
CryoSat Long-Term Ocean Data Analysis and Validation: Final Words on GOP Baseline-C


Abstract
:1. Introduction
2. Data and Methods
2.1. Data, Handling, and Conversion
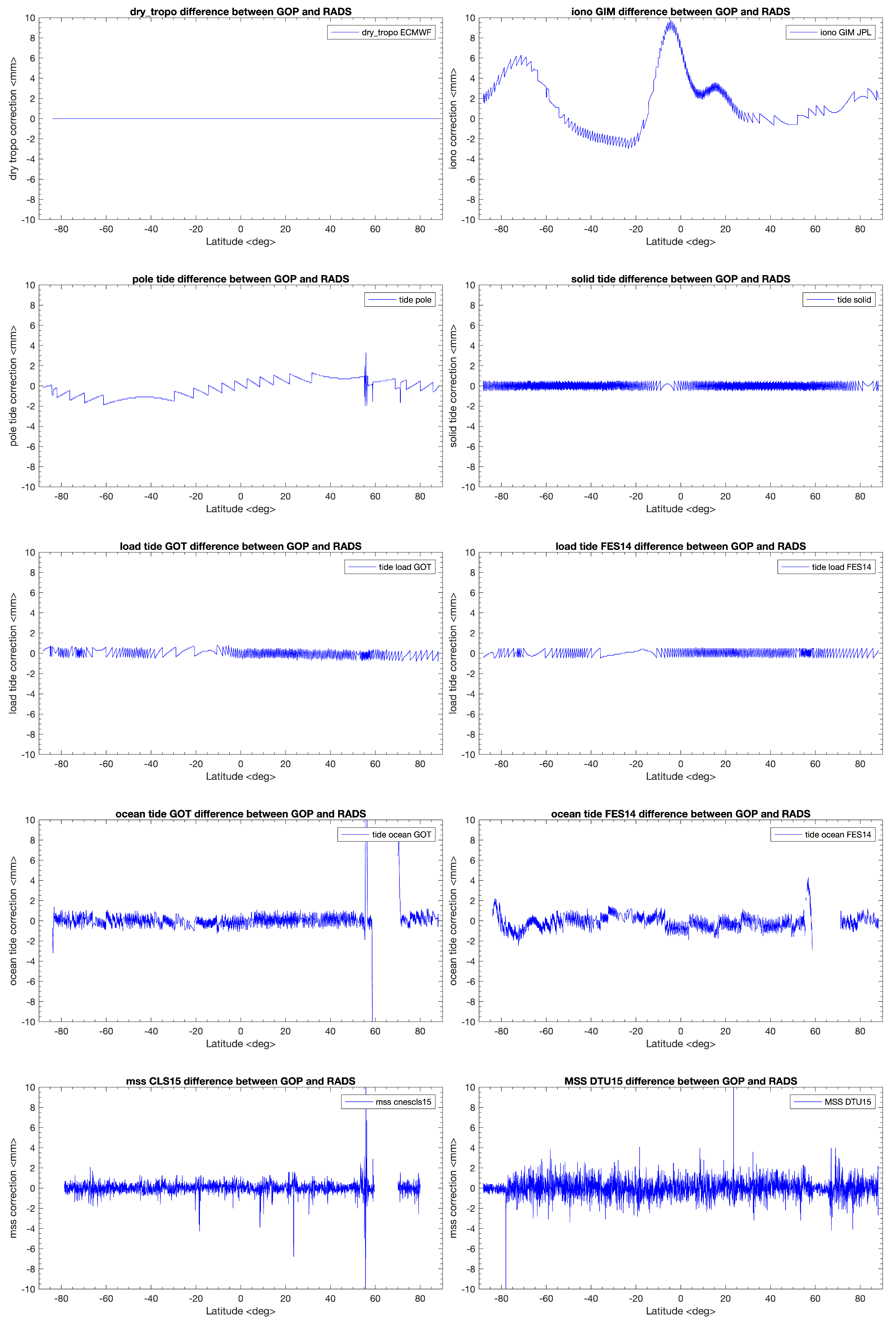
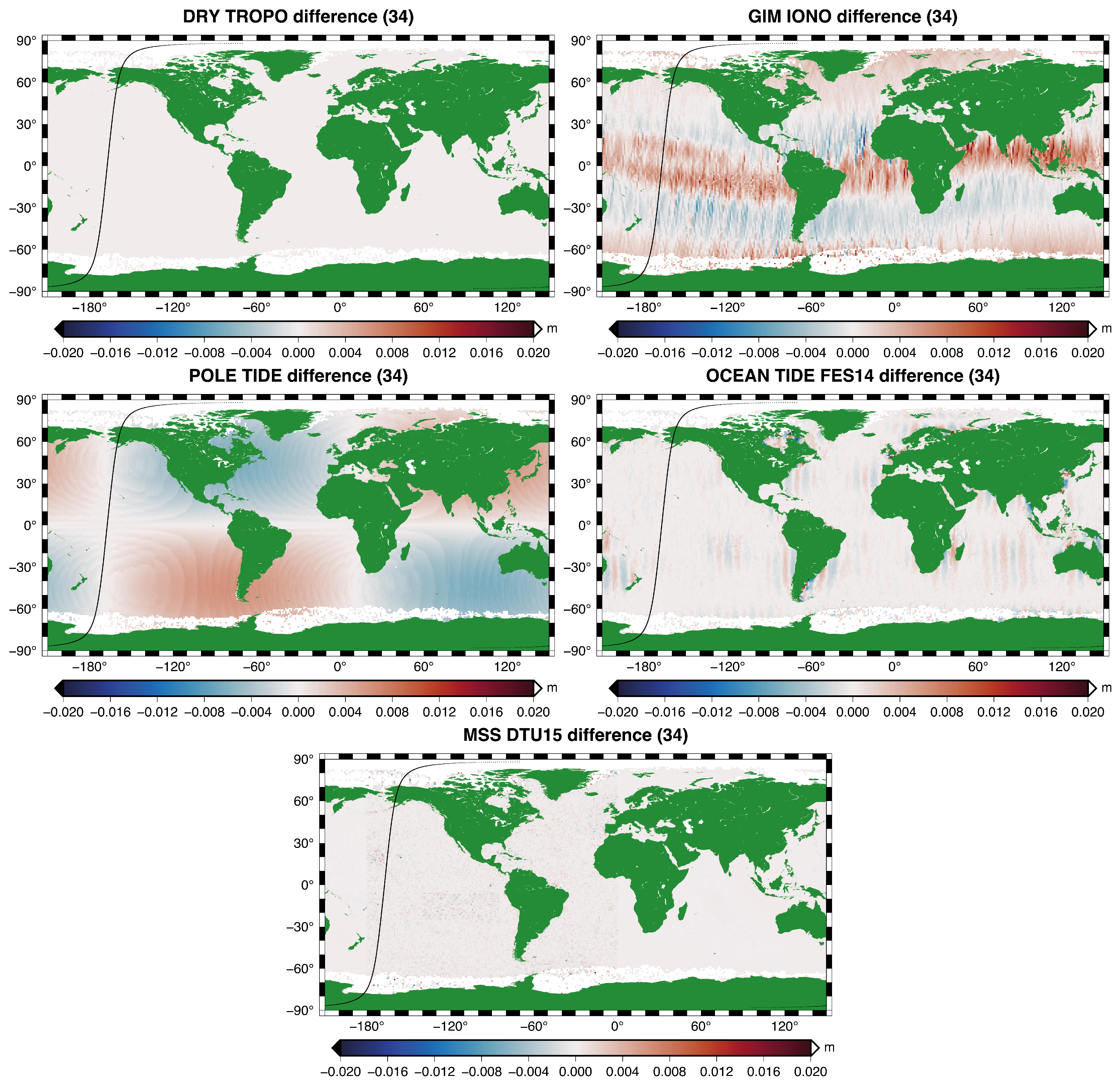
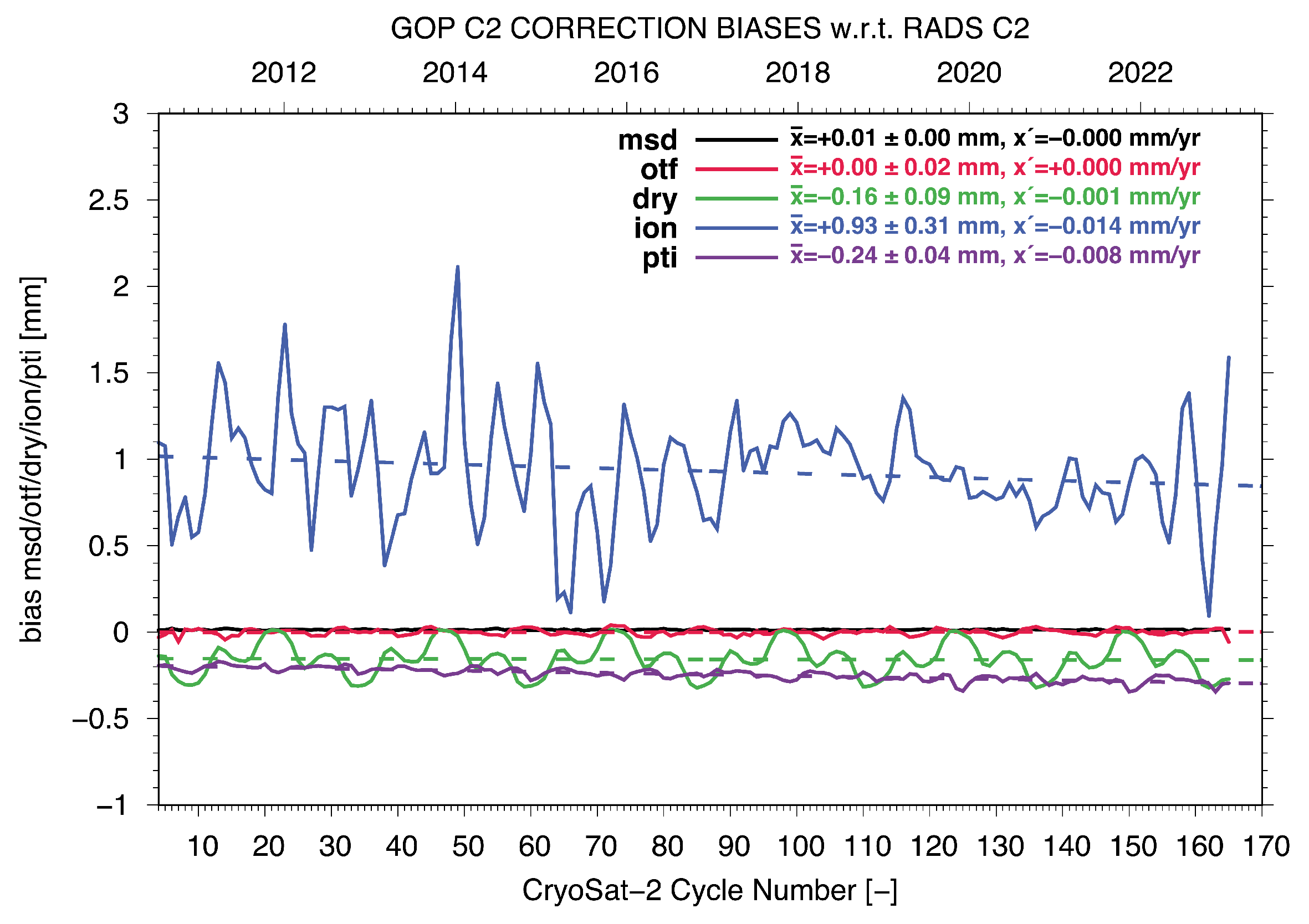
2.2. Analyzing the Corrections Needed for Sea Level Anomaly
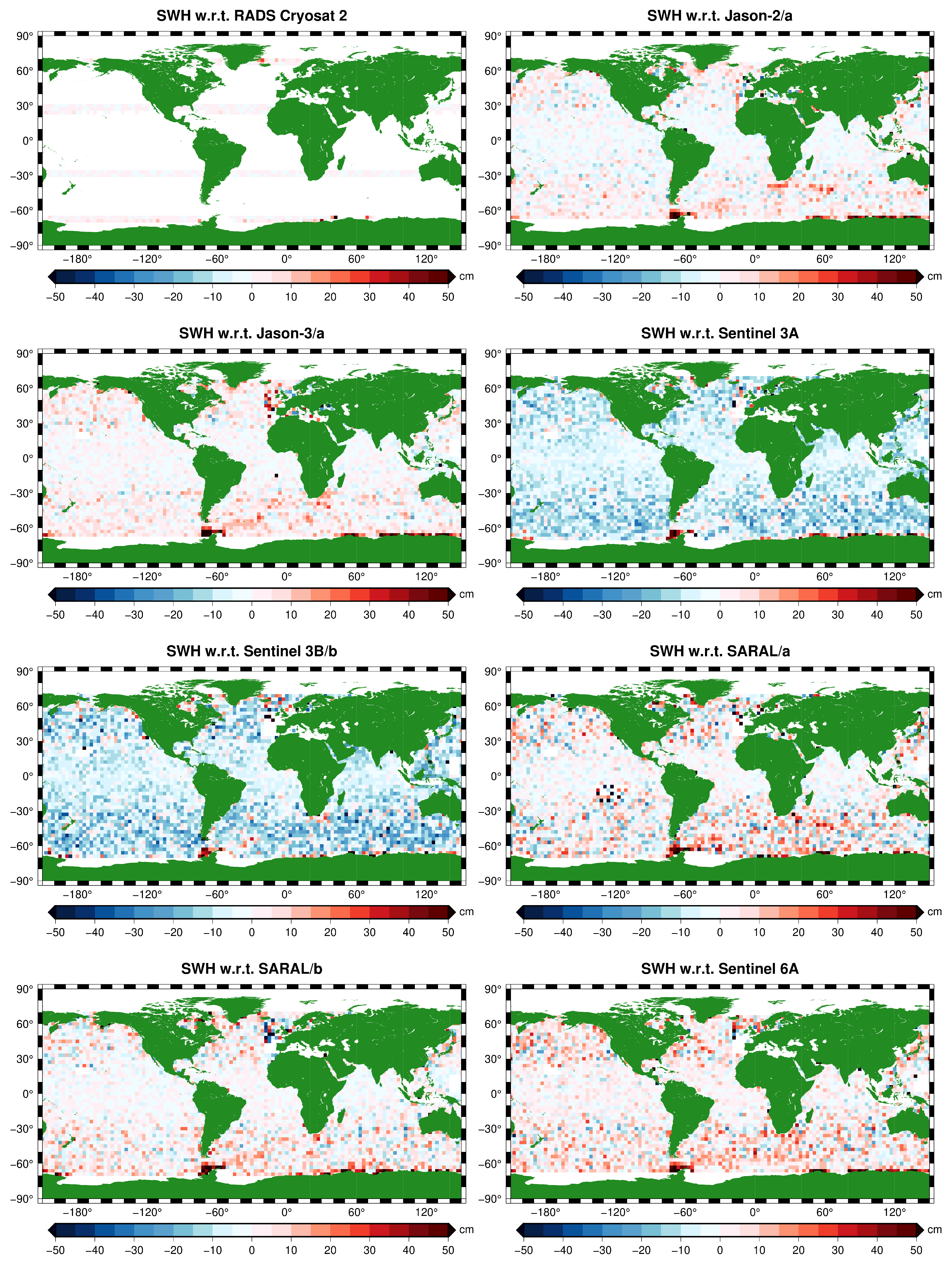
2.3. CryoSat-2 Comparison with Concurrent Altimeter Missions through Crossover Analysis
2.4. CryoSat-2 Comparison with Tide Gauges through Interpolation
2.5. Final Words on Using GOP Baseline-C and Follow-Ons
3. Results
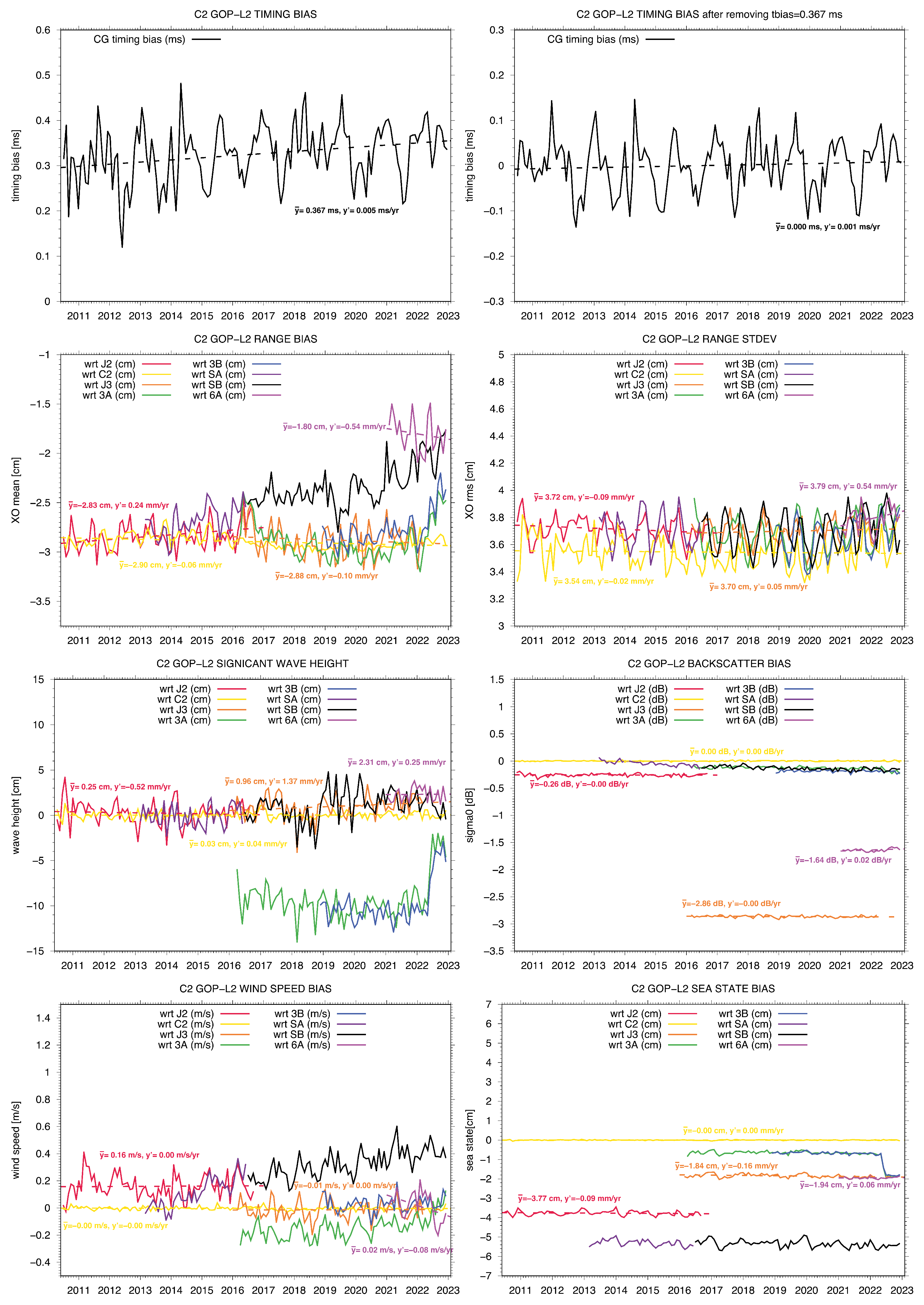
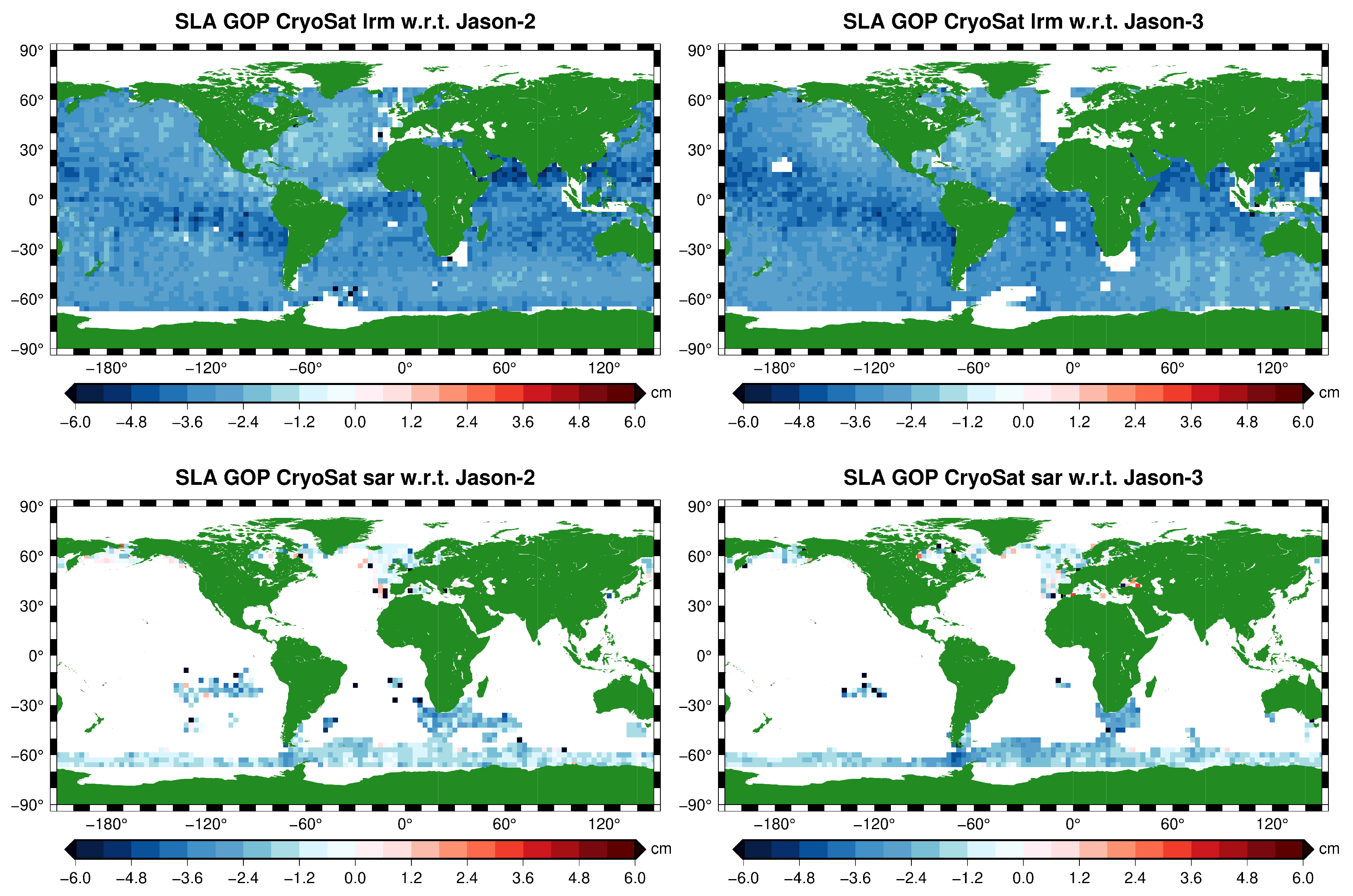
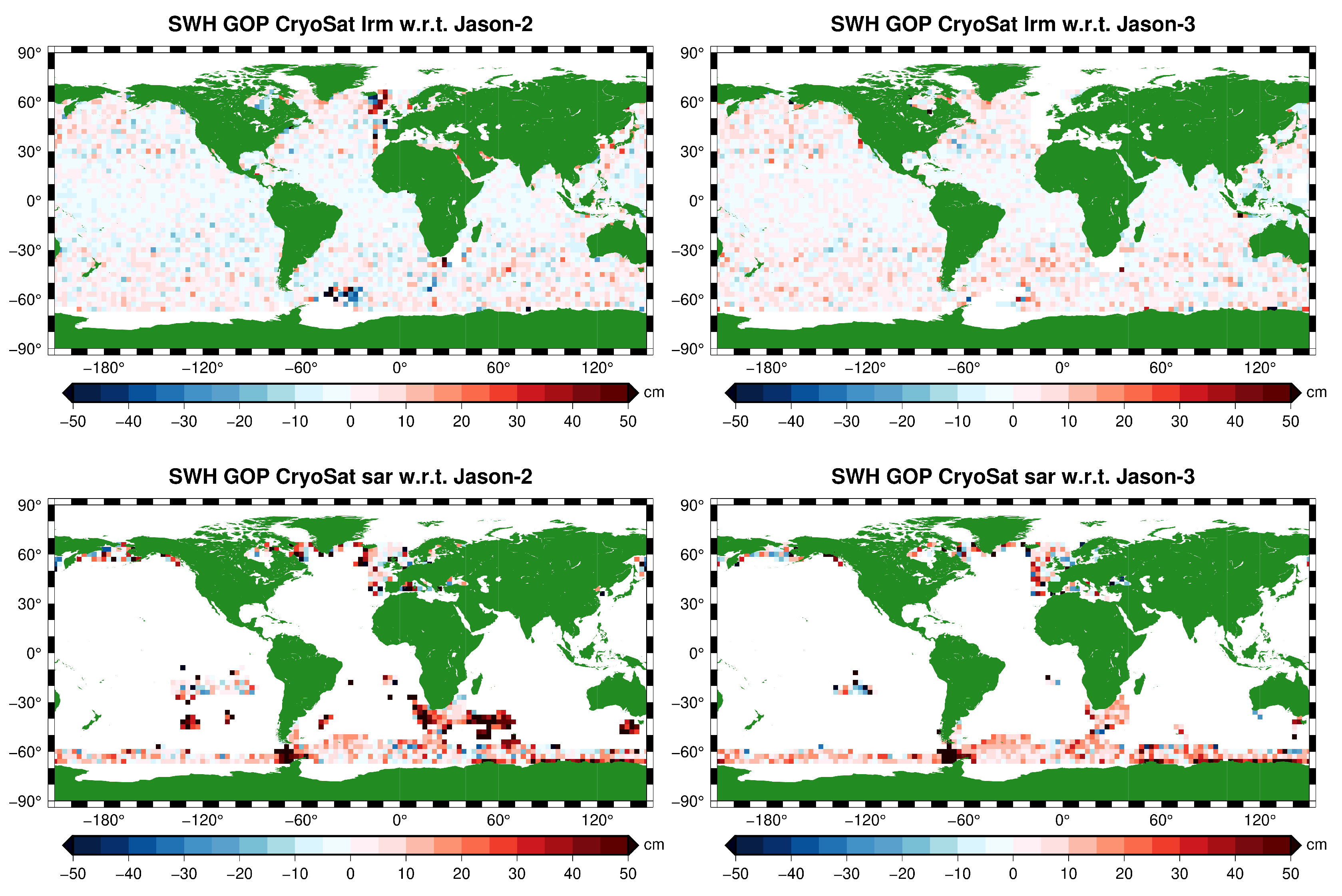
3.1. Cryosat-2 vs. Concurrent Altimetry
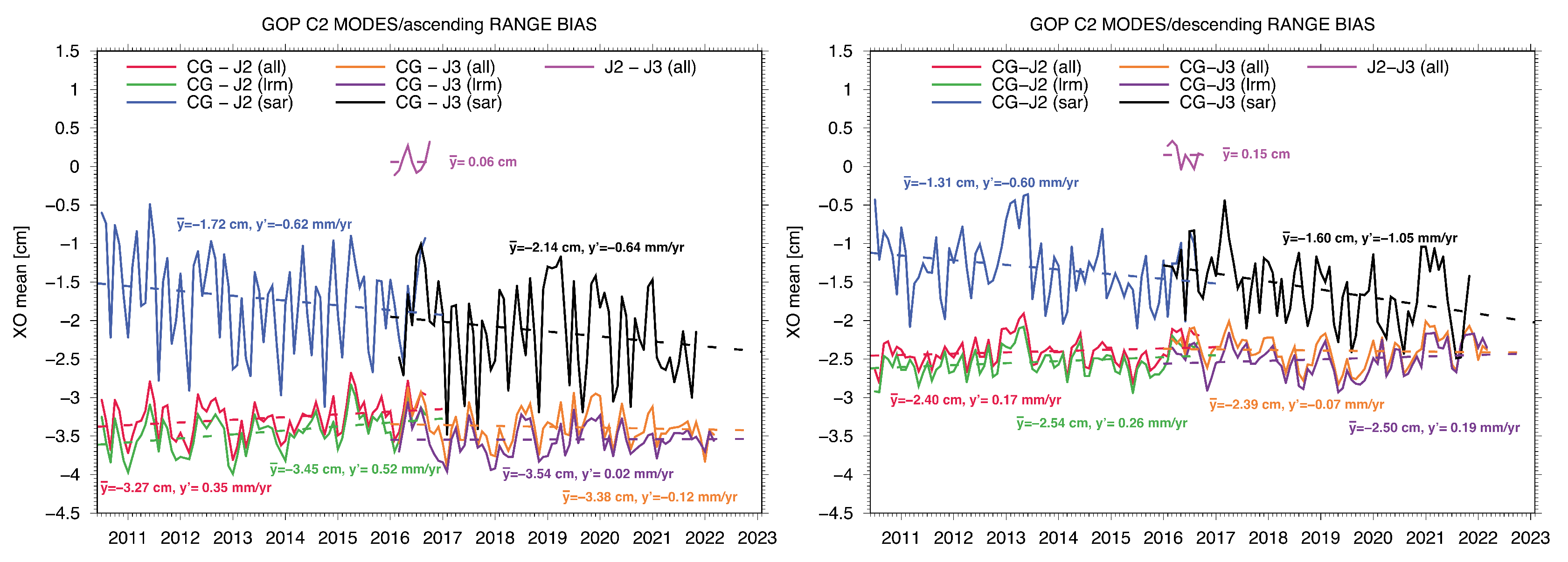
3.2. CryoSat Modes and Descending/Ascending Pass Bias
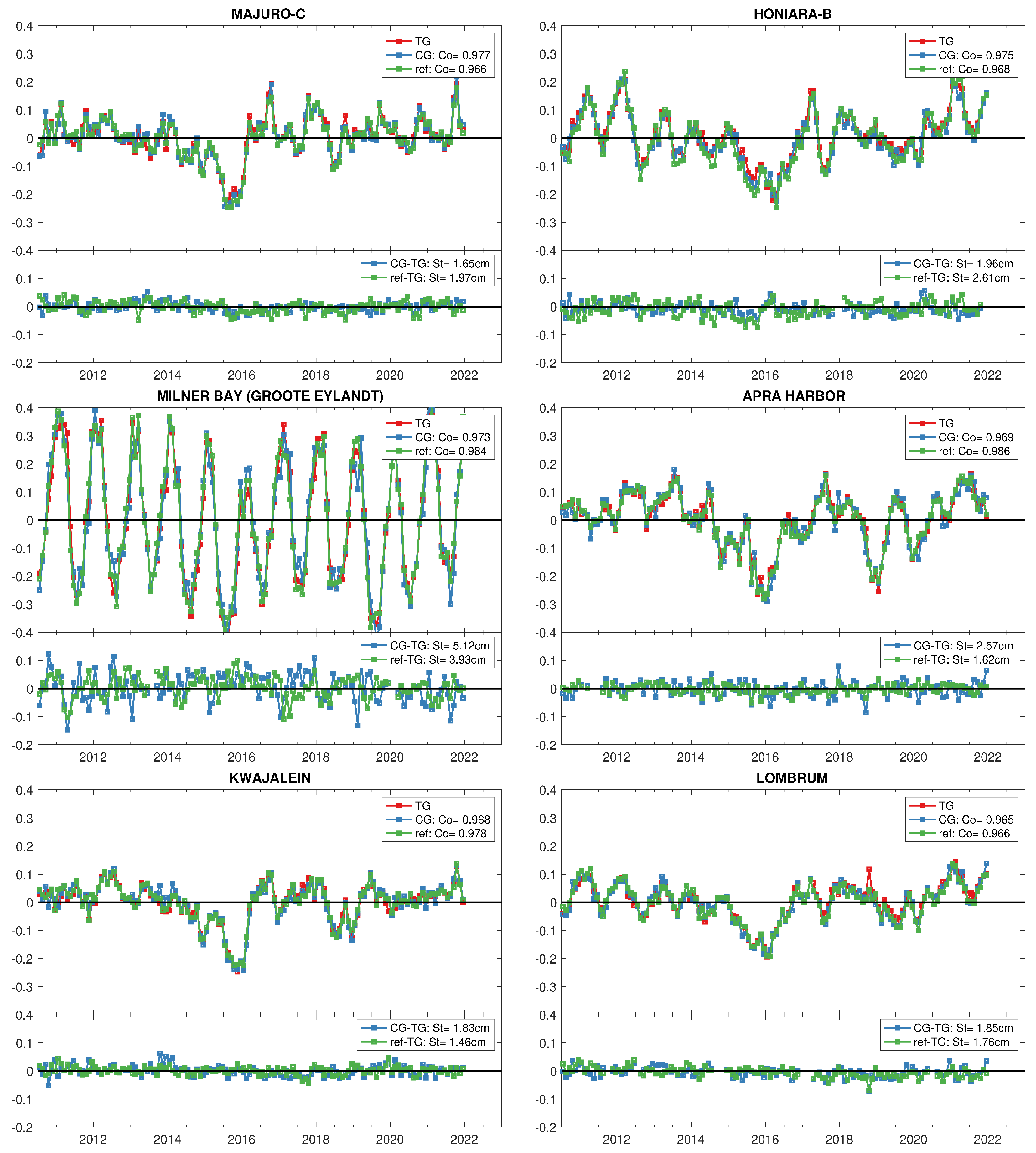
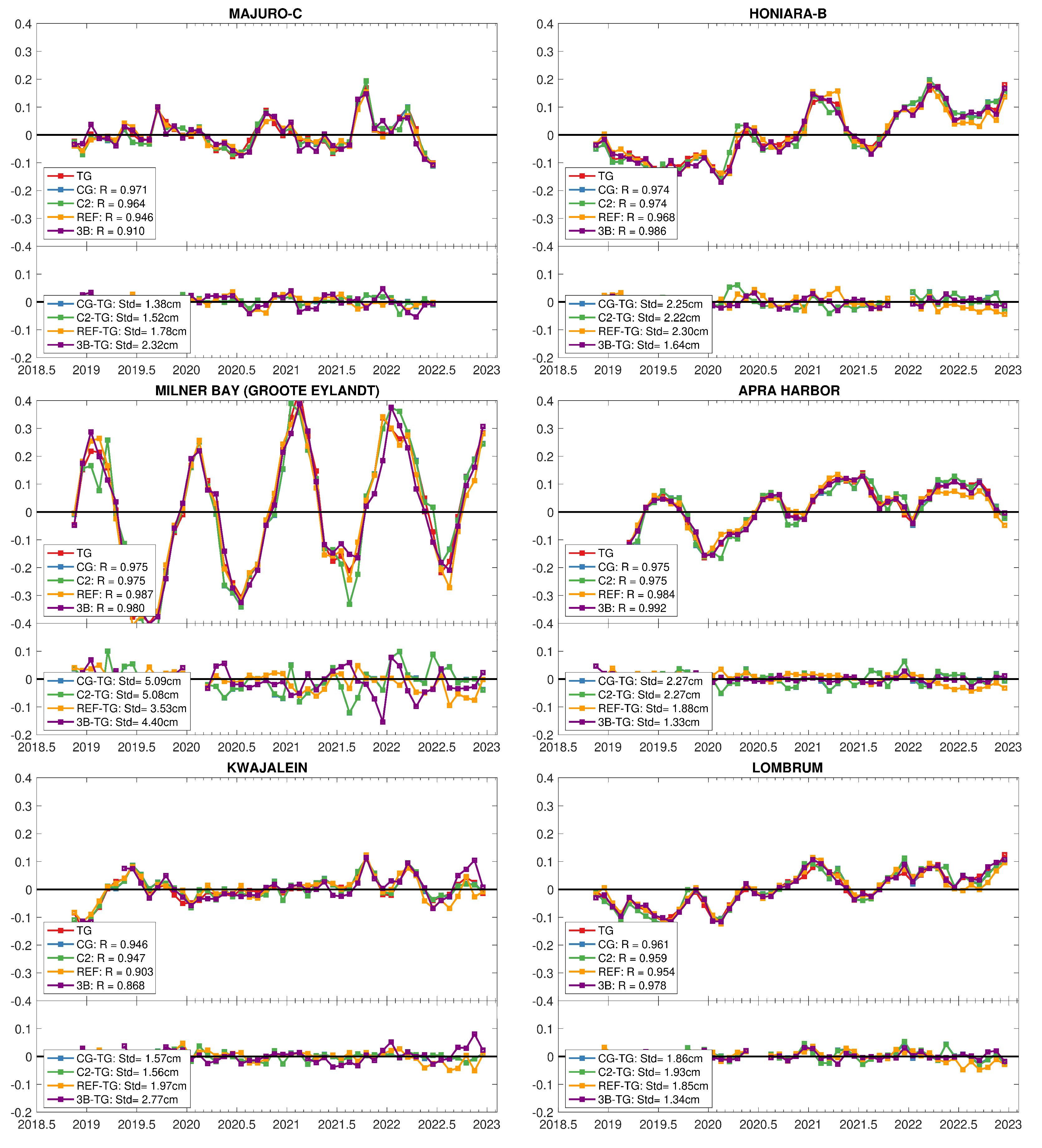
3.3. Cryosat-2 vs. Tide Gauges
3.3.1. Drift after 2022
4. Discussion and Conclusions
Supplementary Materials
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| CCI | Climate Change Initiative |
| CG | CryoSat-2 GOP |
| CLS | Collecte Localisation Satellites |
| CNES | Centre National d’Études Spatiales |
| COP | CryoSat Ocean Processor |
| CRISTAL | Copernicus polaR Ice and Snow Topography ALTimeter |
| DAC | Dynamic Atmospheric Correction |
| DORIS | Doppler Orbitography and Radiopositioning Integrated by Satellite |
| ECMWF | European Centre for Medium-Range Weather Forecasts |
| ECV | Essential Climate Variable |
| EUMETSAT | EUropean organisation for the exploitation of METeorological SATellites |
| ESA | European Space Agency |
| FES2014 | Finite Element Solution 2014 version |
| GDR | Geophysical Data Records aka POD standard |
| GIA | Glacial Isostatic Adjustment |
| GIM | Global Ionospheric Map |
| GMT | Generic Mapping Tools |
| GNSS | Global Navigation Satellite System |
| GOP | Geophysical Ocean Products |
| GOT410 | Goddard Ocean Tide 4.10 version |
| IDS | International DORIS Service |
| ILRS | International Laser Ranging Service |
| IPF | Instrument Processing Facilities |
| JPL | Jet Propulsion Laboratory (NASA) |
| LASER | Light Amplification by Stimulated Emission of Radiation |
| LRM | Low-Resolution Mode |
| LTA | Long-Term Archive) |
| MSL | Mean Sea Level |
| NetCDF | Network Common Data Form |
| NOAA | National Oceanographic and Atmospheric Administration |
| NOC | National Oceanography Centre, Southampton, UK |
| OFFL | Offline Systematic Processing |
| PDS | Processing and Dissemination Service |
| POD | Precise Orbit Determination |
| PSMSL | Permanent Service for Mean Sea Level |
| RADS | Radar Altimeter Database System |
| REF | Altimeter REFerence missions |
| RLR | Revised Local Reference |
| SALP | Service d’Altimetrie et Localisation Precise |
| SAR | Synthetic Aperture Radar |
| SARAL | Satellite with ARgos and ALtiKa |
| SIN | SAR INterferometric aka SARIn |
| SIRAL | SAR Interferometric Radar Altimeter |
| SLA | Sea Level Anomaly |
| SLR | Satellite LASER Ranging |
| SSB | Sea State Bias |
| SWH | Significant Wave Height |
| TEC | Total Electron Content |
| TG | Tide Gauge |
| WIND | Wind speed |
| XO | Crossover |
References
- Dibarboure, G.; Renaudie, C.; Pujol, M.; Labroue, S.; Picot, N. A demonstration of the potential of CryoSat-2 to contribute to mesoscale observation. Adv. Space Res. 2012, 50, 1046–1061. [Google Scholar] [CrossRef]
- Labroue, S.; Boy, F.; Picot, N.; Urvoy, M.; Ablain, M. First quality assessment of the CryoSat-2 altimetric system over ocean. Adv. Space Res. 2012, 50, 1030–1045. [Google Scholar] [CrossRef]
- Calafat, F.; Cipollini, P.; Bouffard, J.; Snaith, H.; Féménias, P. Evaluation of new CryoSat-2 products over the ocean. Remote Sens. Environ. 2017, 191, 131–144. [Google Scholar] [CrossRef]
- Bouffard, J.; Naeije, M.; Banks, C.J.; Calafat, F.M.; Cipollini, P.; Snaith, H.M.; Webb, E.; Hall, A.; Mannan, R.; Féménias, P.; et al. CryoSat ocean product quality status and future evolution. Adv. Space Res. 2018, 62, 1549–1563. [Google Scholar] [CrossRef]
- Fenoglio, L.; Dinardo, S.; Uebbing, B.; Buchhaupt, C.; Gärtner, M.; Staneva, J.; Becker, M.; Klos, A.; Kusche, J. Advances in NE-Atlantic coastal sea level change monitoring by Delay Doppler altimetry. Adv. Space Res. 2021, 68, 571–592. [Google Scholar] [CrossRef]
- Banks, C.J.; Calafat, F.M.; Shaw, A.G.P.; Snaith, H.M.; Gommenginger, C.P.; Bouffard, J. A new daily quarter degree sea level anomaly product from CryoSat-2 for ocean science and applications. Sci. Data 2023, 10, 477. [Google Scholar] [CrossRef]
- Wingham, D.; Francis, C.; Baker, S.; Bouzinac, C.; Brockley, D.; Cullen, R.; de Chateau-Thierry, P.; Laxon, S.; Mallow, U.; Mavrocordatos, C.; et al. CryoSat: A mission to determine the fluctuations in the Earth’s land and marine ice fields. Adv. Space Res. 2006, 37, 841–871. [Google Scholar] [CrossRef]
- Shea, M. The CryoSat Satellite Altimetry Mission: Eight Years of Scientific Exploitation. Adv. Space Res. 2018, 62, 1177. [Google Scholar] [CrossRef]
- Parrinello, T.; Shepherd, A.; Bouffard, J.; Badessi, S.; Casal, T.; Davidson, M.; Fornari, M.; Maestroni, E.; Scagliola, M. CryoSat: ESA’s ice missio—Eight years in space. Adv. Space Res. 2018, 62, 1178–1190. [Google Scholar] [CrossRef]
- Raney, R.K. The Delay/Doppler Radar Altimeter. IEEE Trans. Geosci. Remote Sens. 1998, 36, 1578–1588. [Google Scholar] [CrossRef]
- Bouffard, J.; Webb, E.; Scagliola, M.; Garcia-Mondéjar, A.; Baker, S.; Brockley, D.; Gaudelli, J.; Muir, A.; Hall, A.; Mannan, R.; et al. CryoSat instrument performance and ice product quality status. Adv. Space Res. 2018, 62, 1526–1548. [Google Scholar] [CrossRef]
- Naeije, M.; Bouffard, J. Long-term quality and stability assessment of CryoSat-2 Ocean Data. Adv. Space Res. 2019, 86, 1194–1215. [Google Scholar] [CrossRef]
- WMO. Global Climate Observing System, “Essential Climate Variables”. 2018. Available online: https://public.wmo.int/en/programmes/global-climate-observing-system/essential-climate-variables (accessed on 1 September 2023).
- Cazenave, A.; Dieng, H.; Meyssignac, B.; von Schuckmann, K.; Decharme, B.; Berthier, E. The rate of sea level rise. Nat. Clim. Chang. 2014, 4, 358–361. [Google Scholar] [CrossRef]
- Ablain, M.; Cazenave, A.; Larnicol, G.; Balmaseda, M.; Cipollini, P.; Faugère, Y.; Fernandes, M.; Henry, O.; Johannessen, J.; Knudsen, P.; et al. Improved sea level record over the satellite altimetry era (1993–2010) from the Climate Change Initiative project. Ocean Sci. 2015, 11, 67–82. [Google Scholar] [CrossRef]
- Legeais, J.F.; Ablain, M.; Zawadzki, L.; Zuo, H.; Johannessen, J.; Scharffenberg, M.; Fenoglio-Marc, L.; Fernandes, M.; Andersen, O.; Rudenko, S.; et al. An improved and homogeneous altimeter sea level record from the ESA Climate Change Initiative. Earth Syst. Sci. Data 2018, 10, 281–301. [Google Scholar] [CrossRef]
- Kokolakis, C.; Piretzidis, D.; Mertikas, S.P. Impact of Satellite Attitude on Altimetry Calibration with Microwave Transponders. Remote Sens. 2022, 14, 6369. [Google Scholar] [CrossRef]
- Garcia-Mondéjar, A.; Fornari, M.; Bouffard, J.; Féménias, P.; Roca, M. CryoSat-2 range, datation and interferometer calibration with Svalbard transponder. Adv. Space Res. 2018, 62, 1589–1609. [Google Scholar] [CrossRef]
- Bonnefond, P.; Exertier, P.; Laurain, O.; Guinle, T.; Féménias, P. Corsica: A 20-Yr multi-mission absolute altimeter calibration site. Adv. Space Res. 2021, 68, 1171–1186. [Google Scholar] [CrossRef]
- Garcia-Mondéjar, A.; Scagliola, M.; Gourmelen, N.; Bouffard, J.; Roca, M. Roll Calibration for CryoSat-2: A Comprehensive Approach. Remote Sens. 2021, 13, 302. [Google Scholar] [CrossRef]
- Dawson, G.J.; Landy, J.C. Comparing elevation and backscatter retrievals from CryoSat-2 and ICESat-2 over Arctic summer sea ice. Cryosphere 2023, 17, 4165–4178. [Google Scholar] [CrossRef]
- Scharroo, R.; Leuliette, E.; Naeije, M.; Martin-Puig, C.; Pires, N. RADS Version 4: An Efficient Way to Analyse the Multi-Mission Altimeter Database. In Proceedings of the ESA Living Planet Symposium, Prague, Czech Republic, 9–13 May 2016; Ouwehand, L., Ed.; ESA SP series. [S.I.] European Space Agency: Noordwijk, The Netherlands, 2016; p. 428, SP-740 (CD-ROM). ISBN 978-92-9221-305-3. [Google Scholar]
- Schrama, E.; Naeije, M. CryoSat-2 Precise Orbit Determination and SIRAL Ocean Data Validation; Final Report, ESA Contract 4000112740 2.0; TU Delft, Space Engineering: Delft, The Netherlands, 2018. [Google Scholar]
- Mertz, F.; Dumont, J.; Urien, S. Baseline-C CryoSat Ocean Processor: Ocean Product Handbook; ESA, ESRIN Publications: Frascati, Italy, 2017. [Google Scholar]
- Ray, R. A Global Ocean Tide Model from TOPEX/POSEIDON Altimetry: GOT99.2. NASA Techn. Mem. 209478, Goddard Space Flight Center, 1999. Available online: https://ntrs.nasa.gov/search.jsp?R=19990089548 (accessed on 21 October 2023).
- Lyard, F.; Lefevre, F.; Letellier, T.; Francis, O. Modelling the global ocean tides: Modern insights from FES2004. Ocean Dyn. 2006, 56, 394–415. [Google Scholar] [CrossRef]
- Schaeffer, P.; Faugére, Y.; Legeais, J.F.; Ollivier, A.; Guinle, T.; Picot, N. The CNES_CLS11 Global Mean Sea Surface Computed from 16 Years of Satellite Altimeter Data. Mar. Geod. 2012, 35, 3–19. [Google Scholar] [CrossRef]
- Andersen, O.; Stenseng, L.; Piccioni, G.; Knudsen, P. The DTU15 MSS (Mean Sea Surface) and DTU15LAT (Lowest Astronomical Tide) reference surface. In Proceedings of the ESA Living Planet Conference, Prague, Czech Republic, 9–13 May 2016; Available online: https://ftp.space.dtu.dk/pub/DTU15/DOCUMENTS/MSS/DTU15MSS+LAT.pdf (accessed on 21 October 2023).
- Iijima, B.; Harris, I.; Ho, C.; Lindqwister, U.; Mannucci, A.; Pi, X.; Reyes, M.; Sparks, L.; Wilson, B. Automated Daily Process for Global Ionospheric Total Electron Content Maps and Satellite Ocean Altimeter Ionospheric Calibration Based on Global Positioning System Data. J. Atmos. Sol.-Terr. Phys. 1999, 61, 1205–1218. [Google Scholar] [CrossRef]
- Scharroo, R.; Smith, W.H. A global positioning system–based climatology for the total electron content in the ionosphere. J. Geophys. Res. 2010, 115, A10. [Google Scholar] [CrossRef]
- Dettmering, D.; Schwatke, C. Ionospheric Corrections for Satellite Altimetry—Impact on Global Mean Sea Level Trends. Earth Space Sci. 2022, 9, e2021EA002098. [Google Scholar] [CrossRef]
- Naeije, M.C.; Simons, W.J.F.; Pradit, S.; Niemnil, S.; Thongtham, N.; Mustafar, M.A.; Noppradit, P. Monitoring Megathrust-Earthquake-Cycle-Induced Relative Sea-Level Changes near Phuket, South Thailand, Using (Space) Geodetic Techniques. Remote Sens. 2022, 14, 5145. [Google Scholar] [CrossRef]
- Wessel, P.; Luis, J.F.; Uieda, L.; Scharroo, R.; Wobbe, F.; Smith, W.H.F.; Tian, D. The Generic Mapping Tools Version 6. Geochem. Geophys. Geosyst. Tech. Rep. Methods 2019, 20, 5556–5564. [Google Scholar] [CrossRef]
- Holgate, S.; Matthews, A.; Woodworth, P.; Rickards, L.; Tamisiea, M.; Bradshaw, E.; Foden, P.; Gordon, K.; Jevrejeva, S.; Pugh, J. New Data Systems and Products at the Permanent Service for Mean Sea Level. J. Coast. Res. 2013, 29, 493–504. [Google Scholar] [CrossRef]
- PSMSL. Permanent Service for Mean Sea Level, “Tide Gauge Data”. 2018. Available online: http://www.psmsl.org/data/obtaining/ (accessed on 1 December 2022).
- Peltier, W. Global glacial isostasy and the surface of the ice-age Earth: The ICE-5G (VM2) Model and GRACE. Annu. Rev. Earth Planet. Sci. 2004, 32, 111–149. [Google Scholar] [CrossRef]
- Lyard, F.H.; Allain, D.J.; Cancet, M.; Carrère, L.; Picot, N. FES2014 global ocean tide atlas: Design and performance. Ocean Sci. 2021, 17, 615–649. [Google Scholar] [CrossRef]
- Andersen, O.B.; Rose, S.K.; Abulaitijiang, A.; Zhang, S.; Fleury, S. The DTU21 global mean sea surface and first evaluation. Earth Syst. Sci. Data 2023, 15, 4065–4075. [Google Scholar] [CrossRef]
- Schaeffer, P.; Pujol, M.I.; Veillard, P.; Faugere, Y.; Dagneaux, Q.; Dibarboure, G.; Picot, N. The CNES CLS 2022 Mean Sea Surface: Short Wavelength Improvements from CryoSat-2 and SARAL/AltiKa High-Sampled Altimeter Data. Remote Sens. 2023, 15, 2910. [Google Scholar] [CrossRef]
- Schrama, E. (Aerospace TU Delft, Delft, The Netherlands). Private communication, 2023. [Google Scholar]
- Ablain, M.; Legeais, J.; Prandi, P.; Marcos, M.; Fenoglio-Marc, L.; Dieng, H.; Benveniste, J.; Cazenave, A. Satellite altimetry-based sea level at global and regional scales. In Integrative Study of the Mean Sea Level and Its Components; Cazenave, A., Champollion, N., Paul, F., Benveniste, J., Eds.; Space Sciences Series of ISSI; Springer: Cham, Switzerland, 2017; Volume 58, pp. 9–33. [Google Scholar] [CrossRef]
- Kern, M.; Cullen, R.; Berruti, B.; Bouffard, J.; Casal, T.; Drinkwater, M.; Gabriele, A.; Lecuyot, A.; Ludwig, M.; Midthassel, R.; et al. The Copernicus Polar Ice and Snow Topography Altimeter (CRISTAL) high-priority candidate mission. Cryosphere 2020, 14, 2235–2251. [Google Scholar] [CrossRef]























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Satellite/Mission | Phase | Cycles | Abbrev. | Satellite/Mission | Phase | Cycles | Abbrev. |
|---|---|---|---|---|---|---|---|
| CryoSat-2 GOP | a | 4–165 | CG | Sentinel-3A | a | 1–94 | 3A |
| CryoSat-2 RADS | a | 4–165 | C2 | Sentinel-3B | a | 9–14 | 3Ba |
| Jason-2 | a | 75–303 | J2a | Sentinel-3B | b | 19–75 | 3Bb |
| Jason-2 | b | 305–327 | J2b | SARAL | a | 1–35 | SAa |
| Jason-2 | c | 332–355 | J2c | SARAL | b | 36–104 | SAb |
| Jason-2 | d | 356–383 | J2d | Sentinel-6A | a | 4–81 | 6A |
| Jason-3 | a | 0–227 | J3a | ||||
| Jason-3 | b | 300–328 | J3b |
| Case | [] | hor [] | R [-] | sd [cm] | Tilt [mm/yr] | N. P |
|---|---|---|---|---|---|---|
| 025 | 0.25 | 0.75 | 0.76 | 7.1 | 0.02 | 229 |
| 050 | 0.50 | 1.50 | 0.80 | 6.0 | 0.13 | 267 |
| 075 | 0.75 | 2.25 | 0.82 | 5.5 | 0.22 | 281 |
| 100 | - | 1.00 | 0.81 | 5.6 | 0.23 | 278 |
| 125 | - | 1.25 | 0.82 | 5.4 | 0.37 | 287 |
| 150 | - | 1.50 | 0.83 | 5.1 | 0.39 | 288 |
| SLA | Chosen Model | Remark |
|---|---|---|
| alt | CNES GDR-E/F altitude | Orbits computed by CNES with strict Jason GDR-E/F standards |
| rng | Ku-band altimeter range | Tracker range corrected for drift, delay, and antenna offset |
| dry | ECMWF dry troposphere | ECMWF operational analysis runs based on pressure fields |
| wet | ECMWF wet troposphere | ECMWF operational analysis runs based on pressure fields |
| ion | JPL GIM ionosphere | JPL 2-hourly maps of GPS TEC corrected for altimeter height |
| dac | MOG2D dynamic atmosphere | Ocean response to wind and pressure forcing |
| std | solid Earth tide | Cartwright–Taylor–Edden model with 2nd- and 3rd-order waves |
| otd | GOT410 ocean tide | GOT4.10c model based on Jason altimetry |
| ltd | GOT410 load tide | GOT4.10c model based on Jason altimetry |
| ptd | pole tide | model suggested by Wahr (1985) |
| ssb | CLS nonparametric SSB | Nonparametric sea state bias model for Ku-band by CLS |
| mss | CNES_CLS15 mean sea surface | CNES/CLS mss solution based on altimeter data (1993–2012) |
| rfo | reference frame offset | result from cal/val activities (−2.9 cm for RADS CryoSat-2) |
| (a) Dual-satellite crossover statistics for GOP CryoSat-2 crossings with RADS CryoSat-2, Jason-2, Jason-3, Sentinel-3A, Sentinel-3BSARAL, and Sentinel-6A. The last row displays the average of the SLA mean and rms difference in the satellite phases that are the longest, leaving out SARAL (other altimeter type) and leaving out Sentinel-6A (too much of a deviating XO mean). | |||||||||||
| with respect to | SLA [m] | SWH [m] | [dB] | WIND [m/s] | SSB [m] | XOs [no.] | |||||
| mean | sd | mean | sd | mean | sd | mean | sd | mean | sd | ||
| C2 | −0.029 | 0.035 | 0.000 | 0.710 | 0.001 | 1.585 | −0.003 | 2.770 | −0.000 | 0.032 | 343,365 |
| J2a | −0.029 | 0.037 | 0.002 | 1.006 | −0.257 | 1.451 | 0.167 | 3.521 | −0.038 | 0.038 | 1,133,727 |
| J2b | −0.028 | 0.036 | 0.008 | 0.998 | −0.249 | 1.485 | 0.143 | 3.545 | −0.037 | 0.038 | 116,963 |
| J2c | −0.029 | 0.037 | 0.001 | 1.006 | −0.232 | 1.487 | 0.073 | 3.593 | −0.038 | 0.038 | 177,958 |
| J2d | −0.029 | 0.037 | 0.008 | 1.008 | −0.254 | 1.490 | 0.124 | 3.520 | −0.038 | 0.038 | 160,395 |
| J3a | −0.029 | 0.037 | 0.010 | 1.015 | −2.863 | 1.521 | −0.011 | 3.605 | −0.018 | 0.038 | 1,286,827 |
| J3b | −0.026 | 0.039 | 0.021 | 1.021 | −2.850 | 1.500 | −0.064 | 3.563 | −0.019 | 0.038 | 135,512 |
| 3A | −0.029 | 0.037 | −0.093 | 0.952 | −0.128 | 1.517 | −0.148 | 3.275 | −0.008 | 0.036 | 620,735 |
| 3Ba | −0.033 | 0.039 | −0.076 | 0.957 | −0.173 | 1.547 | −0.051 | 3.199 | −0.007 | 0.036 | 31,053 |
| 3Bb | −0.028 | 0.037 | −0.099 | 0.953 | −0.187 | 1.513 | 0.032 | 3.238 | −0.008 | 0.036 | 375,064 |
| SAa | −0.027 | 0.037 | −0.002 | 0.945 | −0.043 | 1.634 | 0.115 | 3.175 | −0.053 | 0.037 | 288,403 |
| SAb | −0.023 | 0.037 | 0.010 | 0.936 | −0.131 | 1.635 | 0.323 | 3.146 | −0.054 | 0.037 | 529,370 |
| 6A | −0.018 | 0.038 | 0.023 | 1.017 | −1.641 | 1.484 | 0.019 | 3.574 | −0.019 | 0.038 | 428,821 |
| avg | - | - | - | - | - | - | - | - | - | ||
| (b) Single-satellite crossover statistics for GOP CryoSat-2, RADS CryoSat-2, Jason-2, Jason-3, Sentinel-3A, Sentinel-3B, and Sentinel-6A. | |||||||||||
| SLA [m] | SWH [m] | [dB] | WIND [m/s] | SSB [m] | XOs [no.] | ||||||
| mean | sd | mean | sd | mean | sd | mean | sd | mean | sd | ||
| CG | −0.007 | 0.035 | −0.000 | 0.715 | −0.005 | 1.591 | −0.013 | 2.788 | 0.000 | 0.032 | 179,905 |
| C2 | −0.007 | 0.035 | 0.002 | 0.710 | −0.003 | 1.586 | −0.014 | 2.765 | 0.000 | 0.032 | 128,201 |
| J2a | −0.000 | 0.034 | −0.003 | 0.981 | 0.003 | 1.440 | −0.006 | 3.440 | 0.000 | 0.032 | 522,648 |
| J2b | 0.000 | 0.033 | −0.001 | 0.978 | 0.003 | 1.470 | −0.002 | 3.482 | 0.000 | 0.032 | 51,426 |
| J2c | 0.001 | 0.034 | −0.004 | 0.983 | −0.008 | 1.464 | 0.018 | 3.511 | 0.000 | 0.032 | 80,525 |
| J2d | 0.001 | 0.035 | 0.004 | 0.982 | 0.008 | 1.490 | −0.010 | 3.448 | −0.000 | 0.031 | 71,546 |
| J3a | 0.000 | 0.035 | 0.001 | 1.006 | 0.004 | 1.571 | −0.003 | 3.623 | 0.000 | 0.034 | 608,933 |
| J3b | 0.000 | 0.038 | 0.002 | 1.003 | −0.003 | 1.553 | 0.014 | 3.632 | −0.000 | 0.034 | 74,187 |
| 3A | 0.003 | 0.034 | −0.008 | 0.958 | 0.015 | 1.636 | −0.021 | 3.219 | 0.000 | 0.032 | 340,851 |
| 3Ba | 0.001 | 0.034 | −0.009 | 0.927 | 0.012 | 1.700 | −0.024 | 3.051 | 0.000 | 0.030 | 16,685 |
| 3Bb | 0.003 | 0.034 | −0.001 | 0.957 | 0.015 | 1.617 | −0.019 | 3.153 | 0.000 | 0.032 | 208,379 |
| SAa | 0.002 | 0.033 | 0.001 | 0.930 | −0.012 | 1.770 | 0.034 | 2.948 | −0.000 | 0.022 | 158,932 |
| SAb | 0.003 | 0.034 | 0.003 | 0.919 | −0.005 | 1.757 | 0.026 | 2.901 | −0.000 | 0.022 | 276,546 |
| 6A | 0.000 | 0.035 | 0.001 | 1.008 | 0.001 | 1.534 | 0.007 | 3.605 | −0.000 | 0.034 | 210,622 |
| Correlation [-] | St. Dev. [cm] | Tilt [mm/yr] | |
|---|---|---|---|
| CG −TG | 0.82 | 5.7 | 0.17 |
| REF − TG | 0.84 | 4.9 | −0.11 |
| mean GIA | −0.27 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Naeije, M.; Di Bella, A.; Geminale, T.; Visser, P. CryoSat Long-Term Ocean Data Analysis and Validation: Final Words on GOP Baseline-C. Remote Sens. 2023, 15, 5420. https://doi.org/10.3390/rs15225420
Naeije M, Di Bella A, Geminale T, Visser P. CryoSat Long-Term Ocean Data Analysis and Validation: Final Words on GOP Baseline-C. Remote Sensing. 2023; 15(22):5420. https://doi.org/10.3390/rs15225420
Chicago/Turabian StyleNaeije, Marc, Alessandro Di Bella, Teresa Geminale, and Pieter Visser. 2023. "CryoSat Long-Term Ocean Data Analysis and Validation: Final Words on GOP Baseline-C" Remote Sensing 15, no. 22: 5420. https://doi.org/10.3390/rs15225420
APA StyleNaeije, M., Di Bella, A., Geminale, T., & Visser, P. (2023). CryoSat Long-Term Ocean Data Analysis and Validation: Final Words on GOP Baseline-C. Remote Sensing, 15(22), 5420. https://doi.org/10.3390/rs15225420