
BDS/GPS/Galileo Precise Point Positioning Performance Analysis of Android Smartphones Based on Real-Time Stream Data


Abstract
:1. Introduction
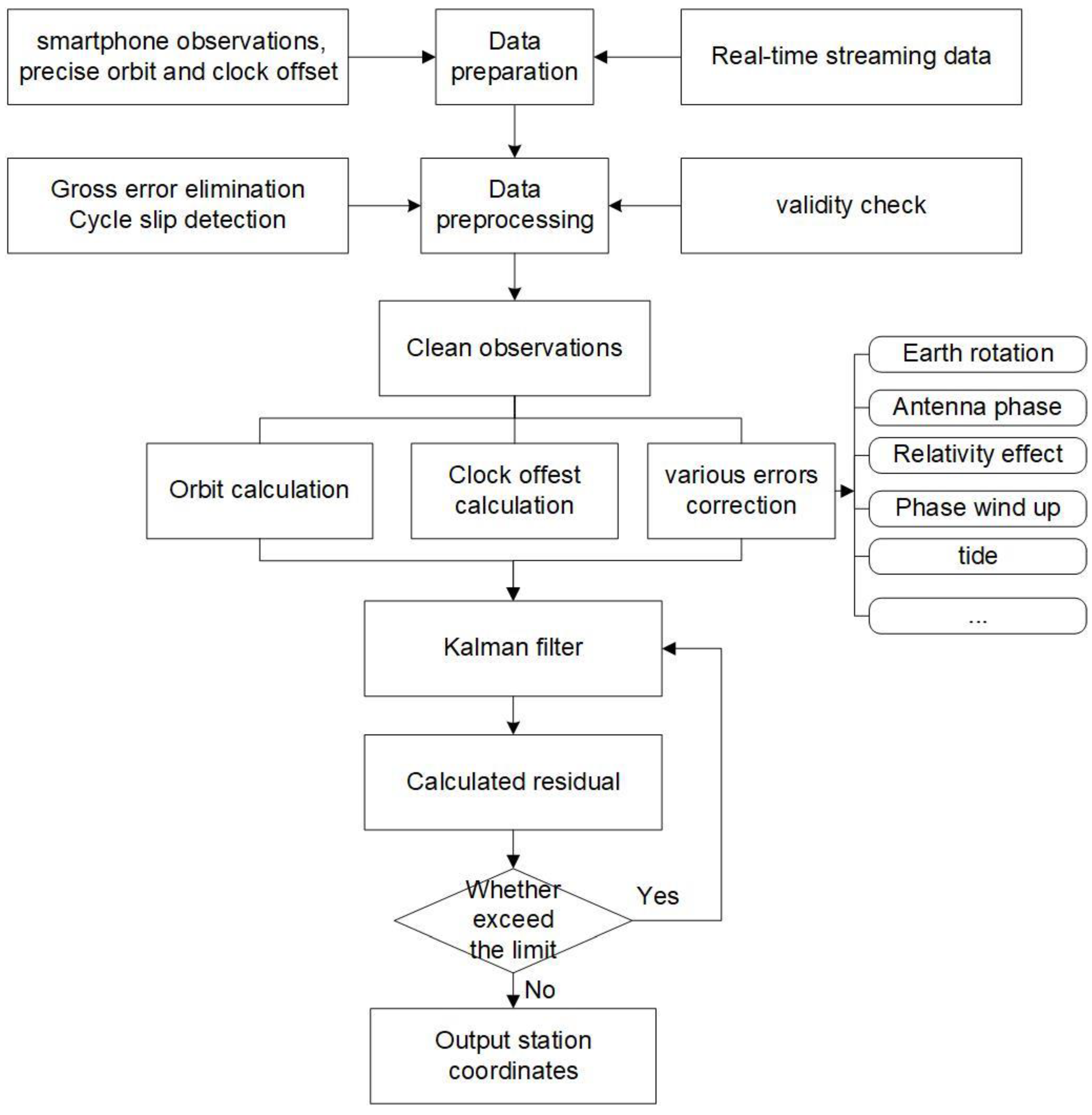
2. Methodology of Real-Time PPP for the Smartphone
3. Data Collection and Observation Quality Assessment
3.1. Carrier-to-Noise Density Ratio
3.2. The Number of Satellites and PDOP
4. Real-Time Orbit and Clock Offset Performance
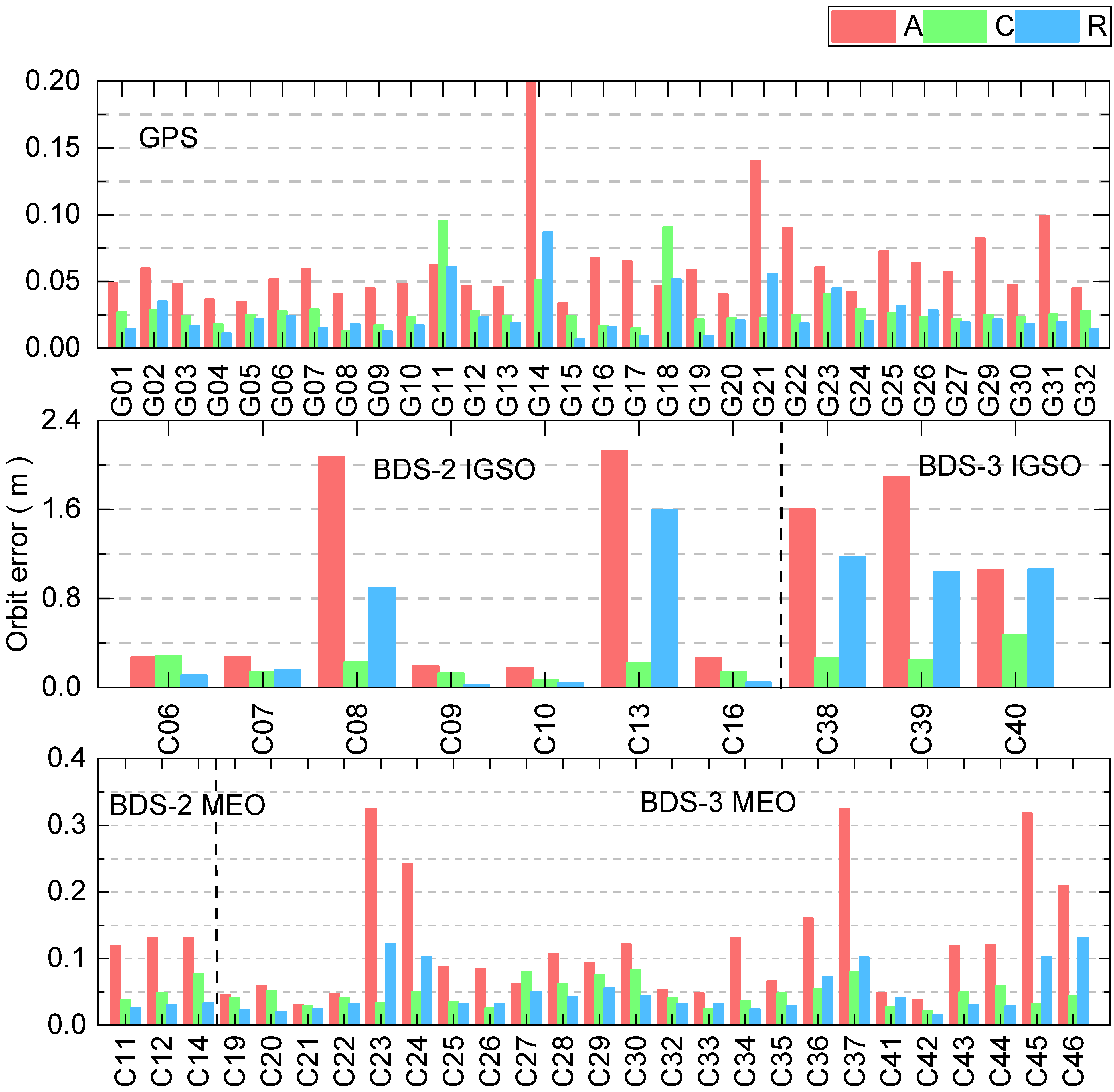
4.1. Real-Time Orbit Performance
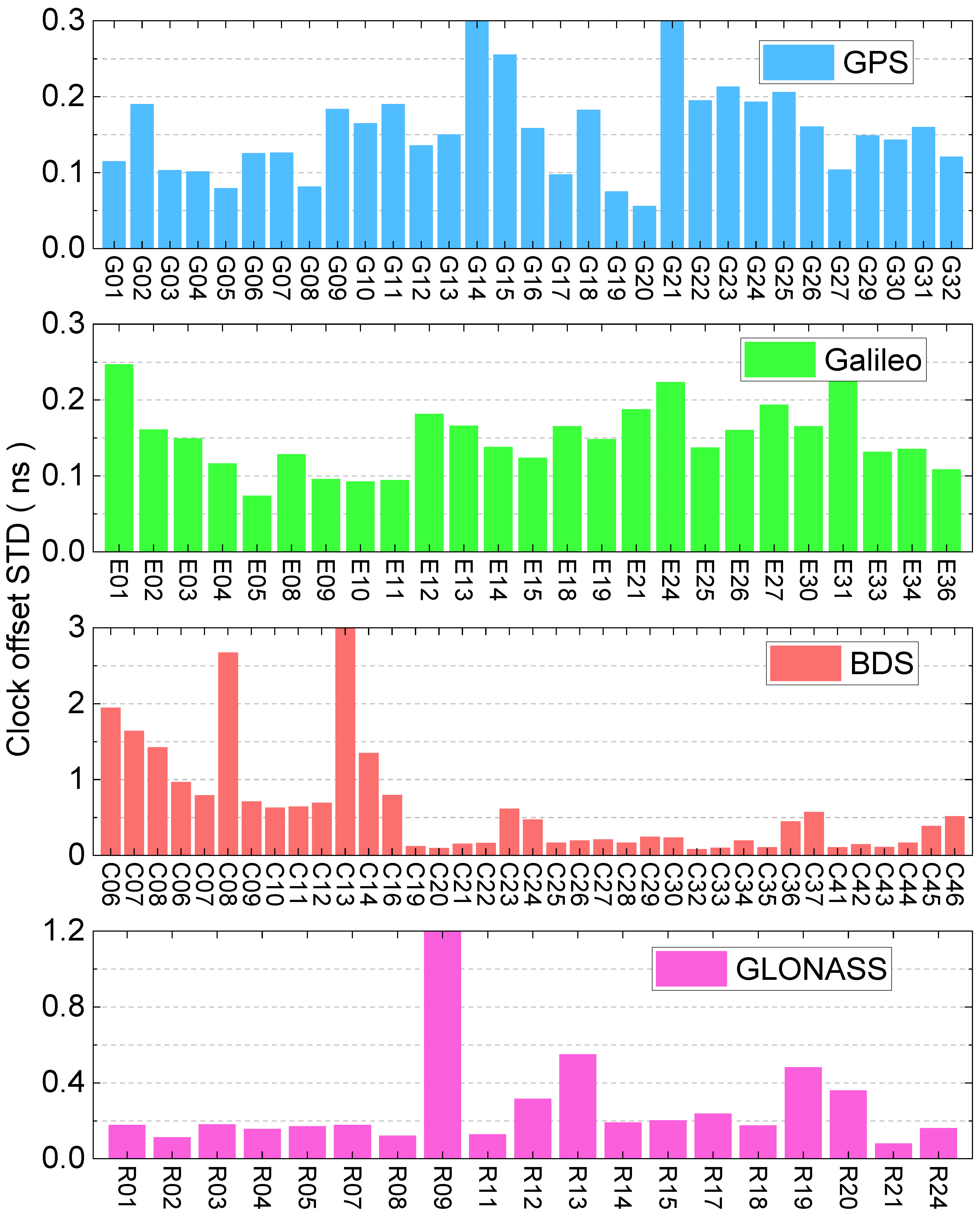
4.2. Real-Time Clock Offset Performance
5. Real-Time PPP Performance of Smartphone
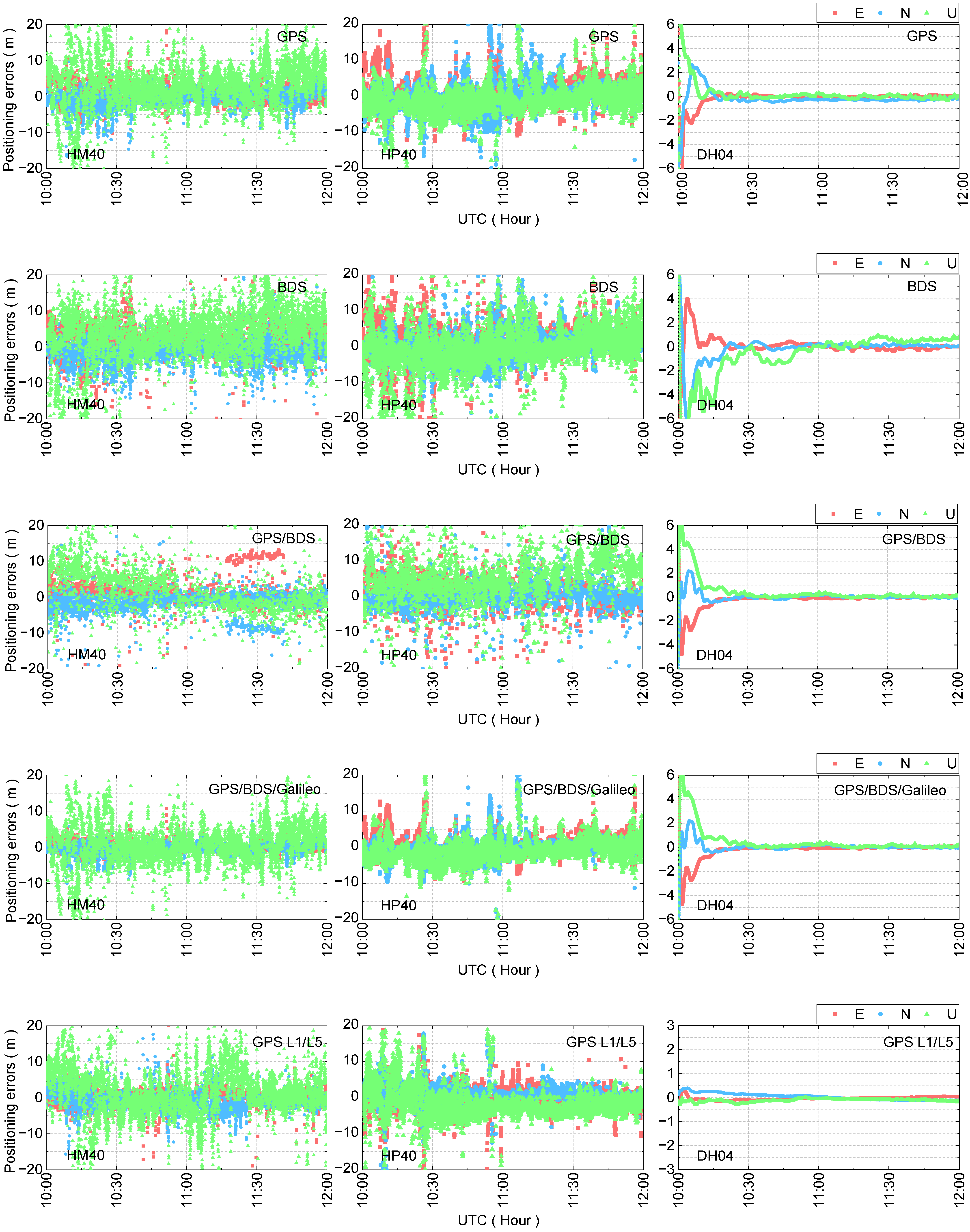
5.1. Static PPP Performance
5.2. Kinematic PPP Performance
6. Conclusions
- (1)
- The positive correlation between C/N0 and elevation is not found, the C/N0 of some observations is low at a higher elevation, and the degree of dispersion for smartphone C/N0 is larger than that of geodetic receivers. The C/N0 of GPS is the best, with an average value of 35 dB-Hz; the results of BDS and GLONASS are the second, with an average of 33 dB-Hz; the result of Galileo is the worst, with an average of 30 dB-Hz.
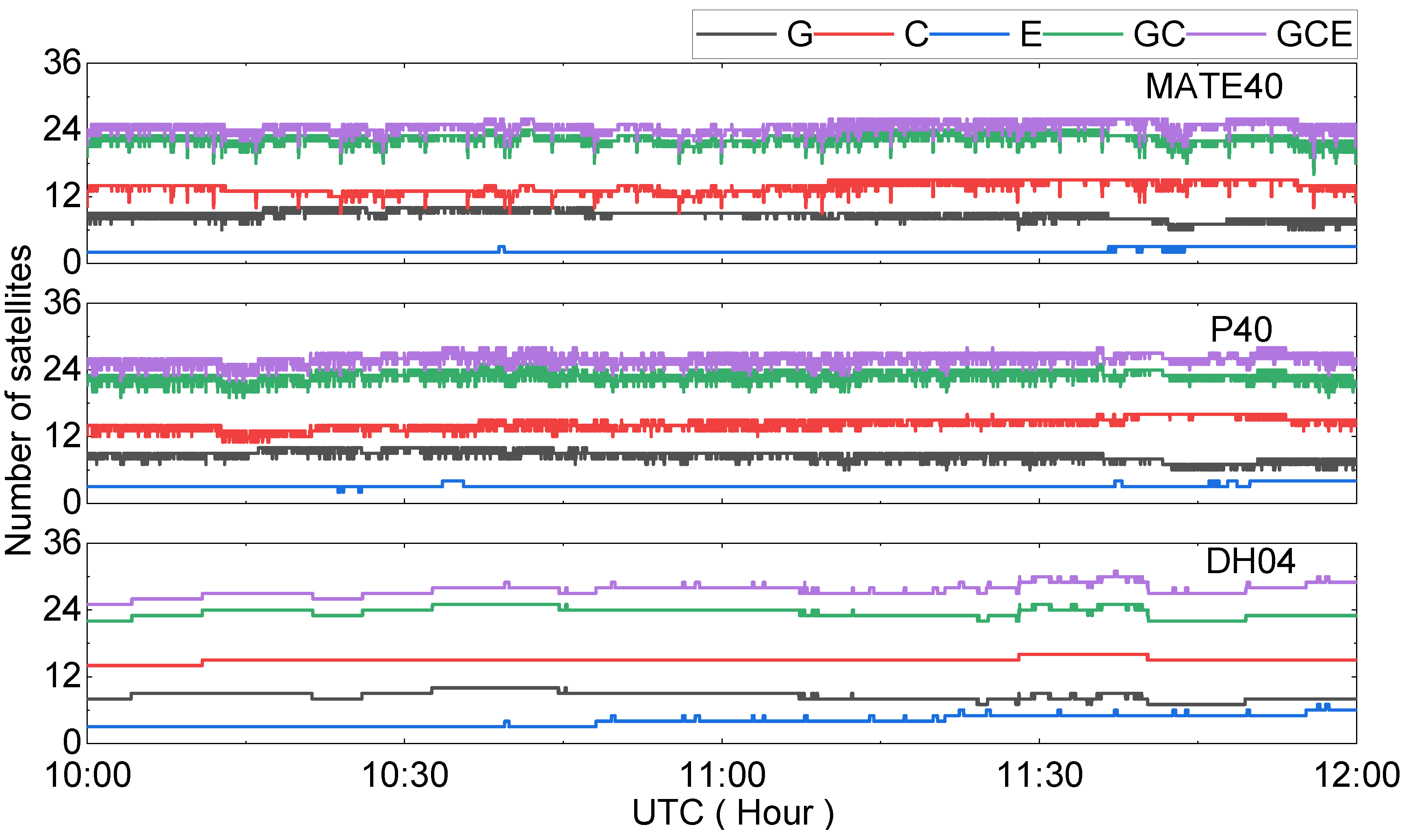
- (2)
- The total number of satellites that can be observed by Huawei Mate40 and P40 is around 30. The number of tracked BDS satellites of the smartphone is larger than that of the GPS, while the GLONASS and Galileo system is relatively small. The PDOP of the Huawei P40 is slightly better than that of the Mate40, the smartphone PDOP of GPS shows the worst, while the average PDOP of BDS, GPS/BDS, GPS/BDS/GLONASS and GPS/BDS/GLONASS/Galileo combinations is less than 1.8.
- (3)
- In terms of real-time orbit accuracy: the accuracy of most GPS and Galileo satellites is better than 0.05 m and 0.1 m in along, cross and radial directions, respectively. Different GLONASS satellites have smaller differences in along and cross directions, but the accuracy in the radial direction is larger. In terms of real-time clock offset accuracy: the clock offset accuracy of GPS and Galileo satellites is better than 0.15 and 0.25 ns, respectively. Compared with BDS-2, the clock offset accuracy of the BDS-3 satellite has been significantly improved, and is better than 0.28 ns, while the clock offset accuracy of the GLONASS satellite is better than 0.8 ns.
- (4)
- In terms of real-time static PPP, the smartphone can achieve decimeter-level PPP accuracy after convergence. The GPS/BDS/Galileo combination of Huawei P40 shows the best PPP accuracy in three components, with RMS of 0.09, 0.27 and 0.12 m in the east, north and up components, respectively. Moreover, in terms of real-time kinematic PPP, there is a large difference between the PPP accuracy of smartphones and receivers, and kinematic, real-time PPP can achieve meter-level positioning accuracy. The GPS/BDS/Galileo combination of Huawei P40 presented the best PPP accuracy, with 3.88, 3.39 and 7.83 m in the E, N and U components, respectively.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Zangenehnejad, F.; Gao, Y. GNSS smartphones positioning: Advances, challenges, opportunities, and future perspectives. Satell. Navig. 2021, 2, 24. [Google Scholar] [CrossRef]
- Paziewski, J.; Sieradzki, R.; Baryla, R. Signal characterization and assessment of code GNSS positioning with low-power consumption smartphones. GPS Solut. 2019, 23, 98. [Google Scholar] [CrossRef] [Green Version]
- Geng, J.; Jiang, E.; Li, G.; Xin, S.; Wei, N. An Improved Hatch Filter Algorithm towards Sub-Meter Positioning Using only Android Raw GNSS Measurements without External Augmentation Corrections. Remote Sens. 2019, 11, 1679. [Google Scholar] [CrossRef] [Green Version]
- Fortunato, M.; Critchley-Marrows, J.; Siutkowska, M.; Ivanovici, M.L.; Benedetti, E.; Roberts, W. Enabling High Accuracy Dynamic Applications in Urban Environments Using PPP and RTK on Android Multi-Frequency and Multi-GNSS Smartphones. In Proceedings of the 2019 European Navigation Conference (ENC), Warsaw, Poland, 1 April 2019; pp. 1–9. [Google Scholar]
- Wu, Q.; Sun, M.; Zhou, C.; Zhang, P. Precise Point Positioning Using Dual-Frequency GNSS Observations on Smartphone. Sensors 2019, 19, 2189. [Google Scholar] [CrossRef] [Green Version]
- Zhang, X.; Tao, X.; Zhu, F.; Shi, X.; Wang, F. Quality assessment of GNSS observations from an Android N smartphone and positioning performance analysis using time-differenced filtering approach. GPS Solut. 2018, 22, 70. [Google Scholar] [CrossRef]
- Liu, W.; Shi, X.; Zhu, F.; Wang, F.; Yu, S. Quality Analysis of Raw GNSS Observation of Google Nexus 9 Smart Tablet Terminal. Geo. Inf. Sci. Wuhan Univ. 2019, 44, 1749–1756. [Google Scholar]
- Paziewski, J.; Fortunato, M.; Mazzoni, A.; Odolinski, R. An analysis of multi-GNSS observations tracked by recent Android smartphones and smartphone-only relative positioning results. Measurement 2021, 175, 109162. [Google Scholar] [CrossRef]
- Zhu, H.; Xia, L.; Wu, D.; Xia, J.; Li, Q. Study on Multi-GNSS Precise Point Positioning Performance with Adverse Effects of Satellite Signals on Android Smartphone. Sensors 2020, 20, 6447. [Google Scholar] [CrossRef] [PubMed]
- Wang, L.; Li, Z.; Wang, N.; Wang, Z. Real-time GNSS precise point positioning for low-cost smart devices. GPS Solut. 2021, 25, 69. [Google Scholar] [CrossRef]
- Robustelli, U.; Baiocchi, V.; Pugliano, G. Assessment of Dual Frequency GNSS Observations from a Xiaomi Mi 8 Android Smartphone and Positioning Performance Analysis. Electronics 2019, 8, 91. [Google Scholar] [CrossRef] [Green Version]
- Guo, F.; Wu, W.; Zhang, X.; Liu, W. Realization and Precision Analysis of Real-Time Precise Point Positioning with Android Smartphones. Geo. Inf. Sci. Wuhan Univ. 2021, 46, 1053–1062. [Google Scholar]
- Wanninger, L.; Heßelbarth, A. GNSS code and carrier phase observations of a Huawei P30 smartphone: Quality assessment and centimeter-accurate positioning. GPS Solut. 2020, 24, 64. [Google Scholar] [CrossRef] [Green Version]
- Chen, B.; Gao, C.; Liu, Y.; Sun, P. Real-time Precise Point Positioning with a Xiaomi MI 8 Android Smartphone. Sensors 2019, 19, 2835. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Bahadur, B. A study on the real-time code-based GNSS positioning with Android smartphones. Measurement 2022, 194, 111078. [Google Scholar] [CrossRef]
- Li, Z.; Wang, L.; Wang, N.; Li, L. Real-time GNSS precise point positioning with smartphones for vehicle navigation. Satell. Navig. 2022, 3, 19. [Google Scholar] [CrossRef]
- Li, M.; Lei, Z.; Li, W.; Jiang, K.; Huang, T.; Zheng, J.; Zhao, Q. Performance Evaluation of Single-Frequency Precise Point Positioning and Its Use in the Android Smartphone. Remote Sens. 2021, 13, 4894. [Google Scholar] [CrossRef]
- Liu, W.; Shi, X.; Zhu, F.; Tao, X.; Wang, F. Quality analysis of multi-GNSS raw observations and a velocity-aided positioning approach based on smartphones. Adv. Space Res. 2019, 63, 2358–2377. [Google Scholar] [CrossRef]
- Realini, E.; Caldera, S.; Pertusini, L.; Sampietro, D. Precise GNSS Positioning Using Smart Devices. Sensors 2017, 17, 2434. [Google Scholar] [CrossRef] [Green Version]
- Zhang, K.; Jiao, W.; Li, J. Analysis of GNSS Positioning Precision on Android Smart Devices. Geo. Inf. Sci. Wuhan Univ. 2019, 44, 1472–1477. [Google Scholar]
- Van Bree, R.J.P.; Tiberius, C.J.M. Real-time single-frequency precise point positioning: Accuracy assessment. GPS Solut. 2012, 16, 259–266. [Google Scholar] [CrossRef] [Green Version]
- Zhang, P.; Tu, R.; Han, J.; Gao, Y.; Zhang, R.; Lu, X. Characterization of biases between BDS-3 and BDS-2, GPS, Galileo and GLONASS observations and their effect on precise time and frequency transfer. Meas. Sci Technol. 2021, 32, 035006. [Google Scholar] [CrossRef]
- Zhang, P.; Tu, R.; Tao, L.; Wang, B.; Gao, Y.; Lu, X. Preliminary Analysis of Intersystem Biases in BDS-2/BDS-3 Precise Time and Frequency Transfer. Remote Sens. 2022, 14, 4594. [Google Scholar] [CrossRef]
- Zhang, P.; Tu, R.; Gao, Y.; Zhang, R.; Han, J. Performance of Galileo precise time and frequency transfer models using quad-frequency carrier phase observations. GPS Solut. 2020, 24, 40. [Google Scholar] [CrossRef]
- Tu, R.; Zhang, P.; Zhang, R.; Liu, J.; Lu, X. Modeling and performance analysis of precise time transfer based on BDS triple-frequency un-combined observations. J. Geod. 2019, 93, 837–847. [Google Scholar] [CrossRef]
- Elsobeiey, M.; Al-Harbi, S. Performance of real-time Precise Point Positioning using IGS real-time service. GPS Solut. 2016, 20, 565–571. [Google Scholar] [CrossRef]
- Saastamoinen, J. Contributions to the theory of atmospheric refraction—Part II. Refraction corrections in satellite geodesy. Bull. Géod. 1973, 47, 13–34. [Google Scholar] [CrossRef]
- Zhou, F.; Cao, X.; Ge, Y.; Li, W. Assessment of the positioning performance and tropospheric delay retrieval with precise point positioning using products from different analysis centers. GPS Solut. 2020, 24, 12. [Google Scholar] [CrossRef]
- Kiliszek, D.; Kroszczyński, K.; Araszkiewicz, A. Analysis of Different Weighting Functions of Observations for GPS and Galileo Precise Point Positioning Performance. Remote Sens. 2022, 14, 2223. [Google Scholar] [CrossRef]
- Li, M.; Huang, G.; Wang, L.; Xie, W.; Yue, F. Performance of Multi-GNSS in the Asia-Pacific Region: Signal Quality, Broadcast Ephemeris and Precise Point Positioning (PPP). Remote Sens. 2022, 14, 3028. [Google Scholar] [CrossRef]
- Yang, Y.; Xu, Y.; Li, J.; Yang, C. Progress and performance evaluation of BeiDou global navigation satellite system: Data analysis based on BDS-3 demonstration. Sci. China Earth Sci. 2018, 61, 614–624. [Google Scholar] [CrossRef]
- Zhang, L.; Yang, H.; Gao, Y.; Yao, Y.; Xu, C. Evaluation and analysis of real-time precise orbits and clocks products from different IGS analysis centers. Adv. Space Res. 2018, 61, 2942–2954. [Google Scholar] [CrossRef]
- Huang, G.; Yan, X.; Zhang, Q.; Liu, C.; Wang, L.; Qin, Z. Estimation of antenna phase center offset for BDS IGSO and MEO satellites. GPS Solut. 2018, 22, 49. [Google Scholar] [CrossRef]
- Huang, G.; Cui, B.; Zhang, Q.; Fu, W.; Li, P. An improved predicted model for BDS ultra-rapid satellite clock offsets. Remote Sens. 2018, 10, 60. [Google Scholar] [CrossRef] [Green Version]
- Li, B.; Ge, H.; Bu, Y.; Zheng, Y.; Yuan, L. Comprehensive assessment of real-time precise products from IGS analysis centers. Satell. Navig. 2022, 3, 12. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Items | Strategy/Model | |
|---|---|---|
| Observations | Processing models | Single frequency: GPS: L1; BDS: B1I; Galileo: E5a |
| Dual frequency: GPS: L1/L5 | ||
| Sampling interval | 1s | |
| Cut-off angle | 15° | |
| Correction | Tropospheric delay | Saastamoinen model and GMF function |
| Satellite hardware delay | CODE products | |
| Satellite PCO and PCV | igs14.atx | |
| Satellite orbit/clock deviation | GFZ real-time product | |
| Phase windup | Model correction | |
| Relativistic effect | Model correction | |
| Earth rotation | Model correction | |
| Station coordinates | Static: constant; Kinematic: white noise | |
| Parameter estimation | Tropospheric delay | Random walk |
| Receiver clock offset | White noise | |
| ambiguity | Constant (float solution) | |
| Inter-system bias | Random walk |
| Huawei Mate40 | Huawei P40 | |
|---|---|---|
| CPU | Kylin 9000E | Kylin 9905G |
| frequency | GPS (L1 + L5)/GLONASS (L1C)/BDS (B1I)/Galileo (E1 + E5a) | |
| Release Time | October 2020 | March 2020 |
| Appearance |  |  |
| System | Along | Cross | Radial | 3D RMS |
|---|---|---|---|---|
| GPS | 0.064 | 0.029 | 0.025 | 0.075 |
| BDS-2 MEO | 0.127 | 0.055 | 0.030 | 0.142 |
| BDS-2 IGSO | 0.770 | 0.173 | 0.409 | 0.889 |
| BDS-3 MEO | 0.123 | 0.047 | 0.051 | 0.141 |
| BDS-3 IGSO | 1.513 | 0.329 | 1.091 | 1.895 |
| GLONASS | 0.132 | 0.036 | 0.042 | 0.143 |
| Galileo | 0.067 | 0.031 | 0.034 | 0.081 |
| GPS | Galileo | BDS-2 | BDS-3 | GLONASS | |
|---|---|---|---|---|---|
| clock offset STD | 0.158 | 0.163 | 0.553 | 0.280 | 0.317 |
| System | Mate40 (m) | P40 (m) | DH04 (m) | ||||||
|---|---|---|---|---|---|---|---|---|---|
| East | North | Up | East | North | Up | East | North | Up | |
| G | 0.75 | 0.64 | 1.33 | 0.23 | 0.68 | 1.39 | 0.29 | 0.56 | 0.88 |
| C | 0.37 | 0.39 | 0.23 | 0.49 | 0.60 | 0.67 | 0.24 | 0.39 | 0.58 |
| GC | 0.13 | 0.15 | 0.21 | 0.28 | 0.28 | 0.30 | 0.24 | 0.36 | 0.55 |
| GCE | 0.08 | 0.13 | 0.20 | 0.09 | 0.27 | 0.12 | 0.23 | 0.33 | 0.54 |
| G (L1/L5) | 0.07 | 0.13 | 1.13 | 0.19 | 0.61 | 1.03 | 0.24 | 0.52 | 0.80 |
| System | Mate40 (m) | P40 (m) | DH04 (m) | ||||||
|---|---|---|---|---|---|---|---|---|---|
| East | North | Up | East | North | Up | East | North | Up | |
| G | 6.89 | 7.36 | 8.51 | 5.54 | 5.94 | 9.00 | 0.63 | 0.57 | 0.72 |
| C | 4.22 | 3.34 | 9.96 | 4.57 | 3.73 | 8.89 | 0.67 | 0.86 | 1.47 |
| GC | 3.47 | 4.30 | 8.57 | 4.20 | 3.49 | 8.07 | 0.58 | 0.40 | 0.89 |
| GCE | 3.45 | 4.41 | 8.60 | 3.88 | 3.39 | 7.83 | 0.47 | 0.53 | 0.84 |
| G (L1/L5) | 6.85 | 7.30 | 8.15 | 5.30 | 5.82 | 8.80 | 0.06 | 0.11 | 0.16 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, M.; Huang, G.; Wang, L.; Xie, W. BDS/GPS/Galileo Precise Point Positioning Performance Analysis of Android Smartphones Based on Real-Time Stream Data. Remote Sens. 2023, 15, 2983. https://doi.org/10.3390/rs15122983
Li M, Huang G, Wang L, Xie W. BDS/GPS/Galileo Precise Point Positioning Performance Analysis of Android Smartphones Based on Real-Time Stream Data. Remote Sensing. 2023; 15(12):2983. https://doi.org/10.3390/rs15122983
Chicago/Turabian StyleLi, Mengyuan, Guanwen Huang, Le Wang, and Wei Xie. 2023. "BDS/GPS/Galileo Precise Point Positioning Performance Analysis of Android Smartphones Based on Real-Time Stream Data" Remote Sensing 15, no. 12: 2983. https://doi.org/10.3390/rs15122983
APA StyleLi, M., Huang, G., Wang, L., & Xie, W. (2023). BDS/GPS/Galileo Precise Point Positioning Performance Analysis of Android Smartphones Based on Real-Time Stream Data. Remote Sensing, 15(12), 2983. https://doi.org/10.3390/rs15122983