
On the Choice of the Most Suitable Period to Map Hill Lakes via Spectral Separability and Object-Based Image Analyses


Abstract
:1. Introduction
2. Materials and Methods
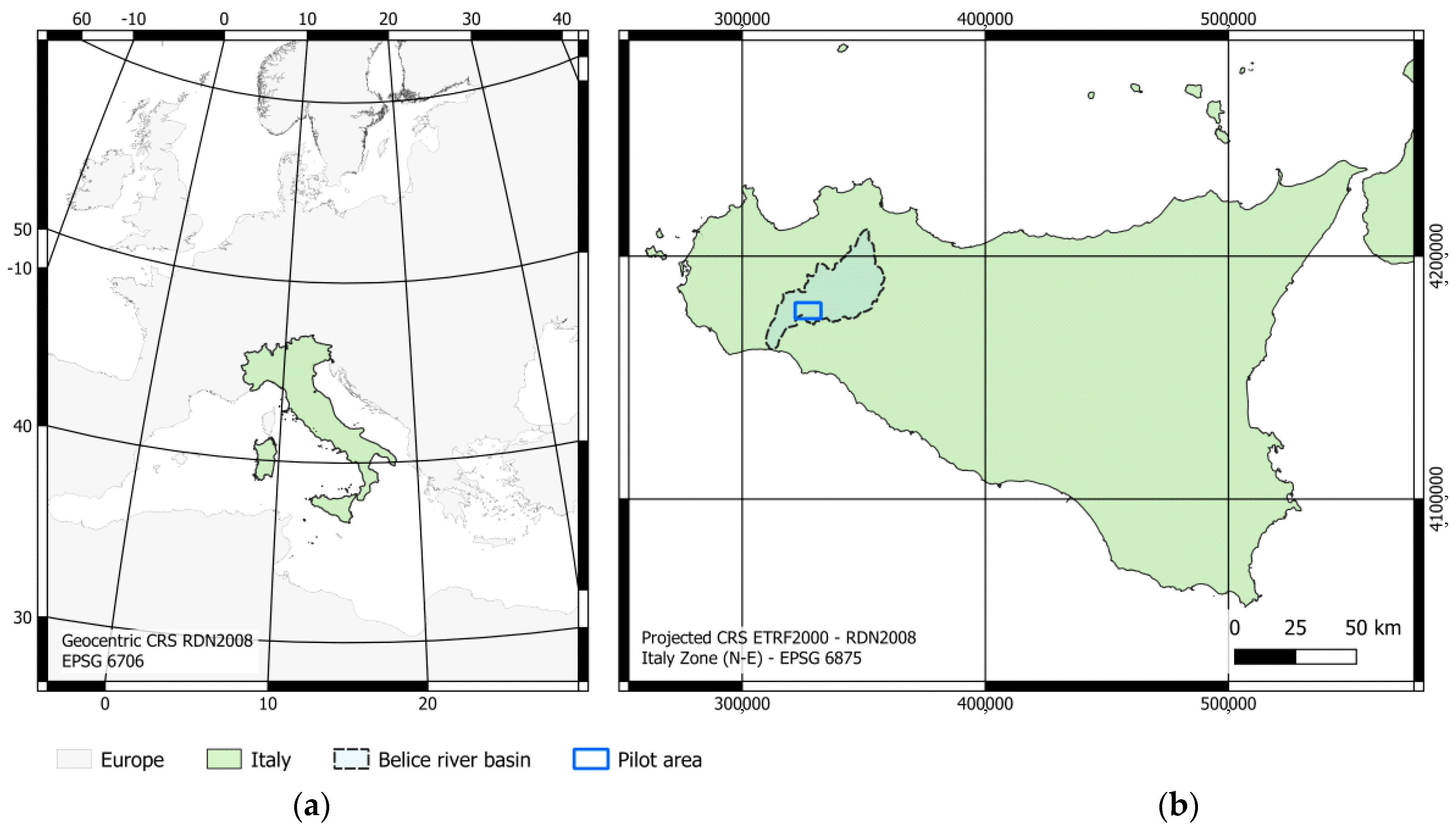
2.1. Study Area
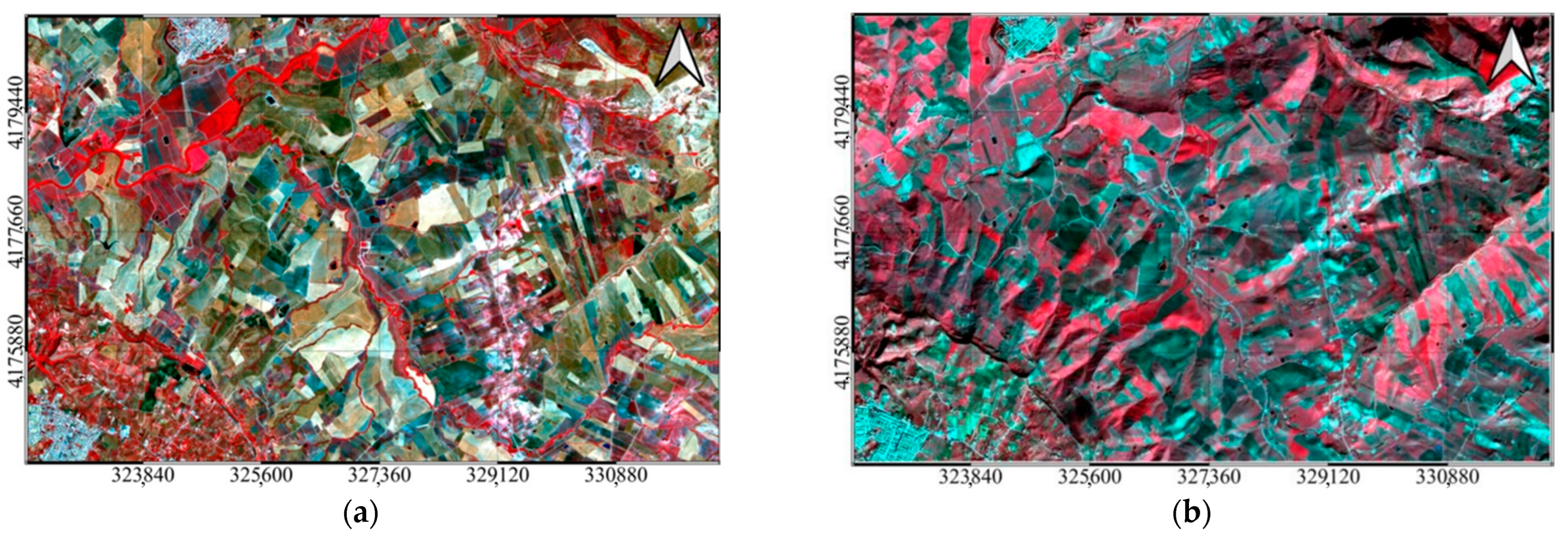
2.2. Satellite and Climate Data
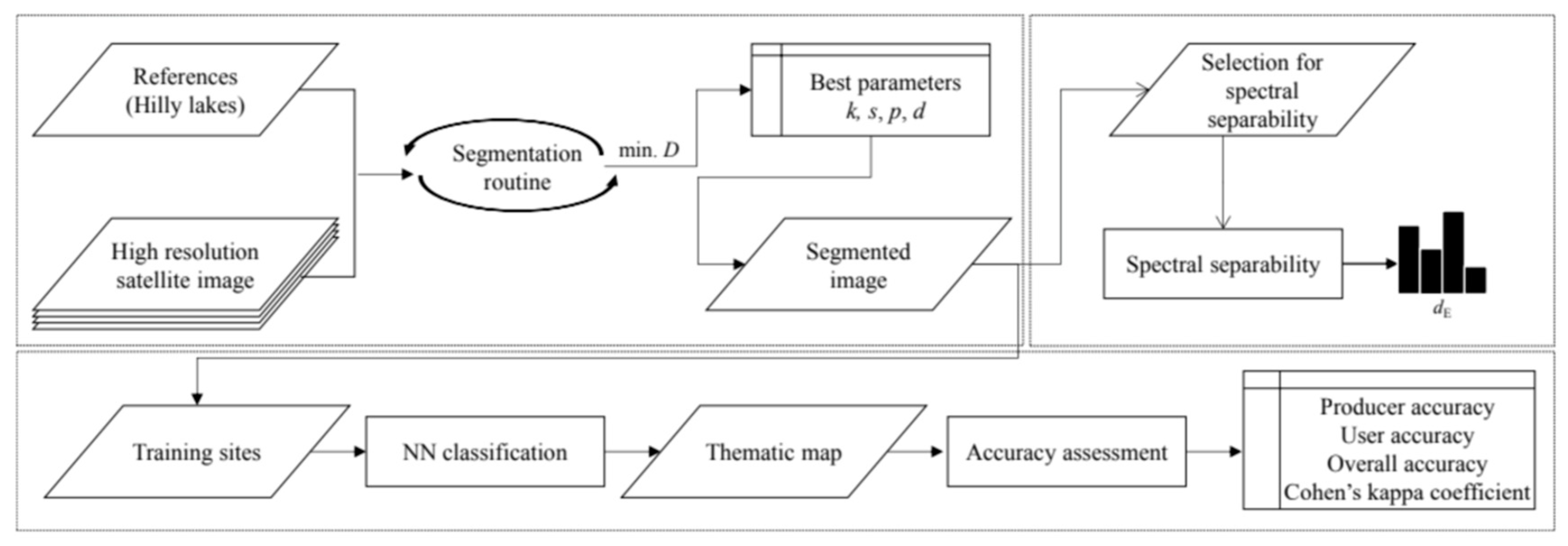
2.3. Methods
2.4. Segmentation
2.5. Spectral Separability
2.6. Classification
3. Results and Discussion
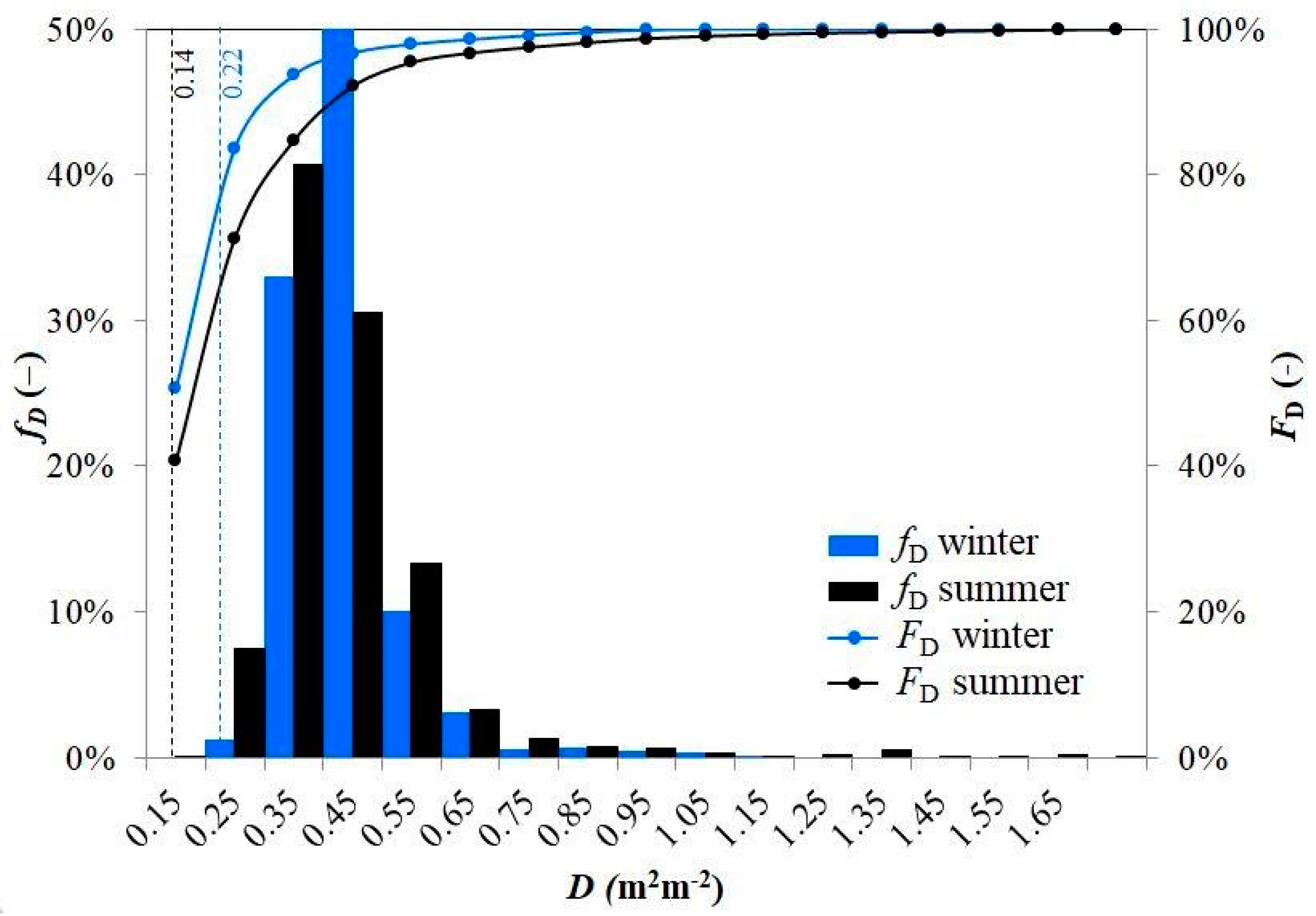
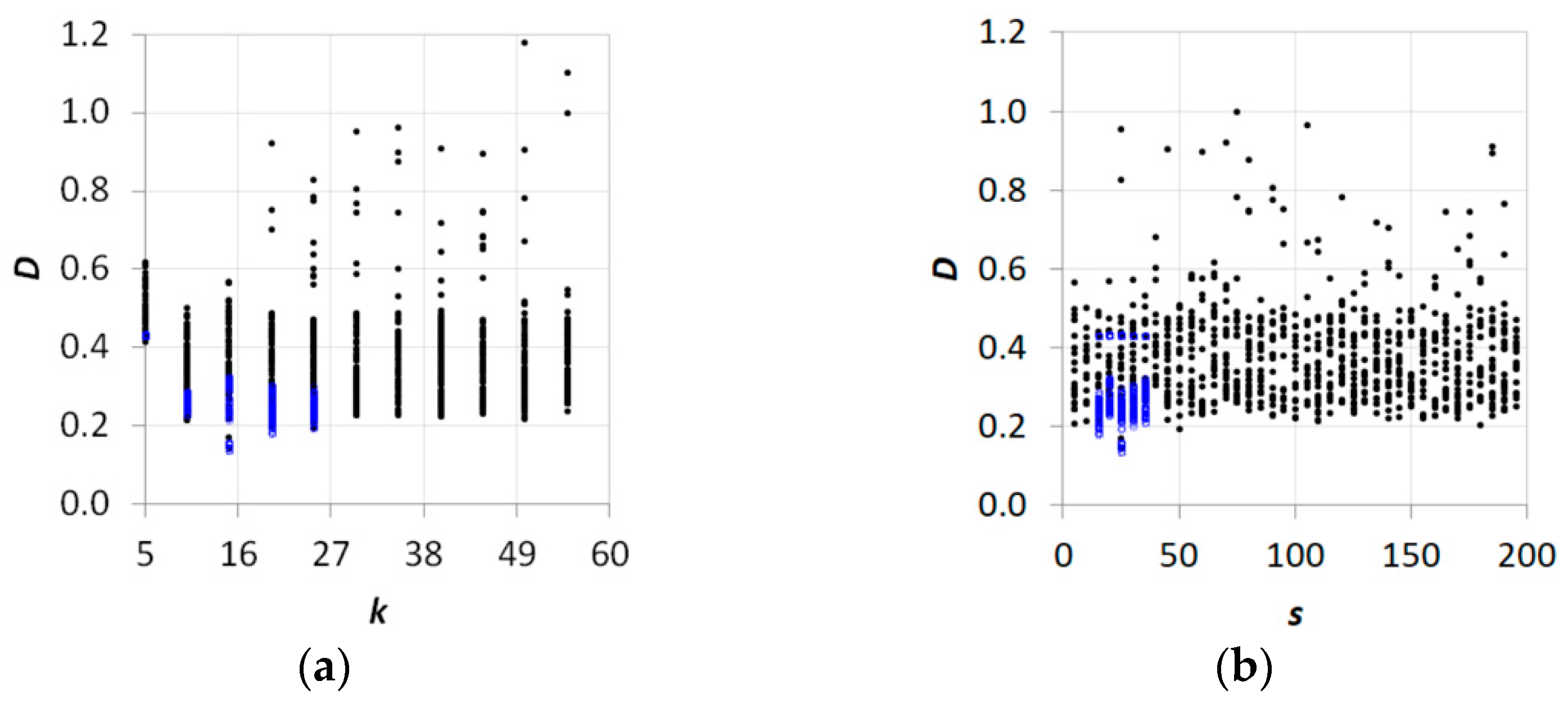
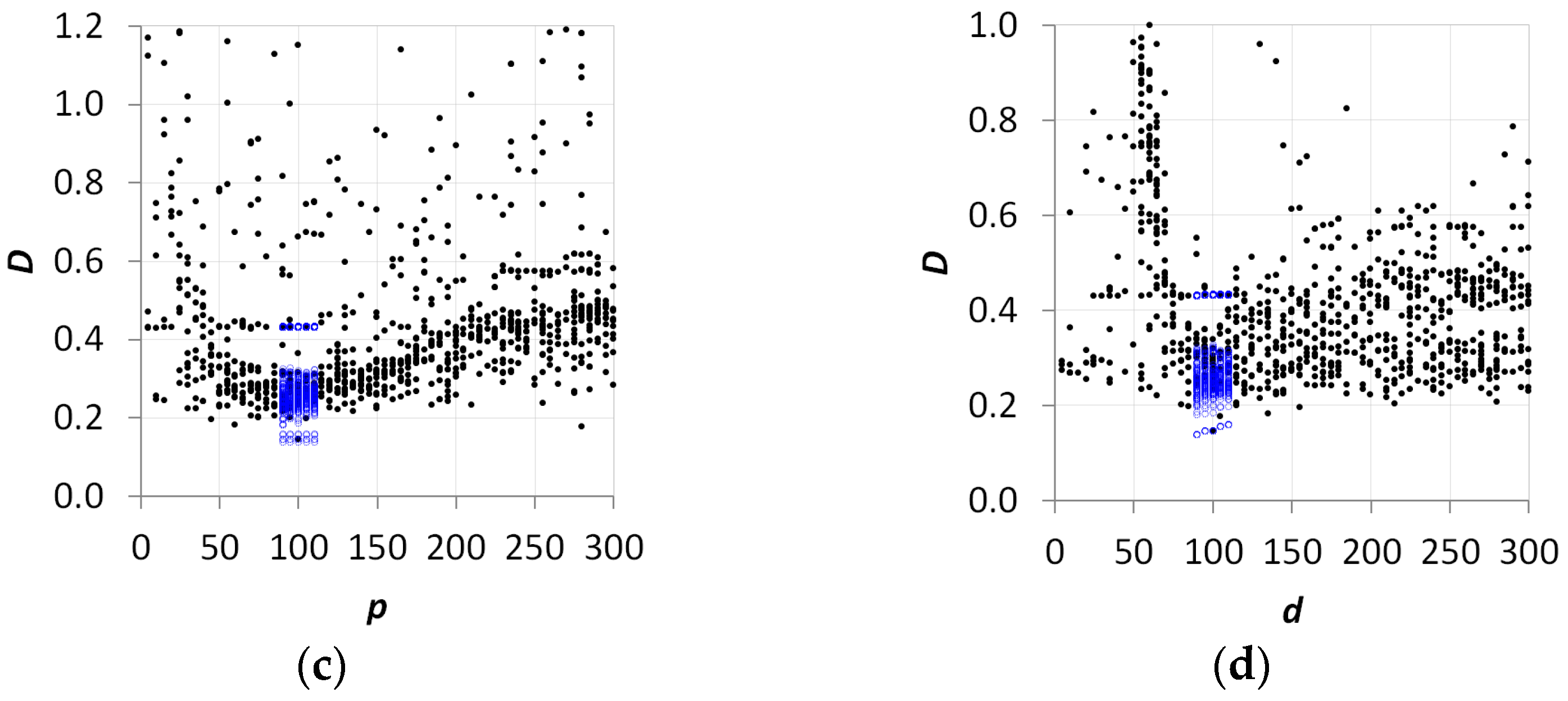
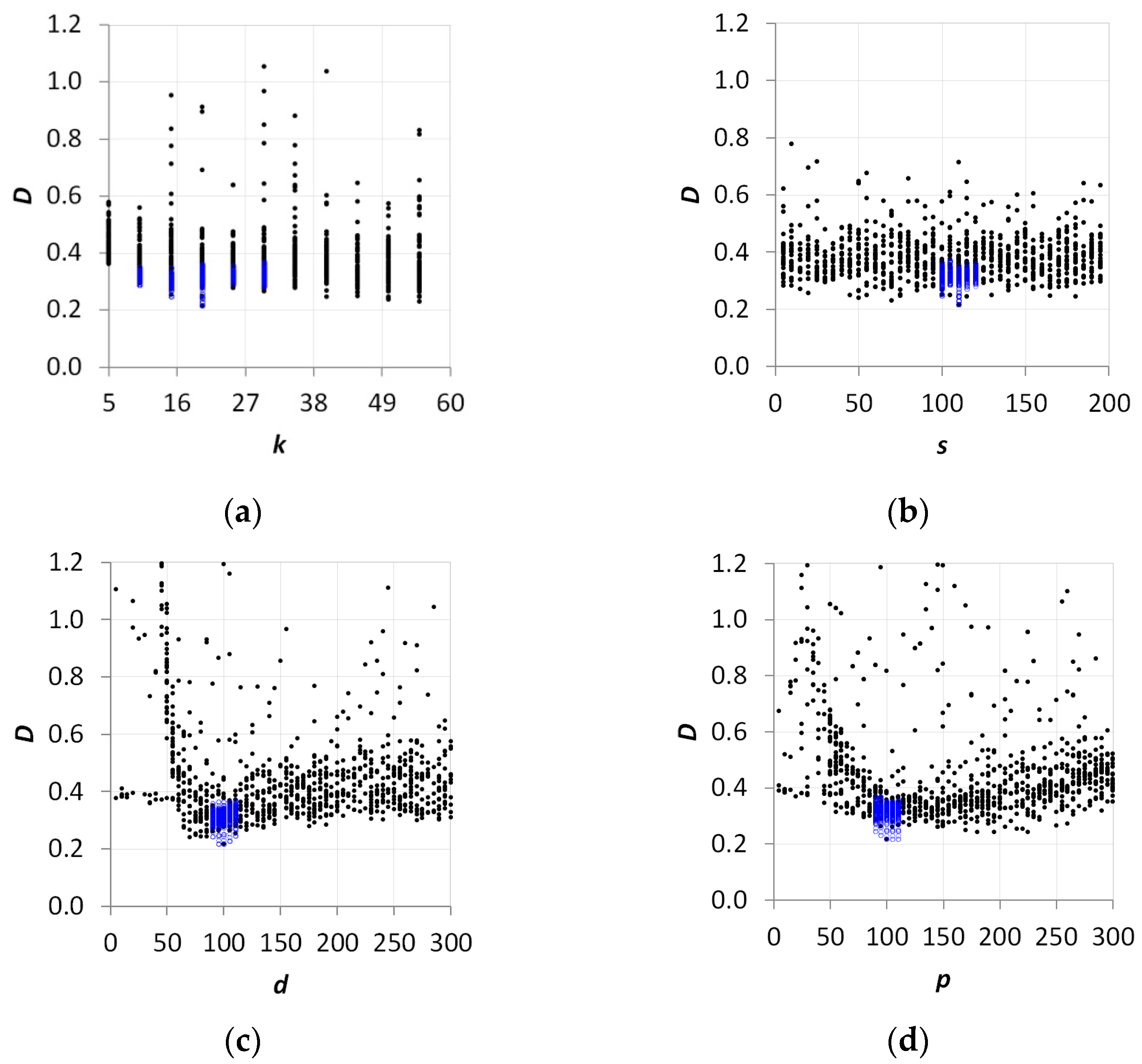
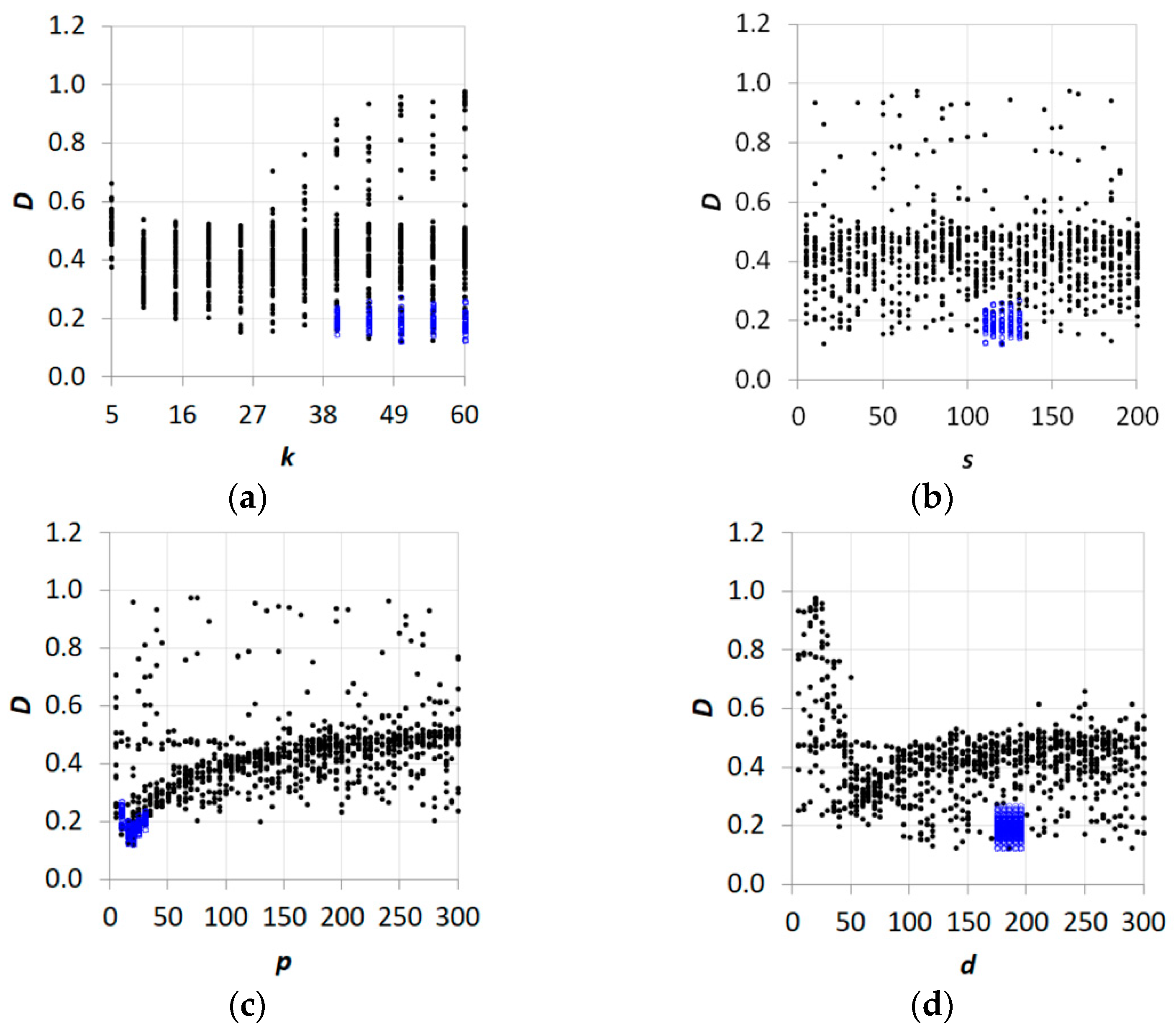
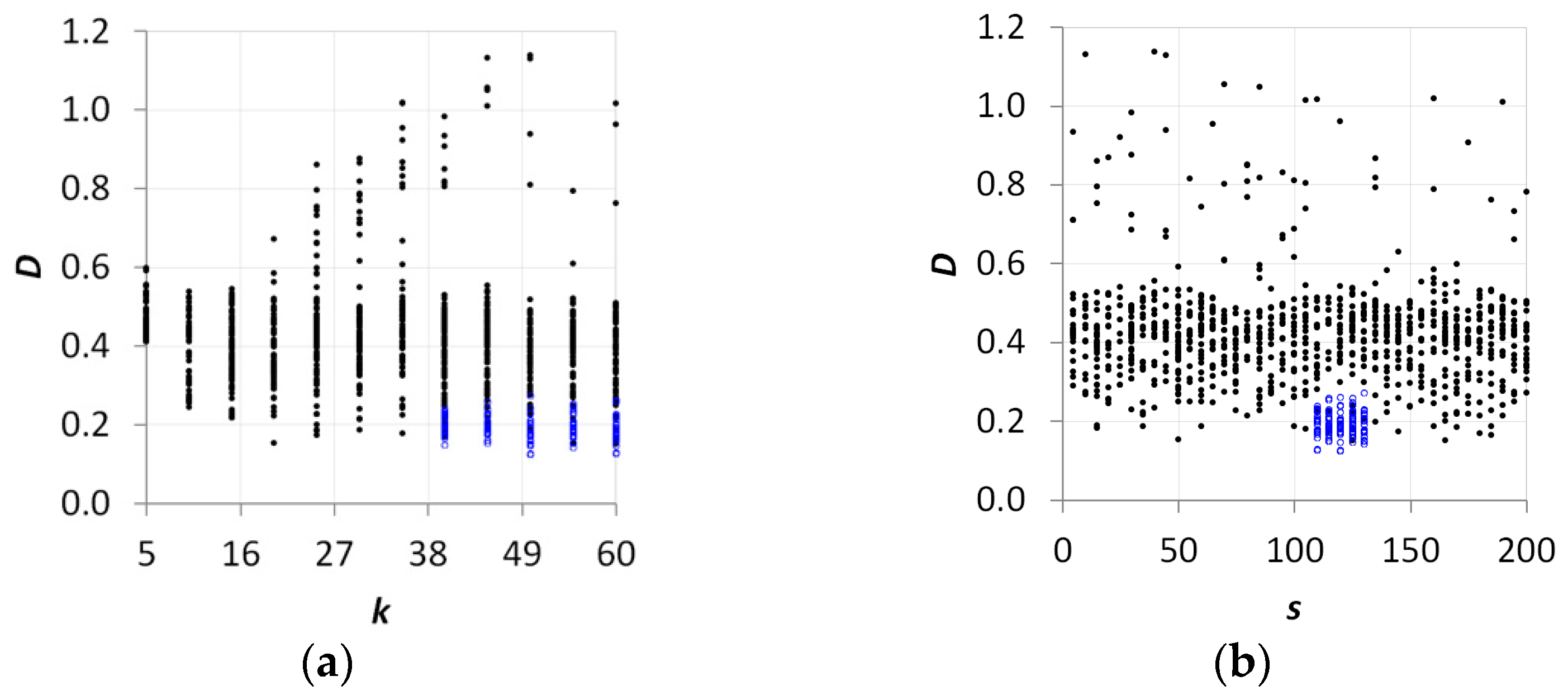
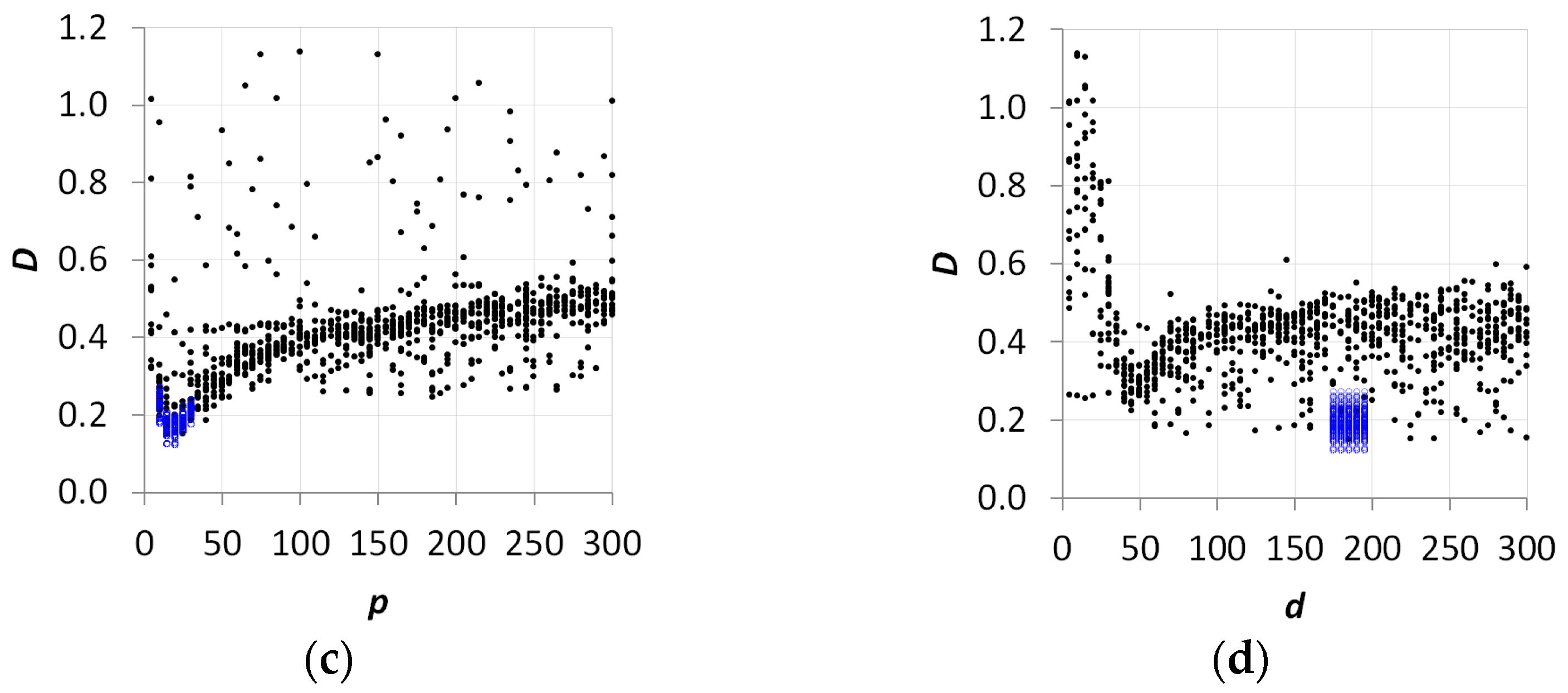
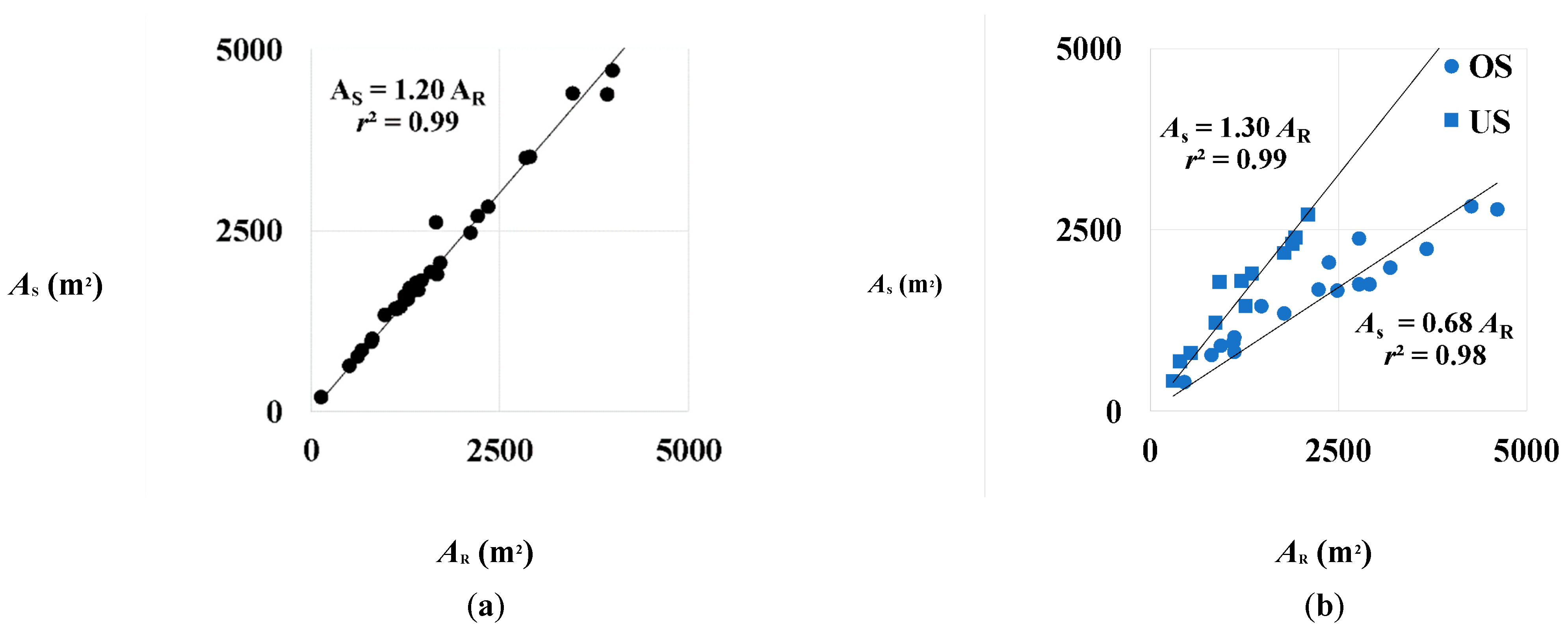
3.1. Segmentation
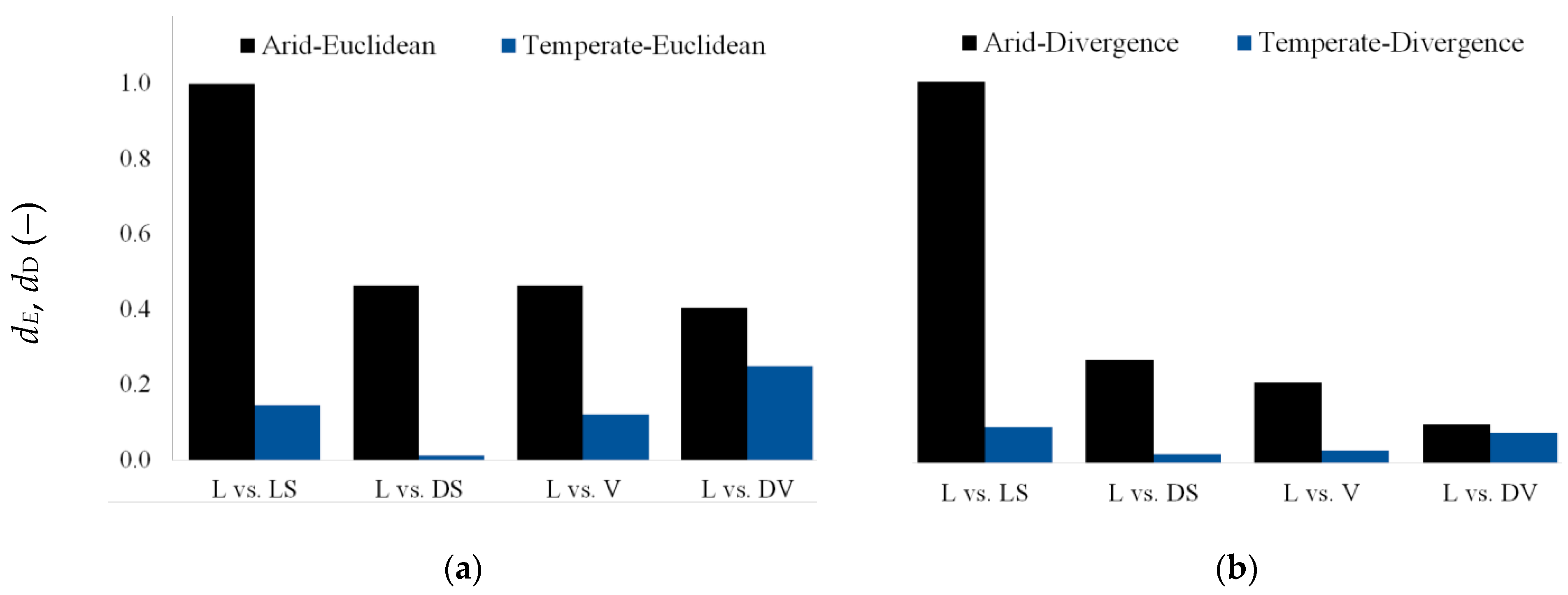
3.2. Spectral Separability
3.3. Classification
4. Conclusions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| Acronym | Meaning |
| CIR | Cooler infrared |
| CRS | Coordinates Reference Systems |
| DS | Dark soil |
| DV | Densely vegetated soil |
| GEOBIA | Geographic Object-Based Image Analysis |
| GIS | Geographic Information System |
| L | Hill lake |
| LS | Light soil |
| MODIS | Moderate Resolution Imaging Spectroradiometer |
| NIR | Near Infrared |
| NN | Nearest Neighbor classifier |
| OBIA | Object-Based Image Analysis |
| RF | Random Forest |
| RSGISLib | Remote Sensing and GIS software library |
| SIAS | Servizio Informativo Agrometereologico Siciliano, Sicilian agro-meteorological information service |
| V | Vegetated soil |
| VIIRS | Visible Infrared Imaging Radiometer Suite |
| VIS | Visible |
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Meaning | Unit |
|---|---|---|
| Area of the intersection between the reference and segmented polygons | (m2) | |
| AR | Area of the reference surfaces | (m2) |
| AS | Area of the segments | (m2) |
| CL | Misclassified entities | (number) |
| Ci, Cj | Covariance matrices of the signatures i and j | (—) |
| fD | Frequency of occurrence of D | (—) |
| FD | Cumulate of fD | (—) |
| d | Distance threshold for joining the segments | (m) |
| dE | Normalized Euclidean distance | (—) |
| dD | Normalized Divergence | (—) |
| D | Root mean square of the over and under segmentation quality metric | (—) |
| DA | D quality metric calibrated to match the areas of the reference polygons | (—) |
| DP | D quality metric calibrated to match the perimeters of the reference polygons | (—) |
| e | Level of precision error | (—) |
| k | Number of clusters | (—) |
| K | Cohen’s kappa coefficient | (—) |
| n | Number of reference segments | (—) |
| N | Total number of segments | (—) |
| NDVI | Normalized Difference Vegetation Index | (—) |
| OA | Overall accuracy | (—) |
| OS | Oversegmentation | (—) |
| p | Minimum number of pixels within a segment | (—) |
| PR | Perimeter of the reference surfaces | (m) |
| PS | Perimeter of the segments | (m) |
| PA | Producer’s accuracy | (—) |
| s | Subsampling of the image for the data used within the segmentation | (—) |
| SE | Mis-segmented entities | (number) |
| UA | User’s accuracy | (—) |
| US | Undersegmentation | (—) |
References
- Baiocchi, V.; Brigante, R.; Dominici, D.; Milone, M.V.; Mormile, M.; Radicioni, F. Automatic Three-Dimensional Features Extraction: The Case Study of L’Aquila for Collapse Identification after April 06, 2009 Earthquake. Eur. J. Remote Sens. 2014, 47, 413–435. [Google Scholar] [CrossRef]
- Blaschke, T. Object Based Image Analysis for Remote Sensing. ISPRS J. Photogramm. Remote Sens. 2010, 65, 2–16. [Google Scholar] [CrossRef] [Green Version]
- Hossain, M.D.; Chen, D. Segmentation for Object-Based Image Analysis (OBIA): A Review of Algorithms and Challenges from Remote Sensing Perspective. ISPRS J. Photogramm. Remote Sens. 2019, 150, 115–134. [Google Scholar] [CrossRef]
- Blaschke, T.; Lang, S.; Lorup, E.; Strobl, J.; Zeil, P. Object-Oriented Image Processing in an Integrated GIS/Remote Sensing Environment and Perspectives for Environmental Applications. Environ. Inf. Plan. Politics Public 2000, 2, 555–570. [Google Scholar]
- Burnett, C.; Blaschke, T. A Multi-Scale Segmentation/Object Relationship Modelling Methodology for Landscape Analysis. Ecol. Model. 2003, 168, 233–249. [Google Scholar] [CrossRef]
- Ehlers, M.; Gähler, M.; Janowsky, R. Automated Analysis of Ultra High Resolution Remote Sensing Data for Biotope Type Mapping: New Possibilities and Challenges. ISPRS J. Photogramm. Remote Sens. 2003, 57, 315–326. [Google Scholar] [CrossRef]
- Lefèvre, S.; Sheeren, D.; Tasar, O. A Generic Framework for Combining Multiple Segmentations in Geographic Object-Based Image Analysis. ISPRS Int. J. Geo-Inf. 2019, 8, 70. [Google Scholar] [CrossRef] [Green Version]
- Johnson, B.; Xie, Z. Unsupervised Image Segmentation Evaluation and Refinement Using a Multi-Scale Approach. ISPRS J. Photogramm. Remote Sens. 2011, 66, 473–483. [Google Scholar] [CrossRef]
- Drăguţ, L.; Csillik, O.; Eisank, C.; Tiede, D. Automated Parameterisation for Multi-Scale Image Segmentation on Multiple Layers. ISPRS J. Photogramm. Remote Sens. 2014, 88, 119–127. [Google Scholar] [CrossRef] [Green Version]
- Zhao, H.; Chen, F.; Zhang, M. A Systematic Extraction Approach for Mapping Glacial Lakes in High Mountain Regions of Asia. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2018, 11, 2788–2799. [Google Scholar] [CrossRef]
- Gao, B. NDWI—A Normalized Difference Water Index for Remote Sensing of Vegetation Liquid Water from Space. Remote Sens. Environ. 1996, 58, 257–266. [Google Scholar] [CrossRef]
- Cimtay, Y.; Özbay, B.; Yilmaz, G.; Bozdemir, E. A New Vegetation Index in Short-Wave Infrared Region of Electromagnetic Spectrum. IEEE Access 2021, 9, 148535–148545. [Google Scholar] [CrossRef]
- Li, S.; Sun, D.; Yu, Y.; Csiszar, I.; Stefanidis, A.; Goldberg, M.D. A New Short-Wave Infrared (SWIR) Method for Quantitative Water Fraction Derivation and Evaluation With EOS/MODIS and Landsat/TM Data. IEEE Trans. Geosci. Remote Sens. 2013, 51, 1852–1862. [Google Scholar] [CrossRef]
- Zhang, M.; Zhao, H.; Chen, F.; Zeng, J. Evaluation of Effective Spectral Features for Glacial Lake Mapping by Using Landsat-8 OLI Imagery. J. Mt. Sci. 2020, 17, 2707–2723. [Google Scholar] [CrossRef]
- Talineau, J.-C.; Selmi, S.; Alaya, K. Lacs collinaires en Tunisie semi-aride. Sci. Et Changements Planétaires/Sécheresse 1994, 5, 251–256. [Google Scholar]
- Boufaroua, M.; Slimani, M.; Oweis, T.; Alberge, J. Hill Lakes: Innovative Approach for Sustainable Rural Management in the Semi-Arid Areas in Tunisia. Glob. NEST J. 2013, 15, 366–373. [Google Scholar] [CrossRef]
- Deep Learning for Extracting Water Body from Landsat Imagery. Semantic Scholar. Available online: https://www.semanticscholar.org/paper/DEEP-LEARNING-FOR-EXTRACTING-WATER-BODY-FROM-Yang-Tian/220b6d870bc3616ac3cf9d9801000c4f16bdcd7c (accessed on 14 December 2021).
- Amitrano, D.; Martino, G.D.; Iodice, A.; Riccio, D.; Ruello, G. Small Reservoirs Extraction in Semiarid Regions Using Multitemporal Synthetic Aperture Radar Images. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2017, 10, 3482–3492. [Google Scholar] [CrossRef]
- Kaplan, G.; Avdan, U. Object-Based Water Body Extraction Model Using Sentinel-2 Satellite Imagery. Eur. J. Remote Sens. 2017, 50, 137–143. [Google Scholar] [CrossRef] [Green Version]
- Liebe, J.R.; van de Giesen, N.; Andreini, M.S.; Steenhuis, T.S.; Walter, M.T. Suitability and Limitations of ENVISAT ASAR for Monitoring Small Reservoirs in a Semiarid Area. IEEE Trans. Geosci. Remote Sens. 2009, 47, 1536–1547. [Google Scholar] [CrossRef]
- Small, C.; Okujeni, A.; van der Linden, S.; Waske, B. 6.07—Remote Sensing of Urban Environments. In Comprehensive Remote Sensing; Liang, S., Ed.; Elsevier: Oxford, UK, 2018; pp. 96–127. ISBN 978-0-12-803221-3. [Google Scholar]
- Liang, S.; Wang, J. (Eds.) Chapter 1—A Systematic View of Remote Sensing. In Advanced Remote Sensing, 2nd ed.; Academic Press: Cambridge, MA, USA, 2020; pp. 1–57. ISBN 978-0-12-815826-5. [Google Scholar]
- Liuzzo, L.; Puleo, V.; Nizza, S.; Freni, G. Parameterization of a Bayesian Normalized Difference Water Index for Surface Water Detection. Geosciences 2020, 10, 260. [Google Scholar] [CrossRef]
- Sarzana, T.; Maltese, A.; Capolupo, A.; Tarantino, E. Post-Processing of Pixel and Object-Based Land Cover Classifications of Very High Spatial Resolution Images. In Lecture Notes in Computer Science; Springer: Berlin/Heidelberg, Germany, 2020; Volume 12252, pp. 797–812. [Google Scholar] [CrossRef]
- Casadei, S.; Di Francesco, S.; Giannone, F.; Pierleoni, A. Small Reservoirs for a Sustainable Water Resources Management. Adv. Geosci. 2019, 49, 165–174. [Google Scholar] [CrossRef]
- Péguy, C.-P. Une tentative de délimitation et de schématisation des climats intertropicaux. Géocarrefour 1961, 36, 1–6. [Google Scholar] [CrossRef]
- Regione Siciliana Assessorato Agricoltura e Foreste, Gruppo IV—Servizi Allo Sviluppo, Unità di Agrometeorologia Climatologia della Sicilia. Available online: http://www.sias.regione.sicilia.it/ (accessed on 24 December 2022).
- Regione Siciliana Assessorato Risorse Agricole e Alimentari Dipartimento Interventi Strutturali SIAS—Servizio Informativo Agrometeorologico Siciliano. Available online: http://www.sias.regione.sicilia.it/ (accessed on 24 December 2022).
- Didan, K. MOD13Q1 MODIS/Terra Vegetation Indices 16-Day L3 Global 250 m SIN Grid V006. 2015. Available online: https://lpdaac.usgs.gov/products/mod13q1v006/ (accessed on 24 December 2022).
- van Leeuwen, W.J.D.; Huete, A.R.; Laing, T.W. MODIS Vegetation Index Compositing Approach: A Prototype with AVHRR Data. Remote Sens. Environ. 1999, 69, 264–280. [Google Scholar] [CrossRef]
- ORNL DAAC. MODIS and VIIRS Land Products Global Subsetting and Visualization Tool; ORNL DAAC: Oak Ridge, TN, USA, 2018. [CrossRef]
- Capodici, F.; Cammalleri, C.; Francipane, A.; Ciraolo, G.; La Loggia, G.; Maltese, A. Soil Water Content Diachronic Mapping: An FFT Frequency Analysis of a Temperature–Vegetation Index. Geosciences 2020, 10, 23. [Google Scholar] [CrossRef] [Green Version]
- Dey, V.; Zhang, Y.; Zhong, M. A Review on Image Segmentation Techniques with Remote Sensing Perspective. Environ. Sci. 2010, 38, 31–42. [Google Scholar]
- Jackson, J.A. Automated Image Segmentation for Synthetic Aperture Radar Feature Extraction. In Proceedings of the IEEE 2010 National Aerospace & Electronics Conference, Dayton, OH, USA, 14–16 July 2010; pp. 45–49. [Google Scholar]
- Wang, S.-H.; Sun, J.; Phillips, P.; Zhao, G.; Zhang, Y.-D. Polarimetric Synthetic Aperture Radar Image Segmentation by Convolutional Neural Network Using Graphical Processing Units. J. Real-Time Image Process. 2018, 15, 631–642. [Google Scholar] [CrossRef]
- Gautam, S.; Singhai, J. Cosine-Similarity Watershed Algorithm for Water-Body Segmentation Applying Deep Neural Network Classifier. Environ. Earth Sci. 2022, 81, 251. [Google Scholar] [CrossRef]
- Babu, A.A.; Rajam, V.M.A. Water-Body Segmentation from Satellite Images Using Kapur’s Entropy-Based Thresholding Method. Comput. Intell. 2020, 36, 1242–1260. [Google Scholar] [CrossRef]
- Duan, L.; Hu, X. Multiscale Refinement Network for Water-Body Segmentation in High-Resolution Satellite Imagery. IEEE Geosci. Remote Sens. Lett. 2020, 17, 686–690. [Google Scholar] [CrossRef]
- Li, Z.; Wang, R.; Zhang, W.; Hu, F.; Meng, L. Multiscale Features Supported DeepLabV3+ Optimization Scheme for Accurate Water Semantic Segmentation. IEEE Access 2019, 7, 155787–155804. [Google Scholar] [CrossRef]
- Miao, Z.; Fu, K.; Sun, H.; Sun, X.; Yan, M. Automatic Water-Body Segmentation From High-Resolution Satellite Images via Deep Networks. IEEE Geosci. Remote Sens. Lett. 2018, 15, 602–606. [Google Scholar] [CrossRef]
- Weng, L.; Xu, Y.; Xia, M.; Zhang, Y.; Liu, J.; Xu, Y. Water Areas Segmentation from Remote Sensing Images Using a Separable Residual SegNet Network. ISPRS Int. J. Geo-Inf. 2020, 9, 256. [Google Scholar] [CrossRef]
- Yuan, K.; Zhuang, X.; Schaefer, G.; Feng, J.; Guan, L.; Fang, H. Deep-Learning-Based Multispectral Satellite Image Segmentation for Water Body Detection. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2021, 14, 7422–7434. [Google Scholar] [CrossRef]
- Zhang, Z.; Lu, M.; Ji, S.; Yu, H.; Nie, C. Rich CNN Features for Water-Body Segmentation from Very High Resolution Aerial and Satellite Imagery. Remote Sens. 2021, 13, 1912. [Google Scholar] [CrossRef]
- Felzenszwalb, P.F.; Huttenlocher, D.P. Efficient Graph-Based Image Segmentation. Int. J. Comput. Vis. 2004, 59, 167–181. [Google Scholar] [CrossRef]
- Shepherd, J.D.; Bunting, P.; Dymond, J.R. Operational Large-Scale Segmentation of Imagery Based on Iterative Elimination. Remote Sens. 2019, 11, 658. [Google Scholar] [CrossRef] [Green Version]
- Bunting, P.; Clewley, D.; Lucas, R.M.; Gillingham, S. Remote Sensing and GIS Software Library (RSGISLib). Comput. Geosci. 2014, 62, 216–226. [Google Scholar] [CrossRef]
- Chen, Y.; Chen, Q.; Jing, C. Multi-Resolution Segmentation Parameters Optimization and Evaluation for VHR Remote Sensing Image Based on MeanNSQI and Discrepancy Measure. J. Spat. Sci. 2021, 66, 253–278. [Google Scholar] [CrossRef]
- Karakış, S.; Marangoz, A.; Buyuksalih, G. Analysis of Segmentation Parameters in Ecognition Software Using High Resolution Quickbird Ms Imagery. In Proceedings of the ISPRS Workshop on Topographic Mapping from Space, Ankara, Turkey, 14–16 February 2006. [Google Scholar]
- Mean Shift: A Robust Approach toward Feature Space Analysis|IEEE Journals & Magazine|IEEE Xplore. Available online: https://ieeexplore.ieee.org/document/1000236 (accessed on 16 July 2022).
- Michel, J.; Feuvrier, T.; Inglada, J. Reference Algorithm Implementations in OTB: Textbook Cases. In Proceedings of the 2009 IEEE International Geoscience and Remote Sensing Symposium, Cape Town, South Africa, 12–17 July 2009; Volume 4, pp. IV-741–IV-744. [Google Scholar]
- Liu, Y.; Bian, L.; Meng, Y.; Wang, H.; Zhang, S.; Yang, Y.; Shao, X.; Wang, B. Discrepancy Measures for Selecting Optimal Combination of Parameter Values in Object-Based Image Analysis. ISPRS J. Photogramm. Remote Sens. 2012, 68, 144–156. [Google Scholar] [CrossRef]
- El-naggar, A.M. Determination of Optimum Segmentation Parameter Values for Extracting Building from Remote Sensing Images. Alex. Eng. J. 2018, 57, 3089–3097. [Google Scholar] [CrossRef]
- Weidner, U. Contribution to the Assessment of Segmentation Quality for Remote Sensing Applications. Int. Arch. Photogramm. Remote Sens. 2008, 37, 479–484. [Google Scholar]
- Eisank, C.; Smith, M.; Hillier, J. Assessment of Multiresolution Segmentation for Delimiting Drumlins in Digital Elevation Models. Geomorphology 2014, 214, 452–464. [Google Scholar] [CrossRef]
- Ramezan, C.A.; Warner, T.A.; Maxwell, A.E. Evaluation of Sampling and Cross-Validation Tuning Strategies for Regional-Scale Machine Learning Classification. Remote Sens. 2019, 11, 185. [Google Scholar] [CrossRef] [Green Version]
- Puranik, Y.; Sahinidis, N.V. Domain Reduction Techniques for Global NLP and MINLP Optimization. Constraints 2017, 22, 338–376. [Google Scholar] [CrossRef] [Green Version]
- Swain, P.H.; Davis, S.M. (Eds.) Remote Sensing; The Quantitative Approach; McGraw-Hill College: London, UK; New York, NY, USA, 1979; ISBN 978-0-07-062576-1. [Google Scholar]
- Swain, P.H.; Davis, S.M. Remote Sensing: The Quantitative Approach. IEEE Trans. Pattern Anal. Mach. Intell. 1981, PAMI-3, 713–714. [Google Scholar] [CrossRef]
- Shivakumar, B.R.; Rajashekararadhya, S.V. Spectral Similarity for Evaluating Classification Performance of Traditional Classifiers. In Proceedings of the 2017 International Conference on Wireless Communications, Signal Processing and Networking, Chennai, India, 22–24 March 2017; pp. 1999–2004. [Google Scholar]
- Optimum Band Selection for Supervised Classification of Multispectral Data. Semantic Scholar. Available online: https://www.semanticscholar.org/paper/Optimum-Band-Selection-for-Supervised-of-Data/9693651d1240e3034a8049fbc0cd1c5cbaf65428 (accessed on 13 December 2021).
- Renard, X.; Laugel, T.; Detyniecki, M. Understanding Prediction Discrepancies in Machine Learning Classifiers. arXiv 2021, arXiv:2104.05467. [Google Scholar]
- Pedregosa, F.; Varoquaux, G.; Gramfort, A.; Michel, V.; Thirion, B.; Grisel, O.; Blondel, M.; Müller, A.; Nothman, J.; Louppe, G.; et al. Scikit-Learn: Machine Learning in Python. arXiv 2018, arXiv:1201.0490. [Google Scholar]
- Mountrakis, G.; Im, J.; Ogole, C. Support Vector Machines in Remote Sensing: A Review. ISPRS J. Photogramm. Remote Sens. 2011, 66, 247–259. [Google Scholar] [CrossRef]
- Sharma, R.; Ghosh, A.; Joshi, P.K. Decision Tree Approach for Classification of Remotely Sensed Satellite Data Using Open Source Support. J. Earth Syst. Sci. 2013, 122, 1237–1247. [Google Scholar] [CrossRef] [Green Version]
- Miller, D.M.; Kaminsky, E.J.; Rana, S. Neural Network Classification of Remote-Sensing Data. Comput. Geosci. 1995, 21, 377–386. [Google Scholar] [CrossRef]
- Seidl, T. Nearest Neighbor Classification. In Encyclopedia of Database Systems; Liu, L., Özsu, M.T., Eds.; Springer: Boston, MA, USA, 2009; pp. 1885–1890. ISBN 978-0-387-39940-9. [Google Scholar]
- Yamane, T. Statistics: An Introductory Analysis, 2nd ed.; Harper and Row: New York, NY, USA, 1967. [Google Scholar]
- Nkomeje, F. Comparative Performance of Multi-Source Reference Data to Assess the Accuracy of Classified Remotely Sensed Imagery: Example of Landsat 8 OLI Across Kigali City-Rwanda 2015. Int. J. Eng. Work. 2017, 4, 10–20. [Google Scholar]
- Hoekstra, M.; Jiang, M.; Clausi, D.A.; Duguay, C. Lake Ice-Water Classification of RADARSAT-2 Images by Integrating IRGS Segmentation with Pixel-Based Random Forest Labeling. Remote Sens. 2020, 12, 1425. [Google Scholar] [CrossRef]
- Geurts, P.; Ernst, D.; Wehenkel, L. Extremely Randomized Trees. Mach. Learn. 2006, 63, 3–42. [Google Scholar] [CrossRef] [Green Version]
- Story, M.; Congalton, R.G. Accuracy Assessment: A User’s Perspective. Photogramm. Eng. Remote Sens. 1986, 52, 397–399. [Google Scholar]
- Cohen, J. A Coefficient of Agreement for Nominal Scales. Educ. Psychol. Meas. 1960, 20, 37–46. [Google Scholar] [CrossRef]
- Rwanga, S.S.; Ndambuki, J.M. Accuracy Assessment of Land Use/Land Cover Classification Using Remote Sensing and GIS. IJG 2017, 8, 611–622. [Google Scholar] [CrossRef]
- Analysis of Classification Results of Remotely Sensed Data and Evaluation of Classification Algorithms. Semantic Scholar. Available online: https://www.semanticscholar.org/paper/Analysis-of-classification-results-of-remotely-data-Zhuang-Engel/58e57a879542a0a7711eebc6d7311555731da9b8 (accessed on 27 December 2021).
- Smits, P.C.; Dellepiane, S.G.; Schowengerdt, R.A. Quality Assessment of Image Classification Algorithms for Land-Cover Mapping: A Review and a Proposal for a Cost-Based Approach. Int. J. Remote Sens. 1999, 20, 1461–1486. [Google Scholar] [CrossRef]
- Congalton, R.G.; Oderwald, R.G.; Mead, R.A. Assessing Landsat Classification Accuracy Using Discrete Multivariate Analysis Statistical Techniques. Photogramm. Eng. Remote Sens. 1983, 49, 1671–1678. [Google Scholar]
- Agresti, A.; Ghosh, A.; Bini, M. Raking Kappa: Describing Potential Impact of Marginal Distributions on Measures of Agreement. Biom. J. 1995, 37, 811–820. [Google Scholar] [CrossRef]
- Stehman, S.V. A Critical Evaluation of the Normalized Error Matrix in Map Accuracy Assessment. Photogramm. Eng. Remote Sens. 2004, 70, 743–751. [Google Scholar] [CrossRef]
- Byrt, T.; Bishop, J.; Carlin, J.B. Bias, Prevalence and Kappa. J. Clin. Epidemiol. 1993, 46, 423–429. [Google Scholar] [CrossRef] [PubMed]
- Fleiss, J.L.; Levin, B.; Paik, M.C.; Fleiss, J. Statistical Methods for Rates & Proportions, 3rd ed.; Wiley-Interscience: Hoboken, NJ, USA, 2003; ISBN 978-0-471-52629-2. [Google Scholar]
- Monserud, R.A.; Leemans, R. Comparing Global Vegetation Maps with the Kappa Statistic. Ecol. Model. 1992, 62, 275–293. [Google Scholar] [CrossRef]
- Landis, J.R.; Koch, G.G. The Measurement of Observer Agreement for Categorical Data. Biometrics 1977, 33, 159–174. [Google Scholar] [CrossRef] [Green Version]
- Avisse, N.; Tilmant, A.; Müller, M.F.; Zhang, H. Monitoring Small Reservoirs’ Storage with Satellite Remote Sensing in Inaccessible Areas. Hydrol. Earth Syst. Sci. 2017, 21, 6445–6459. [Google Scholar] [CrossRef] [Green Version]
- Pipitone, C.; Maltese, A.; Dardanelli, G.; Brutto, M.L.; Loggia, G.L. Monitoring Water Surface and Level of a Reservoir Using Different Remote Sensing Approaches and Comparison with Dam Displacements Evaluated via GNSS. Remote Sens. 2018, 10, 71. [Google Scholar] [CrossRef] [Green Version]
- Maltese, A.; Pipitone, C.; Dardanelli, G.; Capodici, F.; Muller, J.-P. Toward a Comprehensive Dam Monitoring: On-Site and Remote-Retrieved Forcing Factors and Resulting Displacements (GNSS and PS–InSAR). Remote Sens. 2021, 13, 1543. [Google Scholar] [CrossRef]
- Divya, Y.; Gopinathan, P. Soil Water Content Measurement Using Hyper-Spectral Remote Sensing Techniques—A Case Study from North-Western Part of Tamil Nadu, India. Remote Sens. Appl. Soc. Environ. 2019, 14, 1–7. [Google Scholar] [CrossRef]
- Ciraolo, G.; Cox, E.; La Loggia, G.; Maltese, A. The Classification of Submerged Vegetation Using Hyperspectral MIVIS Data. Ann. Geophys. 2006, 49, 287–294. [Google Scholar] [CrossRef]
- Liu, H.; He, B.; Zhou, Y.; Kutser, T.; Toming, K.; Feng, Q.; Yang, X.; Fu, C.; Yang, F.; Li, W.; et al. Trophic State Assessment of Optically Diverse Lakes Using Sentinel-3-Derived Trophic Level Index. Int. J. Appl. Earth Obs. Geoinf. 2022, 114, 103026. [Google Scholar] [CrossRef]
- Zepner, L.; Karrasch, P.; Wiemann, F.; Bernard, L. ClimateCharts.Net—An Interactive Climate Analysis Web Platform. Int. J. Digit. Earth 2021, 14, 338–356. [Google Scholar] [CrossRef]














| k | S | P | d | DA | |
|---|---|---|---|---|---|
| 1st phase range: both | [5, 60] | [5, 200] | [5, 300] | [5, 300] | |
| 2nd phase range: arid | [5, 25] | [15, 35] | [90, 110] | [90, 110] | |
| temperate | [10, 30] | [100, 120] | [90, 110] | [90, 110] | |
| best parameters: arid | 15 | 25 | 105 | 90 | 0.14 |
| temperate | 20 | 110 | 105 | 95 | 0.22 |
| k | S | p | d | DP | |
|---|---|---|---|---|---|
| 1st phase range: both | [5, 60] | [5, 200] | [5, 300] | [5, 300] | |
| 2nd phase range: arid | [40, 60] | [110, 130] | [10, 30] | [175, 195] | |
| temperate | [45, 65] | [115, 135] | [5, 25] | [175, 195] | |
| best parameters: arid | 50 | 120 | 20 | 185 | 0.12 |
| temperate | 55 | 125 | 15 | 185 | 0.15 |
| Euclidean | Divergence | |
|---|---|---|
| Pilot area, arid period | 0.49 | 0.39 |
| Pilot area, temperate period | 0.12 | 0.14 |
| Classified | |||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Arid Period | Temperate Period | ||||||||||||
| L | LS | DS | DV | V | PA | L | LS | DS | DV | V | PA | ||
| Reference | L | 30 | 0 | 6 (CL) | 4 (3CL + 1SE) | 0 | 0.75 | 7 | 0 | 5 (CL) | 0 | 0 | 0.58 |
| LS | 0 | 20 | 4 | 0 | 0 | 0.83 | 0 | 27 | 1 | 1 | 1 | 0.90 | |
| DS | 0 | 3 | 15 | 0 | 0 | 0.83 | 23 (SE) | 3 | 22 | 6 | 2 | 0.39 | |
| DV | 0 | 0 | 0 | 23 | 7 | 0.77 | 0 | 0 | 2 | 18 | 1 | 0.86 | |
| V | 0 | 7 | 5 | 3 | 23 | 0.61 | 0 | 0 | 0 | 5 | 26 | 0.84 | |
| UA | 1 | 0.67 | 0.50 | 0.77 | 0.77 | 0.23 | 0.90 | 0.73 | 0.60 | 0.87 | |||
| OA | 0.74 | 0.67 | |||||||||||
| K | 0.68 | 0.58 | |||||||||||
| Classified | |||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Arid Period | Temperate Period | ||||||||||||
| L | LS | DS | DV | V | PA | L | LS | DS | DV | V | PA | ||
| Reference | L | 1 | 0 | 0 | 0 | 0 | 1 | 0.58 | 0 | 0.42 | 0 | 0 | 0.58 |
| LS | 0 | 0.83 | 0.17 | 0 | 0 | 0.83 | 0 | 0.93 | 0.03 | 0.02 | 0.02 | 0.93 | |
| DS | 0 | 0.17 | 0.83 | 0 | 0 | 0.83 | 0.42 | 0.07 | 0.41 | 0.07 | 0.03 | 0.41 | |
| DV | 0 | 0 | 0 | 0.83 | 0.17 | 0.83 | 0 | 0 | 0.14 | 0.79 | 0.06 | 0.88 | |
| V | 0 | 0 | 0 | 0.16 | 0.83 | 0.83 | 0 | 0 | 0 | 0.12 | 0.88 | 0.88 | |
| UA | 1 | 0.83 | 0.83 | 0.83 | 0.83 | 0.58 | 0.93 | 0.41 | 0.79 | 0.88 | |||
| OA | 0.87 | 0.72 | |||||||||||
| K | 0.83 | 0.65 | |||||||||||
| Classified | |||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Not Normalized Error Matrix | Normalized Error Matrix | ||||||||||||
| L | LS | DS | DV | V | PA | L | LS | DS | DV | V | PA | ||
| Reference | L | 21 | 0 | 4 | 2 | 3 | 0.70 | 0.71 | 0 | 0.15 | 0.05 | 0.08 | 0.71 |
| LS | 0 | 24 | 2 | 0 | 2 | 0.86 | 0 | 0.83 | 0.10 | 0 | 0.07 | 0.83 | |
| DS | 7 | 3 | 21 | 7 | 5 | 0.49 | 0.17 | 0.06 | 0.56 | 0.11 | 0.10 | 0.56 | |
| DV | 2 | 0 | 2 | 18 | 0 | 0.82 | 0.12 | 0 | 0.14 | 0.74 | 0 | 0.75 | |
| V | 0 | 3 | 1 | 3 | 20 | 0.74 | 0 | 0.11 | 0.05 | 0.09 | 0.75 | 0.75 | |
| UA | 0.70 | 0.80 | 0.70 | 0.60 | 0.67 | 0.71 | 0.83 | 0.56 | 0.74 | 0.75 | |||
| OA | 0.69 | 0.72 | |||||||||||
| K | 0.62 | 0.65 | |||||||||||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Maltese, A. On the Choice of the Most Suitable Period to Map Hill Lakes via Spectral Separability and Object-Based Image Analyses. Remote Sens. 2023, 15, 262. https://doi.org/10.3390/rs15010262
Maltese A. On the Choice of the Most Suitable Period to Map Hill Lakes via Spectral Separability and Object-Based Image Analyses. Remote Sensing. 2023; 15(1):262. https://doi.org/10.3390/rs15010262
Chicago/Turabian StyleMaltese, Antonino. 2023. "On the Choice of the Most Suitable Period to Map Hill Lakes via Spectral Separability and Object-Based Image Analyses" Remote Sensing 15, no. 1: 262. https://doi.org/10.3390/rs15010262
APA StyleMaltese, A. (2023). On the Choice of the Most Suitable Period to Map Hill Lakes via Spectral Separability and Object-Based Image Analyses. Remote Sensing, 15(1), 262. https://doi.org/10.3390/rs15010262