
Radar Echo Reconstruction in Oceanic Area via Deep Learning of Satellite Data

 ,
,
Abstract
:1. Introduction
2. Materials and Methods
2.1. Materials
2.1.1. Himawari-8 Satellite Data
2.1.2. Composite Reflectivity (CREF)
2.1.3. GPM Precipitation Data
2.1.4. Data Preprocessing
Spatial and Temporal Matching
Normalization
2.2. Method
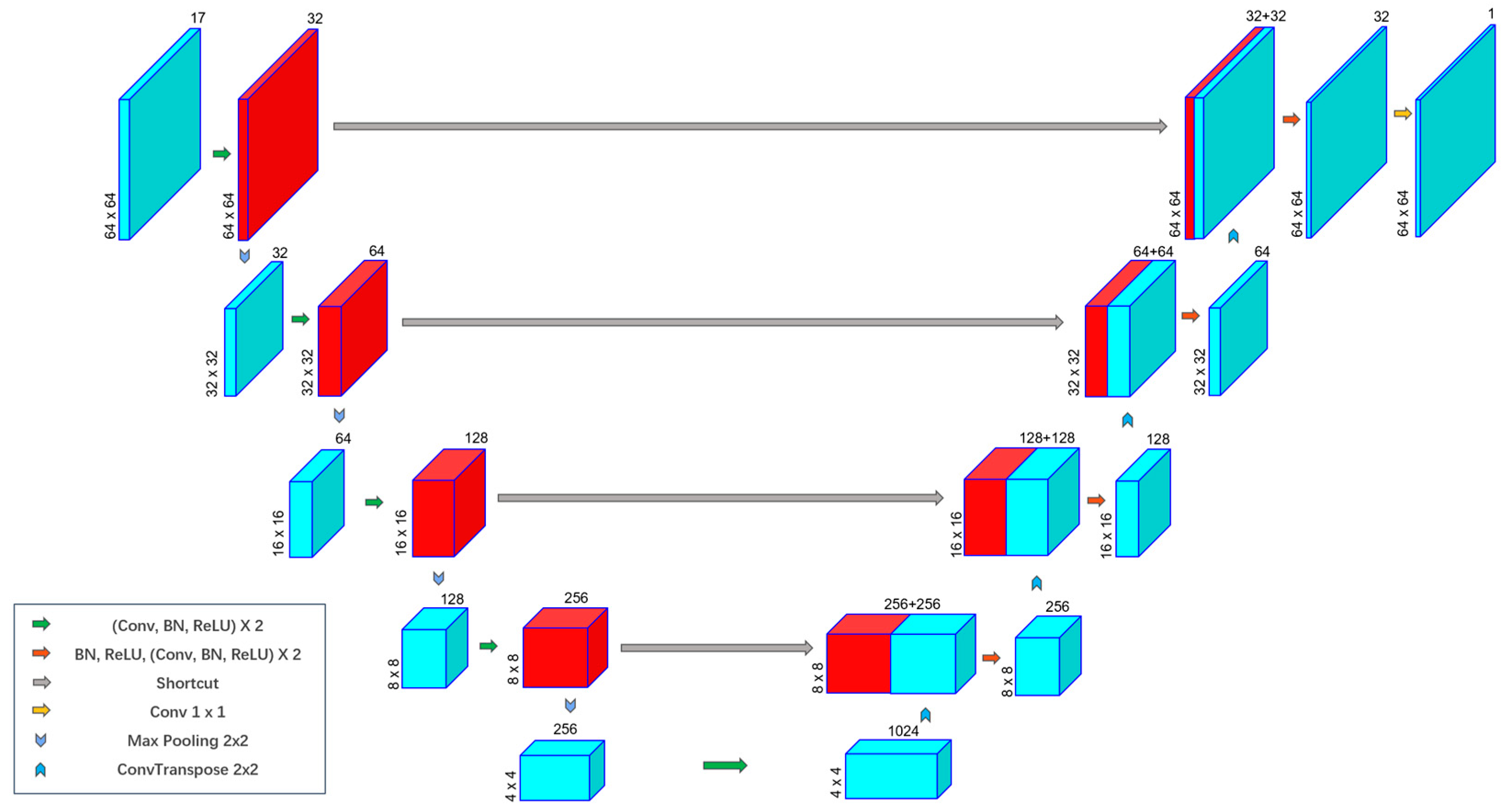
2.2.1. Satellite to Radar U-Net
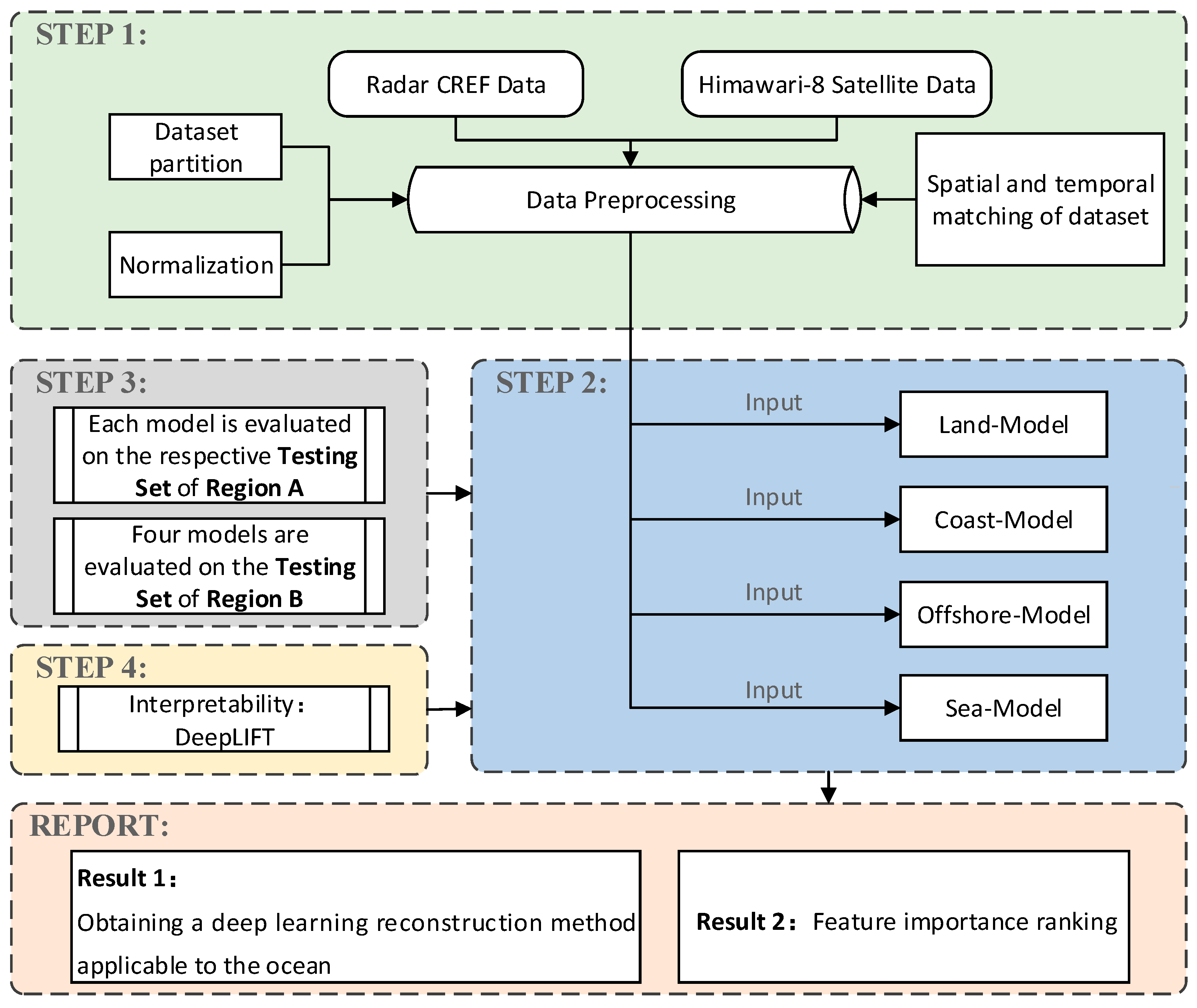
2.2.2. Research Scheme of the CREF Reconstruction
2.2.3. Evaluation Metrics
2.2.4. Interpretability
3. Results
3.1. Performances of the Four STR-UNet Models
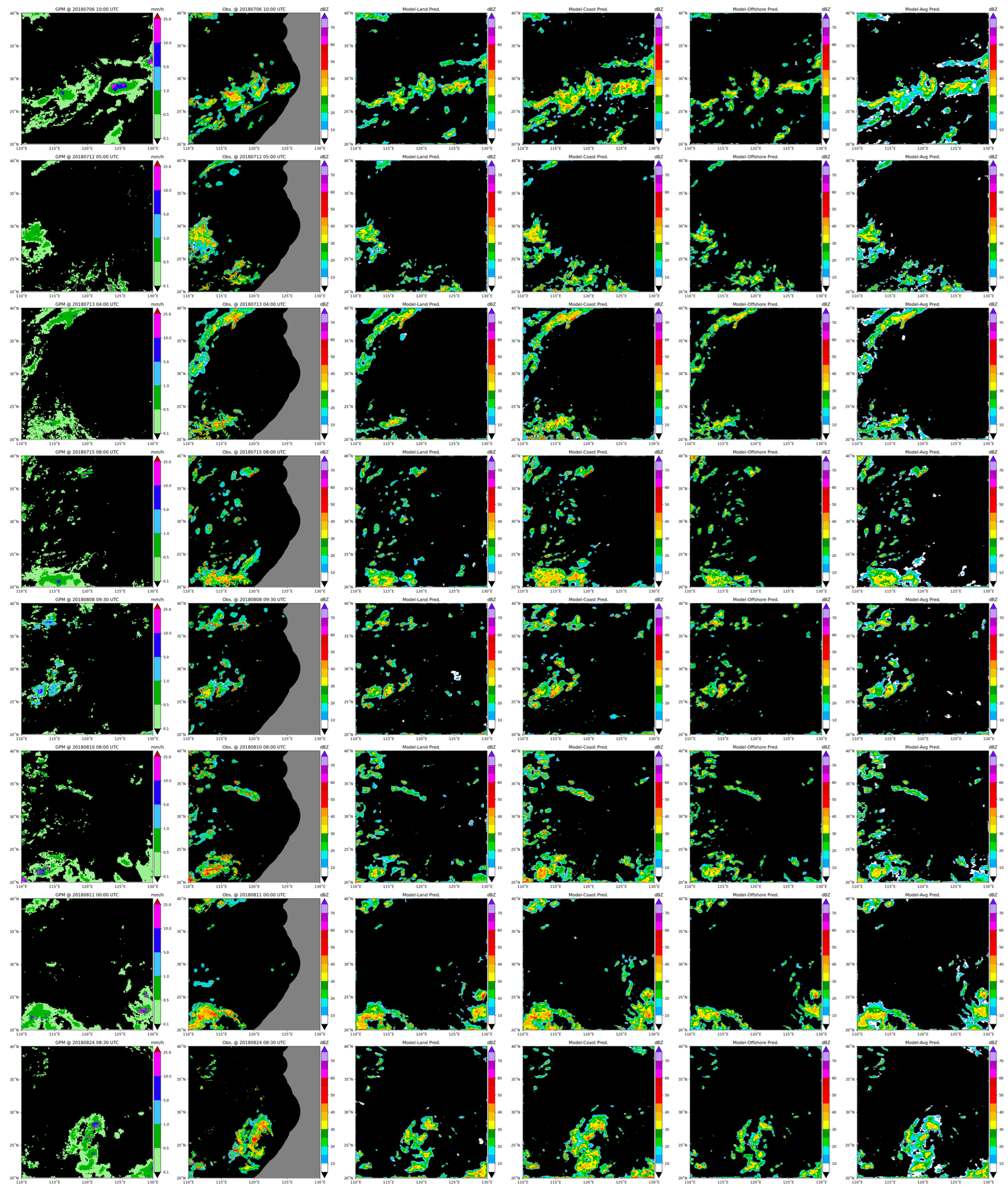
3.2. Case Study
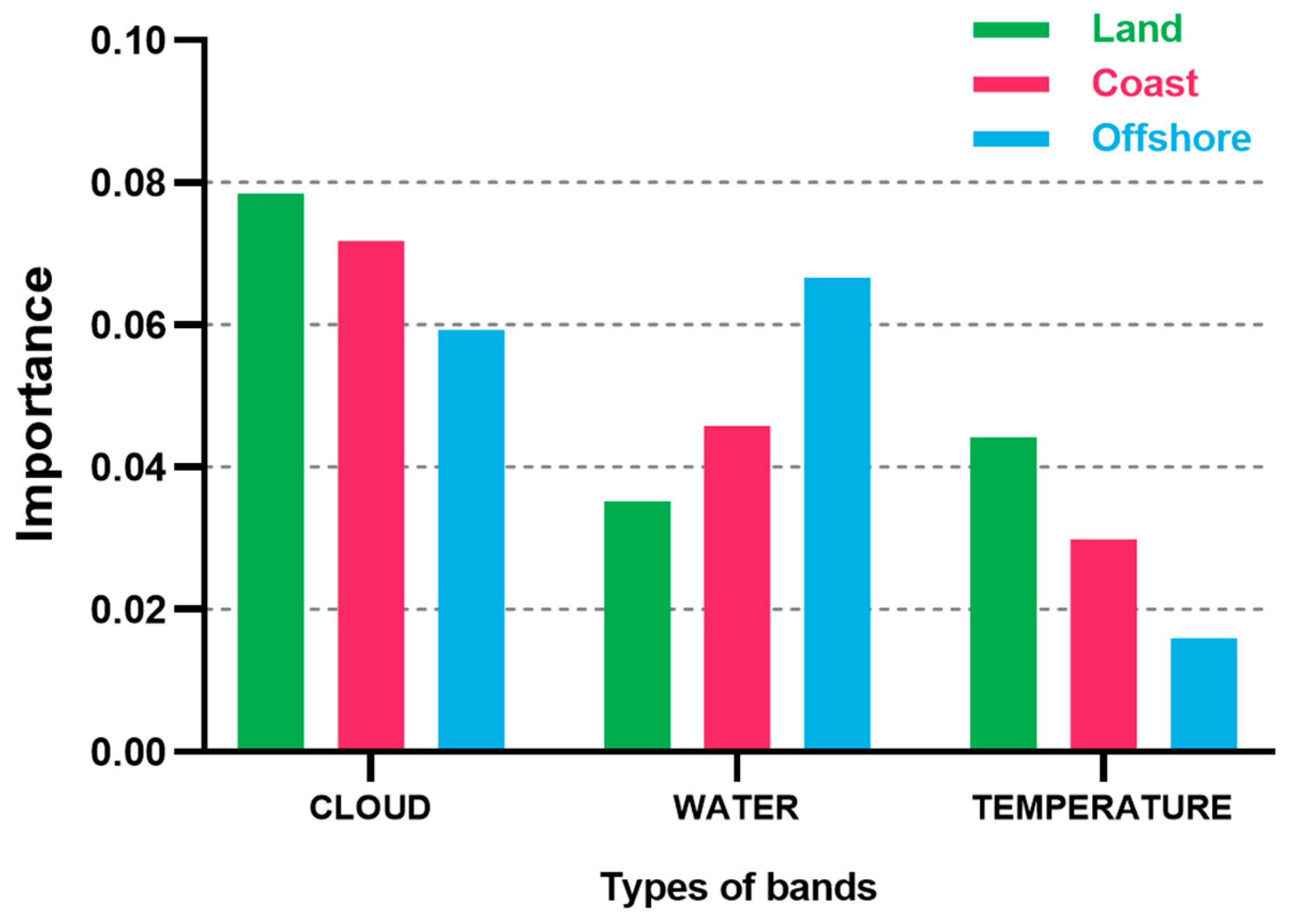
3.3. Results of Interpretability
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Maddox, R.A. Mesoscale convective complexes. Bull. Am. Meteorol. Soc. 1980, 61, 1374–1387. [Google Scholar] [CrossRef]
- Brimelow, J.C.; Hanesiak, J.M.; Burrows, W.R. On the Surface-Convection Feedback during Drought Periods on the Canadian Prairies. Earth Interact. 2011, 15, 1–26. [Google Scholar] [CrossRef]
- Zheng, Y.; Tian, F.; Meng, Z.; Xue, M.; Yao, D.; Bai, L.; Zhou, X.; Mao, X.; Wang, M. Survey and Multi-Scale Characteristics of Wind Samage Caused by Convective Storms in the Surrounding Area of the Capsizing Accident of Cruise Ship “Dongfangzhixing”. Meteorol. Mon. 2016, 42, 1–13. (In Chinese) [Google Scholar]
- Zheng, Y.; Zhou, K.; Sheng, J.; Lin, Y.; Tian, F.; Tang, W.; Lan, Y.; Zhu, W. Advances in Techniques of Monitoring, Forecasting and Warning of Severe Convective Weather. J. Appl. Meteorol. Sci. 2015, 26, 641–657. (In Chinese) [Google Scholar]
- Roberts, R.D.; Rutledge, S. Nowcasting storm initiation and growth using GOES-8 and WSR-88D data. Weather Forecast. 2003, 18, 562–584. [Google Scholar] [CrossRef]
- Stampoulis, D.; Anagnostou, E.N. Evaluation of global satellite rainfall products over continental Europe. J. Hydrometeorol. 2012, 13, 588–603. [Google Scholar] [CrossRef]
- Arkin, P.A.; Meisner, B.N. The relationship between large-scale convective rainfall and cold cloud over the Western Hemisphere during 1982–1984. Mon. Weather Rev. 1987, 115, 51–74. [Google Scholar] [CrossRef]
- Arkin, P.A.; Joyce, R.; Janowiak, J.E. The estimation of global monthly mean rainfall using infrared satellite data: The GOES Precipitation Index (GPI). Remote Sens. Rev. 1994, 11, 107–124. [Google Scholar] [CrossRef]
- Liu, Y.; Fu, Q.; Song, P. Satellite retrieval of precipitation: An overview. Adv. Atmos. Sci. 2011, 26, 1162–1172. (In Chinese) [Google Scholar]
- Bastiaanssen, W.G.M.; Pelgrum, H.; Wang, J.; Ma, Y.; Moreno, J.F.; Roerink, G.J.; van der Wal, T. A remote sensing surface energy balance algorithm for land (SEBAL): Part 2: Validation. J. Hydrol. 1998, 212, 213–229. [Google Scholar] [CrossRef]
- Liang, L.; Liu, C.; Xu, Y.Q.; Guo, B.; Shum, H.Y. Real-time texture synthesis by patch-based sampling. ACM Trans. Graph. 2001, 20, 127–150. [Google Scholar] [CrossRef]
- Scofield, R.A.; Kuligowski, R.J. Status and Outlook of Operational Satellite Precipitation Algorithms for Extreme-Precipitation Events. Weather Forecast. 2003, 18, 1037–1051. [Google Scholar] [CrossRef]
- Ba, M.B.; Gruber, A. GOES Multispectral Rainfall Algorithm (GMSRA). J. Appl. Meteor. Climatol. 2001, 40, 1500–1514. [Google Scholar] [CrossRef]
- Zhang, Y.; Wu, K.; Zhang, J.; Zhang, F.; Xiao, H.; Wang, F.; Zhou, J.; Song, Y.; Peng, L. Estimating Rainfall with Multi-Resource Data over East Asia Based on Machine Learning. Remote Sens. 2021, 13, 3332. [Google Scholar] [CrossRef]
- Chang, G.W.; Lu, H.J.; Chang, Y.R.; Lee, Y.D. An improved neural network-based approach for short-term wind speed and power forecast. Renew. Energ. 2017, 105, 301–311. [Google Scholar] [CrossRef]
- Beusch, L.; Foresti, L.; Gabella, M.; Hamann, U. Satellite-Based Rainfall Retrieval: From Generalized Linear Models to Artificial Neural Networks. Remote Sens. 2018, 10, 939. [Google Scholar] [CrossRef] [Green Version]
- Hsu, K.; Gao, X.; Sorooshian, S.; Gupta, H.V. Precipitation Estimation from Remotely Sensed Information Using Artificial Neural Networks. J. Appl. Meteor. Climatol. 1997, 36, 1176–1190. [Google Scholar] [CrossRef]
- Hong, Y.; Hsu, K.L.; Sorooshian, S.; Gao, X. Precipitation estimation from remotely sensed imagery using an artificial neural network cloud classification system. J. Appl. Meteorol. 2004, 43, 1834–1853. [Google Scholar] [CrossRef] [Green Version]
- Krizhevsky, A.; Sutskever, I.; Hinton, G.E. ImageNet classification with deep convolutional neural networks. Commun. ACM. 2012, 60, 84–90. [Google Scholar] [CrossRef] [Green Version]
- Veillette, M.S.; Hassey, E.P.; Mattioli, C.J.; Iskenderian, H.; Lamey, P.M. Creating Synthetic Radar Imagery Using Convolutional Neural Networks. J. Atmos. Ocean. Technol. 2018, 35, 2323–2338. [Google Scholar] [CrossRef]
- Wang, C.; Xu, J.; Tang, G.; Yang, Y.; Hong, Y. Infrared Precipitation Estimation Using Convolutional Neural Network. IEEE Trans. Geosci. Remote Sens. 2020, 58, 8612–8625. [Google Scholar] [CrossRef]
- Ronneberger, O.; Fischer, P.; Brox, T. 2015: U-Net: Convolutional Networks for Biomedical Image Segmentation. In Proceedings of the 18th International Conference on Medical Image Computing and Computer-Assisted Intervention-MICCAI, Munich, Germany, 5–19 November 2015; Springer: Cham, Switzerland, 2015; pp. 234–241. [Google Scholar]
- Hilburn, K.A.; Ebert-Uphoff, I.; Miller, S.D. Development and Interpretation of a Neural Network-Based Synthetic Radar Reflectivity Estimator Using GOES-R Satellite Observations. J. Appl. Meteor. Climatol. 2020, 60, 1–21. [Google Scholar] [CrossRef]
- Duan, M.; Xia, J.; Yan, Z.; Han, L.; Zhang, L.; Xia, H.; Yu, S. Reconstruction of the Radar Reflectivity of Convective Storms Based on Deep Learning and Himawari-8 Observations. Remote Sens. 2021, 13, 3330. [Google Scholar] [CrossRef]
- Sun, F.; Li, B.; Min, M.; Qin, D. Deep Learning-Based Radar Composite Reflectivity Factor Estimations from Fengyun-4A Geostationary Satellite Observations. Remote Sens. 2021, 13, 2229. [Google Scholar] [CrossRef]
- Yang, L.; Zhao, Q.; Xue, Y.; Sun, F.; Li, J.; Zhen, X.; Lu, T. Radar Composite Reflectivity Reconstruction Based on FY-4A Using Deep Learning. Sensors. 2023, 23, 81. [Google Scholar] [CrossRef]
- Veillette, M.; Samsi, S.; Mattioli, C. Sevir: A storm event imagery dataset for deep learning applications in radar and satellite meteorology. Adv. Neural Inf. Process. Syst. 2020, 33, 22009–22019. [Google Scholar]
- Zhang, P.; Du, B.; Dai, T. Radar Meteorology, 2nd ed.; China Meteorological Press: Beijing, China, 2010. [Google Scholar]
- Van Lent, M.; Fisher, W.; Mancuso, M. An explainable artificial intelligence system for small-unit tactical behavior. In Proceedings of the National Conference on Artificial Intelligence, San Jose, CA, USA, 25–29 July 2004; AAAI Press: Menlo Park, CA, USA; MIT Press: Cambridge, MA, USA; London, UK, 1999; pp. 900–907. [Google Scholar]
- Ribeiro, M.T.; Singh, S.; Guestrin, C. “Why Should I Trust You?” Explaining the Predictions of Any Classifier. In Proceedings of the 22nd ACM SIGKDD International Conference on Knowledge Discovery and Data Mining, New York, NY, USA, 13–17 August 2016; pp. 1135–1144. [Google Scholar]
- Bach, S.; Binder, A.; Montavon, G.; Klauschen, F.; Müller, K.-R.; Samek, W. On Pixel-Wise Explanations for Non-Linear Classifier Decisions by Layer-Wise Relevance Propagation. PLoS ONE 2015, 10, e0130140. [Google Scholar] [CrossRef] [Green Version]
- Lundberg, S.M.; Lee, S.-I. A unified approach to interpreting model predictions. Adv. Neural Inf. Process. Syst. 2017, 30, 4768–4777, ArXiv:1705.07874. [Google Scholar]
- Selvaraju, R.R.; Cogswell, M.; Das, A.; Vedantam, R.; Parikh, D.; Batra, D. Grad-CAM: Visual Explanations from Deep Networks via Gradient-based Localization. Int. J. Comput. Vis. 2020, 128, 336–359. [Google Scholar] [CrossRef] [Green Version]
- Cho, K.; van Merriënboer, B.; Gulcehre, C.; Bahdanau, D.; Bougares, F.; Schwenk, H.; Bengio, Y. Learning phrase representations using RNN encoder-decoder for statistical machine translation. In Proceedings of the 2014 Conference on Empirical Methods in Natural Language Processing (EMNLP), Doha, Qatar, 26–28 October 2014; pp. 1724–1734. [Google Scholar]
- Zhou, Y.; Wang, H.; Zhao, J.; Chen, Y.; Yao, R.; Chen, S. Interpretable attention part model for person re-identification. Acta Autom. Sin. 2020, 41, 116. (In Chinese) [Google Scholar]
- Shrikumar, A.; Greenside, P.; Kundaje, A. Learning important features through propagating activation differences. In Proceedings of the 34th International Conference on Machine Learning. PMLR, Sydney, Australia, 6–11 August 2017; pp. 3145–3153. [Google Scholar]
- Yasuhiko, S.; Hiroshi, S.; Takahito, I.; Akira, S. Convective Cloud Information derived from Himawari-8 data. In Meteorological Satellite Center Technical Note; Meteorological Satellite Center (MSC): Kiyose, Tokyo, 2017; p. 22. [Google Scholar]
- Sun, S.; Li, W.; Huang, Y. Retrieval of Precipitation by Using Himawari-8 Infrared Images. Acta Sci. Nat. Univ. Pekinensis 2019, 55, 215–226. (In Chinese) [Google Scholar]
- Sadeghi, M.; Asanjan, A.A.; Faridzad, M.; Nguyen, P.; Hsu, K.; Sorooshian, S.; Braithwaite, D. PERSIANN-CNN: Precipitation Estimation from Remotely Sensed Information Using Artificial Neural Networks–Convolutional Neural Networks. J. Hydrometeor. 2019, 20, 2273–2289. [Google Scholar] [CrossRef]
- Bathaee, Y. The Artificial Intelligence Black Box and the Failure of Intent and Causation. Harvard J. Law Technol. 2018, 31, 889. [Google Scholar]
- Zhai, G.; Ding, H.; Gao, K. A Numerical Experiment of the Meso-scale Influence of Underlying Surface on a Cyclonic Precipitation Process. J. Hangzhou Univ. (Nat. Sci.) 1995, 22, 185–190. (In Chinese) [Google Scholar]
- Tian, C.; Zhou, W.; Miao, J. Review of lmpact of Land Surface Characteristics on Severe Convective Weather in China. Meteorol. Sci. Technol. 2012, 40, 207–212. (In Chinese) [Google Scholar]
- Lyu, X.; Xu, Y.; Dong, L.; Gao, S. Analysis of characteristics and forecast difficulties of TCs over Northwestern Pacific in 2018. Meteor. Mon. 2021, 47, 359–372. (In Chinese) [Google Scholar]
- Sun, S.; Chen, B.; Sun, J.; Sun, Y.; Diao, X.; Wang, Q. Periodic Characteristics and Cause Analysis of Continuous Heavy Rainfall Induced by Typhoon Yagi (1814) in Shandong. Plateau Meteorol. 2022, 1–15. (In Chinese) [Google Scholar] [CrossRef]
- Zhang, Q.; Li, Y.; Yang, Y. Research Progress on the Cloudage and Its Relation with Precipitation in China. Plateau Mt. Meteorol. Res. 2011, 31, 79–83. (In Chinese) [Google Scholar]
- Zou, Y.; Wang, Y.; Wang, S. Characteristics of lighting activity during severe convective weather in Dalian area based on satellite data. J. Meteorol. Environ. 2021, 37, 128–133. (In Chinese) [Google Scholar]
- Cao, Z.; Wang, X. Cloud Characteristics and Synoptic Background Associated with Severe Convective Storms. J. Appl. Meteorol. Sci. 2013, 24, 365–372. (In Chinese) [Google Scholar]
- McGovern, A.; Lagerquist, R.; Gagne, D.J.; Jergensen, G.E.; Elmore, K.L.; Homeyer, C.R.; Smith, T. Making the black box more transparent: Understanding the physical implications of machine learning. Nat. Mach. Intell. 2019, 100, 2175–2199. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Band | Central Wavelength | Physical Meaning | Type |
|---|---|---|---|
| Band 07 | 3.9 | Shortwave infrared window, low clouds, fog | Cloud |
| Band 08 | 6.2 | Mid and high level water vapor | Water |
| Band 09 | 6.9 | Middle level water vapor | Water |
| Band 10 | 7.3 | Middle and low level water vapor | Water |
| Band 11 | 8.6 | Water vapor, Cloud phase state | Water, Cloud |
| Band 13 | 10.4 | Cloud imaging | Cloud |
| Band 14 | 11.2 | Surface temperature | Temperature |
| Band 15 | 12.4 | Surface temperature | Temperature |
| Band 16 | 13.3 | Temperature, Cloud top height | Temperature, Cloud |
| Band 08-14 | 6.2–11.2 | Temperature, Cloud top height | Temperature, Cloud |
| Band 10-15 | 7.3−12.4 | Temperature, Cloud top height | Temperature, Cloud |
| Band 08-10 | 6.2–7.3 | Water vapor detection above cloud top | Water |
| Band 08-13 | 6.2−10.4 | Water vapor detection above cloud top | Water |
| Band 11-14 | 8.6−11.2 | Cloud phase state | Cloud |
| Band 14-15 | 11.2−12.4 | Cloud phase state | Cloud |
| Band 13-15 | 10.4–12.4 | Detection of ice cloud | Cloud |
| Band 13-16 | 10.4–13.3 | Detection of ice cloud | Cloud |
| Reconstructed CREF (<35 dBZ) | Reconstructed CREF (≥35 dBZ) | |
|---|---|---|
| True CREF (<35 dBZ) | Correct negatives | False alarms |
| True CREF (≥35 dBZ) | Misses | Hits |
| Model | Metric | Region A Test (on Each of the Four Underlying Surfaces, Respectively) | Region B Test (Ocean) |
|---|---|---|---|
| Land-Model | RMSE | 7.4392 | 5.6120 |
| MAE | 3.2353 | 1.8542 | |
| POD (35 dBZ) | 0.1478 | 0.1815 | |
| CSI (35 dBZ) | 0.1274 | 0.1484 | |
| FAR (35 dBZ) | 0.5195 | 0.5509 | |
| BIAS (35 dBZ) | 0.3076 | 0.4042 | |
| Coast-Model | RMSE | 7.1517 | 6.0755 |
| MAE | 3.0315 | 2.1929 | |
| POD (35 dBZ) | 0.2663 | 0.2954 | |
| CSI (35 dBZ) | 0.2177 | 0.1958 | |
| FAR (35 dBZ) | 0.4560 | 0.6327 | |
| BIAS (35 dBZ) | 0.4895 | 0.8042 | |
| Offshore-Model | RMSE | 5.0824 | 5.0591 |
| MAE | 1.4646 | 1.4444 | |
| POD (35 dBZ) | 0.2107 | 0.2144 | |
| CSI (35 dBZ) | 0.1755 | 0.1703 | |
| FAR (35 dBZ) | 0.4879 | 0.5469 | |
| BIAS (35 dBZ) | 0.4115 | 0.4732 | |
| Sea-Model | RMSE | 4.1744 | 7.7300 |
| MAE | 0.7019 | 2.1525 | |
| POD (35 dBZ) | 0.0000 | 0.0000 | |
| CSI (35 dBZ) | 0.0000 | 0.0000 | |
| FAR (35 dBZ) | 0.0000 | 0.0000 | |
| BIAS (35 dBZ) | 0.0000 | 0.0000 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yu, X.; Lou, X.; Yan, Y.; Yan, Z.; Cheng, W.; Wang, Z.; Zhao, D.; Xia, J. Radar Echo Reconstruction in Oceanic Area via Deep Learning of Satellite Data. Remote Sens. 2023, 15, 3065. https://doi.org/10.3390/rs15123065
Yu X, Lou X, Yan Y, Yan Z, Cheng W, Wang Z, Zhao D, Xia J. Radar Echo Reconstruction in Oceanic Area via Deep Learning of Satellite Data. Remote Sensing. 2023; 15(12):3065. https://doi.org/10.3390/rs15123065
Chicago/Turabian StyleYu, Xiaoqi, Xiao Lou, Yan Yan, Zhongwei Yan, Wencong Cheng, Zhibin Wang, Deming Zhao, and Jiangjiang Xia. 2023. "Radar Echo Reconstruction in Oceanic Area via Deep Learning of Satellite Data" Remote Sensing 15, no. 12: 3065. https://doi.org/10.3390/rs15123065
APA StyleYu, X., Lou, X., Yan, Y., Yan, Z., Cheng, W., Wang, Z., Zhao, D., & Xia, J. (2023). Radar Echo Reconstruction in Oceanic Area via Deep Learning of Satellite Data. Remote Sensing, 15(12), 3065. https://doi.org/10.3390/rs15123065