




A Remote Sensing Method for Crop Mapping Based on Multiscale Neighborhood Feature Extraction


Abstract
:1. Introduction
- (1)
- A multiscale attentional convolutional network for crop mapping that uses multiscale convolution to obtain spatial and spectral features in target pixel domains and reduces the spatial inconsistency and boundary ambiguity problems of pixel-based crop-mapping methods;
- (2)
- An analysis of the influence of neighborhood size on the salt and pepper noise phenomenon and boundary ambiguity in crop mapping;
- (3)
- Coordinate convolution that can be used to enhance the spatial features of a target pixel field and a CBAM that can be used to enhance the spectral and temporal features of a target pixel field.
2. Study Area and Dataset
2.1. Study Area and Reference Data
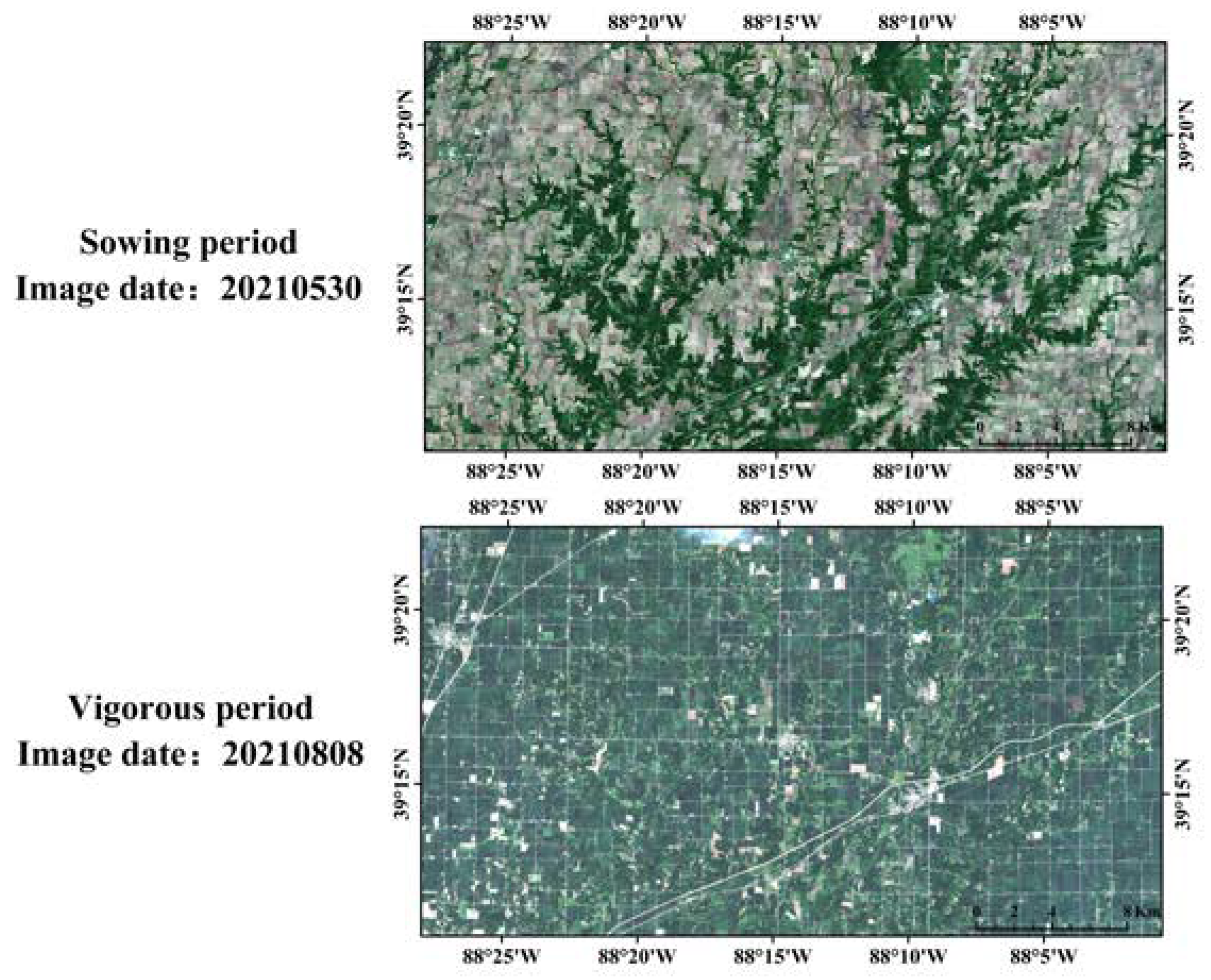
2.2. Image Dataset
3. Methodology
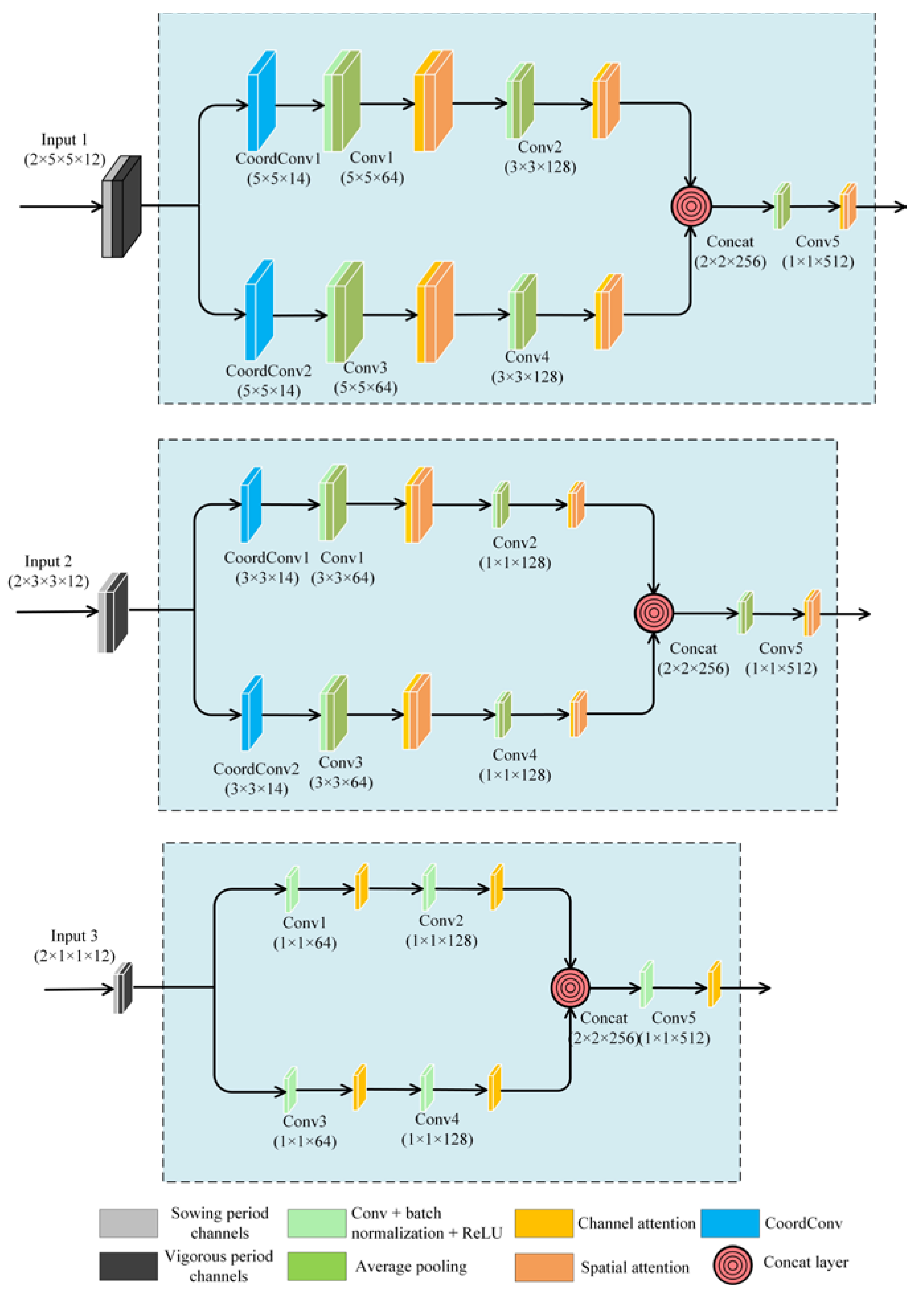
3.1. Network Structure
3.2. Coordinate Convolution
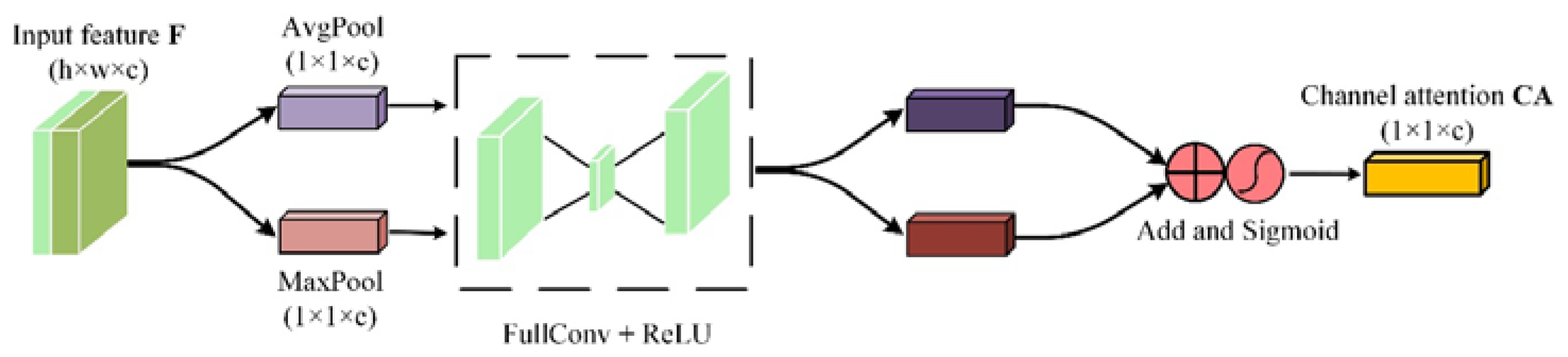
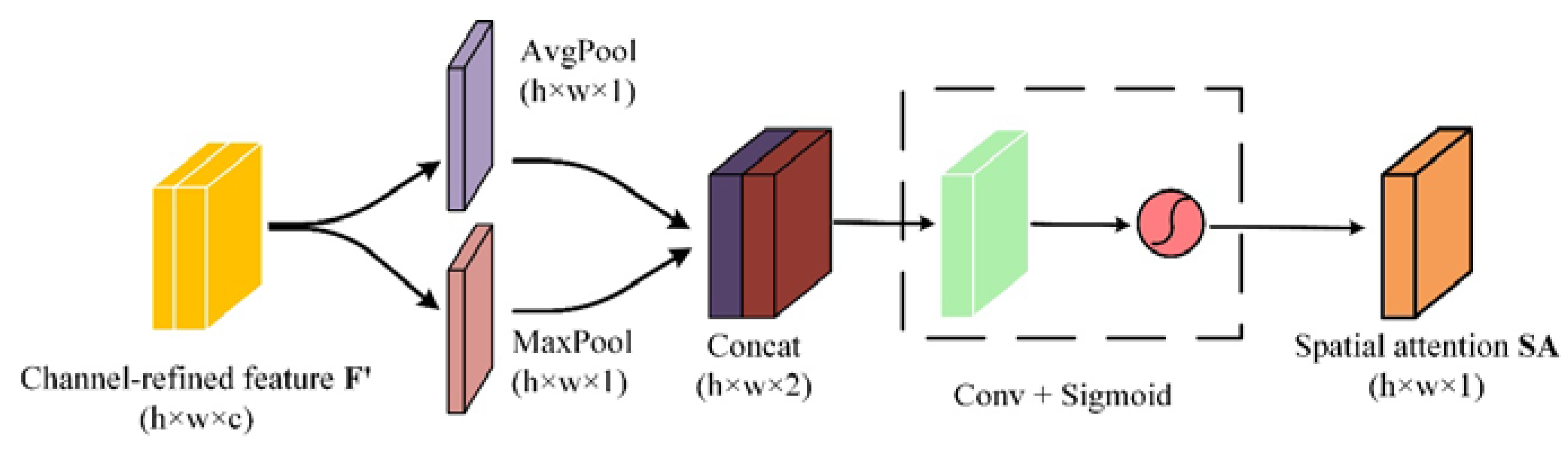
3.3. Convolutional Block Attention Module
3.3.1. Channel Convolutional Attention Module
3.3.2. Spatial Convolutional Attention Module
3.3.3. Multiscale Convolutional Block Attention Module
3.4. Implementation Details
3.5. Pixel-Level Accuracy Evaluation Metrics
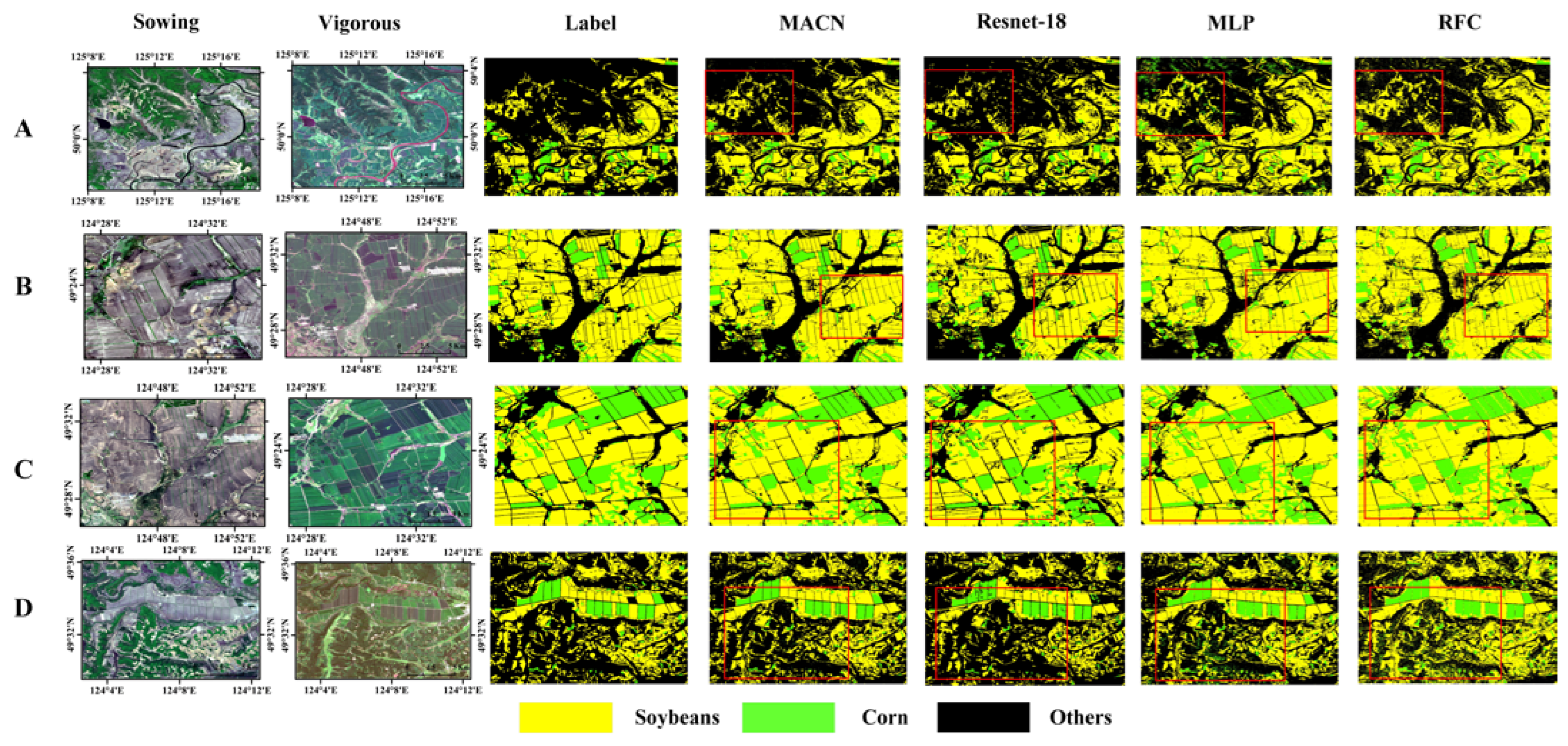
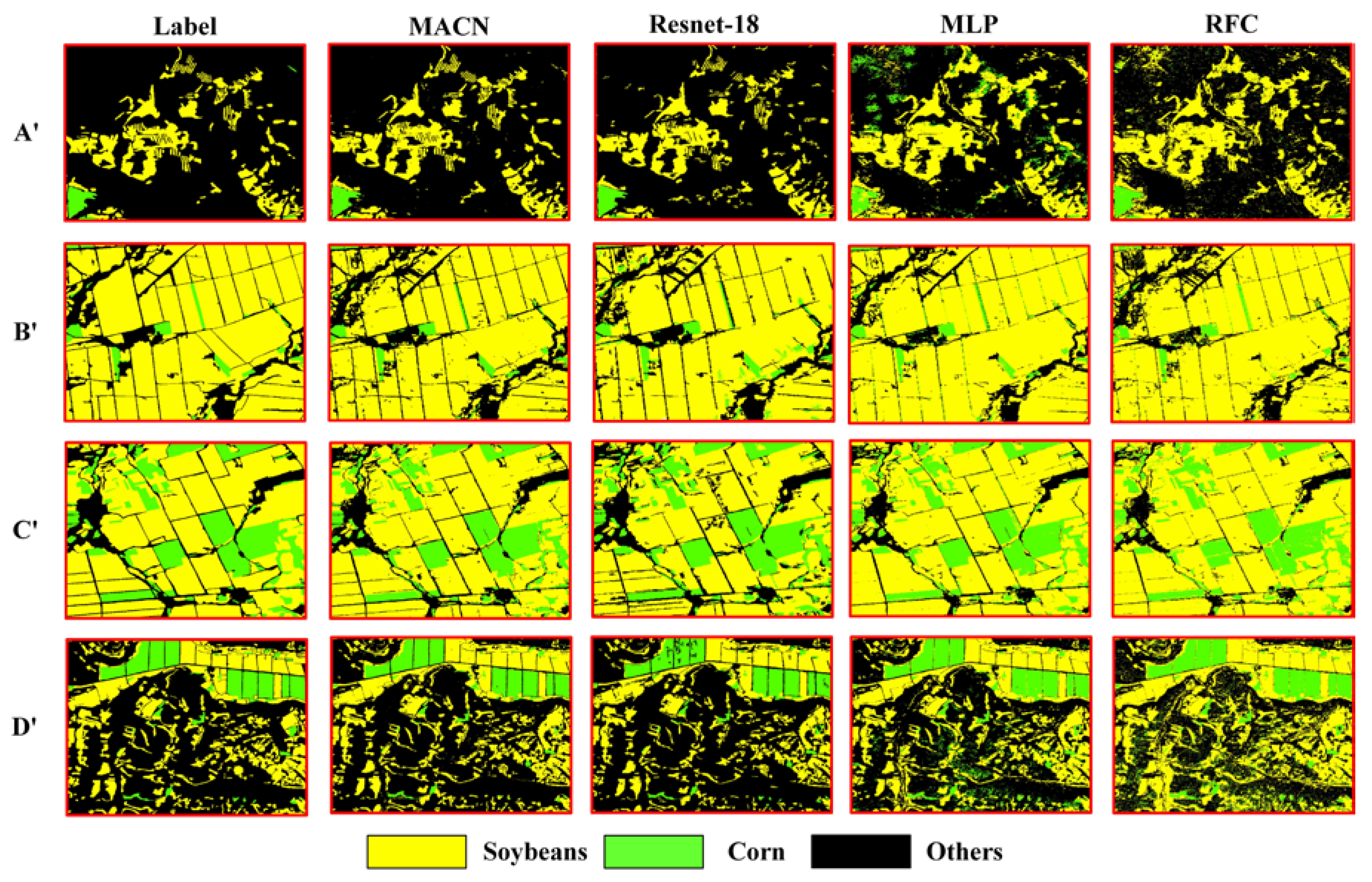
4. Results
5. Discussion
5.1. Validity of Window Size
5.2. The Role of CBAM and Coordinate Convolution in MACN Networks
5.3. Spatial Generalizability
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Godfray, H.C.J.; Beddington, J.R.; Crute, I.R.; Haddad, L.; Lawrence, D.; Muir, J.F.; Pretty, J.; Robinson, S.; Thomas, S.M.; Toulmin, C. Food Security: The Challenge of Feeding 9 Billion People. Science (1979) 2010, 327, 812–818. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Foley, J.A.; Ramankutty, N.; Brauman, K.A.; Cassidy, E.S.; Gerber, J.S.; Johnston, M.; Mueller, N.D.; O’Connell, C.; Ray, D.K.; West, P.C.; et al. Solutions for a Cultivated Planet. Nature 2011, 478, 337–342. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Food Security, Farming, and Climate Change to 2050: Scenarios, Results, Policy Options; International Food Policy Research Institute: Washington, DC, USA, 2010.
- Rogan, J.; Franklin, J.; Roberts, D.A. A Comparison of Methods for Monitoring Multitemporal Vegetation Change Using Thematic Mapper Imagery. Remote Sens. Environ. 2002, 80, 143–156. [Google Scholar] [CrossRef]
- Scott, G.; Rajabifard, A. Sustainable Development and Geospatial Information: A Strategic Framework for Integrating a Global Policy Agenda into National Geospatial Capabilities. Geo-Spat. Inf. Sci. 2017, 20, 59–76. [Google Scholar] [CrossRef] [Green Version]
- Benz, U.C.; Hofmann, P.; Willhauck, G.; Lingenfelder, I.; Heynen, M. Multi-Resolution, Object-Oriented Fuzzy Analysis of Remote Sensing Data for GIS-Ready Information. ISPRS J. Photogramm. Remote Sens. 2004, 58, 239–258. [Google Scholar] [CrossRef]
- Luo, C.; Qi, B.; Liu, H.; Guo, D.; Lu, L.; Fu, Q.; Shao, Y. Using Time Series Sentinel-1 Images for Object-Oriented Crop Classification in Google Earth Engine. Remote Sens. 2021, 13, 561. [Google Scholar] [CrossRef]
- Garcia-Pedrero, A.; Lillo-Saavedra, M.; Rodriguez-Esparragon, D.; Gonzalo-Martin, C. Deep Learning for Automatic Outlining Agricultural Parcels: Exploiting the Land Parcel Identification System. IEEE Access 2019, 7, 158223–158236. [Google Scholar] [CrossRef]
- Jiao, X.; Kovacs, J.M.; Shang, J.; McNairn, H.; Walters, D.; Ma, B.; Geng, X. Object-Oriented Crop Mapping and Monitoring Using Multi-Temporal Polarimetric RADARSAT-2 Data. ISPRS J. Photogramm. Remote Sens. 2014, 96, 38–46. [Google Scholar] [CrossRef]
- Geirhos, R.; Michaelis, C.; Wichmann, F.A.; Rubisch, P.; Bethge, M.; Brendel, W. Imagenet-Trained CNNs Are Biased towards Texture; Increasing Shape Bias Improves Accuracy and Robustness. In Proceedings of the 7th International Conference on Learning Representations, ICLR 2019, New Orleans, LA, USA, 6–9 May 2019. [Google Scholar]
- sainte Fare Garnot, V.; Landrieu, L.; Giordano, S.; Chehata, N. Satellite Image Time Series Classification with Pixel-Set Encoders and Temporal Self-Attention. In Proceedings of the IEEE Computer Society Conference on Computer Vision and Pattern Recognition, Seattle, WA, USA, 13–19 June 2020. [Google Scholar]
- Alganci, U.; Sertel, E.; Ozdogan, M.; Ormeci, C. Parcel-Level Identification of Crop Types Using Different Classification Algorithms and Multi-Resolution Imagery in Southeastern Turkey. Photogramm. Eng. Remote Sens. 2013, 79, 1053–1065. [Google Scholar] [CrossRef]
- Garnot, V.S.F.; Landrieu, L. Panoptic Segmentation of Satellite Image Time Series with Convolutional Temporal Attention Networks. In Proceedings of the IEEE International Conference on Computer Vision, Montreal, QC, Canada, 10–17 October 2021. [Google Scholar]
- Boryan, C.; Yang, Z.; Mueller, R.; Craig, M. Monitoring US Agriculture: The US Department of Agriculture, National Agricultural Statistics Service, Cropland Data Layer Program. Geocarto Int. 2011, 26, 341–358. [Google Scholar] [CrossRef]
- Fisette, T.; Rollin, P.; Aly, Z.; Campbell, L.; Daneshfar, B.; Filyer, P.; Smith, A.; Davidson, A.; Shang, J.; Jarvis, I. AAFC Annual Crop Inventory. In 2013 Second International Conference on Agro-Geoinformatics (Agro-Geoinformatics); IEEE: New York, NY, USA, 2013; pp. 270–274. [Google Scholar]
- Matikainen, L.; Karila, K.; Litkey, P.; Ahokas, E.; Munck, A.; Karjalainen, M.; Hyyppä, J. The challenge of automated change detection: Developing a method for the updating of land parcels. ISPRS Ann. Photogramm. Remote Sens. Spatial Inf. Sci. 2012, I-4, 239–244. [Google Scholar] [CrossRef] [Green Version]
- Xu, L.; Ming, D.; Zhou, W.; Bao, H.; Chen, Y.; Ling, X. Farmland Extraction from High Spatial Resolution Remote Sensing Images Based on Stratified Scale Pre-Estimation. Remote Sens. 2019, 11, 108. [Google Scholar] [CrossRef] [Green Version]
- Strothmann, W.; Ruckelshausen, A.; Hertzberg, J.; Scholz, C.; Langsenkamp, F. Plant Classification with In-Field-Labeling for Crop/Weed Discrimination Using Spectral Features and 3D Surface Features from a Multi-Wavelength Laser Line Profile System. Comput. Electron. Agric. 2017, 134, 79–93. [Google Scholar] [CrossRef]
- Rufin, P.; Frantz, D.; Ernst, S.; Rabe, A.; Griffiths, P.; özdoğan, M.; Hostert, P. Mapping Cropping Practices on a National Scale Using Intra-Annual Landsat Time Series Binning. Remote Sens. 2019, 11, 232. [Google Scholar] [CrossRef] [Green Version]
- Mathur, A.; Foody, G.M. Crop Classification by Support Vector Machine with Intelligently Selected Training Data for an Operational Application. Int. J. Remote Sens. 2008, 29, 2227–2240. [Google Scholar] [CrossRef] [Green Version]
- Yang, C.; Everitt, J.H.; Murden, D. Evaluating High Resolution SPOT 5 Satellite Imagery for Crop Identification. Comput. Electron. Agric. 2011, 75, 347–354. [Google Scholar] [CrossRef]
- Hu, Q.; Wu, W.-b.; Song, Q.; Lu, M.; Chen, D.; Yu, Q.-y.; Tang, H.-j. How Do Temporal and Spectral Features Matter in Crop Classification in Heilongjiang Province, China? J. Integr. Agric. 2017, 16, 324–336. [Google Scholar] [CrossRef]
- Zhang, J.; Feng, L.; Yao, F. Improved Maize Cultivated Area Estimation over a Large Scale Combining MODIS-EVI Time Series Data and Crop Phenological Information. ISPRS J. Photogramm. Remote Sens. 2014, 94, 102–113. [Google Scholar] [CrossRef]
- Blickensdörfer, L.; Schwieder, M.; Pflugmacher, D.; Nendel, C.; Erasmi, S.; Hostert, P. Mapping of Crop Types and Crop Sequences with Combined Time Series of Sentinel-1, Sentinel-2 and Landsat 8 Data for Germany. Remote Sens. Environ. 2022, 269, 112831. [Google Scholar] [CrossRef]
- Preidl, S.; Lange, M.; Doktor, D. Introducing APiC for Regionalised Land Cover Mapping on the National Scale Using Sentinel-2A Imagery. Remote Sens. Environ. 2020, 240, 111673. [Google Scholar] [CrossRef]
- Zhong, L.; Hu, L.; Zhou, H. Deep Learning Based Multi-Temporal Crop Classification. Remote Sens. Environ. 2019, 221, 430–443. [Google Scholar] [CrossRef]
- Vuolo, F.; Neuwirth, M.; Immitzer, M.; Atzberger, C.; Ng, W.T. How Much Does Multi-Temporal Sentinel-2 Data Improve Crop Type Classification? Int. J. Appl. Earth Obs. Geoinf. 2018, 72, 122–130. [Google Scholar] [CrossRef]
- Ji, S.; Zhang, Z.; Zhang, C.; Wei, S.; Lu, M.; Duan, Y. Learning Discriminative Spatiotemporal Features for Precise Crop Classification from Multi-Temporal Satellite Images. Int. J. Remote Sens. 2020, 41, 3162–3174. [Google Scholar] [CrossRef]
- Yuan, Q.; Shen, H.; Li, T.; Li, Z.; Li, S.; Jiang, Y.; Xu, H.; Tan, W.; Yang, Q.; Wang, J.; et al. Deep Learning in Environmental Remote Sensing: Achievements and Challenges. Remote Sens. Environ. 2020, 241, 111716. [Google Scholar] [CrossRef]
- Luo, C.; Meng, S.; Hu, X.; Wang, X.; Zhong, Y. Cropnet: Deep Spatial-Temporal-Spectral Feature Learning Network for Crop Classification from Time-Series Multi-Spectral Images. In Proceedings of the International Geoscience and Remote Sensing Symposium (IGARSS), Virtual, 26 September–2 October 2020. [Google Scholar]
- Xu, J.; Zhu, Y.; Zhong, R.; Lin, Z.; Xu, J.; Jiang, H.; Huang, J.; Li, H.; Lin, T. DeepCropMapping: A Multi-Temporal Deep Learning Approach with Improved Spatial Generalizability for Dynamic Corn and Soybean Mapping. Remote Sens. Environ. 2020, 247, 111946. [Google Scholar] [CrossRef]
- Chamorro Martinez, J.A.; Cué La Rosa, L.E.; Feitosa, R.Q.; Sanches, I.D.A.; Happ, P.N. Fully Convolutional Recurrent Networks for Multidate Crop Recognition from Multitemporal Image Sequences. ISPRS J. Photogramm. Remote Sens. 2021, 171, 188–201. [Google Scholar] [CrossRef]
- Vaswani, A.; Shazeer, N.; Parmar, N.; Uszkoreit, J.; Jones, L.; Gomez, A.N.; Kaiser, Ł.; Polosukhin, I. Attention Is All You Need. In Proceedings of the Advances in Neural Information Processing Systems, Long Beach, CA, USA, 4–9 December 2017; Volume 2017. [Google Scholar]
- Xu, J.; Yang, J.; Xiong, X.; Li, H.; Huang, J.; Ting, K.C.; Ying, Y.; Lin, T. Towards Interpreting Multi-Temporal Deep Learning Models in Crop Mapping. Remote Sens. Environ. 2021, 264, 112599. [Google Scholar] [CrossRef]
- Rußwurm, M.; Körner, M. Self-Attention for Raw Optical Satellite Time Series Classification. ISPRS J. Photogramm. Remote Sens. 2020, 169, 421–435. [Google Scholar] [CrossRef]
- Rußwurm, M.; Körner, M. Convolutional LSTMs for Cloud-Robust Segmentation of Remote Sensing Imagery. In Proceedings of the 32nd Conference on Neural Information Processing Systems, Montreal, QC, Canada, 3–8 December 2018; pp. 1–8. [Google Scholar]
- Rußwurm, M.; Körner, M. Multi-Temporal Land Cover Classification with Sequential Recurrent Encoders. ISPRS Int. J. Geoinf. 2018, 7, 129. [Google Scholar] [CrossRef] [Green Version]
- Ren, J.; Wang, R.; Liu, G.; Wang, Y.; Wu, W. An Svm-Based Nested Sliding Window Approach for Spectral–Spatial Classification of Hyperspectral Images. Remote Sens. 2021, 13, 114. [Google Scholar] [CrossRef]
- Liu, R.; Lehman, J.; Molino, P.; Such, F.P.; Frank, E.; Sergeev, A.; Yosinski, J. An Intriguing Failing of Convolutional Neural Networks and the CoordConv Solution. In Proceedings of the Advances in Neural Information Processing Systems, Montreal, QC, Canada, 3–8 December 2018; Volume 2018. [Google Scholar]
- Woo, S.; Park, J.; Lee, J.Y.; Kweon, I.S. CBAM: Convolutional Block Attention Module. In Proceedings of the Computer Vision–ECCV 2018, Munich, Germany, 8–14 September 2018; Volume 11211. [Google Scholar]
- Wang, Y.; Zhang, Z.; Feng, L.; Ma, Y.; Du, Q. A New Attention-Based CNN Approach for Crop Mapping Using Time Series Sentinel-2 Images. Comput. Electron. Agric. 2021, 184, 106090. [Google Scholar] [CrossRef]
- Zhong, L.; Gong, P.; Biging, G.S. Efficient Corn and Soybean Mapping with Temporal Extendability: A Multi-Year Experiment Using Landsat Imagery. Remote Sens. Environ. 2014, 140, 1–13. [Google Scholar] [CrossRef]
- Zhou, Y.; Xiao, X.; Qin, Y.; Dong, J.; Zhang, G.; Kou, W.; Jin, C.; Wang, J.; Li, X. Mapping Paddy Rice Planting Area in Rice-Wetland Coexistent Areas through Analysis of Landsat 8 OLI and MODIS Images. Int. J. Appl. Earth Obs. Geoinf. 2016, 46, 1–12. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Breiman, L. Random Forests. Mach. Learn. 2001, 45, 5–32. [Google Scholar] [CrossRef] [Green Version]
- Tu, Z.; Talebi, H.; Zhang, H.; Yang, F.; Milanfar, P.; Bovik, A.; Li, Y. MAXIM: Multi-Axis MLP for Image Processing. In Proceedings of the 2022 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), New Orleans, LA, USA, 19–24 June 2022; pp. 5759–5770. [Google Scholar] [CrossRef]
- He, K.; Zhang, X.; Ren, S.; Sun, J. Deep Residual Learning for Image Recognition. In Proceedings of the 2016 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Las Vegas, NV, USA, 27–30 June 2016; Volume 2016, pp. 770–778. [Google Scholar] [CrossRef] [Green Version]
- Nguyen, L.H.; Joshi, D.R.; Clay, D.E.; Henebry, G.M. Characterizing Land Cover/Land Use from Multiple Years of Lansat and MODIS Time Series: A Novel Approach Using Land Surface Phenology Modeling and Random Forest Classifier. Remote Sens. Environ. 2020, 238, 111017. [Google Scholar] [CrossRef]
- Tolstikhin, I.; Houlsby, N.; Kolesnikov, A.; Beyer, L.; Zhai, X.; Unterthiner, T.; Yung, J.; Steiner, A.; Keysers, D.; Uszkoreit, J.; et al. MLP-Mixer: An All-MLP Architecture for Vision. Adv. Neural Inf. Process. Syst. 2021, 29, 24261–24272. [Google Scholar]
- Powers, D.M.W. Evaluation: From Precision, Recall and F-Factor to ROC, Informedness, Markedness & Correlation; School of Informatics and Engineering Flinders University: Adelaide, Australia, 2007. [Google Scholar]
- Sasaki, Y. The Truth of the F-Measure. Teach. Tutor. Mater. 2007, 1–5. Available online: https://www.researchgate.net/publication/268185911 (accessed on 1 September 2022).
- Rahman, M.A.; Wang, Y. Optimizing Intersection-Over-Union in Deep. In Proceedings of the International Symposium on Visual Computing, Las Vegas, NV, USA, 12–14 December 2016; pp. 234–244. [Google Scholar] [CrossRef]
- Cohen, J. A Coefficient of Agreement for Nominal Scales. Educ. Psychol. Meas. 1960, 20, 37–46. [Google Scholar] [CrossRef]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Image | Soybean | Corn | Average | Average | OA | Kappa | ||
|---|---|---|---|---|---|---|---|---|
| F1 | IOU | F1 | IOU | F1 | IOU | |||
| A | 0.8715 | 0.7722 | 0.8555 | 0.7475 | 0.8635 | 0.7599 | 0.9321 | 0.8772 |
| B | 0.9666 | 0.9354 | 0.9653 | 0.9330 | 0.9660 | 0.9342 | 0.9598 | 0.9337 |
| C | 0.9548 | 0.9134 | 0.9550 | 0.9140 | 0.9549 | 0.9137 | 0.9435 | 0.9101 |
| D | 0.9380 | 0.8832 | 0.9386 | 0.8842 | 0.9383 | 0.8837 | 0.9569 | 0.9251 |
| Average | 0.9327 | 0.8761 | 0.9286 | 0.8697 | 0.9307 | 0.8729 | 0.9481 | 0.9115 |
| Model | Soybean | Corn | Average F1 | Average IOU | OA | Kappa | ||
|---|---|---|---|---|---|---|---|---|
| F1 | IOU | F1 | IOU | |||||
| MACN | 0.9327 | 0.8761 | 0.9286 | 0.8697 | 0.9307 | 0.8729 | 0.9481 | 0.9115 |
| Resnet-18 | 0.8922 | 0.8068 | 0.8905 | 0.8040 | 0.8913 | 0.8054 | 0.9162 | 0.8523 |
| MLP | 0.8863 | 0.8005 | 0.8688 | 0.7745 | 0.8775 | 0.7875 | 0.8139 | 0.6714 |
| RFC | 0.8478 | 0.7415 | 0.8489 | 0.7423 | 0.8483 | 0.7419 | 0.7846 | 0.6496 |
| Max. Window Size | Soybean | Corn | Average F1 | Average IOU | OA | Kappa | |||
|---|---|---|---|---|---|---|---|---|---|
| F1 | IOU | F1 | IOU | ||||||
| 1 × 1 | 0.9017 | 0.8239 | 0.8943 | 0.8118 | 0.8980 | 0.8179 | 0.9137 | 0.8555 | |
| 3 × 3 | 0.9252 | 0.8625 | 0.9209 | 0.856 | 0.9231 | 0.8592 | 0.9422 | 0.9017 | |
| 5 × 5 (MACN) | 0.9327 | 0.8761 | 0.9286 | 0.8697 | 0.9307 | 0.8729 | 0.9481 | 0.9115 | |
| 7 × 7 | 0.91 | 0.8389 | 0.9085 | 0.8366 | 0.9093 | 0.8378 | 0.9304 | 0.8825 | |
| 9 × 9 | 0.9169 | 0.849 | 0.9126 | 0.8419 | 0.9148 | 0.8455 | 0.9343 | 0.8882 | |
| Model | Soybean | Corn | Average F1 | Average IOU | OA | Kappa | ||
|---|---|---|---|---|---|---|---|---|
| F1 | IOU | F1 | IOU | |||||
| 1 × 1 + 3 × 3 + 5 × 5 (MACN) | 0.9327 | 0.8761 | 0.9286 | 0.8697 | 0.9307 | 0.8729 | 0.9481 | 0.9115 |
| 3 × 3 + 5 × 5 | 0.9218 | 0.8554 | 0.9171 | 0.8306 | 0.9145 | 0.8430 | 0.9413 | 0.8722 |
| 5 × 5 | 0.9054 | 0.8412 | 0.8963 | 0.8255 | 0.9009 | 0.8334 | 0.9294 | 0.8671 |
| Model | Soybean | Corn | Average F1 | Average IOU | OA | Kappa | ||
|---|---|---|---|---|---|---|---|---|
| F1 | IOU | F1 | IOU | |||||
| MACN | 0.9327 | 0.8761 | 0.9286 | 0.8697 | 0.9307 | 0.8729 | 0.9481 | 0.9115 |
| Missing CoordConv | 0.8992 | 0.8620 | 0.9079 | 0.8585 | 0.9035 | 0.8586 | 0.9031 | 0.8532 |
| Missing CBAM | 0.9033 | 0.8262 | 0.9161 | 0.8455 | 0.9097 | 0.8358 | 0.9085 | 0.8627 |
| Soybean | Corn | Average | Average | OA | Kappa | ||
|---|---|---|---|---|---|---|---|
| F1 | IOU | F1 | IOU | F1 | IOU | ||
| 0.8457 | 0.7327 | 0.8510 | 0.7406 | 0.8483 | 0.7367 | 0.8466 | 0.7646 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wu, Y.; Wu, Y.; Wang, B.; Yang, H. A Remote Sensing Method for Crop Mapping Based on Multiscale Neighborhood Feature Extraction. Remote Sens. 2023, 15, 47. https://doi.org/10.3390/rs15010047
Wu Y, Wu Y, Wang B, Yang H. A Remote Sensing Method for Crop Mapping Based on Multiscale Neighborhood Feature Extraction. Remote Sensing. 2023; 15(1):47. https://doi.org/10.3390/rs15010047
Chicago/Turabian StyleWu, Yongchuang, Yanlan Wu, Biao Wang, and Hui Yang. 2023. "A Remote Sensing Method for Crop Mapping Based on Multiscale Neighborhood Feature Extraction" Remote Sensing 15, no. 1: 47. https://doi.org/10.3390/rs15010047
APA StyleWu, Y., Wu, Y., Wang, B., & Yang, H. (2023). A Remote Sensing Method for Crop Mapping Based on Multiscale Neighborhood Feature Extraction. Remote Sensing, 15(1), 47. https://doi.org/10.3390/rs15010047