The Gravity field and steady-state Ocean Circulation Explorer (GOCE) gravity gradient satellite was launched in March 2009 and ended its mission in November 2013 [
1]. The High-Level Processing Facility (HPF) working group used the time-wise, direct, and space-wise methods, respectively, to solve a series of static gravity field products, such as the TIM_R1~TIM_R6, SPW_R1~SPW_R5, DIR_R1~DIR_R6 gravity field models, based on the data of star camera, gravity gradiometer, and GPS receiver [
2,
3,
4,
5,
6,
7,
8,
9]. In addition to the HPF working group, other institutes around the world have also made their solutions available, categorized by the method used to solve the gravity field model [
10,
11,
12,
13,
14,
15,
16,
17,
18]. Currently, the accuracy of the gravity field models acquired via the GOCE satellite can achieve 1 mGal for gravity anomaly and 2 cm for geoid height accuracy at a spatial scale of 100 km [
19]. Furthermore, related products have been widely employed in oceanography, seismology, and other scientific disciplines to enhance our understanding of their mechanisms [
20,
21,
22,
23,
24,
25,
26,
27].
Due to the gravity gradiometer’s design, it allows only for a limited Measurement Bandwidth (MBW) and excessive noise outside of the MBW, particularly in the low-frequency region. Therefore, to improve the inversion accuracy of the gravity field model using GOCE gradient data, the gradient data needs to be filtered [
28,
29]. Three methods have been proposed in several papers to attenuate the effect of colored noise in the gradiometer data on the gravity field recovery. The first method involves constructing a variance–covariance matrix based on the post-fit residuals [
11,
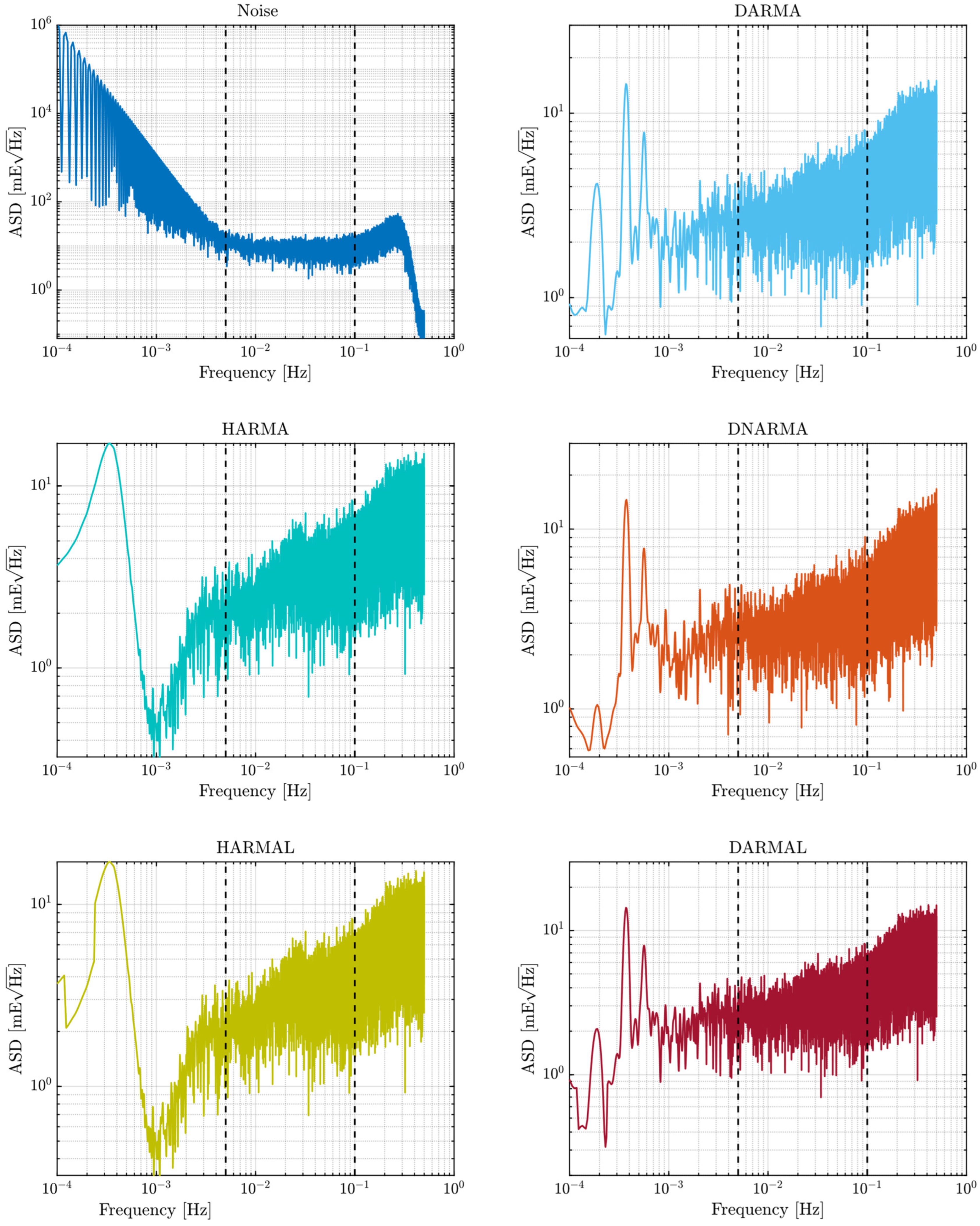
12]. The advantage of the method is that it will not be unaffected by data discontinuity. However, as the arc length increases, the variance–covariance matrix’s dimension rises, consuming more computer sources and lowering the effectiveness of the final solution. Therefore, only shorter arc lengths are available, and long-period noise needs be absorbed by introducing empirical parameters. The second approach is to design appropriate filters based on the power spectral density (PSD) of the posterior residuals [
4,
30,
31,
32,
33,
34], such as the high-pass filter, notch filter, autoregressive moving average filter (ARMA), cascade filter (composed of differential filter, ARMA filter, and notch filter), to achieve the goal of reducing colored noise. Xu, et al. [
14] analyzed the measurement error of the GOCE gradient and simulated it based on an AR model. Zhu, et al. [
35] proposed an optimal ARMA filtering model for gravity gradient error based on the priori error PSD. To filter the low-frequency systematic error and colored noise of the gravity gradient, Zhou, et al. [
36] developed a cascade filter using a combination of MA and AR. According to Liu, et al. [
37], the cascade filters for the MA and CPR empirical parameter approaches in conjunction with ARMA were built to process the low-frequency systematic error and colored noise of the gravity gradient data, respectively. This approach can flexibly select alternative filter types depending on the observed data’s error characteristics. Additionally, the method is not limited by the number of observations and offers improved computational efficiency by convolving both sides of the observation equation. As a result, longer arcs can be selected to better account for the effects of long-period errors. However, it is essential to ensure that the data are consistent throughout the calculation since the method constructs the filter based on the PSD of the post-fit residuals. The third method is similar to the second method’s conceptual design, but with the difference that it requires immediate processing with band-pass filters, such as FIR (Finite Impulse Response) filtering (Wan, et al. [
38]) or IIR (Infinite Impulse Response) band-pass filter. Pitenis, et al. [
39] analyzed the effectiveness of three filters, FIR, IIR, and wavelet multiresolution analysis. The ideal filtering parameters are determined by conducting several experiments for each filtering scheme. The results show that all three filtering strategies are effective in removing low-frequency errors while preserving the signals in the GOCE MBW, with FIR filtering providing the best overall results. Each of these three methods has its own advantages and disadvantages. Among them, the first two methods, in addition to incorporating the signal in the band range of the gravity gradiometer, also consider the measurement information in the low-frequency part to recover the gravity field model. To suppress the colored noise outside the MBW more effectively, the third approach only takes the observation information within the MBW to recover the gravity field model. Currently, research institutions around the world adopted different solution strategies for the gravity field inversion, including various data segmentation options, maximum degree of model, regularization techniques, filters, as well as whether to include other satellite observation data. All these factors will affect the final solution, with the most significant impact coming from the choice of filters. Since it is not possible to quantify the influence of other aspects, we cannot compare the solution models of each institution to make an independent and valid assessment of the performance of different filters.
As the first gravity satellite mission carrying a gravity gradiometer, how to process the gravity gradient data and obtain a high-precision gravity field model as much as possible is one of the key research contents of GOCE data processing. With the increase in observation data and the accumulation of processing experience, the previous data processing methods have been continuously improved and updated. Up to now, official agencies have provided several versions of gradient data. In comparison to the most recent release in 2019, the earlier versions of data (the data product is coded 0103) can only attain relatively high accuracy in the frequency band of 0.005~0.1 Hz [
28,
29]. The precision of the latest version of data (the data product is coded 0202) in the low-frequency part is improved by adopting an updated data processing algorithm [
40]. Based on this version gradient data, Chen, et al. [
15] compared IIR bandpass filters with different orders before using the 8th-order IIR bandpass filter to process the data from 2009.11 to 2013.10 and fused the Tongji-Grace02s model to solve the Tongji-GOGR2019S model. Schubert and Brockmann [
5,
41] compared the results of the old and new versions of the gradient data and discovered that the updated calibration method improved the precision of the
component. They built an AR filter based on the posterior residuals rather than the cascade filter that was used to solve the TIM_R1~TIM_R5 model. The accuracy of the combined solution based on the new version of data has improved by 20% overall compared to the previous data version. Most of the gravity field models for the GOCE satellites from various groups that have been published on the ICGEM website (
http://icgem.gfz-potsdam.de (accessed on 20 September 2023)) are based on the old version of the gradient data. Further research is needed to determine whether the current gradient filtering algorithms satisfy the requirements for the solution accuracy and whether there are better-combined filtering algorithms for the processing of gradient data as the improvement of the gradient data measurement band.
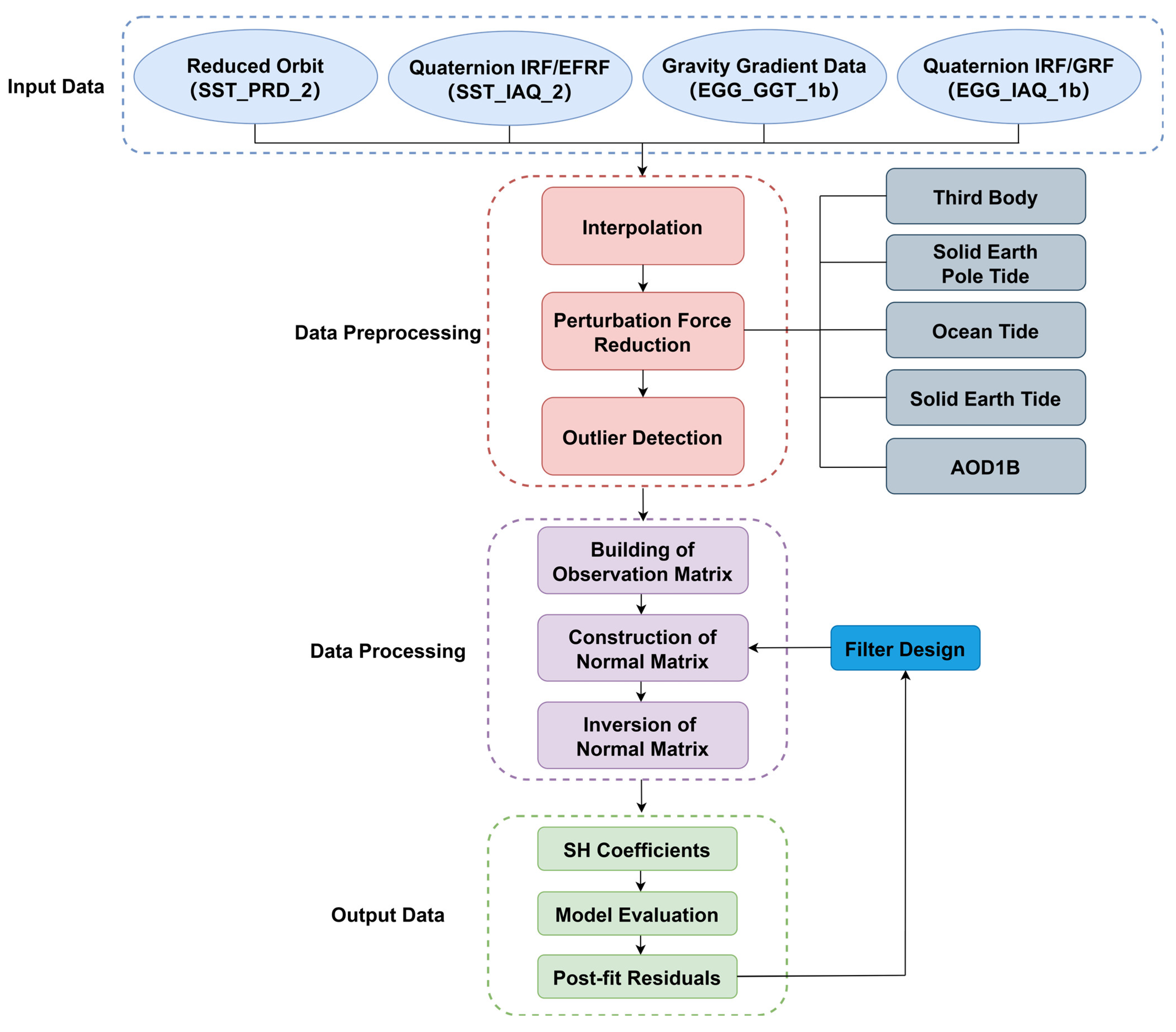
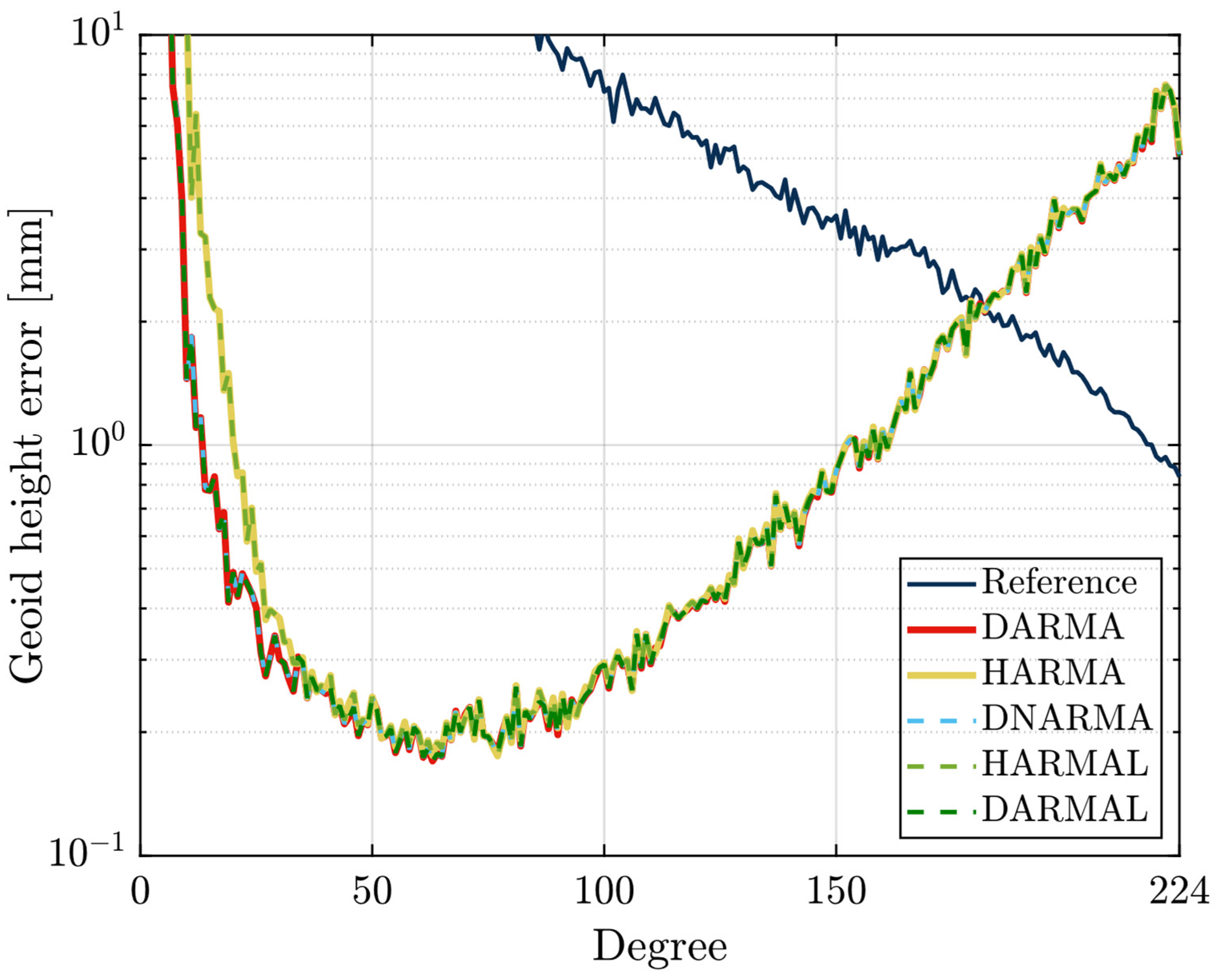
Given this, several filter combinations are designed based on the current commonly used filter algorithms in this paper. Then, the data segment from 1 November 2009 to 11 January 2010 (in terms of
component) is selected to recover the gravity field using the developed software based on the time-wise method, and the effects of different filters on the inversion of the gravity field of GOCE gradient data are analyzed.
Section 2 introduced multiple filtering strategies as well as the fundamentals of gravity field recovery.
Section 3 used the GOCE gradient data to examine how various filters affect the gravity solution. The conclusion of the filter selection in GOCE data processing for the measured data is presented in
Section 4.




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}








