
Application of a Randomized Algorithm for Extracting a Shallow Low-Rank Structure in Low-Frequency Reverberation


Abstract
:
1. Introduction
1.1. Notations
- c, : minimum sound velocity in the water column, the sound velocity of seabed sediment.
- , , : width of the elliptical ring, area increment of bottom scattering, increment of polar angle.
- e: base of the natural logarithm.
- : distribution of RWI.
- : expectation of .
- f, : frequency point, interference frequency of mode m and .
- , : scattering amplitude of mode m and n at polar angle , scattering amplitude of mode m and n.
- i: square root of .
- , , : reverberation intensity, reverberation intensity matrix, mean value of reverberation intensity matrix.
- , , , : q-th ping of reverberation intensity, low-rank structure, sparse signal, and residual signal.
- j: iteration index in the algorithms.
- , , , : horizontal wavenumbers (eigenvalues) of different modes.
- : focal length of an ellipse.
- : low-rank matrix without the ping number (each ping is the same).
- m, , n, : mode numbers.
- , : maximum value of , minimum value of .
- N: total number of modes.
- p: oversampling the dimension parameter.
- , : reverberation pressure at polar angle , total reverberation pressure.
- , : retain the first k-largest absolute entries of a matrix and set other entries to zero (k-largest non-negative projection on matrix domain), hard threshold operator with threshold on the entries of a matrix .
- q, : index of the power scheme in the paper, index of reverberation pings.
- Q: total number of reverberation pings.
- ,: unitary\orthogonal matrix of QR decomposition.
- r, , , : rank of a matrix, the horizontal distance of monostatic reverberation, the horizontal distance from scatters to the receiver of bistatic reverberation, the horizontal distance from the source to the scatters of bistatic reverberation.
- : real field.
- , : upper triangular matrix of QR decomposition.
- : element of random amplitude in the scattering matrix.
- , : rank of a matrix , number of non-zero elements in a matrix .
- : soft threshold operator for with threshold .
- t, : reverberation time, maximum iterations.
- : element of the random scattering matrix without area term.
- , , , , , : unitary\orthogonal matrix of SVD.
- , : vectorization of a matrix , matricization of a vector .
- , , , : input matrix, low-rank matrix, sparse matrix, residual matrix.
- , , : depth of the source, depth of the receiver, depth of the bottom.
- : random variable with uniform distribution in at reverberation time t.
- , , : constants of Lambert amplitude.
- : sound absorption coefficient.
- : value of RWI.
- , : circular similarity of the ellipse at polar angle , bottom density.
- , , : polar angle, grazing angle of mode m, grazing angle of mode n.
- : hard threshold parameter.
- , , : diagonal matrix of SVD.
- : width of the transmitted pulse.
- : error margin.
- , , , : eigenfunctions of different depths and mode numbers.
- : Frobenius norm of a matrix .
- , , , : complex conjugation of , transpose\Hermitian transpose of a real\complex matrix , inverse of , Moore–Penrose inverse of a matrix .
- : ensemble operation.
2. Theoretical Basis of Seabed Distant Reverberation
2.1. Reverberation Model

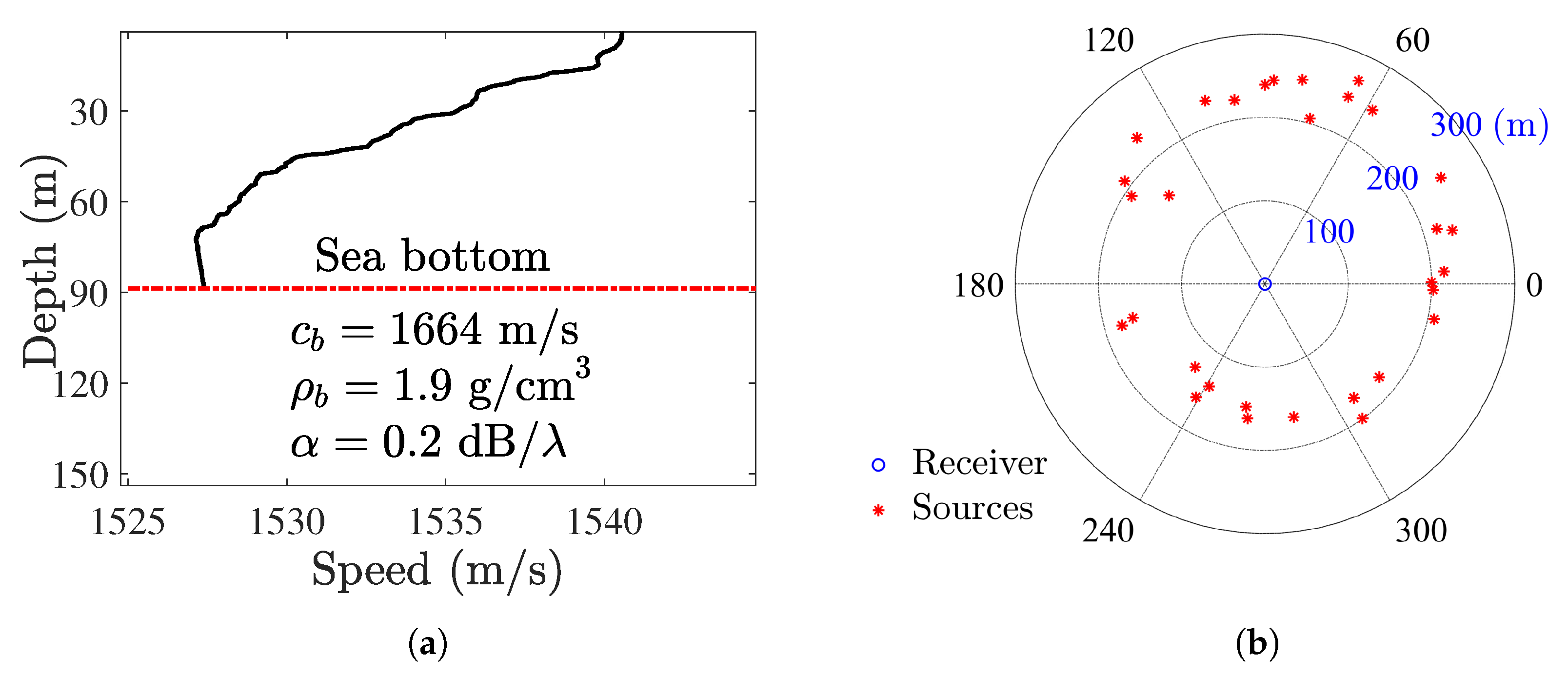
2.2. Simulations of Low-Frequency Bottom Reverberation
3. Randomized Algorithms and Signal Separation
3.1. Randomized Form of Low-Rank Approximation
| Algorithm 1 BRP with the power scheme |
| Input: , standard Gaussian matrix , r, q Output: low-rank matrix of rank r
|
| Algorithm 2 SOR-SVD with power scheme |
| Input: , standard Gaussian matrix , p, r, q Output: low-rank matrix of rank p, rank-r approximate SVD of
|
3.2. Algorithms of Signal Separation
| Algorithm 3 Original Go decomposition |
| Input: , standard Gaussian matrix , r, q, k, , Output: low-rank matrix , sparse matrix , residual matrix
|
| Algorithm 4 Go-SOR decomposition |
| Input: , standard Gaussian matrix , r, q, k, , Output: low-rank matrix , sparse matrix , residual matrix
|
| Algorithm 5 ALM-SOR-SVD RPCA |
| Input: , standard Gaussian matrix , p, r, q, , Output: low-rank matrix , sparse-plus-noise matrix
|
4. Results
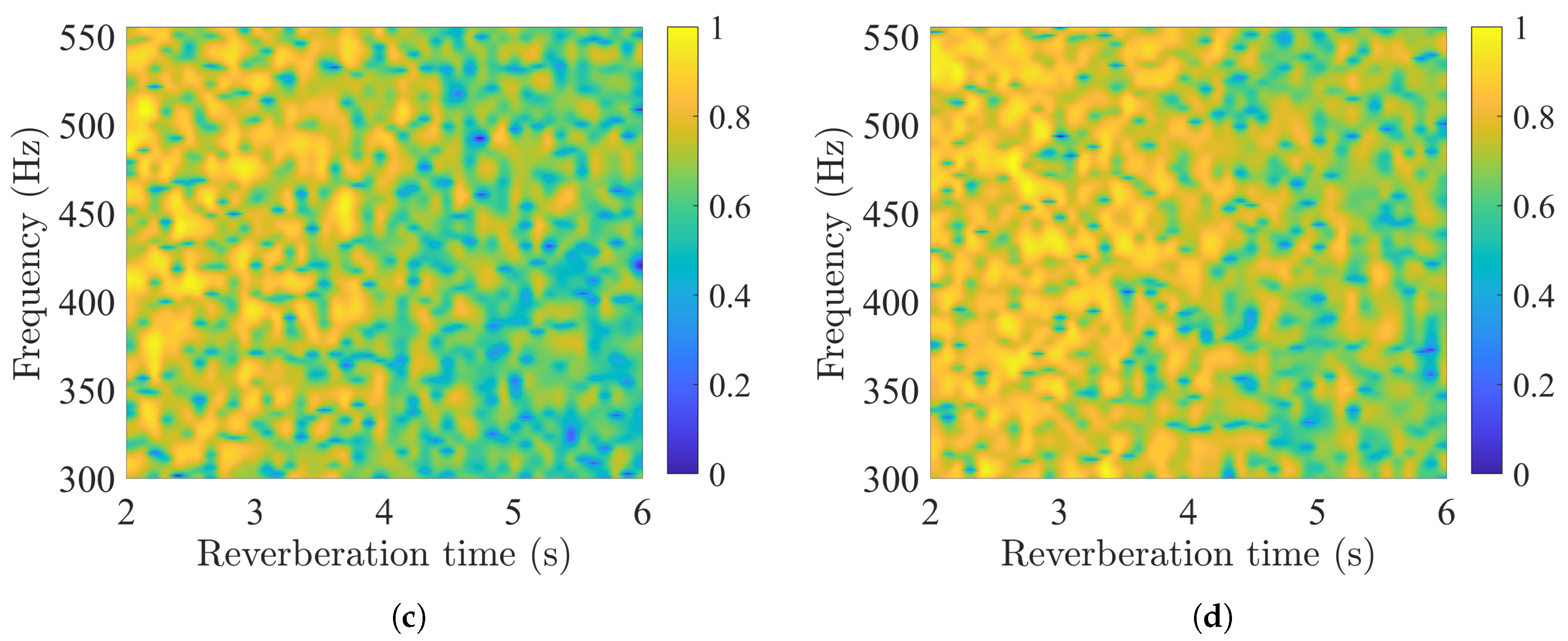
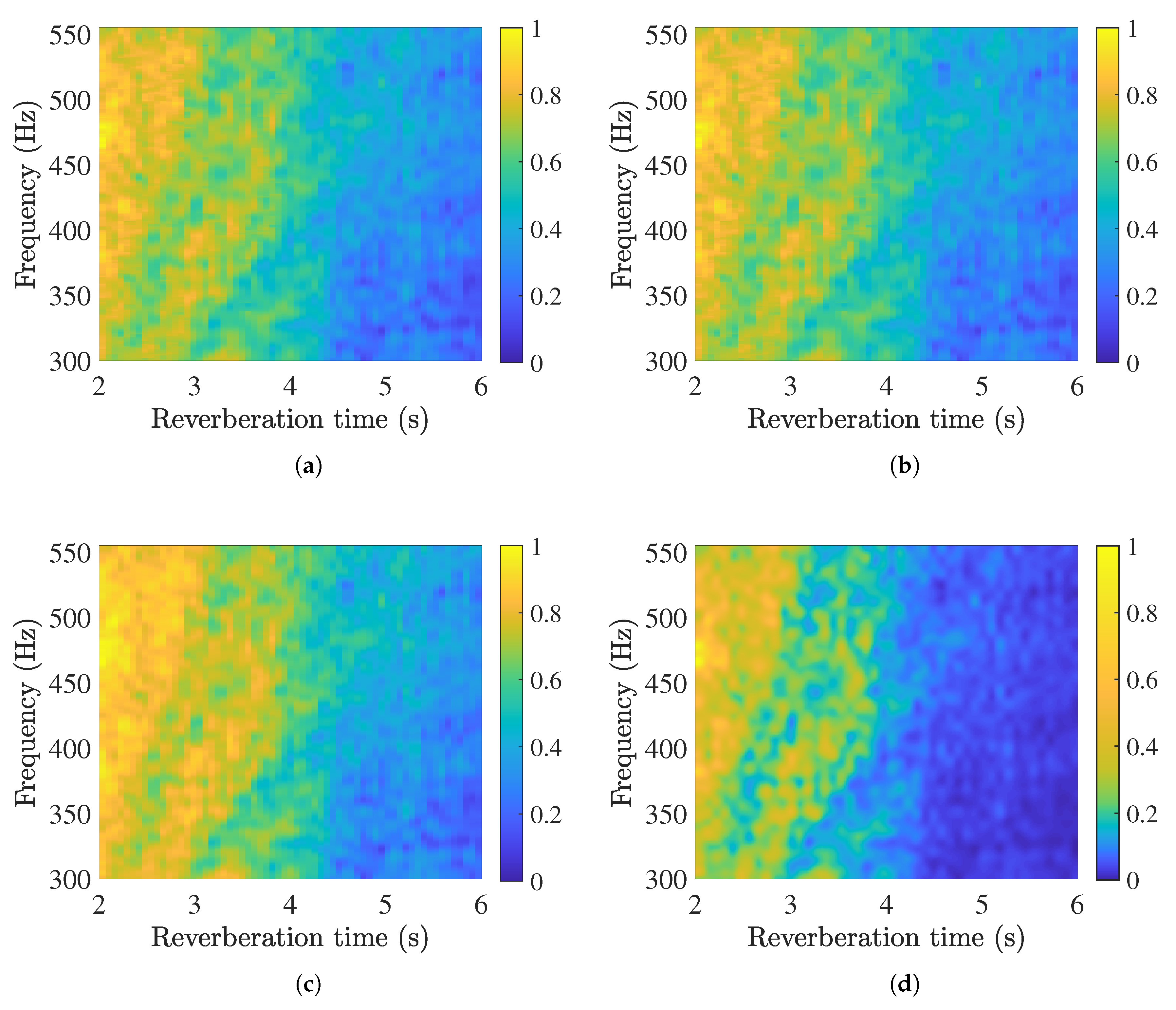
4.1. Low-Rank Structure of the Shallow Reverberation Experiment
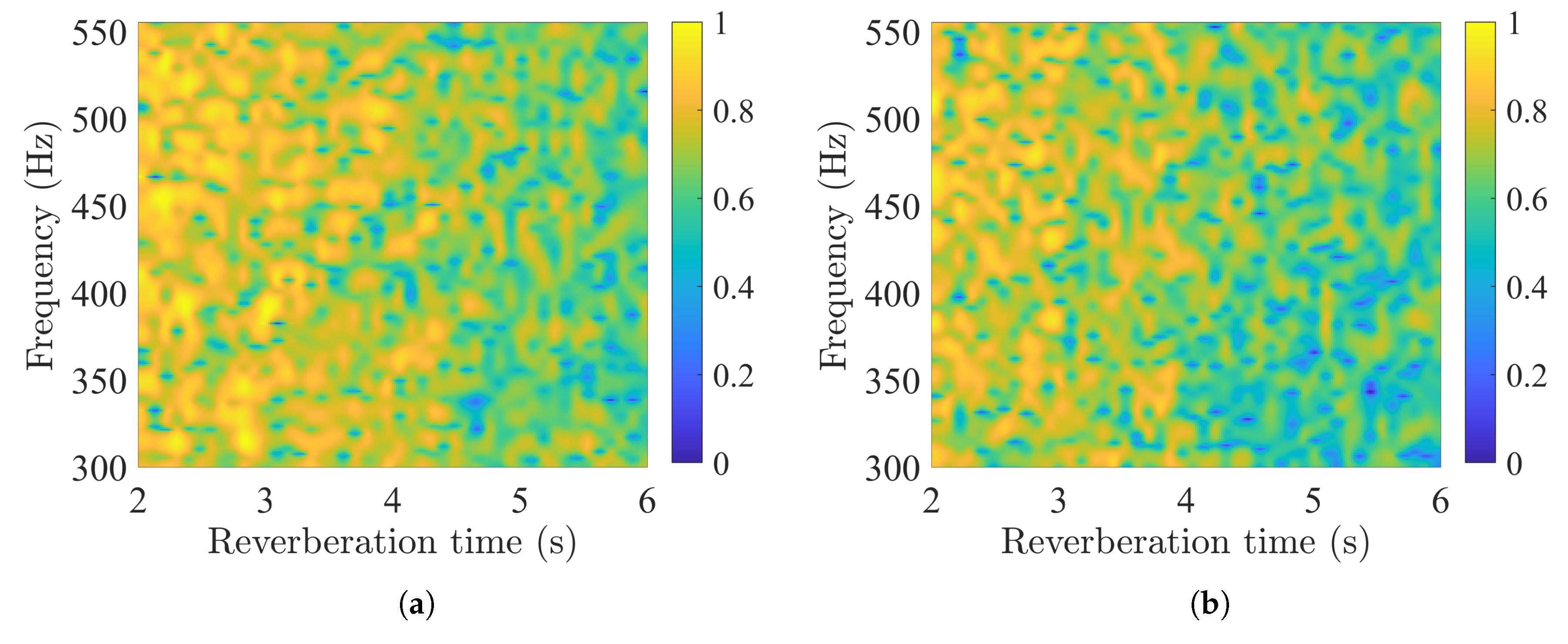
4.2. Uniformity of RIS, Mean LOFARgram, and Low-Rank Structure
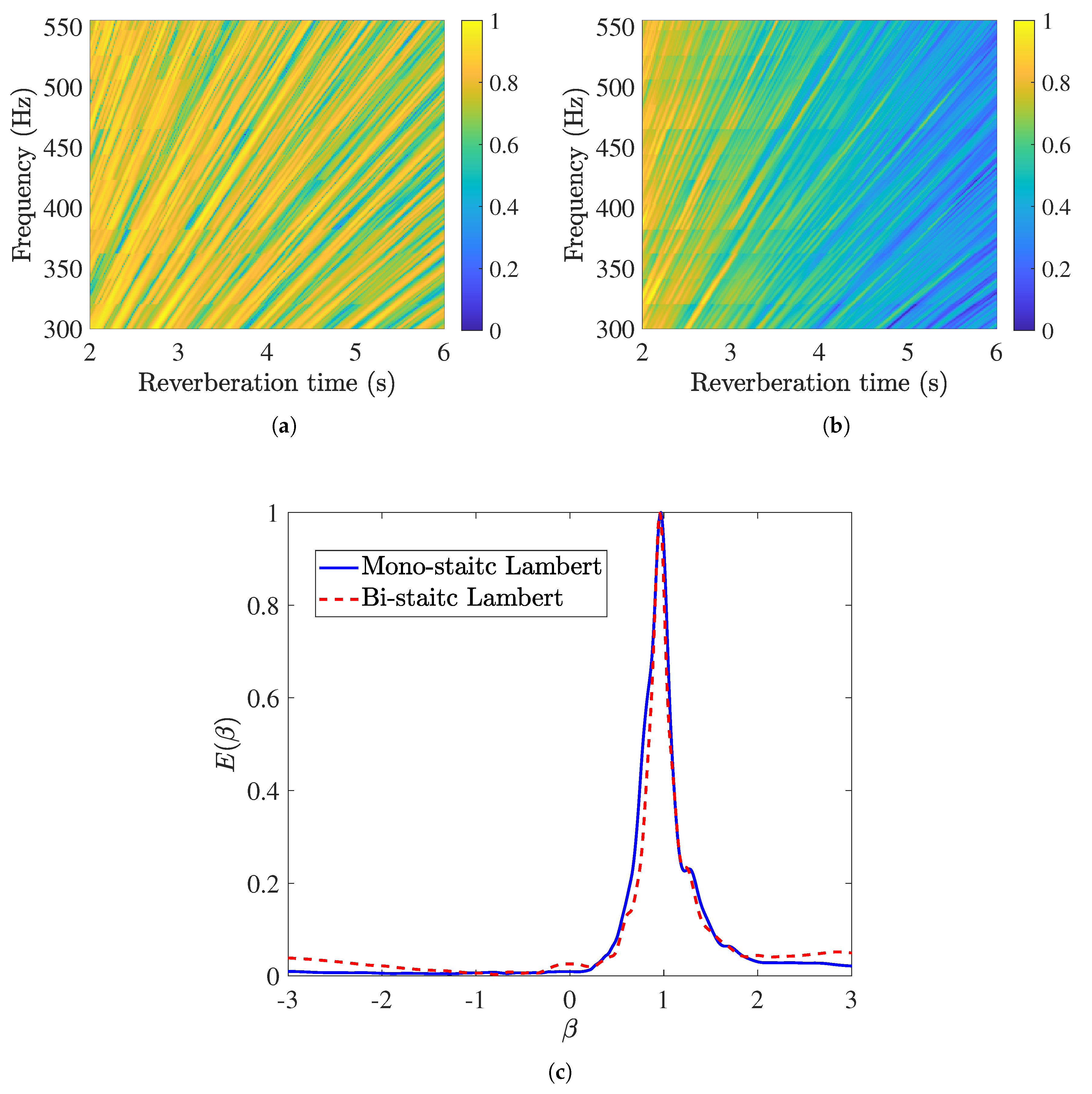
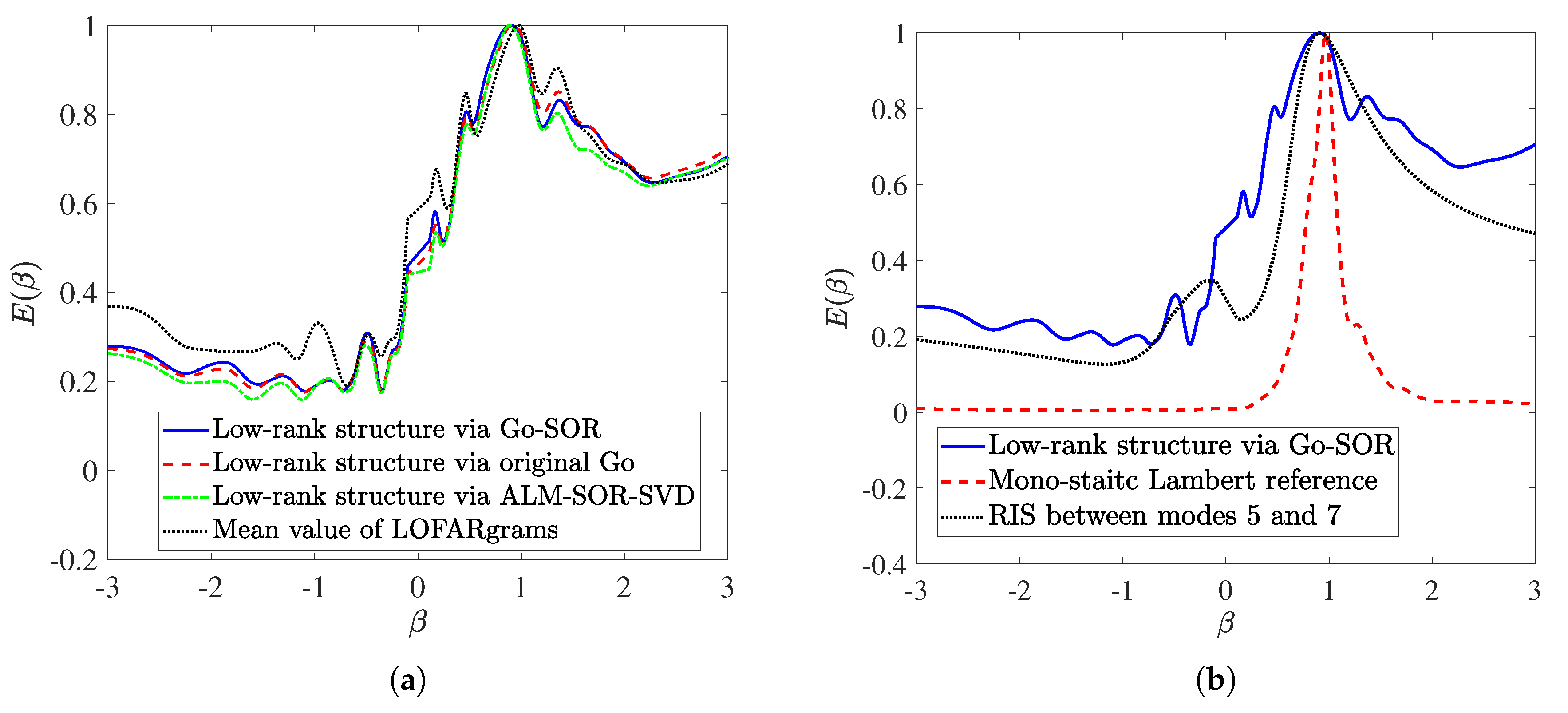
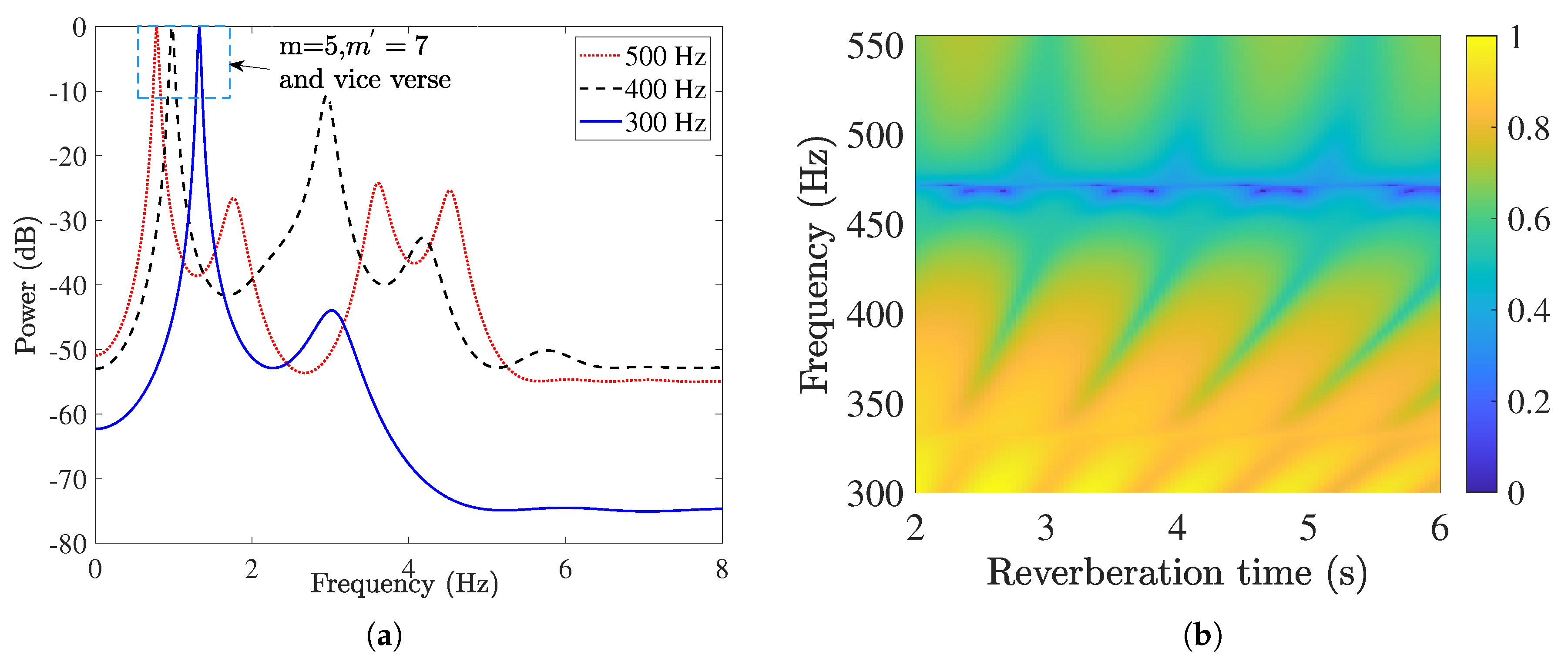
4.3. Interference Properties of the Low-Rank Structure
5. Discussion
- A novel signal separation technique, named Go-SOR, was proposed and evaluated for processing reverberation experimental data. The results show that Go-SOR outperforms the SOTA algorithm ALM-SRO-SVD RPCA in terms of the computing time and definition index. Furthermore, we established the conditional equivalence of low-rank approximation between the SOR-SVD of the proposed algorithm and the BRP of the original Go algorithm.
- A bistatic low-frequency reverberation simulation model based on the normal mode theory was developed. When the transition indicator circular similarity is , the model can be transformed into a monostatic distant seabed reverberation model.
- The equivalence between the low-rank structure by the proposed algorithm and RIS was described, which provides the interpretability of the algorithm’s processing results. Our findings suggest that the study of RIS can be transformed into the study of the low-rank structure reverberation obtained from the data. This provides the possibility for the study of the data-driven RIS and other methods based on the data-driven RWI, and facilitates the acquisition of the dominant modes of the experimental sea area from the data.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A. Calculation of E(β) by the Two-Dimensional Fourier Transform
Appendix B. Equivalence of BRP- and SOR–SVD-Based Low-Rank Approximations
Appendix C. The Proof of Equation (A6)
References
- Yang, S.E. Theory of Underwater Sound Propagation; Harbin Engineering University Press: Harbin, China, 2009. [Google Scholar]
- Holland, C.W.; Ellis, D.D. Clutter from non-discrete seabed structures. J. Acoust. Soc. Am. 2012, 131, 4442–4449. [Google Scholar] [CrossRef] [PubMed]
- Pang, J.; Gao, B.; Song, W.; Zuo, Y.; Mo, D. A Coupled Mode Reverberation Theory for Clutter Induced by Inhomogeneous Water Columns in Shallow Sea. In Proceedings of the 2021 OES China Ocean Acoustics (COA), Harbin, China, 14–17 July 2021; pp. 526–529. [Google Scholar] [CrossRef]
- Li, X.; Zhi, X. Research of underwater bottom object and reverberation in feature space. J. Mar. Sci. Appl. 2013, 12, 235–239. [Google Scholar] [CrossRef]
- Yu, G.; Piao, S. Multiple Moving Targets Detection and Parameters Estimation in Strong Reverberation Environments. Shock Vib. 2016, 2016, 5274371. [Google Scholar] [CrossRef]
- Yu, G.; Yang, T.C.; Piao, S. Estimating the delay-Doppler of target echo in a high clutter underwater environment using wideband linear chirp signals: Evaluation of performance with experimental data. J. Acoust. Soc. Am. 2017, 142, 2047–2057. [Google Scholar] [CrossRef]
- Zhu, Y.; Yang, K.; Duan, R.; Wu, F. Sparse spatial spectral estimation with heavy sea bottom reverberation in the fractional fourier domain. Appl. Acoust. 2020, 160, 107132. [Google Scholar] [CrossRef]
- Wall, M.E.; Rechtsteiner, A.; Rocha, L.M. Singular Value Decomposition and Principal Component Analysis. In A Practical Approach to Microarray Data Analysis; Springer: Boston, MA, USA, 2003. [Google Scholar]
- Huang, N.E.; Shen, Z.; Long, S.R.; Wu, M.C.; Shih, H.H.; Zheng, Q.; Yen, N.C.; Tung, C.C.; Liu, H.H. The empirical mode decomposition and the Hilbert spectrum for nonlinear and non-stationary time series analysis. Proc. Math. Phys. Eng. Sci. 1998, 454, 903–995. [Google Scholar] [CrossRef]
- Wu, Z.; Huang, N.E. Ensemble empirical mode decomposition: A noise-assisted data analysis method. Adv. Adapt. Data Anal. 2009, 1, 1–41. [Google Scholar] [CrossRef]
- Dragomiretskiy, K.; Zosso, D. Variational Mode Decomposition. IEEE Trans. Signal Process. 2014, 62, 531–544. [Google Scholar] [CrossRef]
- Schmid, P.J.; Sesterhenn, J. Dynamic mode decomposition of numerical and experimental data. J. Fluid Mech. 2010, 656, 5–28. [Google Scholar] [CrossRef] [Green Version]
- Zare, M.; Nouri, N.M. A novel hybrid feature extraction approach of marine vessel signal via improved empirical mode decomposition and measuring complexity. Ocean Eng. 2023, 271, 113727. [Google Scholar] [CrossRef]
- Fan, G.; Yu, P.; Wang, Q.; Dong, Y. Short-term motion prediction of a semi-submersible by combining LSTM neural network and different signal decomposition methods. Ocean Eng. 2023, 267, 113266. [Google Scholar] [CrossRef]
- Goldhahn, R.; Hickman, G.; Krolik, J.L. Waveguide Invariant Reverberation Mitigation for Active Sonar. In Proceedings of the IEEE International Conference on Acoustics, Honolulu, HI, USA, 15–20 April 2007. [Google Scholar]
- Goldhahn, R.; Hickman, G.; Krolik, J. Waveguide invariant broadband target detection and reverberation estimation. J. Acoust. Soc. Am. 2008, 124, 2841–2851. [Google Scholar] [CrossRef]
- Li, Y.Q.; Li, J.P.; Han, L. A Fast Sea Interface Reverberation Suppression Method Based on Unitary Transformation. In Proceedings of the 2010 International Conference on Digital Manufacturing and Automation, Changcha, China, 18–20 December 2010; Volume 1, pp. 3–6. [Google Scholar] [CrossRef]
- Xu, L.Y.; Liao, B.; Zhang, H.; Xiao, P.; Huang, J.J. Acoustic localization in ocean reverberation via matrix completion with sensor failure. Appl. Acoust. 2021, 173, 107681. [Google Scholar] [CrossRef]
- Kim, G.; Lee, K.; Lee, S. Linear Frequency Modulated Reverberation Suppression Using Non-negative Matrix Factorization Methods, Dechirping Transformation and Modulo Operation. IEEE Access 2020, 8, 110720–110737. [Google Scholar] [CrossRef]
- Jia, H.; Li, X. Underwater reverberation suppression based on non-negative matrix factorisation. J. Sound Vib. 2021, 506, 116166. [Google Scholar] [CrossRef]
- Candès, E.J.; Li, X.; Ma, Y.; Wright, J. Robust Principal Component Analysis? J. ACM 2011, 58, 1–37. [Google Scholar] [CrossRef]
- Zhou, T.; Tao, D. Godec: Randomized low-rank & sparse matrix decomposition in noisy case. In Proceedings of the 28th International Conference on Machine Learning, ICML 2011, Bellevue, WA, USA, 28 June–2 July 2011. [Google Scholar]
- Nie, R.; Liu, X.; Sun, C.; Zhou, Y. Multi-ping Reverberation Suppression Combined with Spatial Continuity of Target Motion. In Proceedings of the 2021 OES China Ocean Acoustics (COA), Harbin, China, 14–17 July 2021; pp. 689–693. [Google Scholar] [CrossRef]
- Liu, B.; Yin, J.; Zhu, G.; Guo, L. A target detection method in reverberation environment based on stochastic algorithm. J. Harbin Eng. Univ. 2020, 41, 277–281. [Google Scholar]
- Yin, J.; Liu, B.; Zhu, G.; Guo, L. A method of underwater target detection via nonnegative matrix factorization. In Proceedings of the 2019 IEEE International Conference on Signal, Information and Data Processing (ICSIDP), Chongqing, China, 11–13 December 2019; pp. 1–4. [Google Scholar] [CrossRef]
- Huang, H.; Zou, M.S.; Jiang, L.W. Study on the integrated calculation method of fluid-structure interaction vibration, acoustic radiation, and propagation from an elastic spherical shell in ocean acoustic environments. Ocean Eng. 2019, 177, 29–39. [Google Scholar] [CrossRef]
- Liu, J.Y.; Huang, C.F.; Shyue, S.W. Effects of seabed properties on acoustic wave fields in a seismo-acoustic ocean waveguide. Ocean Eng. 2001, 28, 1437–1459. [Google Scholar] [CrossRef]
- He, T.; Wang, B.; Mo, S.; Fang, E. Predicting range-dependent underwater sound propagation from structural sources in shallow water using coupled finite element/equivalent source computations. Ocean Eng. 2023, 272, 113904. [Google Scholar] [CrossRef]
- Song, H.; Cho, C.; Hodgkiss, W.; Nam, S.; Kim, S.M.; Kim, B.N. Underwater sound channel in the northeastern East China Sea. Ocean Eng. 2018, 147, 370–374. [Google Scholar] [CrossRef]
- Lepage, K.D.; Mcdonald, B.E. Environmental Effects of Waveguide Uncertainty on Coherent Aspects of Propagation, Scattering, and Reverberation. IEEE J. Ocean. Eng. 2006, 31, 413–420. [Google Scholar] [CrossRef]
- Grigor’ev, V.; Kuz’kin, V.; Petnikov, B. Low-frequency bottom reverberation in shallow-water ocean regions. Acoust. Phys. 2004, 50, 37–45. [Google Scholar] [CrossRef]
- Gao, B.; Pang, J.; Li, X.; Song, W.; Gao, W. Recovering reverberation interference striations by a conditional generative adversarial network. JASA Express Lett. 2021, 1, 056001. [Google Scholar] [CrossRef]
- Yu, S.; Liu, B.; Yu, K.; Yang, Z.; Kan, G.; Zhang, X. Comparison of acoustic backscattering from a sand and a mud bottom in the South Yellow Sea of China. Ocean Eng. 2020, 202, 107145. [Google Scholar] [CrossRef]
- Middleton, D. New physical-statistical methods and models for clutter and reverberation: The KA-distribution and related probability structures. IEEE J. Ocean. Eng. 1999, 24, 261–284. [Google Scholar] [CrossRef]
- Rouseff, D. Effect of shallow water internal waves on ocean acoustic striation patterns. Waves Random Media 2001, 11, 377. [Google Scholar] [CrossRef]
- Eckart, C.; Young, G. The approximation of one matrix by another of lower rank. Psychometrika 1936, 1, 211–218. [Google Scholar] [CrossRef]
- Johnson, W.B. Extensions of Lipschitz mappings into a Hilbert space. Contemp. Math. 1984, 26, 189–206. [Google Scholar]
- Halko, N.; Martinsson, P.G.; Tropp, J.A. Finding structure with randomness: Probabilistic algorithms for constructing approximate matrix decompositions. SIAM Rev. 2011, 53, 217–288. [Google Scholar] [CrossRef] [Green Version]
- Gu, M. Subspace iteration randomization and singular value problems. SIAM J. Sci. Comput. 2015, 37, A1139–A1173. [Google Scholar] [CrossRef] [Green Version]
- Kaloorazi, M.F.; de Lamare, R.C. Subspace-orbit-randomized decomposition for low-rank matrix approximations. IEEE Trans. Signal Process. 2018, 66, 4409–4424. [Google Scholar] [CrossRef] [Green Version]
- Fazel, M.; Candes, E.; Recht, B.; Parrilo, P. Compressed sensing and robust recovery of low rank matrices. In Proceedings of the 2008 42nd Asilomar Conference on Signals, Systems and Computers, Pacific Grove, CA, USA, 26–29 October 2008; pp. 1043–1047. [Google Scholar]
- Zhou, T.; Tao, D. Bilateral random projections. In Proceedings of the 2012 IEEE International Symposium on Information Theory Proceedings, Cambridge, MA, USA, 1–6 July 2012; pp. 1286–1290. [Google Scholar]
- Zhou, T.; Tao, D. Shifted subspaces tracking on sparse outlier for motion segmentation. In Proceedings of the Twenty-Third International Joint Conference on Artificial Intelligence, Citeseer, Beijing, China, 3–9 August 2013. [Google Scholar]
- Subbarao, M.; Choi, T.S.; Nikzad, A. Focusing Techniques. Opt. Eng. 1993, 32, 2824–2836. [Google Scholar] [CrossRef]
- Subbarao, M.; Tyan, J.K. Selecting the optimal focus measure for autofocusing and depth-from-focus. IEEE Trans. Pattern Anal. Mach. Intell. 1998, 20, 864–870. [Google Scholar] [CrossRef] [Green Version]
- Grimmett, G.; Stirzaker, D. Probability and Random Processes; Oxford University Press: Oxford, UK, 2020. [Google Scholar]
- Schmidt, R. Multiple emitter location and signal parameter estimation. IEEE Trans. Antennas Propag. 1986, 34, 276–280. [Google Scholar] [CrossRef] [Green Version]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Ping Number | 1 | 11 | 21 | 31 |
|---|---|---|---|---|
| 1 | - | 0.0845 | 0.1396 | 0.1030 |
| 11 | 0.0845 | - | 0.1002 | 0.0860 |
| 21 | 0.1396 | 0.1002 | - | 0.1080 |
| 31 | 0.1030 | 0.0860 | 0.1080 | - |
| Algorithms | Go-SOR | Original Go | ALM-SOR-SVD RPCA |
|---|---|---|---|
| Computing time (s) | 0.44 | 55.20 | 0.76 |
| Go-SOR | Original Go | ALM-SOR-SVD RPCA | |
|---|---|---|---|
| EOG | 1 | 0.8352 | 0.9100 |
| Tenengrad | 1 | 0.8398 | 0.9304 |
| Brenner | 1 | 0.7472 | 0.6825 |
| Laplacian | 1 | 0.8406 | 0.8974 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pang, J.; Gao, B. Application of a Randomized Algorithm for Extracting a Shallow Low-Rank Structure in Low-Frequency Reverberation. Remote Sens. 2023, 15, 3648. https://doi.org/10.3390/rs15143648
Pang J, Gao B. Application of a Randomized Algorithm for Extracting a Shallow Low-Rank Structure in Low-Frequency Reverberation. Remote Sensing. 2023; 15(14):3648. https://doi.org/10.3390/rs15143648
Chicago/Turabian StylePang, Jie, and Bo Gao. 2023. "Application of a Randomized Algorithm for Extracting a Shallow Low-Rank Structure in Low-Frequency Reverberation" Remote Sensing 15, no. 14: 3648. https://doi.org/10.3390/rs15143648
APA StylePang, J., & Gao, B. (2023). Application of a Randomized Algorithm for Extracting a Shallow Low-Rank Structure in Low-Frequency Reverberation. Remote Sensing, 15(14), 3648. https://doi.org/10.3390/rs15143648