
Monitoring of Monthly Height Growth of Individual Trees in a Subtropical Mixed Plantation Using UAV Data


Abstract
:
1. Introduction
2. Materials and Methods
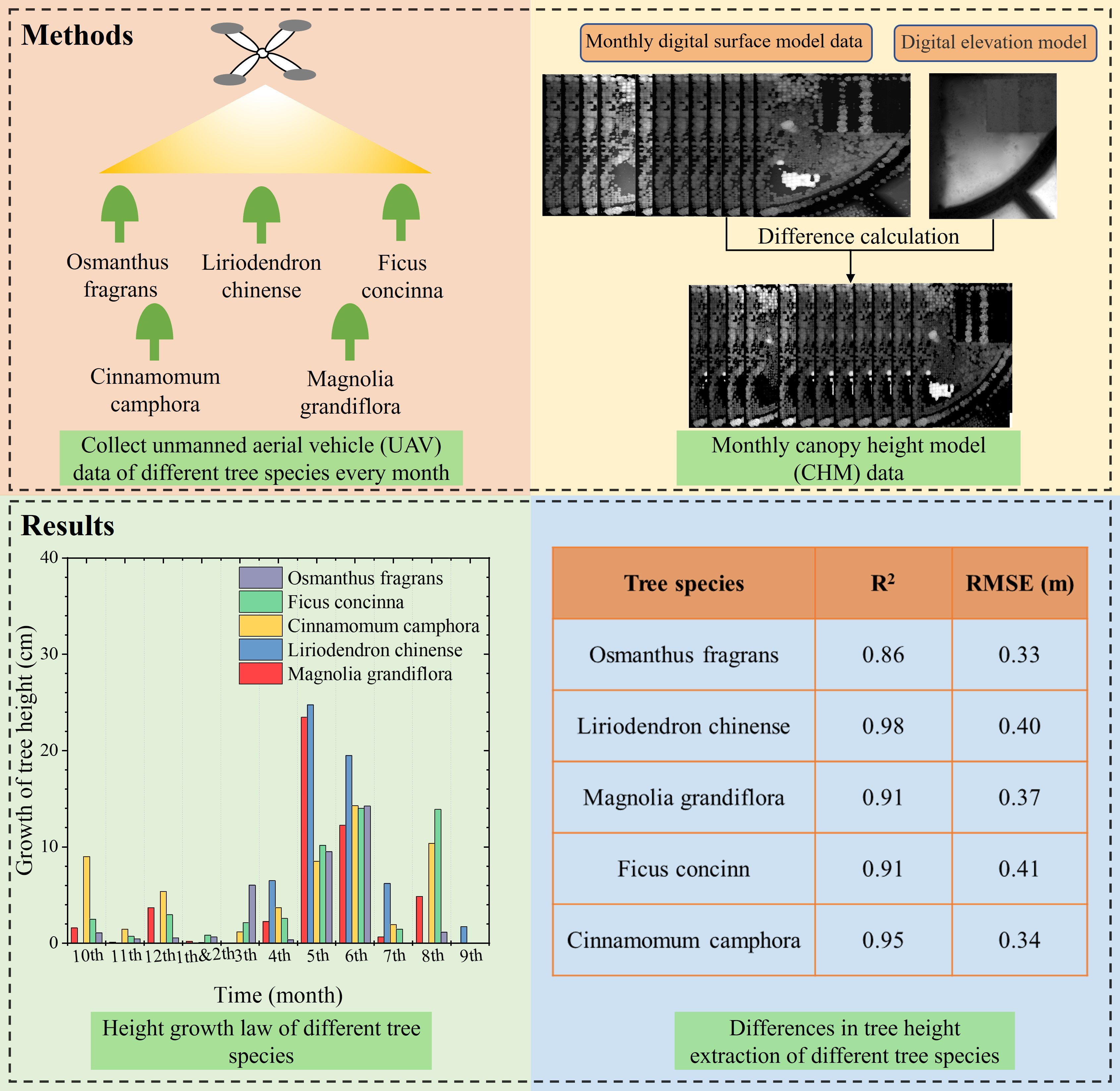
2.1. Study Area
2.2. Data Introduction
2.2.1. Field Data
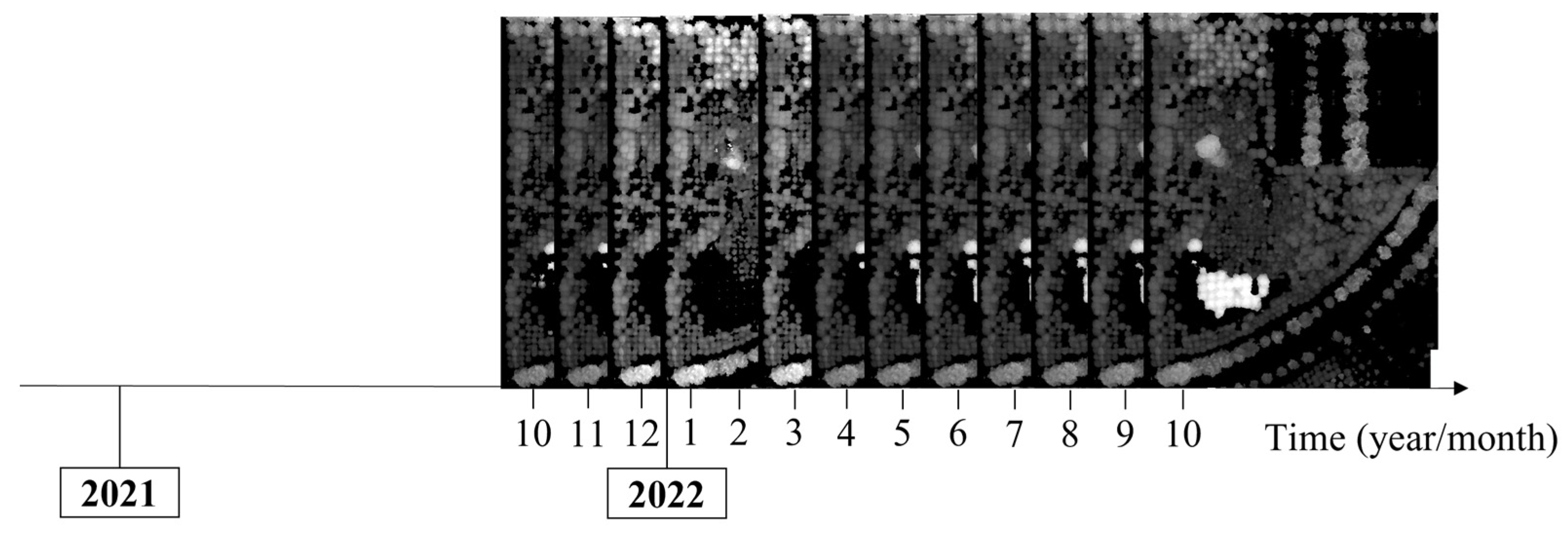
2.2.2. UAV Data
2.3. Method
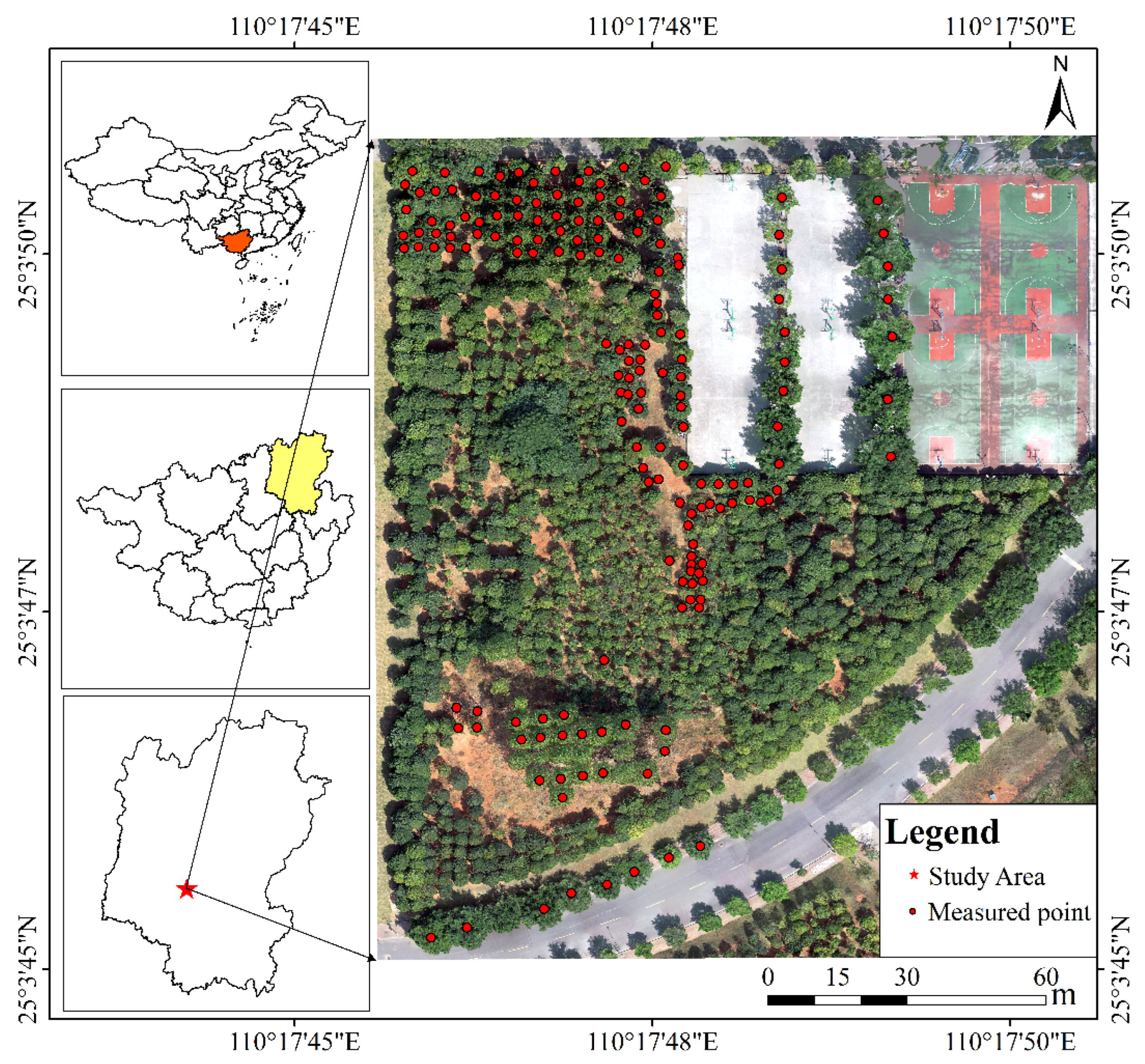
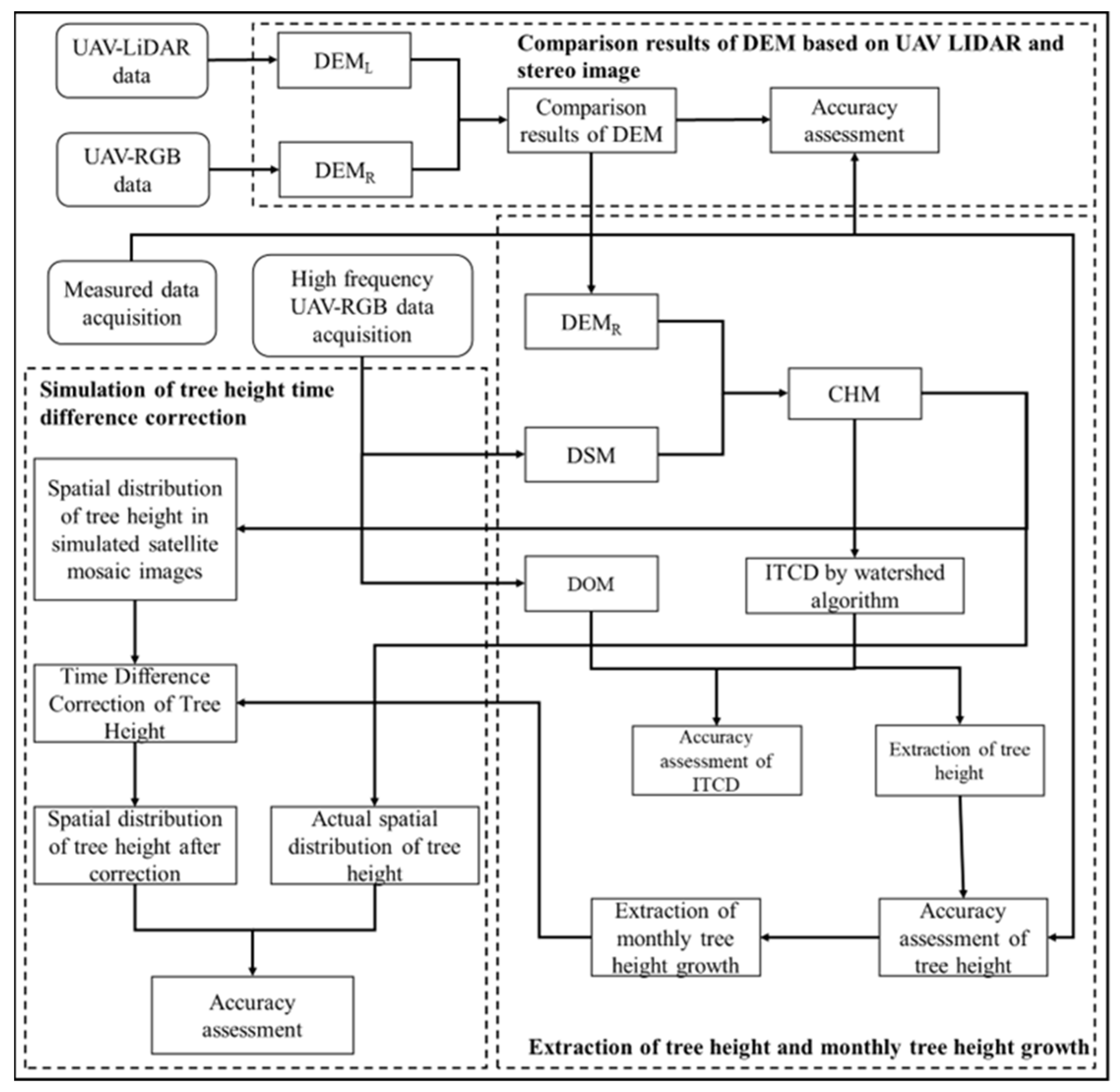
2.3.1. UAV Data Process
2.3.2. Individual Tree Crown Detection Method
2.3.3. Calculation of Tree Height and Monthly Tree Height Growth
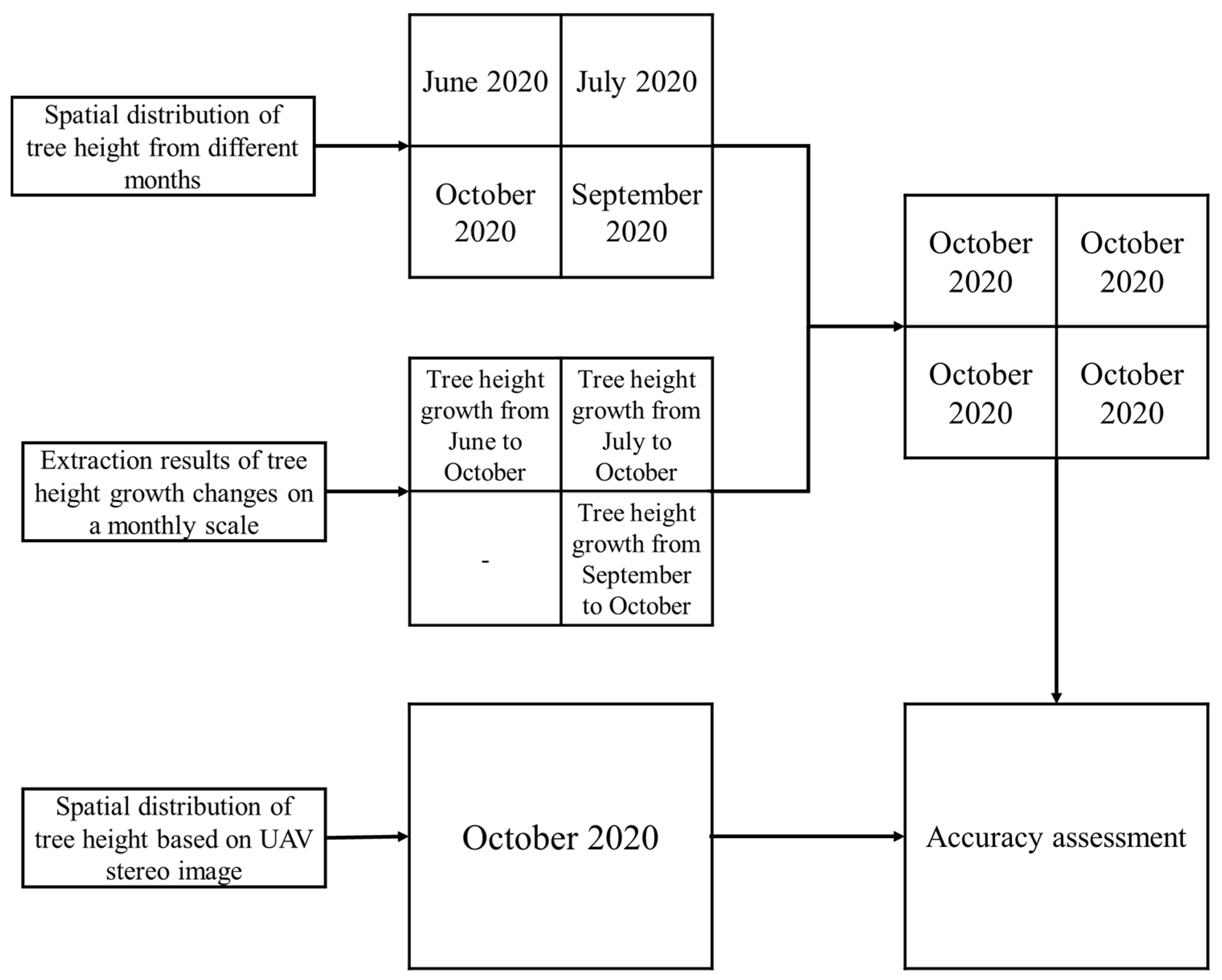
2.3.4. Simulation of Tree Height Time Difference Correction
2.3.5. Accuracy Evaluation
- (1)
- Accuracy Evaluation of DEM Data
- (2)
- Accuracy evaluation of Individual Tree Crown Delineation results
- (3)
- Accuracy evaluation of individual Tree Height Extraction Results
3. Results
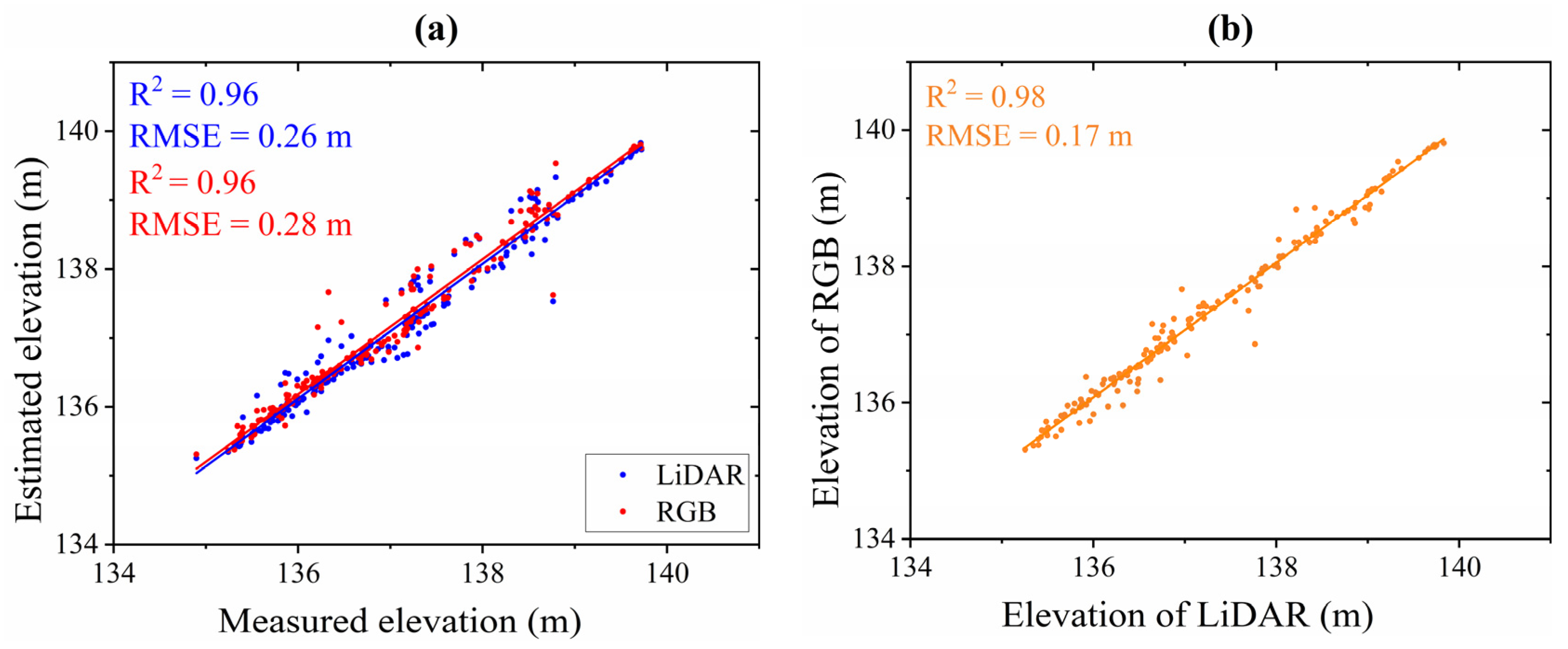
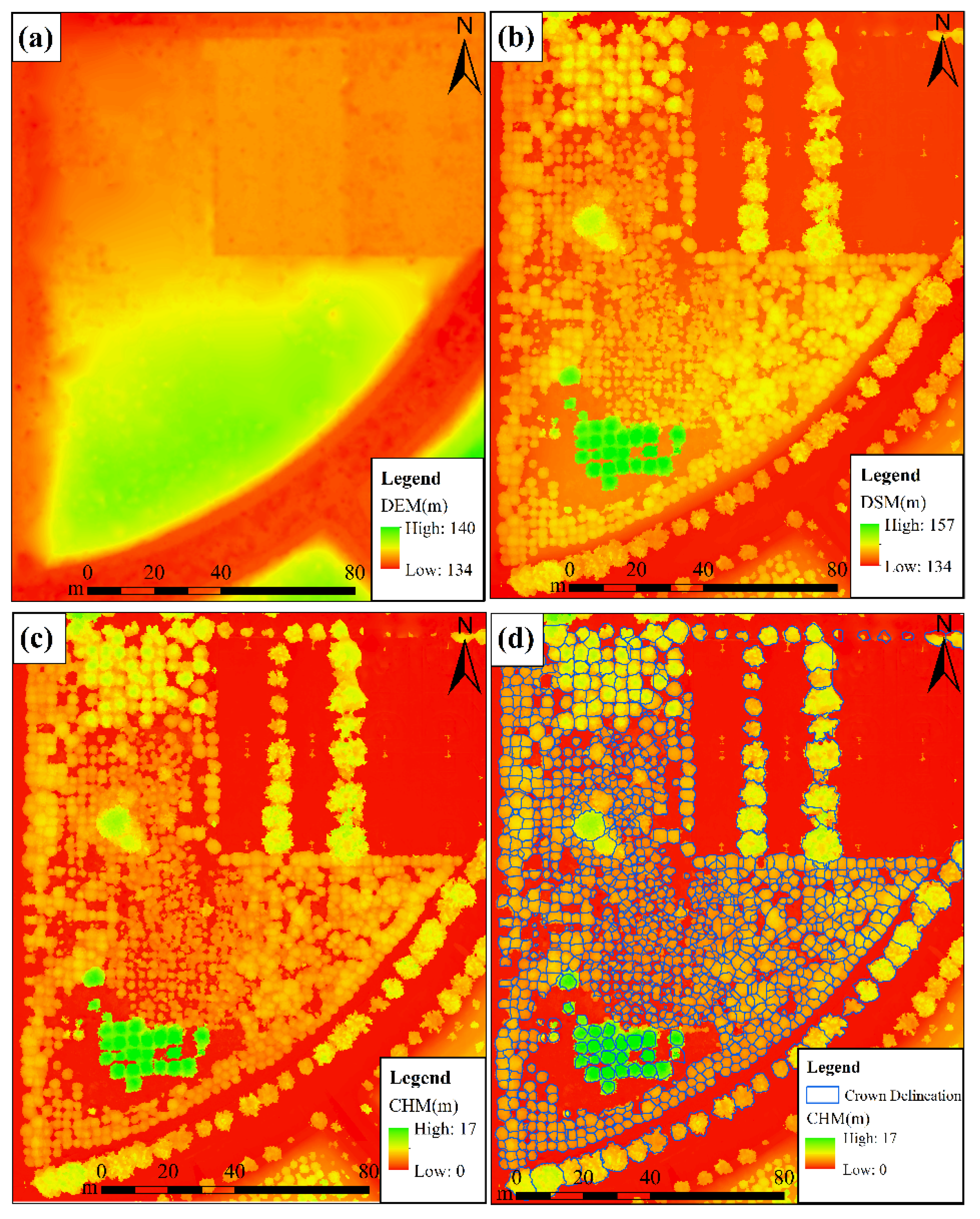
3.1. Results of DEM Generated from UAV LiDAR and Stereo Images
3.2. Results of Individual Tree Crown Delineation
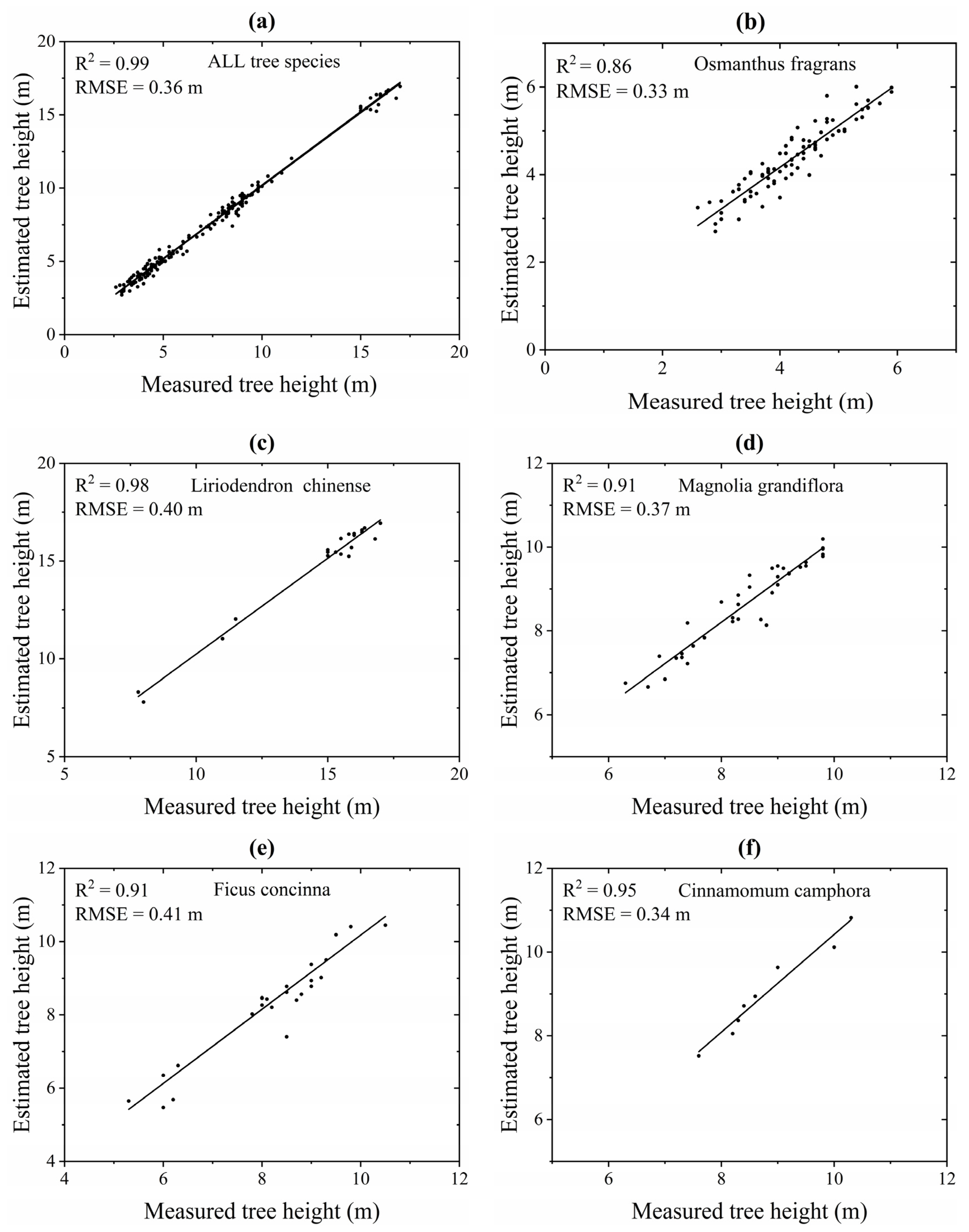
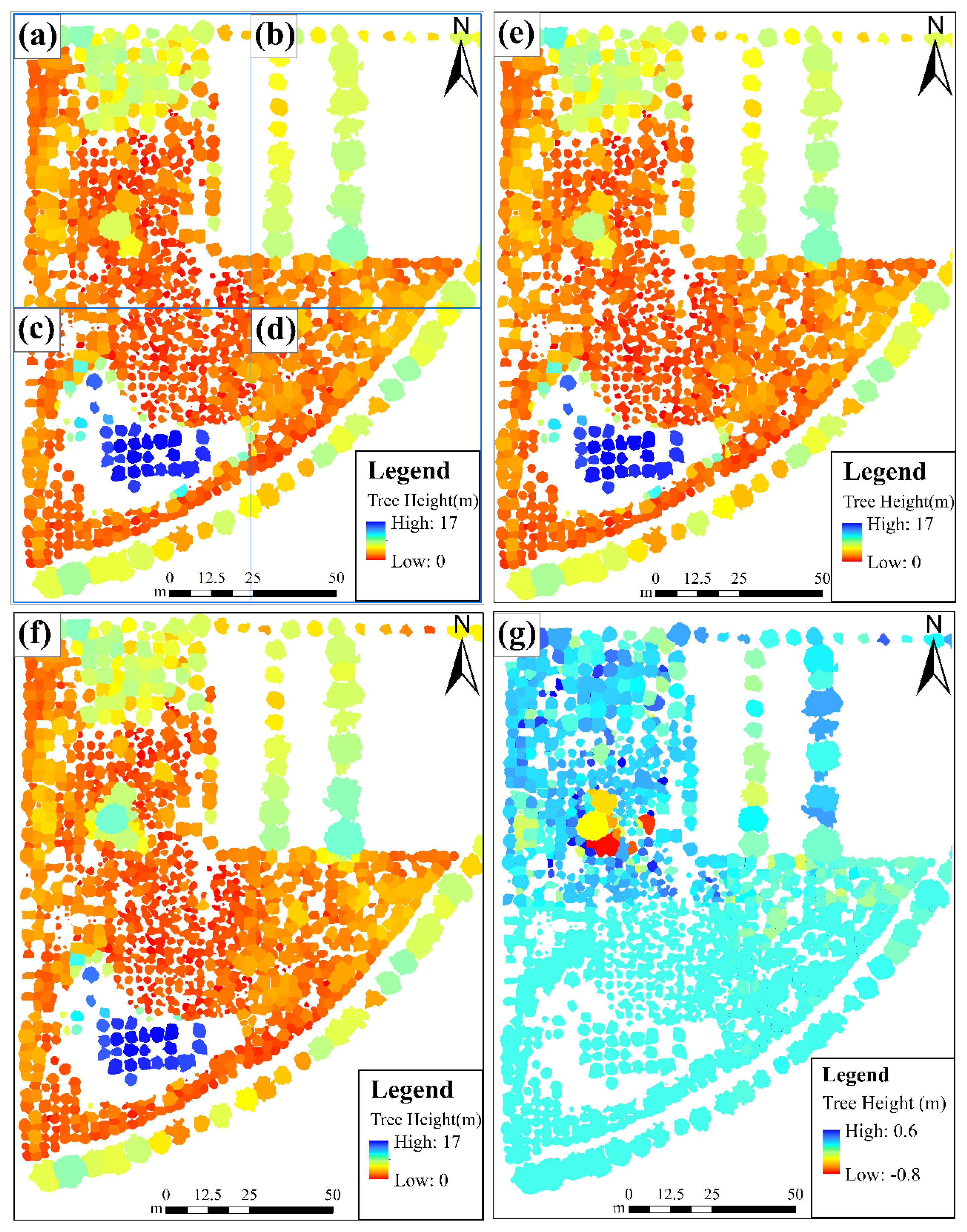
3.3. Extraction Results of Tree Height
3.4. Extraction Results of Monthly Tree Height Growth
3.5. Results of the Correction of Time Differences in Tree Height Changes
4. Discussion
4.1. Analysis of the Differences in DEMs Derived from UAV LiDAR and Stereo Imagery
4.2. Analysis of the Height Growth Rules of Different Tree Species
4.3. Time Difference Correction in Tree Height Estimation
5. Conclusions
- (1)
- In cases where the stand canopy density was low, more accurate DEMs could be obtained by employing UAV stereo images. The difference in accuracy between the DEM derived from UAV stereo images and the DEM derived from UAV LiDAR was small. However, the accuracy of the DEM derived from UAV LiDAR image data was still superior to the DEM generated by utilizing UAV stereo images in areas with a high canopy density. The DEM derived from UAV-RGB stereo images was closely related to the measured ground elevation data, with R2 = 0.97 and RMSE = 0.21 m. Meanwhile, the DEM derived from UAV RGB stereo images was closely related to the DEM derived from UAV LiDAR data, with R2 = 0.96 and RMSE = 0.26 m.
- (2)
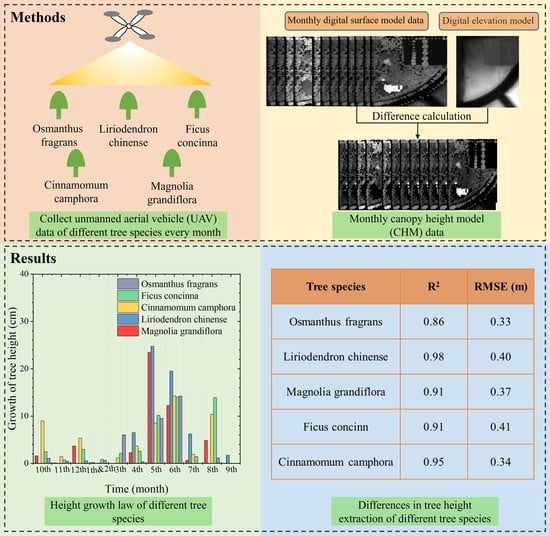
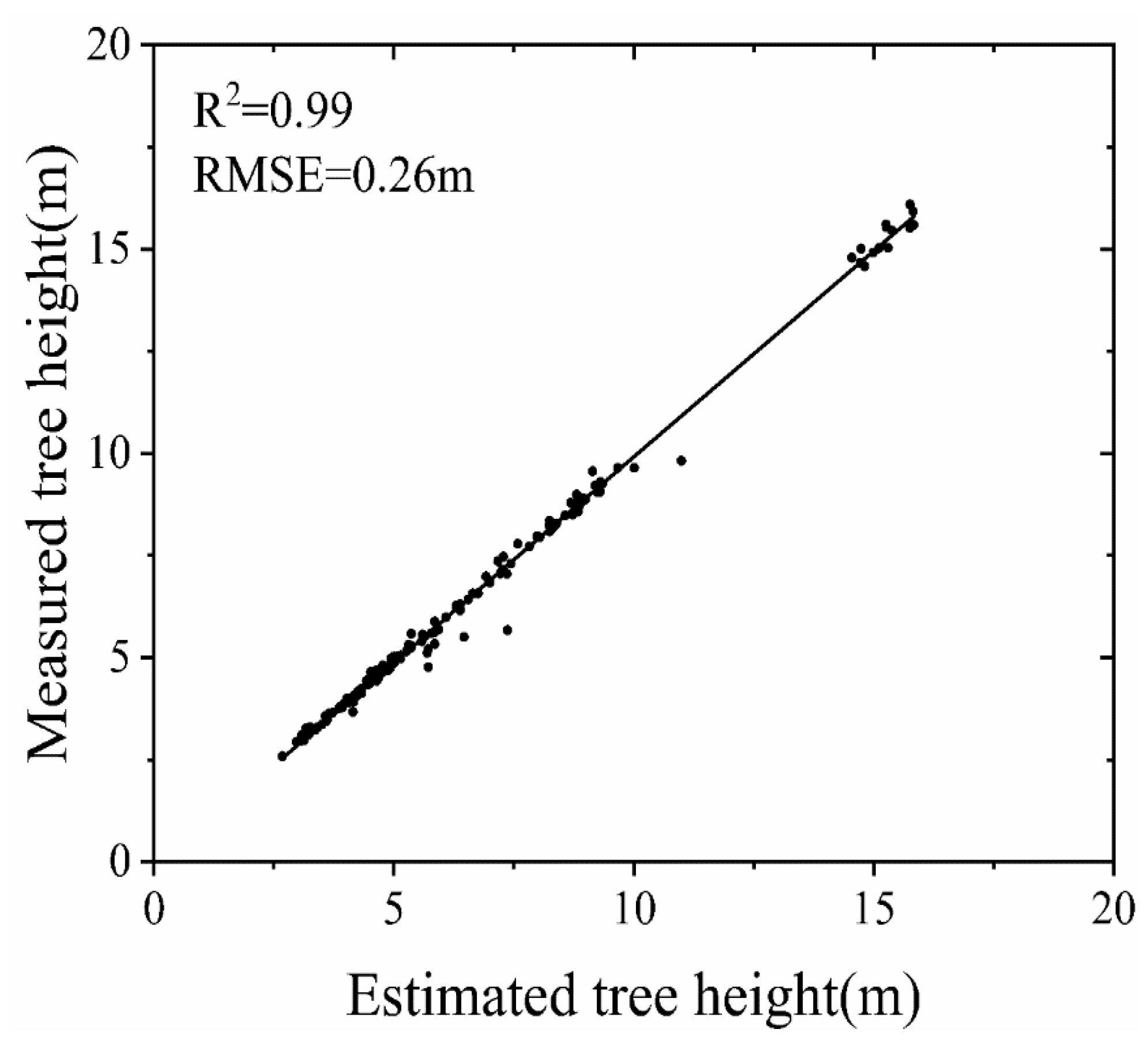
- The tree height can be accurately estimated by employing UAV stereo images, with R2 of 0.99 and an RMSE of 0.36 m. The estimation accuracy of the Cinnamomum camphora tree species was the highest, with R2 = 0.95 and RMSE = 0.34 m. The estimation accuracy of Ficus concinna tree species was relatively low, with R2 = 0.91 and RMSE = 0.47 m.
- (3)
- The monthly height growth changes can be derived from the monthly-scale UAV stereo images, with May and June exhibiting relatively significant changes in tree height growth. However, there were certain differences in the accuracy of the total annual growth estimates and the monthly growth changes of different tree species. When the tree species were not taken into account, the total growth of each month throughout the year was 46.53 cm. The most significant changes in the height growth of the trees occurred in May (14.26 cm) and June (14.67 cm), accounting for 63.17% of the annual growth. When the tree species were considered, the resulting total annual height growth estimates of the different tree species were different. The Liriodendron chinense tree species exhibited the most significant annual growth of 58.64 cm. In comparison, the Osmanthus fragrans species exhibited the lowest annual growth change of 34.00 cm. In the estimation of the height growth of trees in each month, the difference between different tree species was also obtained. For example, the growing season of the Liriodendron chinense tree species occurred primarily between April and July, and the growth of tree height was 56.92 cm (which accounted for about 97.08% of the annual growth of tree height). In the case of the Ficus concinna tree species, the tree was in a constant state of growth during each month throughout the year. The growth became faster between May and August (44.24 cm), which accounted for 77.09% of the annual growth.
- (4)
- The correction of time differences in the regional tree height estimates can be accomplished based on the extraction results of monthly tree height growth estimates. The tree height corrected for monthly growth time differences was closely related to the tree height extracted from UAV stereo images, with R2 of 0.99 and an RMSE of 0.26 m.
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Yu, X.; Hyyppä, J.; Kukko, A.; Maltamo, M.; Kaartinen, H. Change detection techniques for canopy height growth measurements using airborne laser scanner data. Photogramm. Eng. Remote Sens. 2006, 72, 1339–1348. [Google Scholar] [CrossRef]
- Lin, Y.; Hyyppä, J.; Kukko, A.; Jaakkola, A.; Kaartinen, H. Tree height growth measurement with single-scan airborne, static terrestrial and mobile laser scanning. Sensors 2012, 12, 12798–12813. [Google Scholar] [CrossRef] [Green Version]
- Puliti, S.; Gobakken, T.; Ørka, H.O.; Næsset, E. Assessing 3D point clouds from aerial photographs for species-specific forest inventories. Scand. J. For. Res. 2017, 32, 68–79. [Google Scholar] [CrossRef]
- Tanhuanpää, T.; Saarinen, N.; Kankare, V.; Nurminen, K.; Vastaranta, M.; Honkavaara, E.; Karjalainen, M.; Yu, X.; Holopainen, M.; Hyyppä, J. Evaluating the performance of high-altitude aerial image-based digital surface models in detecting individual tree crowns in mature boreal forests. Forests 2016, 7, 143. [Google Scholar] [CrossRef]
- Holopainen, M.; Vastaranta, M.; Karjalainen, M.; Karila, K.; Kaasalainen, S.; Honkavaara, E.; Hyyppä, J. Forest inventory attribute estimation using airborne laser scanning, aerial stereoimagery, radargrammetry and interferometry-Finnish experiences of the 3D techniques. ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2015, 2, 63–69. [Google Scholar]
- White, J.C.; Wulder, M.A.; Vastaranta, M.; Coops, N.C.; Pitt, D.; Woods, M. The utility of image-based point clouds for forest inventory: A comparison with airborne laser scanning. Forests 2013, 4, 518–536. [Google Scholar] [CrossRef] [Green Version]
- Duarte, A.; Acevedo-Muñoz, L.; Gonçalves, C.I.; Mota, L.; Sarmento, A.; Silva, M.; Fabres, S.; Borralho, N.; Valente, C. Detection of longhorned borer attack and assessment in eucalyptus plantations using UAV imagery. Remote Sens. 2020, 12, 3153. [Google Scholar] [CrossRef]
- Iglhaut, J.; Cabo, C.; Puliti, S.; Piermattei, L.; O’Connor, J.; Rosette, J. Structure from motion photogrammetry in forestry: A review. Curr. For. Rep. 2019, 5, 155–168. [Google Scholar] [CrossRef] [Green Version]
- Thiel, C.; Schmullius, C. Comparison of UAV photograph-based and airborne lidar-based point clouds over forest from a forestry application perspective. Int. J. Remote Sens. 2017, 38, 2411–2426. [Google Scholar] [CrossRef]
- Torresan, C.; Berton, A.; Carotenuto, F.; Di Gennaro, S.F.; Gioli, B.; Matese, A.; Miglietta, F.; Vagnoli, C.; Zaldei, A.; Wallace, L. Forestry applications of UAVs in Europe: A review. Int. J. Remote Sens. 2017, 38, 2427–2447. [Google Scholar] [CrossRef]
- Karpina, M.; Jarząbek-Rychard, M.; Tymków, P.; Borkowski, A. UAV-based automatic tree growth measurement for biomass estimation. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2016, 8, 685–688. [Google Scholar] [CrossRef]
- Guerra-Hernández, J.; González-Ferreiro, E.; Monleón, V.; Faias, S.; Tomé, M.; Díaz-Varela, R. Use of Multi-Temporal UAV-Derived Imagery for Estimating Individual Tree Growth in Pinus pinea Stands. Forests 2017, 8, 300. [Google Scholar] [CrossRef]
- Guerra-Hernández, J.; Cosenza, D.N.; Cardil, A.; Silva, C.A.; Botequim, B.; Soares, P.; Silva, M.; González-Ferreiro, E.; Díaz-Varela, R.A. Predicting growing stock volume of eucalyptus plantations using 3-D point clouds derived from UAV imagery and ALS data. Forests 2019, 10, 905. [Google Scholar] [CrossRef] [Green Version]
- Pádua, L.; Hruška, J.; Bessa, J.; Adão, T.; Martins, L.M.; Gonçalves, J.A.; Peres, E.; Sousa, A.M.; Castro, J.P.; Sousa, J.J. Multi-temporal analysis of forestry and coastal environments using UASs. Remote Sens. 2017, 10, 24. [Google Scholar] [CrossRef] [Green Version]
- Dempewolf, J.; Nagol, J.; Hein, S.; Thiel, C.; Zimmermann, R. Measurement of Within-Season Tree Height Growth in a Mixed Forest Stand Using UAV Imagery. Forests 2017, 8, 231. [Google Scholar] [CrossRef] [Green Version]
- Zhao, X.; Guo, Q.; Su, Y.; Xue, B. Improved progressive TIN densification filtering algorithm for airborne LiDAR data in forested areas. ISPRS J. Photogramm. Remote Sens. 2016, 117, 79–91. [Google Scholar] [CrossRef] [Green Version]
- Chen, Q.; Baldocchi, D.; Gong, P.; Kelly, M. Isolating Individual Trees in a Savanna Woodland using Small Footprint LIDAR data. Photogramm. Eng. Remote Sens. 2006, 72, 923–932. [Google Scholar] [CrossRef] [Green Version]
- Panagiotidis, D.; Abdollahnejad, A.; Surový, P.; Chiteculo, V. Determining tree height and crown diameter from high-resolution UAV imagery. Int. J. Remote Sens. 2017, 38, 2392–2410. [Google Scholar] [CrossRef]
- Miraki, M.; Sohrabi, H.; Fatehi, P.; Kneubuehler, M. Individual tree crown delineation from high-resolution UAV images in broadleaf forest. Ecol. Inform. 2021, 61, 101207. [Google Scholar] [CrossRef]
- Nuijten, R.J.; Coops, N.C.; Goodbody, T.R.; Pelletier, G. Examining the multi-seasonal consistency of individual tree segmentation on deciduous stands using digital aerial photogrammetry (DAP) and unmanned aerial systems (UAS). Remote Sens. 2019, 11, 739. [Google Scholar] [CrossRef] [Green Version]
- Goldbergs, G.; Maier, S.W.; Levick, S.R.; Edwards, A. Efficiency of individual tree detection approaches based on light-weight and low-cost UAS imagery in Australian Savannas. Remote Sens. 2018, 10, 161. [Google Scholar] [CrossRef]
- Yin, D.; Wang, L. How to assess the accuracy of the individual tree-based forest inventory derived from remotely sensed data: A review. Int. J. Remote Sens. 2016, 37, 4521–4553. [Google Scholar] [CrossRef]
- Tilly, N.; Kelterbaum, D.; Zeese, R. Geomorphological Mapping with Terrestrial Laser Scanning and Uav-Based Imaging. ISPRS Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2016, 41, 591–597. [Google Scholar] [CrossRef] [Green Version]
- Elsner, P.; Dornbusch, U.; Thomas, I.; Amos, D.; Bovington, J.; Horn, D. Coincident beach surveys using UAS, vehicle mounted and airborne laser scanner: Point cloud inter-comparison and effects of surface type heterogeneity on elevation accuracies. Remote Sens. Environ. 2018, 208, 15–26. [Google Scholar] [CrossRef]
- Ouédraogo, M.M.; Degré, A.; Debouche, C.; Lisein, J. The evaluation of unmanned aerial system-based photogrammetry and terrestrial laser scanning to generate DEMs of agricultural watersheds. Geomorphology 2014, 214, 339–355. [Google Scholar] [CrossRef]
- Wilkinson, M.; Jones, R.; Woods, C.; Gilment, S.; McCaffrey, K.; Kokkalas, S.; Long, J. A comparison of terrestrial laser scanning and structure-from-motion photogrammetry as methods for digital outcrop acquisition. Geosphere 2016, 12, 1865–1880. [Google Scholar] [CrossRef] [Green Version]
- Nikolakopoulos, K.G.; Antonakakis, A.; Kyriou, A.; Koukouvelas, I.; Stefanopoulos, P. Comparison of terrestrial laser scanning and structure-from-motion photogrammetry for steep slope mapping. In Proceedings of the Earth Resources and Environmental Remote Sensing/GIS Applications IX, Berlin, Germany, 9 October 2018; pp. 95–105. [Google Scholar]
- Jonathan, L.; Marc, P.D.; Stéphanie, B.; Philippe, L. A Photogrammetric Workflow for the Creation of a Forest Canopy Height Model from Small Unmanned Aerial System Imagery. Forests 2013, 4, 922–944. [Google Scholar]
- Zarco-Tejada, P.J.; Diaz-Varela, R.; Angileri, V.; Loudjani, P. Tree height quantification using very high resolution imagery acquired from an unmanned aerial vehicle (UAV) and automatic 3D photo-reconstruction methods. Eur. J. Agron. 2014, 55, 89–99. [Google Scholar] [CrossRef]
- Hernández-Clemente, R.; Navarro-Cerrillo, R.M.; Romero Ramírez, F.J.; Hornero, A.; Zarco-Tejada, P.J. A Novel Methodology to Estimate Single-Tree Biophysical Parameters from 3D Digital Imagery Compared to Aerial Laser Scanner Data. Remote Sens. 2014, 6, 11627–11648. [Google Scholar] [CrossRef] [Green Version]
- Ma, L.; Liu, Y.; Zhu, W.; Heng, B.; Lin, X. Performance of Hybrid Chinese Tulip Tree in HanZhong prefecture. Shaanxi For. Sci. Technol. 2022, 50, 87–89. (In Chinese) [Google Scholar]
- Liu, Y.; Yang, Q.; Zhou, L.; Zhu, Y. The growth law of Magnolia magnolia. Pract. For. Technol. 2012, 54–55. (In Chinese) [Google Scholar] [CrossRef]
- St-Onge, B.; Vepakomma, U. Assessing forest gap dynamics and growth using multi-temporal laser-scanner data. Power 2004, 140, 173–178. [Google Scholar]
- Yu, X.; Hyyppä, J.; Kaartinen, H.; Maltamo, M. Automatic detection of harvested trees and determination of forest growth using airborne laser scanning. Remote Sens. Environ. 2004, 90, 451–462. [Google Scholar] [CrossRef]
- Véga, C.; St-Onge, B. Height growth reconstruction of a boreal forest canopy over a period of 58 years using a combination of photogrammetric and lidar models. Remote Sens. Environ. 2008, 112, 1784–1794. [Google Scholar] [CrossRef]
- Tian, J.; Schneider, T.; Straub, C.; Kugler, F.; Reinartz, P. Exploring digital surface models from nine different sensors for forest monitoring and change detection. Remote Sens. 2017, 9, 287. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Tree Species | Quantity (Trees) | Maximum Tree Height (m) | Minimum Tree Height (m) | Average Tree Height (m) |
|---|---|---|---|---|
| Osmanthus fragrans | 85 | 5.9 | 2.6 | 4.2 |
| Liriodendron chinense | 21 | 17.0 | 7.8 | 14.7 |
| Ficus concinna | 24 | 10.5 | 5.3 | 8.1 |
| Cinnamomum camphora | 8 | 10.3 | 7.6 | 8.8 |
| Magnolia grandiflora | 37 | 9.8 | 6.3 | 8.4 |
| DJI Phantom 4 RTK | DJI Matrice 300 RTK | ||
|---|---|---|---|
| Flight Patterns Sensor type | Flying in five directions RGB | Flight Patterns Sensor type | Aerial Photography LiDAR |
| RTK Service Type | Network RTK | RTK Service Type | Network RTK |
| Coordinate system | WGS84 | Coordinate system | WGS84 |
| Flight altitude | 60 m | Flight altitude | 80 m |
| Flight speed | 7.9 m/s | Flight speed | 10 m/s |
| Side overlaps | 70% | Side overlaps | 70% |
| Forward overlaps | 80% | Return wave mode | Double echo |
| Photo scale | 3:2 | Sample frequency | 240 KHZ |
| White Balance | Sunny | Scan Mode | Repeat scan |
| Time (Year/Month) | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 | 12 |
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 2020 | ||||||||||||
| 2021 | ||||||||||||
| 2022 |
| Time (Year) | Month | Tree Height Growth (cm) |
|---|---|---|
| 2021 | October | 1.06 |
| November | 0.16 | |
| December | 2.27 | |
| 2022 | January and February | 0.17 |
| March | 3.69 | |
| April | 3.91 | |
| May | 14.26 | |
| June | 14.67 | |
| July | 1.82 | |
| August | 4.34 | |
| September | 0.18 | |
| Sum of tree height growth in each month from October 2021 to October 2022 | - | 46.53 |
| Sum of tree height growth calculated based on two imagery periods in October 2021 and October 2022 | - | 45.37 |
| Time/Tree Species | Liriodendron chinense (cm) | Magnolia grandiflora (cm) | Ficus concinna (cm) | Osmanthus fragrans (cm) | Cinnamomum camphora (cm) |
|---|---|---|---|---|---|
| October | 0.00 | 1.58 | 2.49 | 1.08 | 8.99 |
| November | 0.00 | 0.11 | 0.72 | 0.45 | 1.45 |
| December | 0.00 | 3.68 | 2.98 | 0.54 | 5.37 |
| January and February | 0.00 | 0.19 | 0.85 | 0.64 | 0.07 |
| March | 0.00 | 0.00 | 2.13 | 6.03 | 1.18 |
| April | 6.50 | 2.25 | 2.57 | 0.35 | 3.70 |
| May | 24.75 | 23.45 | 10.16 | 9.51 | 8.51 |
| June | 19.48 | 12.24 | 14.01 | 14.24 | 14.27 |
| July | 6.20 | 0.66 | 1.47 | 0.00 | 1.95 |
| August | 0.00 | 4.85 | 13.90 | 1.15 | 10.36 |
| September | 1.72 | 0.00 | 0.03 | 0.01 | 0.00 |
| Sum of monthly average growth | 58.64 | 49.02 | 51.29 | 34.00 | 55.86 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tang, X.; You, H.; Liu, Y.; You, Q.; Chen, J. Monitoring of Monthly Height Growth of Individual Trees in a Subtropical Mixed Plantation Using UAV Data. Remote Sens. 2023, 15, 326. https://doi.org/10.3390/rs15020326
Tang X, You H, Liu Y, You Q, Chen J. Monitoring of Monthly Height Growth of Individual Trees in a Subtropical Mixed Plantation Using UAV Data. Remote Sensing. 2023; 15(2):326. https://doi.org/10.3390/rs15020326
Chicago/Turabian StyleTang, Xu, Haotian You, Yao Liu, Qixu You, and Jianjun Chen. 2023. "Monitoring of Monthly Height Growth of Individual Trees in a Subtropical Mixed Plantation Using UAV Data" Remote Sensing 15, no. 2: 326. https://doi.org/10.3390/rs15020326
APA StyleTang, X., You, H., Liu, Y., You, Q., & Chen, J. (2023). Monitoring of Monthly Height Growth of Individual Trees in a Subtropical Mixed Plantation Using UAV Data. Remote Sensing, 15(2), 326. https://doi.org/10.3390/rs15020326