145 m | Max = 0.117 m | Max = 0.144 m | Max = 0.213 m |
| (a) Reference DEM | (b) Mild | (c) Moderate | (d) Aggressive |
| ME = 0.001 m | ME = 0.000 m | ME = −0.001 m | ME = −0.001 m |
| MUE = 0.027 m | MUE = 0.003 m | MUE = 0.005 m | MUE = 0.005 m |
| SDE = 0.033 m | SDE = 0.072 m | SDE = 0.084 m | SDE = 0.084 m |
| RMSE = 0.033 m | RMSE = 0.072 m | RMSE = 0.084 m | RMSE = 0.084 m |
| Maximum = 0.186 m | Maximum = 76.23 m | Maximum = 77.33 m | Maximum = 77.33 m |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bertin, S.; Stéphan, P.; Ammann, J. Assessment of RTK Quadcopter and Structure-from-Motion Photogrammetry for Fine-Scale Monitoring of Coastal Topographic Complexity. Remote Sens. 2022, 14, 1679. https://doi.org/10.3390/rs14071679
Bertin S, Stéphan P, Ammann J. Assessment of RTK Quadcopter and Structure-from-Motion Photogrammetry for Fine-Scale Monitoring of Coastal Topographic Complexity. Remote Sensing. 2022; 14(7):1679. https://doi.org/10.3390/rs14071679
Chicago/Turabian StyleBertin, Stéphane, Pierre Stéphan, and Jérôme Ammann. 2022. "Assessment of RTK Quadcopter and Structure-from-Motion Photogrammetry for Fine-Scale Monitoring of Coastal Topographic Complexity" Remote Sensing 14, no. 7: 1679. https://doi.org/10.3390/rs14071679
APA StyleBertin, S., Stéphan, P., & Ammann, J. (2022). Assessment of RTK Quadcopter and Structure-from-Motion Photogrammetry for Fine-Scale Monitoring of Coastal Topographic Complexity. Remote Sensing, 14(7), 1679. https://doi.org/10.3390/rs14071679