
Optimizing the Spatial Structure of Metasequoia Plantation Forest Based on UAV-LiDAR and Backpack-LiDAR



Abstract
:1. Introduction
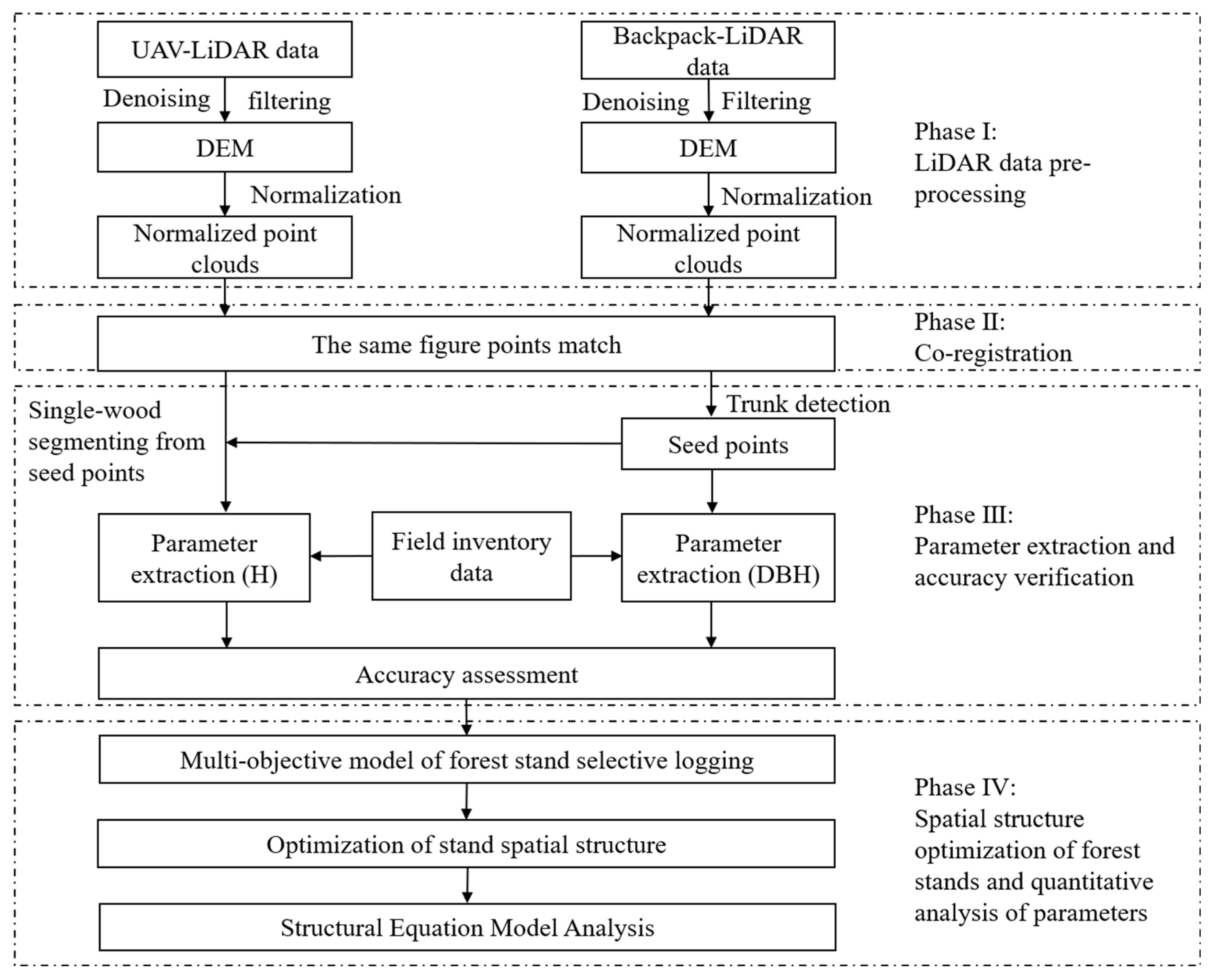
2. Materials and Methods
2.1. Study Area
2.2. Data Acquisition
2.2.1. UAV-LiDAR Data
2.2.2. Backpack-LiDAR Data
2.2.3. Field Inventory Data
2.3. LiDAR Data Pre-Processing
2.4. UAV-LiDAR and Backpack-LiDAR Matching
2.5. Forest Parameter Extraction and Accuracy Verification
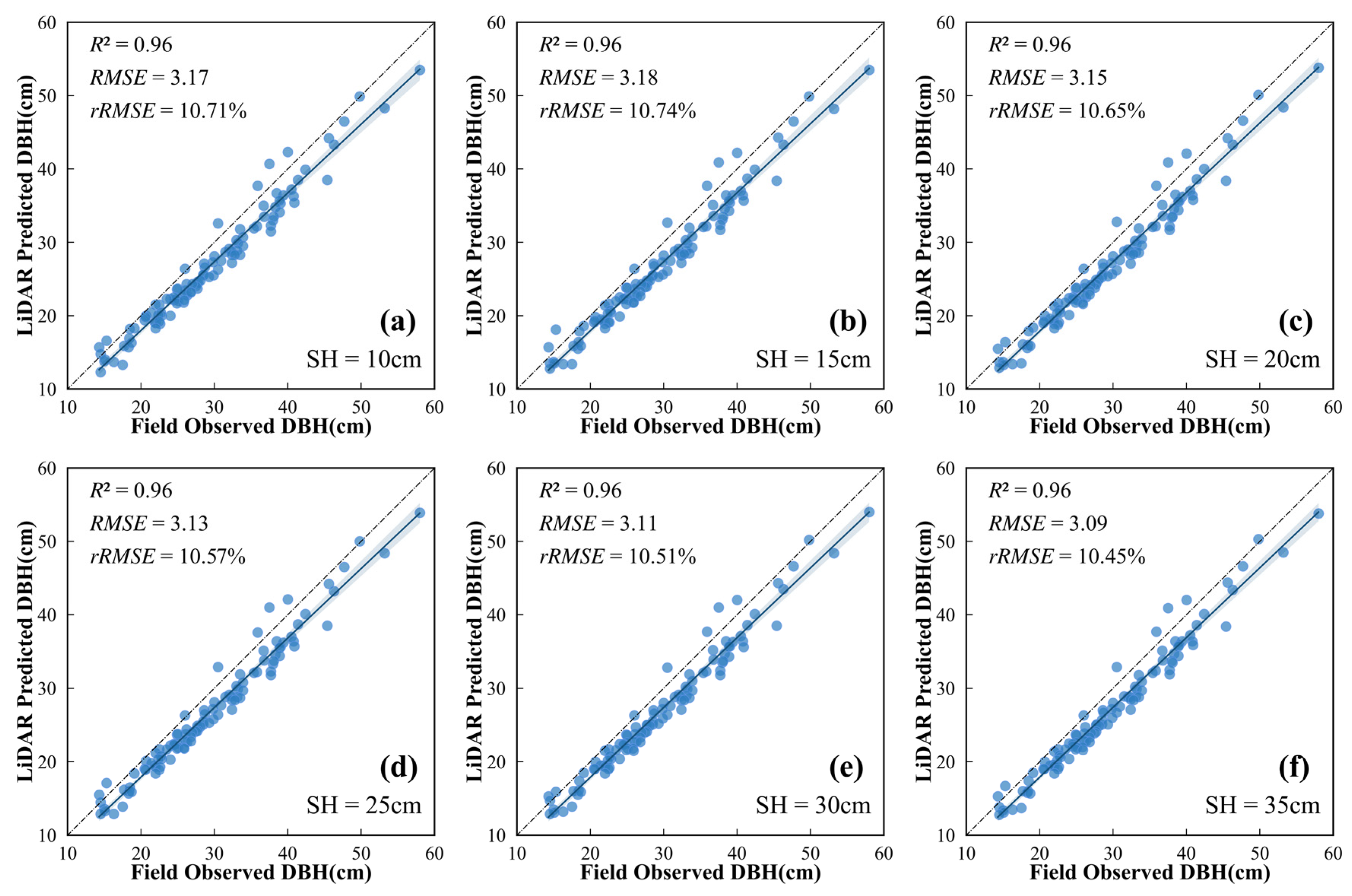
2.5.1. The Diameter at Breast Height Extraction
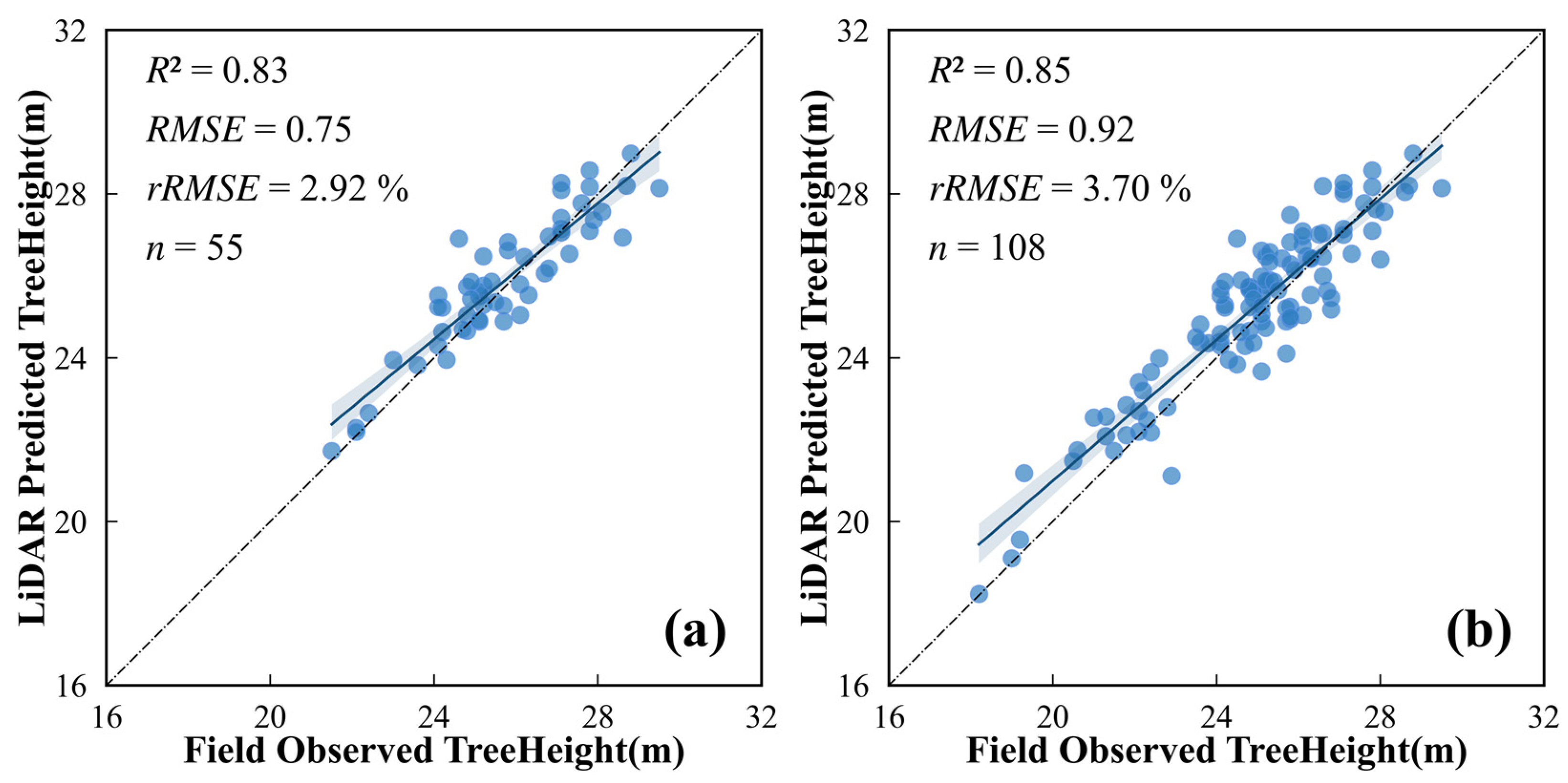
2.5.2. Tree Height Extraction
2.5.3. Accuracy Verification
2.6. Spatial Structure Indicators and Optimization Model Construction Techniques
2.6.1. Spatial Structural Unit of Forest Stands
2.6.2. Indicators for Evaluating the Spatial Structure of Forest Stands
- (1)
- Aggregation index (R)where is the distance from the ith individual tree to its nearest neighbor (m), is the sample plot area (m2), and is the number of plants in the sample plot. The aggregation index is divided into three intervals [0, 1); (1, 2.1491); and 1, representing the aggregated distributions, uniform distributions, and random distributions, respectively;
- (2)
- The diameter to breast height size ratio (U)where is the number of adjacent tree plants of the target tree , if the diameter at breast height of adjacent tree is larger than the diameter at breast height of reference tree , , otherwise . The diameter at breast height size ratio U was judged on five levels: [0, 0.25); [0.25, 0.5); [0.5, 0.75); [0.75, 1); and 1, representing the dominance, sub-dominance, intermediate, sub-inferiority, and inferiority of the target tree within a spatial structural unit, respectively;
- (3)
- Hegyi Competition Index (CI)where is the distance (m) between object tree and competitor tree , is the diameter at breast height (cm) of object tree , is the diameter at breast height (cm) of competitor tree , and is the number of competing trees of object tree . A higher competition index CI means more intense competition between stands, which is detrimental to the overall growth of the stand;
- (4)
- Openness (K)where is the horizontal distance (m) between object tree and nearest tree , is the tree height (m) of nearest tree from , and is the number of competing trees in object tree . The openness K is within five intervals of (0, 0.2]; (0.2, 0.3]; (0.3, 0.4]; (0.4, 0.5]; and (0.5, ∞], indicating severely inadequate, inadequate, relatively adequate, largely adequate, and very adequate internal growth space in the stand, respectively.
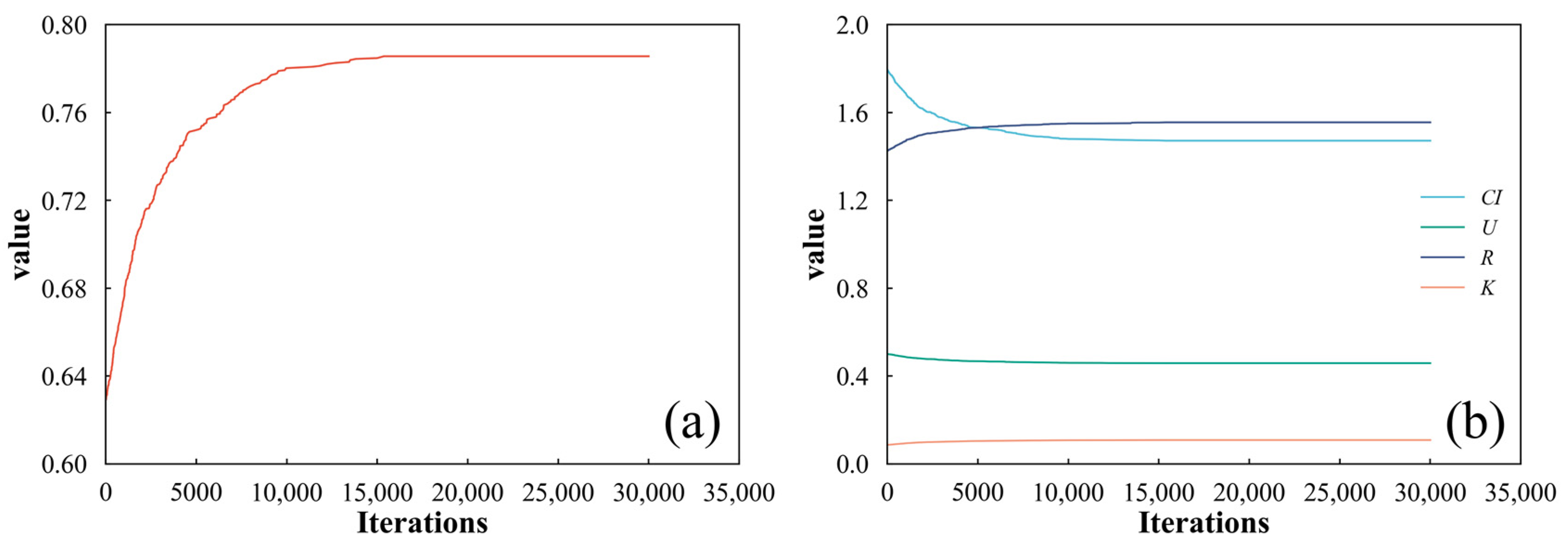
2.6.3. Spatial Structure Dynamic Multi-Objective Optimization Model Construction
2.6.4. Monte Carlo Algorithm Solving
3. Results
3.1. Diameter at Breast Height Extraction Based on Backpack-LiDAR
3.2. Tree Height Extraction Based on UAV-LiDAR
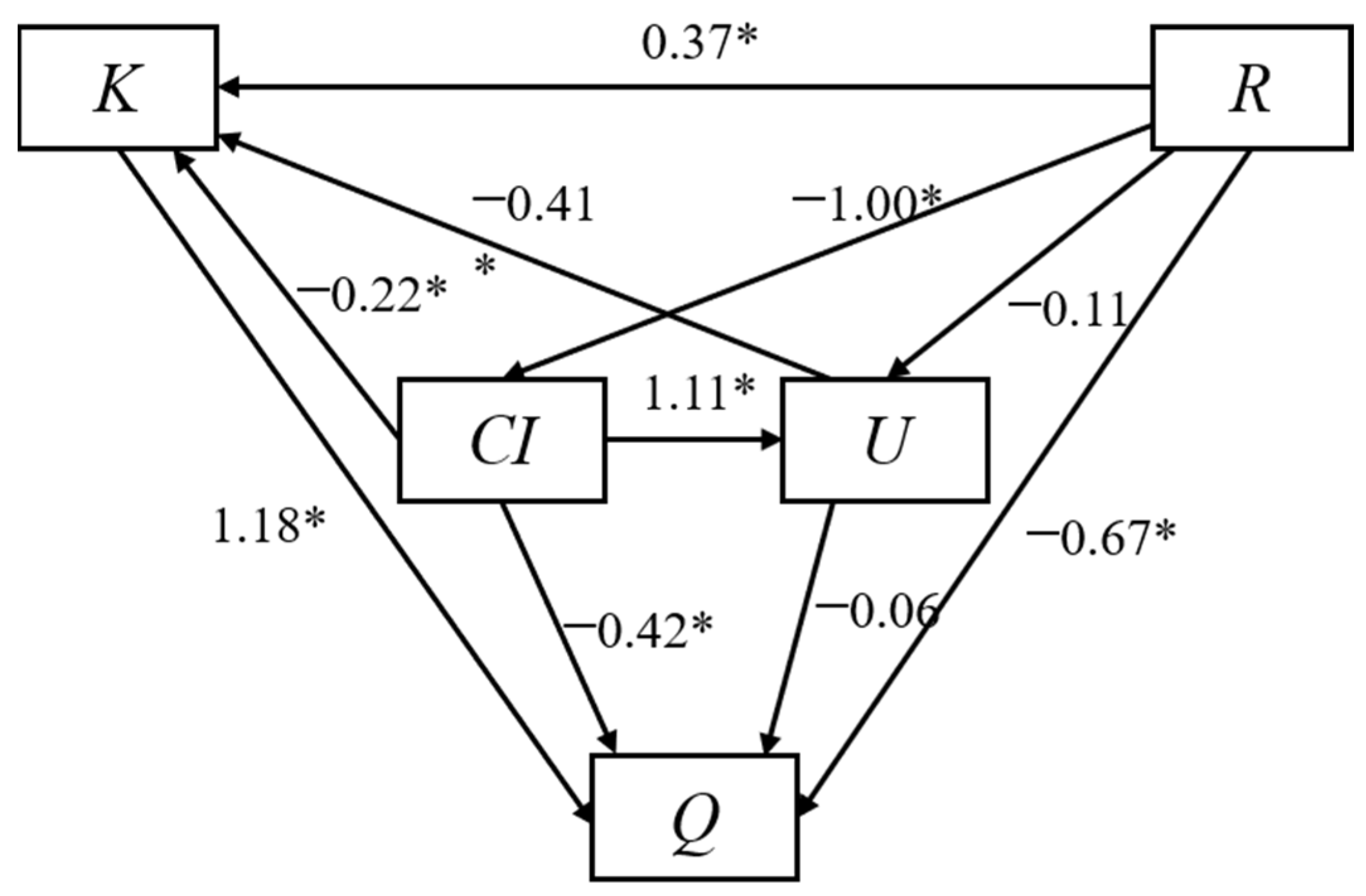
3.3. Results of Stand Structure Optimization
4. Discussion
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Dong, L.; Wei, H.; Liu, Z. Optimizing Forest Spatial Structure with Neighborhood-Based Indices: Four Case Studies from Northeast China. Forests 2020, 11, 413. [Google Scholar] [CrossRef]
- Tang, M. Advances in Study of Forest Spatial Structure. Sci. Silvae Sin. 2010, 46, 117–122. (In Chinese) [Google Scholar]
- Chen, Y.; Yang, H.; Ma, S.; Ren, M. Spatial structure diversity of semi-natural and plantation stands of larix gmelini in Changbai Mountains. J. Beijing For. Univ. 2015, 37, 48–58. (In Chinese) [Google Scholar] [CrossRef]
- Clark, P.J.; Evans, F.C. Distance to Nearest Neighbor as a Measure of Spatial Relationships in Populations. Ecology 1954, 35, 445–453. [Google Scholar] [CrossRef]
- Li, Y.; Hui, G.; Wang, H.; Zhang, G.; Ye, S. Selection priority for harvested trees according to stand structural indices. Iforest Biogeosciences For. 2017, 10, 561–566. [Google Scholar] [CrossRef]
- Hegyi, F. A simulation model for managing jack-pine stands. In Growth Models for Tree and Stand Simulation; Fries, J., Ed.; Royal College of Forestry: Stockholm, Sweden, 1974; pp. 74–90. [Google Scholar]
- Luo, Y.; Chen, Q.; Zhang, P. Spatial Patterns of Shaded Coniferous Forests in the Xinglong Mountains and Their Responses to the Use of Light Energy. Acta Ecol. Sin. 1984, 4, 10–20. (In Chinese) [Google Scholar]
- Gao, W.-Q.; Lei, X.-D.; Liang, M.-W.; Larjavaara, M.; Li, Y.-T.; Gao, D.-L.; Zhang, H.-R. Biodiversity increased both productivity and its spatial stability in temperate forests in northeastern China. Sci. Total Environ. 2021, 780, 146674. [Google Scholar] [CrossRef]
- Li, Y.; Hui, G.; Zhao, Z.; Hu, Y. The bivariate distribution characteristics of spatial structure in natural Korean pine broad-leaved forest. J. Veg. Sci. 2012, 23, 1180–1190. [Google Scholar] [CrossRef]
- Ahmad, B.; Wang, Y.; Hao, J.; Liu, Y.; Bohnett, E.; Zhang, K. Variation of carbon density components with overstory structure of larch plantations in northwest China and its implication for optimal forest management. For. Ecol. Manag. 2021, 496, 119399. [Google Scholar] [CrossRef]
- Cabon, A.; Mouillot, F.; Lempereur, M.; Ourcival, J.-M.; Simioni, G.; Limousin, J.-M. Thinning increases tree growth by delaying drought-induced growth cessation in a Mediterranean evergreen oak coppice. For. Ecol. Manag. 2018, 409, 333–342. [Google Scholar] [CrossRef]
- Zhang, H.; Ying, B.; Hu, Y.; Wang, Y.; Yu, X.; Tang, C. Response of soil respiration to thinning is altered by thinning residue treatment in Cunninghamia lanceolata plantations. Agric. For. Meteorol. 2022, 324, 109089. [Google Scholar] [CrossRef]
- Deng, W.; Xiang, W.; Ouyang, S.; Hu, Y.; Chen, L.; Zeng, Y.; Deng, X.; Zhao, Z.; Forrester, D.I. Spatially explicit optimization of the forest management tradeoff between timber production and carbon sequestration. Ecol. Indic. 2022, 142, 109193. [Google Scholar] [CrossRef]
- Li, Y.; Ye, S.; Hui, G.; Hu, Y.; Zhao, Z. Spatial structure of timber harvested according to structure-based forest management. For. Ecol. Manag. 2014, 322, 106–116. [Google Scholar] [CrossRef]
- Ye, S.; Zheng, Z.; Diao, Z.; Ding, G.; Bao, Y.; Liu, Y.; Gao, G. Effects of Thinning on the Spatial Structure of Larix principis-rupprechtii Plantation. Sustainability 2018, 10, 1250. [Google Scholar] [CrossRef]
- Zhao, W.; Cao, X.; Xie, Z.; Pang, Y.; Sun, Y.; Li, J.; Mo, Y.; Yuan, D. Evaluation of Stand Spatial Structure of Cunninghamia lanceolata Public Welfare Forest by Using Structural Equation Model. Sci. Silvae Sin. 2022, 58, 76–88. (In Chinese) [Google Scholar]
- Dong, L.; Bettinger, P.; Liu, Z. Optimizing neighborhood-based stand spatial structure: Four cases of boreal forests. For. Ecol. Manag. 2022, 506, 119965. [Google Scholar] [CrossRef]
- Qiu, H.; Zhang, H.; Lei, K.; Hu, X.; Yang, T.; Jiang, X. A New Tree-Level Multi-Objective Forest Harvest Model (MO-PSO): Integrating Neighborhood Indices and PSO Algorithm to Improve the Optimization Effect of Spatial Structure. Forests 2023, 14, 441. [Google Scholar] [CrossRef]
- Sun, Y.; Jin, X.; Pukkala, T.; Li, F. Two-level optimization approach to tree-level forest planning. For. Ecosyst. 2022, 9, 100001. [Google Scholar] [CrossRef]
- Bettinger, P.; Tang, M. Tree-Level Harvest Optimization for Structure-Based Forest Management Based on the Species Mingling Index. Forests 2015, 6, 1121–1144. [Google Scholar] [CrossRef]
- Li, C.; Li, Z. Generalizing Predictive Models of Sub-Tropical Forest Inventory Attributes Using anArea-Based Approach with Airborne LiDAR Data. Sci. Silvae Sin. 2021, 57, 23–35. (In Chinese) [Google Scholar]
- Zhang, B.; Li, X.; Du, H.; Zhou, G.; Mao, F.; Huang, Z.; Zhou, L.; Xuan, J.; Gong, Y.; Chen, C. Estimation of Urban Forest Characteristic Parameters Using UAV-Lidar Coupled with Canopy Volume. Remote Sens. 2022, 14, 6375. [Google Scholar] [CrossRef]
- Carrer, M.; Castagneri, D.; Popa, I.; Pividori, M.; Lingua, E. Tree spatial patterns and stand attributes in temperate forests: The importance of plot size, sampling design, and null model. For. Ecol. Manag. 2018, 407, 125–134. [Google Scholar] [CrossRef]
- Jiang, X.; Li, G.; Lu, D.; Chen, E.; Wei, X. Stratification-Based Forest Aboveground Biomass Estimation in a Subtropical Region Using Airborne Lidar Data. Remote Sens. 2020, 12, 1101. [Google Scholar] [CrossRef]
- Yin, T.; Cook, B.D.; Morton, D.C. Three-dimensional estimation of deciduous forest canopy structure and leaf area using multi-directional, leaf-on and leaf-off airborne lidar data. Agric. For. Meteorol. 2022, 314, 108781. [Google Scholar] [CrossRef]
- Almeida, D.R.A.; Stark, S.C.; Chazdon, R.; Nelson, B.W.; Cesar, R.G.; Meli, P.; Gorgens, E.B.; Duarte, M.M.; Valbuena, R.; Moreno, V.S.; et al. The effectiveness of lidar remote sensing for monitoring forest cover attributes and landscape restoration. For. Ecol. Manag. 2019, 438, 34–43. [Google Scholar] [CrossRef]
- Cao, L.; Coops, N.C.; Sun, Y.; Ruan, H.; Wang, G.; Dai, J.; She, G. Estimating canopy structure and biomass in bamboo forests using airborne LiDAR data. ISPRS J. Photogramm. Remote Sens. 2019, 148, 114–129. [Google Scholar] [CrossRef]
- Shao, J.; Yao, W.; Wan, P.; Luo, L.; Wang, P.; Yang, L.; Lyu, J.; Zhang, W. Efficient co-registration of UAV and ground LiDAR forest point clouds based on canopy shapes. Int. J. Appl. Earth Obs. Geoinf. 2022, 114, 103067. [Google Scholar] [CrossRef]
- Fekry, R.; Yao, W.; Cao, L.; Shen, X. Ground-based/UAV-LiDAR data fusion for quantitative structure modeling and tree parameter retrieval in subtropical planted forest. For. Ecosyst. 2022, 9, 674–691. [Google Scholar] [CrossRef]
- Liang, X.; Hyyppa, J.; Kaartinen, H.; Lehtomaki, M.; Pyorala, J.; Pfeifer, N.; Holopainen, M.; Brolly, G.; Francesco, P.; Hackenberg, J.; et al. International benchmarking of terrestrial laser scanning approaches for forest inventories. ISPRS J. Photogramm. Remote Sens. 2018, 144, 137–179. [Google Scholar] [CrossRef]
- Shimizu, K.; Nishizono, T.; Kitahara, F.; Fukumoto, K.; Saito, H. Integrating terrestrial laser scanning and unmanned aerial vehicle photogrammetry to estimate individual tree attributes in managed coniferous forests in Japan. Int. J. Appl. Earth Obs. Geoinf. 2022, 106, 102658. [Google Scholar] [CrossRef]
- Lu, J.; Wang, H.; Qin, S.; Cao, L.; Pu, R.; Li, G.; Sun, J. Estimation of aboveground biomass of Robinia pseudoacacia forest in the Yellow River Delta based on UAV and Backpack LiDAR point clouds. Int. J. Appl. Earth Obs. Geoinf. 2020, 86, 102014. [Google Scholar] [CrossRef]
- Bazezew, M.N.; Hussin, Y.A.; Kloosterman, E.H. Integrating Airborne LiDAR and Terrestrial Laser Scanner forest parameters for accurate above-ground biomass/carbon estimation in Ayer Hitam tropical forest, Malaysia. Int. J. Appl. Earth Obs. Geoinf. 2018, 73, 638–652. [Google Scholar] [CrossRef]
- Giannetti, F.; Puletti, N.; Quatrini, V.; Travaglini, D.; Bottalico, F.; Corona, P.; Chirici, G. Integrating terrestrial and airborne laser scanning for the assessment of single-tree attributes in Mediterranean forest stands. Eur. J. Remote Sens. 2018, 51, 795–807. [Google Scholar] [CrossRef]
- Xuan, J.; Li, X.; Du, H.; Zhou, G.; Mao, F.; Wang, J.; Zhang, B.; Gong, Y.; Zhu, D.e.; Zhou, L.; et al. Intelligent Estimating the Tree Height in Urban Forests Based on Deep Learning Combined with a Smartphone and a Comparison with UAV-LiDAR. Remote Sens. 2023, 15, 97. [Google Scholar] [CrossRef]
- Qin, H.; Zhou, W.; Yao, Y.; Wang, W. Individual tree segmentation and tree species classification in subtropical broadleaf forests using UAV-based LiDAR, hyperspectral, and ultrahigh-resolution RGB data. Remote Sens. Environ. 2022, 280, 113143. [Google Scholar] [CrossRef]
- Zhao, X.; Guo, Q.; Su, Y.; Xue, B. Improved progressive TIN densification filtering algorithm for airborne LiDAR data in forested areas. ISPRS J. Photogramm. Remote Sens. 2016, 117, 79–91. [Google Scholar] [CrossRef]
- Lee, H.; Slatton, K.C.; Roth, B.E.; Cropper, W.P. Adaptive clustering of airborne LiDAR data to segment individual tree crowns in managed pine forests. Int. J. Remote Sens. 2010, 31, 117–139. [Google Scholar] [CrossRef]
- Su, Y.; Guo, Q.; Jin, S.; Guan, H.; Sun, X.; Ma, Q.; Hu, T.; Wang, R.; Li, Y. The Development and Evaluation of a Backpack LiDAR System for Accurate and Efficient Forest Inventory. IEEE Geosci. Remote Sens. Lett. 2021, 18, 1660–1664. [Google Scholar] [CrossRef]
- Theiler, P.W.; Wegner, J.D.; Schindler, K. Keypoint-based 4-Points Congruent Sets—Automated marker-less registration of laser scans. ISPRS J. Photogramm. Remote Sens. 2014, 96, 149–163. [Google Scholar] [CrossRef]
- Weinmann, M.; Jutzi, B. Geometric point quality assessment for the automated, markerless and robust registration of unordered TLS point clouds. ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2015, 89–96. [Google Scholar] [CrossRef]
- Xu, Z.; Shen, X.; Cao, L. Extraction of Forest Structural Parameters by the Comparison of Structure from Motion (SfM) and Backpack Laser Scanning (BLS) Point Clouds. Remote Sens. 2023, 15, 2144. [Google Scholar] [CrossRef]
- Tao, S.; Wu, F.; Guo, Q.; Wang, Y.; Li, W.; Xue, B.; Hu, X.; Li, P.; Tian, D.; Li, C.; et al. Segmenting tree crowns from terrestrial and mobile LiDAR data by exploring ecological theories. ISPRS J. Photogramm. Remote Sens. 2015, 110, 66–76. [Google Scholar] [CrossRef]
- Li, W.; Guo, Q.; Jakubowski, M.; Kelly, M. A New Method for Segmenting Individual Trees from the Lidar Point Cloud. Photogramm. Eng. Remote Sens. 2012, 78, 75–84. [Google Scholar] [CrossRef]
- Zhu, J.; Liu, Q.; Cui, X.; Zhang, W. Extraction of individual tree parameters by combining terrestrial and UAV LiDAR. Trans. Chin. Soc. Agric. Eng. 2022, 38, 51–58. (In Chinese) [Google Scholar]
- Wang, H.; Zhang, G.; Hui, G.; Li, Y.; Hu, Y.; Zhao, Z. The influence of sampling unit size and spatial arrangement patterns on neighborhood-based spatial structure analyses of forest stands. For. Syst. 2016, 25, 56. [Google Scholar] [CrossRef]
- Cui, R.; Qi, S.; Wu, B.; Zhang, D.; Zhang, L.; Zhou, P.; Ma, N.; Huang, X. The Influence of Stand Structure on Understory Herbaceous Plants Species Diversity of Platycladus orientalis Plantations in Beijing, China. Forests 2022, 13, 1921. [Google Scholar] [CrossRef]
- Liu, S.; Zhang, J.; Li, J.; Zhou, G.; Wu, S. Edge Correction of Voronoi Diagram in Forest Spatial Structure Analysis. Sci. Silvae Sin. 2017, 53, 28–37. (In Chinese) [Google Scholar]
- Wang, Z.; Li, Y.; Meng, Y.; Li, C.; Zhang, Z. Thinning Effects on Stand Structure and Carbon Content of Secondary Forests. Forests 2022, 13, 512. [Google Scholar] [CrossRef]
- Põldveer, E.; Korjus, H.; Kiviste, A.; Kangur, A.; Paluots, T.; Laarmann, D. Assessment of spatial stand structure of hemiboreal conifer dominated forests according to different levels of naturalness. Ecol. Indic. 2020, 110, 105944. [Google Scholar] [CrossRef]
- Tang, M.; Tang, S.; Lei, X.; Li, X. Study on Spatial Structure Optimizing Model of Stand Selection Cutting. Sci. Silvae Sin. 2004, 40, 25–31. (In Chinese) [Google Scholar]
- Fan, Y.; Chen, J.; Shirkey, G.; John, R.; Wu, R.; Park, H.; Shao, C. Applications of structural equation modeling (SEM) in ecological research: An updated review. Ecol. Process. 2016, 5, 19. [Google Scholar] [CrossRef]
- Dong, L.; Bettinger, P.; Liu, Z.; Qin, H. A comparison of a neighborhood search technique for forest spatial harvest scheduling problems: A case study of the simulated annealing algorithm. For. Ecol. Manag. 2015, 356, 124–135. [Google Scholar] [CrossRef]
- Bettinger, P.; Graetz, D.; Boston, K.; Sessions, J.; Chung, W. Eight heuristic planning techniques applied to three increasingly difficult wildlife planning problems. Silva Fenn. 2002, 36, 561–584. [Google Scholar] [CrossRef]
- Næsset, E. Estimating timber volume of forest stands using airborne laser scanner data. Remote Sens. Environ. Interdiscip. J. 1997, 61, 246–253. [Google Scholar] [CrossRef]
- Chen, B.; Li, Z.; Pang, Y.; Liu, Q.; Gao, X.; Gao, J.; Fu, A. Forest height estimation based on uav lidar simulated waveform. In Proceedings of the 2017 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Fort Worth, TX, USA, 23–28 July 2017; pp. 2859–2862. [Google Scholar]
- Xie, Y.; Yang, T.; Wang, X.; Chen, X.; Pang, S.; Hu, J.; Wang, A.; Chen, L.; Shen, Z. Applying a Portable Backpack Lidar to Measure and Locate Trees in a Nature Forest Plot: Accuracy and Error Analyses. Remote Sens. 2022, 14, 1806. [Google Scholar] [CrossRef]
- Xie, Y.; Zhang, J.; Chen, X.; Pang, S.; Zeng, H.; Shen, Z. Accuracy assessment and error analysis for diameter at breast height measurement of trees obtained using a novel backpack LiDAR system. For. Ecosyst. 2020, 7, 421–431. [Google Scholar] [CrossRef]
- Su, Y.; Guan, H.; Hu, T.; Guo, Q. The Integration of Uavand Backpack Lidar Systems for Forest Inventory. In Proceedings of the IGARSS 2018–2018 IEEE International Geoscience and Remote Sensing Symposium, Valencia, Spain, 22–27 July 2018; pp. 8757–8760. [Google Scholar]
- Liu, G.; Wang, J.; Dong, P.; Chen, Y.; Liu, Z. Estimating Individual Tree Height and Diameter at Breast Height (DBH) from Terrestrial Laser Scanning (TLS) Data at Plot Level. Forests 2018, 9, 398. [Google Scholar] [CrossRef]
- Heo, H.K.; Lee, D.K.; Park, J.H.; Thorne, J. Estimating the heights and diameters at breast height of trees in an urban park and along a street using mobile LiDAR. Landsc. Ecol. Eng. 2019, 15, 253–263. [Google Scholar] [CrossRef]
- Olofsson, K.; Holmgren, J.; Olsson, H. Tree Stem and Height Measurements using Terrestrial Laser Scanning and the RANSAC Algorithm. Remote Sens. 2014, 6, 4323–4344. [Google Scholar] [CrossRef]
- Dong, L.; Liu, Z. Visual Management Simulation for Pinus sylvestris var.mongolica Plantation Based on Optimized Spatial Structure. Sci. Silvae Sin. 2012, 48, 77–85. (In Chinese) [Google Scholar]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | UAV-LiDAR | Backpack-LiDAR |
|---|---|---|
| Sensors | Velodyne Puck LITE×1 | Velodyne Puck VLP-16×2 |
| Max. range | 100 m | 100 m |
| Ranging accuracy | ±3 cm | ±3 cm |
| Wavelength | 903 nm | 903 nm |
| Vertical FOV | ± 15° | ± 15° |
| Horizontal FOV | 360° | 360° |
| Scanning speed | 300,000 pts/s | 600,000 pts/s |
| Attributes | Maximum | Minimum | Range | Average | Standard Deviation |
|---|---|---|---|---|---|
| DBH/cm | 58 | 14.3 | 43.7 | 29.2 | 8.9 |
| H/m | 29.5 | 18.2 | 11.3 | 24.9 | 2.2 |
| Parameters | Before Thinning | After Thinning | Change Tendency | Magnitude of Change/% |
|---|---|---|---|---|
| R | 1.43 | 1.55 | Increased | +8.40 |
| U | 0.50 | 0.46 | Decreased | −8.00 |
| CI | 1.77 | 1.47 | Decreased | −17.65 |
| K | 0.09 | 0.11 | Increased | +22.22 |
| Q | 0.63 | 0.79 | Increased | +25.40 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, C.; Zhou, L.; Li, X.; Zhao, Y.; Yu, J.; Lv, L.; Du, H. Optimizing the Spatial Structure of Metasequoia Plantation Forest Based on UAV-LiDAR and Backpack-LiDAR. Remote Sens. 2023, 15, 4090. https://doi.org/10.3390/rs15164090
Chen C, Zhou L, Li X, Zhao Y, Yu J, Lv L, Du H. Optimizing the Spatial Structure of Metasequoia Plantation Forest Based on UAV-LiDAR and Backpack-LiDAR. Remote Sensing. 2023; 15(16):4090. https://doi.org/10.3390/rs15164090
Chicago/Turabian StyleChen, Chao, Lv Zhou, Xuejian Li, Yinyin Zhao, Jiacong Yu, Lujin Lv, and Huaqiang Du. 2023. "Optimizing the Spatial Structure of Metasequoia Plantation Forest Based on UAV-LiDAR and Backpack-LiDAR" Remote Sensing 15, no. 16: 4090. https://doi.org/10.3390/rs15164090
APA StyleChen, C., Zhou, L., Li, X., Zhao, Y., Yu, J., Lv, L., & Du, H. (2023). Optimizing the Spatial Structure of Metasequoia Plantation Forest Based on UAV-LiDAR and Backpack-LiDAR. Remote Sensing, 15(16), 4090. https://doi.org/10.3390/rs15164090