
On-Orbit Relative Radiometric Calibration of the Bayer Pattern Push-Broom Sensor for Zhuhai-1 Video Satellites



Abstract
:1. Introduction
1.1. OVS Satellites Overview
1.2. Relative Radiometric Calibration
2. Methods
2.1. Bayer Pattern Conversion
2.2. Bayer Pattern Position Determination
- 1.
- Calculate the linecounter value of the ith row of Bayer pattern data.
- 2.
- Determine the first position of a complete Bayer pattern. If is odd, the following equation holds:where the ith row data is the starting line of the Bayer pattern. If this is true, then the order can proceed to step (3), otherwise the calculation must be performed before returning to step (1).
- 3.
- Determine whether the ith row Bayer pattern data is continuous with the adjacent imaging data and Bayer pattern according to the following rules:If the ith iteration meets the above formula, the ith row is the starting row of the complete Bayer pattern data. Otherwise, the ith data will be discarded and the calculation must be performed before returning to step (1).
- 4.
- Repeat steps 1–3 to determine the locations of all complete Bayer pattern data.
2.3. Relative Calibration Parameter Solving
- 5.
- Calculate the DN number of the imaging data acquired by the ith detector, as in the following equations:where , n is sensor quantization bits, is the number of DNs whose value of the ith detector of the virtual linear sensor is equal to k. is the total number of DNs acquired by the ith detector of the virtual linear array.
- 6.
- Establish the cumulative probability distribution function, , of each sensor detector according to Equation (7).
- 7.
- 8.
- Set the cumulative probability distribution function of the imaging gray data of all the sensor detectors as the reference cumulative probability distribution function for each band, ,, and :where is the total number of the virtual linear array sensor detectors.
- 9.
- Obtain the imaging response model of each sensor detector by mapping the cumulative probability distribution function of each sensor detector to the reference cumulative probability distribution function based on Equations (11) and (12):where k is the current calibration gray-level, the range of values of x and y is , and n is the satellite sensor image quantization bit.
2.4. Quality Assessment
3. Results
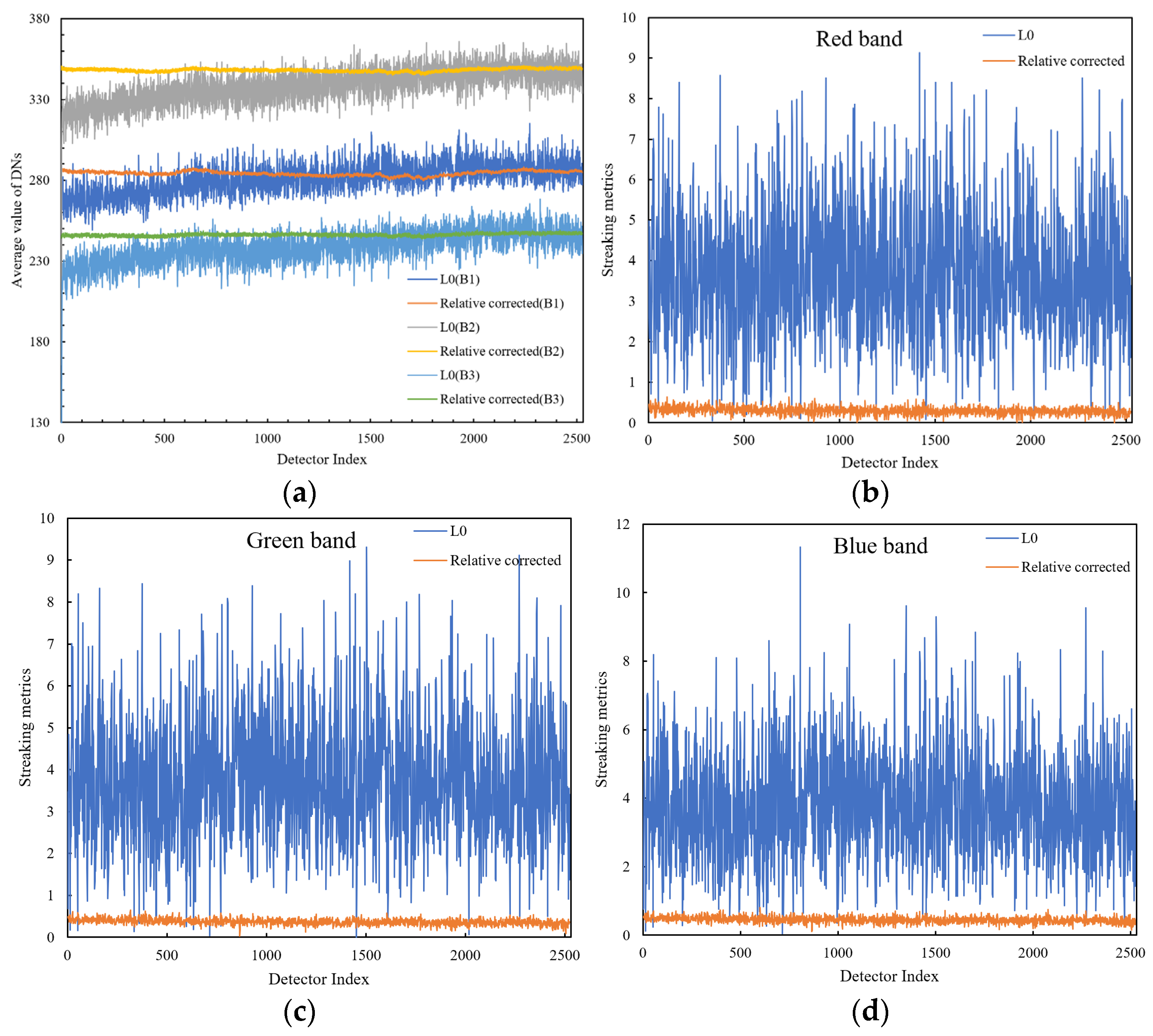
3.1. Calibration Results
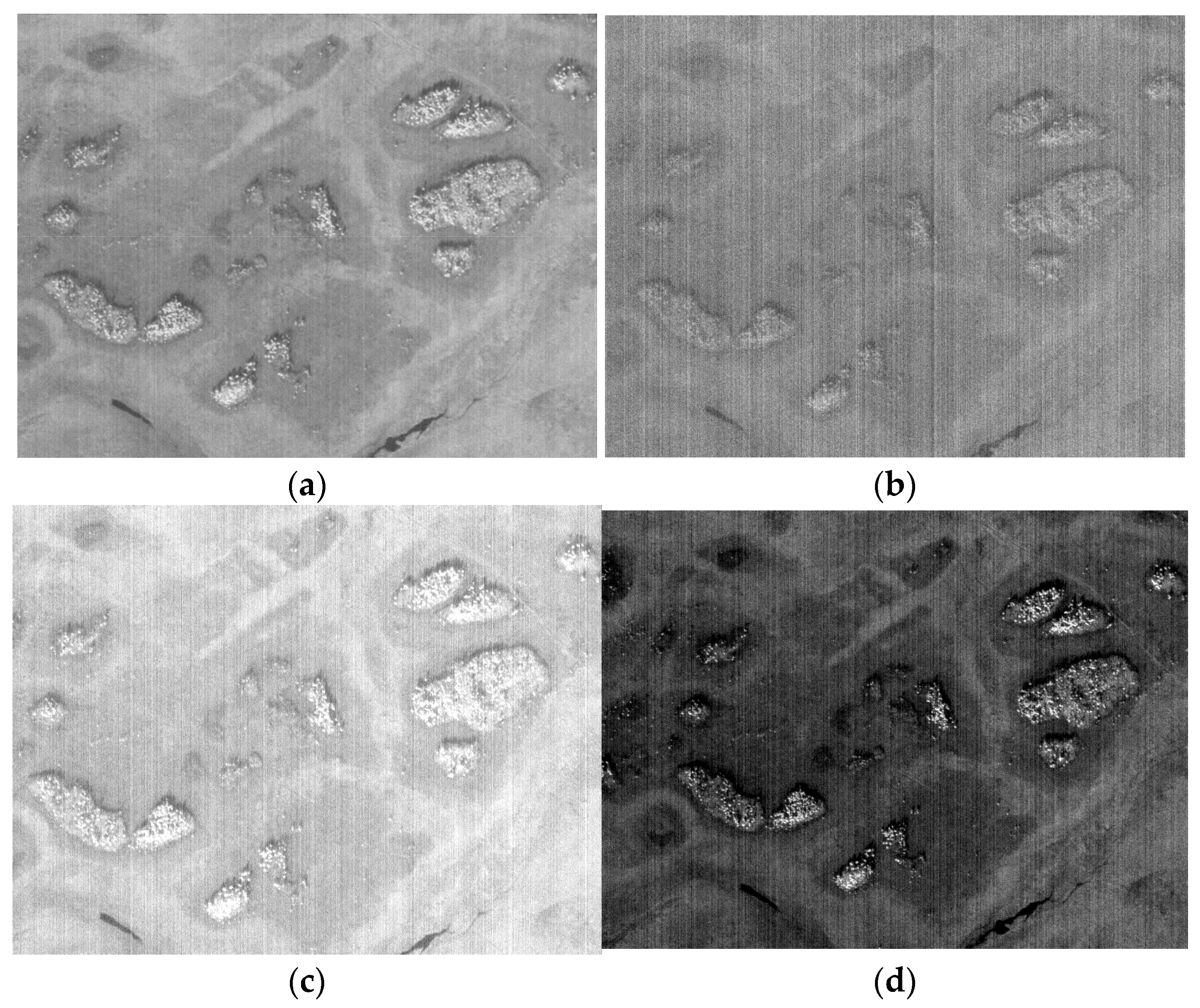
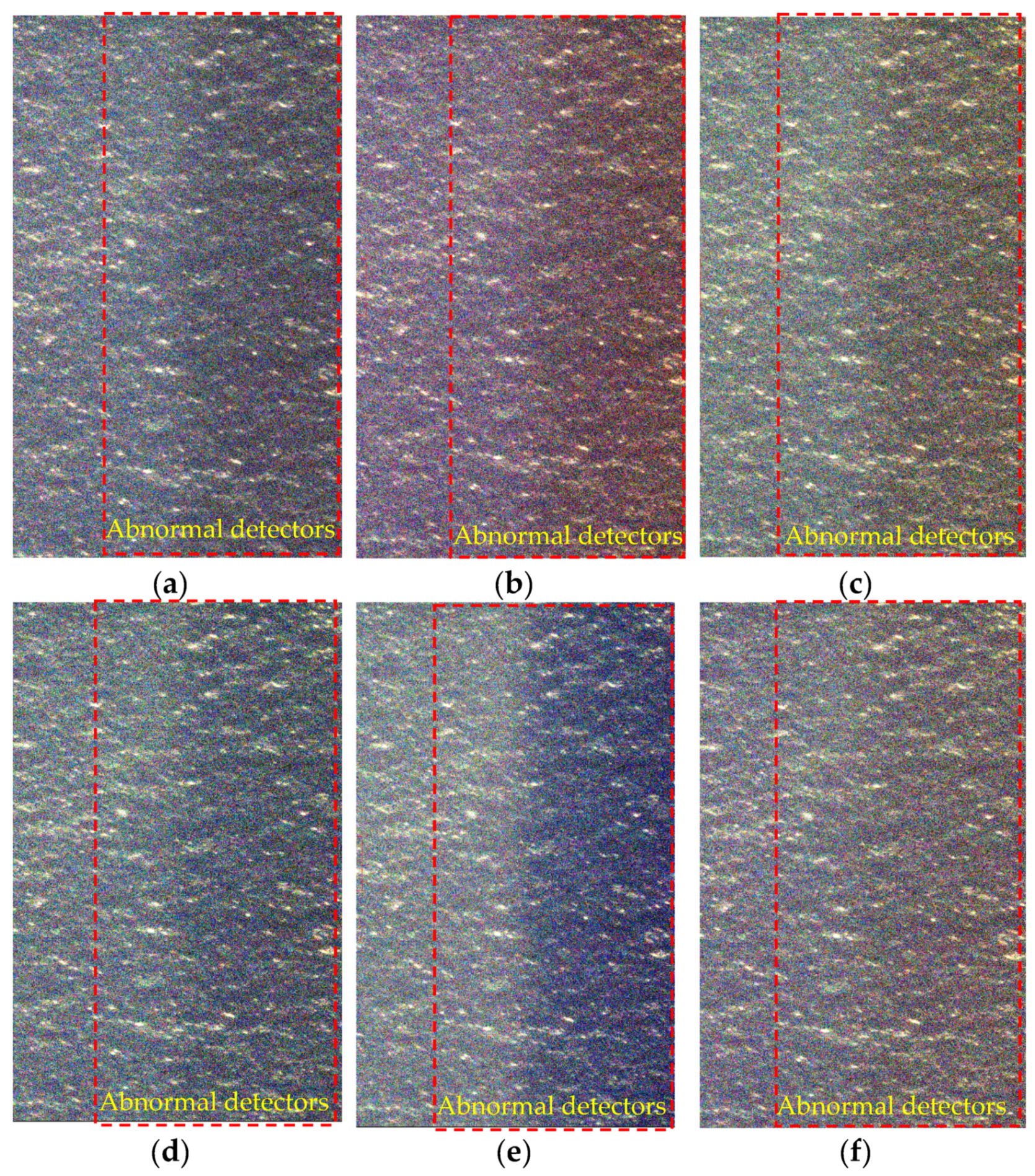
3.2. Visual Assessments
3.3. Accuracy Assessments
4. Discussion
5. Conclusions
- (1)
- reconstructing the order of each detector of the Bayer pattern sensor and converting it into a virtual linear array sensor to separate the RGB three-band components from the Bayer pattern; and
- (2)
- designing a positioning method linked by “linecounters” to detect the specific position of each detector of each Bayer pattern.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Li, L.; Jiang, L.; Zhang, J.; Wang, S.; Chen, F. A complete YOLO-based ship detection method for thermal infrared remote sensing images under complex backgrounds. Remote Sens. 2022, 14, 1534. [Google Scholar] [CrossRef]
- Teillet, P.M. Image correction for radiometric effects in remote sensing. Int. J. Remote Sens. 1986, 7, 1637–1651. [Google Scholar] [CrossRef]
- Moghimi, A.; Celik, T.; Mohammadzadeh, A. Tensor-based keypoint detection and switching regression model for relative radiometric normalization of bitemporal multispectral images. Int. J. Remote Sens. 2022, 43, 3927–3956. [Google Scholar] [CrossRef]
- Blanchet, G.; Lebegue, L.; Fourest, S.; Latry, C.; Porez-Nadal, F.; Lacherade, S.; Thiebaut, C. Pleiades-HR innovative techniques for radiometric image quality commissioning. In Proceedings of the ISPRS—International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences, Melbourne, Australia, 25 August–1 September 2012; Volume XXXIX-B1; pp. 513–518. [Google Scholar]
- Pesta, F.; Bhatta, S.; Helder, D.; Mishra, N. Radiometric non-uniformity characterization and correction of Landsat 8 OLI using earth imagery-based techniques. Remote Sens. 2014, 7, 430–446. [Google Scholar] [CrossRef] [Green Version]
- Kabir, S.; Leigh, L.; Helder, D. Vicarious methodologies to assess and improve the quality of the optical remote sensing images: A critical review. Remote Sens. 2020, 12, 4029. [Google Scholar] [CrossRef]
- Murthy, K.; Shearn, M.; Smiley, B.D.; Chau, A.H.; Levine, J.; Robinson, M.D. SkySat-1: Very high-resolution imagery from a small satellite. In Proceedings of the Sensors, Systems, and Next-Generation Satellites XVIII, Amsterdam, The Netherlands, 22–25 September 2014; Volume 9241, pp. 92411E-1–92411E-12. [Google Scholar]
- Zhang, G.; Li, L.; Jiang, Y.; Shen, X.; Li, D. On-orbit relative radiometric calibration of the night-time sensor of the LuoJia1-01 satellite. Sensors 2018, 18, 4225. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Zhang, G.; Li, L.T.; Jiang, Y.H.; Shi, X.T. On-orbit relative radiometric calibration of optical video satellites without uniform calibration sites. Int. J. Remote Sens. 2019, 40, 5454–5474. [Google Scholar] [CrossRef]
- Pascal, V.; Lebegue, L.; Meygret, A.; Laubies, M.; Hourcastagnou, J.; Hillairet, E. SPOT5 first in-flight radiometric image quality results. In Proceedings of the Sensors, Systems, and Next-Generation Satellites VI, Crete, Greece, 23–27 September 2002; Volume 4881, pp. 200–211. [Google Scholar]
- Pagnutti, M.; Ryan, R.E.; Kelly, M.; Holekamp, K.; Zanoni, V.; Thome, K.; Schiller, S. Radiometric characterization of IKONOS multispectral imagery. Remote Sens. Environ. 2003, 88, 53–68. [Google Scholar] [CrossRef] [Green Version]
- Anderson, C.; Helder, D.L.; Jeno, D. Statistical relative gain calculation for Landsat 8. In Proceedings of the Conference on Earth Observing Systems XXII, San Diego, CA, USA, August 10 June 2017. [Google Scholar]
- WEGENER, M. Destriping multiple sensor imagery by improved histogram matching. Int. J. Remote Sens. 1990, 11, 859–879. [Google Scholar] [CrossRef]
- Henderson, B.G.; Krauseb, K.S. Relative radiometric correction of QuickBird imagery using the side-slither technique on orbit. In Proceedings of the Earth Observing Systems IX, Denver, CO, USA, 4–6 August 2004; SPIE: Paris, France; Volume 5542, pp. 426–436. [Google Scholar] [CrossRef]
- Gerace, A.; Schott, J.; Gartley, M.; Montanaro, M. An analysis of the side slither on-orbit calibration technique using the DIRSIG model. Remote Sens. 2014, 6, 10523–10545. [Google Scholar] [CrossRef] [Green Version]
- Begeman, C.; Helder, D.; Leigh, L.; Pinkert, C. Relative radiometric correction of pushbroom satellites using the yaw maneuver. Remote Sens. 2022, 14, 2820. [Google Scholar] [CrossRef]
- Zhang, G.; Li, L. A study on relative radiometric calibration without calibration field for YG-25. Acta Geod. Cartogr. Sin. 2017, 46, 1009–1016. [Google Scholar]
- Li, L.; Zhang, G.; Jiang, Y.; Shen, X. An Improved On-Orbit Relative Radiometric Calibration Method for Agile High-Resolution Optical Remote-Sensing Satellites with Sensor Geometric Distortion. IEEE Trans. Geosci. Remote Sens. 2022, 60, 1–15. [Google Scholar] [CrossRef]
- Angal, A.; Helder, D. Advanced Land Imager Relative Gain characterization and Correction. In Proceedings of the Pecora 16—Global Priorities in Land Remote Sensing 2005, Sioux Falls, SD, USA, 23–27 October 2005. [Google Scholar]
- Chung, K.H.; Chan, Y.H. An edge-directed demosaicing algorithm based on integrated gradient. In Proceedings of the 2010 IEEE International Conference on Multimedia and Expo, Singapore, 19–23 July 2010; pp. 388–393. [Google Scholar]
- Pekkucuksen, I.; Altunbasak, Y. Multiscale gradients-based color filter array interpolation. IEEE Trans. Image Process. 2013, 22, 157–165. [Google Scholar] [CrossRef] [PubMed]
- Shrestha, A.K.; Helder, D. Relative gain characterization and correction for pushbroom sensors based on lifetime image statistics. In Proceedings of the Civil Commercial Imagery Evaluation Workshop 2010, Fairfax, VA, USA, 16–18 March 2010. [Google Scholar]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Ground swath | 22.5 km @ 500 km |
| Imaging mode | Staring video mode: frame rate: 10–25 fps Push-broom mode |
| Resolution | 0.9 m |
| Quantization bits | Video mode: 8 bits Push-broom mode: 10 bits |
| Color | Bayer pattern |
| Modulation Transfer Function | ≥0.12 @ Nyquist frequency |
| Signal To Noise Ratio | ≥35 dB (Sun elevation angle ≥ 50°) |
| CMOS | Zone | Band | Average DNs | Streaking Metrics (%) | RMS (%) |
|---|---|---|---|---|---|
| 1 | 1 | R | 174.464505 | 0.252942 | 0.553052 |
| G | 303.027251 | 0.128574 | 0.389035 | ||
| B | 299.120944 | 0.101004 | 0.286782 | ||
| 2 | R | 145.834542 | 0.602074 | 0.689595 | |
| G | 278.809108 | 0.434780 | 0.380873 | ||
| B | 280.663032 | 0.358834 | 0.377148 | ||
| 3 | R | 187.183937 | 0.834730 | 0.602284 | |
| G | 330.415927 | 0.708178 | 0.472996 | ||
| B | 322.815496 | 0.643862 | 0.382063 | ||
| 4 | R | 633.844315 | 0.505590 | 1.452498 | |
| G | 885.569805 | 0.469941 | 1.384834 | ||
| B | 689.440504 | 0.438069 | 0.987072 | ||
| 2 | 1 | R | 213.339061 | 0.391711 | 0.654857 |
| G | 331.792004 | 0.289577 | 0.598556 | ||
| B | 313.929878 | 0.224774 | 0.529018 | ||
| 2 | R | 183.932816 | 0.818849 | 1.050736 | |
| G | 306.118564 | 0.706289 | 0.998101 | ||
| B | 298.570655 | 0.656120 | 0.635410 | ||
| 3 | R | 210.372869 | 0.212614 | 0.598503 | |
| G | 334.387692 | 0.315220 | 0.538775 | ||
| B | 318.118987 | 0.379993 | 0.545816 | ||
| 4 | R | 677.060288 | 0.188683 | 0.637184 | |
| G | 918.258576 | 0.158117 | 1.107705 | ||
| B | 706.071616 | 0.130670 | 0.643381 | ||
| 3 | 1 | R | 167.416066 | 0.234464 | 0.402989 |
| G | 301.497830 | 0.108619 | 0.220347 | ||
| B | 301.903464 | 0.093085 | 0.289550 | ||
| 2 | R | 126.881600 | 0.549097 | 0.769455 | |
| G | 254.414065 | 0.357859 | 0.607761 | ||
| B | 272.225351 | 0.286836 | 0.363299 | ||
| 3 | R | 623.796314 | 0.814639 | 1.237399 | |
| G | 882.974602 | 0.780348 | 1.039002 | ||
| B | 694.270148 | 0.748270 | 0.548426 | ||
| 4 | 1 | R | 210.705489 | 0.437302 | 0.733809 |
| G | 327.850046 | 0.337556 | 0.424513 | ||
| B | 301.488013 | 0.273422 | 0.451469 | ||
| 2 | R | 169.106208 | 0.420492 | 0.866250 | |
| G | 282.933319 | 0.297154 | 0.726361 | ||
| B | 273.462593 | 0.230403 | 0.564223 | ||
| 3 | R | 194.781064 | 0.151181 | 0.828773 | |
| G | 314.900084 | 0.073915 | 0.573989 | ||
| B | 296.537163 | 0.091034 | 0.663551 | ||
| 4 | R | 678.343272 | 0.188817 | 0.616931 | |
| G | 919.031208 | 0.159909 | 0.740941 | ||
| B | 681.249269 | 0.131942 | 0.742365 | ||
| 5 | 1 | R | 234.104145 | 0.098038 | 0.885455 |
| G | 386.938663 | 0.043580 | 0.674836 | ||
| B | 381.137859 | 0.080850 | 0.595346 | ||
| 2 | R | 179.405221 | 0.160321 | 0.135142 | |
| G | 319.111673 | 0.037737 | 0.185095 | ||
| B | 333.812995 | 0.036985 | 0.176527 | ||
| 3 | R | 212.526180 | 0.542912 | 0.638558 | |
| G | 364.433856 | 0.434148 | 0.476657 | ||
| B | 372.303330 | 0.381670 | 0.367203 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, L.; Li, Z.; Wang, Z.; Jiang, Y.; Shen, X.; Wu, J. On-Orbit Relative Radiometric Calibration of the Bayer Pattern Push-Broom Sensor for Zhuhai-1 Video Satellites. Remote Sens. 2023, 15, 377. https://doi.org/10.3390/rs15020377
Li L, Li Z, Wang Z, Jiang Y, Shen X, Wu J. On-Orbit Relative Radiometric Calibration of the Bayer Pattern Push-Broom Sensor for Zhuhai-1 Video Satellites. Remote Sensing. 2023; 15(2):377. https://doi.org/10.3390/rs15020377
Chicago/Turabian StyleLi, Litao, Zhen Li, Zhixin Wang, Yonghua Jiang, Xin Shen, and Jiaqi Wu. 2023. "On-Orbit Relative Radiometric Calibration of the Bayer Pattern Push-Broom Sensor for Zhuhai-1 Video Satellites" Remote Sensing 15, no. 2: 377. https://doi.org/10.3390/rs15020377
APA StyleLi, L., Li, Z., Wang, Z., Jiang, Y., Shen, X., & Wu, J. (2023). On-Orbit Relative Radiometric Calibration of the Bayer Pattern Push-Broom Sensor for Zhuhai-1 Video Satellites. Remote Sensing, 15(2), 377. https://doi.org/10.3390/rs15020377