
Rover Attitude and Camera Parameter: Rock Measurements on Mars Surface Based on Rover Attitude and Camera Parameter for Tianwen-1 Mission

Abstract
:
1. Introduction
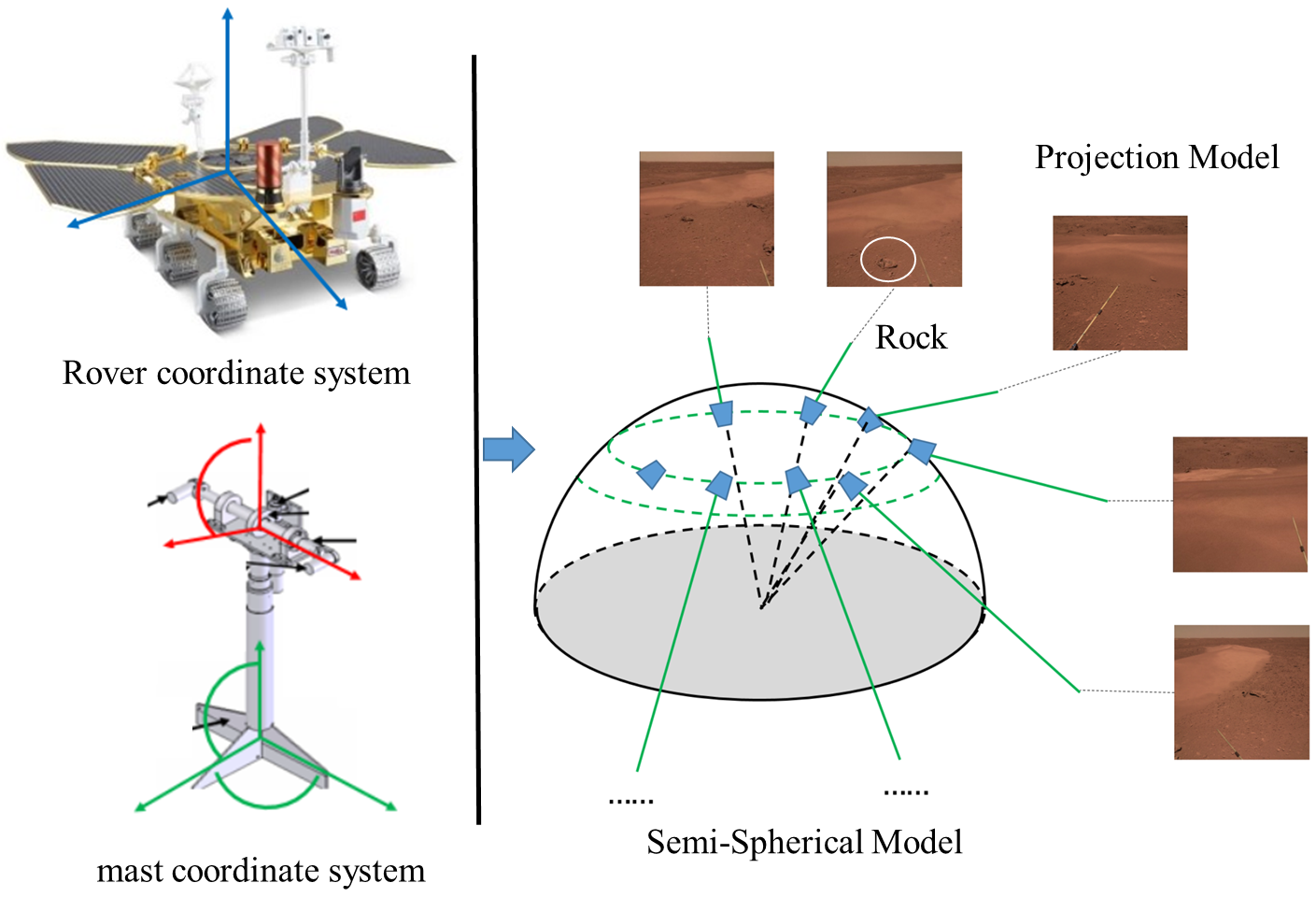
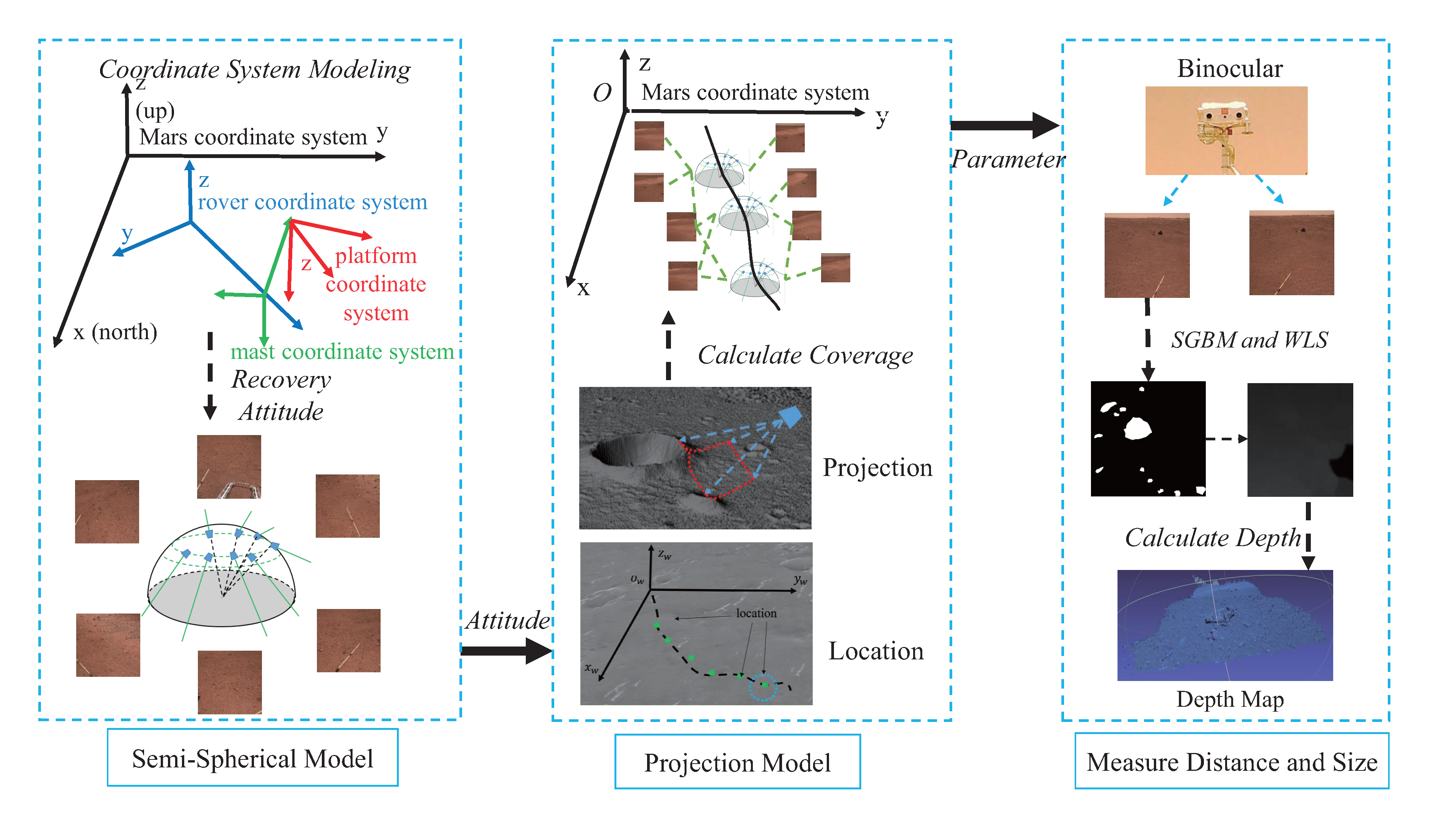
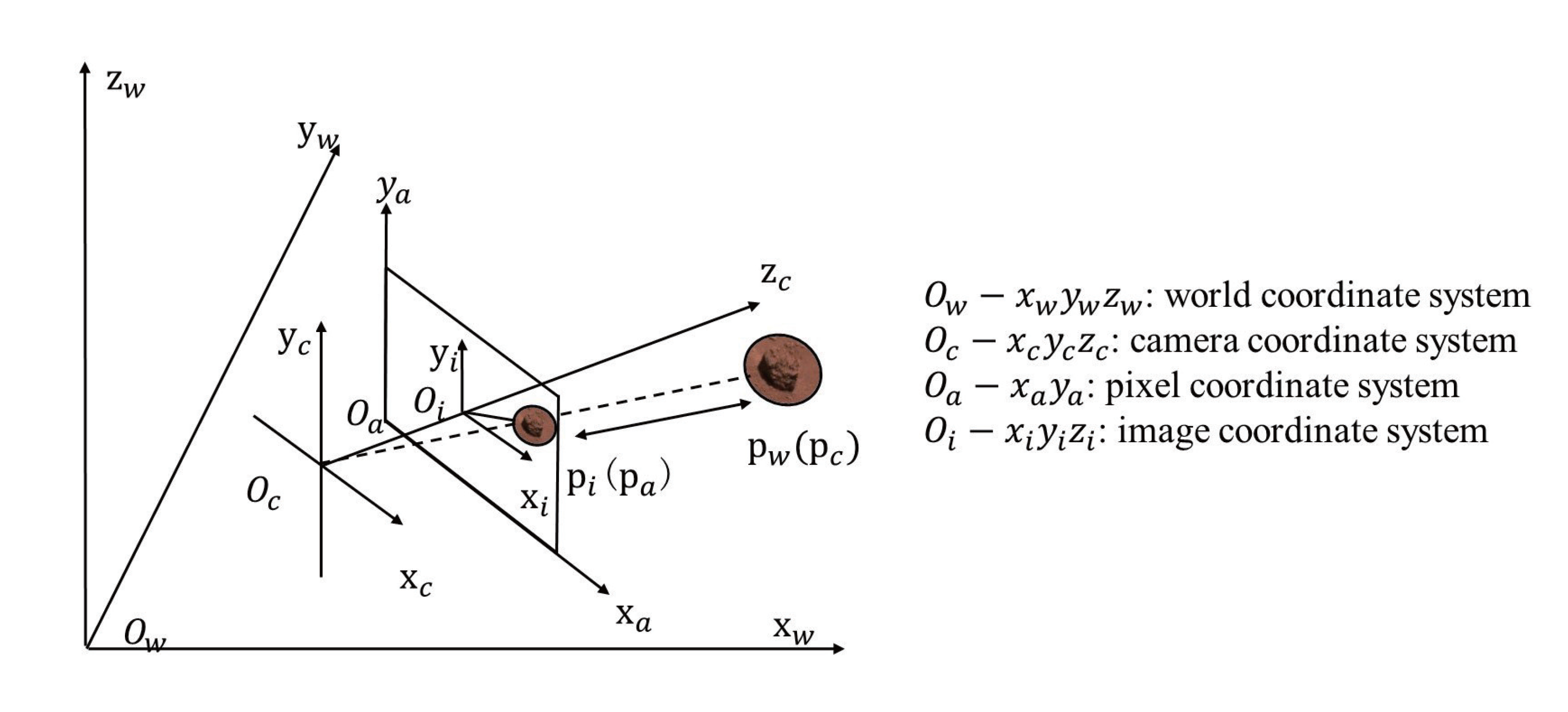
- A semi-spherical model and projection model are introduced to describe the relationship between the rover’s attitude, picture data, and the surface of Mars. The regular raster images are expressed in the Mars coordinate system based on the camera specifications and the mechanical structure of the rover.
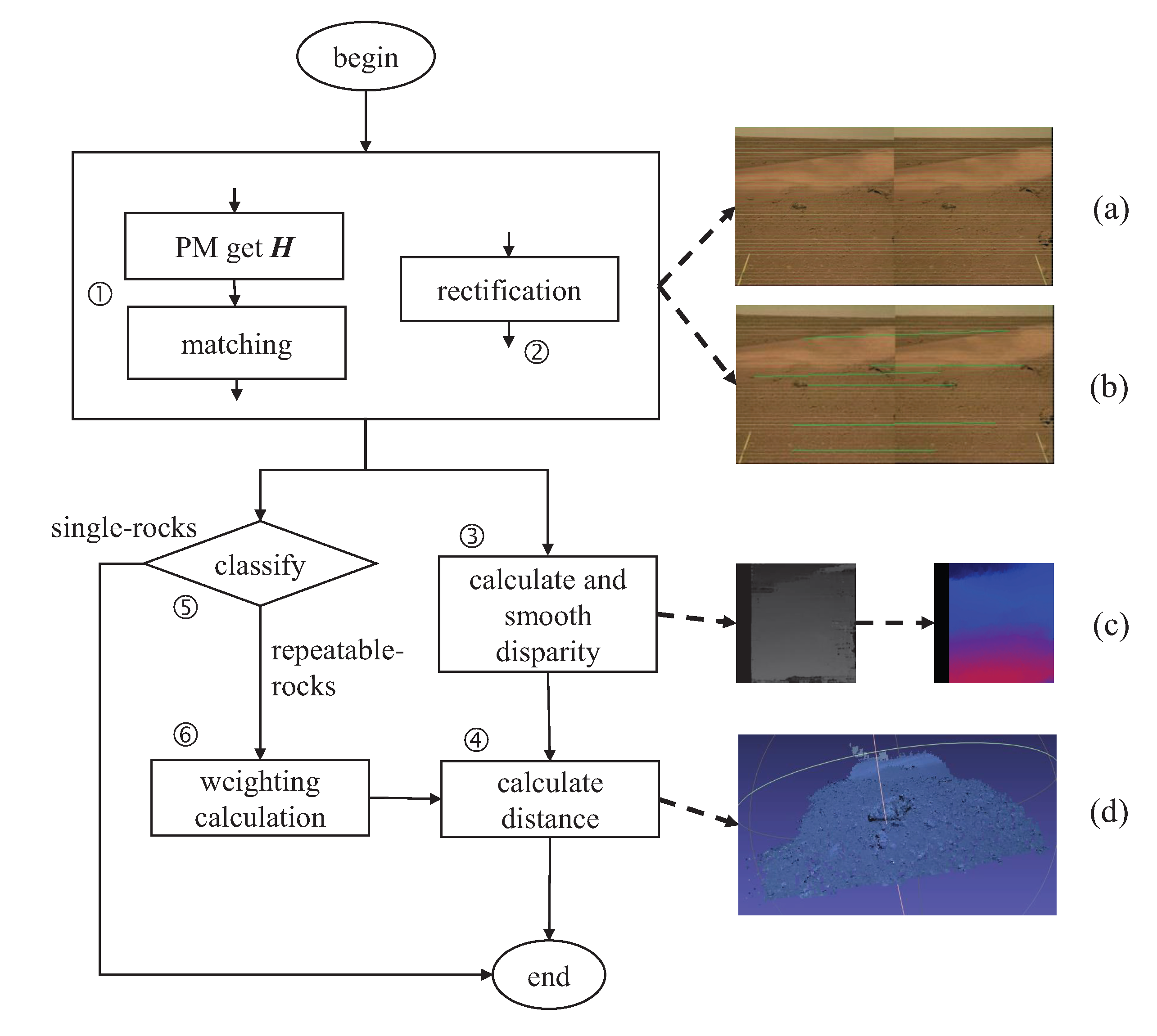
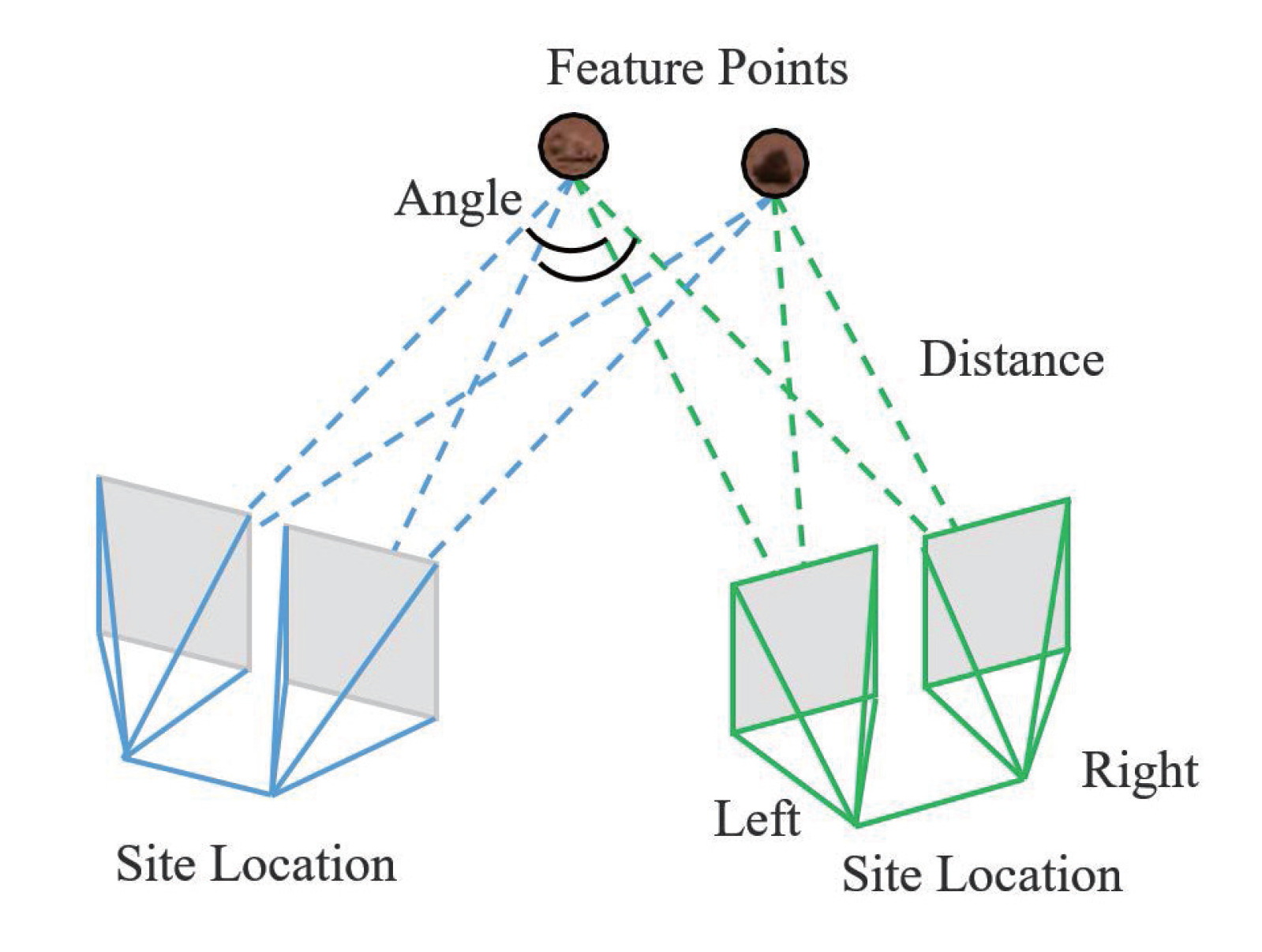
- We develop an RACP for measuring the distance and size of Martian rocks, combining an SSM and PM. In the SSM and PM, the rotation matrix, translation vector, and other parameters between images are calculated, and the disparity matching method utilizes these parameters.
- The experimental results show that the method we propose can effectively and accurately measure the distance and size of Martian rocks. The results include the distance, size, and location distribution of Martian rocks, based on NaTeCam images.
2. Materials and Methods
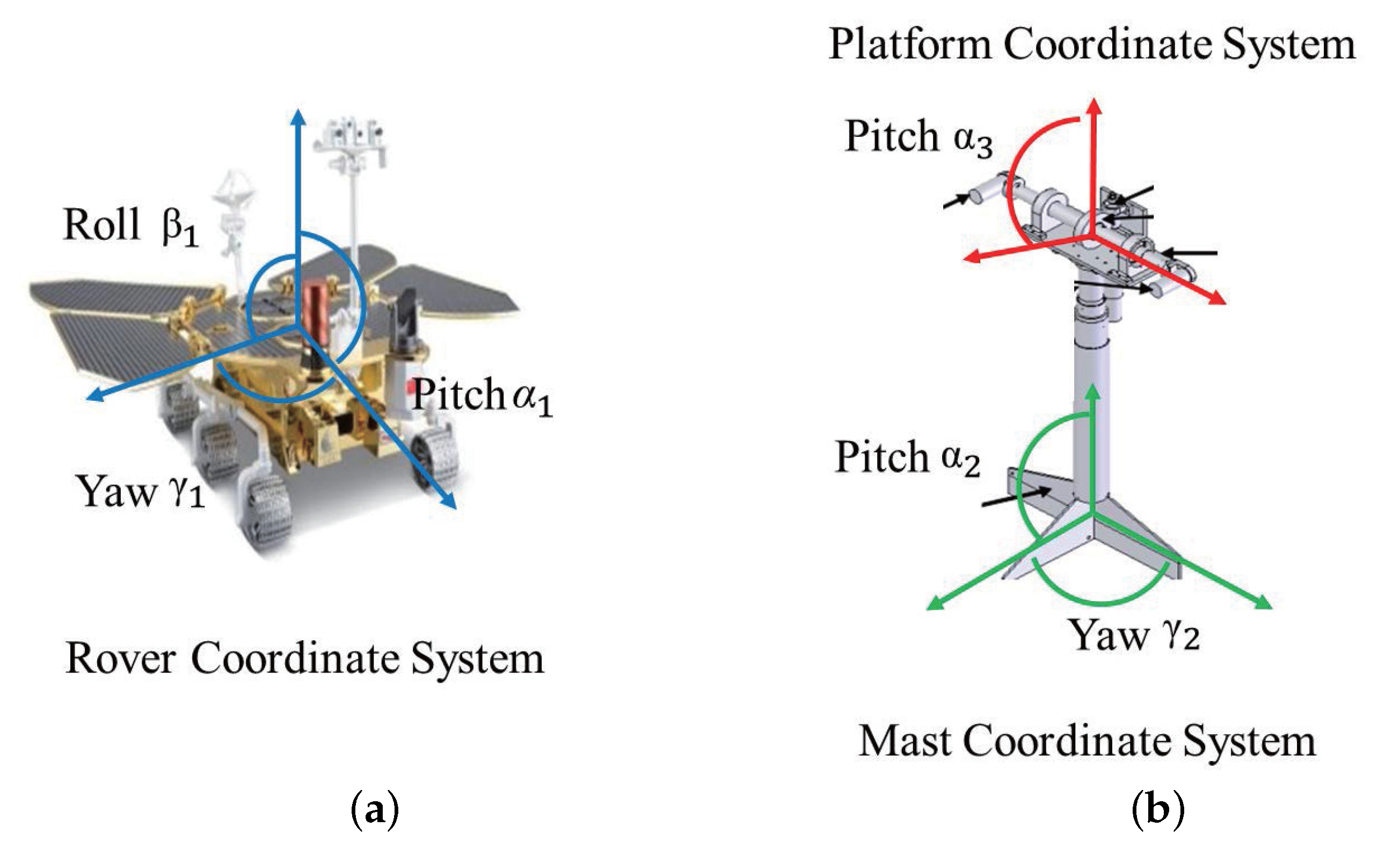
2.1. Zhurong Rover Structure and NaTeCam
2.2. Semi-Spherical Model for Zhurong Rover
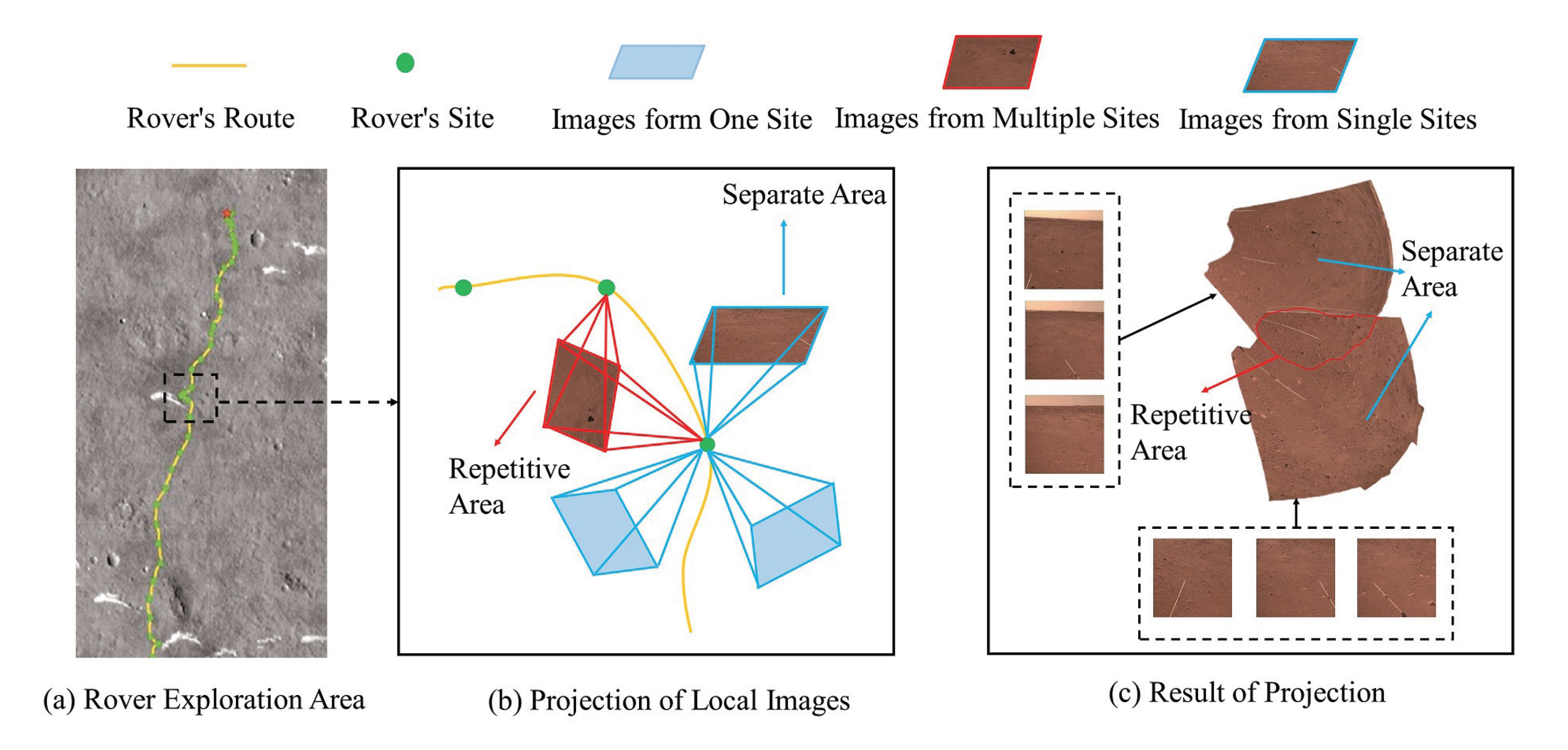
2.3. Projection Model
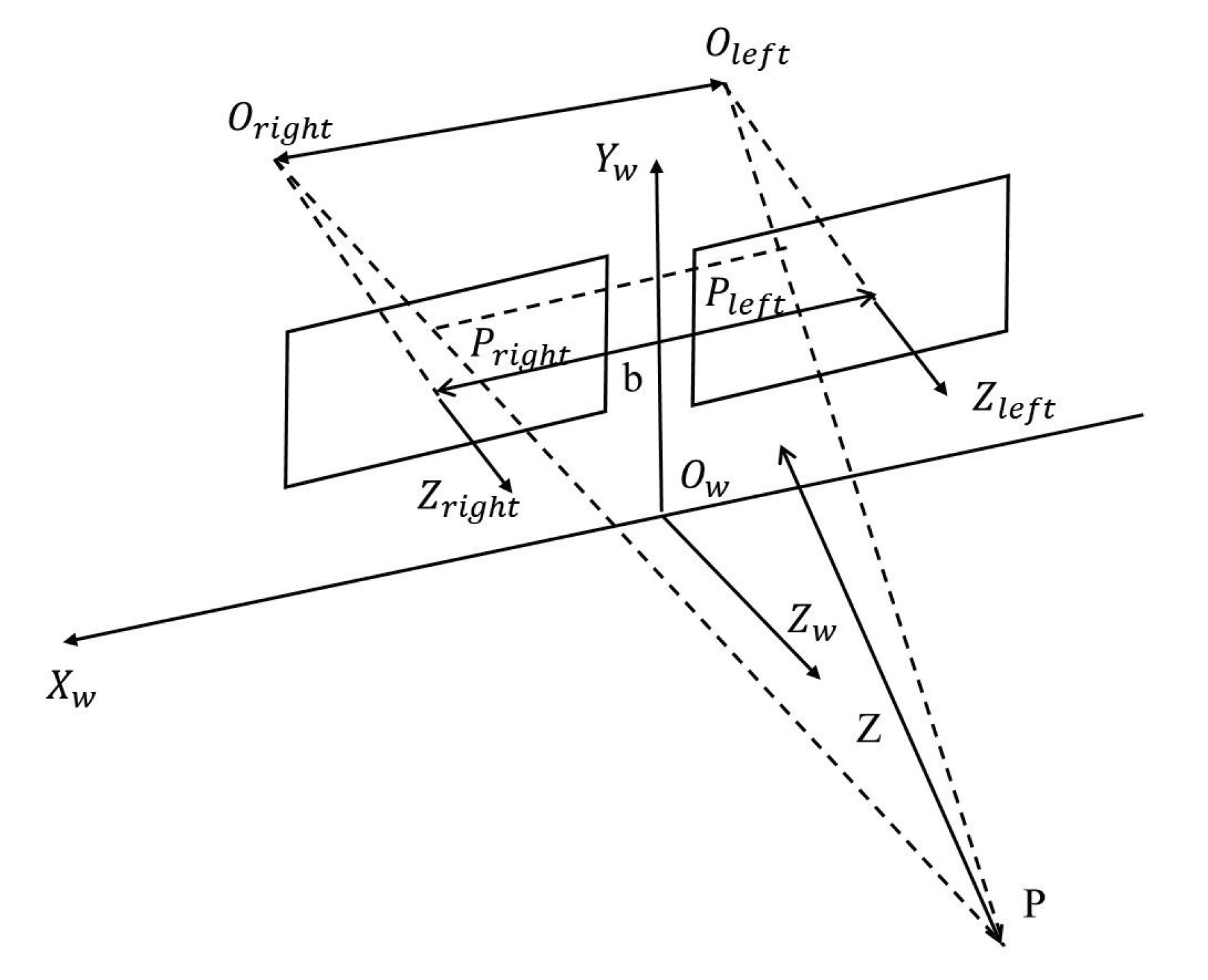
2.4. Measuring Distance Based on PM
2.5. Measuring Size Based on PM
3. Results
3.1. NaTeCam Datasets from Tianwen-1 Mission
3.2. Result of Measuring Distance
3.3. Result of Measuring Size
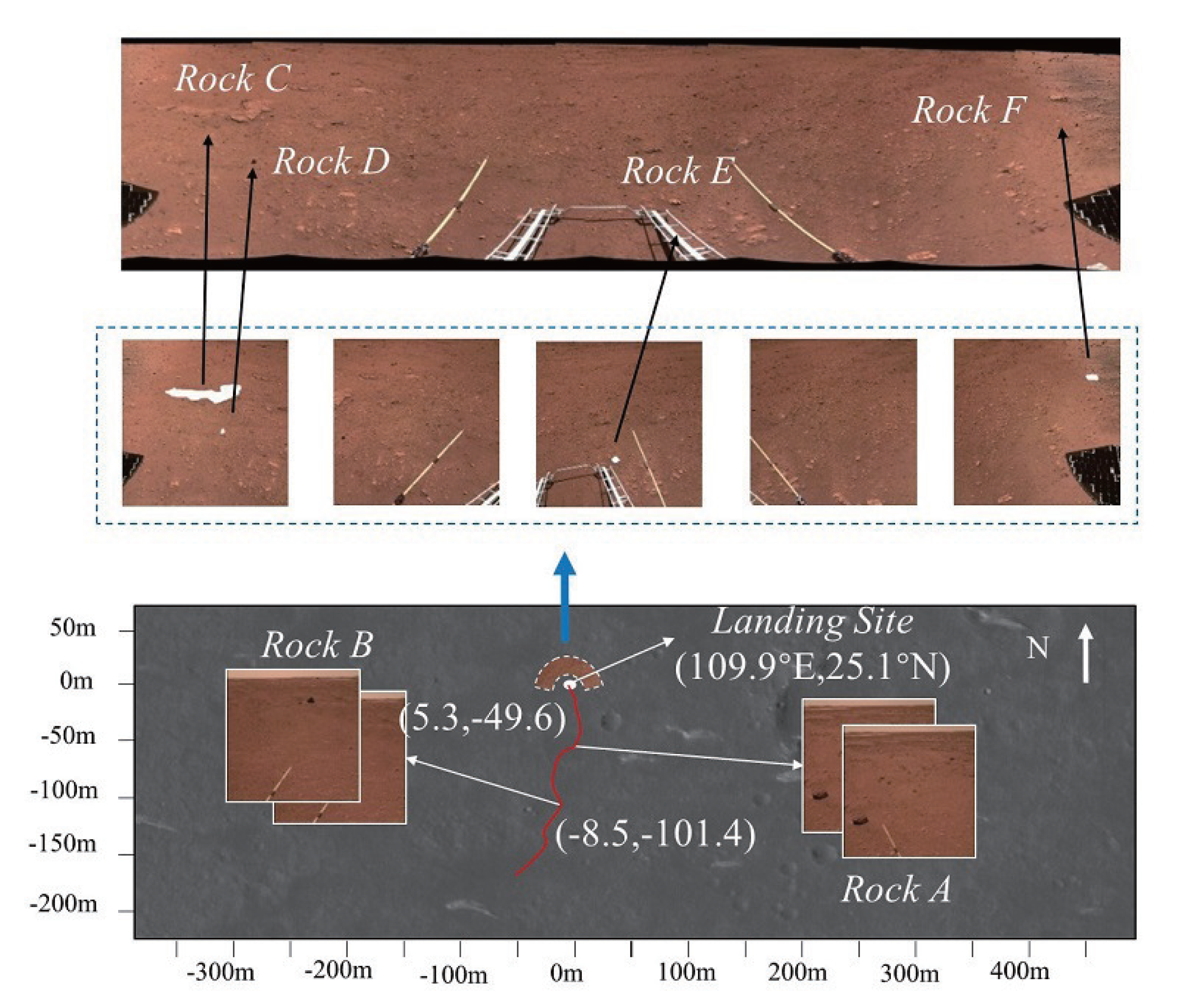
3.4. Distribution of Rocks
4. Discussion
4.1. Errors from Rover
4.2. Errors from Pinhole Model
4.3. Errors from Image Matching Error
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Golombek, M.P.; Haldemann, A.F.C.; Forsberg-Taylor, N.K.; DiMaggio, E.N.; Schroeder, R.D.; Jakosky, B.M.; Mellon, M.T.; Matijevic, J.R. Rock size-frequency distributions on Mars and implications for Mars Exploration Rover landing safety and operations. J. Geophys. Res.-Planets 2003, 108, 23. [Google Scholar] [CrossRef]
- Grant, J.A.; Golombek, M.P.; Wilson, S.A.; Farley, K.A.; Williford, K.H.; Chen, A. The science process for selecting the landing site for the 2020 Mars rover. Planet Space Sci. 2018, 164, 106–126. [Google Scholar] [CrossRef]
- Farley, K.A.; Williford, K.H.; Stack, K.M.; Bhartia, R.; Chen, A.; de la Torre, M.; Hand, K.; Goreva, Y.; Herd, C.D.K.; Hueso, R.; et al. Mars 2020 Mission Overview. Space Sci. Rev. 2020, 216, 41. [Google Scholar] [CrossRef]
- Zhang, T.Y.; Peng, S.; Jia, Y.; Tian, H.; Sun, J.K.; Yan, C.L. Slip Estimation for Mars Rover Zhurong Based on Data Drive. Appl. Sci. 2022, 12, 16. [Google Scholar] [CrossRef]
- Perseverance Has a Pet Rock! Available online: https://mars.nasa.gov/mars2020/mission/status/384/perseverance-has-a-pet-rock/ (accessed on 2 June 2022).
- Liu, Y.; Wu, X.; Zhao, Y.Y.S.; Pan, L.; Wang, C.; Liu, J.; Zhao, Z.X.; Zhou, X.; Zhang, C.L.; Wu, Y.C.; et al. Zhurong reveals recent aqueous activities in Utopia Planitia. Mars. Sci. Adv. 2022, 8, 7. [Google Scholar] [CrossRef] [PubMed]
- Fedo, C.M.; Bryk, A.B.; Edgar, L.A.; Bennett, K.A.; Fox, V.K.; Dietrich, W.E.; Banham, S.G.; Gupta, S.; Stack, K.M.; Williams, R.M.E.; et al. Geology and Stratigraphic Correlation of the Murray and Carolyn Shoemaker Formations Across the Glen Torridon Region, Gale Crater, Mars. J. Geophys. Res. Planets 2022, 127, 19. [Google Scholar] [CrossRef]
- Wu, B.; Dong, J.; Wang, Y.R.; Li, Z.J.; Chen, Z.Y.; Liu, W.C.; Zhu, J.M.; Chen, L.; Li, Y.; Rao, W. Characterization of the Candidate Landing Region for Tianwen-1-China’s First Mission to Mars. Earth Space Sci. 2021, 8, 19. [Google Scholar] [CrossRef]
- Wang, J.; Hu, G.; Cui, X.; Cheng, Z.; Liu, S.; Zhang, Z.; Han, S.; Xu, Q.; Huang, Z.; Gou, S. Applications of Photogrammetry and Remote Sensing Technologies in Tianwen-1 Mission. In Proceedings of the Chinese Conference on Image and Graphics Technologies, Beijing, China, 23–24 April 2022; pp. 277–291. [Google Scholar]
- Nagle-McNaughton, T.P.; Scuderi, L.A.; Erickson, N. Squeezing Data from a Rock: Machine Learning for Martian Science. Geosciences 2022, 12, 248. [Google Scholar] [CrossRef]
- Meyer, L.; Smisek, M.; Villacampa, A.F.; Maza, L.O.; Medina, D.; Schuster, M.J.; Steidle, F.; Vayugundla, M.; Muller, M.G.; Rebele, B.; et al. The MADMAX data set for visual-inertial rover navigation on mars. J. Field Robot. 2021, 38, 833–853. [Google Scholar] [CrossRef]
- Meng, Q.Y.; Wang, D.; Wang, X.D.; Li, W.; Yang, X.W.; Yan, D.J.; Li, Y.; Cao, Z.R.; Ji, Q.; Sun, T.Y.; et al. High Resolution Imaging Camera (HiRIC) on China’s First Mars Exploration Tianwen-1 Mission. Space Sci. Rev. 2021, 217, 29. [Google Scholar] [CrossRef]
- Yu, G.; Liu, E.; Liu, G.; Zhou, L.; Zeng, J.Z.; Chen, Y.P.; Zhou, X.D.; Zhao, R.J.; Zhu, S.Y. Moderate Resolution Imaging Camera (MoRIC) of China’s First Mars Mission Tianwen-1. Earth Planet. Phys. 2020, 4, 364–370. [Google Scholar]
- Li, Y.; Wu, B. Analysis of Rock Abundance on Lunar Surface From Orbital and Descent Images Using Automatic Rock Detection. J. Geophys. Res.-Planets 2018, 123, 1061–1088. [Google Scholar] [CrossRef]
- Chen, Z.Y.; Wu, B.; Wang, Y.R.; Liu, S.; Li, Z.J.; Yang, C.Y.; Dong, J.; Rao, W. Rock Abundance and Erosion Rate at the Zhurong Landing Site in Southern Utopia Planitia on Mars. Earth Space Sci. 2022, 9, 18. [Google Scholar] [CrossRef]
- Wan, W.H.; Yu, T.Y.; Di, K.C.; Wang, J.; Liu, Z.Q.; Li, L.C.; Liu, B.; Wang, Y.X.; Peng, M.; Bo, Z.; et al. Visual Localization of the Tianwen-1 Lander Using Orbital, Descent and Rover Images. Remote Sens. 2021, 13, 12. [Google Scholar] [CrossRef]
- Wu, B.; Dong, J.; Wang, Y.R.; Rao, W.; Sun, Z.Z.; Li, Z.J.; Tan, Z.Y.; Chen, Z.Y.; Wang, C.; Liu, W.C.; et al. Landing Site Selection and Characterization of Tianwen-1 (Zhurong Rover) on Mars. J. Geophys. Res.-Planets 2022, 127, 17. [Google Scholar] [CrossRef]
- Li, Z.J.; Wu, B.; Liu, W.C.; Chen, L.; Li, H.L.; Dong, J.; Rao, W.; Wang, D.; Meng, Q.Y.; Dong, J.H. Photogrammetric Processing of Tianwen-1 HiRIC Imagery for Precision Topographic Mapping on Mars. IEEE Trans. Geosci. Remote Sens. 2022, 60, 16. [Google Scholar] [CrossRef]
- Zou, Y.L.; Zhu, Y.; Bai, Y.F.; Wang, L.G.; Jia, Y.Z.; Shen, W.H.; Fan, Y.; Liu, Y.; Wang, C.; Zhang, A.B.; et al. Scientific objectives and payloads of Tianwen-1, China’s first Mars exploration mission. Adv. Space Res. 2021, 67, 812–823. [Google Scholar] [CrossRef]
- Liang, X.; Chen, W.L.; Cao, Z.X.; Wu, F.Z.; Lyu, W.Z.; Song, Y.Z.; Li, D.F.; Yu, C.W.; Zhang, L.; Wang, L. The Navigation and Terrain Cameras on the Tianwen-1 Mars Rover. Space Sci. Rev. 2021, 217, 20. [Google Scholar] [CrossRef]
- Maki, J.; Thiessen, D.; Pourangi, A.; Kobzeff, P.; Litwin, T.; Scherr, L.; Elliott, S.; Dingizian, A.; Maimone, M. The Mars Science Laboratory Engineering Cameras. Space Sci. Rev. 2012, 170, 77–93. [Google Scholar] [CrossRef]
- Maurice, S.; Wiens, R.C.; Bernardi, P.; Cais, P.; Robinson, S.; Nelson, T.; Gasnault, O.; Reess, J.M.; Deleuze, M.; Rull, F.; et al. The SuperCam Instrument Suite on the Mars 2020 Rover: Science Objectives and Mast-Unit Description. Space Sci. Rev. 2021, 217, 108. [Google Scholar] [CrossRef]
- Zhang, H.; Lu, H.; Yu, T.Y.; Xie, Y.; Wang, C.; Bao, S.; Hu, X.D. Teleoperation Technology of Zhurong Mars Rover. Deep Space Explor. 2021, 8, 582–591. [Google Scholar]
- Gavrila, D.M.; Franke, U.; Wohler, C.; Gorzig, S. Real-time vision for intelligent vehicles. IEEE Instrum. Meas. Mag. 2001, 4, 22–27. [Google Scholar] [CrossRef]
- Matthies, L.; Huertas, A.; Cheng, Y.; Johnson, A. Stereo vision and shadow analysis for landing hazard detection. In Proceedings of the IEEE International Conference on Robotics and Automation, Pasadena, CA, USA, 19–23 May 2008; pp. 2735–2742. [Google Scholar]
- Hirschmüller, H. Accurate and efficient stereo processing by semi-global matching and mutual information. In Proceedings of the IEEE Computer Society Conference on Computer Vision and Pattern Recognition (CVPR’05), San Diego, CA, USA, 20–26 June 2005; Volume 2, pp. 807–814. [Google Scholar]
- Hirschmuller, H. Stereo processing by Semiglobal Matching and Mutual Information. IEEE Trans. Pattern Anal. Mach. Intell. 2008, 30, 328–341. [Google Scholar] [CrossRef] [PubMed]
- Kallwies, J.; Engler, T.; Forkel, B.; Wuensche, H.J.; Soc, I.C. Triple-SGM: Stereo Processing using Semi-Global Matching with Cost Fusion. In Proceedings of the 2020 IEEE Winter Conference on Applications of Computer Vision (WACV), Snowmass, CO, USA, 1–5 March 2020; pp. 192–200. [Google Scholar]
- Schonberger, J.L.; Sinha, S.N.; Pollefeys, M. Learning to Fuse Proposals from Multiple Scanline Optimizations in Semi-Global Matching. In Proceedings of the 15th European Conference on Computer Vision (ECCV), Munich, Germany, 8–14 September 2018; pp. 758–775. [Google Scholar]
- Bethmann, F.; Luhmann, T. Object-Based Semi-global Multi-image Matching. PFG-J. Photogramm. Remote Sens. Geoinf. Sci. 2017, 85, 349–364. [Google Scholar] [CrossRef]
- Xue, T.; Qu, L.Q.; Wu, B. Matching and 3-D Reconstruction of Multibubbles Based on Virtual Stereo Vision. IEEE Trans. Instrum. Meas. 2014, 63, 1639–1647. [Google Scholar]
- Wang, H.Y.; Shi, Y.F.; Zhu, X.J.; Song, L.M.; Dong, F. 3-D Reconstruction of Bubble Flow Field Based on the Method of Multivision by Rough-Precise Location Algebraic Reconstruction Technique. IEEE Trans. Instrum. Meas. 2022, 71, 11. [Google Scholar] [CrossRef]
- Han, J.; Tao, J.; Wang, C.L. FlowNet: A Deep Learning Framework for Clustering and Selection of Streamlines and Stream Surfaces. IEEE Trans. Vis. Comput. Graph. 2020, 26, 1732–1744. [Google Scholar] [CrossRef]
- Li, Y.X.; Lu, Z.C.; Xiong, X.H.; Huang, J.; Soc, I.C. PERF-Net: Pose Empowered RGB-Flow Net. In Proceedings of the 22nd IEEE/CVF Winter Conference on Applications of Computer Vision (WACV), Waikoloa, HI, USA, 4–8 January 2022; pp. 798–807. [Google Scholar]
- Li, M.J.; Sun, C.K.; Fu, L.H.; Wang, P. A Robust 3-D Reconstruction Approach Based on Correspondence Retrieval Using Deep Image Prior. IEEE Trans. Instrum. Meas. 2023, 72, 12. [Google Scholar] [CrossRef]
- Wan, W.X.; Wang, C.; Li, C.L.; Wei, Y. China’s first mission to Mars. Nat. Astron. 2020, 4, 721. [Google Scholar] [CrossRef]
- Liu, J.J.; Li, C.L.; Zhang, R.Q.; Rao, W.; Cui, X.F.; Geng, Y.; Jia, Y.; Huang, H.; Ren, X.; Yan, W.; et al. Geomorphic contexts and science focus of the Zhurong landing site on Mars. Nat. Astron. 2022, 6, 65–71. [Google Scholar] [CrossRef]
- Tan, X.; Liu, J.J.; Zhang, X.X.; Yan, W.; Chen, W.L.; Ren, X.; Zuo, W.; Li, C.L. Design and Validation of the Scientific Data Products for China’s Tianwen-1 Mission. Space Sci. Rev. 2021, 217, 22. [Google Scholar] [CrossRef]
- Li, C.L.; Zhang, R.Q.; Yu, D.Y.; Dong, G.L.; Liu, J.J.; Geng, Y.; Sun, Z.Z.; Yan, W.; Ren, X.; Su, Y.; et al. China’s Mars Exploration Mission and Science Investigation. Space Sci. Rev. 2021, 217, 24. [Google Scholar] [CrossRef]
- Lu, H.; Zhang, H.; Zhang, Z.; Tu, T.; Cui, X.; Hu, X.; Fei, L. Accuracy Mast Pointing Control Method for Multi-Spectral Camera Exploration of Mars Rover. Deep Space Explor. 2021, 10, 66–71. [Google Scholar]
- Ng, P.C.; Henikoff, S. SIFT: Predicting amino acid changes that affect protein function. Nucleic Acids Res. 2003, 31, 3812–3814. [Google Scholar] [CrossRef]
- Bay, H.; Tuytelaars, T.; Van Gool, L. SURF: Speeded Up Robust Features. In Proceedings of the 9th European Conference on Computer Vision (ECCV), Graz, Austria, 7–13 May 2006; pp. 404–417. [Google Scholar]
- Rublee, E.; Rabaud, V.; Konolige, K.; Bradski, G. ORB: An efficient alternative to SIFT or SURF. In Proceedings of the IEEE International Conference on Computer Vision (ICCV), Barcelona, Spain, 6–13 November 2011; pp. 2564–2571. [Google Scholar]
- Zheng, D.; Wei, L.H.; Liu, Y.; Wang, Y.M. MetaMars: 3DoF + Roaming With Panoramic Stitching for Tianwen-1 Mission. IEEE Geosci. Remote Sens. Lett. 2022, 19, 5. [Google Scholar] [CrossRef]
- Li, G.Q.; Geng, Y.H.; Xiao, X.M. Multi-scale rock detection on Mars. Sci. China-Inf. Sci. 2018, 61, 8. [Google Scholar] [CrossRef]
- Liu, W.k.; Wei, L.H.; Zheng, D.; Liu, Y.; Wang, Y.M. MarsNet: Automated Rock Segmentation with Transformers for Tianwen-1 Mission. IEEE Geosci. Remote Sens. Lett. 2022, 20, 3506605. [Google Scholar]
- Min, D.B.; Choi, S.; Lu, J.B.; Ham, B.; Sohn, K.; Do, M.N. Fast Global Image Smoothing Based on Weighted Least Squares. IEEE Trans. Image Process. 2014, 23, 5638–5653. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Number | Camera Position/m | Pixel Position | Measured Value/m | Wu [17] |
|---|---|---|---|---|
| A1 | [−3.763, −56.040, 0.632] | [90, 342] | 4.37 | ∖ |
| A2 | [−3.709, −56.110, 0.599] | [103, 364] | 3.92 | ∖ |
| B1 | [4.596, −50.043, 2.360] | [337, 119] | 17.86 | ∖ |
| B2 | [4.558, −50.13, 2.358] | [126, 106] | 17.48 | ∖ |
| C | [0.590 , 0.185, 2.853] | [328, 155] | 9.88 | 10 m |
| D | [0.676, 0.204, 2.853] | [335, 280] | 6.38 | 6 m |
| E | [0.820, 0.112, 2.855] | [276, 368] | 5.21 | 5 m |
| F | [0.746, −0.118, 2.860] | [121, 121] | 10.82 | 10 m |
| Rock | Point | Index | Position/m | Size/m | Wu [17] |
|---|---|---|---|---|---|
| C | left | [150, 162] | [−1.400, −1.429, 9.024] | 3.47 | 3.2 m |
| right | [380, 150] | [2.070, −1.784, 9.999] | |||
| top | [329, 137] | [1.284, −2.111, 1.055] | 1.13 | ||
| bottom | [328, 187] | [1.010, −0.981, 8.416] | |||
| D | left | [342, 280] | [0.926, 0.251, 6.459] | 0.11 | 0.15 m |
| right | [331, 280] | [0.816, 0.253, 6.526] | |||
| top | [335, 287] | [0.819, 0.313, 6.218] | 0.14 | ||
| bottom | [335, 272] | [0.876, 0.169, 6.648] | |||
| E | left | [267, 367] | [0.094, 0.953, 5.175] | 0.18 | 0.18 m |
| right | [288, 369] | [0.272, 0.958, 5.112] | |||
| top | [276, 363] | [0.173, 0.906, 5.218] | 0.11 | ||
| bottom | [276, 374] | [0.169, 1.015, 5.080] |
| Date | Rock Number | Camera Position/m | Camera Angle/° | Measured Value/m | ||||
|---|---|---|---|---|---|---|---|---|
| x | y | z | Roll | Pitch | Yaw | |||
| 22 January 2022 | 1 | 143.303 | −1017.045 | 13.540 | 3.844 | −60.034 | −173.100 | 3.30 |
| 2 | 143.303 | −1017.045 | 13.540 | 3.844 | −60.034 | −173.100 | 2.90 | |
| 2 | 143.252 | −1016.955 | 13.540 | −39.160 | −50.421 | 135.509 | 2.86 | |
| 3 | 143.252 | −1016.955 | 13.540 | −39.160 | −50.421 | 135.509 | 2.94 | |
| 3 | 143.254 | −1016.852 | 13.539 | −56.061 | −28.049 | 109.156 | 2.96 | |
| 4 | 143.252 | −1016.955 | 13.540 | −39.160 | −50.421 | 135.509 | 2.69 | |
| 4 | 143.254 | −1016.852 | 13.539 | −56.061 | −28.049 | 109.156 | 2.73 | |
| 3 September 2021 | 5 | −95.672 | −900.315 | −6.800 | 72.512 | 29.125 | −82.262 | 5.25 |
| 6 | −95.672 | −900.315 | −6.800 | 72.512 | 29.125 | −82.262 | 6.72 | |
| 6 | −95.604 | −900.347 | −6.802 | 73.553 | 0.272 | −90.667 | 6.89 | |
| 7 | −95.604 | −900.347 | −6.802 | 73.553 | 0.272 | −90.667 | 4.89 | |
| 7 | −95.561 | −900.409 | −6.805 | 70.128 | −28.411 | −99.659 | 4.81 | |
| 8 | −95.587 | −900.552 | −6.810 | −1.802 | −72.421 | −179.269 | 7.22 | |
| 9 | −95.587 | −900.552 | −6.810 | −1.802 | −72.421 | −179.269 | 6.83 | |
| 10 | −95.587 | −900.552 | −6.810 | −1.802 | −72.421 | −179.269 | 6.53 | |
| 11 | −95.587 | −900.552 | −6.810 | −1.802 | −72.421 | −179.269 | 5.15 | |
| 11 | −95.649 | −900.595 | −6.811 | −59.565 | −55.335 | 119.393 | 5.10 | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zheng, D.; Wei, L.; Lv, W.; Liu, Y.; Wang, Y. Rover Attitude and Camera Parameter: Rock Measurements on Mars Surface Based on Rover Attitude and Camera Parameter for Tianwen-1 Mission. Remote Sens. 2023, 15, 4388. https://doi.org/10.3390/rs15184388
Zheng D, Wei L, Lv W, Liu Y, Wang Y. Rover Attitude and Camera Parameter: Rock Measurements on Mars Surface Based on Rover Attitude and Camera Parameter for Tianwen-1 Mission. Remote Sensing. 2023; 15(18):4388. https://doi.org/10.3390/rs15184388
Chicago/Turabian StyleZheng, Dian, Linhui Wei, Weikun Lv, Yu Liu, and Yumei Wang. 2023. "Rover Attitude and Camera Parameter: Rock Measurements on Mars Surface Based on Rover Attitude and Camera Parameter for Tianwen-1 Mission" Remote Sensing 15, no. 18: 4388. https://doi.org/10.3390/rs15184388
APA StyleZheng, D., Wei, L., Lv, W., Liu, Y., & Wang, Y. (2023). Rover Attitude and Camera Parameter: Rock Measurements on Mars Surface Based on Rover Attitude and Camera Parameter for Tianwen-1 Mission. Remote Sensing, 15(18), 4388. https://doi.org/10.3390/rs15184388