
On-Orbit Calibration and Wet Tropospheric Correction of HY-2C Correction Microwave Radiometer

Abstract
:1. Introduction
2. Materials and Methods
2.1. On-Orbit Calibration Based on Antenna Pattern Correction
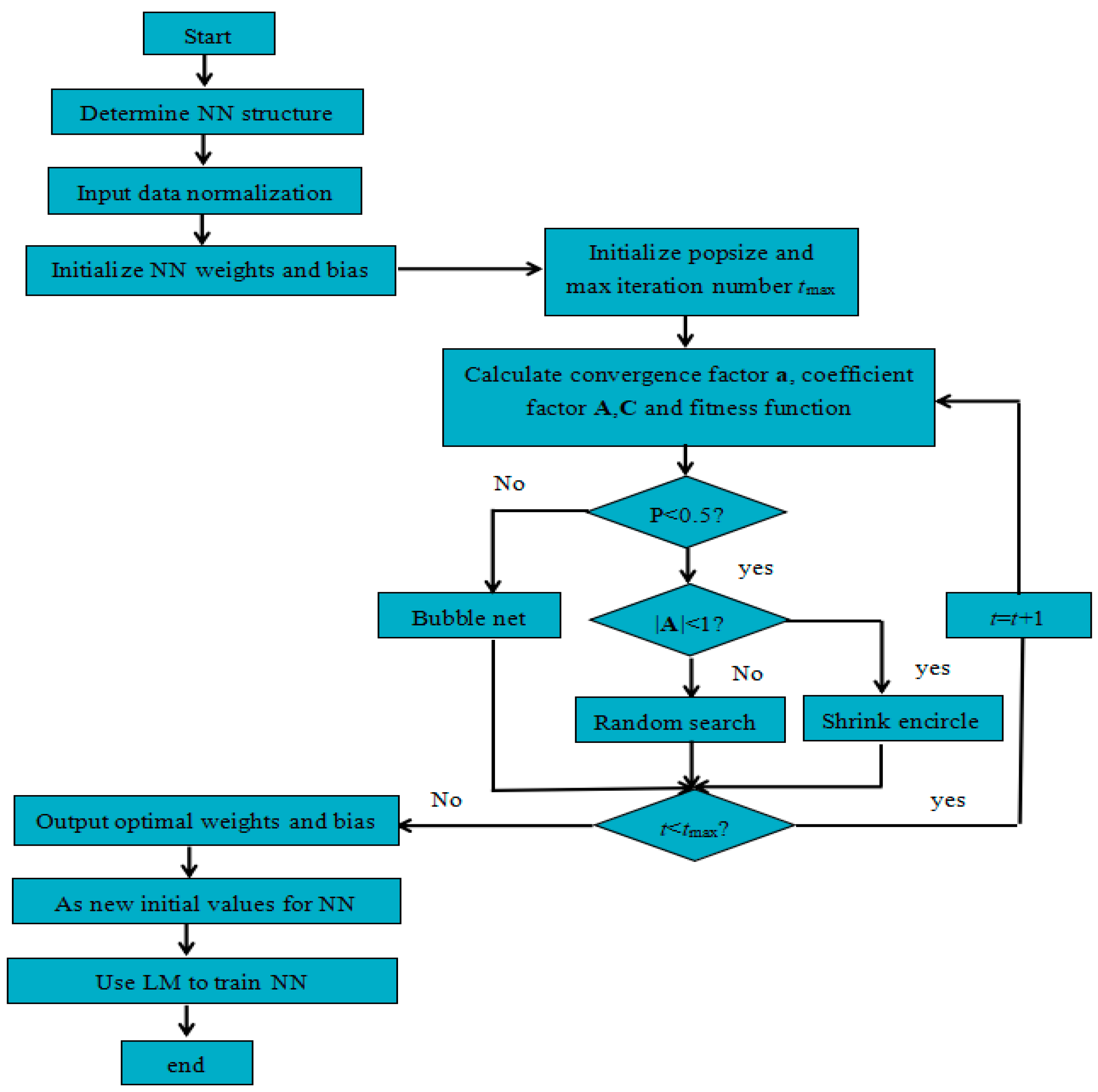
2.2. On-Orbit Calibration Based on Neural Network and OMB Method
2.3. Wet Tropospheric Correction Based on WOA–LM–BP
3. Experimental Data and Processing
3.1. On-Orbit Calibration Experimental Data Processing
3.2. Wet Tropospheric Correction Experimental Data Processing
4. Results
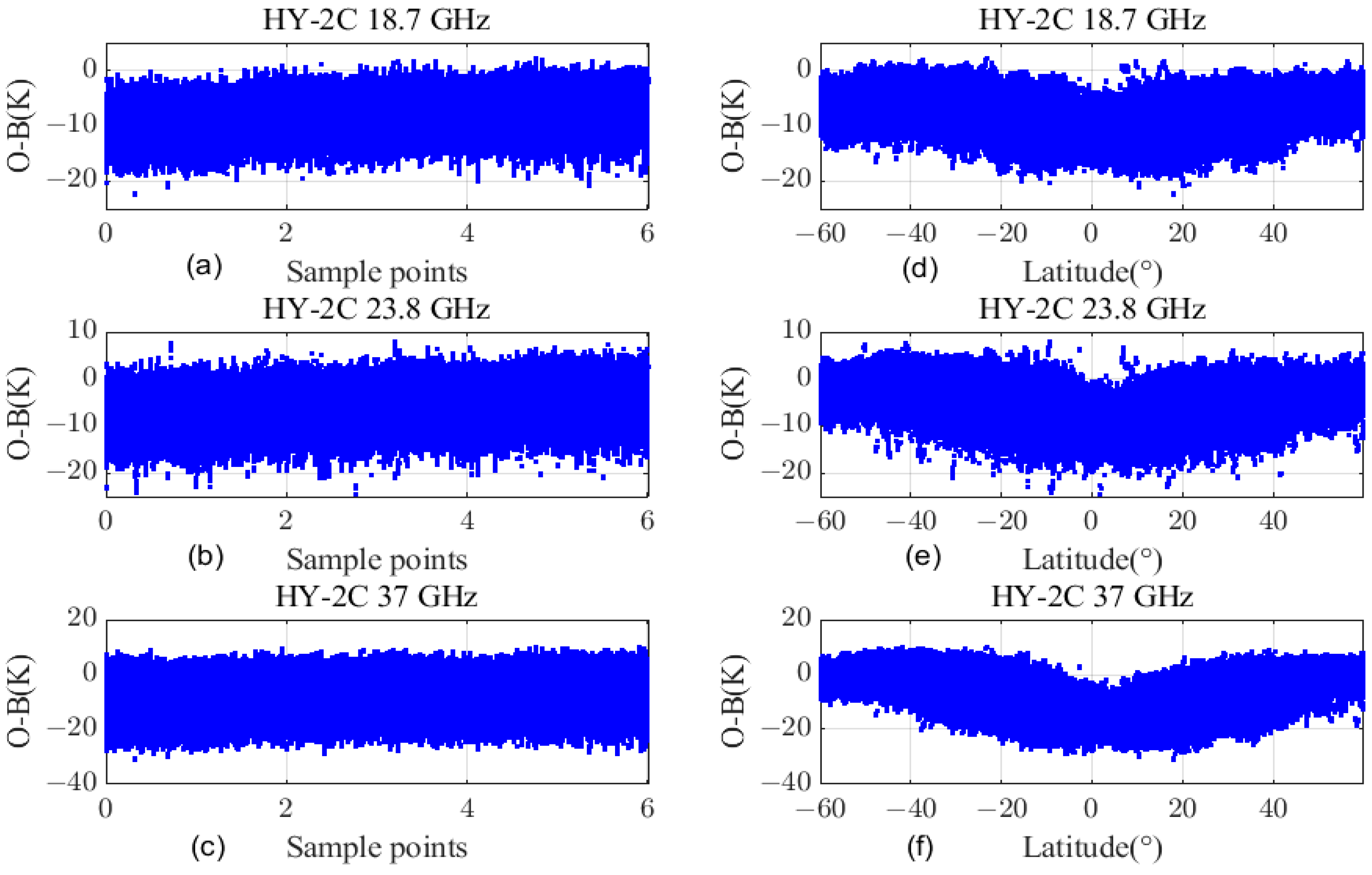
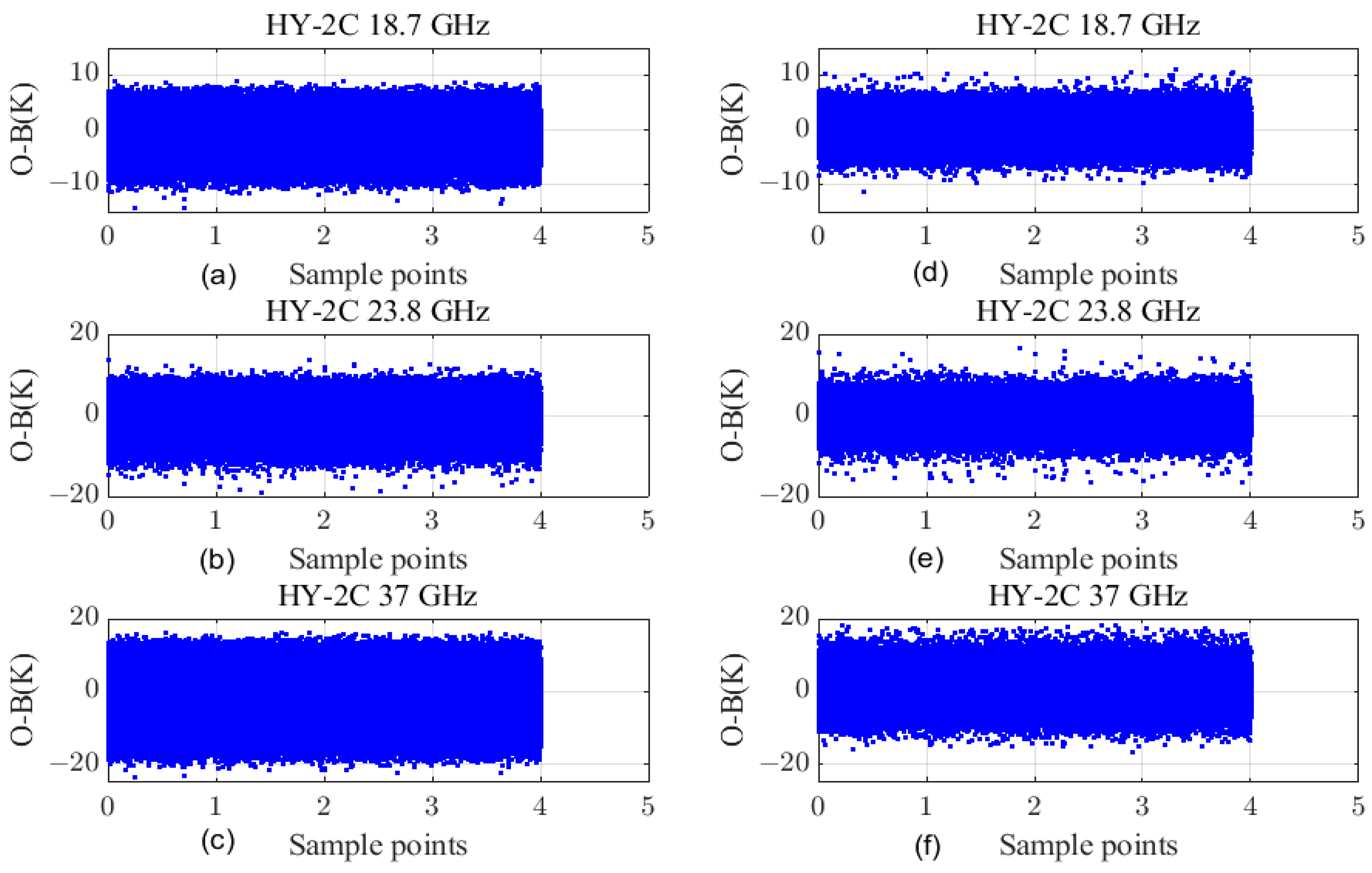
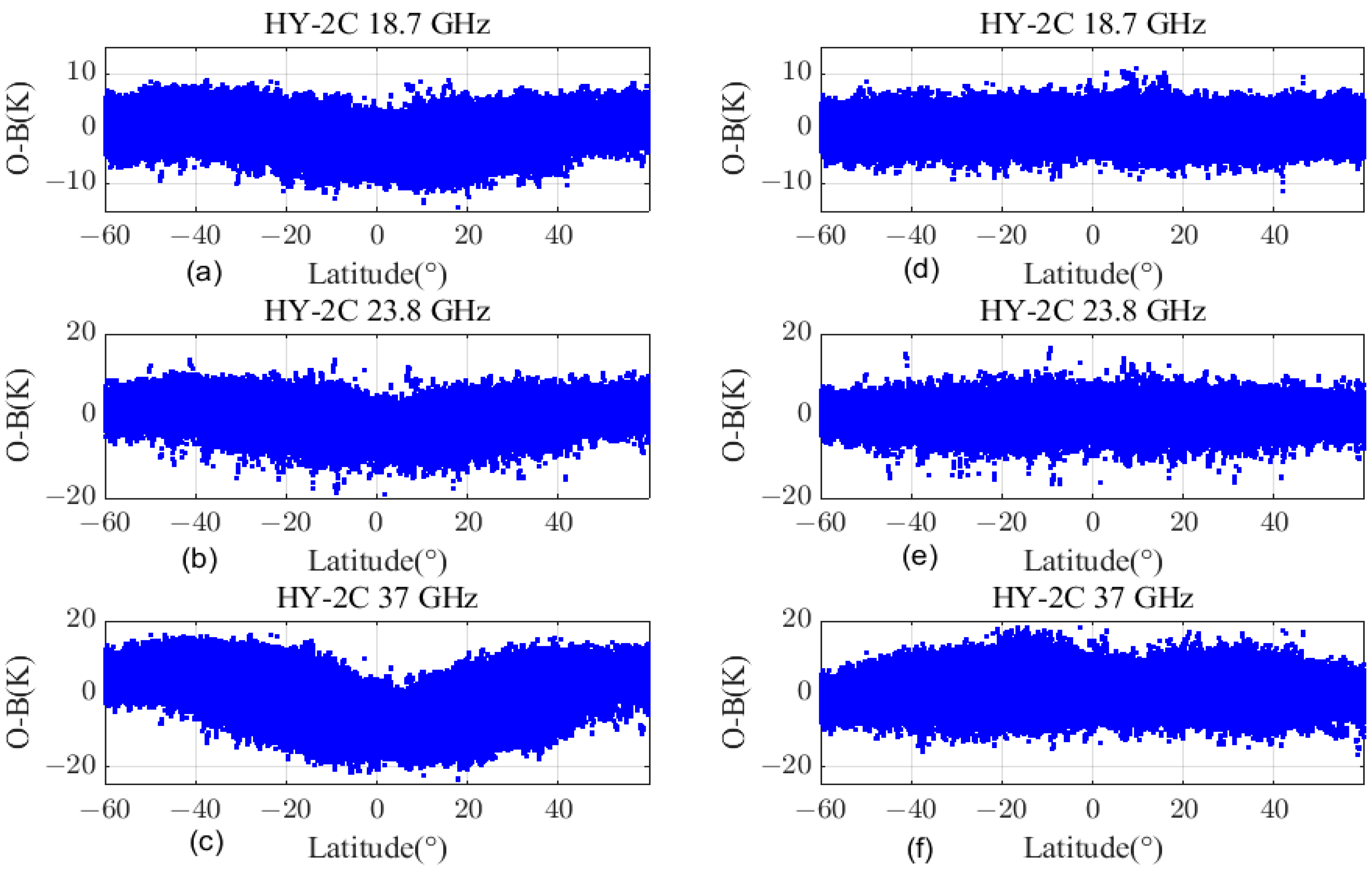
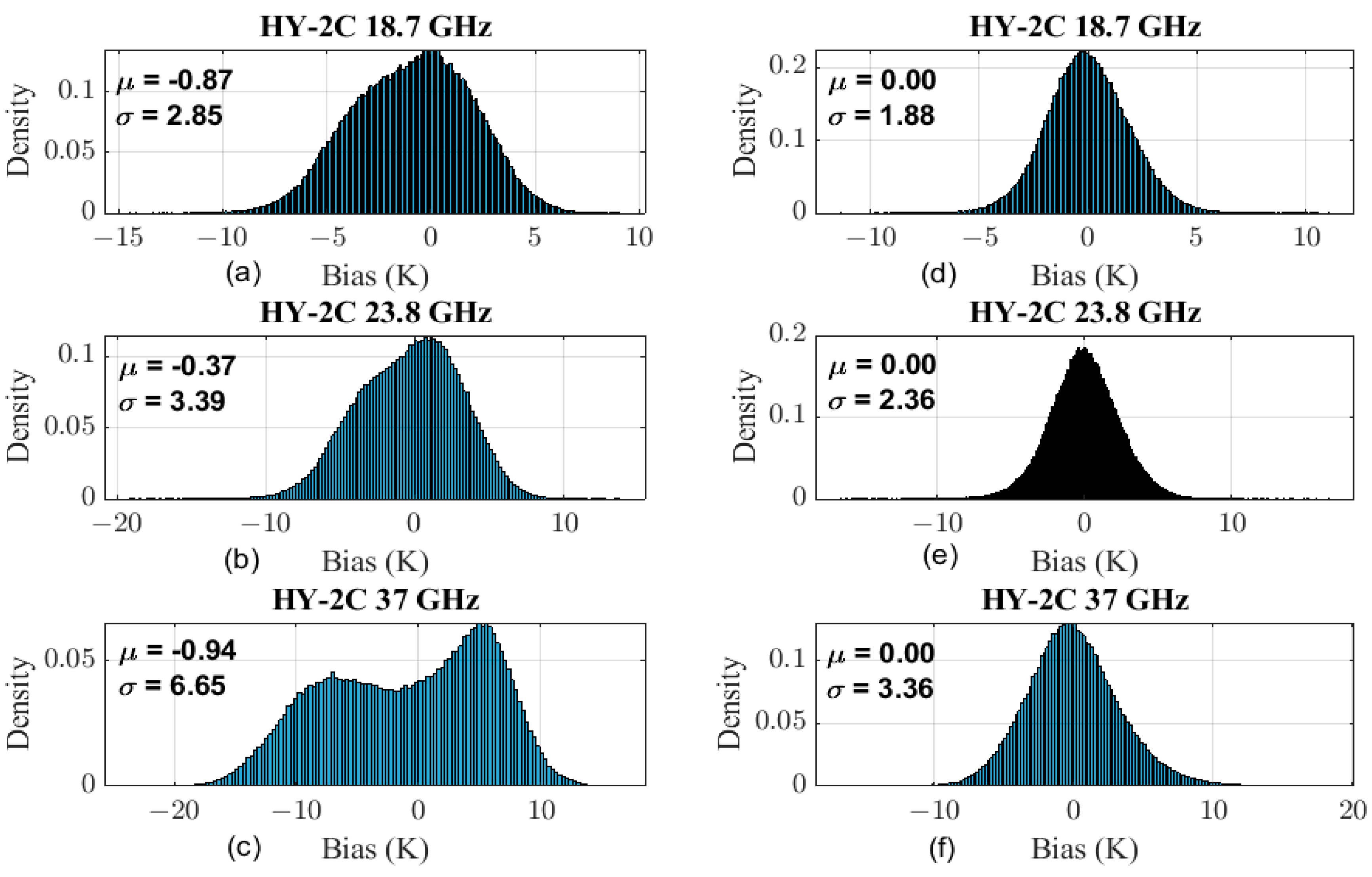
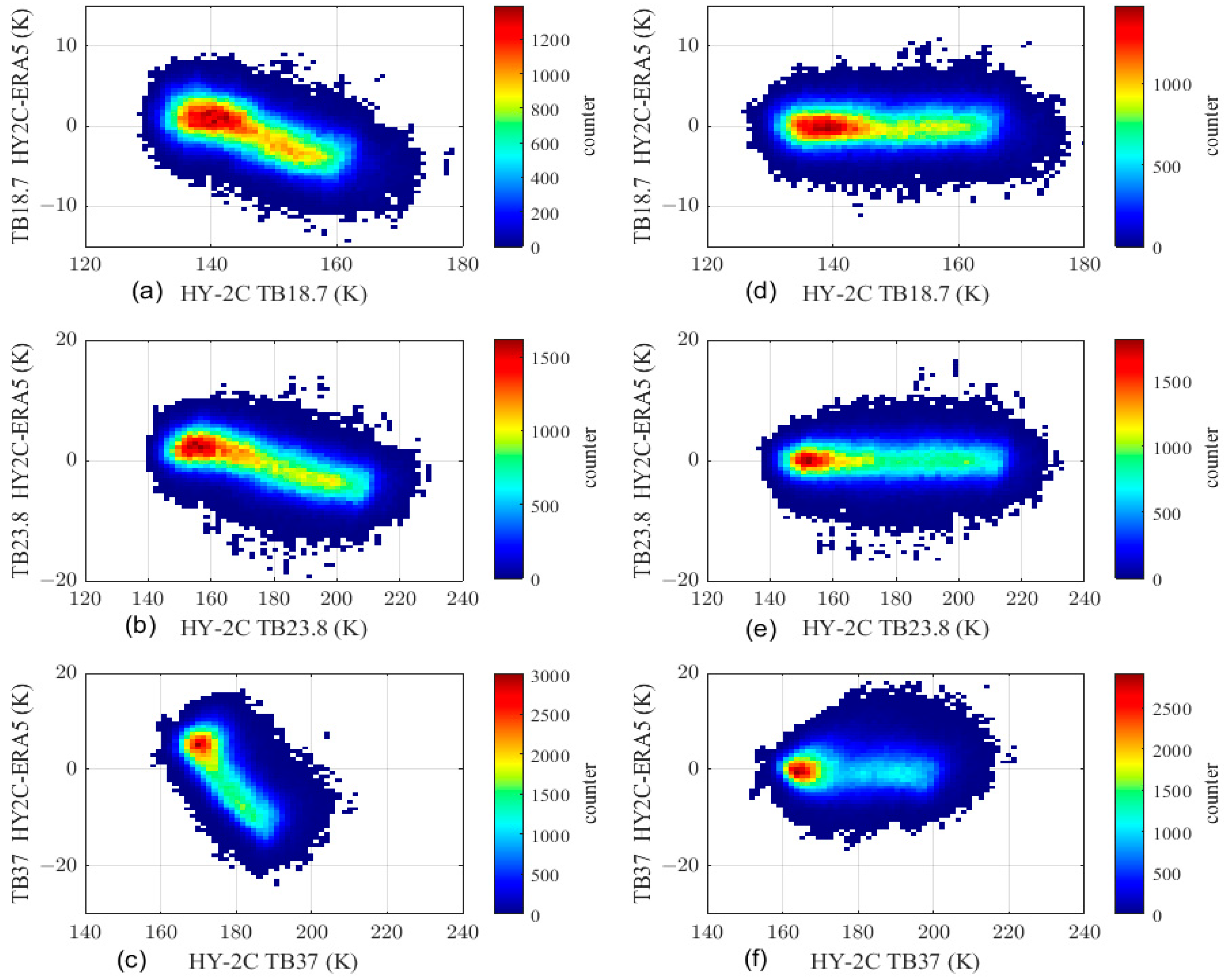
4.1. On-Orbit Calibration Results and Analysis
4.2. WTC Results and Analysis
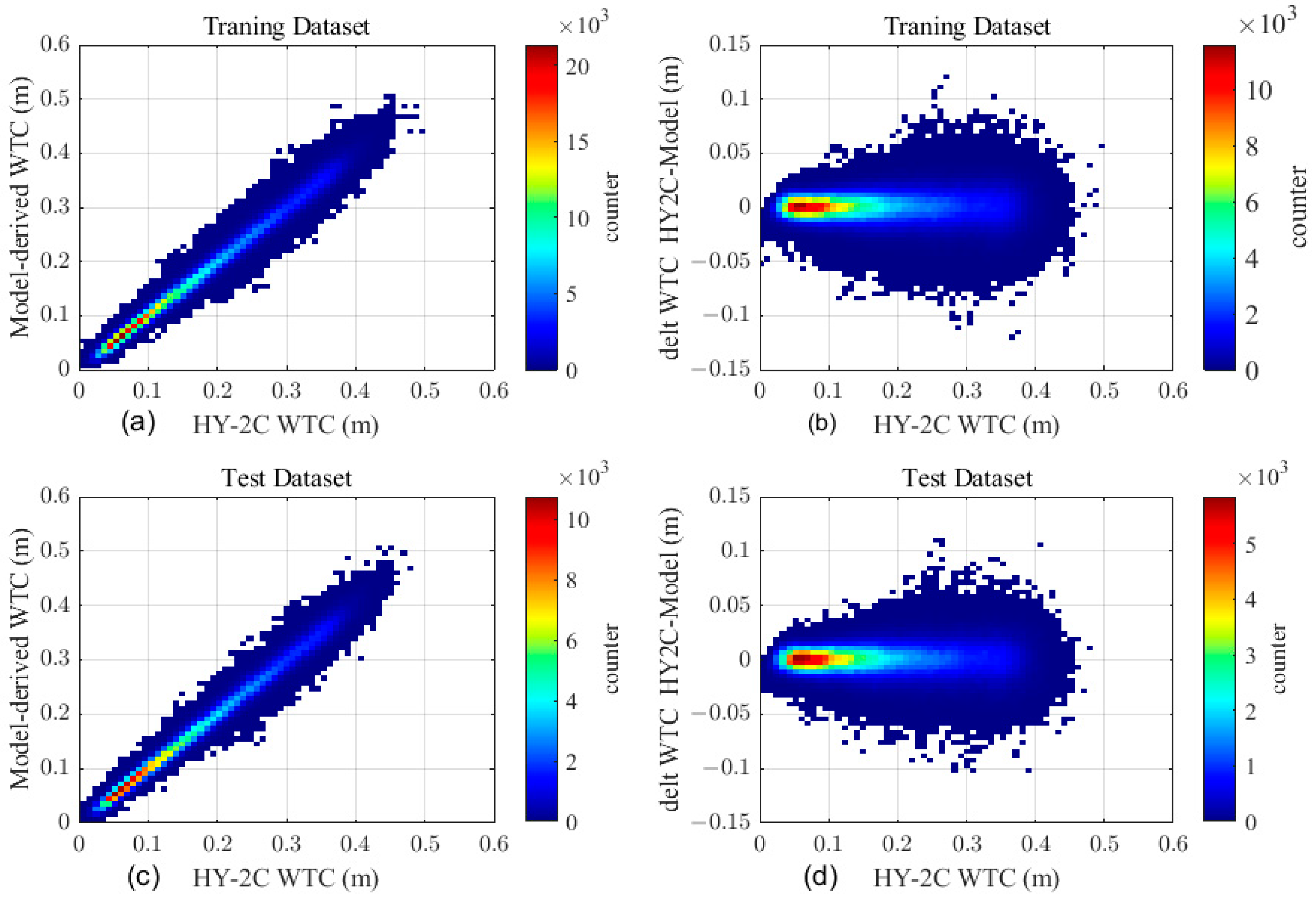
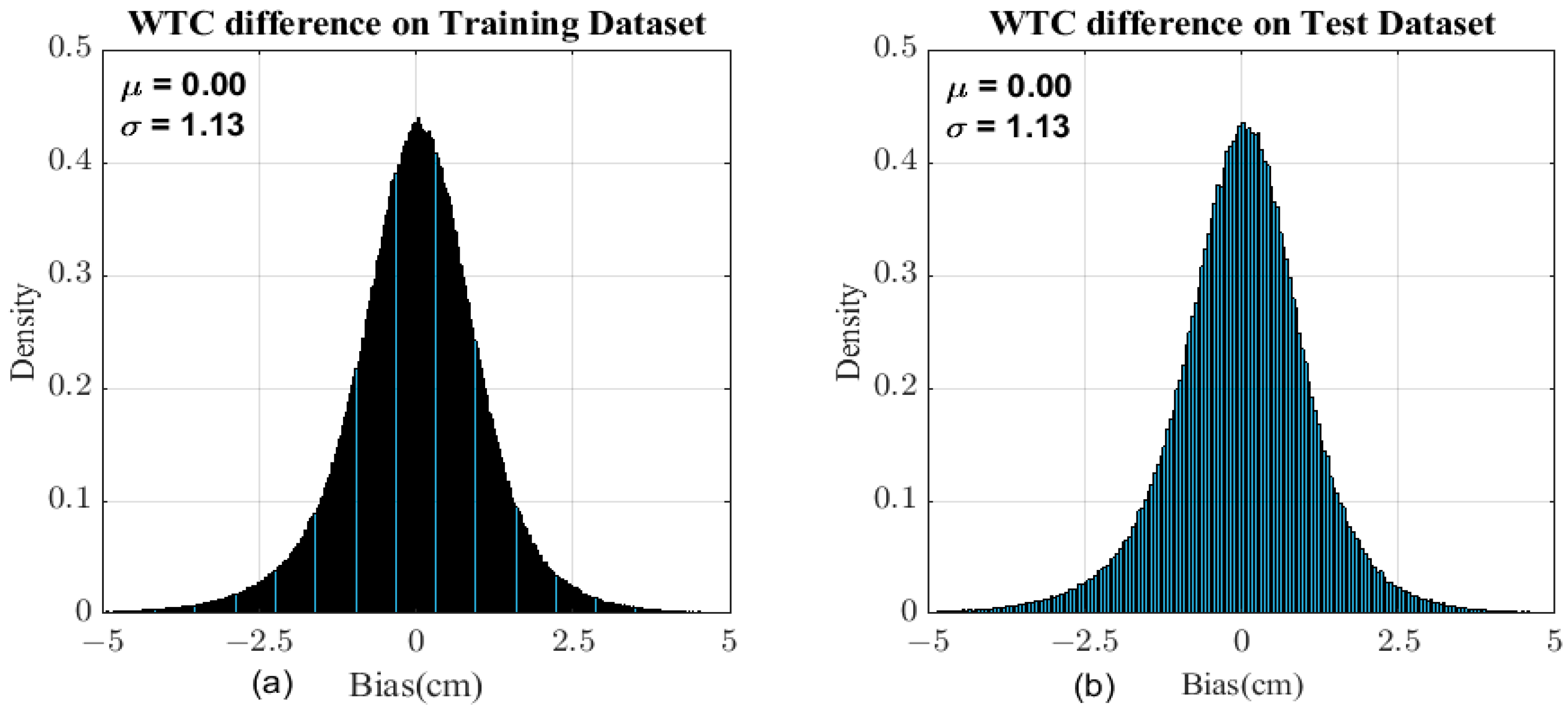
4.2.1. Assessment with the Model-Derived WTC
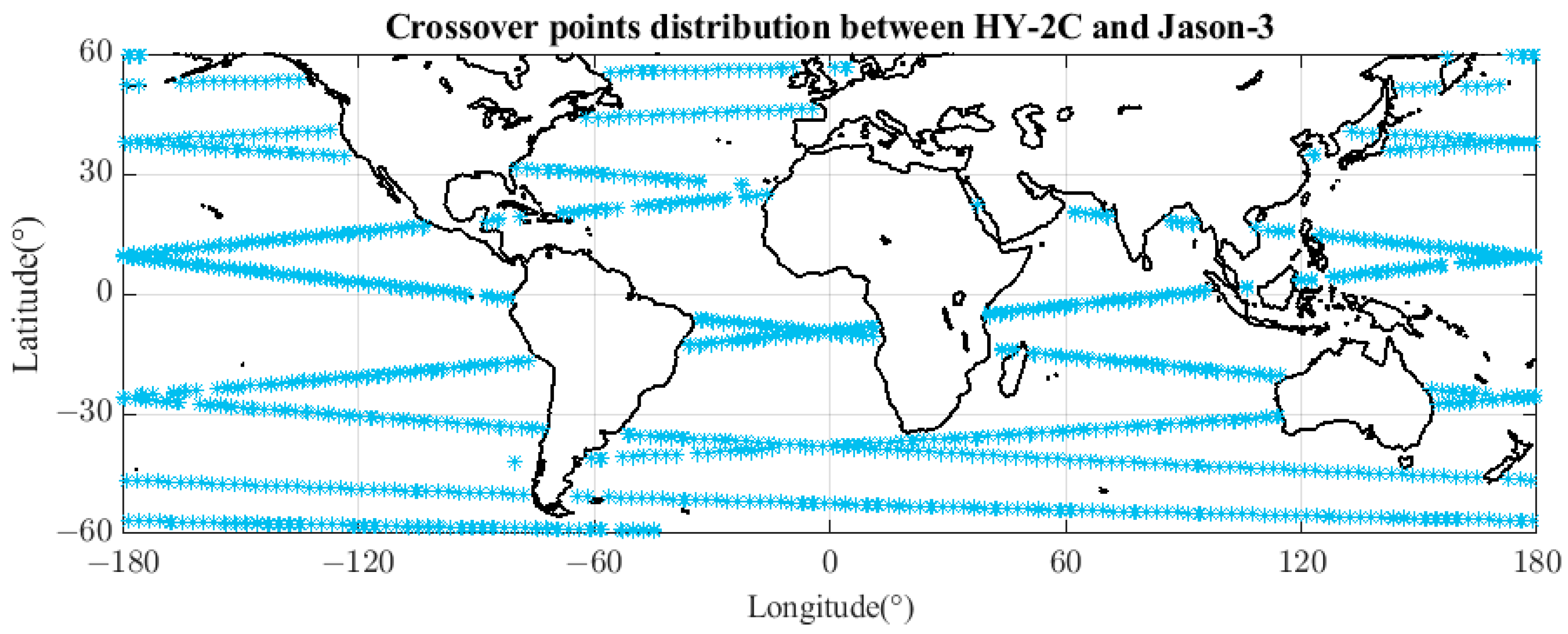
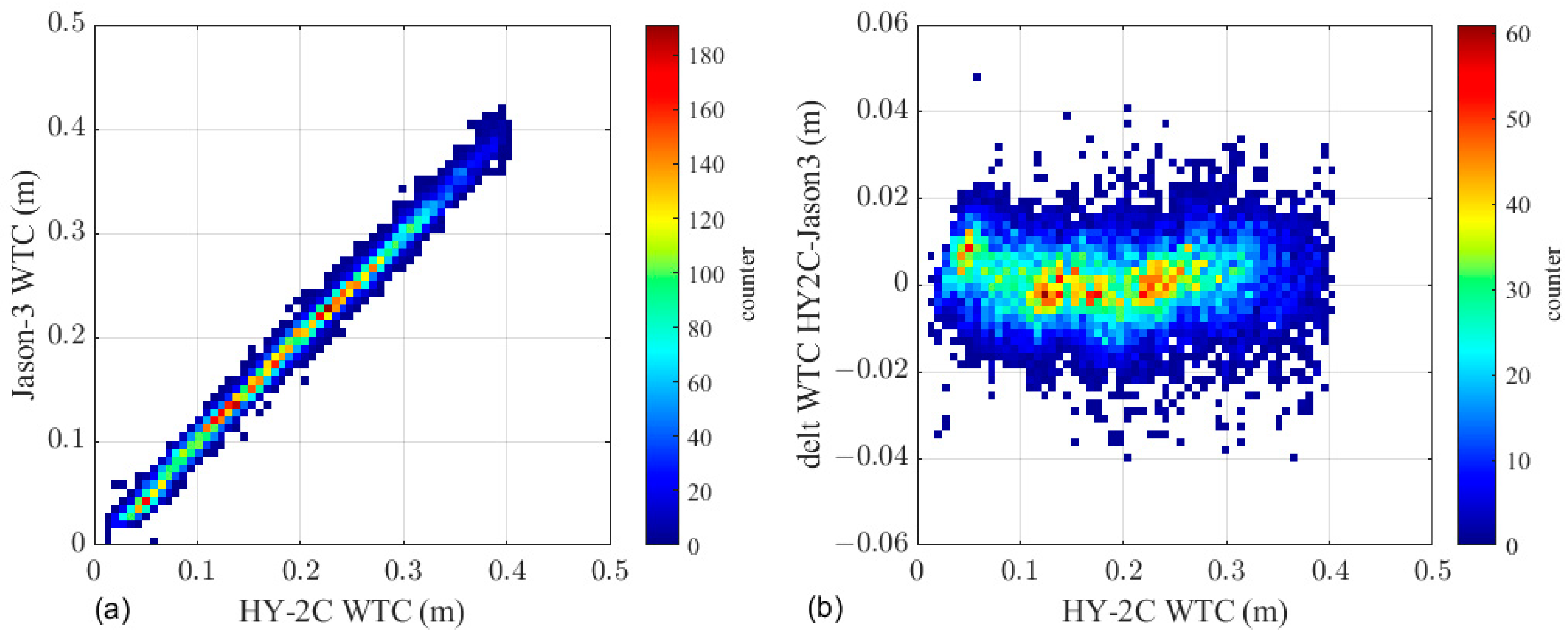
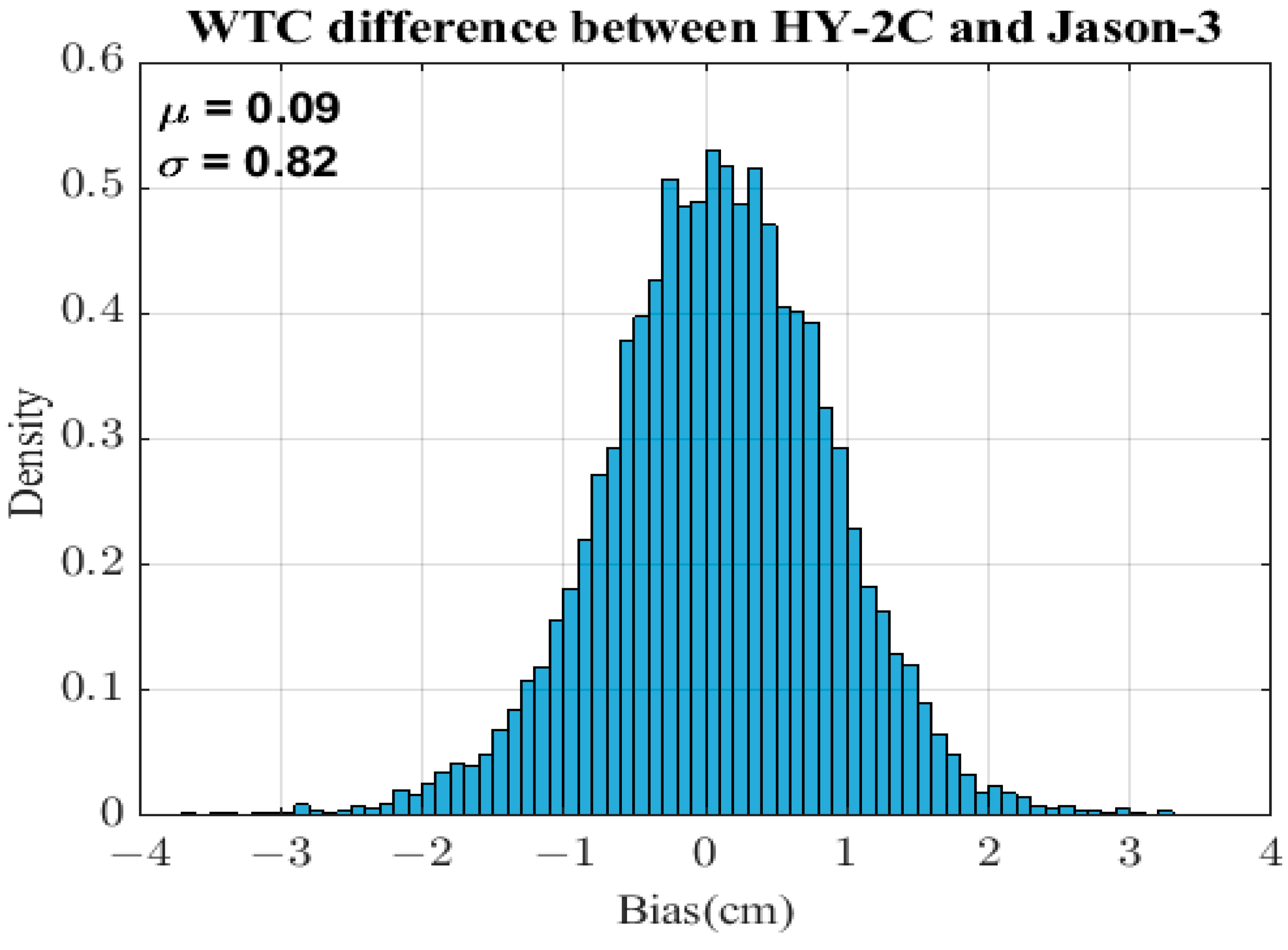
4.2.2. Assessment with the Jason-3 AMR-2 WTC
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Tian, J.; Shi, J. A High-Accuracy and Fast Retrieval Method of Atmospheric Parameters Based on Genetic-BP. IEEE Access 2022, 10, 19458–19468. [Google Scholar] [CrossRef]
- Xu, X.-Y.; Xu, K.; Shen, H.; Liu, Y.-L.; Liu, H.-G. Sea Surface Height and Significant Wave Height Calibration Methodology by a GNSS Buoy Campaign for HY-2A Altimeter. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2016, 9, 5252–5261. [Google Scholar] [CrossRef]
- Chen, C.; Zhu, J.; Ma, C.; Lin, M.; Yan, L.; Huang, X.; Zhai, W.; Mu, B.; Jia, Y. Preliminary calibration results of the HY-2B altimeter’s SSH at China’s Wanshan calibration site. Acta Oceanol. Sin. 2021, 40, 129–140. [Google Scholar] [CrossRef]
- Zheng, X.; Zhang, D.; Zhao, J.; Jiang, M. Brightness Temperature and Wet Tropospheric Correction of HY-2C Calibration Microwave Radiometer Using Model-Derived Wet Troposphere Path Delay from ECMWF. Remote Sens. 2023, 15, 1318. [Google Scholar] [CrossRef]
- Bao, L.; Gao, P.; Peng, H.; Jia, Y.; Shum, C.K.; Lin, M.; Guo, Q. First accuracy assessment of the HY-2A altimeter sea surface height observations: Cross-calibration results. Adv. Space Res. 2015, 55, 90–105. [Google Scholar] [CrossRef]
- Zheng, G.; Yang, J.; Ren, L.; Zhou, W.; Huang, L. The preliminary cross-calibration of the HY-2A calibration microwave radiometer with the Jason-1/2 microwave radiometers. Int. J. Remote Sens. 2014, 35, 4515–4531. [Google Scholar] [CrossRef]
- Wang, Z.; Xiao, Y.; Wang, K.; Zhang, S. Recalibration MWHTS’historical data onboard FY3C based on the response characteristics of microwave radiometer. Natl. Remote Sens. Bull. 2022, 14, 1–11. [Google Scholar] [CrossRef]
- Zhang, C.; Qi, C.; Yang, T.; Gu, M.; Zhang, P.; Lee, L.; Xie, M.; Hu, X. Evaluation of FY-3E/HIRAS-II Radiometric Calibration Accuracy Based on OMB Analysis. Remote Sens. 2022, 14, 3222. [Google Scholar] [CrossRef]
- Brown, S.; Ruf, C.; Keihm, S.; Kitiyakara, A. Jason Microwave Radiometer Performance and On-Orbit Calibration. Mar. Geodesy 2004, 27, 199–220. [Google Scholar] [CrossRef]
- Frery, M.-L.; Siméon, M.; Goldstein, C.; Féménias, P.; Borde, F.; Houpert, A.; Garcia, A.O. Sentinel-3 Microwave Radiometers: Instrument Description, Calibration and Geophysical Products Performances. Remote Sens. 2020, 12, 2590. [Google Scholar] [CrossRef]
- Picard, B.; Frery, M.-L.; Obligis, E.; Eymard, L.; Steunou, N.; Picot, N. SARAL/AltiKa Wet Tropospheric Correction: In-Flight Calibration, Retrieval Strategies and Performances. Mar. Geodesy 2015, 38, 277–296. [Google Scholar] [CrossRef] [Green Version]
- Ruf, C.S.; Keihm, S.J.; Subramanya, B.; Janssen, M.A. TOPEX/POSEIDON microwave radiometer performance and in-flight calibration. J. Geophys. Res. Atmos. 1994, 99, 24915. [Google Scholar] [CrossRef]
- Eymard, L.; Tabary, L.; Gerard, E.; Boukabara, S.; Le Cornec, A. The microwave radiometer aboard ERS-1. II. Validation of the geophysical products. IEEE Trans. Geosci. Remote Sens. 1996, 34, 291–303. [Google Scholar] [CrossRef]
- Fernandes, M.J.; Lázaro, C.; Ablain, M.; Pires, N. Improved wet path delays for all ESA and reference altimetric missions. Remote Sens. Environ. 2015, 169, 50–74. [Google Scholar] [CrossRef] [Green Version]
- Obligis, E.; Eymard, L.; Tran, N.; Labroue, S.; Femenias, P. First Three Years of the Microwave Radiometer aboard Envisat: In-Flight Calibration, Processing, and Validation of the Geophysical Products. J. Atmos. Ocean. Technol. 2006, 23, 802–814. [Google Scholar] [CrossRef]
- Vieira, T.; Fernandes, M.J.; Lázaro, C. An enhanced retrieval of the wet tropospheric correction for Sentinel-3 using dynamic inputs from ERA5. J. Geod. 2022, 96, 28. [Google Scholar] [CrossRef]
- Chakraborty, R.; Maitra, A. Retrieval of atmospheric properties with radiometric measurements using neural network. Atmos. Res. 2016, 181, 124–132. [Google Scholar] [CrossRef]
- Dorigo, M.; Birattari, M. Ant Colony Optimization. In Encyclopedia of Machine Learning and Data Mining; Springer: Berlin/Heidelberg, Germany, 2017; pp. 56–59. [Google Scholar] [CrossRef]
- Kenmedy, J.; Eberhart, R. Particle swarm optimization. In Proceedings of the IEEE International Conference on Neural Networks, Perth, Australia, 27 November–1 December 1995; IEEE: Piscataway, NJ, USA, 1995; pp. 1942–1948. [Google Scholar]
- Mirjalili, S.; Lewis, A. The Whale Optimization Algorithm. Adv. Eng. Softw. 2016, 95, 51–67. [Google Scholar] [CrossRef]
- Hasanien, H.M. Performance improvement of photovoltaic power systems using an optimal control strategy based on whale optimization algorithm. Electr. Power Syst. Res. 2018, 157, 168–176. [Google Scholar] [CrossRef]
- Feng, W.; Deng, B. Global convergence analysis and research on parameter selection of whale optimization algorithm. Control Theory Appl. 2021, 38, 641–651. (In Chinese) [Google Scholar]
- Brown, S.T.; Desai, S.; Lu, W.; Tanner, A. On the Long-Term Stability of Microwave Radiometers Using Noise Diodes for Calibration. IEEE Trans. Geosci. Remote Sens. 2007, 45, 1908–1920. [Google Scholar] [CrossRef]
- Crews, A.; Blackwell, B.; Leslie, V.; Cahoy, K.; DiLiberto, M.; Milstein, A.; Osaretin, I.; Grant, M. Calibration and validation of small satellite passive microwave radiometers: MicroMAS-2A and TROPICS. In Proceedings of the Volume 10788, Active and Passive Microwave Remote Sensing for Environmental Monitoring II; SPIE-International Society for Optics and Photonics: Bellingham, WA, USA, 2018; Volume 35. [Google Scholar] [CrossRef]
- Wang, Z.; Zhang, D.; Li, Y.; Zhao, J. Prelaunch calibration and primary results from in-orbit calibration of the atmospheric correction microwave radiometer (ACMR) on the HY-2A satellite of China. Int. J. Remote Sens. 2014, 35, 4496–4514. [Google Scholar] [CrossRef]
- Obligis, E.; Eymard, L.; Tran, N. A New Sidelobe Correction Algorithm for Microwave Radiometers: Application to the Envisat Instrument. IEEE Trans. Geosci. Remote Sens. 2007, 45, 602–612. [Google Scholar] [CrossRef]
- Available online: https://www.remss.com/measurements/brightness-temperature (accessed on 6 June 2023).
- Bernard, R.; Le Cornec, A.; Eymard, L.; Tabary, L. The microwave radiometer aboard ERS-1.1. Characteristics and performances. IEEE Trans. Geosci. Remote Sens. 1993, 31, 1186–1198. [Google Scholar] [CrossRef]
- Mo, T. AMSU-A antenna pattern corrections. IEEE Trans. Geosci. Remote Sens. 1999, 37, 103–112. [Google Scholar] [CrossRef]
- Janssen, M.; Ruf, C.; Keihm, S. TOPEX/Poseidon Microwave Radiometer (TMR). II. Antenna pattern correction and brightness temperature algorithm. IEEE Trans. Geosci. Remote Sens. 1995, 33, 138–146. [Google Scholar] [CrossRef]
- Okuyama, A.; Imaoka, K. Intercalibration of Advanced Microwave Scanning Radiometer-2 (AMSR2) Brightness Temperature. IEEE Trans. Geosci. Remote Sens. 2015, 53, 4568–4577. [Google Scholar] [CrossRef]
- Obligis, E.; Tran, N.; Eymard, L. An Assessment of Jason-1 Microwave Radiometer Measurements and Products. Mar. Geod. 2004, 27, 255–277. [Google Scholar] [CrossRef]
- Zhang, Z.; Dong, X.; Liu, L.; He, J. Retrieval of Barometric Pressure from Satellite Passive Microwave Observations over the Oceans. J. Geophys. Res. Oceans 2018, 123, 4360–4372. [Google Scholar] [CrossRef]
- Feng, M.; Ai, W.; Lu, W.; Shan, C.; Ma, S.; Chen, G. Sea surface temperature retrieval based on simulated microwave polarimetric measurements of a one-dimensional synthetic aperture microwave radiometer. Acta Oceanol. Sin. 2021, 40, 122–133. [Google Scholar] [CrossRef]
- Crews, A. Calibration and Validation for CubeSat Microwave Radiometers; Massachusetts Institute of Technology: Cambridge, MA, USA, 2019. [Google Scholar]
- Wang, Z.; Zhang, D. Simulation on Retrieving of Atmospheric Wet Path Delay by Microwave Radiometer on HY-2 Satellite. In Proceedings of the 2008 China-Japan Joint Microwave Conference, Shanghai, China, 10–12 September 2008; pp. 665–668. [Google Scholar] [CrossRef]
- Liebe, H.J.; Hufford, G.A.; Cotton, M.G. Propagation modeling of moist air and suspended water/ice particles at frequencies below 1000 GHz. In Proceedings of the AGARD 52nd Specialists Meeting of the Electromagnetic Wave Propagation Panel, Palma de Mallorca, Spain, 17–21 May 1993; pp. 3.1–3.10. [Google Scholar]
- Available online: https://www.ecmwf.int/en/forecasts/dataset/ecmwf-reanalysis-v5 (accessed on 6 June 2023).
- Xi, X.; Gentine, P.; Zhuang, Q.; Kim, S. Evaluating the effects of precipitation and evapotranspiration on soil moisture variability. Purdue Univ. Res. Repos. 2022. [Google Scholar] [CrossRef]
- Greenwald, T.J.; Bennartz, R.; Lebsock, M.; Teixeira, J. An Uncertainty Data Set for Passive Microwave Satellite Observations of Warm Cloud Liquid Water Path. J. Geophys. Res. Atmos. 2018, 123, 3668–3687. [Google Scholar] [CrossRef] [PubMed]
- Bennartz, R.; Watts, P.; Meirink, J.F.; Roebeling, R. Rainwater path in warm clouds derived from combined visible/near-infrared and microwave satellite observations. J. Geophys. Res. Atmos. 2010, 115. [Google Scholar] [CrossRef]
- Keihm, S.; Janssen, M.; Ruf, C. TOPEX/Poseidon microwave radiometer (TMR). III. Wet troposphere range correction algorithm and pre-launch error budget. IEEE Trans. Geosci. Remote Sens. 1995, 33, 147–161. [Google Scholar] [CrossRef]
- Zheng, G.; Yang, J.; Ren, L. Retrieval Models of Water Vapor and Wet Tropospheric Path Delay for the HY-2A Calibration Microwave Radiometer. J. Atmos. Ocean. Technol. 2014, 31, 1516–1528. [Google Scholar] [CrossRef]
- Fernandes, M.J.; Lázaro, C. Independent Assessment of Sentinel-3A Wet Tropospheric Correction over the Open and Coastal Ocean. Remote Sens. 2018, 10, 484. [Google Scholar] [CrossRef] [Green Version]
- Vieira, T.; Fernandes, M.J.; Lázaro, C. Modelling the Altitude Dependence of the Wet Path Delay for Coastal Altimetry Using 3-D Fields from ERA5. Remote Sens. 2019, 11, 2973. [Google Scholar] [CrossRef] [Green Version]
- Jia, Y.; Yang, J.; Lin, M.; Zhang, Y.; Ma, C.; Fan, C. Global Assessments of the HY-2B Measurements and Cross-Calibrations with Jason-3. Remote Sens. 2020, 12, 2470. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Dataset | Channel (GHz) | Method | MD (K) | STD (K) | RMSE (K) | Corr |
|---|---|---|---|---|---|---|
| Training Dataset | 18.7 | APC | −0.87 | 2.85 | 2.98 | 0.98 |
| NN | 0.00 | 1.88 | 1.88 | 0.98 | ||
| 23.8 | APC | −0.37 | 3.39 | 3.41 | 0.99 | |
| NN | 0.00 | 2.36 | 2.36 | 0.99 | ||
| 37 | APC | −0.94 | 6.65 | 6.72 | 0.94 | |
| NN | 0.00 | 3.36 | 3.36 | 0.97 | ||
| Test Dataset 1 | 18.7 | APC | −0.86 | 2.86 | 2.98 | 0.98 |
| NN | 0.00 | 1.88 | 1.88 | 0.98 | ||
| 23.8 | APC | −0.35 | 3.39 | 3.41 | 0.99 | |
| NN | 0.01 | 2.35 | 2.35 | 0.99 | ||
| 37 | APC | −0.91 | 6.65 | 6.71 | 0.94 | |
| NN | 0.01 | 3.37 | 3.37 | 0.97 | ||
| Test Dataset 2 | 18.7 | APC | −0.77 | 2.94 | 3.04 | 0.97 |
| NN | 0.27 | 2.23 | 2.24 | 0.98 | ||
| 23.8 | APC | −0.16 | 3.55 | 3.55 | 0.99 | |
| NN | 0.35 | 2.75 | 2.77 | 0.99 | ||
| 37 | APC | −0.68 | 6.71 | 6.74 | 0.91 | |
| NN | 0.82 | 4.45 | 4.23 | 0.95 |
| WTC Methods | MD (cm) | RMSE (cm) | Corr | R2 |
|---|---|---|---|---|
| Model-derived (training dataset) | 0.00 | 1.13 | 0.9932 | 0.9864 |
| Model-derived (test dataset) | 0.00 | 1.13 | 0.9932 | 0.9865 |
| Jason-3 | 0.09 | 0.82 | 0.9959 | 0.9918 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zheng, X.; Zhang, D.; Zhao, J.; Jiang, M. On-Orbit Calibration and Wet Tropospheric Correction of HY-2C Correction Microwave Radiometer. Remote Sens. 2023, 15, 3633. https://doi.org/10.3390/rs15143633
Zheng X, Zhang D, Zhao J, Jiang M. On-Orbit Calibration and Wet Tropospheric Correction of HY-2C Correction Microwave Radiometer. Remote Sensing. 2023; 15(14):3633. https://doi.org/10.3390/rs15143633
Chicago/Turabian StyleZheng, Xiaomeng, Dehai Zhang, Jin Zhao, and Maofei Jiang. 2023. "On-Orbit Calibration and Wet Tropospheric Correction of HY-2C Correction Microwave Radiometer" Remote Sensing 15, no. 14: 3633. https://doi.org/10.3390/rs15143633
APA StyleZheng, X., Zhang, D., Zhao, J., & Jiang, M. (2023). On-Orbit Calibration and Wet Tropospheric Correction of HY-2C Correction Microwave Radiometer. Remote Sensing, 15(14), 3633. https://doi.org/10.3390/rs15143633