

Using Deep Learning to Map Ionospheric Total Electron Content over Brazil
 , , , , and
, , , , and
Abstract
:1. Introduction
2. Methodology
2.1. TEC Data Processing
- Conversion of STEC to VTEC considering only data collected by satellites with elevation angles above 20°.
- All the IPPs from the VTEC obtained at all available stations are gathered during 5-min intervals.
- At each 5-min, the IPP points are grouped into grid cells in a mesh with 1° resolution for the longitude × latitude plane at the IPP altitude.
- For each grid cell, the average VTEC value is weighted by the elevation angle.
- The Delaunay triangulation [24] process is applied using linear interpolation over the covered area. This interpolation is intended to fill regions with empty grid cells.
- In the last step, a Gaussian low-pass filter is applied to the domain to smooth the grid transitions in the TEC map.
2.2. Reference Data and Metrics
3. Neural Network
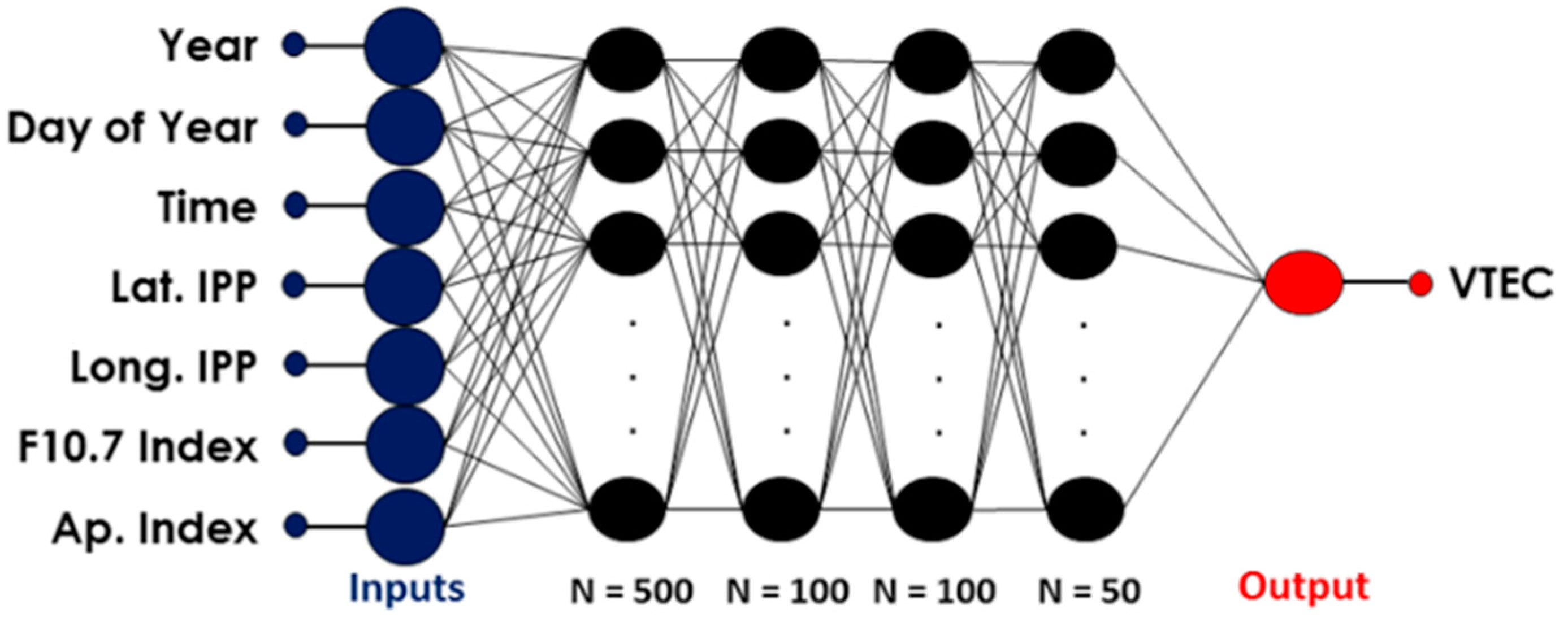
3.1. Neural Network Architecture
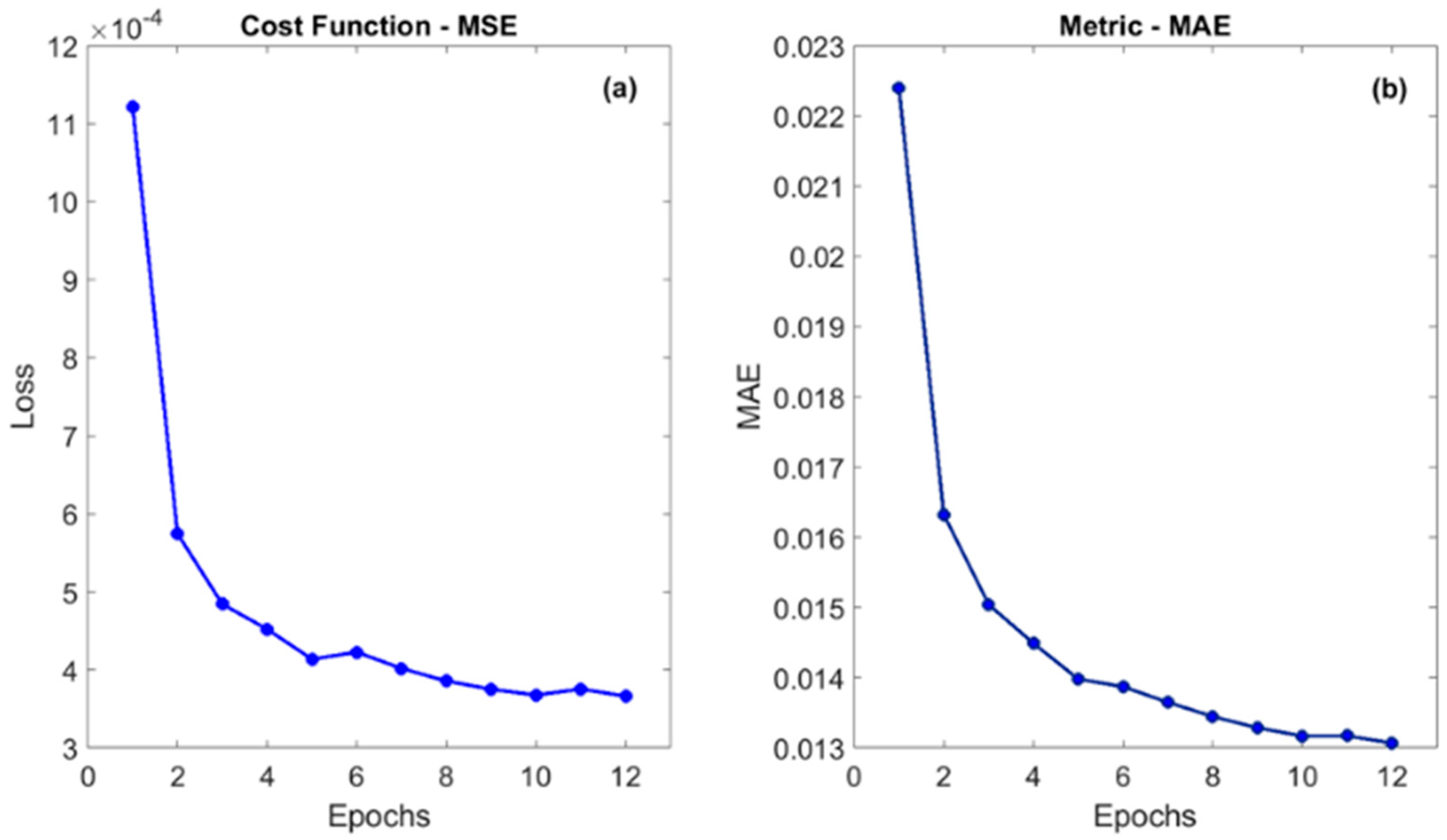
3.2. Neural Network Configuration
3.3. Preprocessing and Training Methodology
4. Model Evaluation
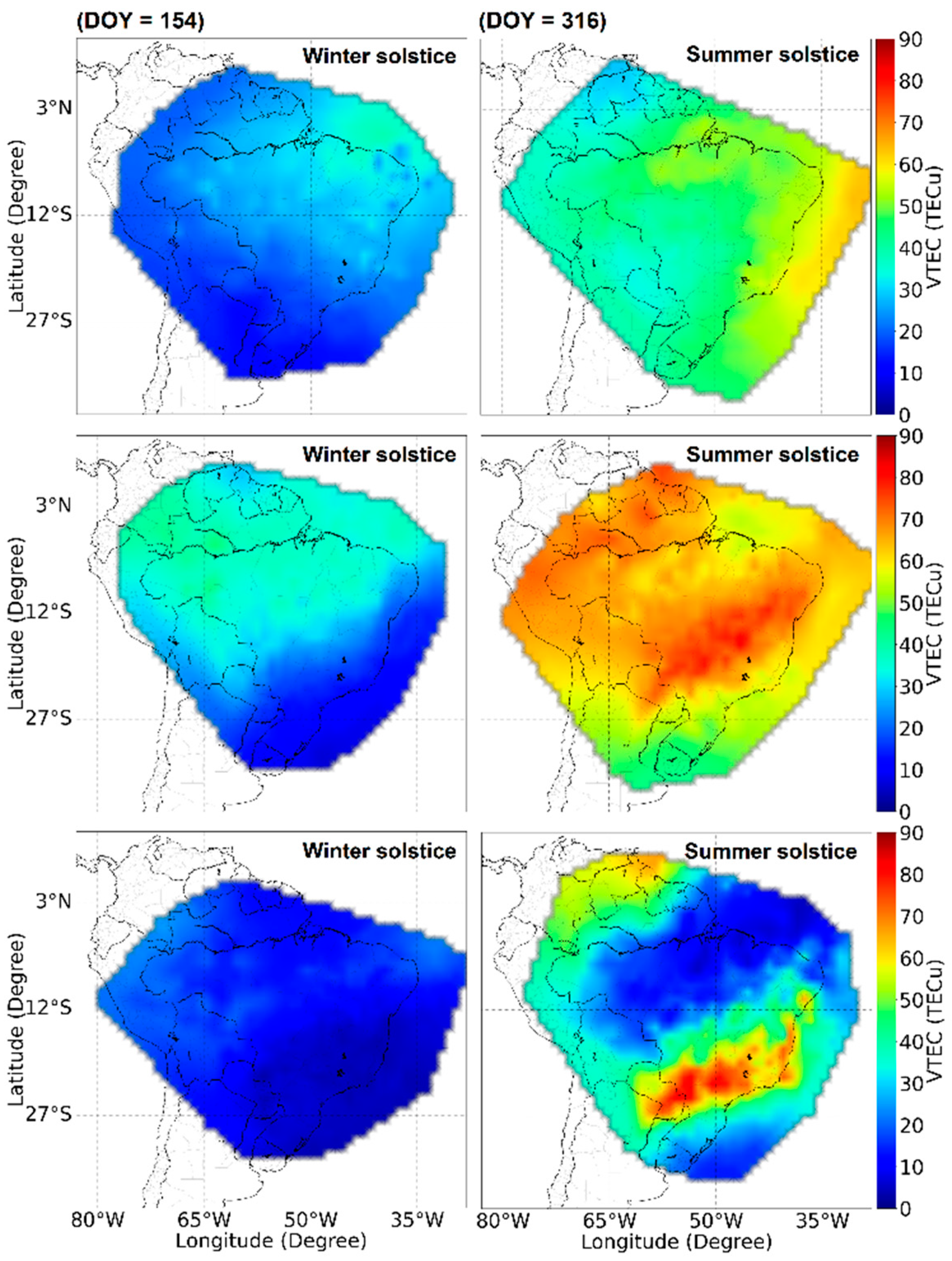
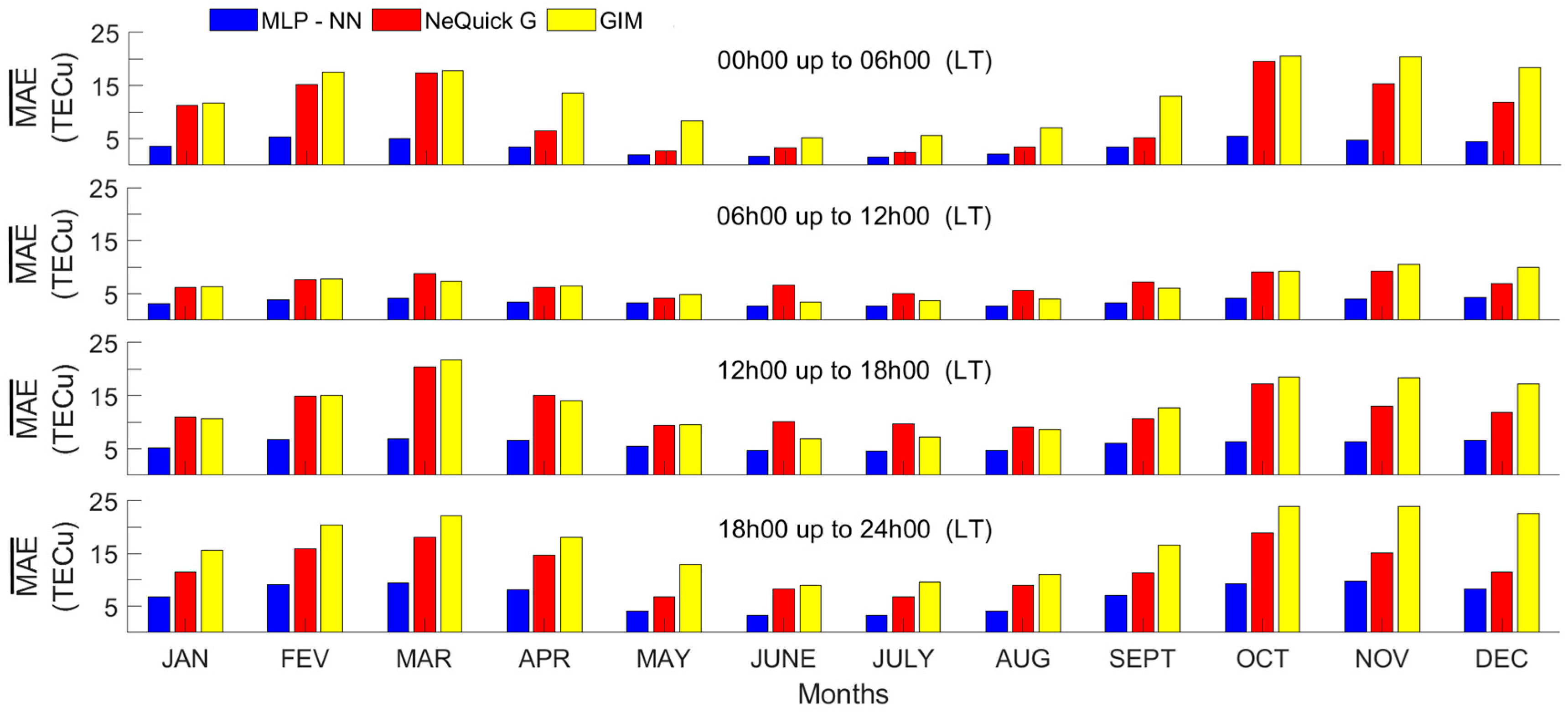
4.1. Evaluation of Ability of Seasonal Representation
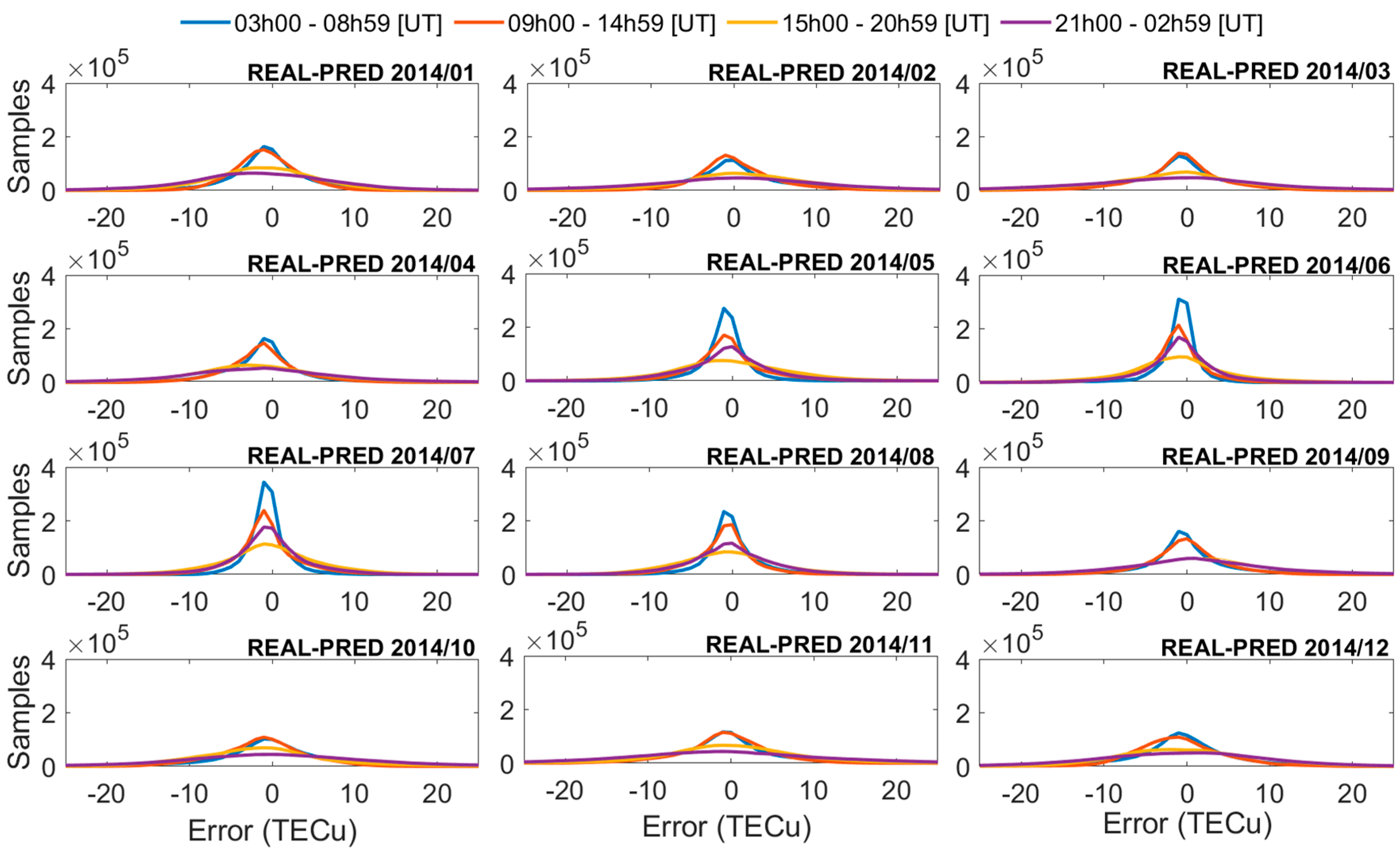
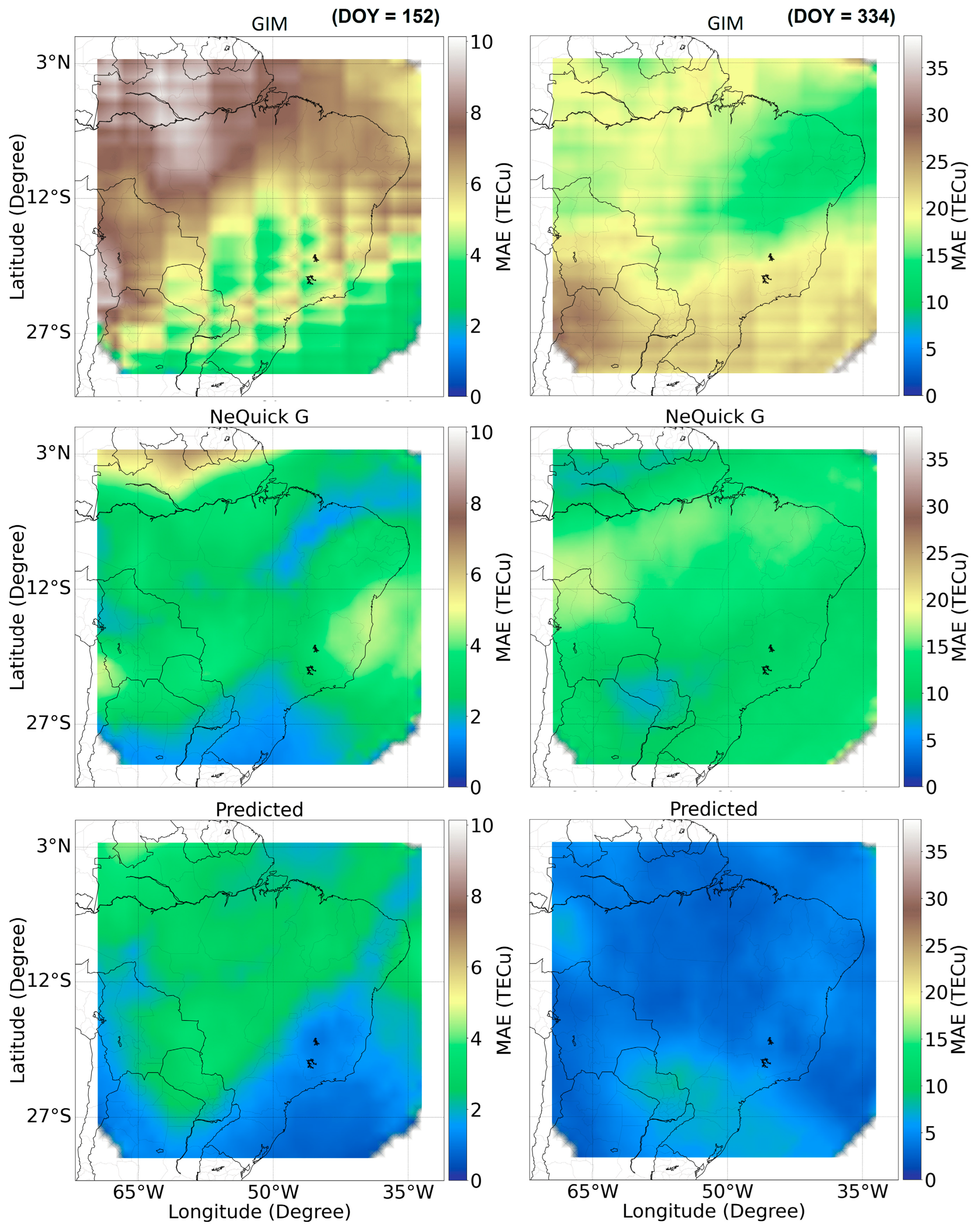
4.2. Evaluation of the Error from a Spatial Coverage Perspective
4.3. Evaluation of the Error According to F10.7 and Ap Indexes
5. Discussion
Positioning Performance
6. Concluding Remarks
- (1)
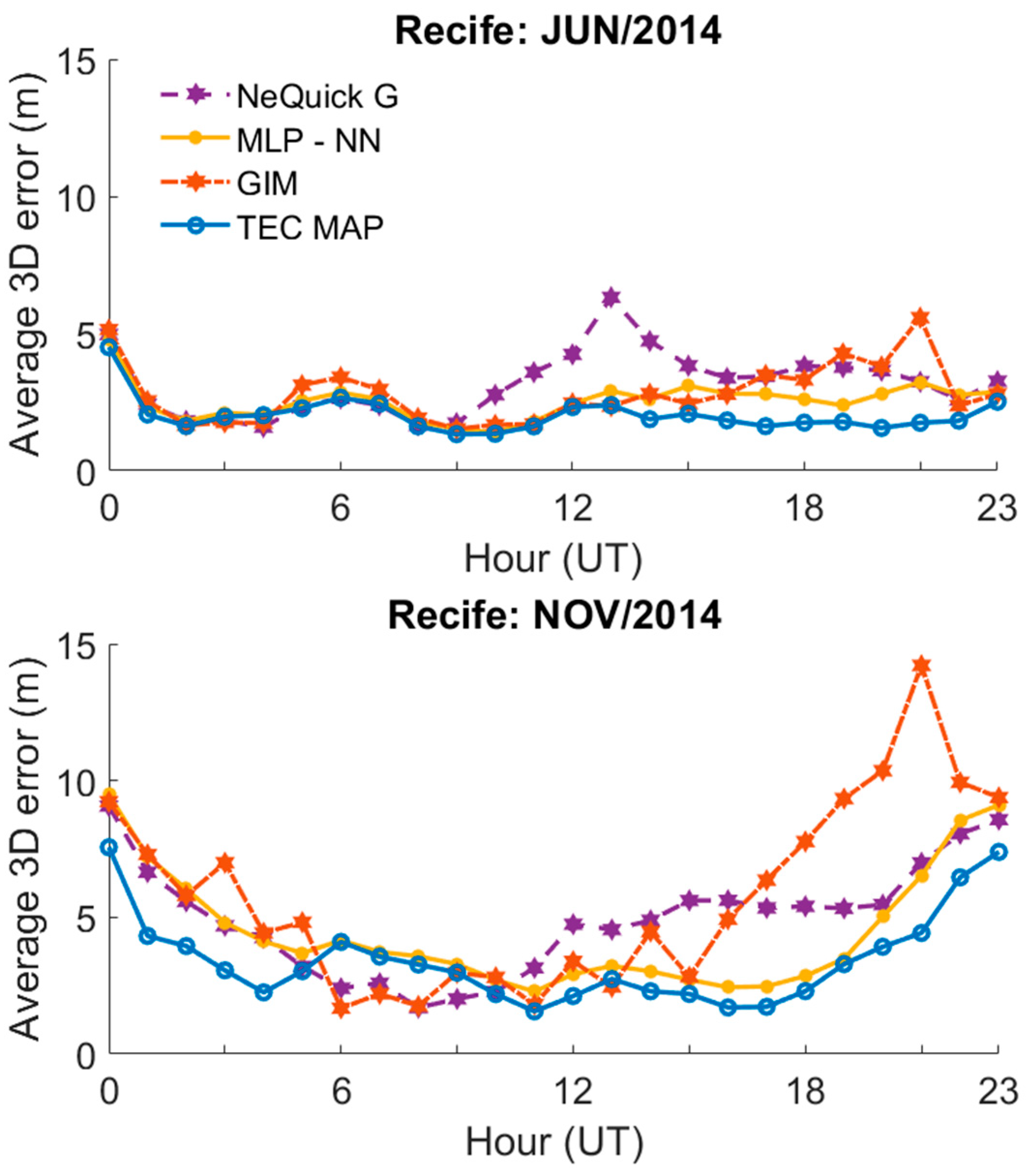
- The average monthly MAE values are smaller (i.e., better) for the proposed MLP-NN for all the months, in all time intervals considered when compared to NeQuick G and to GIM. In some cases, the MLP-NN MAE was 76% less than the GIM MAE.
- (2)
- The analyses of MAE over the entire Brazilian region (e.g., Figure 6) considering two entire days during distinct seasons (June and November) reveals that the MLP-NN spatial error is also qualitatively better than the NeQuick G and GIM.
- (3)
- The evaluation considering distinct solar flux levels reveals MAE values 51.85% better than those from the other data sources (NeQuick G and GIM).
- (4)
- The analysis considering distinct geomagnetic index levels indicate MAE values that are 38.80% and 52.52% better than the other data sources for disturbed and quiet geomagnetic periods, respectively.
- (5)
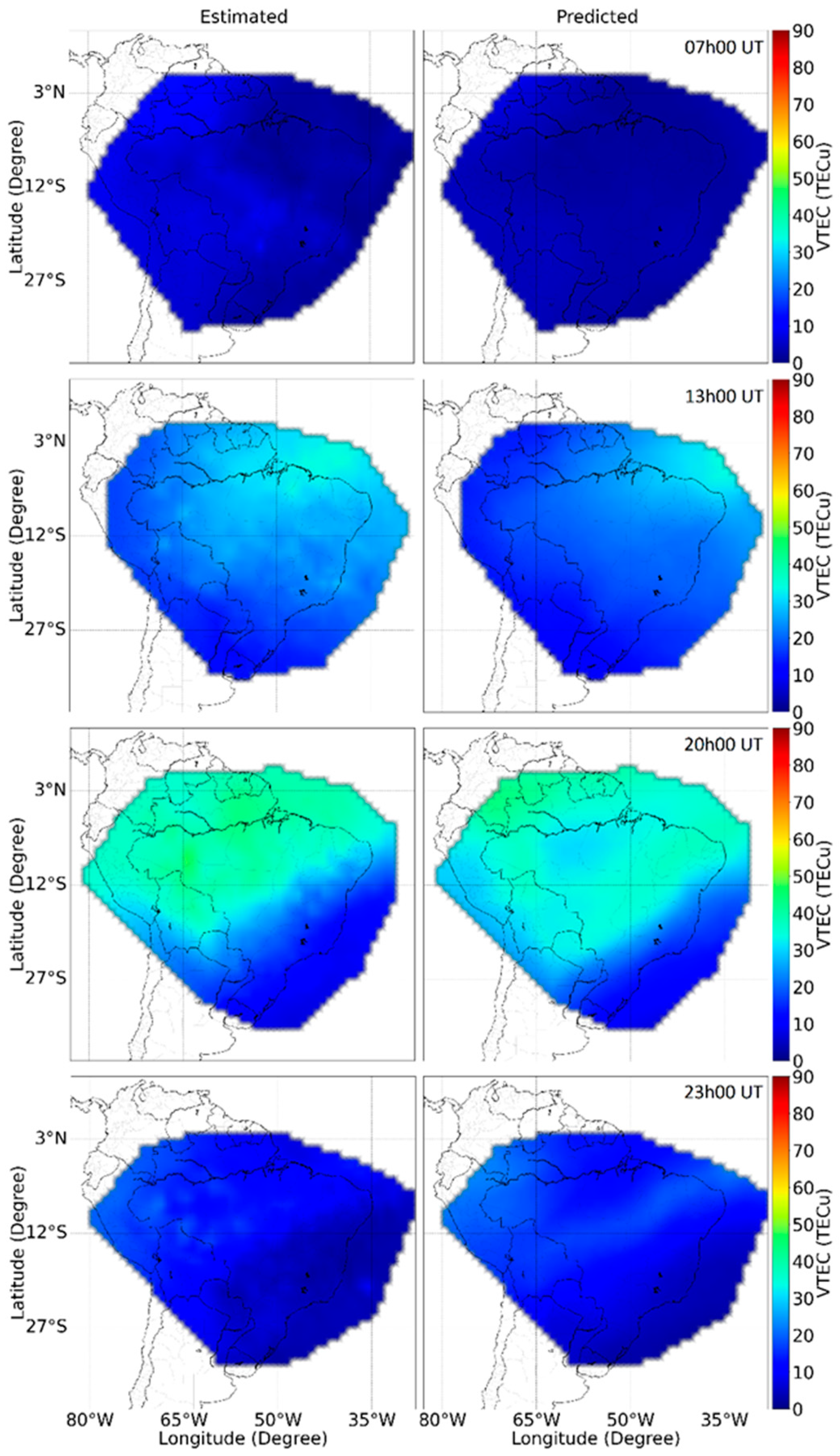
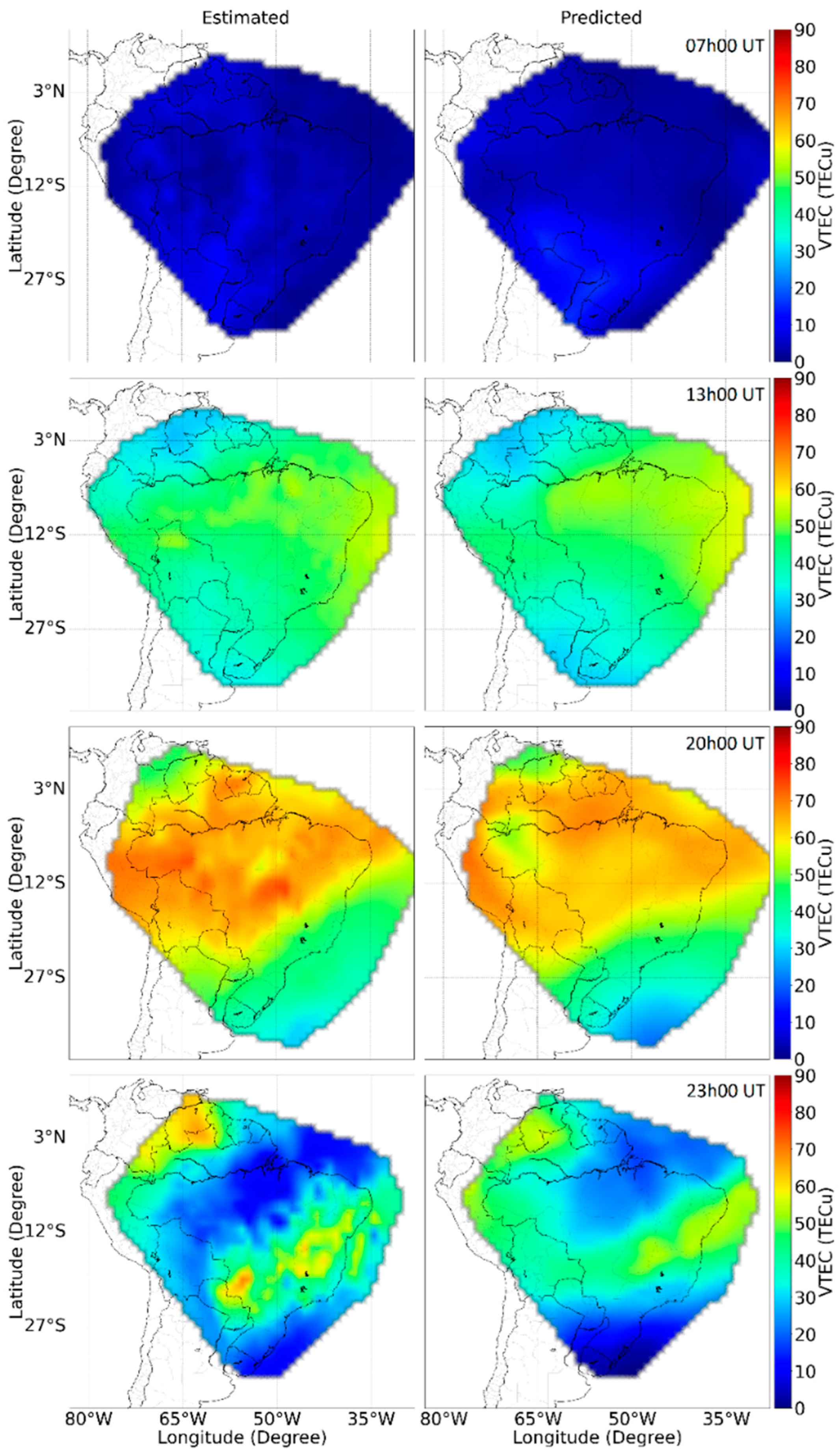
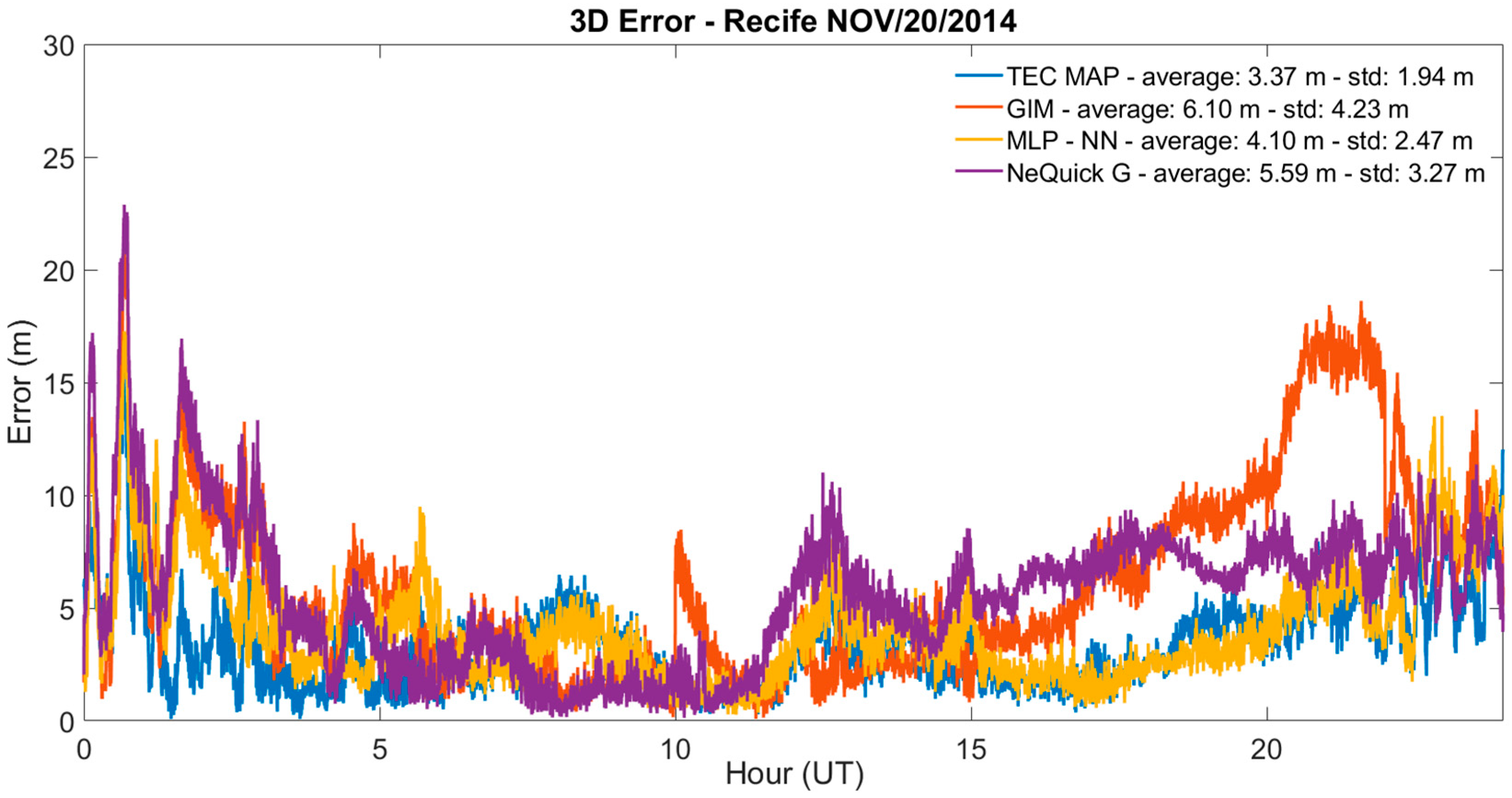
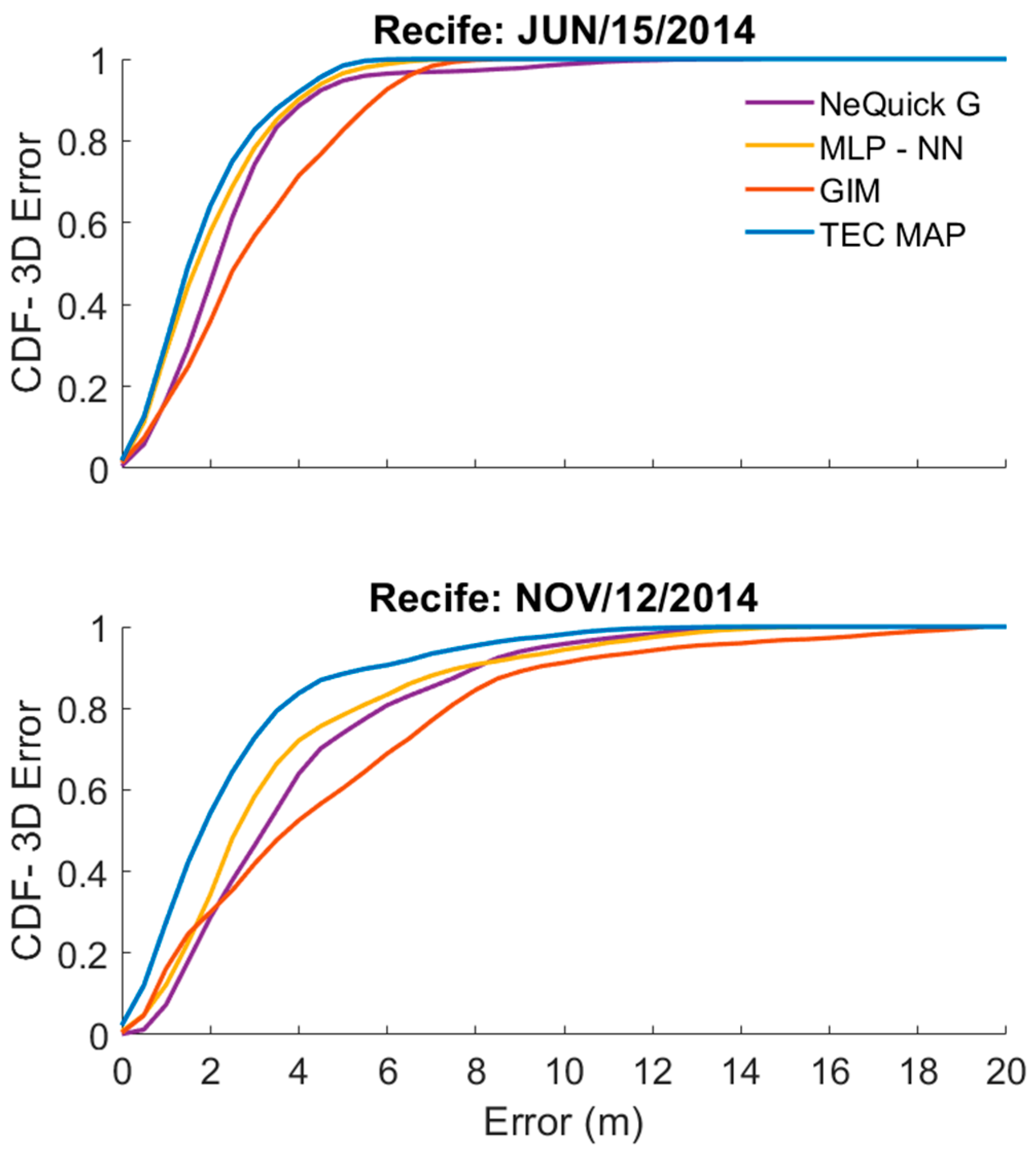
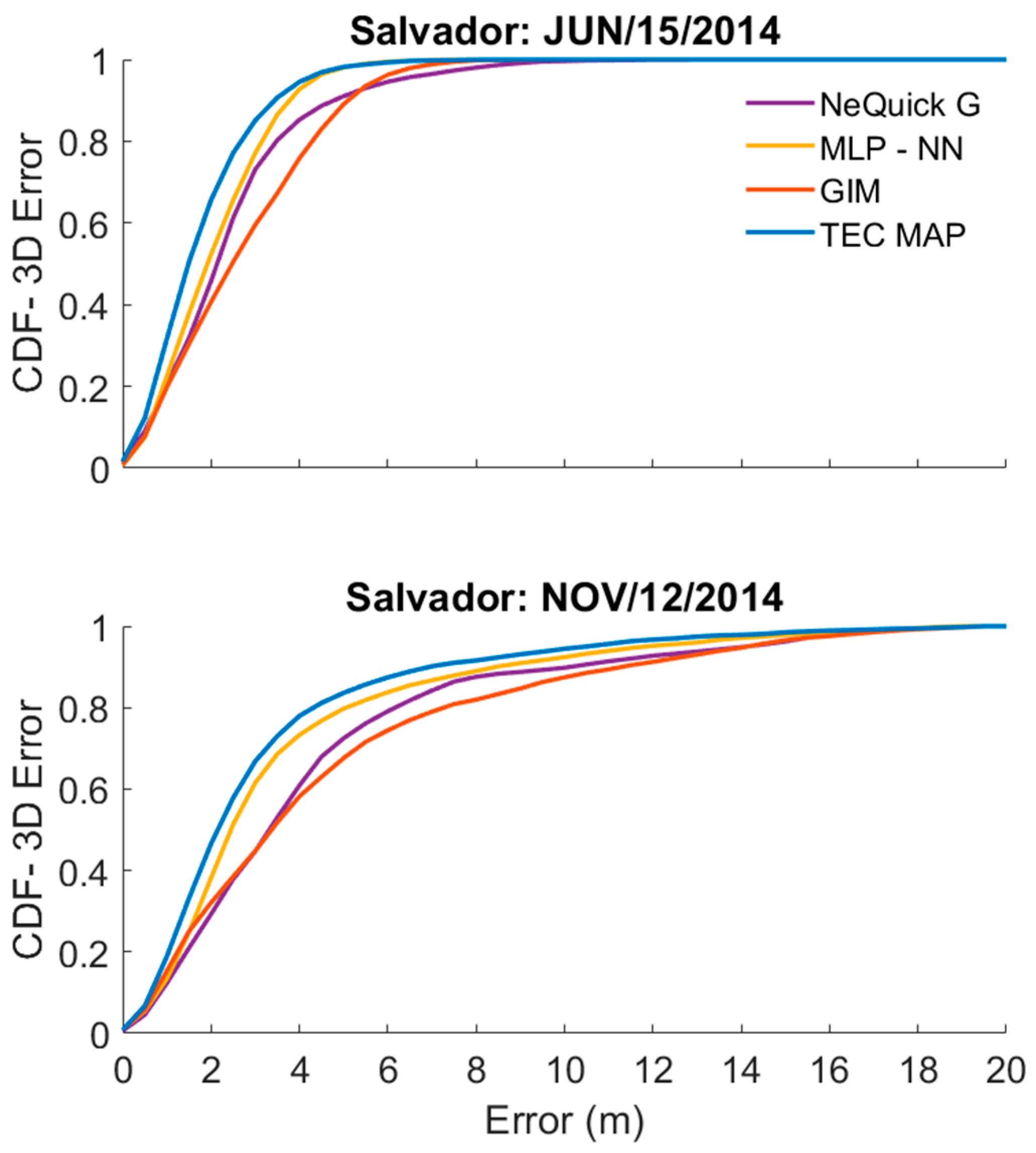
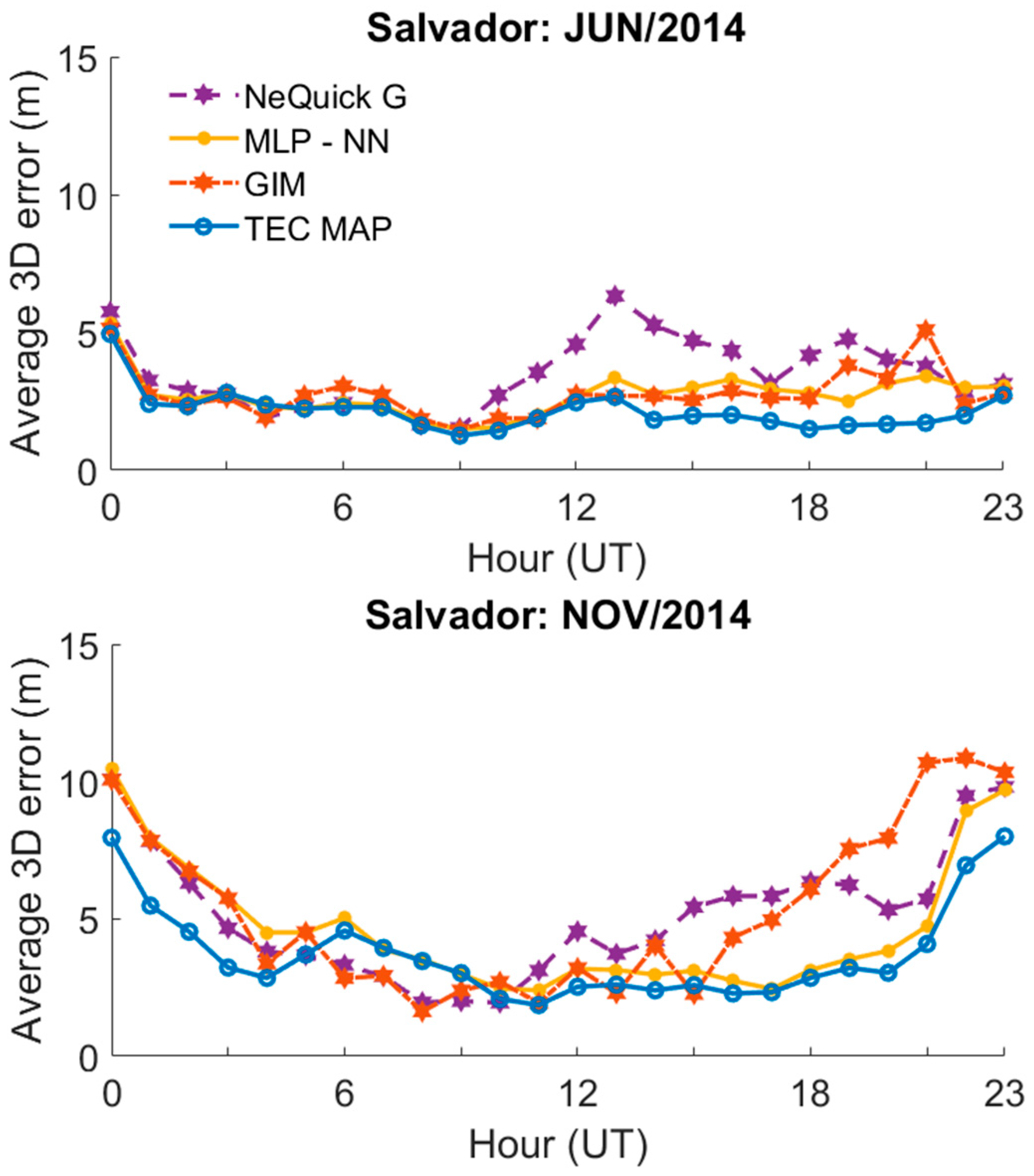
- The analyses of the 3D SPP error are a new feature presented in this work and the results indicate that positioning errors using the vertical TEC forecasted by the proposed MLP-NN are remarkably similar to those obtained using real data of the TEC MAPs. Please observe that the MLP-NN is providing the values in advance (one day ahead).
- (6)
- Considering the example case of November 20, 2014, the single point positioning analysis showed that 3D SPP errors from the MLP-NN were 27% and 33% better (smaller) when compared to NeQuick G and GIM, respectively. For the monthly evaluation improvements up to 22% (June) and 21% (November) were achieved on the same basis of comparison.
- (7)
- The predicted vertical TEC maps using the MLP-NN reproduce the spatiotemporal TEC structure expected over this region, which is not obtained using the other models (e.g., [11]).
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Abdu, M. Outstanding problems in the equatorial ionosphere–thermosphere electrodynamics relevant to spread F. J. Atmos. Solar-Terr. Phys. 2001, 63, 869–884. [Google Scholar] [CrossRef]
- Vankadara, R.K.; Panda, S.K.; Amory-Mazaudier, C.; Fleury, R.; Devanaboyina, V.R.; Pant, T.K.; Jamjareegulgarn, P.; Haq, M.A.; Okoh, D.; Seemala, G.K. Signatures of Equatorial Plasma Bubbles and Ionospheric Scintillations from Magnetometer and GNSS Observations in the Indian Longitudes during the Space Weather Events of Early September 2017. Remote Sens. 2022, 14, 652. [Google Scholar] [CrossRef]
- Abdu, M.A. Electrodynamics of ionospheric weather over low latitudes. Geosci. Lett. 2016, 3, 1–13. [Google Scholar] [CrossRef] [Green Version]
- Sousasantos, J.; Marini-Pereira, L.; Moraes, A.D.O.; Pullen, S. Ground-based augmentation system operation in low latitudes-part 2: Space weather, ionospheric behavior and challenges. J. Aerosp. Technol. Manag. 2021, 13, 1–21. [Google Scholar] [CrossRef]
- Klobuchar, J.A. Ionospheric Time-Delay Algorithm for Single-Frequency GPS Users. IEEE Trans. Aerosp. Electron. Syst. 1987, AES-23, 325–331. [Google Scholar] [CrossRef]
- Bilitza, D.; Altadill, D.; Truhlik, V.; Shubin, V.; Galkin, I.; Reinisch, B.; Huang, X. International Reference Ionosphere 2016: From ionospheric climate to real-time weather predictions. Space Weather. 2017, 15, 418–429. [Google Scholar] [CrossRef]
- European Commission—European GNSS (Galileo). Open Service Ionospheric Correction Algorithm for Galileo Single Frequency Users. Available online: https://www.gsc-europa.eu/sites/default/files/sites/all/files/Galileo_Ionospheric_Model.pdf (accessed on 14 December 2022).
- Schaer, S.; Gurtner, W.; Feltens, J. IONEX: The ionosphere map exchange format version 1.1. In Proceedings of the IGS AC Workshop 1998, Darmstadt, Germany, 9–11 February 1998; Available online: http://ftp.aiub.unibe.ch/ionex/draft/ionex11.pdf (accessed on 14 December 2022).
- Reddybattula, K.D.; Nelapudi, L.S.; Moses, M.; Devanaboyina, V.R.; Ali, M.A.; Jamjareegulgarn, P.; Panda, S.K. Ionospheric TEC Forecasting over an Indian Low Latitude Location Using Long Short-Term Memory (LSTM) Deep Learning Network. Universe 2022, 8, 562. [Google Scholar] [CrossRef]
- Dabbakuti, J.K.; Peesapati, R.; Panda, S.K.; Thummala, S. Modeling and analysis of ionospheric TEC variability from GPS–TEC measurements using SSA model during 24th solar cycle. Acta Astronaut. 2020, 178, 24–35. [Google Scholar] [CrossRef]
- Silva, A.; Sousasantos, J.; Marini-Pereira, L.; Lourenço, L.; Moraes, A.; Abdu, M. Evaluation of the dusk and early nighttime Total Electron Content modeling over the eastern Brazilian region during a solar maximum period. Adv. Space Res. 2021, 67, 1580–1598. [Google Scholar] [CrossRef]
- Belehaki, A.; Jakowski, N.; Reinisch, B. Plasmaspheric electron content derived from GPS TEC and digisonde ionograms. Adv. Space Res. 2004, 33, 833–837. [Google Scholar] [CrossRef]
- Ghaffari Razin, M.R.; Voosoghi, B. Application of Wavelet Neural Networks for Improving of Ionospheric Tomography Re-construction over Iran. J. Earth Sp. Phys. 2018, 44, 99–114. [Google Scholar]
- Mallika, I.L.; Ratnam, D.V.; Ostuka, Y.; Sivavaraprasad, G.; Raman, S. Implementation of Hybrid Ionospheric TEC Forecasting Algorithm Using PCA-NN Method. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2018, 12, 371–381. [Google Scholar] [CrossRef]
- Liu, L.; Zou, S.; Yao, Y.; Wang, Z. Forecasting Global Ionospheric TEC Using Deep Learning Approach. Space Weather 2020, 18, e2020SW002501. [Google Scholar] [CrossRef]
- Cesaroni, C.; Spogli, L.; Aragon-Angel, A.; Fiocca, M.; Dear, V.; De Franceschi, G.; Romano, V. Neural network based model for global Total Electron Content forecasting. J. Space Weather Space Clim. 2020, 10, 11. [Google Scholar] [CrossRef] [Green Version]
- Han, Y.; Wang, L.; Fu, W.; Zhou, H.; Li, T.; Chen, R. Machine Learning-Based Short-Term GPS TEC Forecasting during High Solar Activity and Magnetic Storm Periods. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2021, 15, 115–126. [Google Scholar] [CrossRef]
- Monico, J.F.G.; de Paula, E.R.; Moraes, A.D.O.; Costa, E.; Shimabukuro, M.H.; Alves, D.B.M.; de Souza, J.R.; Camargo, P.D.O.; Prol, F.D.S.; Vani, B.C.; et al. The GNSS NavAer INCT Project Overview and Main Results. J. Aerosp. Technol. Manag. 2022, 14, 1–23. [Google Scholar] [CrossRef]
- de Paula, E.R.; Monico, J.F.G.; Tsuchiya, I.H.; Valladares, C.E.; Costa, S.M.A.; Marini-Pereira, L.; Vani, B.C.; Moraes, A.O. A Retrospective of Global Navigation Satellite System Ionospheric Irregularities Monitoring Networks in Brazil. J. Aerosp. Technol. Manag. 2023, 15, e0123. [Google Scholar] [CrossRef]
- Marini-Pereira, L.; Lourenço, L.F.D.; Sousasantos, J.; Moraes, A.O.; Pullen, S. Regional Ionospheric Delay Mapping for Low-Latitude Environments. Radio Sci. 2020, 55, e2020RS007158. [Google Scholar] [CrossRef]
- Misra, P.; Enge, P. GPS Measurements and Error Sources. In Global Positioning System: Signals. Measurements and Performance, 2nd ed.; Ganga-Jamuna Press: Lincoln, MA, USA, 2006; pp. 147–198. [Google Scholar]
- Ciraolo, L.; Azpilicueta, F.; Brunini, C.; Meza, A.; Radicella, S.M. Calibration errors on experimental slant total electron content (TEC) determined with GPS. J. Geodesy 2006, 81, 111–120. [Google Scholar] [CrossRef]
- Teunissen, P.J.; Montenbruck, O. Springer Handbook of Global Navigation Satellite Systems; Springer International Publishing: New York, NY, USA, 2017; pp. 165–194. [Google Scholar]
- Foster, P.; Evans, A.N. An evaluation of interpolation techniques for reconstructing ionospheric TEC maps. IEEE Trans Geosci Remote Sens. 2008, 46, 2153–2164. [Google Scholar] [CrossRef]
- Morton, Y.J.; van Diggelen, F.; Spilker, J.J., Jr.; Parkinson, B.W.; Lo, S.; Gao, G. Position, Navigation, and Timing Technologies in the 21st Century: Integrated Satellite Navigation, Sensor Systems, and Civil Applications, 1st ed.; John Wiley & Sons: Hoboken, NJ, USA, 2021. [Google Scholar]
- Géron, A. Hands-On Machine Learning with Sckit-Learn, Keras and TensorFlow, 2nd ed.; O’Reilly Media, Inc.: Sebastopol, CA, USA, 2019. [Google Scholar]
- Jason, B. Predict the Future with MLPs, CNNs and LSTMs in Python, 1st ed.; Machine Learning Mastery: San Juan, Porto Rico, 2018. [Google Scholar]
- Goodfellow, I.; Bengio, Y.; Courville, A. Deep Learning, 1st ed.; MIT Press: Boston, MA, USA, 2016. [Google Scholar]
- Haykin, S. Neural Netwoks and Learning Machines, 3rd ed.; Pearson Education: Upper Saddle River, NJ, USA, 2008. [Google Scholar]
- Sobral, J.H.A.; Abdu, M.A.; Takahashi, H.; Taylor, M.J.; De Paula, E.R.; Zamlutti, C.J.; De Aquino, M.G.; Borba, G.L. Ionospheric plasma bubble climatology over Brazil based on 22 years (1977–1998) of 630nm airglow observations. J. Atm. Solar-Terr. Phy. 2002, 64, 1517–1524. [Google Scholar] [CrossRef]
- Alfonsi, L.; Spogli, L.; Pezzopane, M.; Romano, V.; Zuccheretti, E.; De Franceschi, G.; Cabrera, M.A.; Ezquer, R.G. Comparative analysis of spread-F signature and GPS scintillation occurrences at Tucumán, Argentina. J. Geophy. Res. Spc. Phy. 2013, 118, 4483–4502. [Google Scholar] [CrossRef] [Green Version]
- Abdu, M.; Brum, C.; Batista, I.; Sobral, J.; de Paula, E.; Souza, J. Solar flux effects on equatorial ionization anomaly and total electron content over Brazil: Observational results versus IRI representations. Adv. Space Res. 2008, 42, 617–625. [Google Scholar] [CrossRef]
- Rostoker, G. Geomagnetic indices. Rev. Geophys. 1972, 10, 935–950. [Google Scholar] [CrossRef]
- Kaplan, E.; Hegarty, C. Understanding GPS: Principles and Applications, 2nd ed.; Artech House: Norwoor, MA, USA, 2006. [Google Scholar]
- Hopfield, H.S. Two-quartic tropospheric refractivity profile for correcting satellite data. J. Geophys. Res. 1969, 74, 4487–4499. [Google Scholar] [CrossRef]
- Farley, D.T.; Bonelli, E.; Fejer, B.G.; Larsen, M.F. The prereversal enhancement of the zonal electric field in the equatorial ionosphere. J. Geophys. Res. Atmos. 1986, 91, 13723–13728. [Google Scholar] [CrossRef]
- Leandro, R.F.; Santos, M.C. A neural network approach for regional vertical total electron content modelling. Stud. Geophys. Geod. 2007, 51, 279–292. [Google Scholar] [CrossRef]
- Ferreira, A.A.; Borges, R.A.; Paparini, C.; Ciraolo, L.; Radicella, S.M. Short-term estimation of GNSS TEC using a neural network model in Brazil. Adv. Space Res. 2017, 60, 1765–1776. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Layer | Number of Neurons | Activation Function |
|---|---|---|
| 1st | 500 | ReLu |
| 2nd | 100 | ReLu |
| 3rd | 100 | ReLu |
| 4th | 50 | ReLu |
| 5th | 1 | ReLu |
| F10.7 (s.f.u.) | Data Source | (TECu) | σ[MAE] (TECu) | MLP-NN Improvement (%) |
|---|---|---|---|---|
| F10.7 ≥ 150 | MLP-NN | 5.44 | 3.39 | - |
| NeQuick G | 11.44 | 6.25 | 52.44 | |
| GIM | 14.77 | 8.29 | 63.17 | |
| 100 ≤ F10.7 < 150 | MLP-NN | 4.68 | 3.00 | - |
| NeQuick G | 9.72 | 6.28 | 51.85 | |
| GIM | 11.35 | 7.12 | 58.77 | |
| F10.7 < 100 | MLP-NN | 2.22 | 1.53 | - |
| NeQuick G | 6.48 | 5.19 | 65.74 | |
| GIM | 4.94 | 2.42 | 55.06 |
| Ap Index | Data Source | (TECu) | σ[MAE] (TECu) | MLP-NN Improvement (%) |
|---|---|---|---|---|
| Ap ≥ 27 | MLP-NN | 8.28 | 3.83 | - |
| NeQuick G | 13.53 | 4.80 | 38.80 | |
| GIM | 15.16 | 6.57 | 45.38 | |
| Ap < 27 | MLP-NN | 4.90 | 3.18 | - |
| NeQuick G | 10.32 | 6.33 | 52.52 | |
| GIM | 12.56 | 7.84 | 60.99 |
| 3D Error | MODEL | Recife | Salvador | ||
|---|---|---|---|---|---|
| MEAN (m) | STD (m) | MEAN (m) | STD (m) | ||
| JUN | GIM | 2.81 | 1.94 | 2.77 | 2.03 |
| NeQuick G | 3.16 | 2.26 | 3.50 | 2.55 | |
| MLP-NN | 2.53 | 1.82 | 2.72 | 2.04 | |
| TEC MAP | 2.03 | 1.62 | 2.15 | 1.86 | |
| NOV | GIM | 5.71 | 3.95 | 5.30 | 3.84 |
| NeQuick G | 4.92 | 3.08 | 5.17 | 3.45 | |
| MLP-NN | 4.47 | 3.26 | 4.65 | 3.47 | |
| TEC MAP | 3.43 | 2.51 | 3.73 | 2.74 | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Silva, A.; Moraes, A.; Sousasantos, J.; Maximo, M.; Vani, B.; Faria, C., Jr. Using Deep Learning to Map Ionospheric Total Electron Content over Brazil. Remote Sens. 2023, 15, 412. https://doi.org/10.3390/rs15020412
Silva A, Moraes A, Sousasantos J, Maximo M, Vani B, Faria C Jr. Using Deep Learning to Map Ionospheric Total Electron Content over Brazil. Remote Sensing. 2023; 15(2):412. https://doi.org/10.3390/rs15020412
Chicago/Turabian StyleSilva, Andre, Alison Moraes, Jonas Sousasantos, Marcos Maximo, Bruno Vani, and Clodoaldo Faria, Jr. 2023. "Using Deep Learning to Map Ionospheric Total Electron Content over Brazil" Remote Sensing 15, no. 2: 412. https://doi.org/10.3390/rs15020412
APA StyleSilva, A., Moraes, A., Sousasantos, J., Maximo, M., Vani, B., & Faria, C., Jr. (2023). Using Deep Learning to Map Ionospheric Total Electron Content over Brazil. Remote Sensing, 15(2), 412. https://doi.org/10.3390/rs15020412