
An Improved Doppler-Aided Smoothing Code Algorithm for BeiDou-2/BeiDou-3 un-Geostationary Earth Orbit Satellites in Consideration of Satellite Code Bias



Abstract
:
1. Introduction
2. Methods
2.1. Basic Model of Carrier Smoothed Code
2.2. Error Analysis of Carrier Smoothed Code
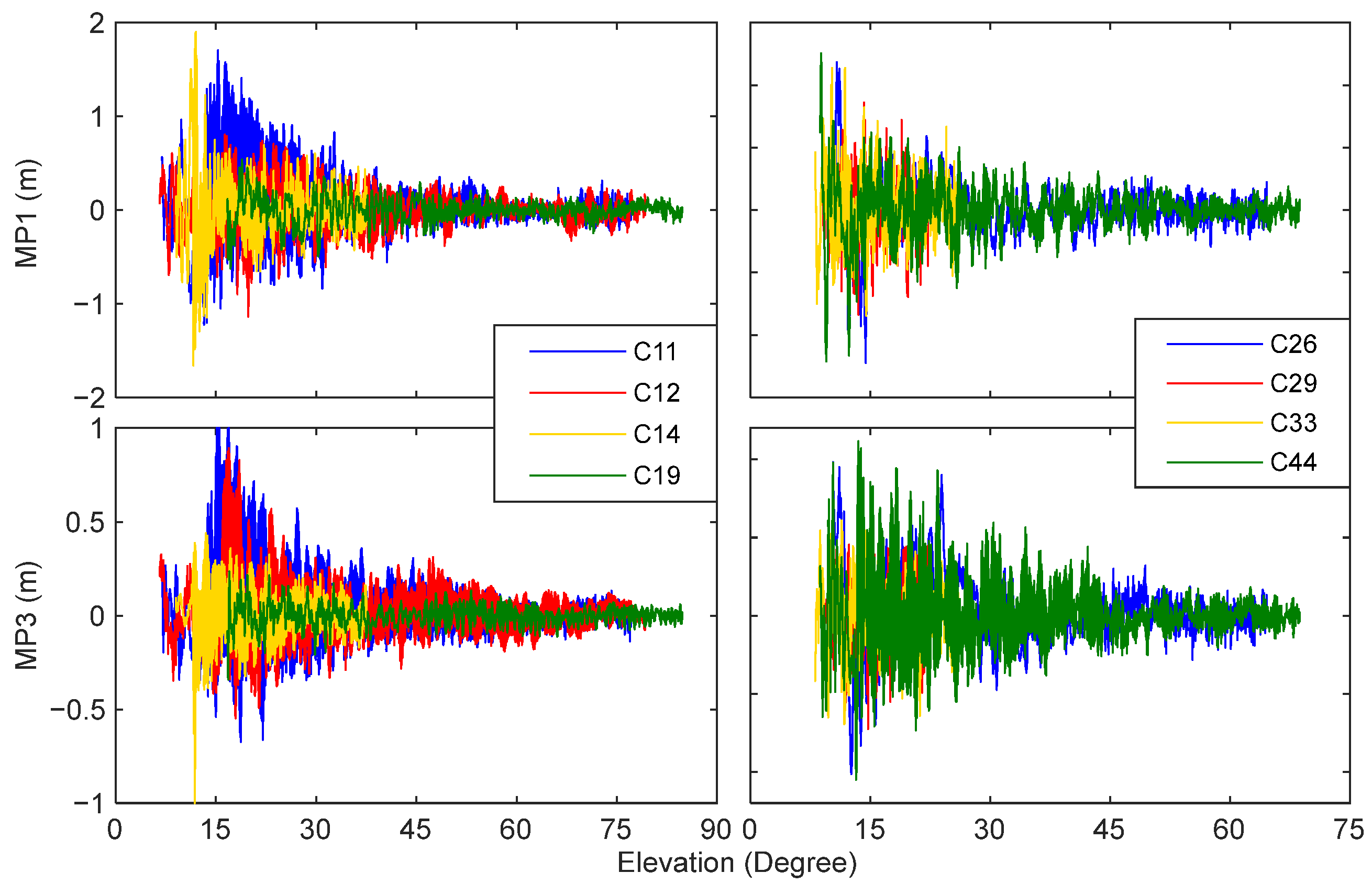
2.3. Empirical Correction of Multipath Effect in the Satellite-End
2.4. Basic Model of Doppler Smoothed Code
2.5. Refined Model of Doppler Smoothed Code
3. Results
3.1. Datasets
3.2. Elevation-Dependent SCB Correction Model for BDS Satellites
3.3. Reconstruction and Analysis of MP Deviations with Corrected Code Measurements
3.4. Statistic and Analysis of Code Measurements with Epoch-Difference Method
3.5. Positioning Accuracy of SPP with BDS-2 Code Measurements
4. Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Hofmann-Wellenhof, B.; Lichtenegger, H.; Collins, J. Global Positioning System: Theory and Practice, 5th ed.; Springer: New York, NY, USA, 2001; pp. 181–188. [Google Scholar]
- Xu, G.; Xu, Y. Parameterization and algorithms of GPS data processing. In GPS Theory, Algorithms and Applications, 3rd ed.; Springer: New York, NY, USA, 2016; pp. 291–300. [Google Scholar]
- Won, J.H.; Pany, T. Signal processing. In Springer Handbook of Global Navigation Satellite Systems, 1st ed.; Teunissen, P.J.G., Montenbruck, O., Eds.; Springer: New York, NY, USA, 2017; pp. 428–434. [Google Scholar]
- Hatch, R. The synergism of GPS code and carrier measurements. In Proceedings of the 3rd International Geodetic Symposium on Satellite Doppler Positioning, Las Cruces, NM, USA, 8–12 February 1982. [Google Scholar]
- Hatch, R. Dynamic differential GPS at the centimeter level. In Proceedings of the 4th International Geodetic Symposium on Satellite Positioning, Austin, TX, USA, 28 April–2 May 1986. [Google Scholar]
- Hwang, P.Y.; McGraw, G.A.; Bader, J.R. Enhanced differential GPS carrier-smoothed code processing using dual-frequency measurements. Navigation 1999, 46, 127–138. [Google Scholar] [CrossRef]
- Bisnath, S.B.; Langley, R.B. High-precision, kinematic positioning with a single GPS receiver. Navigation 2002, 49, 161–169. [Google Scholar] [CrossRef]
- Park, B.; Sohn, K.; Kee, C. Optimal Hatch filter with an adaptive smoothing window width. J. Navig. 2008, 61, 435–454. [Google Scholar] [CrossRef]
- Gunther, C.; Henkel, P. Reduced-noise ionosphere-free carrier smoothed code. IEEE Trans. Aerosp. Electron. Syst. 2010, 46, 323–334. [Google Scholar] [CrossRef]
- Gao, X.; Yang, Z.; Du, Y.; Yang, B. An improved real-time cycle slip correction algorithm based on Doppler-aided signals for BDS triple-frequency measurements. Adv. Space Res. 2021, 67, 223–233. [Google Scholar] [CrossRef]
- Geng, J.; Jiang, E.; Li, G.; Xin, S.; Wei, N. An Improved Hatch Filter Algorithm towards SubMeter Positioning Using only Android Raw GNSS Measurements without External Augmentation Corrections. Remote Sens. 2019, 11, 1679. [Google Scholar] [CrossRef] [Green Version]
- Cheng, P. Remarks on Doppler-aided smoothing of code ranges. J. Geod. 1999, 73, 23–28. [Google Scholar] [CrossRef]
- Kubo, N. Advantage of velocity measurements on instantaneous RTK positioning. GPS Solut. 2009, 13, 271–280. [Google Scholar] [CrossRef] [Green Version]
- Chen, C.; Chang, G.; Luo, F.; Zhang, S. Dual-frequency carrier smoothed code filtering with dynamical ionospheric delay modeling. Adv. Space Res. 2019, 63, 857–870. [Google Scholar] [CrossRef]
- Bruton, A.M.; Glennie, C.L.; Schwarz, K.P. Differentiation for high-precision GPS velocity and. acceleration determination. GPS Solut. 1999, 2, 7–21. [Google Scholar] [CrossRef]
- Lee, H.; Rizos, C.; Jee, G.I. Position domain filtering and range domain filtering for carrier-smoothed-code DGNSS: An analytical comparison. IEE Proc. Radar Sonar Navig. 2005, 152, 271–276. [Google Scholar] [CrossRef] [Green Version]
- Zhang, J.; Zhang, K.; Grenfell, R.; Deakin, R. Short note: On the relativistic Doppler effect for precise velocity determination using GPS. J. Geod. 2006, 80, 104–110. [Google Scholar] [CrossRef]
- Zhang, X.; Guo, B.; Guo, F.; Du, C. Influence of clock jump on the velocity and acceleration estimation with a single GPS receiver based on carrier-phase-derived Doppler. GPS Solut. 2013, 17, 549–559. [Google Scholar] [CrossRef]
- Bahrami, M.; Ziebart, M. A Kalman filter-based Doppler-smoothing of code pseudoranges in GNSS-challenged environments. In Proceedings of the 24th International Technical Meeting of the Satellite Division of the Institute of Navigation (ION GNSS 2011), Portland, OR, USA, 19–23 September 2011. [Google Scholar]
- Zhou, Z.; Li, B. Optimal Doppler-aided smoothing strategy for GNSS navigation. GPS Solut. 2017, 21, 197–210. [Google Scholar] [CrossRef]
- Zhang, K.; Jiao, W.; Wang, L.; Li, Z.; Li, J.; Zhou, K. Smart-RTK: Multi-GNSS kinematic positioning approach on android smart devices with Doppler-smoothed-code filter and constant acceleration model. Adv. Space Res. 2019, 64, 1662–1674. [Google Scholar] [CrossRef]
- Zhou, H.; Li, Z.; Liu, C.; Xu, J.; Li, S.; Zhou, K. Assessment of the performance of carrier-phase and Doppler smoothing code for low-cost GNSS receiver positioning. Results Phys. 2020, 19, 103574. [Google Scholar] [CrossRef]
- Li, R.; Zheng, S.; Wang, E.; Chen, J.; Feng, S.; Wang, D.; Dai, L. Advances in BeiDou Navigation Satellite System (BDS) and satellite navigation augmentation technologies. Satell. Navig. 2020, 1, 12. [Google Scholar] [CrossRef]
- Yang, Y.; Ren, X.; Jia, X.; Sun, B. Development trends of the national secure PNT system based on BDS. Sci. China Earth Sci. 2023, 66, 929–938. [Google Scholar] [CrossRef]
- Hauschild, A.; Montenbruck, O.; Sleewaegen, J.M.; Huisman, L.; Teunissen, P.J.G. Characterization of COMPASS M-1 signals. GPS Solut. 2012, 16, 117–126. [Google Scholar] [CrossRef]
- Wanninger, L.; Beer, S. BeiDou satellite-induced code pseudorange variations: Diagnosis and therapy. GPS Solut. 2015, 19, 639–648. [Google Scholar] [CrossRef] [Green Version]
- Lei, W.; Wu, G.; Tao, X.; Bian, L.; Wang, L. BDS satellite-induced code multipath: Mitigation and assessment in new-generation IOV satellites. Adv. Space Res. 2017, 60, 2672–2679. [Google Scholar] [CrossRef]
- Guo, F.; Li, X.; Liu, W. Mitigating BeiDou Satellite-Induced Code Bias: Taking into Account the Stochastic Model of Corrections. Sensors 2016, 16, 909. [Google Scholar] [CrossRef] [Green Version]
- Lou, Y.; Gong, X.; Gu, S.; Zheng, F.; Feng, Y. Assessment of code bias variations of BDS triple-frequency signals and their impacts on ambiguity resolution for long baselines. GPS Solut. 2017, 21, 177–186. [Google Scholar] [CrossRef]
- Zou, X.; Li, Z.; Li, M.; Tang, W.; Deng, C.; Chen, L.; Wang, C.; Shi, C. Modeling BDS pseudorange variations and models assessment. GPS Solut. 2017, 21, 1661–1668. [Google Scholar] [CrossRef]
- Pan, L.; Guo, F.; Ma, F. An improved bds satellite-induced code bias correction model considering the consistency of multipath combinations. Remote Sens. 2018, 10, 1189. [Google Scholar] [CrossRef] [Green Version]
- Zhang, X.; Li, X.; Lu, C.; Wu, M.; Pan, L. A comprehensive analysis of satellite-induced code bias for BDS-3 satellites and signals. Adv. Space Res. 2019, 639, 2822–2835. [Google Scholar] [CrossRef]
- McGraw, G.A. Generalized divergence-free carrier smoothing with applications to dual frequency differential GPS. Navigation 2009, 56, 115–122. [Google Scholar] [CrossRef]
- Shu, B.; Liu, H.; Xu, L.; Gong, X.; Qian, C.; Zhang, M.; Zhang, R. Analysis of satellite-induced factors affecting the accuracy of the BDS satellite differential code bias. GPS Solut. 2017, 21, 905–916. [Google Scholar] [CrossRef]
- Zhou, R.; Hu, Z.; Zhao, Q.; Li, P.; Wang, W.; He, C.; Cai, C.; Pan, Z. Elevation-dependent pseudorange variation characteristics analysis for the new-generation BeiDou satellite navigation system. GPS Solut. 2018, 22, 60. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| BDS-2 PRN | Orbit Type | Launch Date | RMS of Raw Code | RMS of Corrected Code | Improvement | |||
|---|---|---|---|---|---|---|---|---|
| B1 | B3 | B1 | B3 | B1 | B3 | |||
| C06 | IGSO | 1 August 2010 | 0.21 | 0.11 | 0.14 | 0.07 | 33.3% | 36.4% |
| C07 | IGSO | 18 December 2010 | 0.16 | 0.09 | 0.14 | 0.06 | 12.5% | 33.3% |
| C09 | IGSO | 27 July 2011 | 0.19 | 0.12 | 0.17 | 0.07 | 10.5% | 41.7% |
| C10 | IGSO | 2 December 2011 | 0.22 | 0.09 | 0.16 | 0.06 | 27.3% | 33.3% |
| C13 | IGSO | 30 March 2016 | 0.21 | 0.18 | 0.14 | 0.06 | 33.3% | 66.7% |
| C16 | IGSO | 10 July 2018 | 0.21 | 0.13 | 0.15 | 0.07 | 28.6% | 46.2% |
| C39 | IGSO | 25 June 2019 | 0.21 | 0.07 | 0.19 | 0.05 | 9.5% | 28.6% |
| C40 | IGSO | 5 November 2019 | 0.13 | 0.06 | 0.13 | 0.06 | 0 | 0 |
| C11 | MEO | 30 April 2012 | 0.54 | 0.30 | 0.16 | 0.21 | 70.4% | 30.0% |
| C12 | MEO | 30 April 2012 | 0.45 | 0.25 | 0.27 | 0.17 | 40.0% | 32.0% |
| C14 | MEO | 19 September 2012 | 0.35 | 0.18 | 0.26 | 0.14 | 25.7% | 22.2% |
| C19 | MEO | 5 November 2017 | 0.19 | 0.06 | 0.19 | 0.05 | 0 | 16.7% |
| C26 | MEO | 29 July 2018 | 0.22 | 0.11 | 0.16 | 0.08 | 27.3% | 27.3% |
| C29 | MEO | 30 March 2018 | 0.29 | 0.12 | 0.27 | 0.11 | 6.9% | 8.3% |
| C33 | MEO | 19 September 2018 | 0.30 | 0.12 | 0.26 | 0.09 | 13.3% | 25.0% |
| C44 | MEO | 23 November 2019 | 0.19 | 0.13 | 0.19 | 0.12 | 0 | 7.7% |
| Interval (Second) | RMS of RDSC | RMS of RDSC-SCB | 3D Improvement Rate (%) | ||||
|---|---|---|---|---|---|---|---|
| East | North | Up | East | North | Up | ||
| 1 | 1.153 | 2.269 | 4.162 | 1.111 | 2.312 | 3.693 | 0.68/8.46 |
| 15 | 1.133 | 2.256 | 4.122 | 1.186 | 2.299 | 3.716 | 1.57/6.20 |
| 30 | 1.139 | 2.262 | 4.159 | 1.195 | 2.286 | 3.752 | 0.81/5.44 |
| 45 | 1.144 | 2.266 | 4.172 | 1.200 | 2.289 | 3.773 | 0.60/5.13 |
| 60 | 1.144 | 2.267 | 4.173 | 1.203 | 2.291 | 3.772 | 0.45/5.19 |
| 75 | 1.147 | 2.270 | 4.186 | 1.207 | 2.309 | 3.781 | 0.37/5.00 |
| 90 | 1.148 | 2.268 | 4.185 | 1.206 | 2.303 | 3.815 | 0.35/4.58 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gao, X.; Ma, Z.; Jia, L.; Pan, L. An Improved Doppler-Aided Smoothing Code Algorithm for BeiDou-2/BeiDou-3 un-Geostationary Earth Orbit Satellites in Consideration of Satellite Code Bias. Remote Sens. 2023, 15, 3549. https://doi.org/10.3390/rs15143549
Gao X, Ma Z, Jia L, Pan L. An Improved Doppler-Aided Smoothing Code Algorithm for BeiDou-2/BeiDou-3 un-Geostationary Earth Orbit Satellites in Consideration of Satellite Code Bias. Remote Sensing. 2023; 15(14):3549. https://doi.org/10.3390/rs15143549
Chicago/Turabian StyleGao, Xiao, Zongfang Ma, Luxiao Jia, and Lin Pan. 2023. "An Improved Doppler-Aided Smoothing Code Algorithm for BeiDou-2/BeiDou-3 un-Geostationary Earth Orbit Satellites in Consideration of Satellite Code Bias" Remote Sensing 15, no. 14: 3549. https://doi.org/10.3390/rs15143549
APA StyleGao, X., Ma, Z., Jia, L., & Pan, L. (2023). An Improved Doppler-Aided Smoothing Code Algorithm for BeiDou-2/BeiDou-3 un-Geostationary Earth Orbit Satellites in Consideration of Satellite Code Bias. Remote Sensing, 15(14), 3549. https://doi.org/10.3390/rs15143549