
First Assessment of Bistatic Geometric Calibration and Geolocation Accuracy of Innovative Spaceborne Synthetic Aperture Radar LuTan-1

 ,
,  ,
,
Abstract
:1. Introduction
2. Material and Methods
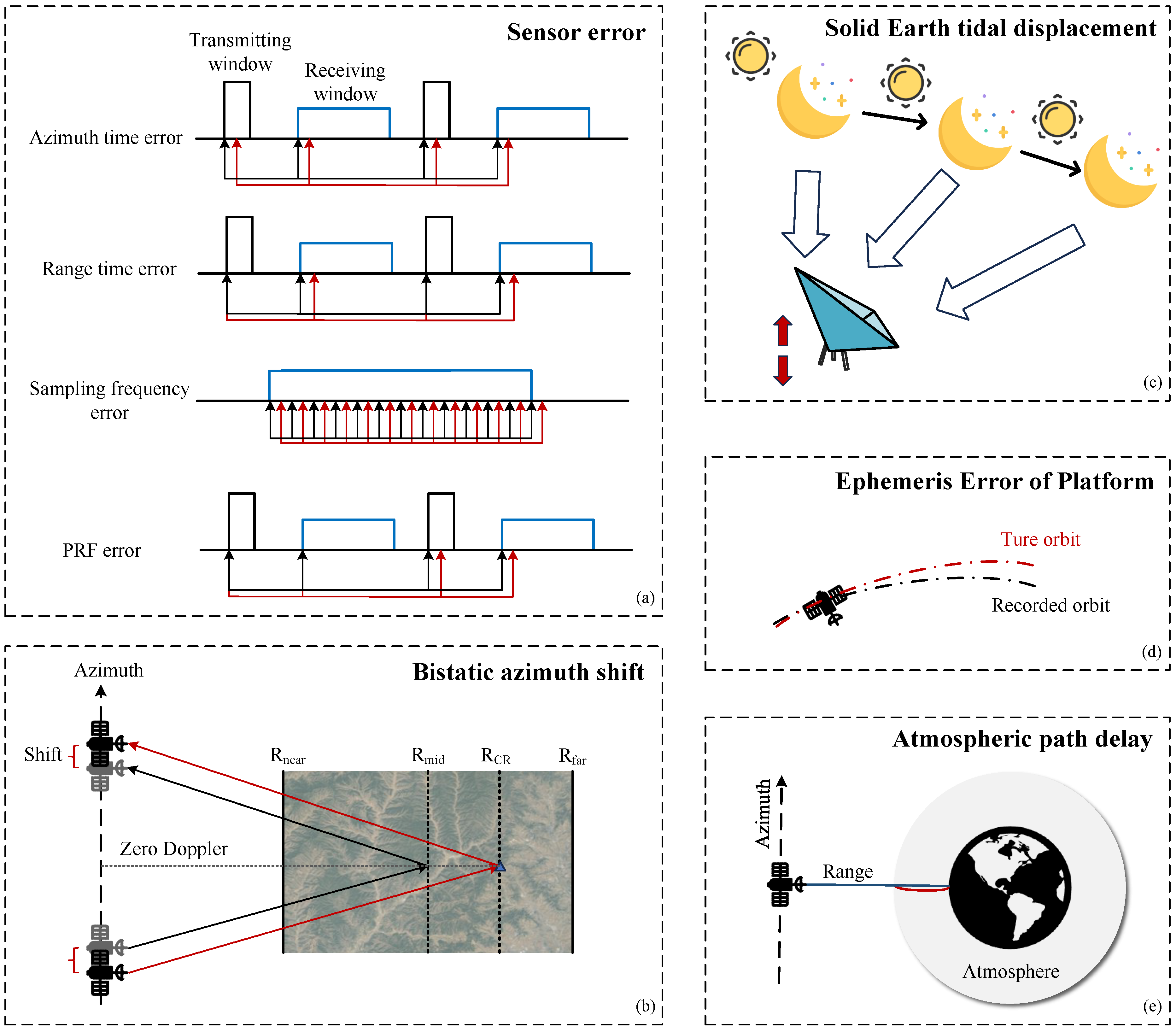
2.1. Geometric Distortions
- 1.
- Sensor error.
- Azimuth time error.
- Range time error.
- Sampling frequency error.
- PRF error.
- 2.
- Bistatic azimuth shift.
- 3.
- Solid Earth tidal displacement.
- 4.
- Ephemeris error of platform.
- 5.
- Atmospheric path delay.
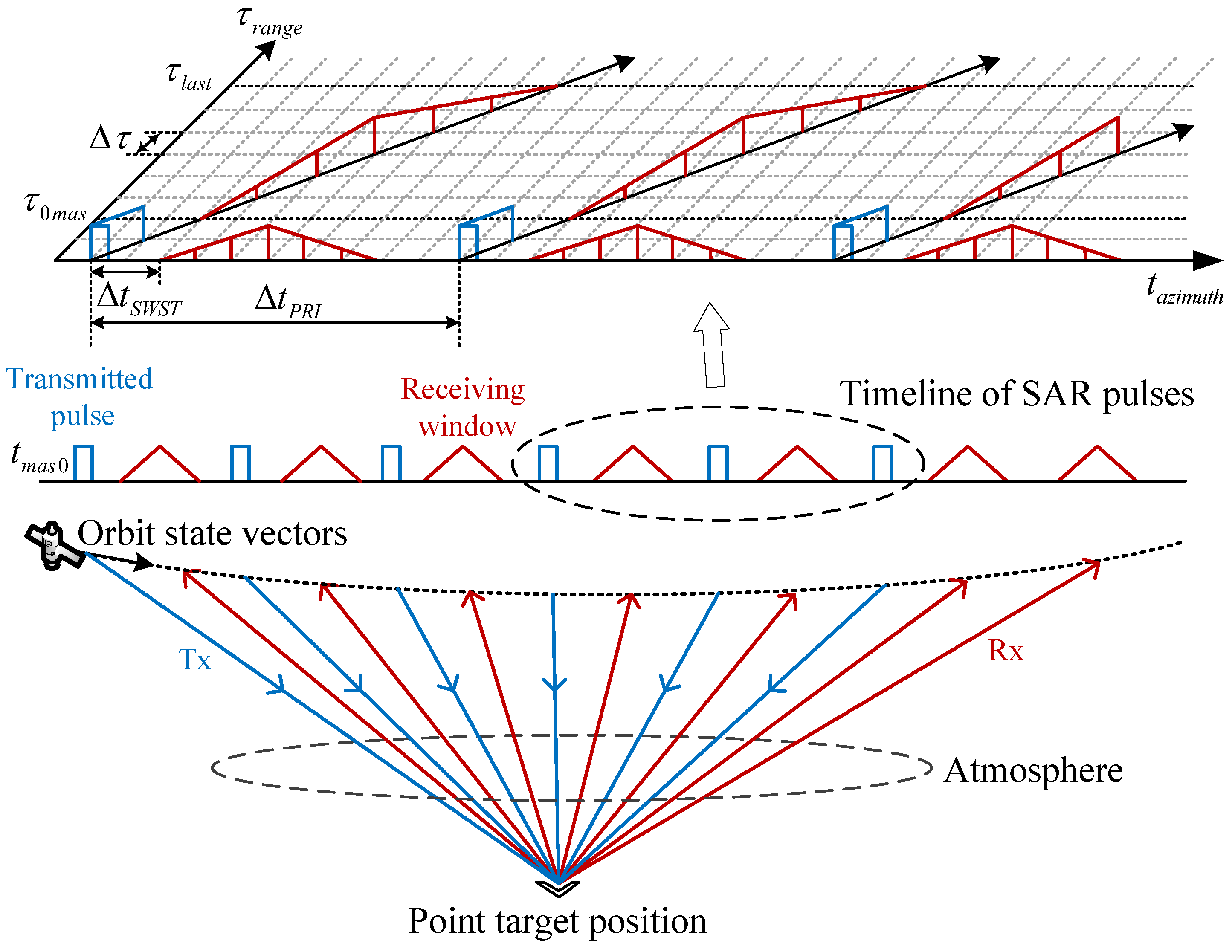
2.2. Geometric Calibration Model of Master SAR
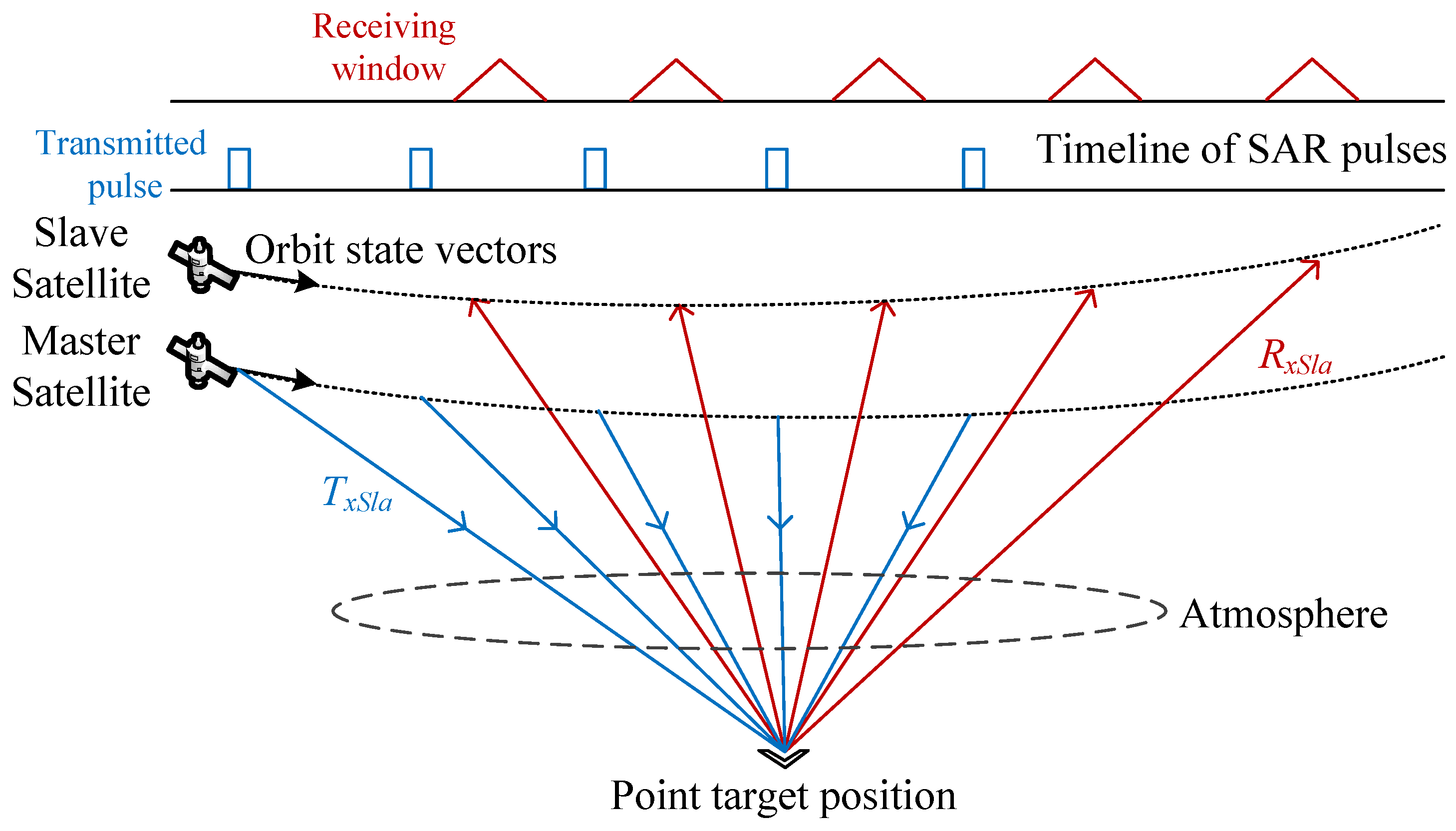
2.3. Geometric Calibration Model of Slave SAR
2.4. Atmospheric Path Delay Correction
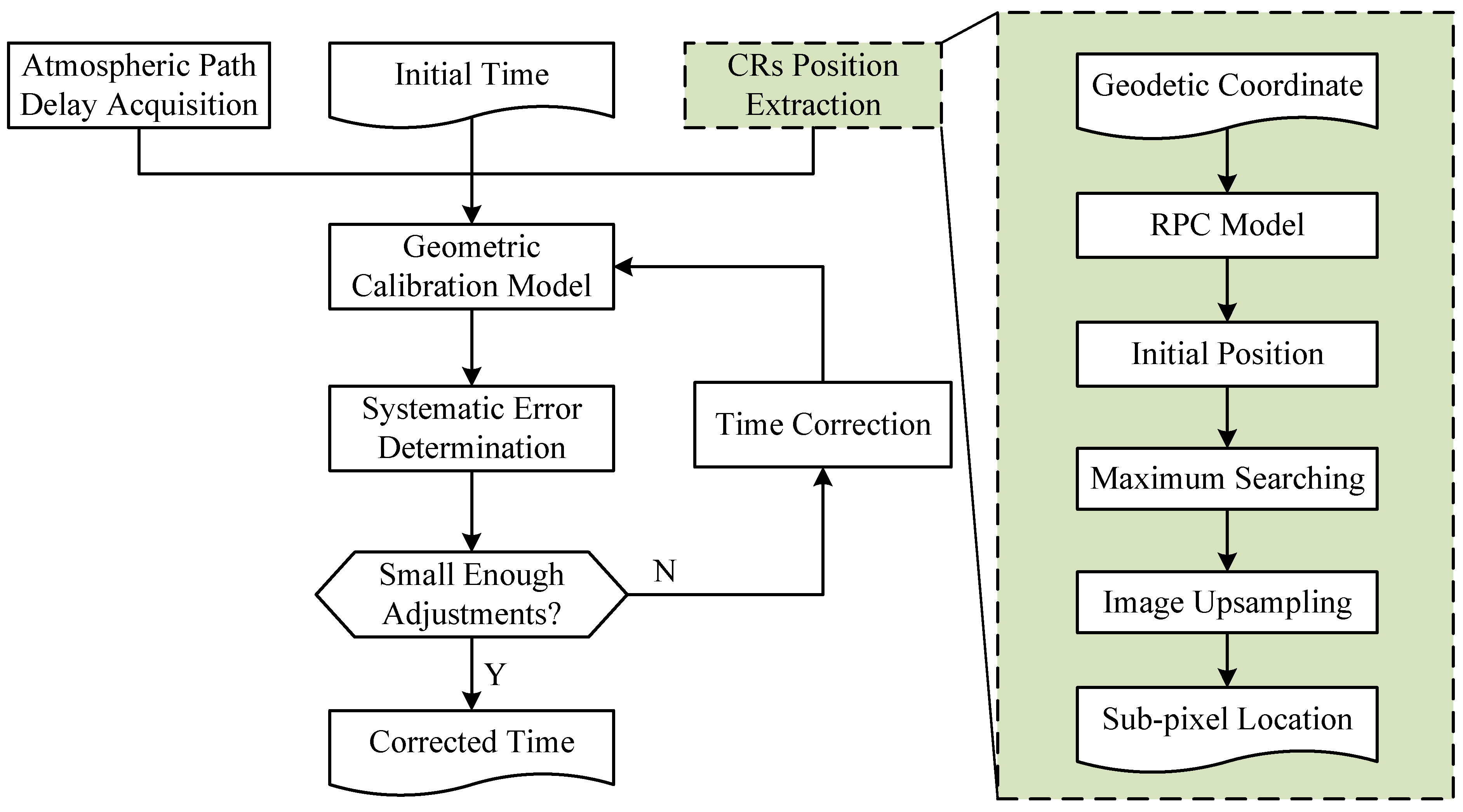
2.5. Model Resolving
| Algorithm 1 Calibration parameter derivation. |
| Input: SLC images and their auxiliary files, coordinates of CRs, and atmospheric delay. |
| Initialization: Set the initial values of the calibration parameters as (0,0) and . Repeat the following steps until is smaller than : |
| Step 1: Compute the Jacobian matrix using Equations (25) and (29). |
| Step 2: Calculate the error matrix using based on Equations (6) and (14). |
| Step 3: Compute the best unbiased estimation of p using . |
| Step 4: Calculate the best estimation of as . |
| Step 5: Update the initial values of the calibration parameters to . |
| Step 6: Update the value of with . |
| Output: Calibration parameter . |
3. Results and Analysis
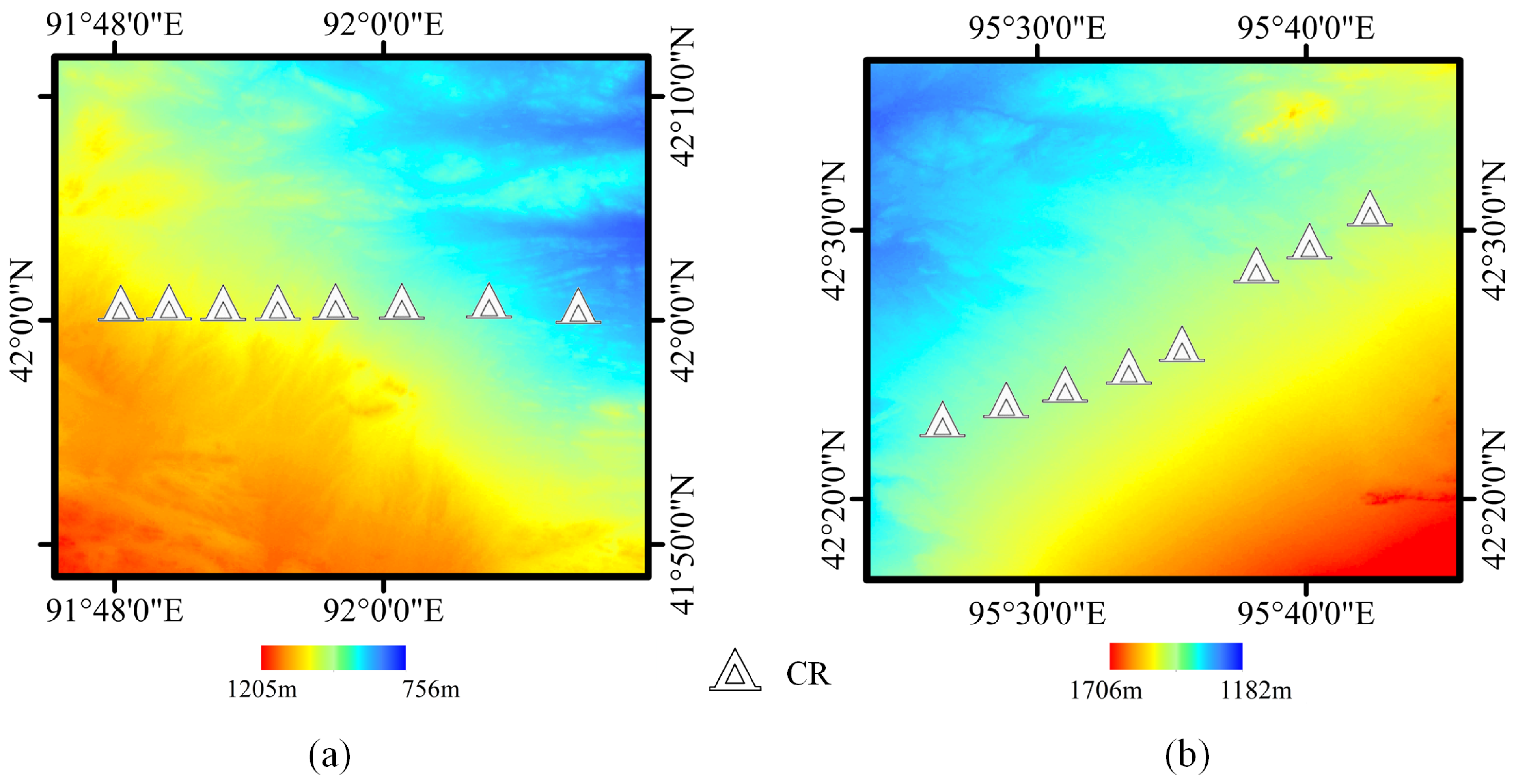
3.1. Study Area and Datasets
3.2. Geometric Calibration of Example Data
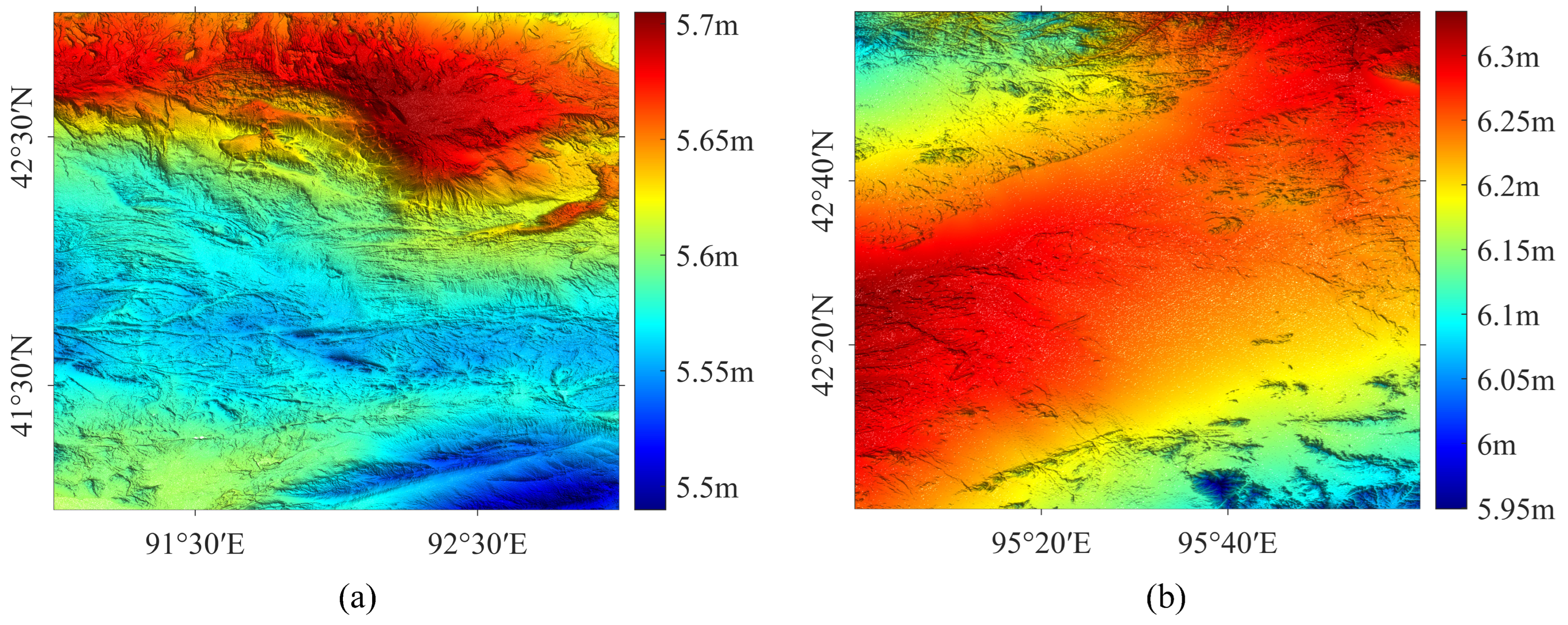
3.2.1. Atmospheric Path Delay Acquisition
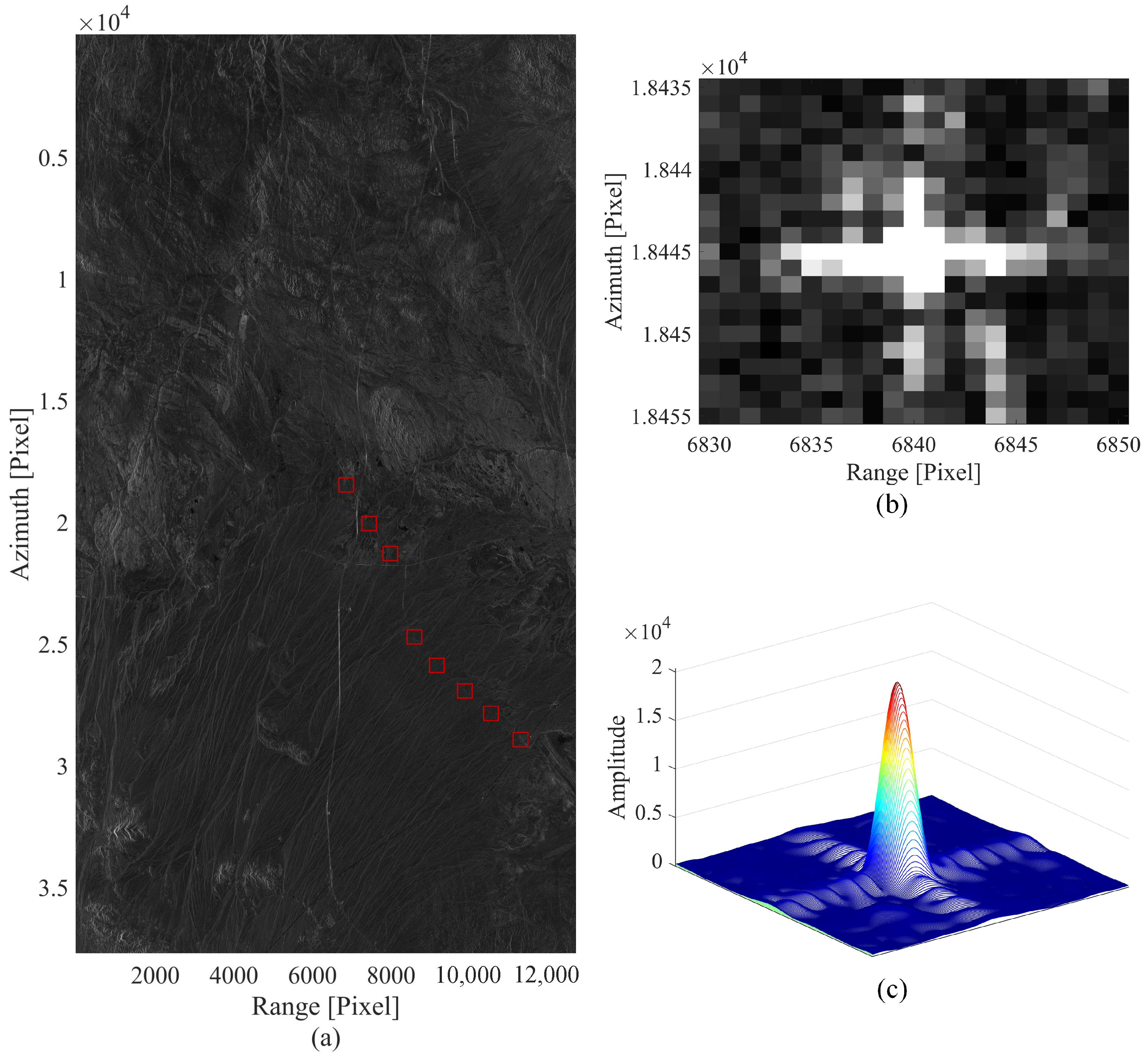
3.2.2. CRs Position Extraction
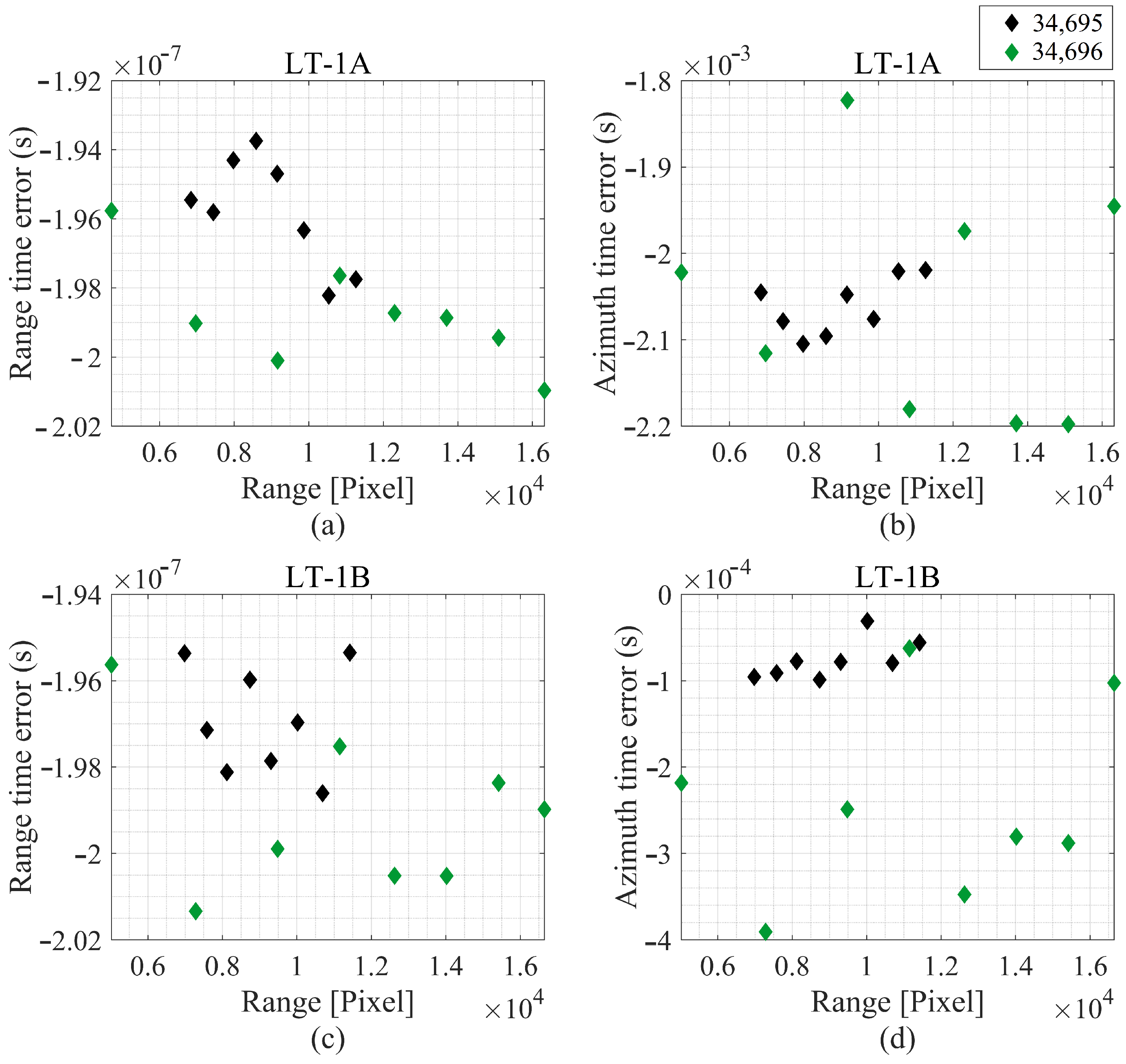
3.2.3. Systematic Error Determination
3.3. Long-Term Monitoring of Geometric Calibration
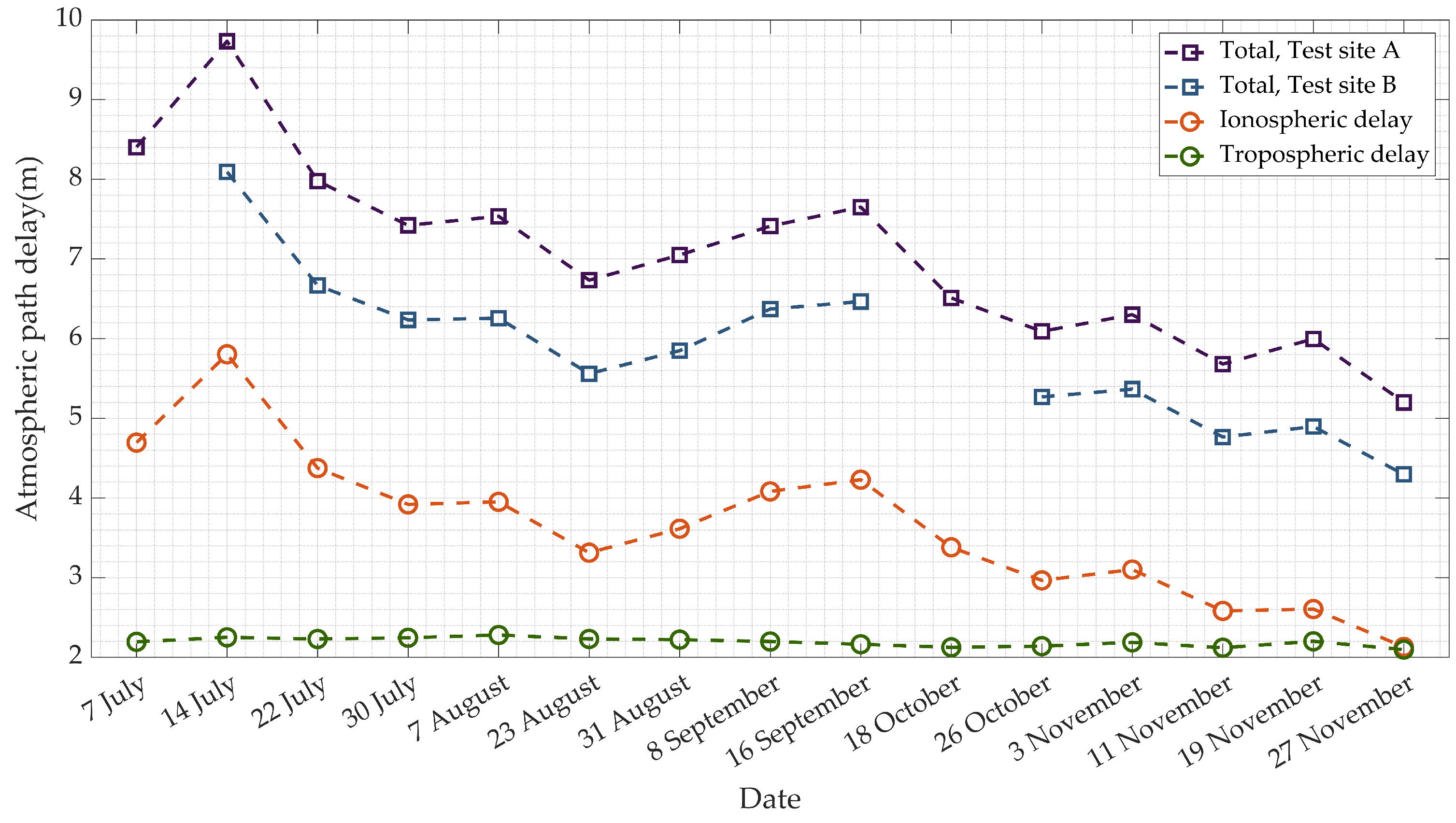
3.3.1. Atmospheric Path Delay Acquisition
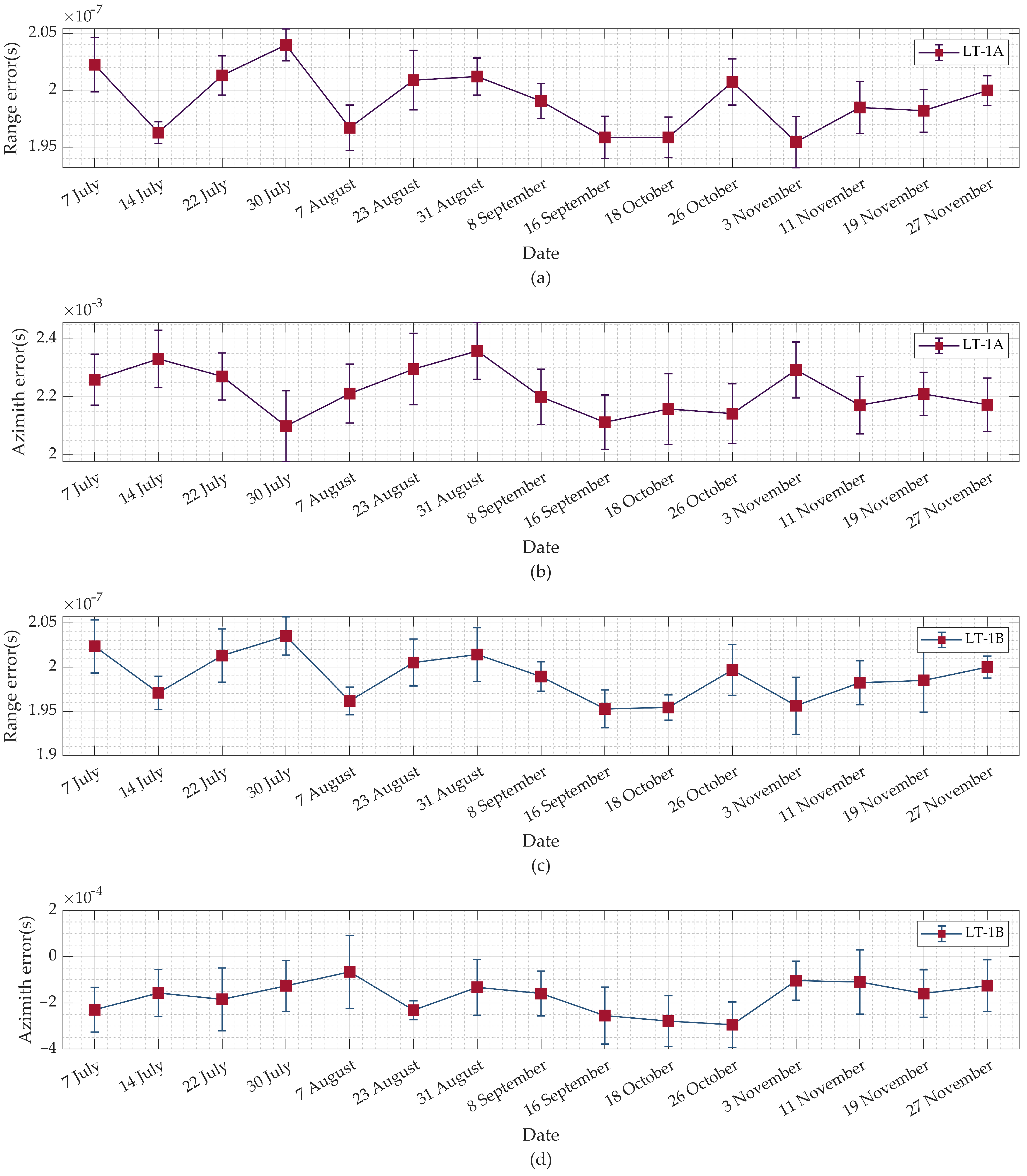
3.3.2. Systematic Error Determination
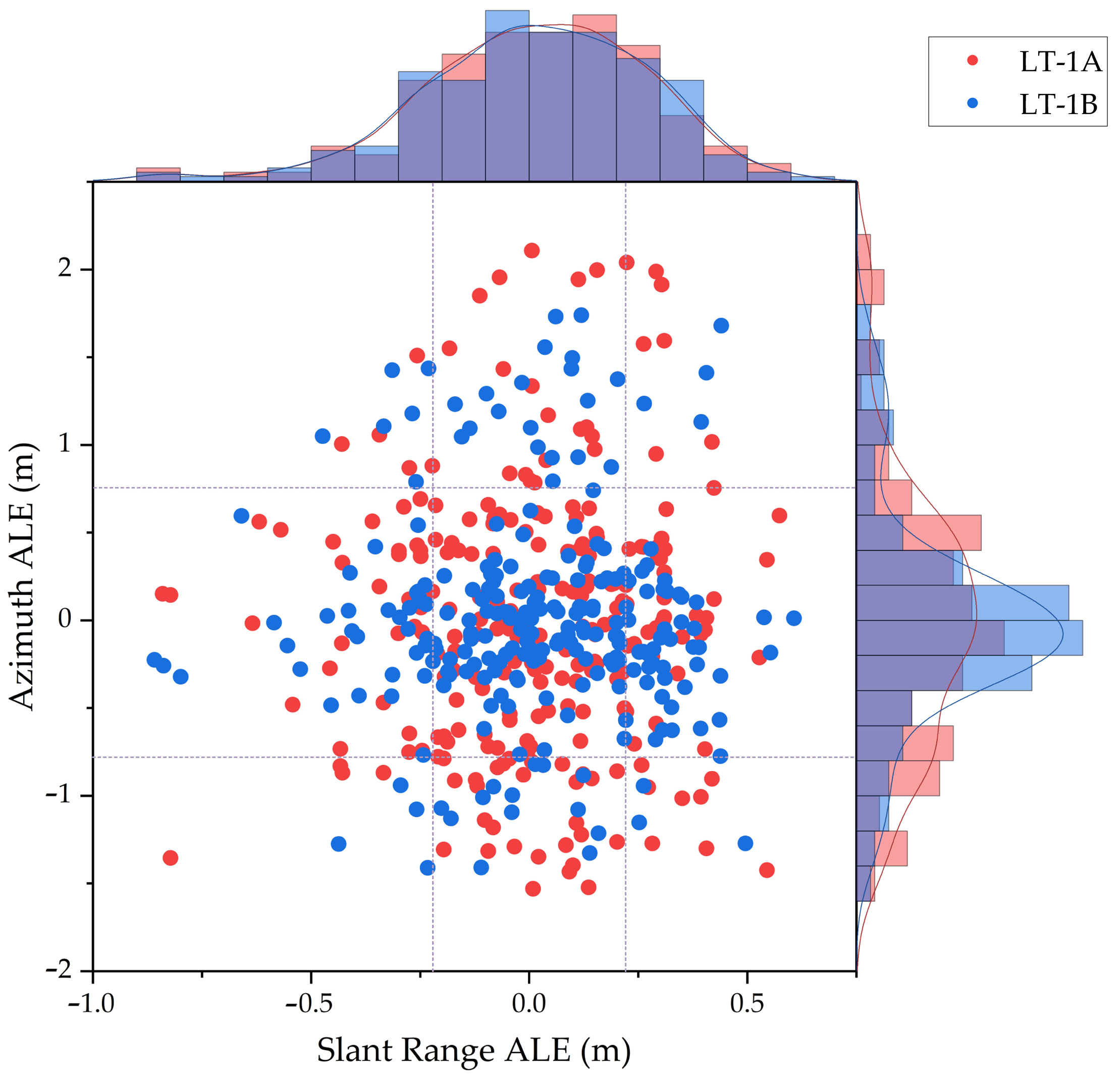
3.3.3. Absolute Location Error Derivation
4. Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Moreira, A.; Prats-Iraola, P.; Younis, M.; Krieger, G.; Hajnsek, I.; Papathanassiou, K.P. A tutorial on synthetic aperture radar. IEEE Geosci. Remote Sens. Mag. 2013, 1, 6–43. [Google Scholar] [CrossRef]
- Zhang, G.; Zhao, R.; Li, S.; Deng, M.; Guo, F.; Xu, K.; Wang, T.; Jia, P.; Hao, X. Stability analysis of geometric geolocation accuracy of YG-13 satellite. IEEE Trans. Geosci. Remote Sens. 2020, 60, 1–12. [Google Scholar] [CrossRef]
- Feng, Y.; Lei, Z.; Tong, X.; Xi, M.; Li, P. An Improved Geometric Calibration Model for Spaceborne Sar Systems with a Case Study of Large-Scale Gaofen-3 Images. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2022, 15, 6928–6942. [Google Scholar] [CrossRef]
- Curlander, J.C. Location of spaceborne SAR imagery. IEEE Trans. Geosci. Remote Sens. 1982, GE-20, 359–364. [Google Scholar] [CrossRef]
- Wivell, C.; Steinwand, D.; Kelly, G.; Meyer, D. Evaluation of terrain models for the geocoding and terrain correction, of synthetic aperture radar (SAR) image. IEEE Trans. Geosci. Remote Sens. 2020, 30, 1137–1144. [Google Scholar] [CrossRef]
- Schubert, A.; Jehle, M.; Small, D.; Meier, E. Influence of Atmospheric Path Delay on the Absolute Geolocation Accuracy of TerraSAR-X High-Resolution Products. IEEE Trans. Geosci. Remote Sens. 2009, 48, 751–758. [Google Scholar] [CrossRef]
- Small, D.; Rosich, B.; Schubert, A.; Meier, E.; Nüesch, D. Geometric validation of low and high-resolution ASAR imagery. In Proceedings of the 2004 Envisat and ERS Symposium, ESA SP-572, Salzburg, Austria, 6–10 September 2004. [Google Scholar]
- Schubert, A.; Small, D.; Miranda, N.; Geudtner, D.; Meier, E. Sentinel-1A Product Geolocation Accuracy: Commissioning Phase Results. Remote Sens. 2015, 7, 9431–9449. [Google Scholar] [CrossRef]
- Gisinger, C.; Schubert, A.; Breit, H.; Garthwaite, M.; Balss, U.; Willberg, M.; Small, D.; Eineder, M.; Miranda, N. In-depth verification of Sentinel-1 and TerraSAR-X geolocation accuracy using the Australian corner reflector array. IEEE Trans. Geosci. Remote Sens. 2021, 59, 1154–1181. [Google Scholar] [CrossRef]
- Mohr, J.J.; Madsen, S.N. Geometric calibration of ERS satellite SAR images. IEEE Trans. Geosci. Remote Sens. 2001, 39, 842–850. [Google Scholar] [CrossRef]
- Zandbergen, R.; Dow, J.; Merino, M.R.; Píriz, R.; Fadrique, F.M. ERS-1 and ERS-2 tandem mission: Orbit determination, prediction and maintenance. Adv. Space Res. 1997, 19, 1649–1653. [Google Scholar] [CrossRef]
- Brautigam, B.; Schwerdt, M.; Bachmann, M.; Doring, B. Results from geometric and radiometric calibration of TerraSAR-X. In Proceedings of the 2007 European Radar Conference, EUSAR 2007, Munich, Germany, 17 December 2007; pp. 87–90. [Google Scholar]
- Schwerdt, M.; Brautigam, B.; Bachmann, M.; Doring, B.; Schrank, D.; Gonzalez, J.H. Final results of the efficient TerraSAR-X calibration method. In Proceedings of the 2008 IEEE Radar Conference, Rome, Italy, 26–30 May 2008; pp. 1–6. [Google Scholar]
- Shimada, M.; Isoguchi, O.; Tadono, T.; Isono, K. PALSAR radiometric and geometric calibration. IEEE Trans. Geosci. Remote Sens. 2009, 47, 3915–3932. [Google Scholar] [CrossRef]
- Motohka, T.; Isoguchi, O.; Sakashita, M.; Shimada, M. Results of ALOS-2 PALSAR-2 Calibration and Validation After 3 Years of Operation. In Proceedings of the 2018 IEEE International Geoscience and Remote Sensing Symposium, IGARSS 2018, Valencia, Spain, 22–27 July 2018; pp. 4169–4170. [Google Scholar]
- Schubert, A.; Miranda, N.; Geudtner, D.; Small, D. Sentinel-1A/B Combined Product Geolocation Accuracy. Remote Sens. 2017, 9, 607. [Google Scholar] [CrossRef]
- Williams, D.; LeDantec, P.; Chabot, M.; Hillman, A.; James, K.; Caves, R.; Thompson, A.; Vigneron, C.; Wu, Y. RADARSAT-2 image quality and calibration update. In Proceedings of the 10th European Conference on Synthetic Aperture Radar, 2014 EUSAR, Berlin, Germany, 3–5 June 2014; pp. 1–4. [Google Scholar]
- Zhao, R.; Zhang, G.; Deng, M.; Xu, K.; Guo, F. Geometric Calibration and Accuracy Verification of the GF-3 Satellite. Sensors 2017, 17, 1977–1989. [Google Scholar] [CrossRef] [PubMed]
- Walterscheid, I.; Ender, J.; Brenner, A.; Loffeld, O. Bistatic SAR processing and experiments. IEEE Trans. Geosci. Remote Sens. 2006, 44, 2710–2717. [Google Scholar] [CrossRef]
- Wang, R.; Deng, Y. Bistatic SAR System and Signal Processing Technology; Springer: Singapore, 2018. [Google Scholar]
- Mou, J.; Wang, Y.; Hong, J.; Wang, Y.; Wang, A. Baseline Calibration of L-Band Spaceborne Bistatic SAR TwinSAR-L for DEM Generation. Remote Sens. 2023, 15, 3024. [Google Scholar] [CrossRef]
- Jin, G.; Liu, K.; Liu, D.; Liang, D.; Zhang, H.; Ou, N.; Zhang, Y.; Deng, Y.; Li, C.; Wang, R. An advanced phase synchronization scheme for LT-1. IEEE Trans. Geosci. Remote Sens. 2020, 58, 1735–1746. [Google Scholar] [CrossRef]
- Liang, D.; Liu, K.; Yue, H.; Chen, Y.; Deng, Y.; Zhang, H.; Li, C.; Jin, G.; Wang, R. An advanced non-interrupted synchronization scheme for bistatic synthetic aperture radar. In Proceedings of the 2019 IEEE International Geoscience and Remote Sensing Symposium, IGARSS 2019, Yokohama, Japan, 28 July–2 August 2019; pp. 1116–1119. [Google Scholar]
- Zhang, Y.; Zhang, H.; Ou, N.; Liu, K.; Liang, D.; Deng, Y.; Wang, R. First demonstration of multipath effects on phase synchronization scheme for LT-1. IEEE Trans. Geosci. Remote Sens. 2019, 58, 2590–2604. [Google Scholar] [CrossRef]
- Xie, H.; Zhan, Y.; Zeng, G.; Pan, X. LEO mega-constellations for 6G global coverage: Challenges and opportunities. IEEE Access 2021, 9, 164223–164244. [Google Scholar] [CrossRef]
- Zink, M.; Bachmann, M.; Brautigam, B.; Fritz, T.; Hajnsek, I.; Moreira, A.; Wessel, B.; Krieger, G. TanDEM-X: The new global DEM takes shape. IEEE Geosci. Remote Sens. Mag. 2014, 2, 8–23. [Google Scholar] [CrossRef]
- Rossi, C.; Gonzalez, F.R.; Fritz, T.; Yague-Martinez, N.; Eineder, M. TanDEM-X calibrated raw DEM generation. ISPRS J. Photogramm. Remote Sens. 2012, 73, 12–20. [Google Scholar] [CrossRef]
- Krieger, G.; Moreira, A.; Fiedler, H.; Hajnsek, I.; Werner, M.; Younis, M.; Zink, M. TanDEM-X: A satellite formation for high-resolution SAR interferometry. IEEE Trans. Geosci. Remote Sens. 2007, 45, 3317–3341. [Google Scholar] [CrossRef]
- Scipal, K.; Davidson, M. The SAOCOM-CS mission: ESA’s first bistatic and tomographic L-band mission. In Proceedings of the 2017 IEEE International Geoscience and Remote Sensing Symposium. IGARSS 2017, Fort Worth, TX, USA, 23–28 July 2017; pp. 123–124. [Google Scholar]
- González, J.H.; Antony, J.M.W.; Bachmann, M.; Krieger, G.; Zink, M.; Schrank, D.; Schwerdt, M. Bistatic system and baseline calibration in TanDEM-X to ensure the global digital elevation model quality. ISPRS J. Photogramm. Remote Sens. 2012, 73, 3–11. [Google Scholar] [CrossRef]
- Fioretti, L.; Giudici, D.; Guccione, P.; Recchia, A.; Steinisch, M. SAOCOM-1B Independent Commissioning Phase Results. In Proceedings of the 2021 IEEE International Geoscience and Remote Sensing Symposium. IGARSS 2021, Brussels, Belgium, 11–16 July 2021; pp. 1757–1760. [Google Scholar]
- Ding, C.; Liu, J.; Lei, B.; Qiu, X. Preliminary exploration of systematic geolocation accuracy of GF-3 SAR satellite system. J. Radars 2017, 6, 11–16. [Google Scholar]
- Antony, J.M.W.; Gonzalez, J.H.; Schwerdt, M.; Bachmann, M.; Krieger, G.; Zink, M. Results of the TanDEM-X Baseline Calibration. IEEE J. Sel. Top. Appl. Earth Obs. Remote. Sens. 2013, 6, 1495–1501. [Google Scholar] [CrossRef]
- Mendes, V.B.; Langley, R.B. Tropospheric zenith delay prediction accuracy for airborne GPS high-precision geolocation. In Proceedings of the Institute of Navigation 54th Annual Meeting, Denver, CO, USA, 1–3 June 1998; pp. 337–347. [Google Scholar]
- Yu, C.; Li, Z.; Penna, N.T.; Crippa, P. Generic atmospheric correction model for interferometric synthetic aperture radar observations. J. Geophys. Res. Solid Earth 2018, 123, 9202–9222. [Google Scholar] [CrossRef]
- Yu, C.; Li, Z.; Penna, N.T. Interferometric synthetic aperture radar atmospheric correction using a GPS-based iterative tropospheric decomposition model. Remote Sens. Environ. 2018, 204, 109–121. [Google Scholar] [CrossRef]
- Yu, C.; Penna, N.T.; Li, Z. Generation of rea-time mode high-resolution water vapor fields from GPS observations. J. Geophys. Res. Atmos. 2017, 122, 2008–2025. [Google Scholar] [CrossRef]
- Berrada Baby, H.; Gole, P.; Lavergnat, J. A model for the tropospheric excess path length of radio waves from surface meteorological measurements. Radio Sci. 1988, 23, 1023–1038. [Google Scholar] [CrossRef]
- Jehle, M.; Perler, D.; Small, D.; Schubert, A.; Meier, E. Estimation of atmospheric path delays in TerraSAR-X data using models vs. measurements. Sensors 2008, 8, 8479–8491. [Google Scholar] [CrossRef]
- Zhang, G.; Fei, W.-B.; Li, Z.; Zhu, X.; Li, D.-R. Evaluation of the RPC model for spaceborne SAR imagery. Photogramm. Eng. Remote Sens. 2010, 76, 727–733. [Google Scholar] [CrossRef]
- Zhang, L.; Balz, T.; Liao, M. Satellite SAR geocoding with refined RPC model. ISPRS J. Photogramm. Remote Sens. 2012, 69, 37–49. [Google Scholar] [CrossRef]
- Qi, Y.; Wang, Y.; Hong, J.; Du, S. Additional Reference Height Error Analysis for Baseline Calibration Based on a Distributed Target DEM in TwinSAR-L. Remote Sens. 2021, 13, 2750. [Google Scholar] [CrossRef]
- Schubert, A.; Small, D.; Gisinger, C.; Balss, U.; Eineder, M. Corner Reflector Deployment for SAR Geometric Calibration and Performance Assessment. ESRIN: Frascati 2018, 1.03, 14–17. [Google Scholar]
- Azcueta, M.; Gonzalez, J.P.C.; Zajc, T.; Ferreyra, J.; Thibeault, M. External Calibration Results of the SAOCOM-1A Commissioning Phase. IEEE Trans. Geosci. Remote Sens. 2022, 60, 1–8. [Google Scholar] [CrossRef]
- Anconitano, G.; Acuña, M.A.; Guerriero, L.; Pierdicca, N. Analysis of Multi-Frequency SAR Data for Evaluating Their Sensitivity to Soil Moisture Over an Agricultural Area in Argentina. In Proceedings of the 2022 IEEE International Geoscience and Remote Sensing Symposium, 2022 IGARSS, Kuala Lumpur, Malaysia, 17–22 July 2022; pp. 5716–5719. [Google Scholar]
- Lu, R.; Wen, J.; Zhao, D.; Liu, Y.; Hou, Y.; Chen, C. Analysis of Influencing Factors of Distributed Satellite InSAR Height-Measurement Accuracy based on Positioning Equation. In Proceedings of the 2022 3rd China International SAR Symposium (CISS), Shanghai, China, 2–4 November 2022; pp. 1–8. [Google Scholar]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Date | 7 July 2022 | 14 July 2022 | 22 July 2022 | 30 July 2022 | 7 August 2022 |
| Test site A | 26,747 | 28,313 | 28,891 | 29,607 | 30,279 |
| Test site B | 26,752 | 28,311 | 28,890 | 29,606 | 30,278 |
| Date | 23 August 2022 | 31 August 2022 | 8 September 2022 | 16 September 2022 | 18 October 2022 |
| Test site A | 32,572 | 33,616 | 34,696 | 36,066 | 42,603 |
| Test site B | 32,570 | 31,618 | 34,695 | 36,065 | 42,601 |
| Date | 26 October 2022 | 3 November 2022 | 11 November 2022 | 19 November 2022 | 27 November 2022 |
| Test site A | 44,735 | 46,504 | 48,117 | 49,960 | 51,498 |
| Test site B | 44,740 | 46,503 | 48,122 | 49,959 | 51,501 |
| Test Site A | Test Site B | |||
|---|---|---|---|---|
| Master | Slave | Master | Slave | |
| SceneID | 34,696 | 34,696 | 34,695 | 34,695 |
| OrbitID | 3365 | 2887 | 3365 | 2887 |
| Incidence Angle | 44.496° | 44.365° | 22.440° | 22.342° |
| Azimuth Spacing | 1.995 m | 1.995 m | 1.769 m | 1.769 m |
| Range Spacing | 1.665 m | 1.665 m | 1.665 m | 1.665 m |
| Dimension | 27,280 × 22,914 | 27,320 × 22,914 | 37,692 × 12,674 | 37,756 × 12,674 |
| LT-1A | LT-1B | ||||||||
|---|---|---|---|---|---|---|---|---|---|
| Slant Range | Azimuth | Slant Range | Azimuth | ||||||
| 34,696 | 34,695 | 34,696 | 34,695 | 34,696 | 34,695 | 34,696 | 34,695 | ||
| Time error | Mean | 198.337 ns | 196.876 ns | 2.056 ms | 2.061 ms | 198.864 ns | 197.149 ns | −0.242 ms | −0.075 ms |
| STD | 1.574 ns | 1.587 ns | 0.137 ms | 0.032 ms | 1.881 ns | 1.254 ns | 0.112 ms | 0.026 ms | |
| Total | 197.610 ± 2.161 ns | 2.058 ± 0.096 ms | 198.010 ± 1.975 ns | −0.159 ± 0.085 ms | |||||
| ALE | Mean | 29.730 m | 29.511 m | −15.711 m | −15.742 m | 29.809 m | 29.552 m | −15.504 m | −16.113 m |
| STD | 0.236 m | 0.238 m | 1.054 m | 0.249 m | 0.282 m | 0.188 m | 0.542 m | 0.233 m | |
| Total | 29.621 ± 0.324 m | −15.726 ± 0.740 m | 29.681 ± 0.296 m | −1.208 ± 0.512 m | |||||
| Satellite | ALOS-1 | ALOS-2 | SAOCOM-1A | SAOCOM-1B | LT-1 |
|---|---|---|---|---|---|
| Range resolution | 4.5 m | 6 m | 12 m | 12 m | 1.7 m |
| Azimuth resolution | 8.9 m | 6 m | 6 m | 6 m | 2 m |
| SNR | 8 dB | Not mentioned | Not mentioned | Not mentioned | 20 dB |
| Ideal range accuracy | 0.69 m | 0.34 m | 0.46 m | 0.46 m | 0.06 m |
| Ideal azimuth accuracy | 1.38 m | 0.34 m | 0.23 m | 0.23 m | 0.07 m |
| Ideal ALE | 1.54 m | 0.48 m | 0.51 m | 0.51 m | 0.09 m |
| Actual ALE | 9.7 m | 10 m | 0.8 m × 6.4 m | 3.3 m × 6.6 m | 0.76 m × 0.23 m |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mou, J.; Wang, Y.; Hong, J.; Wang, Y.; Wang, A.; Sun, S.; Liu, G. First Assessment of Bistatic Geometric Calibration and Geolocation Accuracy of Innovative Spaceborne Synthetic Aperture Radar LuTan-1. Remote Sens. 2023, 15, 5280. https://doi.org/10.3390/rs15225280
Mou J, Wang Y, Hong J, Wang Y, Wang A, Sun S, Liu G. First Assessment of Bistatic Geometric Calibration and Geolocation Accuracy of Innovative Spaceborne Synthetic Aperture Radar LuTan-1. Remote Sensing. 2023; 15(22):5280. https://doi.org/10.3390/rs15225280
Chicago/Turabian StyleMou, Jingwen, Yu Wang, Jun Hong, Yachao Wang, Aichun Wang, Shiyu Sun, and Guikun Liu. 2023. "First Assessment of Bistatic Geometric Calibration and Geolocation Accuracy of Innovative Spaceborne Synthetic Aperture Radar LuTan-1" Remote Sensing 15, no. 22: 5280. https://doi.org/10.3390/rs15225280
APA StyleMou, J., Wang, Y., Hong, J., Wang, Y., Wang, A., Sun, S., & Liu, G. (2023). First Assessment of Bistatic Geometric Calibration and Geolocation Accuracy of Innovative Spaceborne Synthetic Aperture Radar LuTan-1. Remote Sensing, 15(22), 5280. https://doi.org/10.3390/rs15225280