

A Multipath Error Reduction Method for BDS Using Tikhonov Regularization with Parameter Optimization


Abstract
:1. Introduction
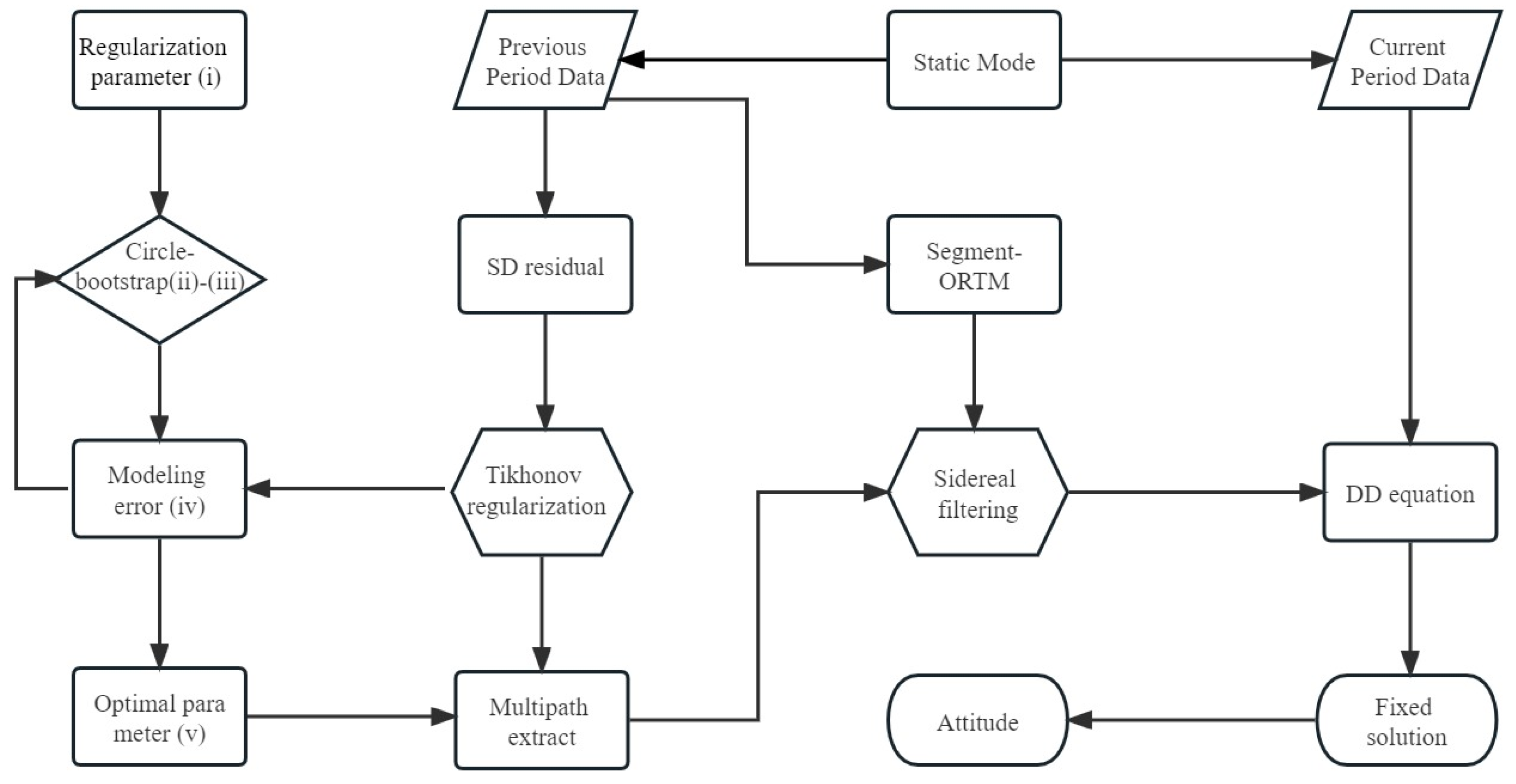
2. Methods
2.1. Single-Difference Residual Reconstruction
2.2. Tikhonov Regularization Modeling
2.2.1. Tikhonov Regularization Modeling Extraction Multipath
2.2.2. Determination of the Regularized Matrix
2.2.3. Determination of Regularization Parameter
- The bootstrap method is used to select the regularization parameter .
- Substitute into Equation (7) and calculate the corresponding multipath error .
- Compute each in the interval cyclically in steps of 0.1 . According to our experience, when m equals 0.1 and n equals 2, the computational efficiency is within an acceptable range while the optimal regularization parameter is guaranteed.
- Repeat step (2) and calculate the multipath error and modeling error corresponding to each .
- Output the regularization parameter corresponding to .
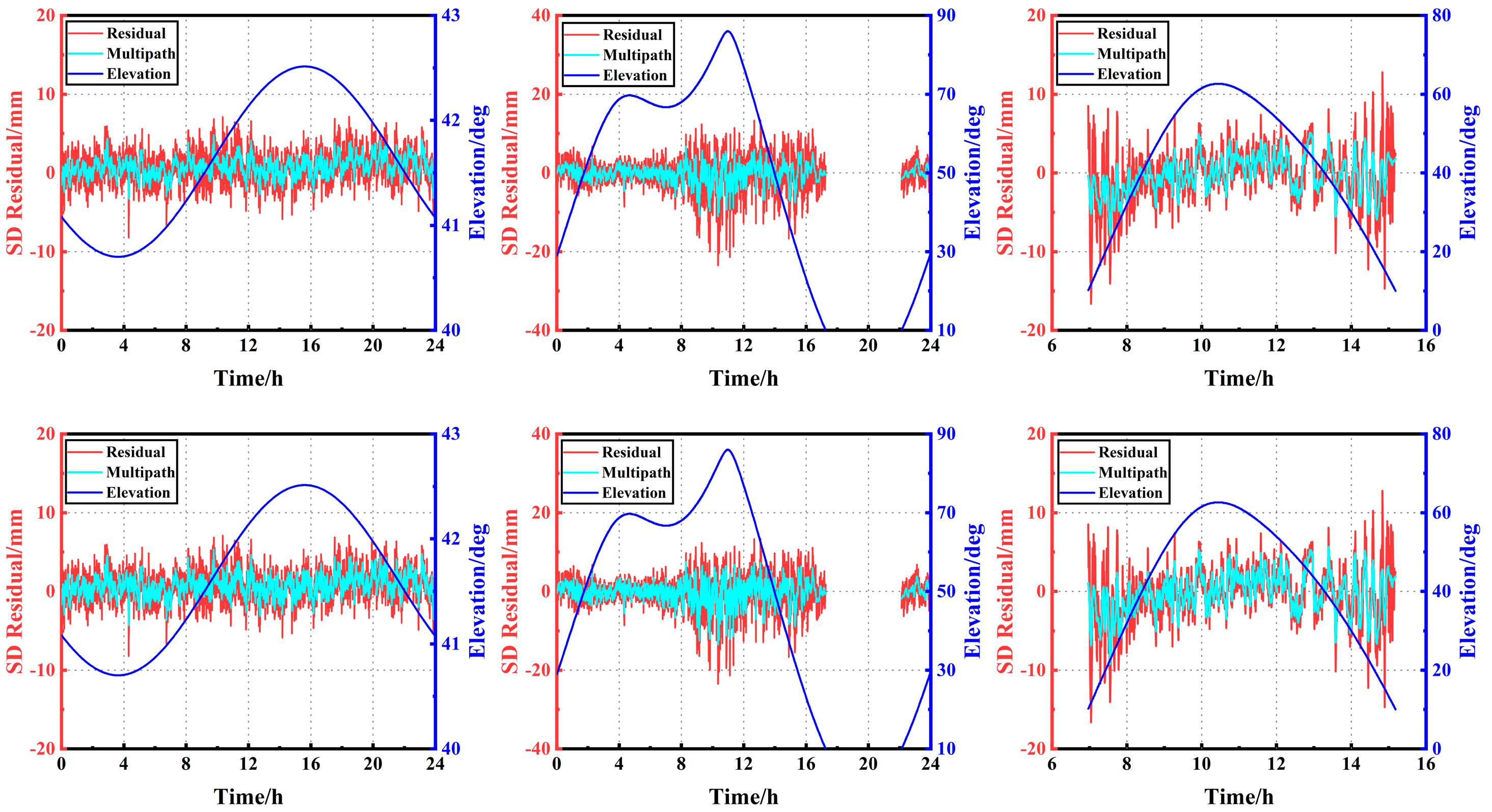
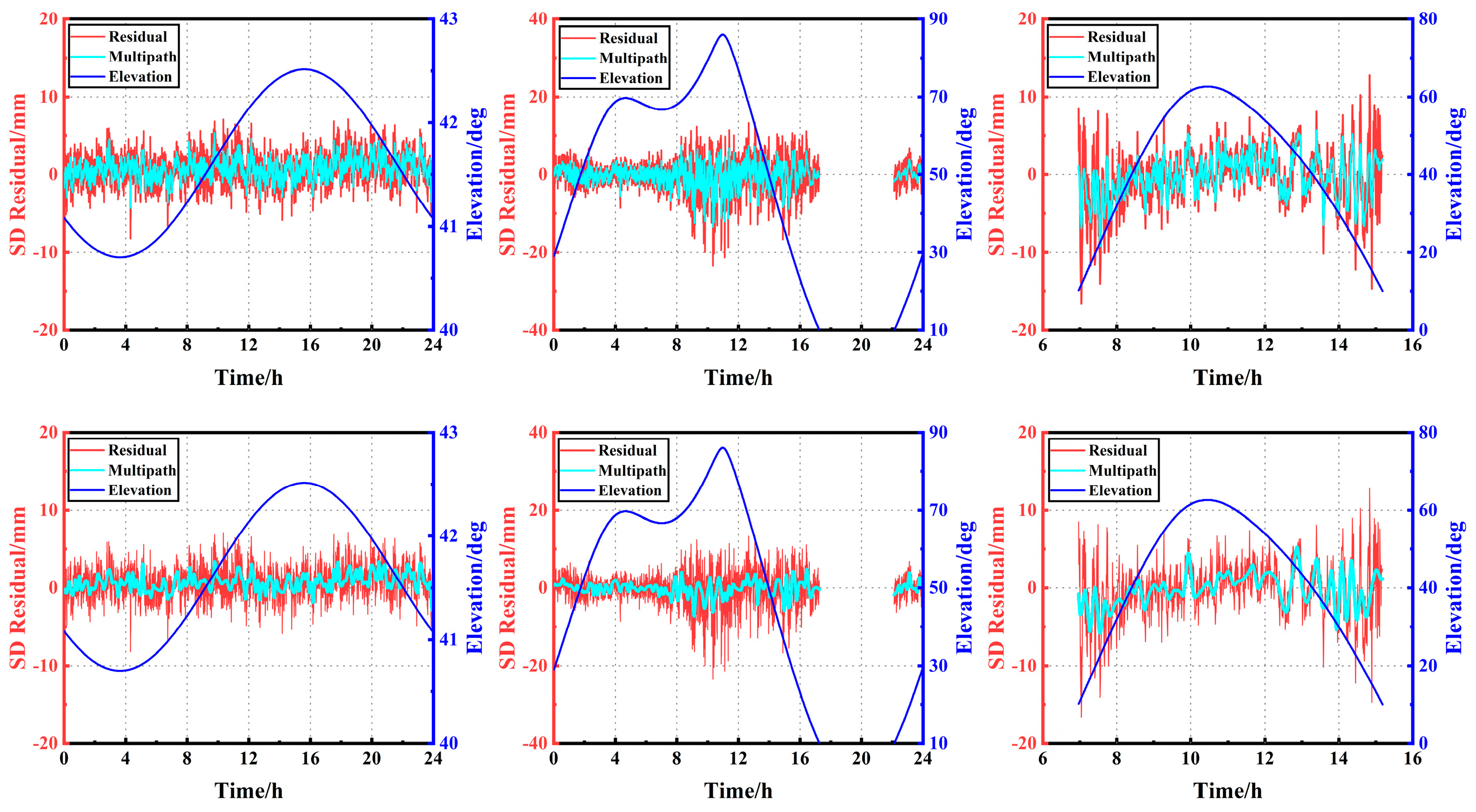
2.3. Wavelet Filtering
2.4. Attitude Determination
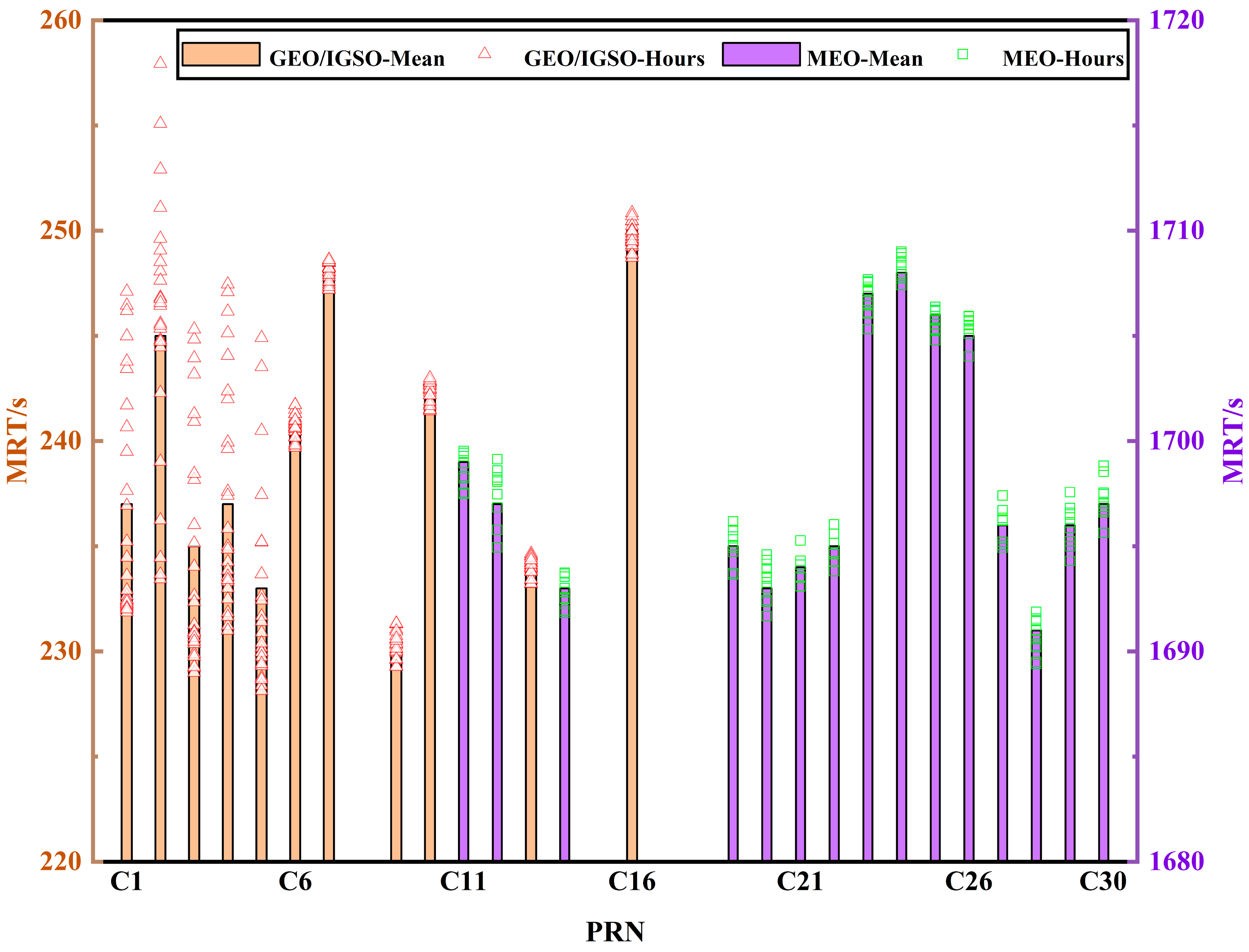
3. Data Processing and Analysis
4. Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Atkins, C.; Ziebart, M. Effectiveness of observation-domain sidereal filtering for GPS precise point positioning. GPS Solut. 2016, 20, 111–122. [Google Scholar] [CrossRef] [Green Version]
- Irsigler, M. Characterization of multipath phase rates in different multipath environments. GPS Solut. 2010, 14, 305–317. [Google Scholar] [CrossRef]
- Lau, L.; Cross, P. Development and testing of a new ray-tracing approach to GNSS carrier-phase multipath modelling. J. Geod. 2007, 81, 713–732. [Google Scholar] [CrossRef]
- Philippov, V.; Sutiagin, I.; Ashjaee, A.J. Measured characteristics of dual depth dual frequency choke ring for multipath rejection in GPS receivers. In Proceedings of the 12th International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GPS 1999), Nashville, TN, USA, 14–17 September 1999; pp. 793–796. [Google Scholar]
- Sanchez-Fernandez, M.; Aguilera-Forero, M.; Garcia-Armada, A. Performance analysis and parameter optimization of DLL and MEDLL in fading multipath environments for next generation navigation receivers. IEEE Trans. Consum. Electron. 2007, 53, 1302–1308. [Google Scholar] [CrossRef]
- Wu, Y.; Chen, X.; Wu, C. Mitigation of multi-path effect using SNR values. Geomat. Inf. Sci. Wuhan Univ. 2008, 33, 842–845. [Google Scholar]
- Cai, M.; Chen, W.; Dong, D.; Song, L.; Wang, M.; Wang, Z.; Zhou, F.; Zheng, Z.; Yu, C. Reduction of kinematic short baseline multipath effects based on multipath hemispherical map. Sensors 2016, 16, 1677. [Google Scholar] [CrossRef] [Green Version]
- Dong, D.; Wang, M.; Chen, W.; Zeng, Z.; Song, L.; Zhang, Q.; Cai, M.; Cheng, Y.; Lv, J. Mitigation of multipath effect in GNSS short baseline positioning by the multipath hemispherical map. J. Geod. 2016, 90, 255–262. [Google Scholar] [CrossRef]
- Guo, J.Y.; Li, G.W.; Kong, Q.L.; Wang, S.Y. Modeling GPS multipath effect based on spherical cap harmonic analysis. Trans. Nonferrous Met. Soc. China 2014, 24, 1874–1879. [Google Scholar] [CrossRef]
- Hodgart, S.; Wong, R. Statistically optimized in-flight estimation of GPS carrier phase multipath for LEO satellite attitude determination. Navigation 2006, 53, 181–202. [Google Scholar] [CrossRef]
- Phan, Q.H.; Tan, S.L.; Mcloughlin, I. GPS multipath mitigation: A nonlinear regression approach. GPS Solut. 2013, 17, 371–380. [Google Scholar] [CrossRef] [Green Version]
- Phan, Q.H.; Tan, S.L.; Mcloughlin, I.; Vu, D.L. A unified framework for GPS code and carrier-phase multipath mitigation using support vector regression. Adv. Artif. Neural Syst. 2013, 2013, 1–14. [Google Scholar] [CrossRef] [Green Version]
- Dai, W.; Huang, D.; Cai, C. Multipath mitigation via component analysis methods for GPS dynamic deformation monitoring. GPS Solut. 2014, 18, 417–428. [Google Scholar] [CrossRef]
- Luo, F.; Dai, W.; Wu, X. EMD filtering based on cross-validation and its application in GPS multipath. Geomat. Inf. Sci. Wuhan Univ. 2012, 37, 450–453. [Google Scholar]
- Lau, L. Wavelet packets based denoising method for measurement domain repeat-time multipath filtering in gps static high-precision positioning. GPS Solut. 2017, 21, 461–474. [Google Scholar] [CrossRef] [Green Version]
- Souza, E.M.; Monico, J.F.G. Wavelet shrinkage: High frequency multipath reduction from GPS relative positioning. GPS Solut. 2004, 8, 152–159. [Google Scholar] [CrossRef]
- Zhang, R.; Xiong, Y.; Lei, F. A multipath error mitigation method for GNSS kinematic single epoch positioning by fusing track inspection information. Geomat. Inf. Sci. Wuhan Univ. 2021, 46, 8. [Google Scholar]
- Zhong, P.; Ding, X.L.; Zheng, D.W.; Chen, W. Separation of structural vibrations and GPS multipath signals using Vondrak filter. J. Cent. South Univ. (Sci. Technol.) 2006, 37, 1189–1195. [Google Scholar]
- Zhou, X.; Dai, W.; Zhu, J.; Zou, Z. HVF method and its application in the study on GPS multipath effects. J. Geod. Geodyn. 2007, 27, 107–111. [Google Scholar]
- Dai, W.; Wu, X.; Luo, F. GPS multipath effect processing method based on augmented parameters kalman filtering. Geomat. Inf. Sci. Wuhan Univ. 2012, 37, 423–427. [Google Scholar]
- Krach, B.; Robertson, P.; Weigel, R. An efficient two-fold marginalized bayesian filter for multipath estimation in satellite navigation receivers. Eurasip J. Adv. Signal Process. 2010, 2010, 1–12. [Google Scholar] [CrossRef] [Green Version]
- Xu, Z.; Li, H.; Li, L.; Zhao, L.; Liu, Y. EKF/SF-based short-baseline BDS multipath mitigation method. Syst. Eng. Electron. 2017, 39, 1334–1340. [Google Scholar]
- Su, M.; Zheng, J.; Yang, Y.; Wu, Q. A new multipath mitigation method based on adaptive thresholding wavelet denoising and double reference shift strategy. GPS Solut. 2018, 22, 40. [Google Scholar] [CrossRef]
- Zhong, P.; Ding, X.; Yuan, L.; Xu, Y.; Kwok, K.; Chen, Y. Sidereal filtering based on single differences for mitigating GPS multipath effects on short baselines. J. Geod. 2010, 84, 145–158. [Google Scholar] [CrossRef]
- Chang, G.; Chen, C.; Yang, Y.; Xu, T. Tikhonov regularization based modeling and sidereal filtering mitigation of GNSS multipath errors. Remote Sens. 2018, 10, 1801. [Google Scholar] [CrossRef] [Green Version]
- Choi, K.; Bilich, A.; Larson, K.M.; Axelrad, P. Modified sidereal filtering: Implications for high-rate GPS positioning. Geophys. Res. Lett. 2004, 31, 178–198. [Google Scholar] [CrossRef] [Green Version]
- Larson, K.M.; Bilich, A.; Axelrad, P. Improving the precision of high-rate GPS. J. Geophys. Res. Solid Earth 2007, 112, B05422. [Google Scholar] [CrossRef]
- Ragheb, A.E.; Clarke, P.J.; Edwards, S.J. GPS sidereal filtering: Coordinate- and carrier-phase-level strategies. J. Geod. 2007, 81, 325–335. [Google Scholar] [CrossRef]
- Wang, M.; Wang, J.; Dong, D.; Li, H.; Han, L.; Chen, W. Comparison of three methods for estimating GPS multipath repeat time. Remote Sens. 2018, 10, 6. [Google Scholar] [CrossRef] [Green Version]
- Yin, H.; Gan, W.; Xiao, G. Modified sidereal filter and its effect on high-rate GPS positioning. Geomat. Inf. Sci. Wuhan Univ. 2011, 36, 4. [Google Scholar]
- Yang, Y.; Li, J.; Wang, A.; Xu, J.; He, H.; Guo, H.; Shen, J. Preliminary assessment of the navigation and positioning performance of BeiDou regional navigation satellite system. Sci. China Earth Sci. 2014, 44, 72–81. [Google Scholar] [CrossRef]
- Ye, S.; Chen, D.; Liu, Y.; Jiang, P.; Tang, W.; Xia, P. Carrier phase multipath mitigation for BeiDou navigation satellite system. GPS Solut. 2015, 19, 545–557. [Google Scholar] [CrossRef]
- Shi, Q.; Dai, W.; Zeng, F.; Zhang, C. The characteristics of BDS carrier phase multipath and its effects on static baseline solution. J. Geod. Geodyn. 2016, 36, 5. [Google Scholar]
- Alber, C.; Ware, R.; Rocken, C.; Braun, J. Obtaining single path phase delays from GPS double differences. Geophys. Res. Lett. 2000, 27, 2661–2664. [Google Scholar] [CrossRef] [Green Version]
- Donatelli, M.; Reichel, L. Square smoothing regularization matrices with accurate boundary conditions. J. Comput. Appl. Math. 2014, 272, 334–349. [Google Scholar] [CrossRef]
- Ford, W. Numerical Linear Algebra with Applications Using MATLAB, 1st ed.; Academic Press: San Diego, CA, USA, 2014. [Google Scholar]
- Yang, L.; Gao, J.; Chang, G.; Chen, C. Effectiveness of L1-norm regularization sidereal filtering for precise point positioning. Acta Geod. Geophys. 2020, 55, 593–607. [Google Scholar] [CrossRef]
- Efron, B.; Tibshirani, R.J. An Introduction to the Bootstrap, 1st ed.; Chapman & Hall: New York, NY, USA, 1993. [Google Scholar]
- Xiong, Y.; Huang, D.; Shum, C.K. GPS phase measure cycle-slip detecting and GPS base-line resolution based on wavelet transformation. Surv. Rev. 2003, 37, 200–207. [Google Scholar] [CrossRef]
- Ma, L.; Zhu, F.; Liu, W.; Lu, L.; Lou, Y.; Zhang, X. VC-LAMBDA: A baseline vector constrained LAMBDA method for integer least-squares estimation. J. Geod. 2022, 96, 59. [Google Scholar] [CrossRef]
- Curtin GNSS Research Centre. Available online: http://saegnss2.curtin.edu.au/ldc/CurtinGNSSReciverSetup (accessed on 22 August 2022).
- Takasu, T.; Yasuda, A. Development of the low-cost RTK-GPS receiver with an open source program package RTKLIB. In Proceedings of the International Symposium on GPS/GNSS, Jeju, Republic of Korea, 4–6 November 2009; pp. 1–8. [Google Scholar]
- Dyer, S.A.; Dyer, J.S. Cubic-spline interpolation. 1. IEEE Instrum. Meas. Mag. 2001, 4, 44–46. [Google Scholar] [CrossRef]
- Shen, C.; Bao, X.; Tan, J.; Liu, S.; Liu, Z. Two noise-robust axial scanning multi-image phase retrieval algorithms based on Pauta criterion and smoothness constraint. Opt. Express 2017, 25, 16235. [Google Scholar] [CrossRef]
- MathWorks. Available online: https://ww2.mathworks.cn/help/wavelet/gs/introduction-to-the-wavelet-families.html (accessed on 24 June 2023).
- Satirapod, C.; Rizos, C. Multipath mitigation by wavelet analysis for GPS base station applications. Surv. Rev. 2005, 38, 2–10. [Google Scholar] [CrossRef]
- Misiti, M.; Misiti, Y.; Oppenheim, G.; Poggi, J.M. Wavelet Toolboxtm User’s Guide R2014a, 4th ed.; The MathWorks: Natick, MA, USA, 2014. [Google Scholar]
- Chen, C.; Chang, G.; Zheng, N.; Xu, T. GNSS multipath error modeling and mitigation by using sparsity-promoting regularization. IEEE Access 2019, 7, 24096–24108. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Type | Uncorrected | After Correcting the Multipath | |||||
|---|---|---|---|---|---|---|---|
| TB Method | Imp. | TC Method | Imp. | Wavelet Filtering | Imp. | ||
| Fixed Rate | 89.4% | 97.3% | 7.9% | 97.6% | 8.2% | 97.5% | 8.1% |
| E | 16.5 | 12.7 | 23% | 12.4 | 24.8% | 12.8 | 22.4% |
| N | 3.8 | 2.8 | 26.3% | 2.8 | 26.3% | 2.9 | 23.7% |
| U | 9.6 | 5.6 | 41.7% | 5.5 | 42.7% | 5.6 | 41.7% |
| Antennas | X | Y | Z |
|---|---|---|---|
| CUT0 | −2364337.6799 | 4870285.6506 | −3360809.3985 |
| CUTC | −2364331.4902 | 4870284.8979 | −3360814.3954 |
| Attitude | 0–1 h | 1–2 h | 2–3 h | 3–4 h |
|---|---|---|---|---|
| Yaw | 40.9972 | 40.9659 | 40.9627 | 40.9574 |
| Pitch | −1.4953 | −1.5345 | −1.5272 | −1.5351 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, X.; Xiong, Y.; Xu, S.; Chen, W.; Zhao, B.; Zhang, R. A Multipath Error Reduction Method for BDS Using Tikhonov Regularization with Parameter Optimization. Remote Sens. 2023, 15, 3400. https://doi.org/10.3390/rs15133400
Li X, Xiong Y, Xu S, Chen W, Zhao B, Zhang R. A Multipath Error Reduction Method for BDS Using Tikhonov Regularization with Parameter Optimization. Remote Sensing. 2023; 15(13):3400. https://doi.org/10.3390/rs15133400
Chicago/Turabian StyleLi, Xinzhong, Yongliang Xiong, Shaoguang Xu, Weiwei Chen, Ban Zhao, and Rui Zhang. 2023. "A Multipath Error Reduction Method for BDS Using Tikhonov Regularization with Parameter Optimization" Remote Sensing 15, no. 13: 3400. https://doi.org/10.3390/rs15133400
APA StyleLi, X., Xiong, Y., Xu, S., Chen, W., Zhao, B., & Zhang, R. (2023). A Multipath Error Reduction Method for BDS Using Tikhonov Regularization with Parameter Optimization. Remote Sensing, 15(13), 3400. https://doi.org/10.3390/rs15133400