3.1. Data Description and Experimental Strategy
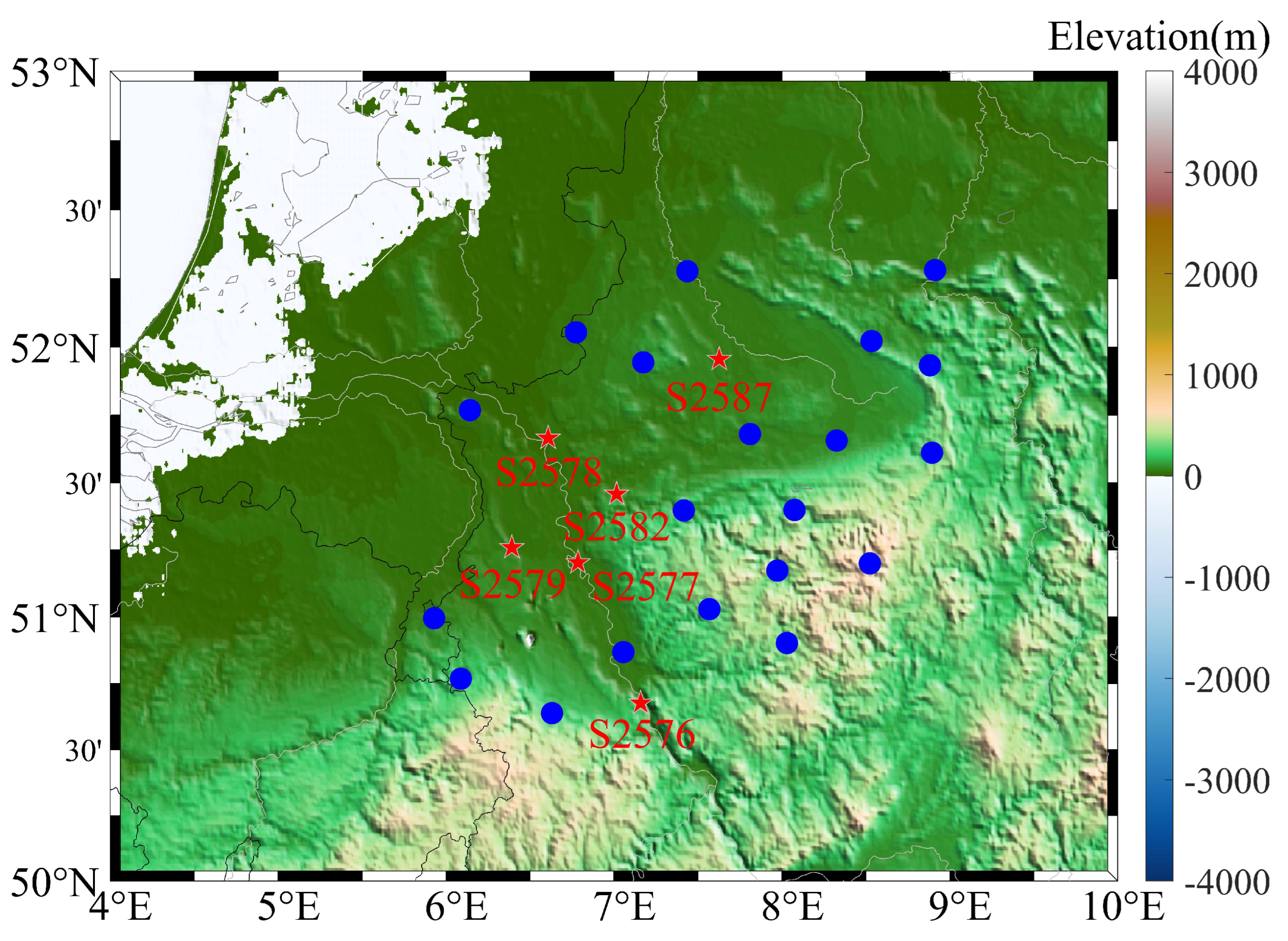
We selected 23 multi-GNSS stations from the satellite positioning service of the German satellite positioning service (SAPOS), as shown in
Figure 1. The GPS, Galileo, and BDS observations with a 15 s sampling rate from DOY 237 to DOY 267 in 2021 were used in this study
https://www.opengeodata.nrw.de/ (accessed on 1 January 2023). Precise clock and orbit products were provided by the German Research Centre for Geosciences (GFZ). BDS geostationary orbit (GEO) satellites were excluded, as they have inadequate orbital and clock accuracies [
36]. The typical ambiguity resolution method proposed by Ge et al. [
37] was used for PPP-AR, which estimated the ambiguity as a constant value for each epoch. The study conducted by Lu et al. [
28] indicated that the optimal modeling for GPS was 4–7 days. The BDS and Galileo satellites require a longer ORT, while multipath is subject to the site environment and will reduce the similarity over time. In this study, 5 repeat cycles were used for GPS multipath modeling, and 3 repeat cycles of data were used for BDS and Galileo modeling.
Table 1 shows the details of the data processing and error correction. To ensure accuracy, a quality control procedure was implemented to eliminate any outliers present in the residuals [
22]. The common mode error (CME) was then mitigated using principal component analysis [
38]. Subsequently, the residuals were allocated to a grid based on the azimuth and elevation angles. Finally, a stacking method was employed to calculate multipath correction, as outlined in the MHM model.
The ORT requirement for BDS and Galileo satellites is longer compared to that of GPS. Additionally, the impact of multipath on the similarity of data reduces over time, due to site–specific environmental factors. The GPS multipath modeling utilized a dataset spanning five days, while the BDS and Galileo modeling employed a dataset spanning 30 days. The details of the experimental scheme are provided in
Table 2. We compared the results obtained without multipath correction (Uncor) as a reference with the results obtained after applying multipath correction (Cor).
3.2. Effectiveness of Multipath Mitigation
The root mean square (RMS) reduction value for all observed satellite residuals was calculated, to indicate the effectiveness of the different methods for multipath correction using the following equation:
where
represents the raw pseudorange or carrier-phase residuals, and
N denotes the number of epochs. The residual reduction percentage was calculated as follows:
where
and
denote the RMS of the residuals before and after the multipath correction, respectively. We calculated the multipath corrections from the residuals according to the multipath characteristics, so other unmodeled errors were not corrected, therefore the RMS reduction result could be considered the contribution of multipath correction.
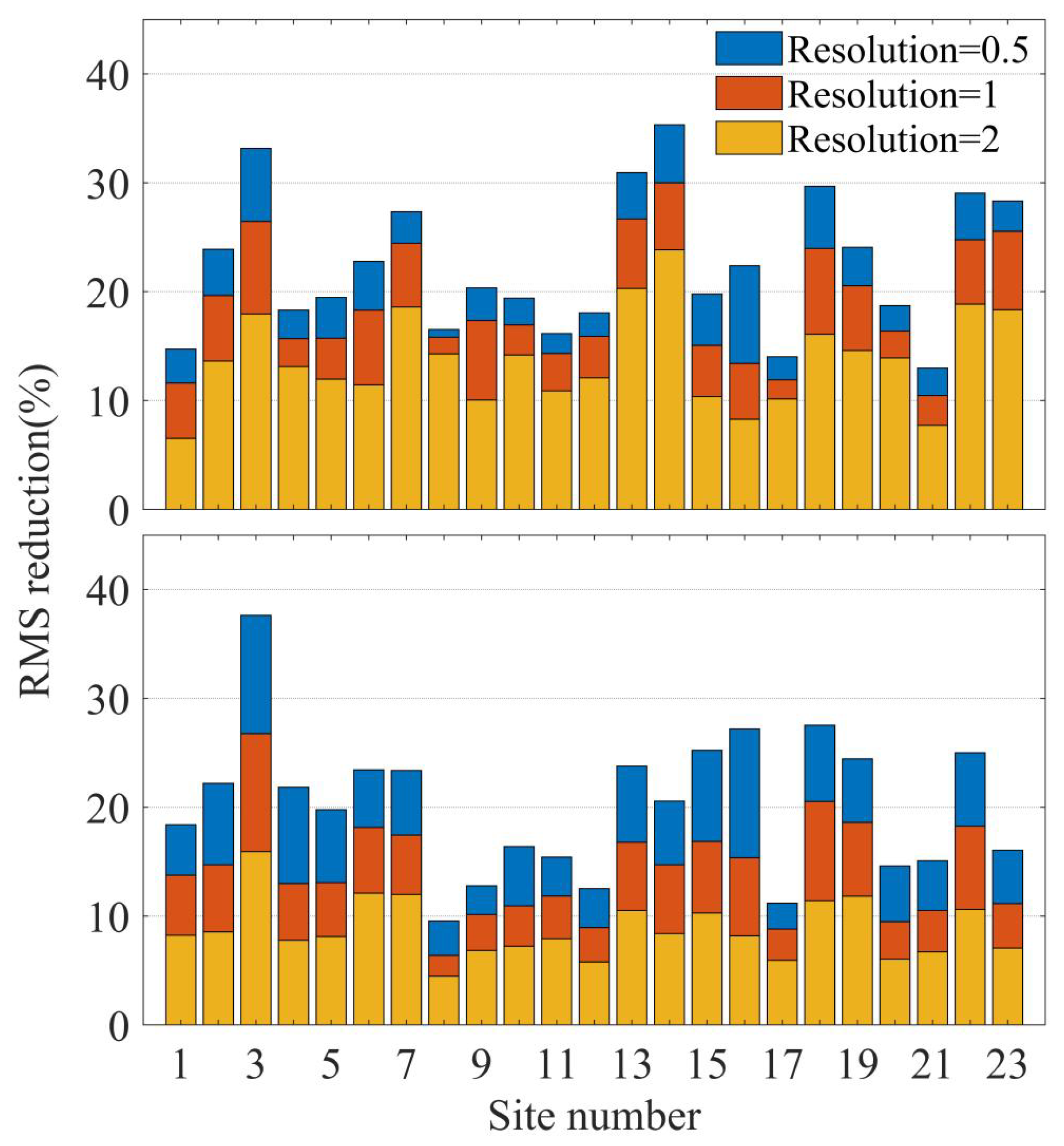
The effectiveness of the different resolution MHM models for GPS PP-AR multipath correction was assessed as shown in
Figure 2. The site number was used to categorize the number of 23 stations, such as station 2576, 2577, and 2578. For an MHM resolution of 0.5/1/2, the average RMS reductions of the carrier-phase residual were 22.4%, 18.7%, and 13.8%, respectively. The pseudorange values were 20.18%, 14.2%, and 8.8%, respectively. Theoretically, as the grid resolution increases, the grid size decreases, and a relatively small grid size reduced the robustness of the MHM model. In our experiments, the performance of the MHM deteriorated with the increase in grid size, and the optimal resolution was 0.5° × 0.5°, which will be addressed in the following discussion.
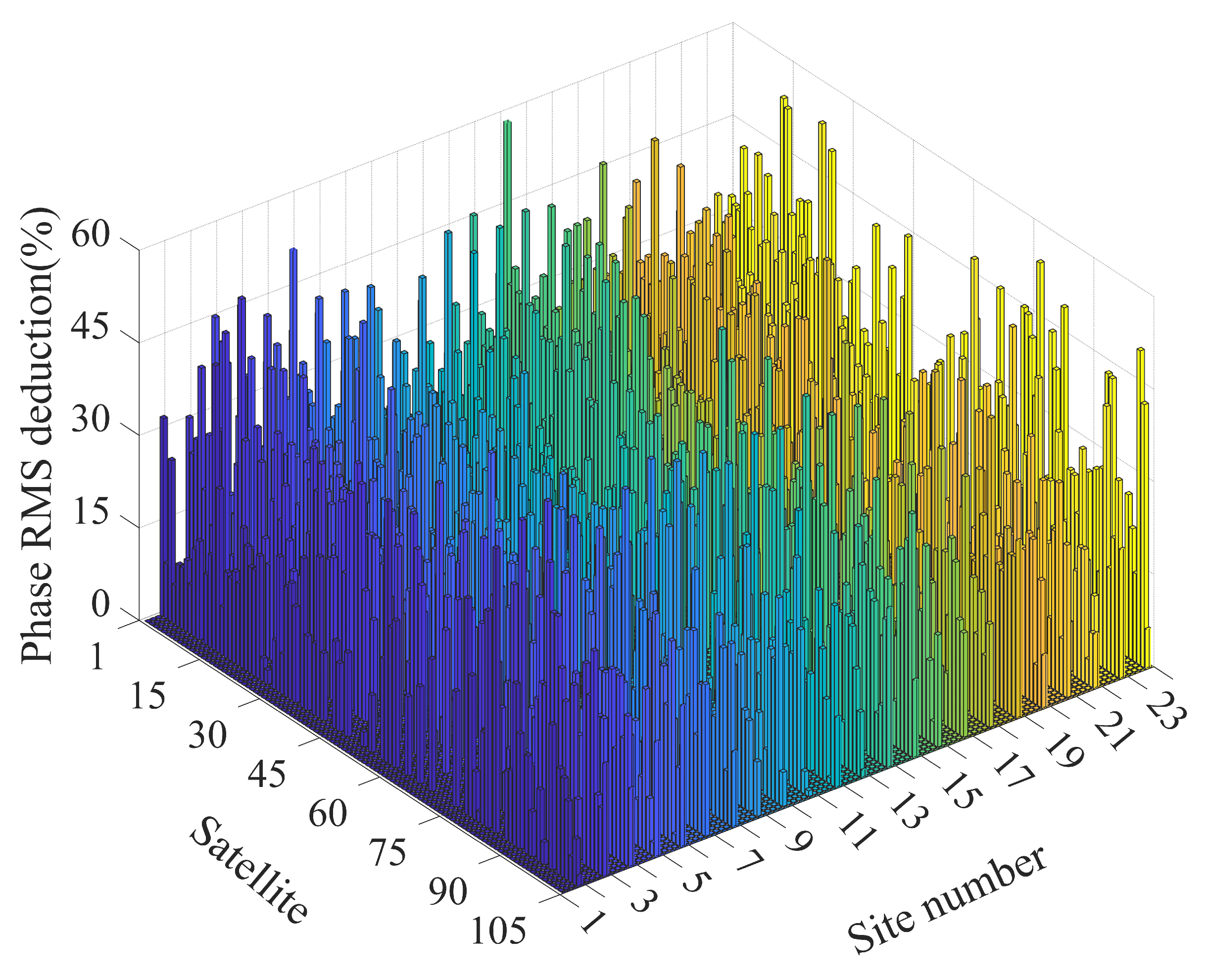
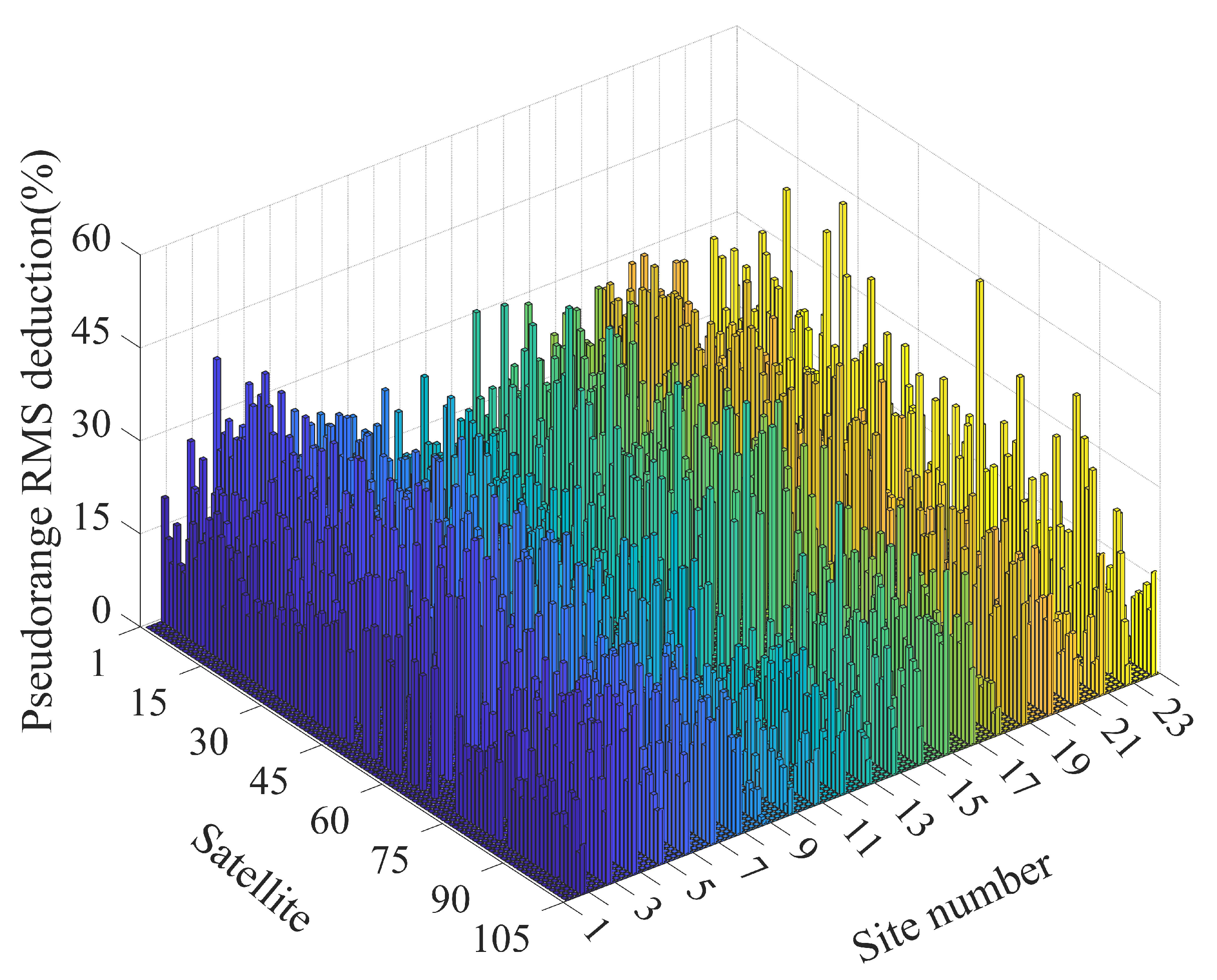
Figure 3 shows the phase RMS reduction after the multipath correction using an MHM
(MHM model with a 0.5° × 0.5° resolution) observable satellite at each station. Among them, 1–32 were GPS, 33–68 were Galileo, and 69–105 were BDS satellites. Compared with
Figure 4, the reduction percentage of pseudorange residual RMS was generally lower than that of the carrier-phase, which was primarily attributed to the large error of pseudorange observation, as well as the presence of numerous gross errors that diminished the correlation between the model and real-time multipath.
Table 3 presents the average percentages of RMS reduction achieved by the MHM
and SF models applied to real-time PPP-AR multipath correction. When calculating the mean percentage reduction in multipath corrected RMS, all satellites at all stations were considered indiscriminately, the average RMS reductions of the carrier-phase and pseudorange residuals of multi-GNSS were 25.5% and 20.1% with MHM
. In comparison, the SF model yielded reductions of 24.4% and 18.3% for carrier-phase and pseudorange residuals, respectively. As summarized in
Table 3, the MHM
and SF models exhibited comparable performance, with MHM
showing a slight superiority over SF. One probable reason for this phenomenon was that SF can introduce additional noise when applied to real-time processing. Furthermore, the effectiveness of multipath corrections for GPS satellites is better than for the Galileo and BDS satellites. The environment around the station experienced relatively less interference in the short term, and the ORT of GPS satellites was shorter than that for Galileo and BDS. Thereby, permitting the GPS satellites to obtain a more pronounced multipath correction model for real-time applications. In addition, the partial residuals of the satellites on modeling days had little similarity, thereby reducing the multipath correction efficiency.
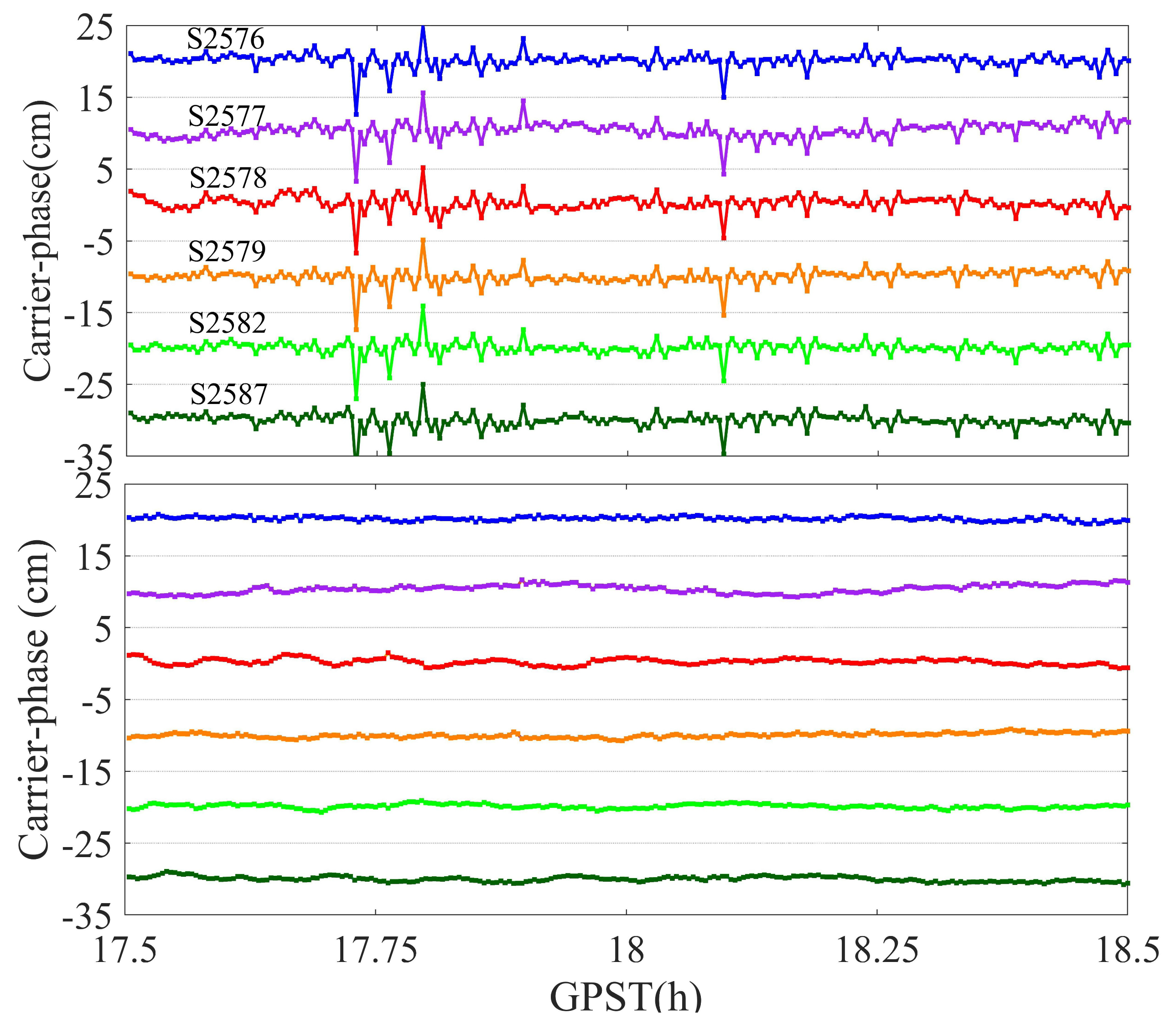
PPP is also vulnerable to other unmodeled errors, such as the CME.
Figure 5 shows the raw carrier-phase residuals of G13 for six stations which are distant from each other (as shown in
Figure 1, red circle). The carrier-phase residuals show similar fluctuations at the six stations, ranging from 17.5 to 18.5 h. Due to the relatively long distances between stations, the presence of fluctuations cannot be solely attributed to the similar environments at each station. Referring to the relevant inferences by Zheng et al. [
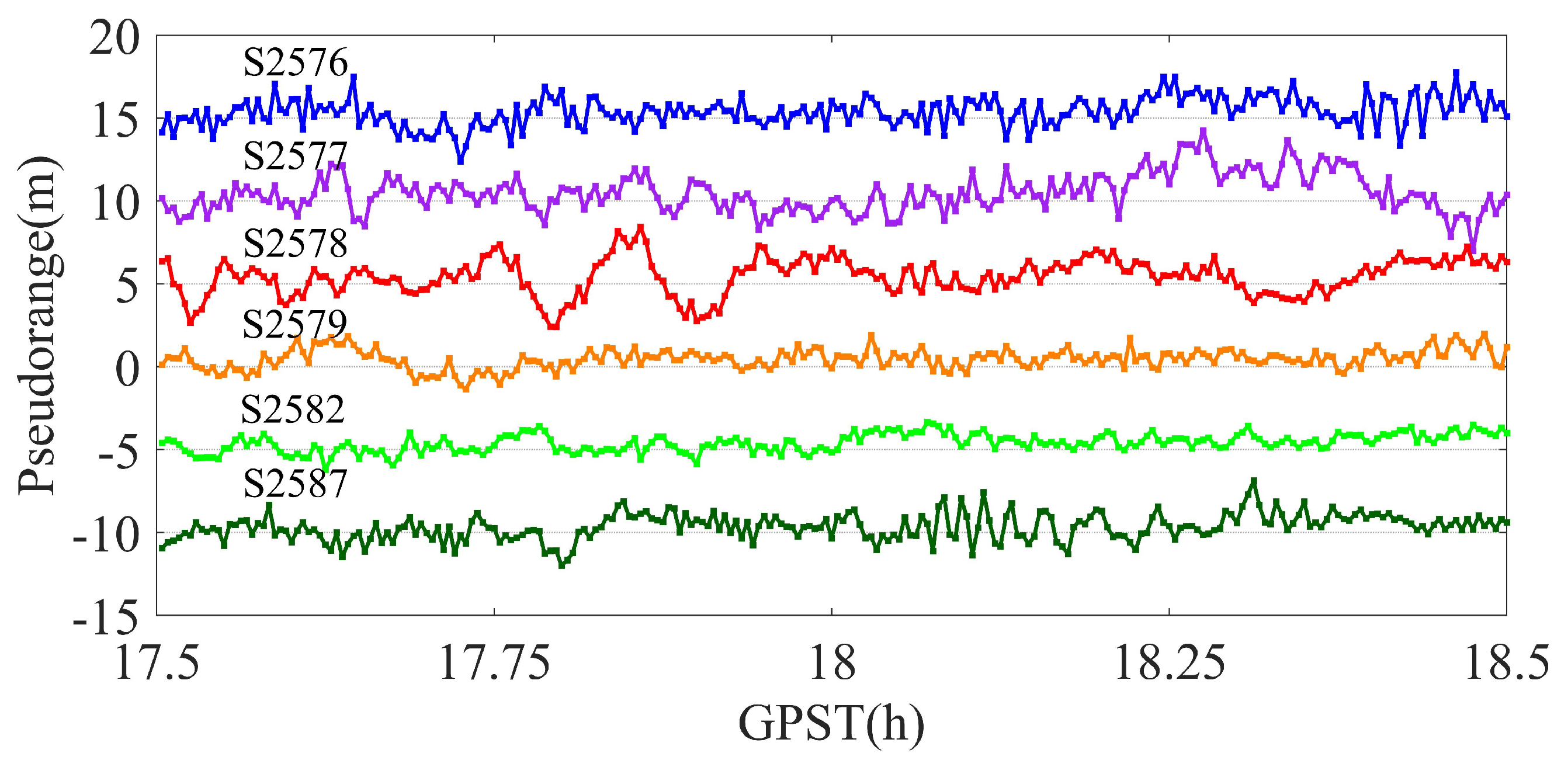
2] in coordinate domains, the CME could have been mainly caused by satellite orbit and clock errors, as well as the components of unmodeled errors, which deteriorated the multipath modeling to some extent. Due to the larger measurement noise, the CME was not evident in the same period in the pseudorange residuals, as shown in
Figure 6.
3.3. Performance of PPP-AR with Multipath Mitigation
The performance of multi-GNSS PPP-AR with multipath correction was evaluated. The time to first fix (TTFF) was used as an indicator of positioning performance, defined as the time required for the first ambiguity to be successfully resolved [
41].
Table 4 presents a comparison of the average TTFF values for different schemes, including MHM
and SF, across 23 stations. The results indicate that, in terms of TTFF improvement, MHM
slightly outperformed SF. Compared with SF, the average MHM
TTFF was decreased by about 0.3 min and 1.1 min for each scheme in the static and kinematic mode, respectively. In the kinematic mode, the TTFF of the GPS-only solution with MHM
was reduced from 55.1 min to 51.2 min compared to the case without multipath correction. The GE solution shortened by 21.5% to 16.9 min, while the GC solution was reduced by 37.5% from 25.3 min to 15.8 min. As expected, the GEC solution achieved the shortest TTFF of approximately 12.2 min. In static mode, after applying MHM
, the GPS-only PPP-AR achieved the first fixed solution within 20 min, and that of the dual system was approximately 12 min. The TTFF of the GEC solution was reduced to approximately 10 min.
The integrated system demonstrated superior positioning performance in comparison to the individual systems, indicating a substantial enhancement in both kinematic and static scenarios. The results substantiate that the addition of additional constellations effectively reduced the time to first fix (TTFF) for PPP-AR. On this basis, incorporating multipath correction further enhanced the TTFF performance of PPP-AR.
In kinematic PPP-AR, the convergence time is defined as the minimum duration required to attain a horizontal accuracy of 10 cm and to sustain it for 10 consecutive epochs. In static PPP-AR, the horizontal accuracy requirement is enhanced to 5 cm and maintained within 5 cm for 10 consecutive epochs. The impact of multipath mitigation on the convergence time in real-time PPP-AR for G/GE/GC/GEC combinations was evaluated, and the statistical results of the averaged convergence time before and after multipath correction are shown in
Table 5.
After employing MHM
for multipath correction in kinematic mode, the average convergence time for the GPS-only results was shortened by 56.4% to 18.2 min and shortened by 38.4% to 11.7 min for GE. It is worth noting that the GC was markedly shortened from 20.7 to 8.6 min, which is a more noticeable improvement compared to the GE solution. In the given scenario, the correction performance of the SF and MHM
was comparable. However, the SF model exhibited slightly better correction results for GPS compared to MHM
. The GEC solution achieved a significant reduction of 60.6% and converged in approximately 7 min in both correction models. In static mode, the GEC solution average convergence time was shortened by 33.6% from 12.5 to 8.3 min with MHM
correction, while the impact of SF was measured as 21.6%. From
Table 5, it can be seen that multipath correction exhibited a clear enhancement in the convergence time of the different satellite combinations. This finding further suggests that, by correcting for multipath errors, rapid centimeter-level positioning is expected, even in scenarios with a suboptimal satellite distribution.
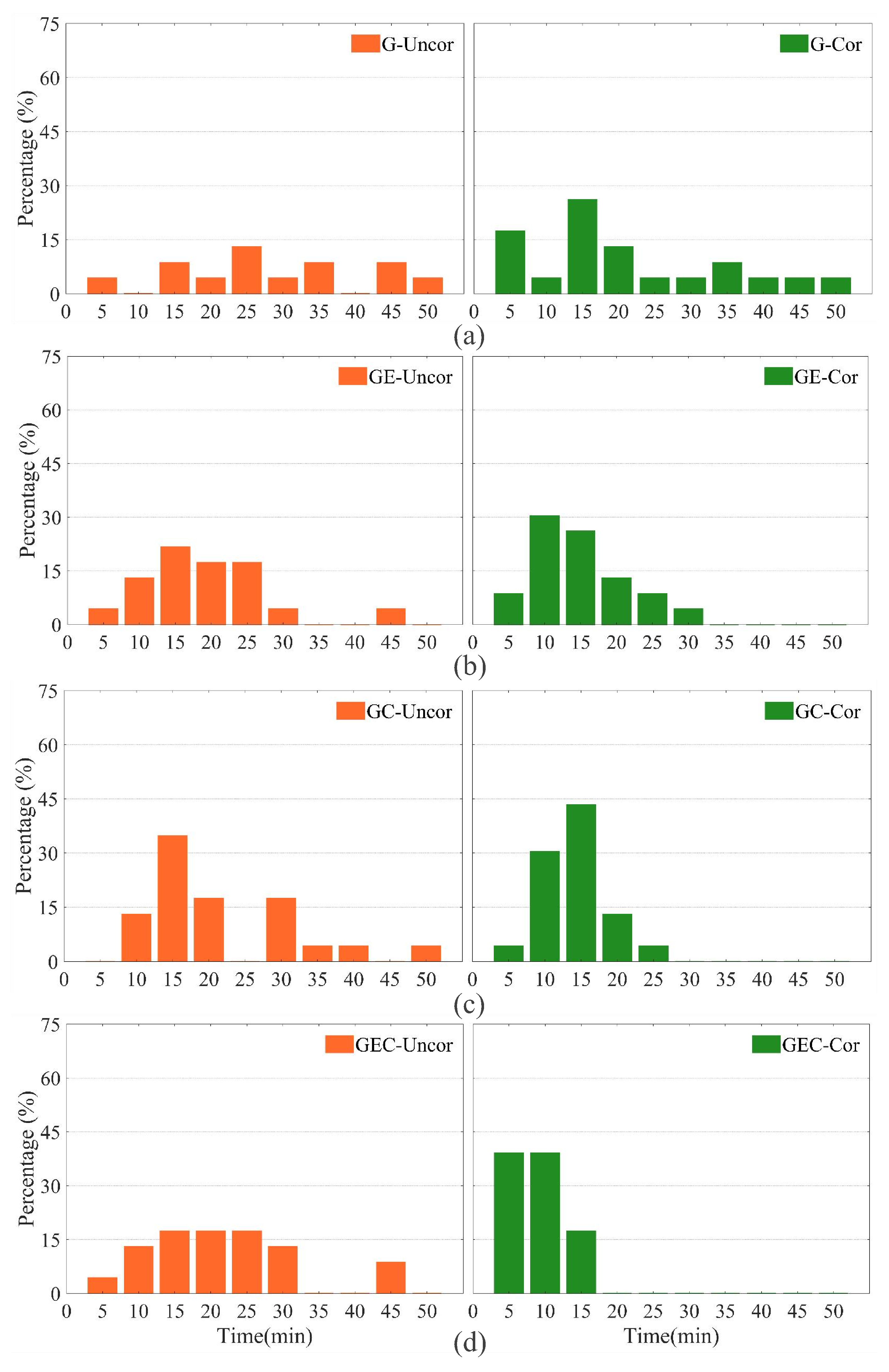
In order to compare and illustrate the convergence time of kinematic PPP-AR before and after multipath correction, we provide the percentage of stations converging within each time period within a 50-minute interval, as shown in
Figure 7. In each subgraph, the orange bar chart represents the original results, while the green bar charts represent the results with multipath correction. In some instances, few observed GPS satellites may have caused the GPS PPP-AR to achieve convergence in more than 40 min [
41]. Before applying multipath correction, the convergence time for most stations in GPS-only PPP-AR ranged from 15 to 45 min, with only 17.4% of stations converging within 20 min. In contrast, the convergence time for the GE solution was mostly within 25 min, while the GC solution showed a concentration of converged stations within the 15–35 min range. Including additional systems strengthened the satellite spatial geometry, leading to a noticeable reduction in PPP-AR convergence time. After applying multipath correction, approximately 47.8% of the stations achieved convergence within 20 min for GPS-only PPP-AR. Furthermore, the convergence performance of the GC solution showed substantial improvement, with most stations converging within 20 min, outperforming the GE results. Notably, the convergence time of the GC solution was significantly reduced after multipath correction. These findings are consistent with the residual processing results discussed in
Section 3. The results indicated that multipath correction has a conspicuous impact on the convergence time for PPP-AR, particularly for the GEC combination solution, with approximately 80% of stations achieving convergence within 10 min after applying MHM
.
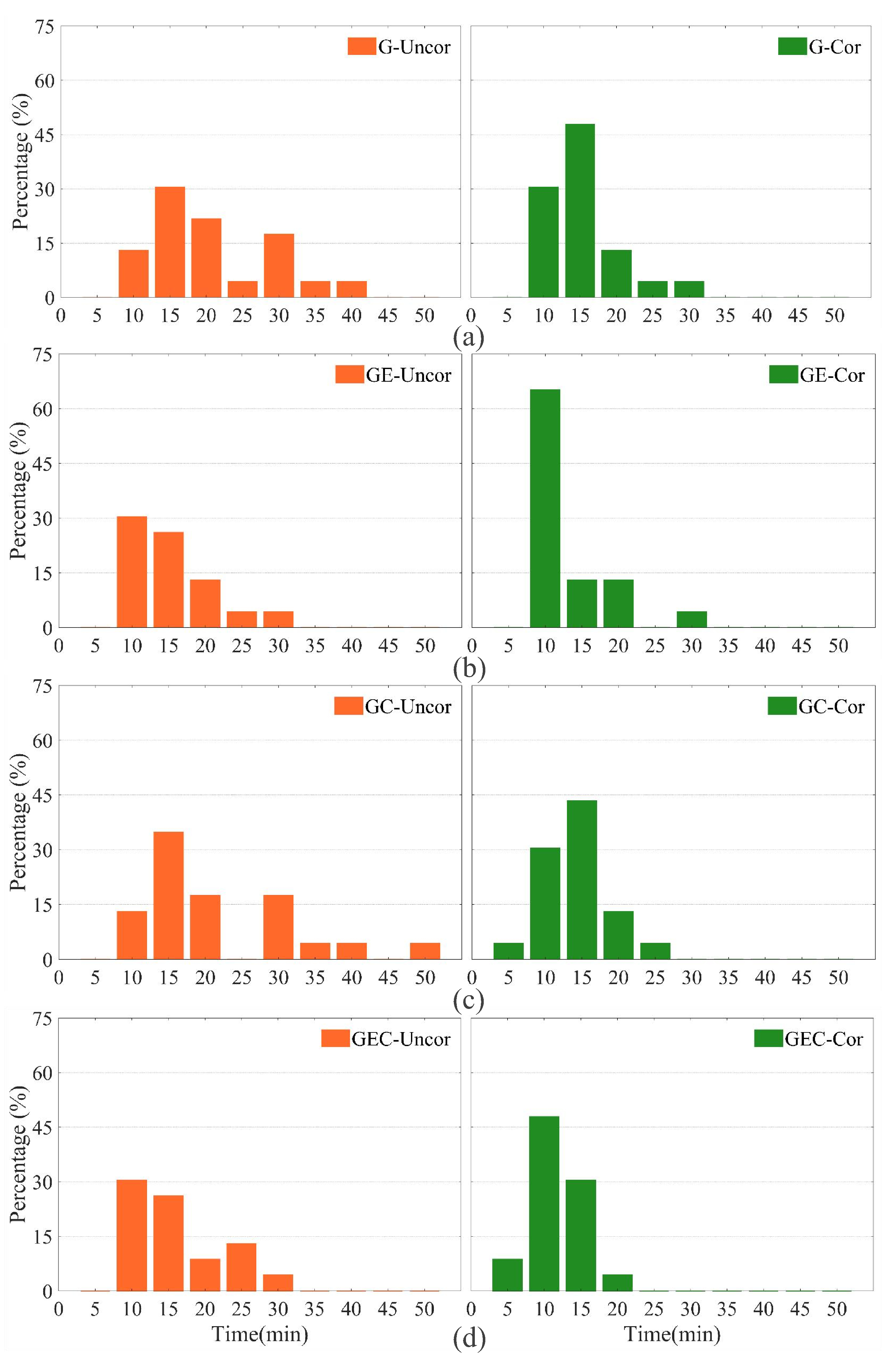
Similarly, the convergence results of static PPP-AR are illustrated in
Figure 8. A comparison between
Figure 7 and
Figure 8 demonstrates that, across all schemes, the static convergence time was significantly shorter compared to the kinematic case. It is noteworthy that the impact of multipath correction on the static results was more consistent and stable across all stations. For instance, before applying multipath correction, the convergence time for the GPS-only PPP-AR of all stations varied from 10 to 40 min. However, after implementing the correction, convergence was achieved within 30 min, with approximately 78.3% of stations achieving convergence within 15 min (although some stations still required 20 to 30 min for convergence). Similarly, for the GE scheme, the convergence time ranged from 10 to 30 min before multipath correction, but after correction, the convergence time was primarily concentrated within 10 min. For GC and GEC, with the application of enhanced multipath error correction, 4.35% and 8.7% of the stations achieved convergence of PPP-AR within 5 min, respectively.
The positioning accuracy was defined as the RMS of the positioning error from the 300th epoch (75 min) to the last epoch after the start of positioning. To evaluate the improvement in multipath correction on the PPP-AR, the positioning accuracies of the four schemes were calculated after convergence.
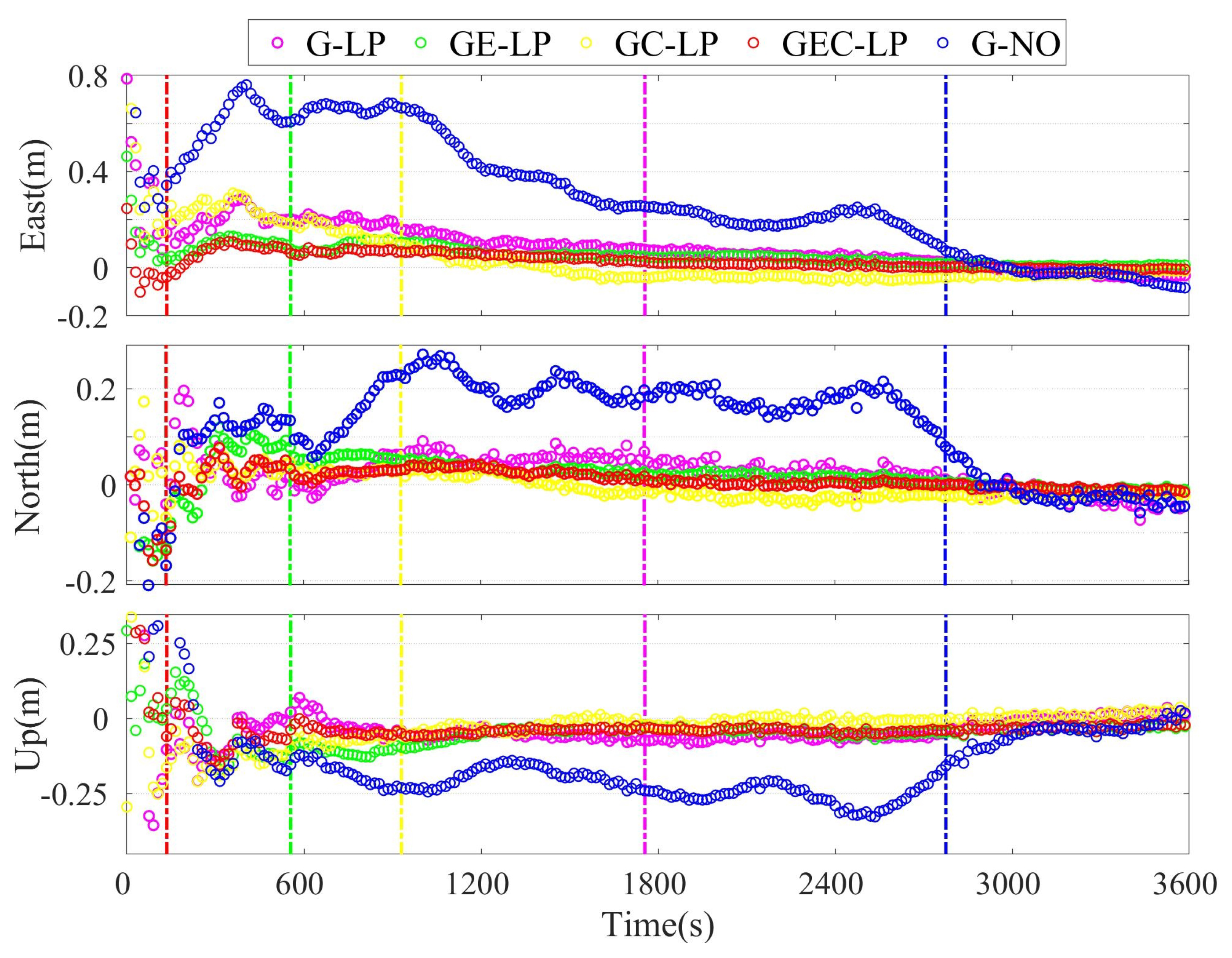
Figure 9 shows the kinematic PPP-AR positioning errors at station 2588 on DOY 267, 2021. There are fluctuations in the GPS-only positioning error series, and the maximum values of the east, north and up components reached 0.76, 0.27, and −0.33 cm, respectively. With multipath correction, the GPS PPP-AR 3D positioning accuracies improved from 1.2, 1.2, and 2.6 cm to 1.1, 0.8, and 2.5 cm, and the convergence time decreased from 46.3 to 29.3 min. It is worth noting that the corrected GEC results achieved accuracies of 0.7, 0.8, and 1.5 cm within 2.3 min, significantly outperforming the other cases.
Table 6 presents the statistics of the average PPP-AR positioning accuracies of the 23 stations. For GPS-only solutions, they were 1.42, 1.30, and 2.97 cm for the east, north, and up components. After multipath correction, the 3D accuracies were further improved by 18.3%, 15.4%, and 14.1%, to 1.16, 1.10, and 2.55 cm, respectively. Multipath correction had the most pronounced improvement for GEC, whose average positioning accuracy was improved by 30.2%, 4%, and 16.2% compared to GPS-only, GE, and GC, respectively.
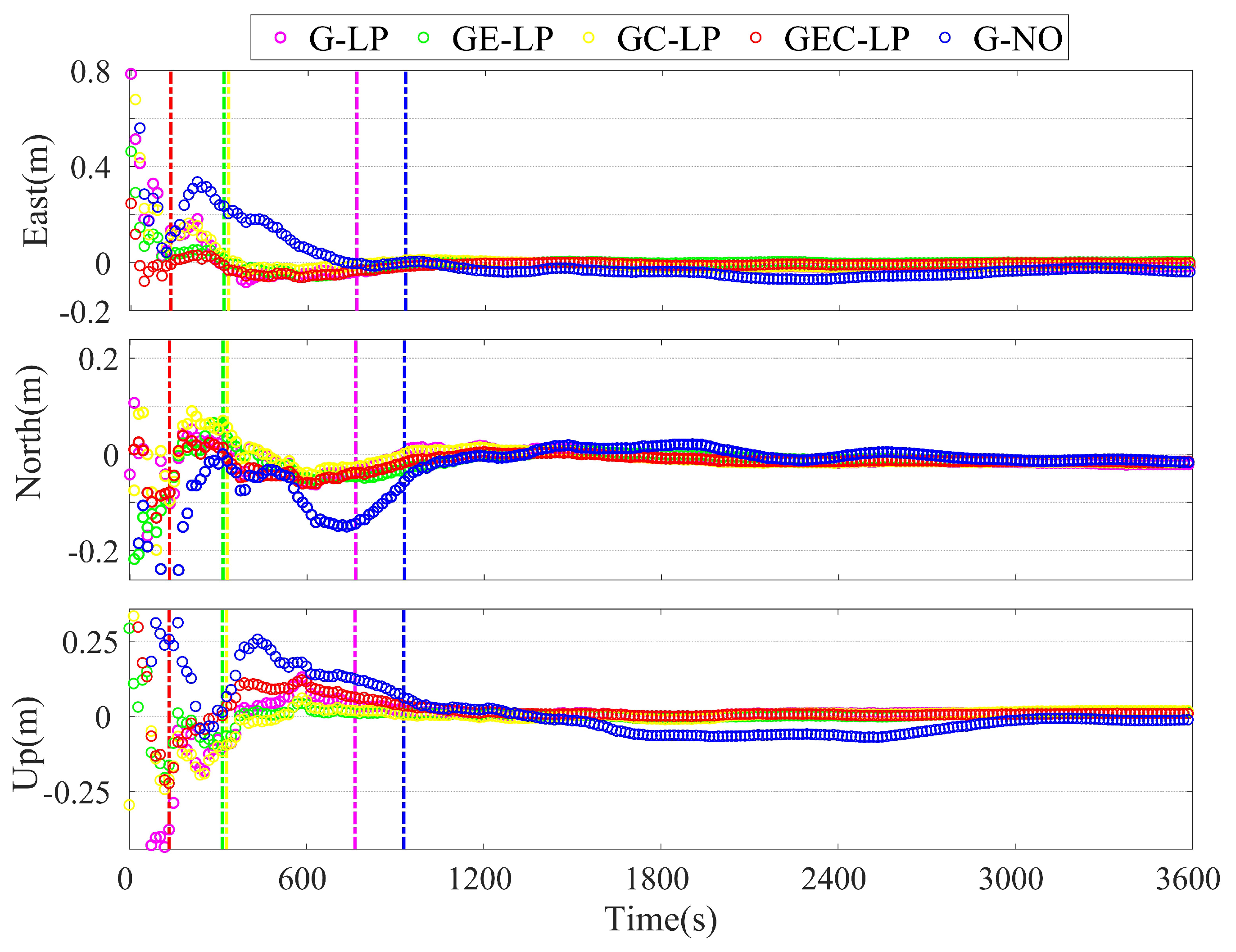
The effectiveness of multipath correction in the static PPP-AR positioning mode was assessed.
Figure 10 displays the 3D positioning errors of the static PPP-AR at station 2588 on DOY 267, 2021.
Table 7 presents the positioning accuracy statistics for all 23 stations. Compared with kinematic PPP-AR, static PPP-AR required less time to achieve convergence and a had better positioning accuracy. As shown, for GEC PPP-AR, the positioning accuracy improved significantly after multipath correction, which was ameliorated by 10.7%, 6.3%, and 45.4% to 0.50, 0.30, and 0.71 cm, respectively. Multipath correction significantly enhanced the positioning accuracy of the schemes, particularly in the vertical component. This improvement can be attributed to the fact that ambiguity resolution mainly contributed to the horizontal direction, where a high level of accuracy had already been achieved [
3].
Table 8 lists the fixing rates of the different positioning combinations PPP-AR. The fixing rate is defined as the ratio of the fixed epoch number to the total number of epochs. It can be seen from the table that the improvement in fixing rates for kinematic and static PPP-AR due to multipath correction was minimal. However, a comparison of the different positioning combinations leads to the conclusion that a more favorable satellite geometric distribution had a more pronounced impact on enhancing the fixed rates.
We compared the positioning errors over consecutive days from DOY263 to DOY267 and calculated their Pearson correlation coefficients. Due to a higher accuracy in the east direction, the error correlation between different days was stronger compared to the other two directions. After the correction of multipath effects, the similarity in errors among the three directions decreased by approximately 0.3, to 0.5. These findings indicate that the periodic errors in the positioning accuracy were effectively reduced.














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}