
High Signal-to-Noise Ratio MEMS Noise Listener for Ship Noise Detection

 ,
,
Abstract
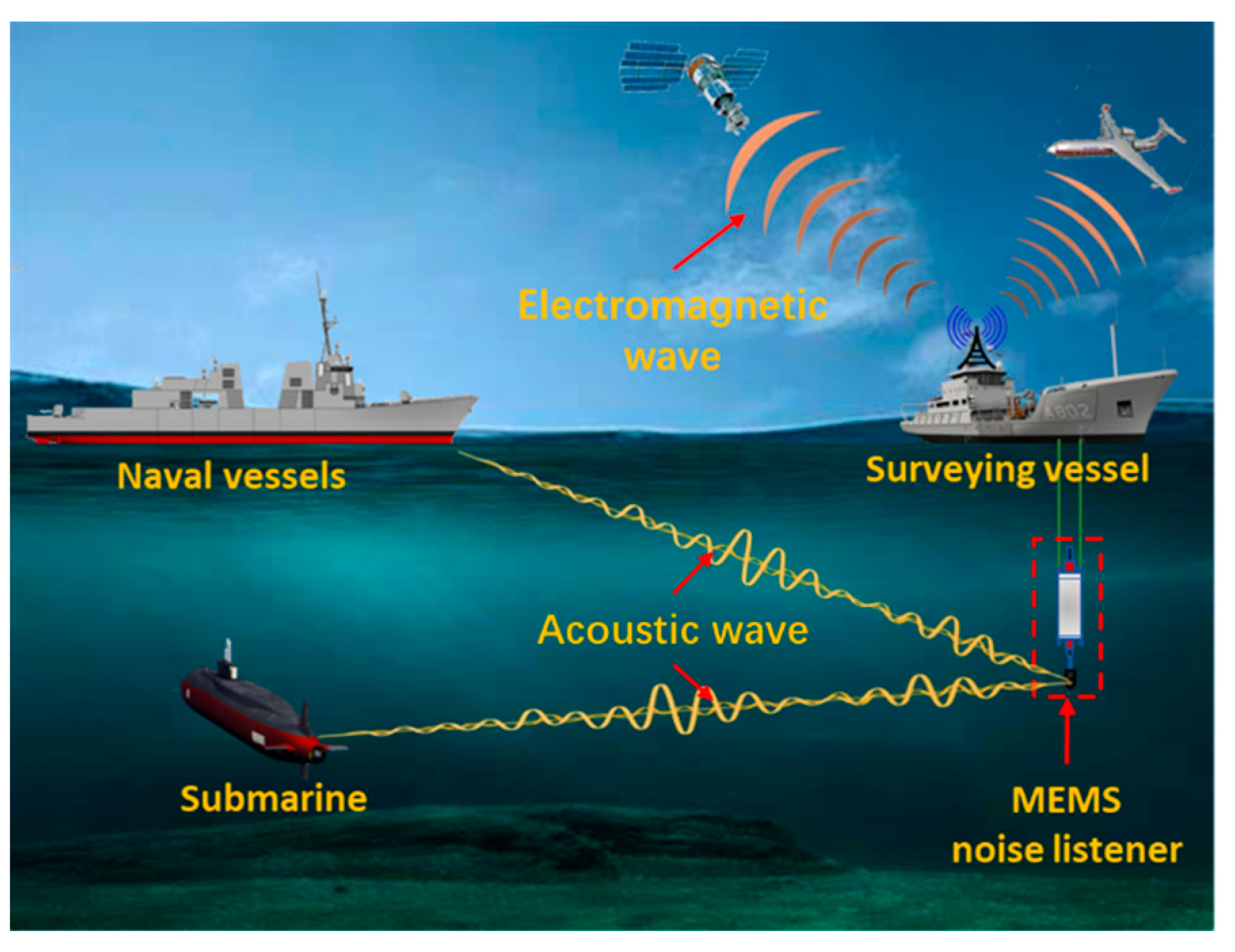
:1. Introduction
2. Materials and Methods
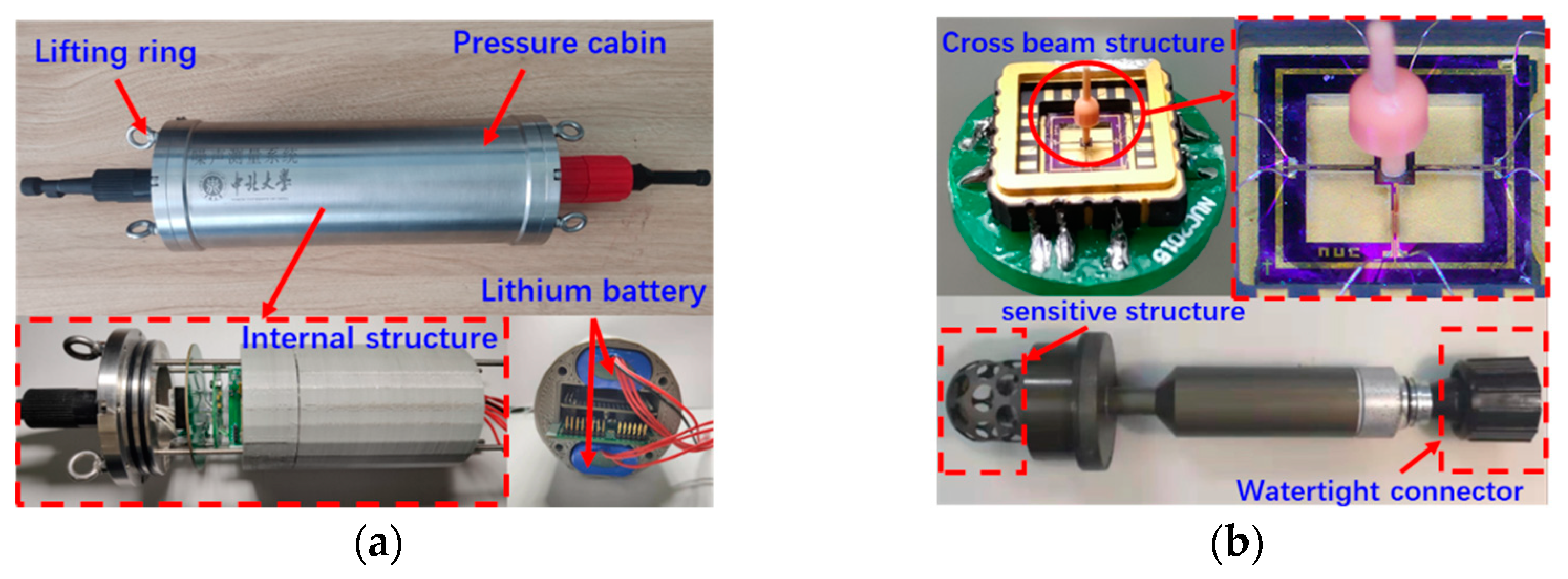
2.1. Composition of MEMS Noise Listener
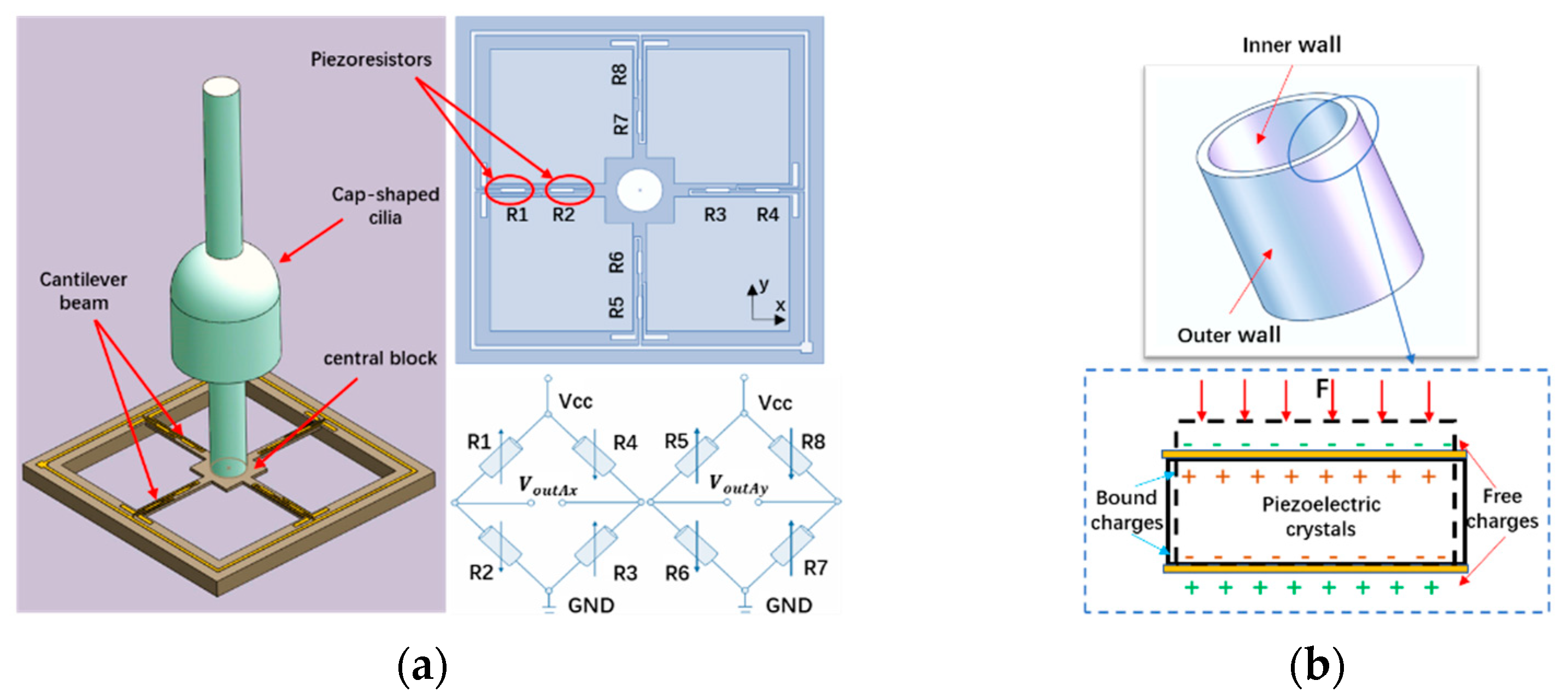
2.2. MEMS Vector-Sensitive Probe Sensing Principle
3. Measurement Principle of Ship Radiated Noise
3.1. Sound Intensity Estimation Principle
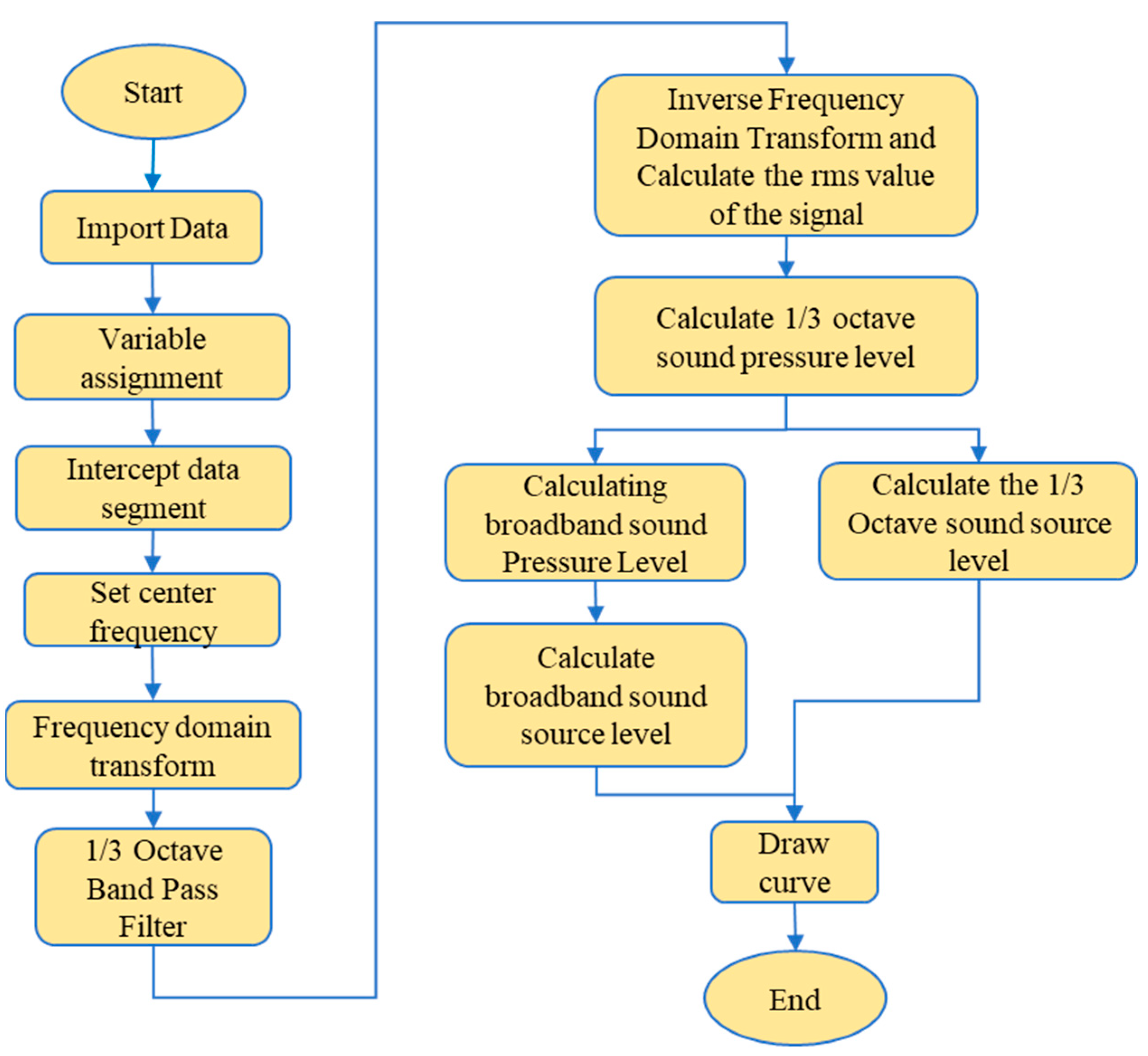
3.2. Radiated Noise Sound Source Level Calculation Method
4. Results
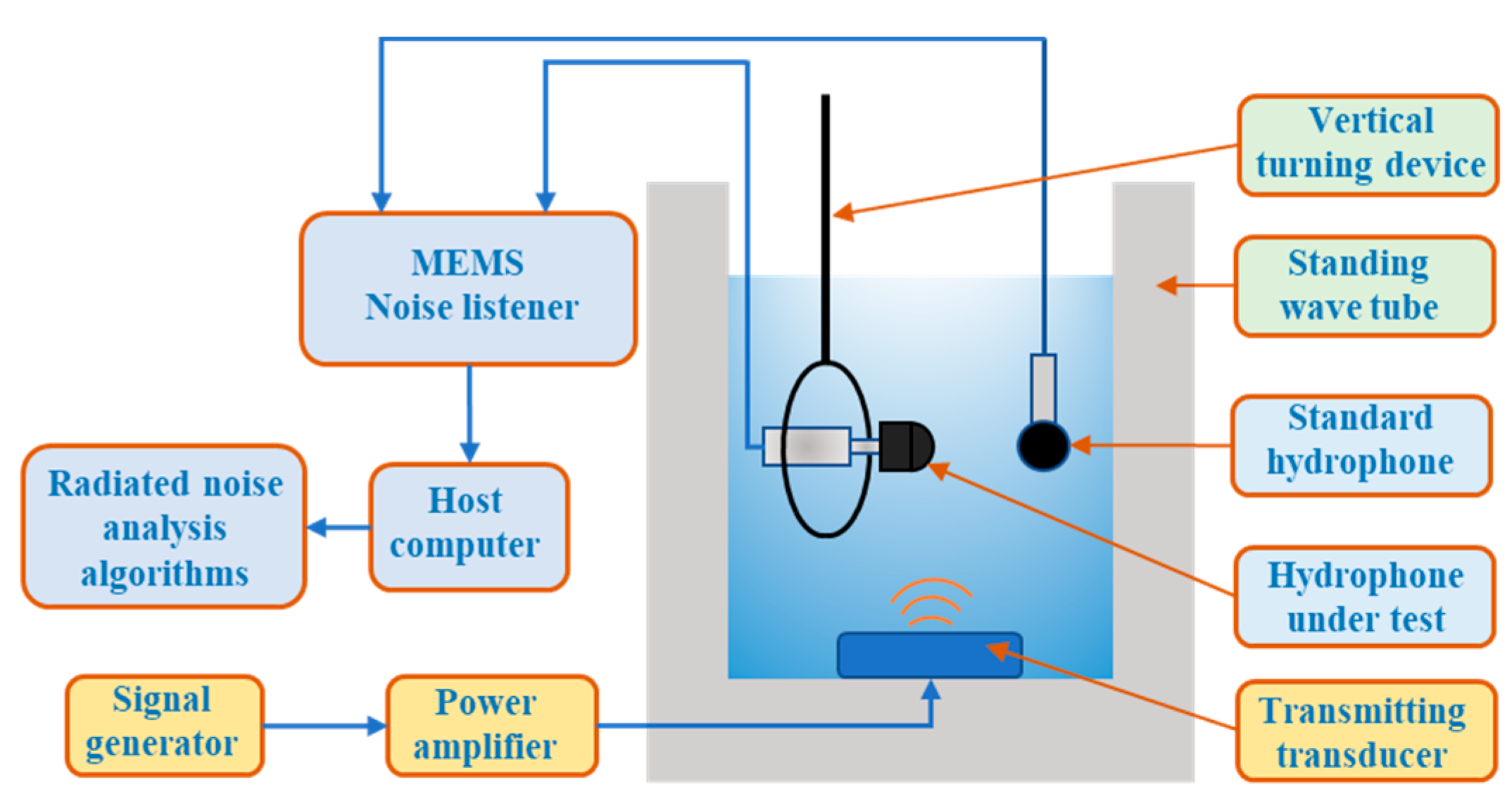
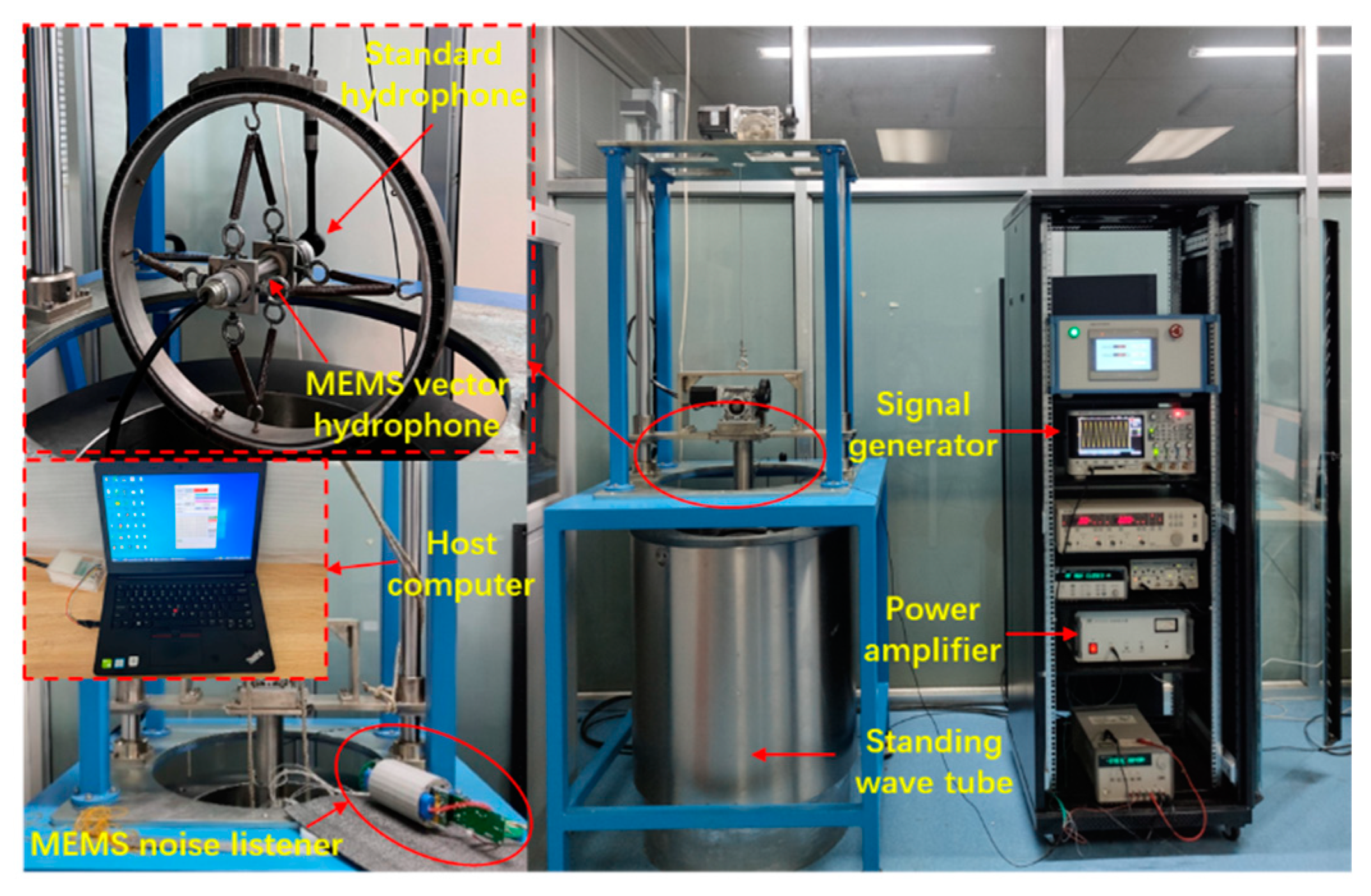
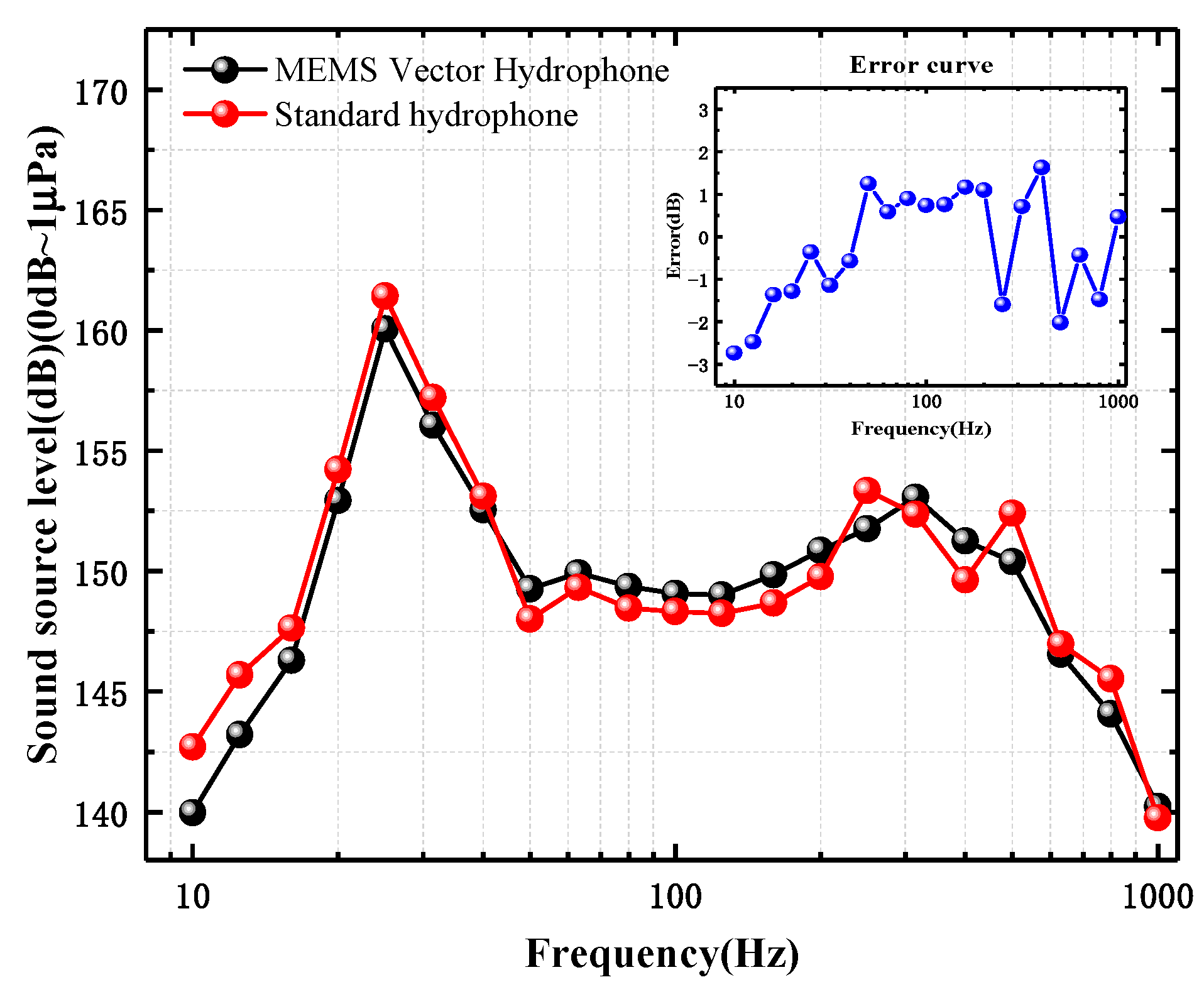
4.1. Error Calibration Experiment
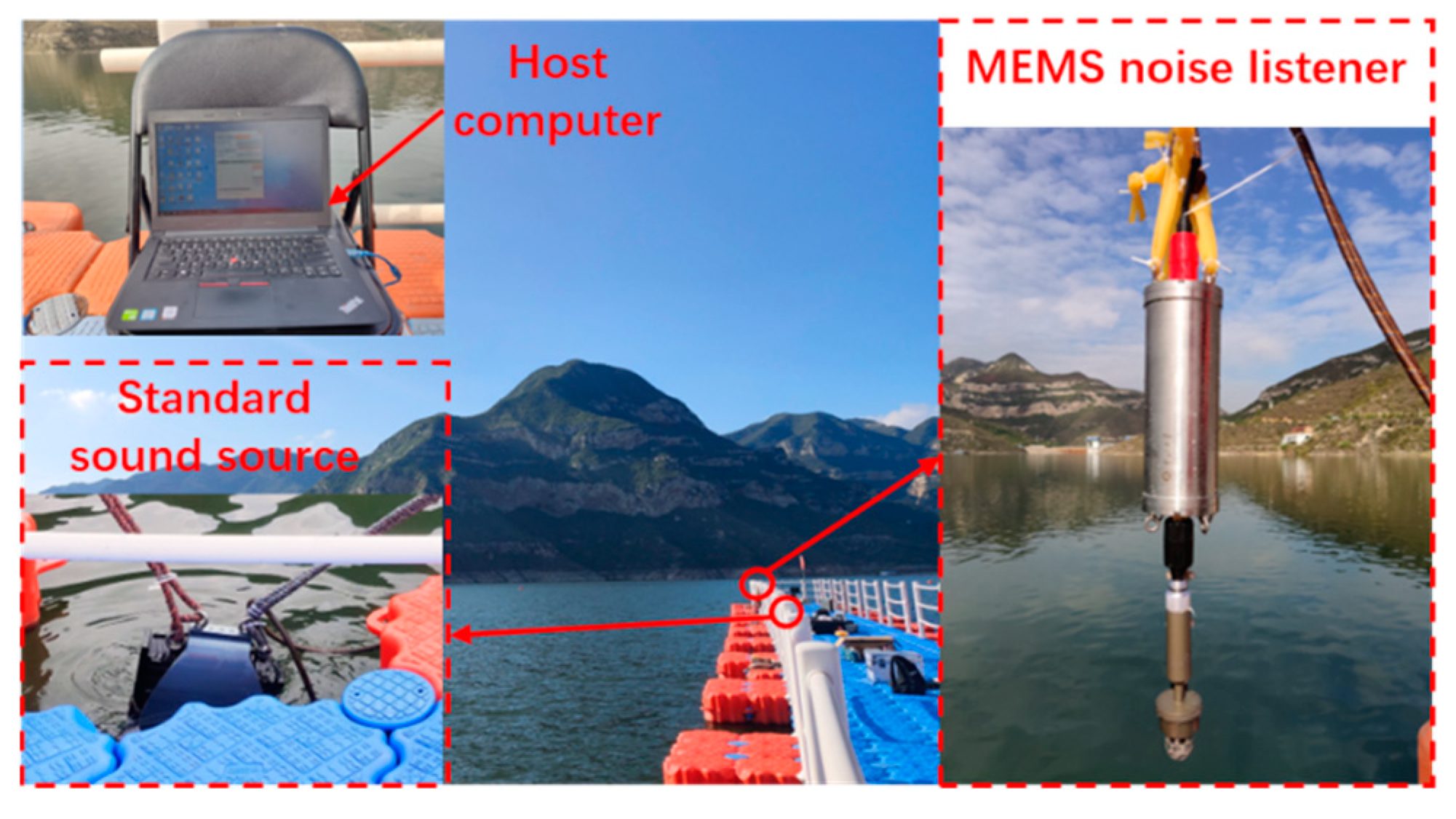
4.2. Outfield Experiment
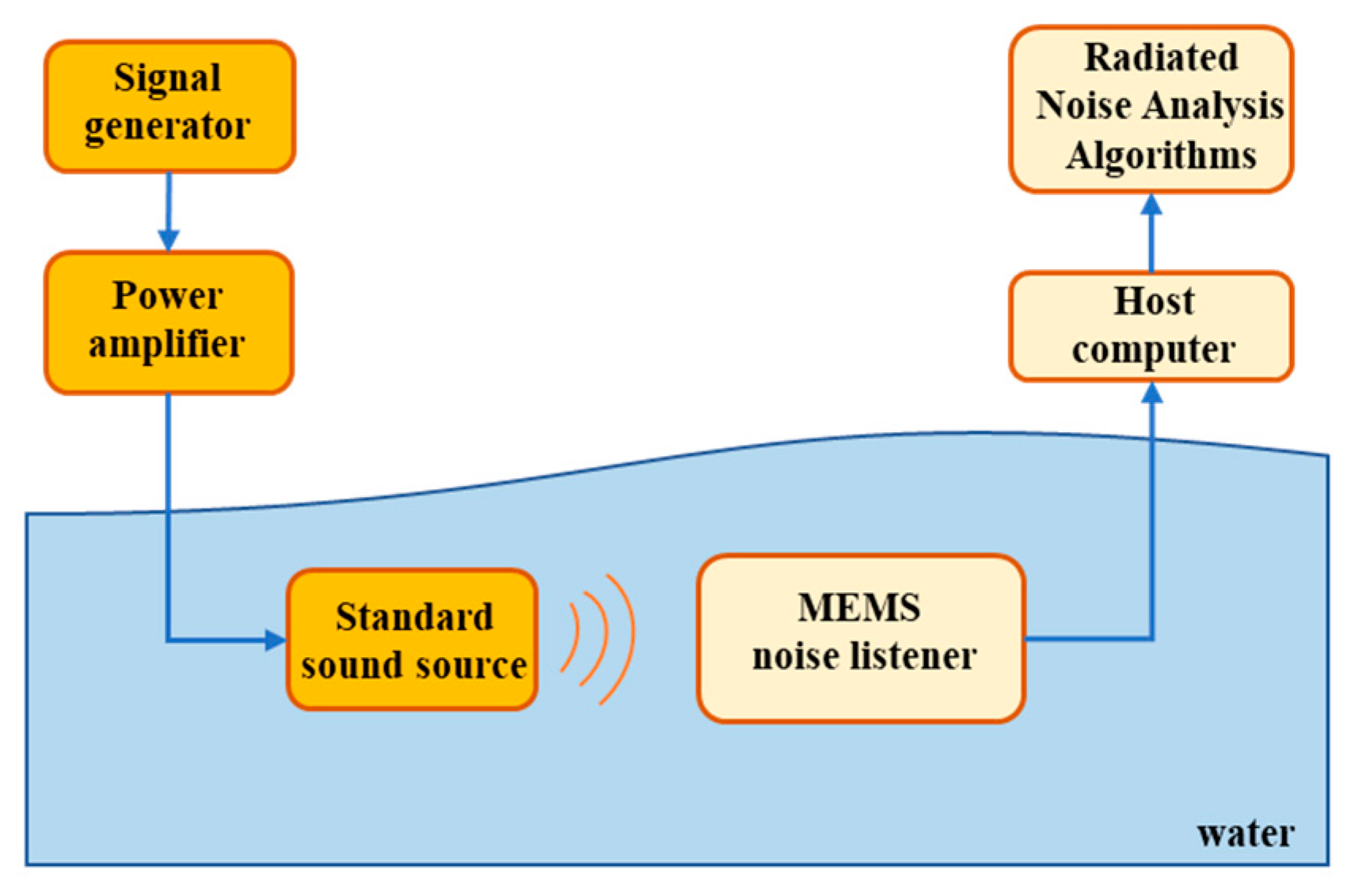
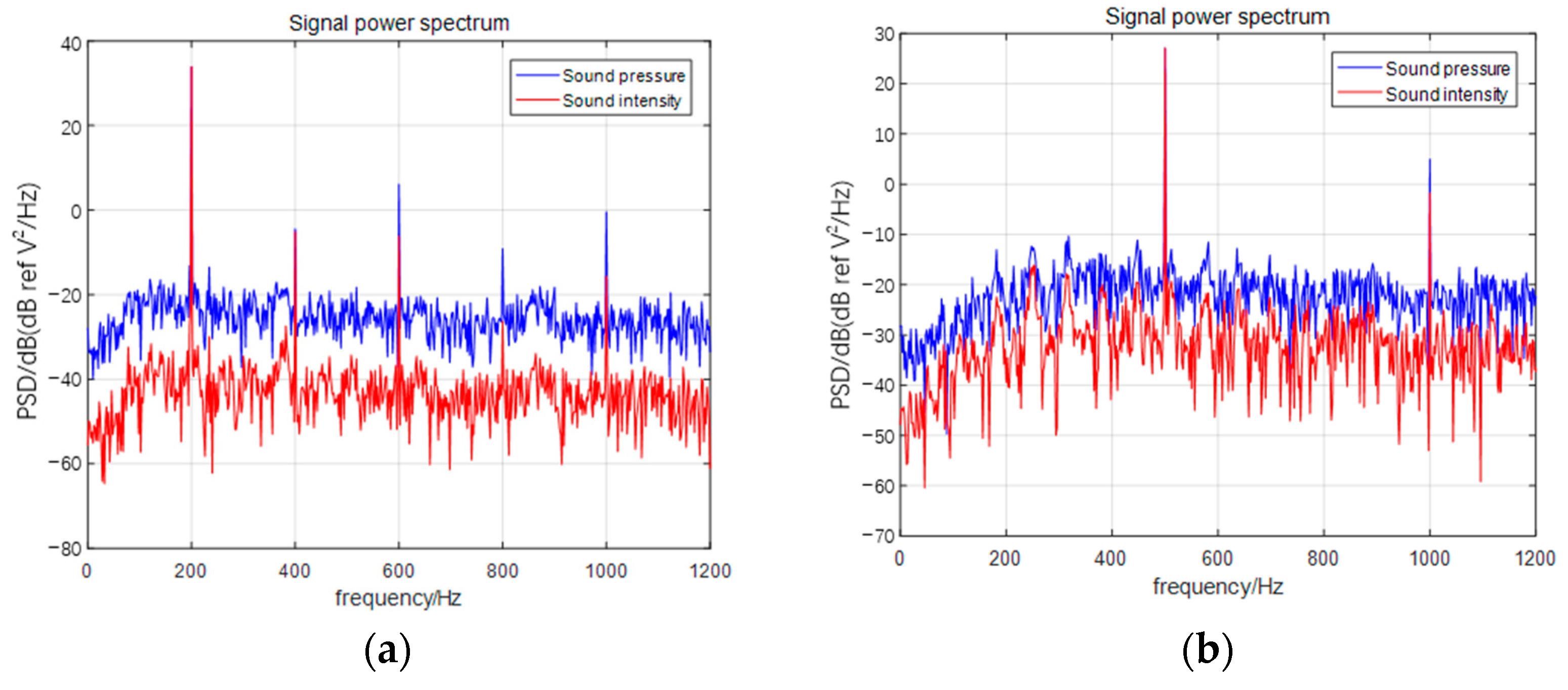
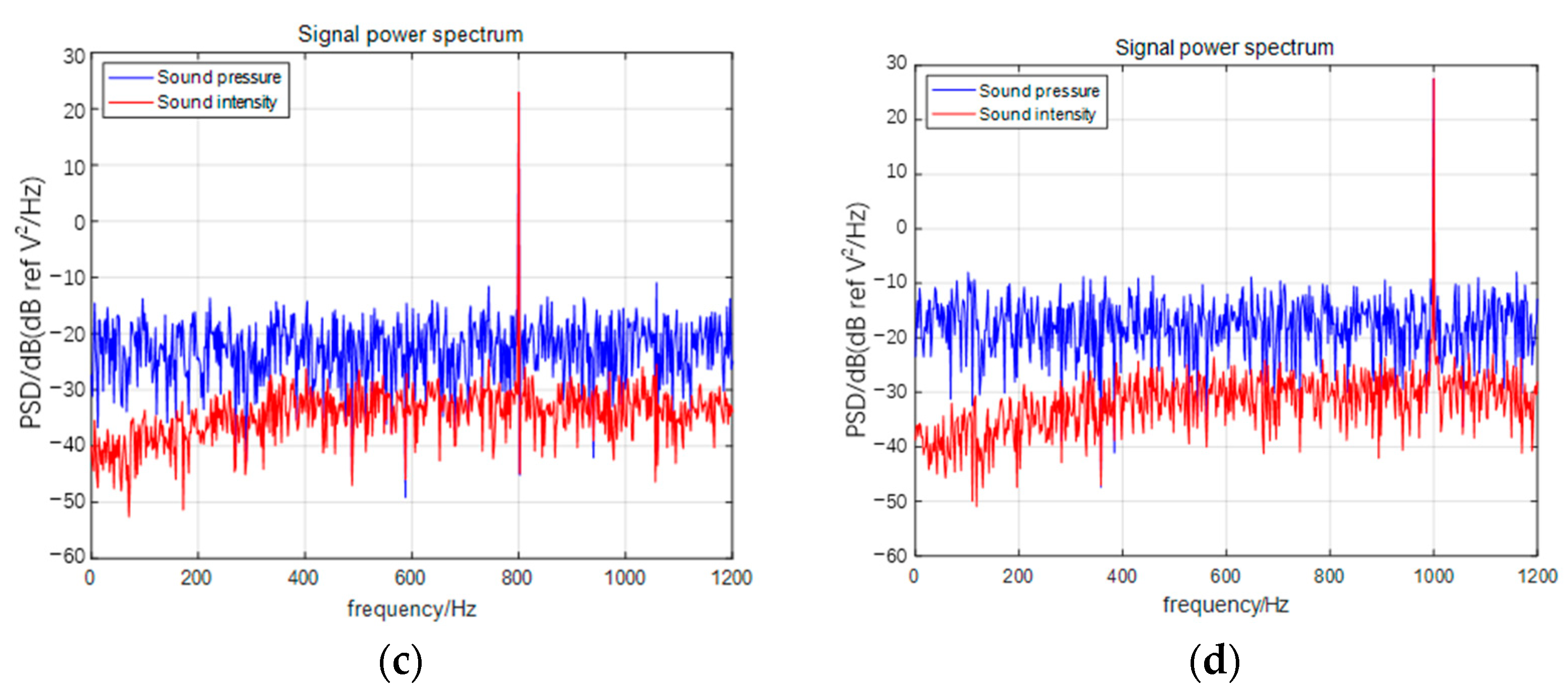
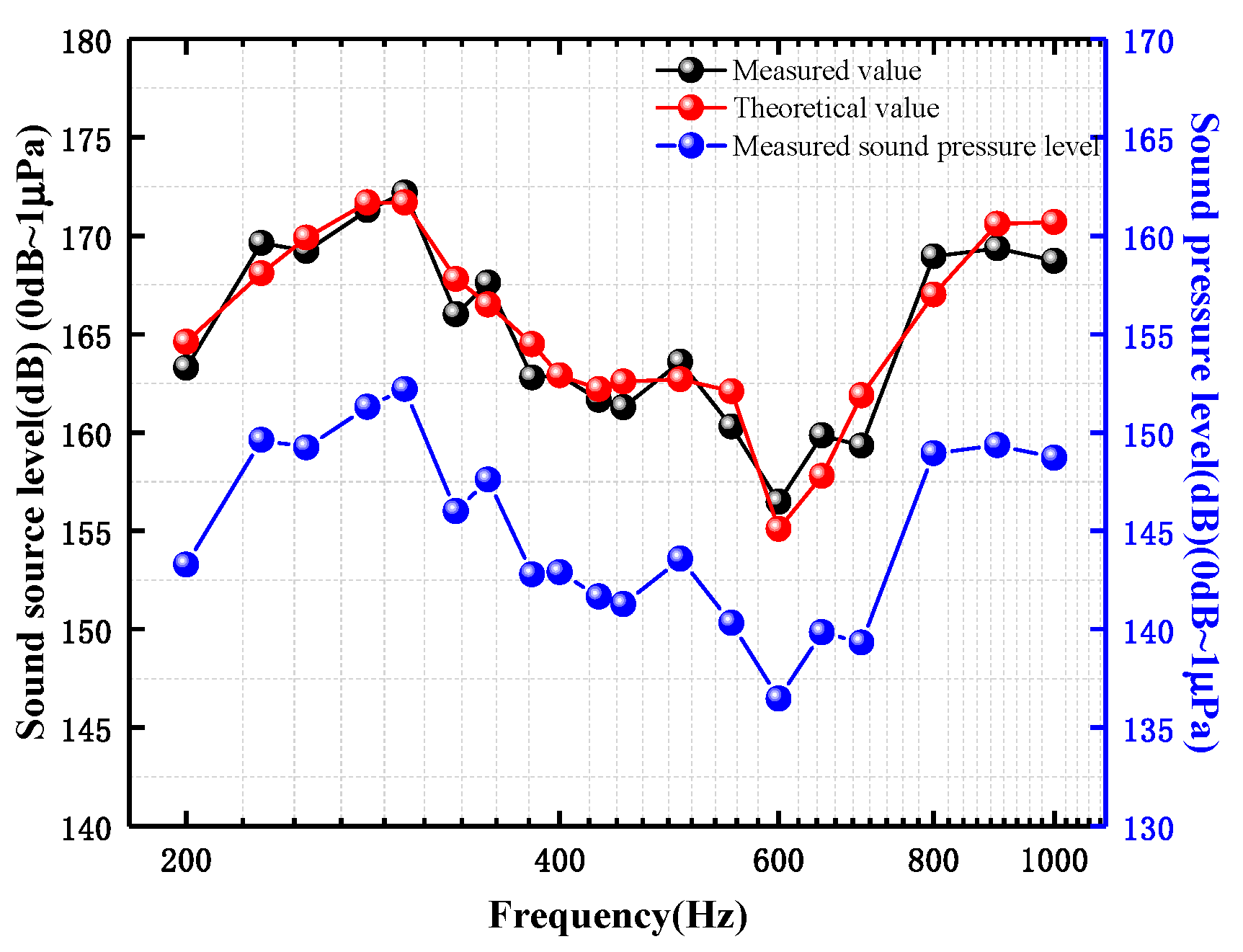
4.2.1. Standard Sound Source Emission Experiment
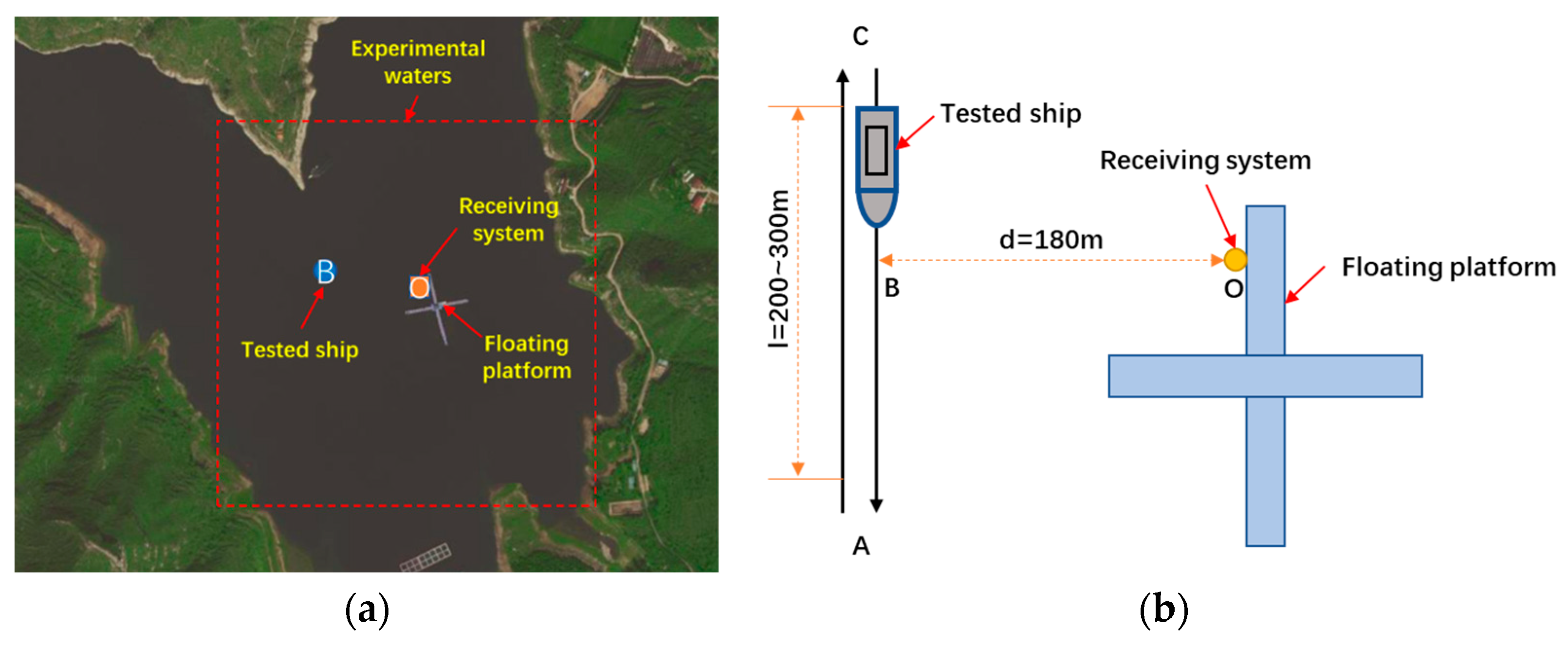
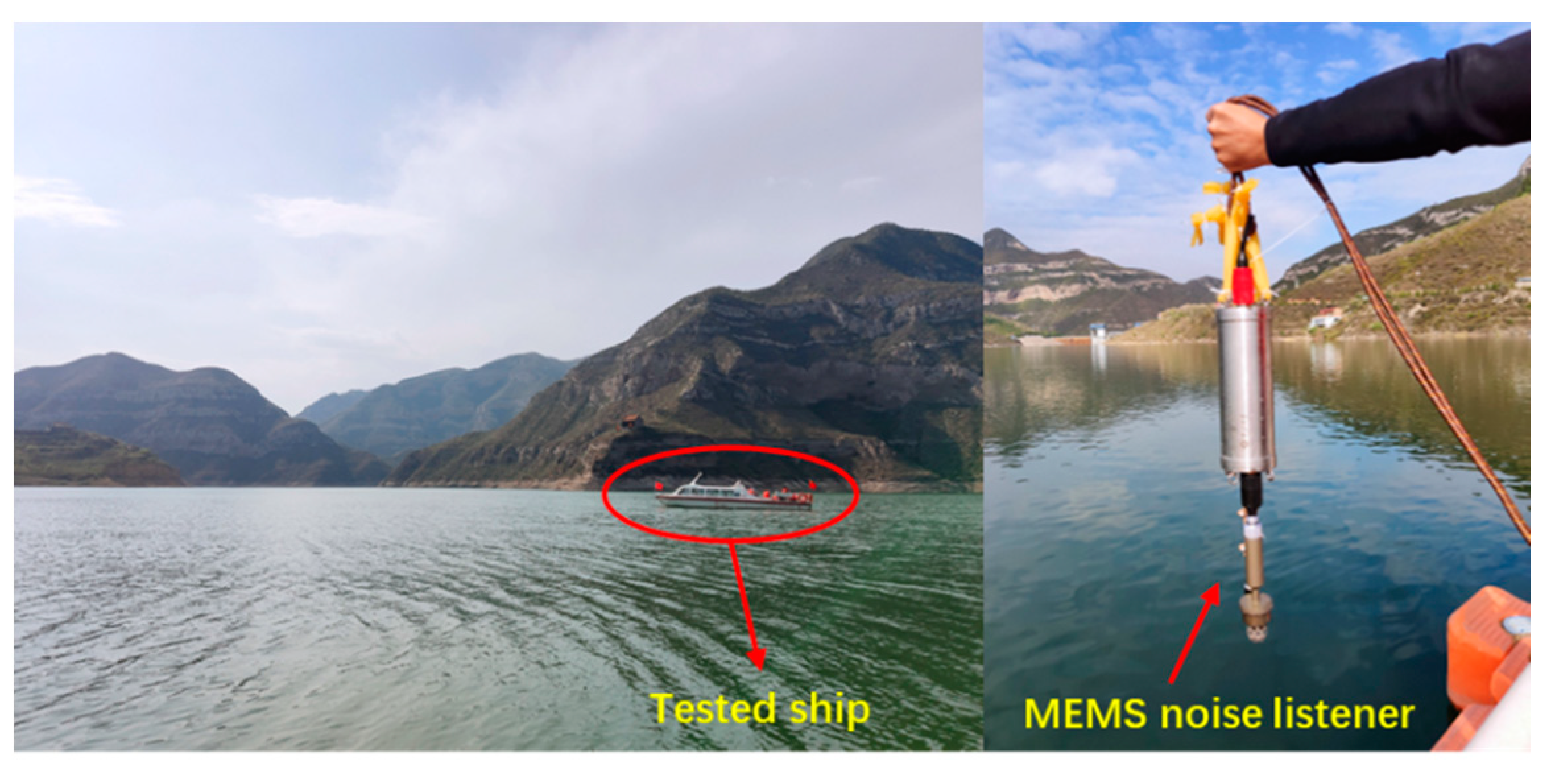
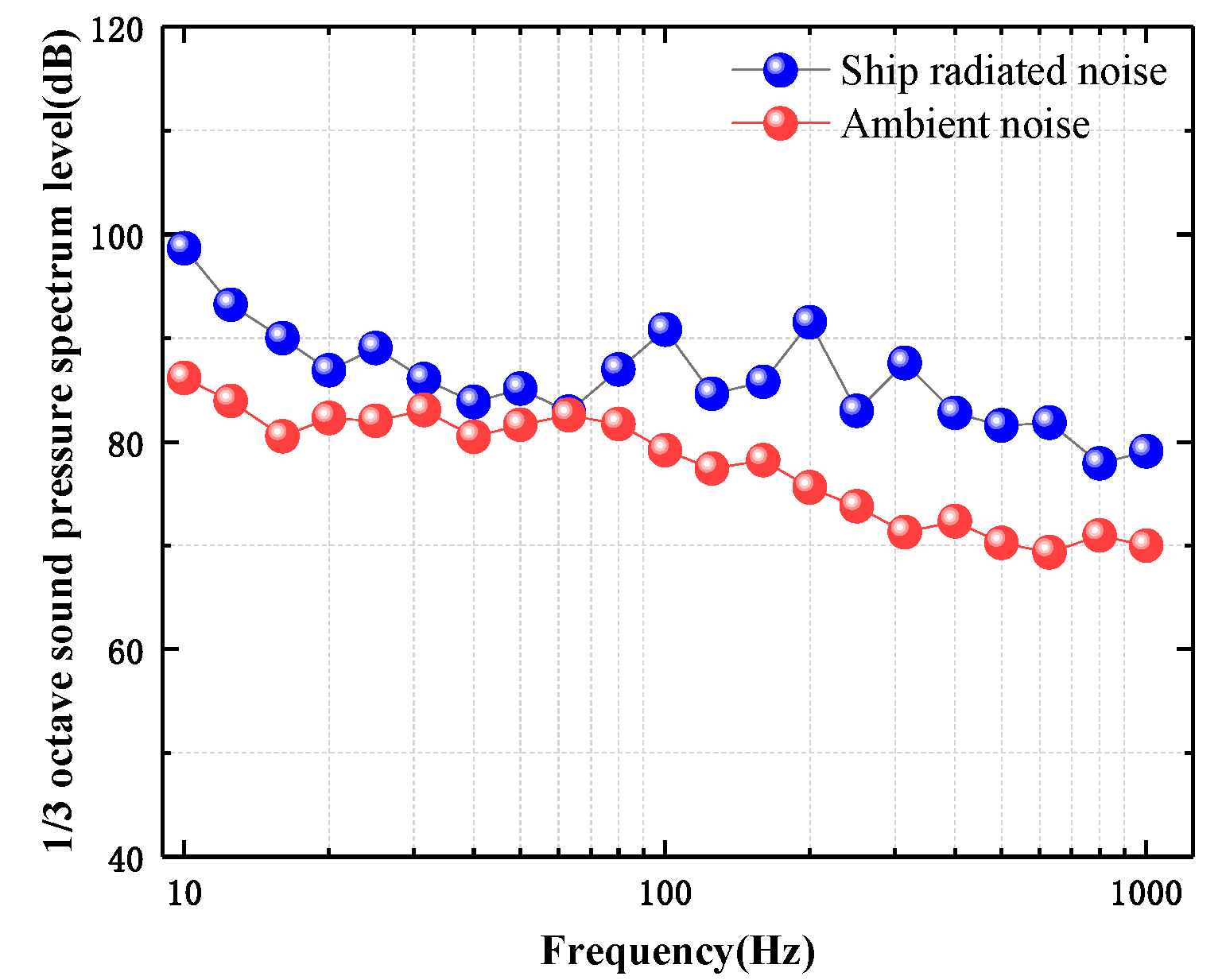
4.2.2. Traffic Ship Radiation Noise Monitoring Experiment
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Fillinger, L.; Sutin, A.; Sedunov, A. Acoustic ship signature measurements by cross-correlation method. J. Acoust. Soc. Am. 2011, 129, 774–778. [Google Scholar] [CrossRef] [PubMed]
- Wenz, G.M. Acoustic Ambient Noise in the Ocean: Spectra and Sources. J. Acoust. Soc. Am. 1962, 34, 1936–1956. [Google Scholar] [CrossRef]
- Arveson, P.T.; Vendittis, D.J. Radiated noise characteristics of a modern cargo ship. J. Acoust. Soc. Am. 2000, 107, 118–129. [Google Scholar] [CrossRef] [PubMed]
- Wenz, G.M. Low-frequency deep-water ambient noise along the Pacific Coast of the United States. US Navy J. Underw. Acoust. 1969, 19, 423–444. [Google Scholar]
- Ross, D. Mechanics of underwater noise. J. Acoust. Soc. Am. 1989, 86, 1626. [Google Scholar] [CrossRef]
- Colosi, J.A.; Cornuelle, B.D.; Dushaw, B.D.; Dzieciuch, M.A.; Howe, B.M.; Mercer, J.A.; Spindel, R.C.; Worcester, P.F.; NPAL Group. The North Pacific Acoustic Laboratory (NPAL) Experiment. J. Acoust. Soc. Am. 2001, 107, 2384. [Google Scholar] [CrossRef]
- Curtis, K.R.; Howe, B.M.; Mercer, J.A. Low-frequency ambient sound in the North Pacific: Long time series observations. J. Acoust. Soc. Am. 1999, 100, 2733. [Google Scholar] [CrossRef]
- Chapman, N.R.; Price, A. Low frequency deep ocean ambient noise trend in the Northeast Pacific Ocean. Acoust. Soc. Am. 2011, 129, EL161–EL165. [Google Scholar] [CrossRef]
- Brooker, A.; Humphrey, V. Measurement of radiated underwater noise from a small research vessel in shallow water. Ocean. Eng. 2016, 120, 182–189. [Google Scholar] [CrossRef] [Green Version]
- Xue, C.; Chen, S.; Zhang, W.; Zhang, B.; Zhang, G.; Qiao, H. Design, fabrication, and preliminary characterization of a novel MEMS bionic vector hydrophone. Microelectron. J. 2007, 38, 1021–1026. [Google Scholar] [CrossRef]
- Shang, C.; Xue, C.; Zhang, B.; Xie, B.; Hui, Q. A Novel MEMS Based Piezoresistive Vector Hydrophone for Low Frequency Detection. In Proceedings of the International Conference on Mechatronics & Automation, Harbin, China, 5–9 August 2007. [Google Scholar]
- Ji, S.; Zhang, L.; Zhang, W.; Zhang, G.; Wang, R.; Song, J.; Zhang, X.; Lian, Y.; Shang, Z. Design and realization of dumbbell-shaped ciliary MEMS vector hydrophone. Sens. Actuators A Phys. 2020, 311, 112019. [Google Scholar] [CrossRef]
- Liu, Y.; Wang, R.; Zhang, G.; Du, J.; Zhao, L.; Xue, C.; Zhang, W.; Liu, J. “Lollipop-shaped” high-sensitivity Microelectromechanical Systems vector hydrophone based on Parylene encapsulation. J. Appl. Phys. 2015, 118, 044501. [Google Scholar] [CrossRef]
- Xu, Q.; Zhang, G.; Ding, J.; Wang, R.; Pei, Y.; Ren, Z.; Shang, Z.; Xue, C.; Zhang, W. Design and implementation of two-component cilia cylinder MEMS vector hydrophone. Sens. Actuators A Phys. 2018, 277, 142–149. [Google Scholar] [CrossRef]
- Zhu, S.; Zhang, G.J.; Shang, Z.Z.; Yang, X.; Lv, T.; Liang, X.Q.; Zhang, X.Y.; Chen, P.; Zhang, W.D. Design and realization of cap-shaped cilia MEMS vector hydrophone. Measurement 2021, 183, 109818. [Google Scholar] [CrossRef]
- Wang, R.; Shen, W.; Zhang, W.; Song, J.; Li, N.; Liu, M.; Zhang, G.; Xue, C.; Zhang, W. Design and implementation of a jellyfish otolith-inspired MEMS vector hydrophone for low-frequency detection. Microsyst. Nanoeng. 2021, 7, 1. [Google Scholar] [CrossRef]
- Zhu, S.; Zhang, G.J.; Wu, D.Y.; Liang, X.Q.; Zhang, Y.F.; Lv, T.; Liu, Y.; Chen, P.; Zhang, W.D. Research on Direction of Arrival Estimation Based on Self-Contained MEMS Vector Hydrophone. Micromachines 2022, 13, 236. [Google Scholar] [CrossRef] [PubMed]
- Shang, Z.; Zhang, W.; Zhang, G.; Zhang, X.; Ji, S.; Wang, R. Mixed near field and far field sources localization algorithm based on MEMS vector hydrophone array. Measurement 2019, 151, 107109. [Google Scholar] [CrossRef]
- Zhang, X.; Zhang, G.; Shang, Z.; Zhu, S.; Zhang, W. Research on DOA Estimation Based on Acoustic Energy Flux Detection Using a Single MEMS Vector Hydrophone. Micromachines 2021, 12, 168. [Google Scholar] [CrossRef]
- Zhang, G.; Zhang, L.; Ji, S.; Yang, X.; Wang, R.; Zhang, W.; Yang, S. Design and Implementation of a Composite Hydrophone of Sound Pressure and Sound Pressure Gradient. Micromachines 2021, 12, 939. [Google Scholar] [CrossRef]
- Hutt, D.; Hines, P.C.; Rosenfeld, A. Measurement of underwater sound intensity vector. Can. Acoust. 1999, 23, 16–17. [Google Scholar]
- Jinglin, D.U.; Zhongcheng, M.A.; Ran, L.I.; Chen, J. Measurement of Background Noise of the South China Sea Based on Vector Hydrophone. J. Test Meas. Technol. 2014, 126, 299–304. [Google Scholar]
- Xiao, Y.; Han, Y.; Liu, X. Measurement Technique of Noise Acoustic Intensity Based on Vector Hydrophone. Sci. Technol. Inf. 2009, 3, 45–46. [Google Scholar]
- Feng, C.; Zhou, B.K.; Cheng, L.Q.; Huang, J.D.; Weng, H.L. Design of third-octave band FIR digital filters based on MATLAB. J. Fuzhou Univ. 2003, 10, 101–104. [Google Scholar]
- Wu, D.Y.; Zhang, G.J.; Zhu, S. A baseline drift removal algorithm based on cumulative sum and downsampling for hydroacoustic signal. Measurement 2023, 207, 112344. [Google Scholar] [CrossRef]



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| SNR (dB) | Radiation Noise Level Correction (dB) |
|---|---|
| 10 | 0.5 |
| 9 | 0.5 |
| 8 | 1.0 |
| 7 | 1.0 |
| 6 | 1.0 |
| <6 | Invalid |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhu, S.; Zhang, G.; Wu, D.; Jia, L.; Zhang, Y.; Geng, Y.; Liu, Y.; Ren, W.; Zhang, W. High Signal-to-Noise Ratio MEMS Noise Listener for Ship Noise Detection. Remote Sens. 2023, 15, 777. https://doi.org/10.3390/rs15030777
Zhu S, Zhang G, Wu D, Jia L, Zhang Y, Geng Y, Liu Y, Ren W, Zhang W. High Signal-to-Noise Ratio MEMS Noise Listener for Ship Noise Detection. Remote Sensing. 2023; 15(3):777. https://doi.org/10.3390/rs15030777
Chicago/Turabian StyleZhu, Shan, Guojun Zhang, Daiyue Wu, Li Jia, Yifan Zhang, Yanan Geng, Yan Liu, Weirong Ren, and Wendong Zhang. 2023. "High Signal-to-Noise Ratio MEMS Noise Listener for Ship Noise Detection" Remote Sensing 15, no. 3: 777. https://doi.org/10.3390/rs15030777
APA StyleZhu, S., Zhang, G., Wu, D., Jia, L., Zhang, Y., Geng, Y., Liu, Y., Ren, W., & Zhang, W. (2023). High Signal-to-Noise Ratio MEMS Noise Listener for Ship Noise Detection. Remote Sensing, 15(3), 777. https://doi.org/10.3390/rs15030777