
Vision-Based Moving-Target Geolocation Using Dual Unmanned Aerial Vehicles


Abstract
:1. Introduction
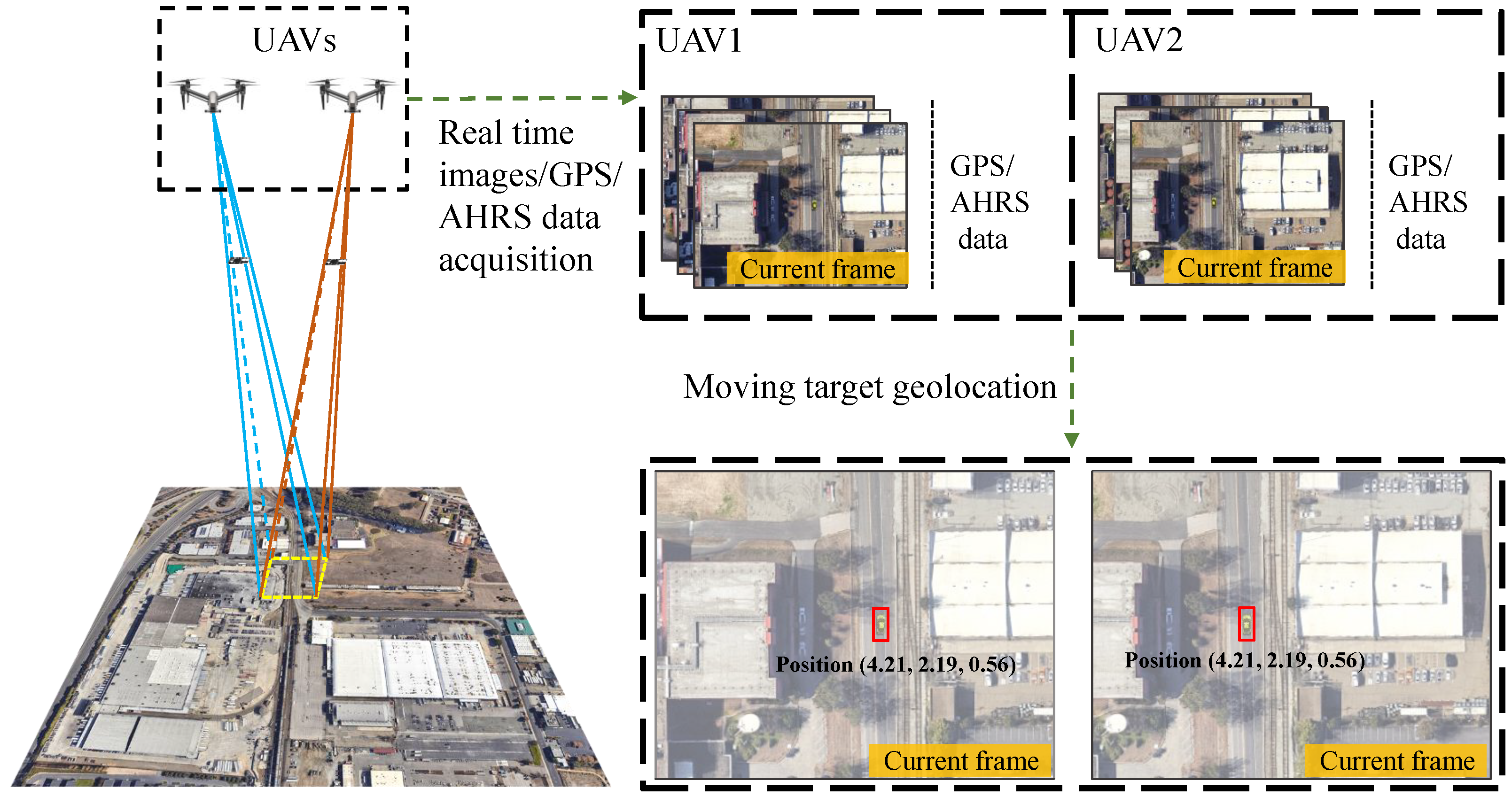
- We propose a ground moving-target geolocation framework that utilizes only the sequence of images obtained by two UAVs with low-quality sensors. The framework contains the processes of corresponding point matching, target altitude estimation, and parameter regression, which are used to mitigate the negative influences of Gaussian measurement errors and yaw-angle biases.
- In order to obtained more available images using only two UAVs, we propose a corresponding-point-matching method based on epipolar constraint. The method enables the historical images to be used to estimate the current position of the moving target. In addition, in order to filter out the wrong corresponding points, we propose an outer point filtering method based on the consistency principle.
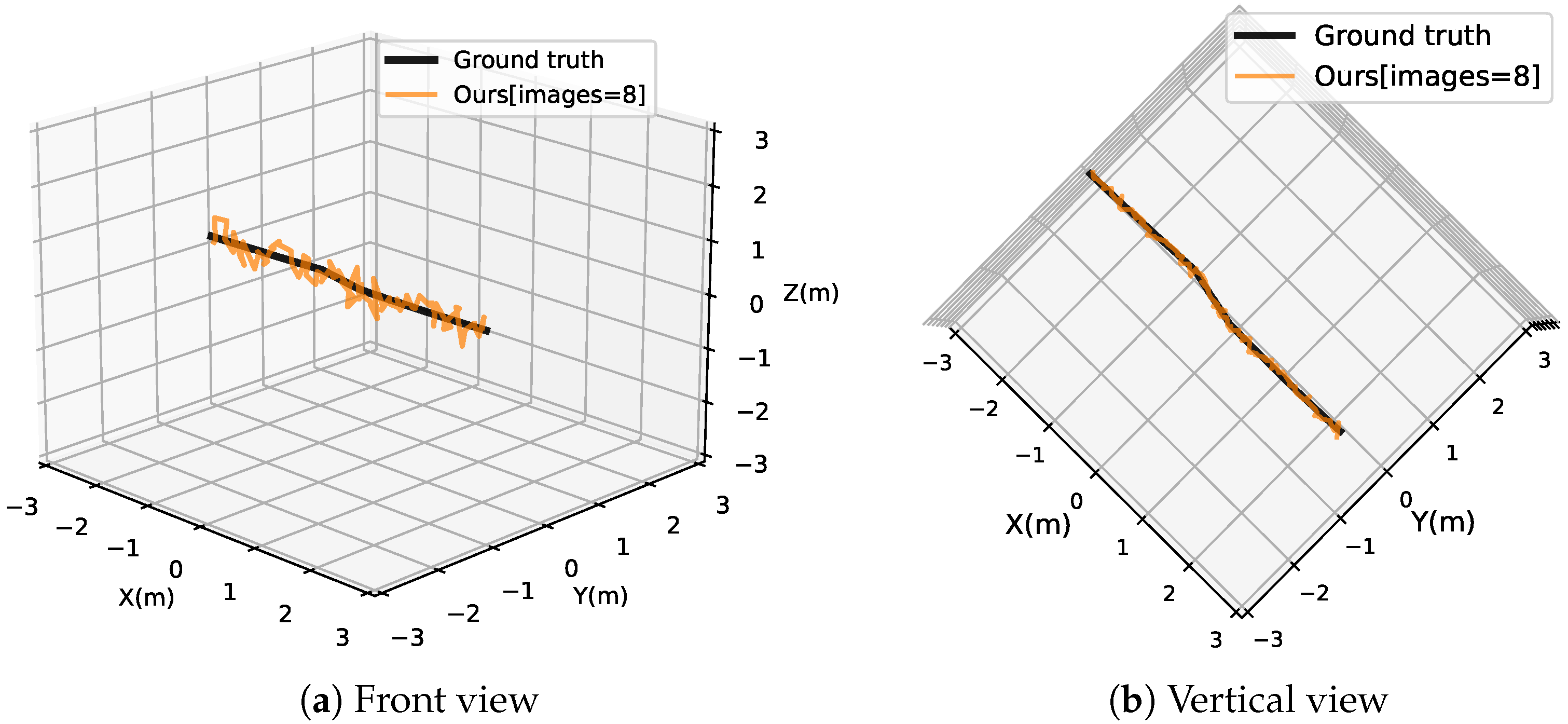
- The effectiveness of the proposed framework was verified via the experiments in simulated and real environments.
2. Methods
2.1. Parameter Regression
2.2. Estimation of Target Altitude
2.3. Corresponding Point Matching
3. Results
3.1. Simulation Experiment
3.2. Evaluation in Real Environment
4. Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Potena, C.; Khanna, R.; Nieto, J.; Siegwart, R.; Nardi, D.; Pretto, A. AgriColMap: Aerial-ground collaborative 3D mapping for precision farming. IEEE Robot. Autom. Lett. 2019, 4, 1085–1092. [Google Scholar] [CrossRef]
- Yuan, Y.; Fang, F.; Zhang, G. Superpixel-based seamless image stitching for UAV images. IEEE Trans. Geosci. Remote Sens. 2020, 59, 1565–1576. [Google Scholar] [CrossRef]
- Zhang, F.; Yang, T.; Liu, L.; Liang, B.; Bai, Y.; Li, J. Image-only real-time incremental UAV image mosaic for multi-strip flight. IEEE Trans. Multimed. 2020, 23, 1410–1425. [Google Scholar] [CrossRef]
- Gautam, D.; Lucieer, A.; Bendig, J.; Malenovskỳ, Z. Footprint determination of a spectroradiometer mounted on an unmanned aircraft system. IEEE Trans. Geosci. Remote Sens. 2019, 58, 3085–3096. [Google Scholar] [CrossRef]
- Zhao, X.; Pu, F.; Wang, Z.; Chen, H.; Xu, Z. Detection, tracking, and geolocation of moving vehicle from uav using monocular camera. IEEE Access 2019, 7, 101160–101170. [Google Scholar] [CrossRef]
- Tang, D.; Fang, Q.; Shen, L.; Hu, T. Onboard detection-tracking-localization. IEEE/ASME Trans. Mechatronics 2020, 25, 1555–1565. [Google Scholar] [CrossRef]
- Deng, F.; Zhang, L.; Gao, F.; Qiu, H.; Gao, X.; Chen, J. Long-range binocular vision target geolocation using handheld electronic devices in outdoor environment. IEEE Trans. Image Process. 2020, 29, 5531–5541. [Google Scholar] [CrossRef] [PubMed]
- Yang, X.; Lin, D.; Zhang, F.; Song, T.; Jiang, T. High accuracy active stand-off target geolocation using UAV platform. In Proceedings of the 2019 IEEE International Conference on Signal, Information and Data Processing (ICSIDP), Chongqing, China, 11–13 December 2019; pp. 1–4. [Google Scholar]
- Cai, Y.; Ding, Y.; Zhang, H.; Xiu, J.; Liu, Z. Geo-location algorithm for building targets in oblique remote sensing images based on deep learning and height estimation. Remote Sens. 2020, 12, 2427. [Google Scholar] [CrossRef]
- Fabian, A.J.; Klenke, R.; Truslow, P. Improving UAV-Based Target Geolocation Accuracy through Automatic Camera Parameter Discovery. In Proceedings of the AIAA Scitech 2020 Forum, Orlando, FL, USA, 6–10 January 2020; p. 2201. [Google Scholar]
- Liu, C.; Liu, J.; Song, Y.; Liang, H. A novel system for correction of relative angular displacement between airborne platform and UAV in target localization. Sensors 2017, 17, 510. [Google Scholar] [CrossRef] [PubMed]
- El Habchi, A.; Moumen, Y.; Zerrouk, I.; Khiati, W.; Berrich, J.; Bouchentouf, T. CGA: A new approach to estimate the geolocation of a ground target from drone aerial imagery. In Proceedings of the 2020 Fourth International Conference On Intelligent Computing in Data Sciences (ICDS), Fez, Morocco, 21–23 October 2020; pp. 1–4. [Google Scholar]
- Namazi, E.; Mester, R.; Lu, C.; Li, J. Geolocation estimation of target vehicles using image processing and geometric computation. Neurocomputing 2022, 499, 35–46. [Google Scholar] [CrossRef]
- Xu, C.; Huang, D.; Liu, J. Target location of unmanned aerial vehicles based on the electro-optical stabilization and tracking platform. Measurement 2019, 147, 106848. [Google Scholar] [CrossRef]
- Bai, G.; Liu, J.; Song, Y.; Zuo, Y. Two-UAV intersection localization system based on the airborne optoelectronic platform. Sensors 2017, 17, 98. [Google Scholar] [CrossRef] [PubMed]
- Carniglia, P.; Balaji, B.; Rajan, S. Geolocation of mobile objects from multiple UAV optical sensor platforms. In Proceedings of the 2018 IEEE SENSORS, New Delhi, India, 28–31 October 2018; pp. 1–4. [Google Scholar]
- Xu, C.; Yin, C.; Han, W.; Wang, D. Two-UAV trajectory planning for cooperative target locating based on airborne visual tracking platform. Electron. Lett. 2020, 56, 301–303. [Google Scholar] [CrossRef]
- Qiao, C.; Ding, Y.; Xu, Y.; Xiu, J. Ground target geolocation based on digital elevation model for airborne wide-area reconnaissance system. J. Appl. Remote Sens. 2018, 12, 016004. [Google Scholar] [CrossRef]
- Gao, F.; Deng, F.; Li, L.; Zhang, L.; Zhu, J.; Yu, C. MGG: Monocular Global Geolocation for Outdoor Long-Range Targets. IEEE Trans. Image Process. 2021, 30, 6349–6363. [Google Scholar] [CrossRef] [PubMed]
- Zhu, J.; Fang, Y. Learning Object-Specific Distance From a Monocular Image. In Proceedings of the 2019 IEEE/CVF International Conference on Computer Vision (ICCV), Seoul, Republic of Korea, 27 October–2 November 2019; pp. 3838–3847. [Google Scholar] [CrossRef]
- Wang, X.; Qin, W.; Bai, Y.; Cui, N. Cooperative target localization using multiple UAVs with out-of-sequence measurements. Aircr. Eng. Aerosp. Technol. 2017, 89, 112–119. [Google Scholar] [CrossRef]
- Xu, C.; Yin, C.; Huang, D.; Han, W.; Wang, D. 3D target localization based on multi–unmanned aerial vehicle cooperation. Meas. Control 2021, 54, 895–907. [Google Scholar] [CrossRef]
- Pachter, M.; Ceccarelli, N.; Chandler, P.R. Vision-based target geolocation using micro air vehicles. J. Guid. Control Dyn. 2008, 31, 597–615. [Google Scholar] [CrossRef]
- Zhang, L.; Deng, F.; Chen, J.; Bi, Y.; Phang, S.K.; Chen, X.; Chen, B.M. Vision-based target three-dimensional geolocation using unmanned aerial vehicles. IEEE Trans. Ind. Electron. 2018, 65, 8052–8061. [Google Scholar] [CrossRef]
- Zhang, L.; Deng, F.; Chen, J.; Bi, Y.; Phang, S.K.; Chen, X. Trajectory planning for improving vision-based target geolocation performance using a quad-rotor UAV. IEEE Trans. Aerosp. Electron. Syst. 2018, 55, 2382–2394. [Google Scholar] [CrossRef]
- Quigley, M.; Conley, K.; Gerkey, B.; Faust, J.; Foote, T.; Leibs, J.; Wheeler, R.; Ng, A.Y. ROS: An open-source Robot Operating System. In Proceedings of the ICRA Workshop on Open Source Software, Kobe, Hyogo, Japan, 12–17 May 2009; Volume 3, p. 5. [Google Scholar]
- Zhu, X.; Lyu, S.; Wang, X.; Zhao, Q. TPH-YOLOv5: Improved YOLOv5 Based on Transformer Prediction Head for Object Detection on Drone-captured Scenarios. In Proceedings of the 2021 IEEE/CVF International Conference on Computer Vision Workshops (ICCVW), Montreal, BC, Canada, 11–17 October 2021; pp. 2778–2788. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Before Filtering | After Filtering | |||||
|---|---|---|---|---|---|---|
| x | y | z | x | y | z | |
| MAE (m) | 0.283 | 0.274 | 1.216 | 0.151 | 0.173 | 0.720 |
| STD (m) | 0.373 | 0.408 | 1.561 | 0.125 | 0.164 | 0.547 |
| MAX (m) | 4.135 | 6.335 | 8.574 | 0.692 | 1.135 | 2.464 |
| Number of Images | MAE | STD | MAX |
|---|---|---|---|
| 4 | 3.372 | 2.769 | 9.812 |
| 8 | 2.448 | 1.931 | 7.819 |
| Number of Images | MAE | STD | MAX | |
|---|---|---|---|---|
| 4 | 7.642 | 4.270 | 13.943 | |
| 6.633 | 3.477 | 13.125 | ||
| 8 | 3.051 | 2.781 | 7.099 | |
| 2.550 | 2.156 | 6.957 |
| Number of Iterations k | 1 | 2 | 3 | 4 | 8 | 12 | 16 | 20 |
|---|---|---|---|---|---|---|---|---|
| 10.448 | 5.931 | 3.819 | 2.769 | 2.815 | 2.635 | 2.864 | 2.448 |
| Number of Images | Flight Altitude | Flight Speed | ||||
|---|---|---|---|---|---|---|
| 8 | 2.8 m | 0.26 m/s | 0.2 m |
| Coordinate | MAE | STD | MAX |
|---|---|---|---|
| X | 0.035 | 0.029 | 0.125 |
| Y | 0.034 | 0.025 | 0.104 |
| Z | 0.159 | 0.113 | 0.446 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pan, T.; Gui, J.; Dong, H.; Deng, B.; Zhao, B. Vision-Based Moving-Target Geolocation Using Dual Unmanned Aerial Vehicles. Remote Sens. 2023, 15, 389. https://doi.org/10.3390/rs15020389
Pan T, Gui J, Dong H, Deng B, Zhao B. Vision-Based Moving-Target Geolocation Using Dual Unmanned Aerial Vehicles. Remote Sensing. 2023; 15(2):389. https://doi.org/10.3390/rs15020389
Chicago/Turabian StylePan, Tingwei, Jianjun Gui, Hongbin Dong, Baosong Deng, and Bingxu Zhao. 2023. "Vision-Based Moving-Target Geolocation Using Dual Unmanned Aerial Vehicles" Remote Sensing 15, no. 2: 389. https://doi.org/10.3390/rs15020389
APA StylePan, T., Gui, J., Dong, H., Deng, B., & Zhao, B. (2023). Vision-Based Moving-Target Geolocation Using Dual Unmanned Aerial Vehicles. Remote Sensing, 15(2), 389. https://doi.org/10.3390/rs15020389