
A Cloud Detection Method Based on Spectral and Gradient Features for SDGSAT-1 Multispectral Images



Abstract
:
1. Introduction
2. Materials and Methods
2.1. SDGSAT-1
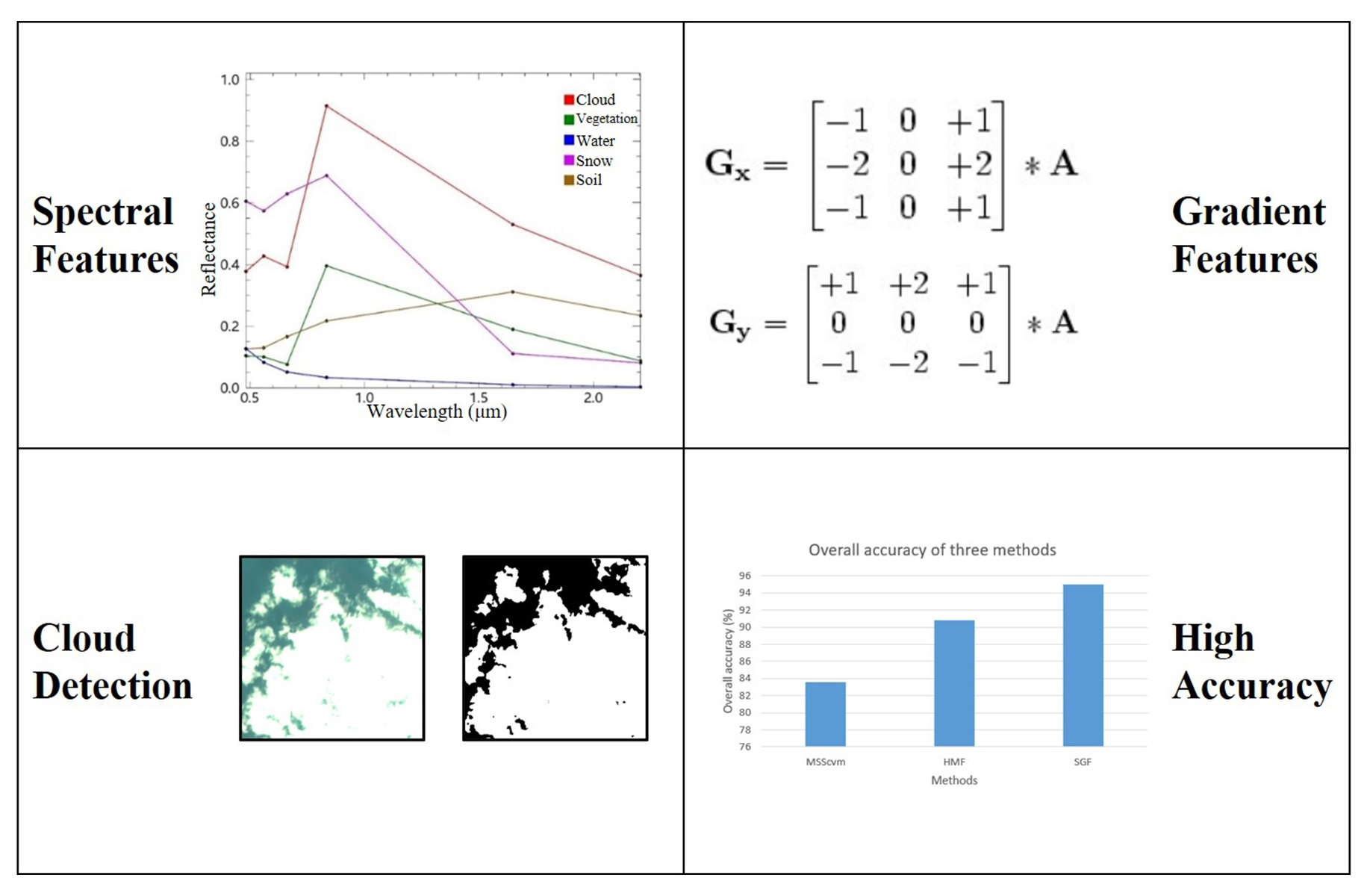
2.2. Spectral Features
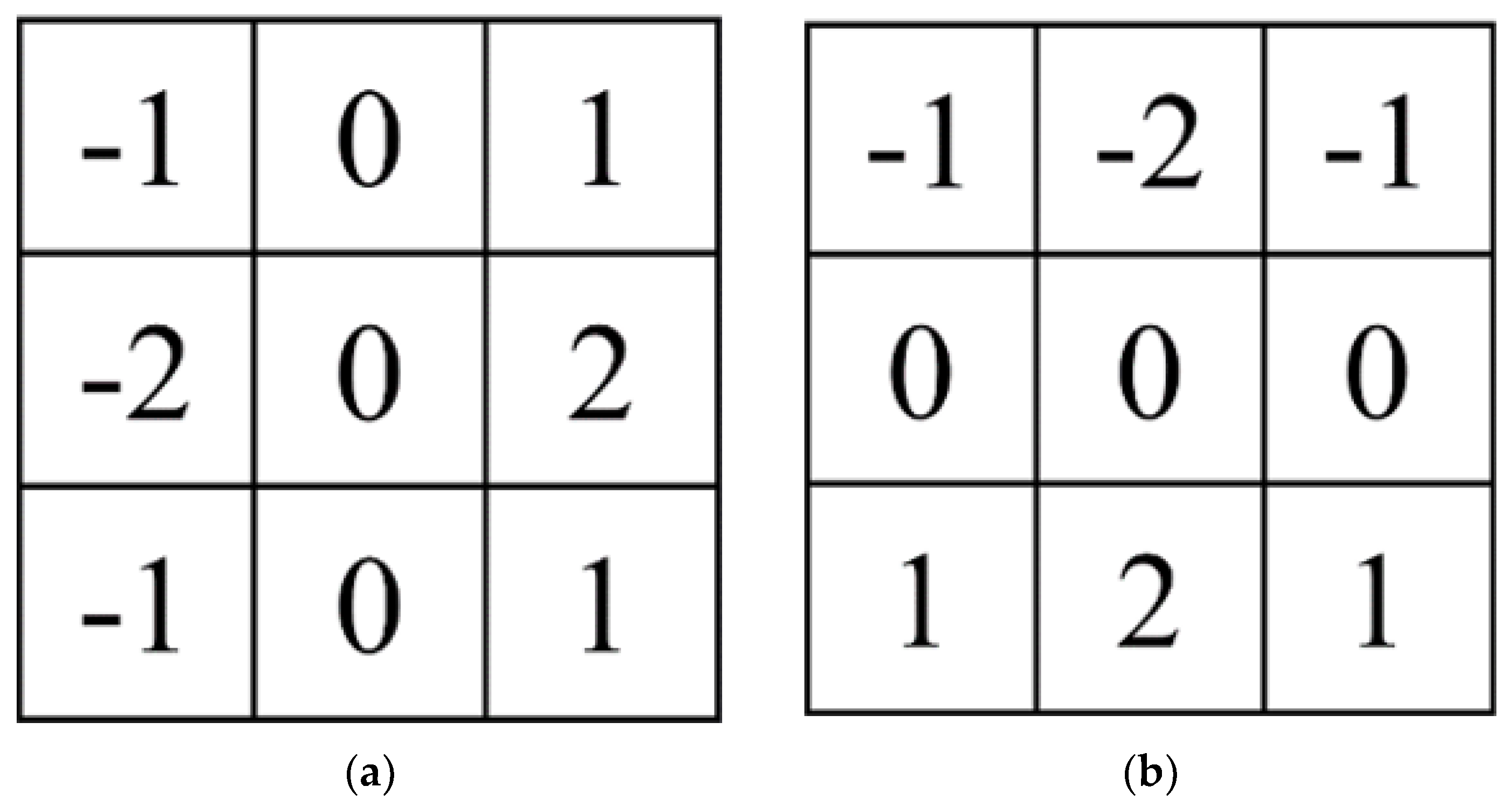
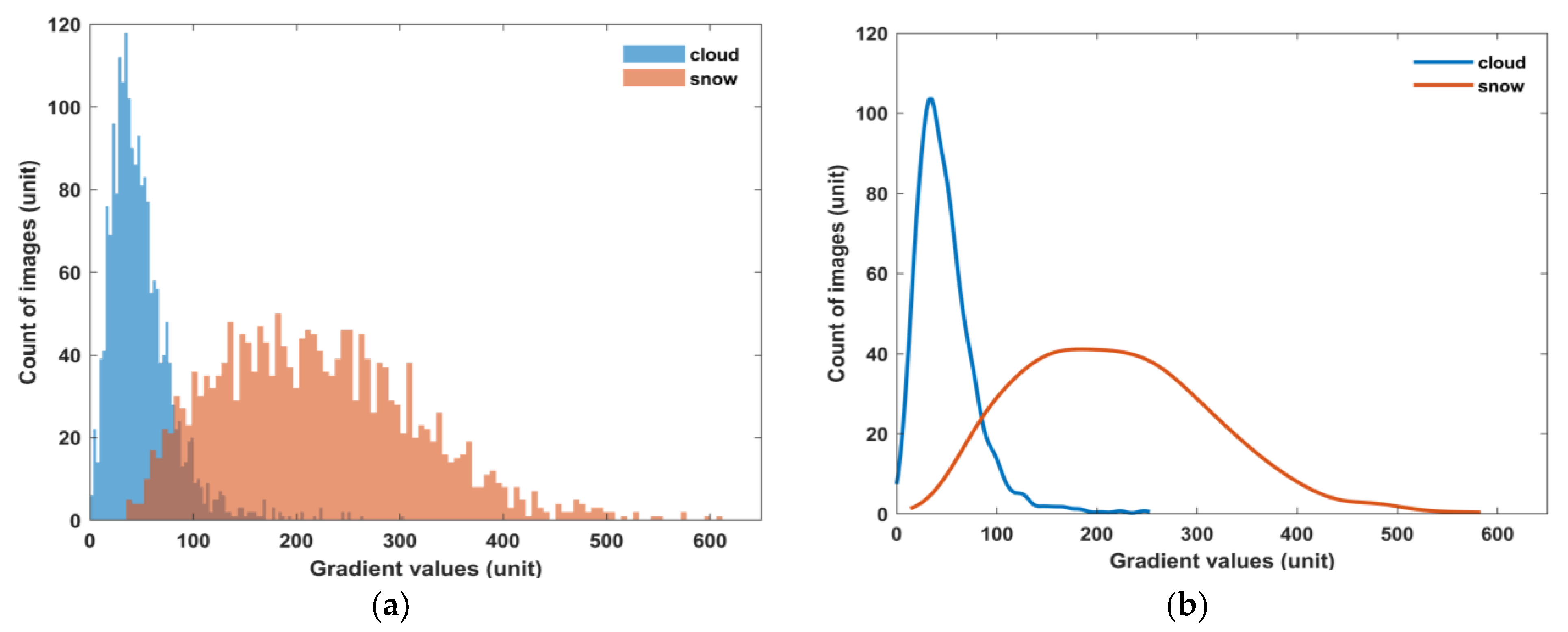
2.3. Gradient Features
3. Results
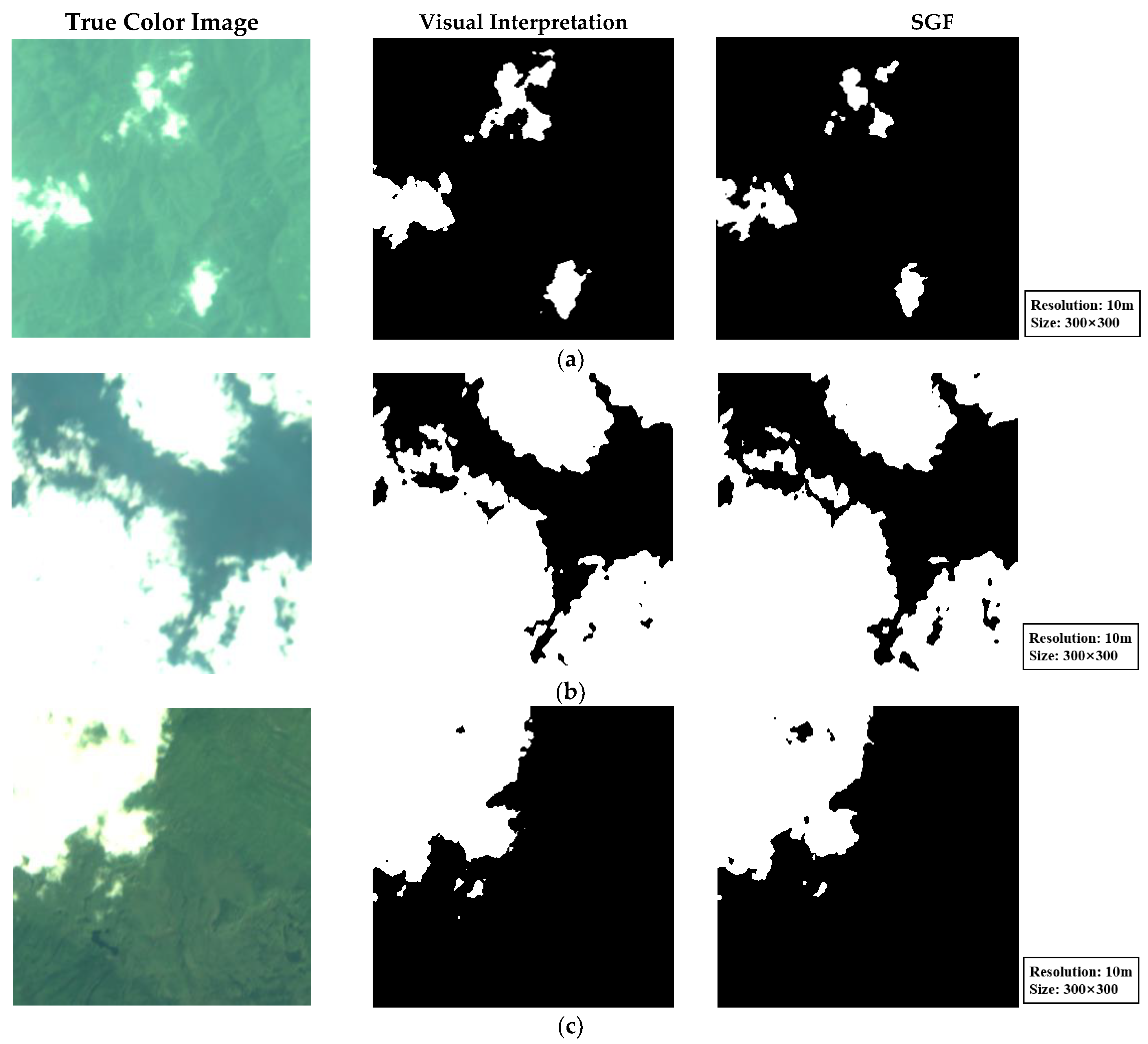
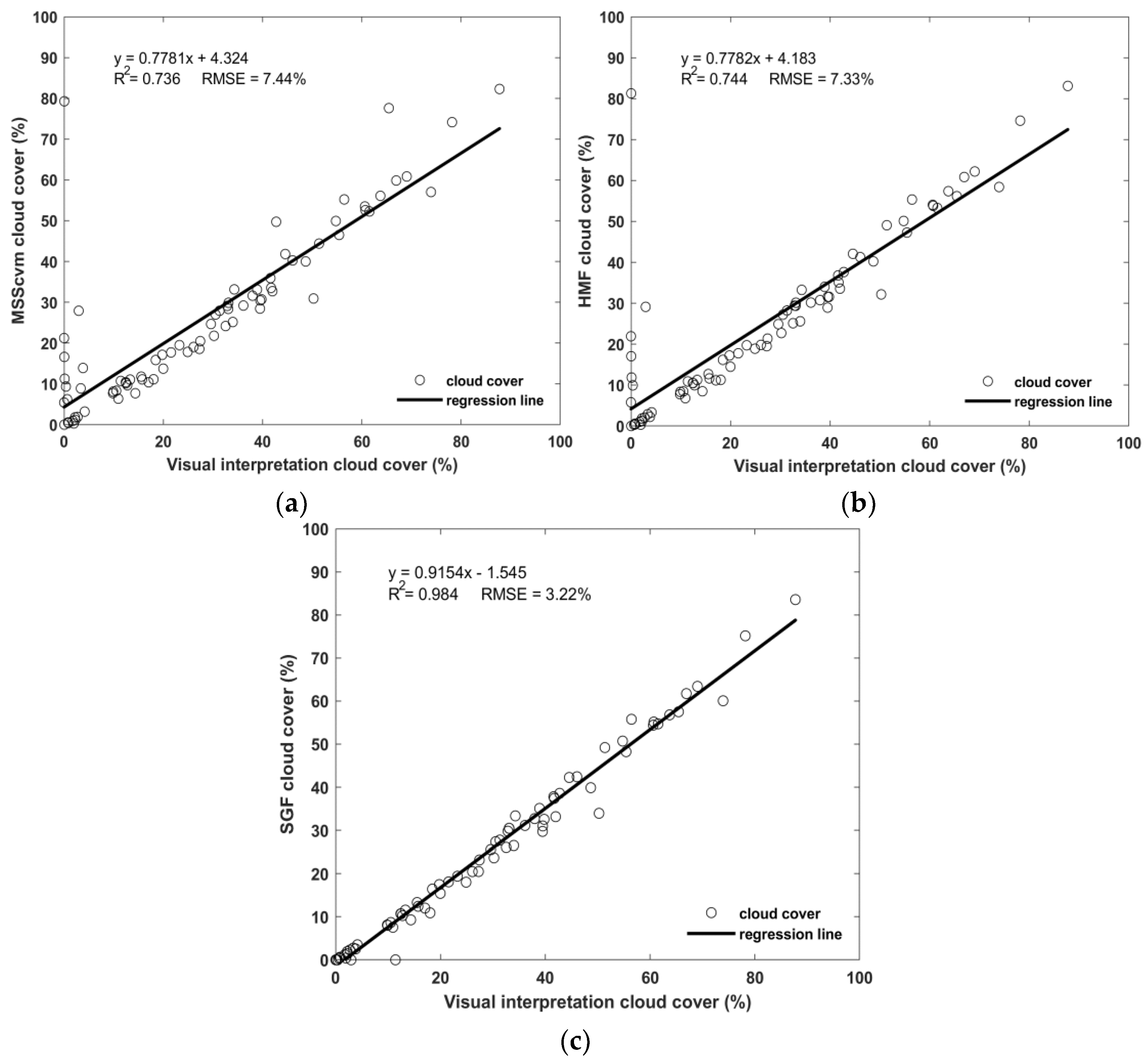
3.1. Comparison Experiments with Other Methods
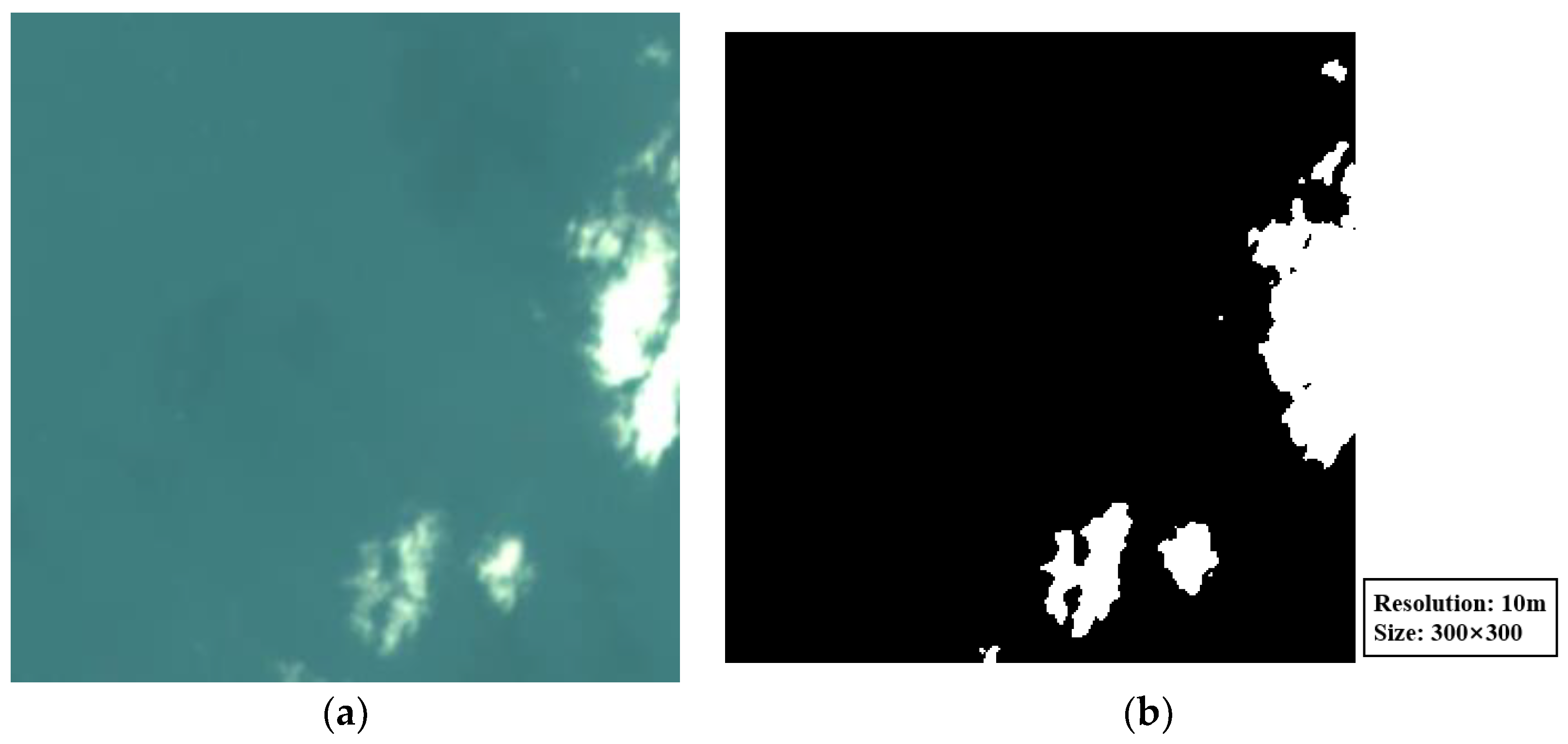
3.2. Visual Interpretation
3.3. Accuracy Evaluation
4. Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| SDGSAT-1 | Sustainable Development Science Satellite-1 |
| MII | Multi-spectral imager |
| SWIR | Short-wave infrared |
| SGF | Spectral and gradient features |
| NDWI | Normalized difference water index |
| NDVI | Normalized difference vegetation index |
| HOT | Haze-optimized transformation |
| ACCA | Automatic cloud cover assessment |
| TIR | Thermal infrared |
| NIR | Near infrared |
| Fmask | Function of mask |
| LLL | Low-light-level imager |
| TIS | Thermal infrared spectrometer |
| NDSI | Normalized difference snow index |
| TOA | Top of atmosphere |
| QA | Quality assurance |
| MSScvm | Multispectral scanner clear-view mask |
| HMF | Hybrid multispectral features |
References
- Nguyen, T.T.; Hoang, T.D.; Pham, M.T.; Vu, T.T.; Nguyen, T.H.; Huynh, Q.-T.; Jo, J. Monitoring Agriculture Areas with Satellite Images and Deep Learning. Appl. Soft Comput. 2020, 95, 106565. [Google Scholar] [CrossRef]
- Weiss, M.; Jacob, F.; Duveiller, G. Remote Sensing for Agricultural Applications: A Meta-Review. Remote Sens. Environ. 2020, 236, 111402. [Google Scholar] [CrossRef]
- Karthikeyan, L.; Chawla, I.; Mishra, A.K. A Review of Remote Sensing Applications in Agriculture for Food Security: Crop Growth and Yield, Irrigation, and Crop Losses. J. Hydrol. 2020, 586, 124905. [Google Scholar] [CrossRef]
- Lv, Z.; Liu, T.; Benediktsson, J.A.; Falco, N. Land Cover Change Detection Techniques: Very-High-Resolution Optical Images: A Review. IEEE Geosci. Remote Sens. Mag. 2022, 10, 44–63. [Google Scholar] [CrossRef]
- Luo, H.; Liu, C.; Wu, C.; Guo, X. Urban Change Detection Based on Dempster–Shafer Theory for Multitemporal Very High-Resolution Imagery. Remote Sens. 2018, 10, 980. [Google Scholar] [CrossRef] [Green Version]
- Zellweger, F.; De Frenne, P.; Lenoir, J.; Rocchini, D.; Coomes, D. Advances in Microclimate Ecology Arising from Remote Sensing. Trends Ecol. Evol. 2019, 34, 327–341. [Google Scholar] [CrossRef] [Green Version]
- Jiang, L.; Huang, X.; Wang, F.; Liu, Y.; An, P. Method for Evaluating Ecological Vulnerability under Climate Change Based on Remote Sensing: A Case Study. Ecol. Indic. 2018, 85, 479–486. [Google Scholar] [CrossRef]
- Lu, X.; Zeng, X.; Xu, Z.; Guan, H. Improving the Accuracy of near Real-Time Seismic Loss Estimation Using Post-Earthquake Remote Sensing Images. Earthq. Spectra 2018, 34, 1219–1245. [Google Scholar] [CrossRef]
- Ma, H.; Liu, Y.; Ren, Y.; Yu, J. Detection of Collapsed Buildings in Post-Earthquake Remote Sensing Images Based on the Improved Yolov3. Remote Sens. 2019, 12, 44. [Google Scholar] [CrossRef] [Green Version]
- Abdollahi, M.; Islam, T.; Gupta, A.; Hassan, Q. An Advanced Forest Fire Danger Forecasting System: Integration of Remote Sensing and Historical Sources of Ignition Data. Remote Sens. 2018, 10, 923. [Google Scholar] [CrossRef]
- Barmpoutis, P.; Papaioannou, P.; Dimitropoulos, K.; Grammalidis, N. A Review on Early Forest Fire Detection Systems Using Optical Remote Sensing. Sensors 2020, 20, 6442. [Google Scholar] [CrossRef] [PubMed]
- Meng, X.; Shen, H.; Yuan, Q.; Li, H.; Zhang, L.; Sun, W. Pansharpening for Cloud-Contaminated Very High-Resolution Remote Sensing Images. IEEE Trans. Geosci. Remote Sens. 2019, 57, 2840–2854. [Google Scholar] [CrossRef]
- Shen, H.; Wu, J.; Cheng, Q.; Aihemaiti, M.; Zhang, C.; Li, Z. A Spatiotemporal Fusion Based Cloud Removal Method for Remote Sensing Images with Land Cover Changes. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2019, 12, 862–874. [Google Scholar] [CrossRef]
- Birk, R.; Camus, W.; Valenti, E.; McCandless, W. Synthetic Aperture Radar Imaging Systems. IEEE Aerosp. Electron. Syst. Mag. 1995, 10, 15–23. [Google Scholar] [CrossRef]
- Guo, H. Big Earth Data: A New Frontier in Earth and Information Sciences. Big Earth Data 2017, 1, 4–20. [Google Scholar] [CrossRef] [Green Version]
- Jiang, M.; Li, J.; Shen, H. A Deep Learning-Based Heterogeneous Spatio-Temporal-Spectral Fusion: Sar and Optical Images. In Proceedings of the 2021 IEEE International Geoscience and Remote Sensing Symposium IGARSS, Brussels, Belgium, 11–16 July 2021. [Google Scholar]
- Li, X.; Feng, R.; Guan, X.; Shen, H.; Zhang, L. Remote Sensing Image Mosaicking: Achievements and Challenges. IEEE Geosci. Remote Sens. Mag. 2019, 7, 8–22. [Google Scholar] [CrossRef]
- Luo, Y.; Guan, K.; Peng, J. Stair: A Generic and Fully-Automated Method to Fuse Multiple Sources of Optical Satellite Data to Generate a High-Resolution, Daily and Cloud-/Gap-Free Surface Reflectance Product. Remote Sens. Environ. 2018, 214, 87–99. [Google Scholar] [CrossRef]
- Shen, S.S.; Irish, R.R.; Descour, M.R. Landsat 7 Automatic Cloud Cover Assessment. In Proceedings of the SPIE-The International Society for Optical Engineering AeroSense 2000, Orlando, FL, USA, 24–28 April 2000. [Google Scholar]
- Luo, Y.; Trishchenko, A.; Khlopenkov, K. Developing Clear-Sky, Cloud and Cloud Shadow Mask for Producing Clear-Sky Composites at 250-Meter Spatial Resolution for the Seven Modis Land Bands over Canada and North America. Remote Sens. Environ. 2008, 112, 4167–4185. [Google Scholar] [CrossRef]
- Zhu, Z.; Woodcock, C.E. Object-Based Cloud and Cloud Shadow Detection in Landsat Imagery. Remote Sens. Environ. 2012, 118, 83–94. [Google Scholar] [CrossRef]
- Zhu, Z.; Wang, S.; Woodcock, C.E. Improvement and Expansion of the Fmask Algorithm: Cloud, Cloud Shadow, and Snow Detection for Landsats 4–7, 8, and Sentinel 2 Images. Remote Sens. Environ. 2015, 159, 269–277. [Google Scholar] [CrossRef]
- Dong, Z.; Wang, M.; Li, D.; Wang, Y.; Zhang, Z. Cloud Detection Method for High Resolution Remote Sensing Imagery Based on the Spectrum and Texture of Superpixels. Photogramm. Eng. Remote Sens. 2019, 85, 257–268. [Google Scholar] [CrossRef]
- Li, P.; Dong, L.; Xiao, H.; Xu, M. A Cloud Image Detection Method Based on Svm Vector Machine. Neurocomputing 2015, 169, 34–42. [Google Scholar] [CrossRef]
- Hu, K.; Zhang, D.; Xia, M.; Qian, M.; Chen, B. Lcdnet: Light-Weighted Cloud Detection Network for High-Resolution Remote Sensing Images. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2022, 15, 4809–4823. [Google Scholar] [CrossRef]
- Shao, Z.; Pan, Y.; Diao, C.; Cai, J. Cloud Detection in Remote Sensing Images Based on Multiscale Features-Convolutional Neural Network. IEEE Trans. Geosci. Remote Sens. 2019, 57, 4062–4076. [Google Scholar] [CrossRef]
- Otsu, N. A Threshold Selection Method from Gray-Level Histograms. IEEE Trans. Syst. Man Cybern. 1979, 9, 62–66. [Google Scholar] [CrossRef] [Green Version]
- Salomonson, V.V.; Appel, I. Estimating Fractional Snow Cover from Modis Using the Normalized Difference Snow Index. Remote Sens. Environ. 2004, 89, 351–360. [Google Scholar] [CrossRef]
- Warren, S.G. Optical Properties of Ice and Snow. Philos. Trans. A Math Phys. Eng. Sci. 2019, 377, 20180161. [Google Scholar] [CrossRef]
- Lu, M.; Li, F.; Zhan, B.; Li, H.; Yang, X.; Lu, X.; Xiao, H. An Improved Cloud Detection Method for Gf-4 Imagery. Remote Sens. 2020, 12, 1525. [Google Scholar] [CrossRef]
- McFeeters, S.K. The Use of the Normalized Difference Water Index (Ndwi) in the Delineation of Open Water Features. Int. J. Remote Sens. 1996, 17, 1425–1432. [Google Scholar] [CrossRef]
- Carlson, T.N.; Ripley, D.A. On the Relation between Ndvi, Fractional Vegetation Cover, and Leaf Area Index. Remote Sens. Environ. 1997, 62, 241–252. [Google Scholar] [CrossRef]
- Zhang, Y.; Guindon, B.; Cihlar, J. An Image Transform to Characterize and Compensate for Spatial Variations in Thin Cloud Contamination of Landsat Images. Remote Sens. Environ. 2002, 82, 173–187. [Google Scholar] [CrossRef]
- Vermote, E.; Saleous, N. Ledaps Surface Reflectance Product Description; University of Maryland: College Park, MD, USA, 2007. [Google Scholar]
- Guo, Q.; Tong, L.; Yao, X.; Wu, Y.; Wan, G. Cd_Hiefnet: Cloud Detection Network Using Haze Optimized Transformation Index and Edge Feature for Optical Remote Sensing Imagery. Remote Sens. 2022, 14, 3701. [Google Scholar] [CrossRef]
- Deng, C.; Ma, W.; Yin, Y. An Edge Detection Approach of Image Fusion Based on Improved Sobel Operator. In Proceedings of the 2011 4th International Congress on Image and Signal Processing, Shanghai, China, 15–17 October 2011. [Google Scholar]
- Shen, Y.; Wang, Y.; Lv, H.; Li, H. Removal of Thin Clouds Using Cirrus and Qa Bands of Landsat-8. Photogramm. Eng. Remote Sens. 2015, 81, 721–731. [Google Scholar] [CrossRef]
- Braaten, J.D.; Cohen, W.B.; Yang, Z. Automated Cloud and Cloud Shadow Identification in Landsat Mss Imagery for Temperate Ecosystems. Remote Sens. Environ. 2015, 169, 128–138. [Google Scholar] [CrossRef] [Green Version]
- Xiong, Q.; Wang, Y.; Liu, D.; Ye, S.; Du, Z.; Liu, W.; Huang, J.; Su, W.; Zhu, D.; Yao, X.; et al. A Cloud Detection Approach Based on Hybrid Multispectral Features with Dynamic Thresholds for Gf-1 Remote Sensing Images. Remote Sens. 2020, 12, 450. [Google Scholar] [CrossRef] [Green Version]
- Sun, L.; Mi, X.; Wei, J.; Wang, J.; Tian, X.; Yu, H.; Gan, P. A Cloud Detection Algorithm-Generating Method for Remote Sensing Data at Visible to Short-Wave Infrared Wavelengths. ISPRS J. Photogramm. Remote Sens. 2017, 124, 70–88. [Google Scholar] [CrossRef]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Payload | Bands | Type | Wavelength (μm) | Resolution (m) |
|---|---|---|---|---|
| MII | B1 | Deep blue 1 | 0.374–0.427 | 10 |
| B2 | Deep blue 2 | 0.410–0.467 | ||
| B3 | Blue | 0.457–0.529 | ||
| B4 | Green | 0.510–0.597 | ||
| B5 | Red | 0.618–0.696 | ||
| B6 | Red edge | 0.744–0.813 | ||
| B7 | Near infrared | 0.798–0.911 |
| Bands | Wavelength (μm) | Solar Irradiancy (W/m2/µm) | Gain | Bias |
|---|---|---|---|---|
| B1 | 0.374–0.427 | 1532.0 | 0.051560133 | 0 |
| B2 | 0.410–0.467 | 1893.1 | 0.036241353 | 0 |
| B3 | 0.457–0.529 | 1978.4 | 0.023316835 | 0 |
| B4 | 0.510–0.597 | 1883.4 | 0.015849666 | 0 |
| B5 | 0.618–0.696 | 1613.0 | 0.016096381 | 0 |
| B6 | 0.744–0.813 | 1224.6 | 0.019719039 | 0 |
| B7 | 0.798–0.911 | 993.51 | 0.013811458 | 0 |
| Scene | Date | Center Longitude | Center Latitude | Surface |
|---|---|---|---|---|
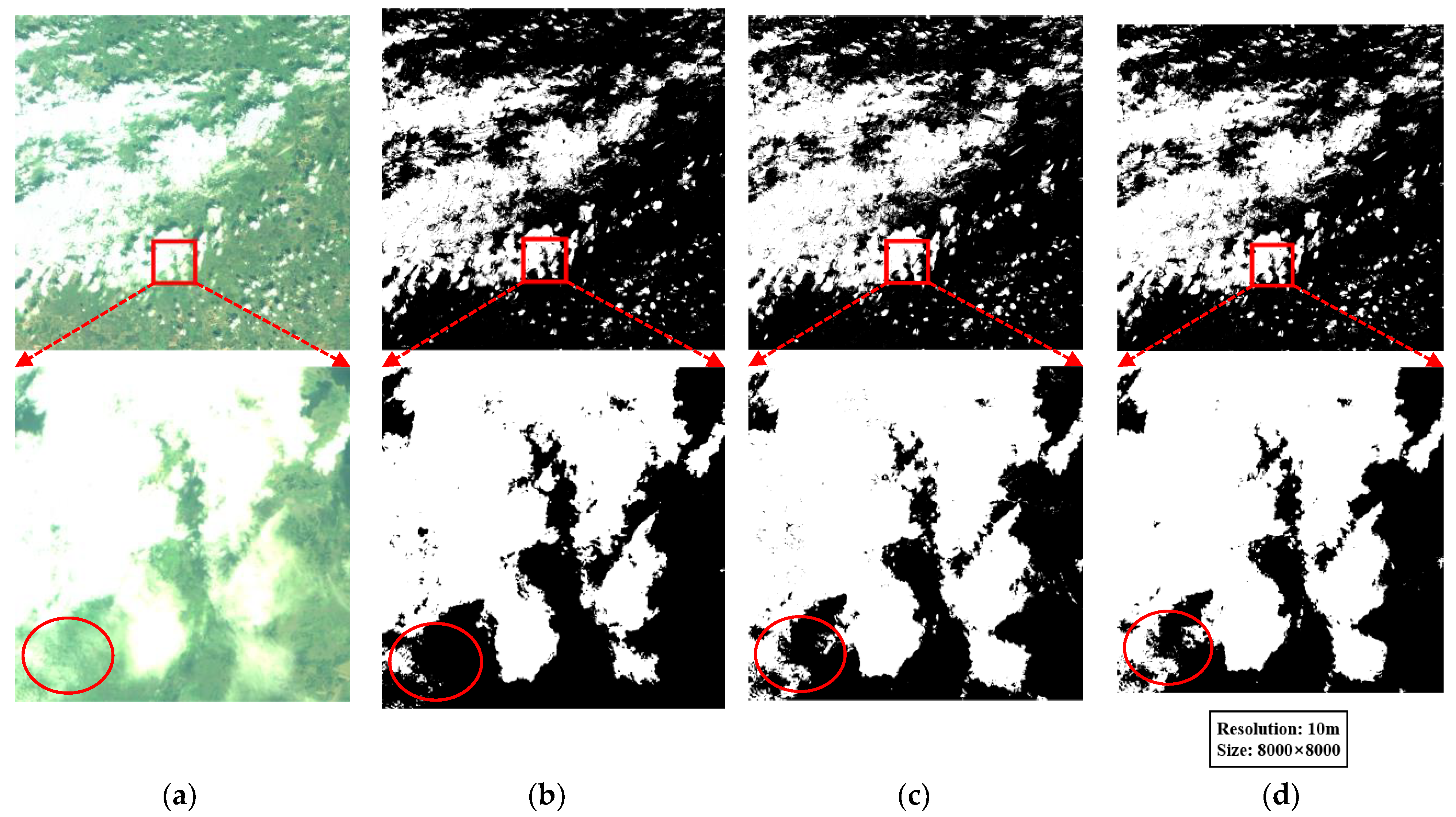
| Figure 8 | 10 August 2022 | 73.53 | 54.88 | Vegetation |
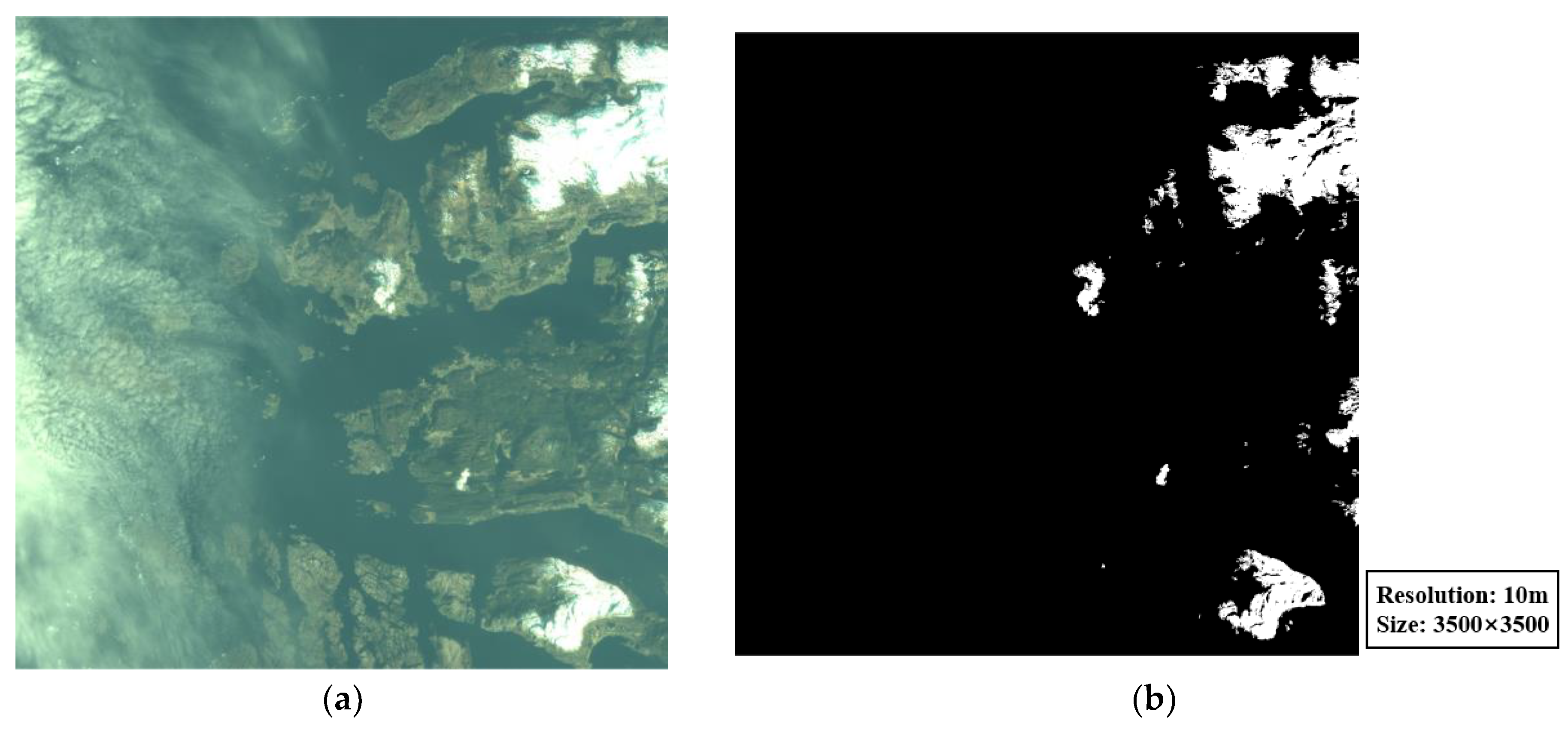
| Figure 9 | 26 March 2022 | 4.24 | 60.82 | Snow, vegetation, water |
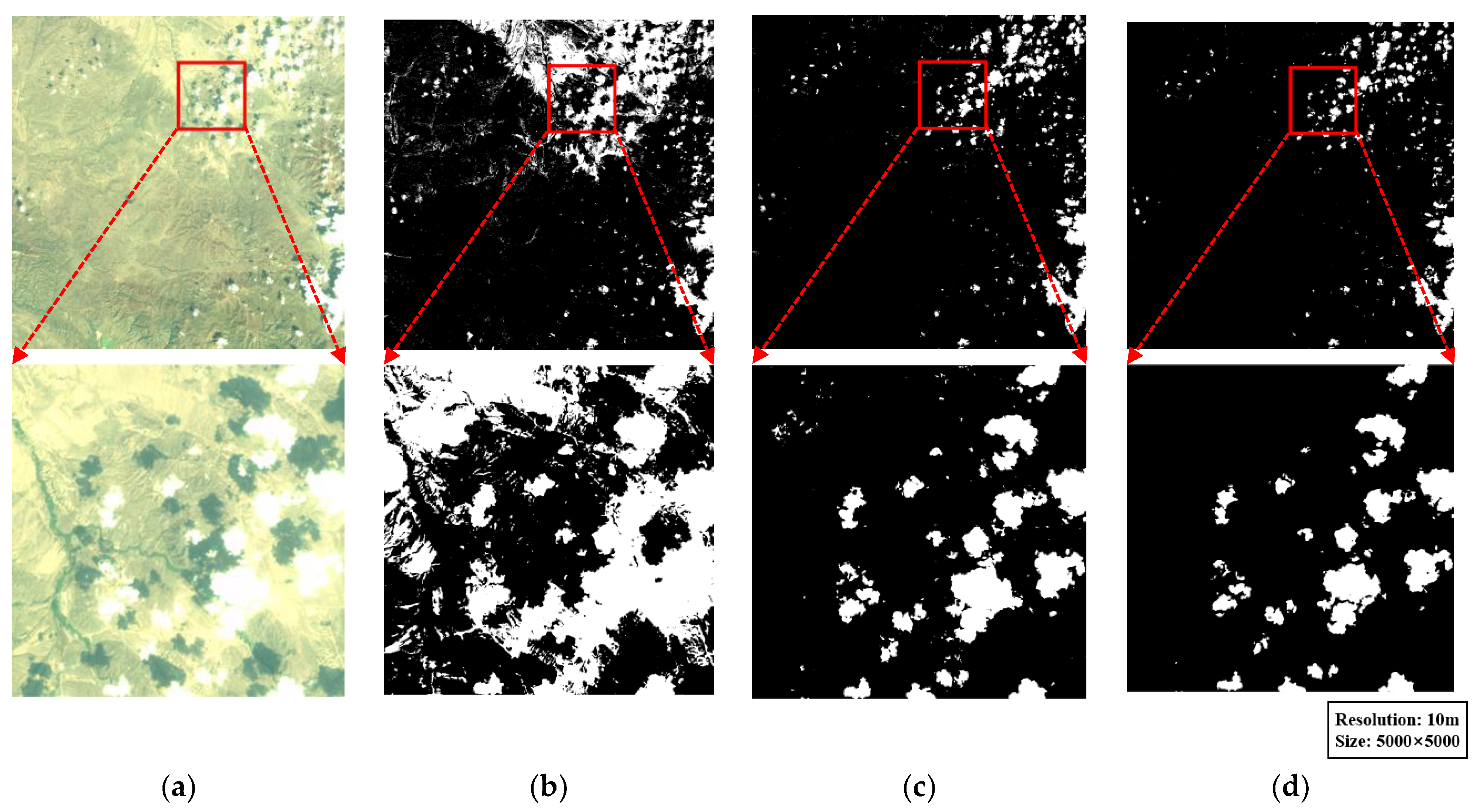
| Figure 10 | 28 August 2022 | 81.34 | 46.27 | Barren |
| Figure 11 | 8 February 2022 | 123.42 | 36.65 | Water |
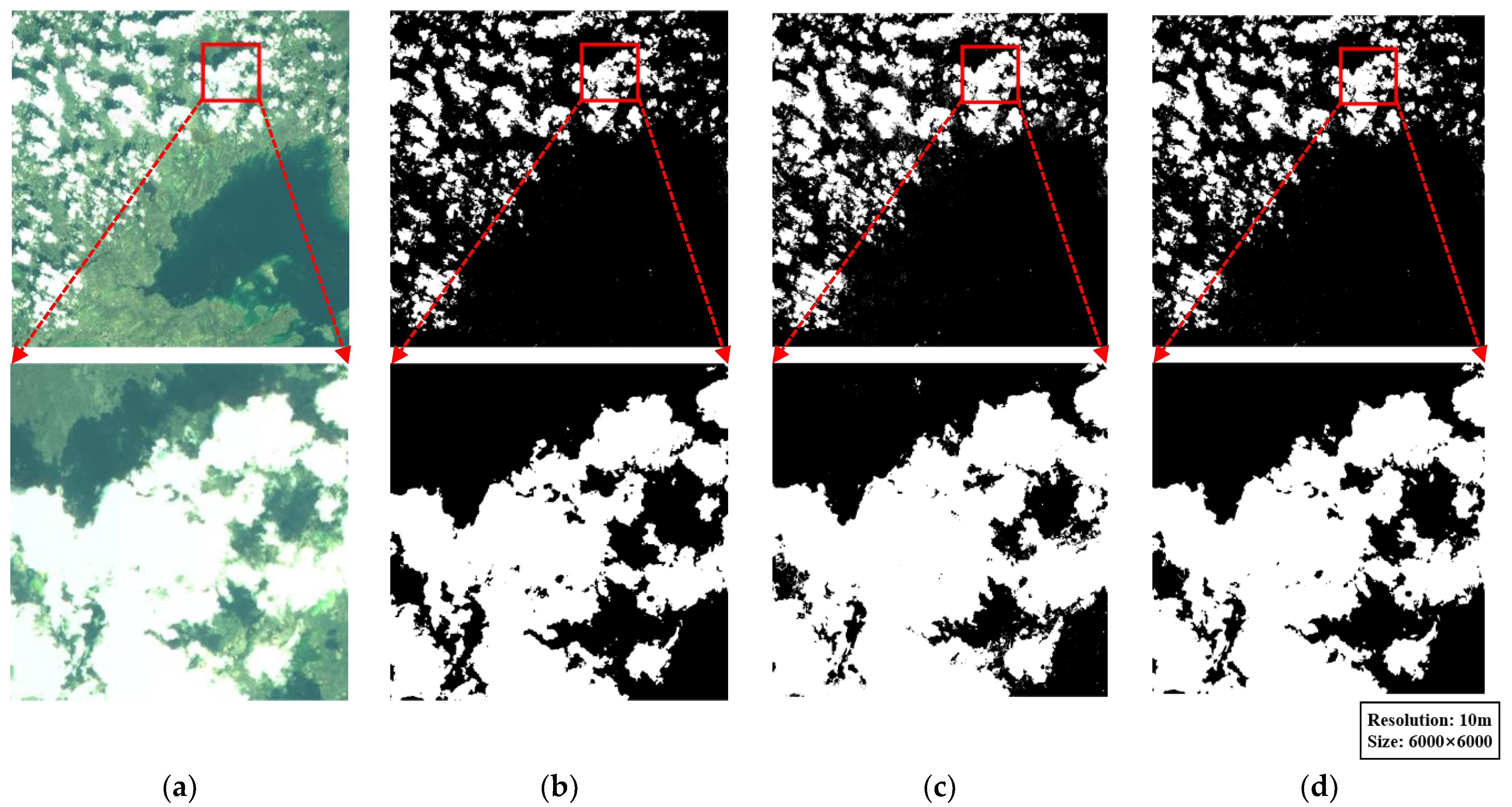
| Figure 12 | 17 June 2022 | −118.79 | 64.38 | Vegetation, water |
| Surface | MSScvm | HMF | SGF |
|---|---|---|---|
| Vegetation | 93.93% | 94.86% | 95.76% |
| Snow | 67.44% | 77.48% | 90.80% |
| Barren | 70.54% | 93.06% | 96.53% |
| Water | 94.45% | 94.51% | 94.87% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ge, K.; Liu, J.; Wang, F.; Chen, B.; Hu, Y. A Cloud Detection Method Based on Spectral and Gradient Features for SDGSAT-1 Multispectral Images. Remote Sens. 2023, 15, 24. https://doi.org/10.3390/rs15010024
Ge K, Liu J, Wang F, Chen B, Hu Y. A Cloud Detection Method Based on Spectral and Gradient Features for SDGSAT-1 Multispectral Images. Remote Sensing. 2023; 15(1):24. https://doi.org/10.3390/rs15010024
Chicago/Turabian StyleGe, Kaiqiang, Jiayin Liu, Feng Wang, Bo Chen, and Yuxin Hu. 2023. "A Cloud Detection Method Based on Spectral and Gradient Features for SDGSAT-1 Multispectral Images" Remote Sensing 15, no. 1: 24. https://doi.org/10.3390/rs15010024
APA StyleGe, K., Liu, J., Wang, F., Chen, B., & Hu, Y. (2023). A Cloud Detection Method Based on Spectral and Gradient Features for SDGSAT-1 Multispectral Images. Remote Sensing, 15(1), 24. https://doi.org/10.3390/rs15010024