
High-Resolution Imaging of Radiation Brightness Temperature Obtained by Drone-Borne Microwave Radiometer




Abstract
:1. Introduction
2. Materials and Methods
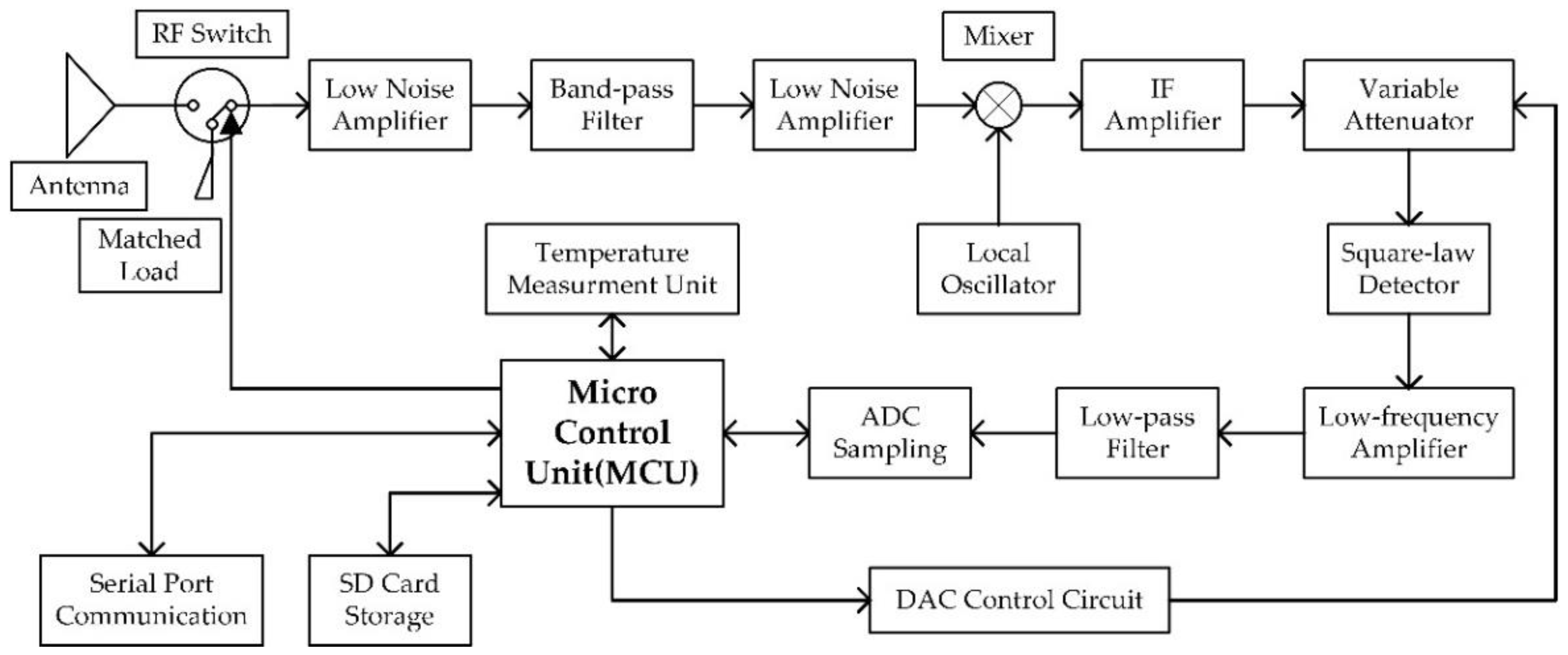
2.1. Drone-Borne Passive Microwave Observation System
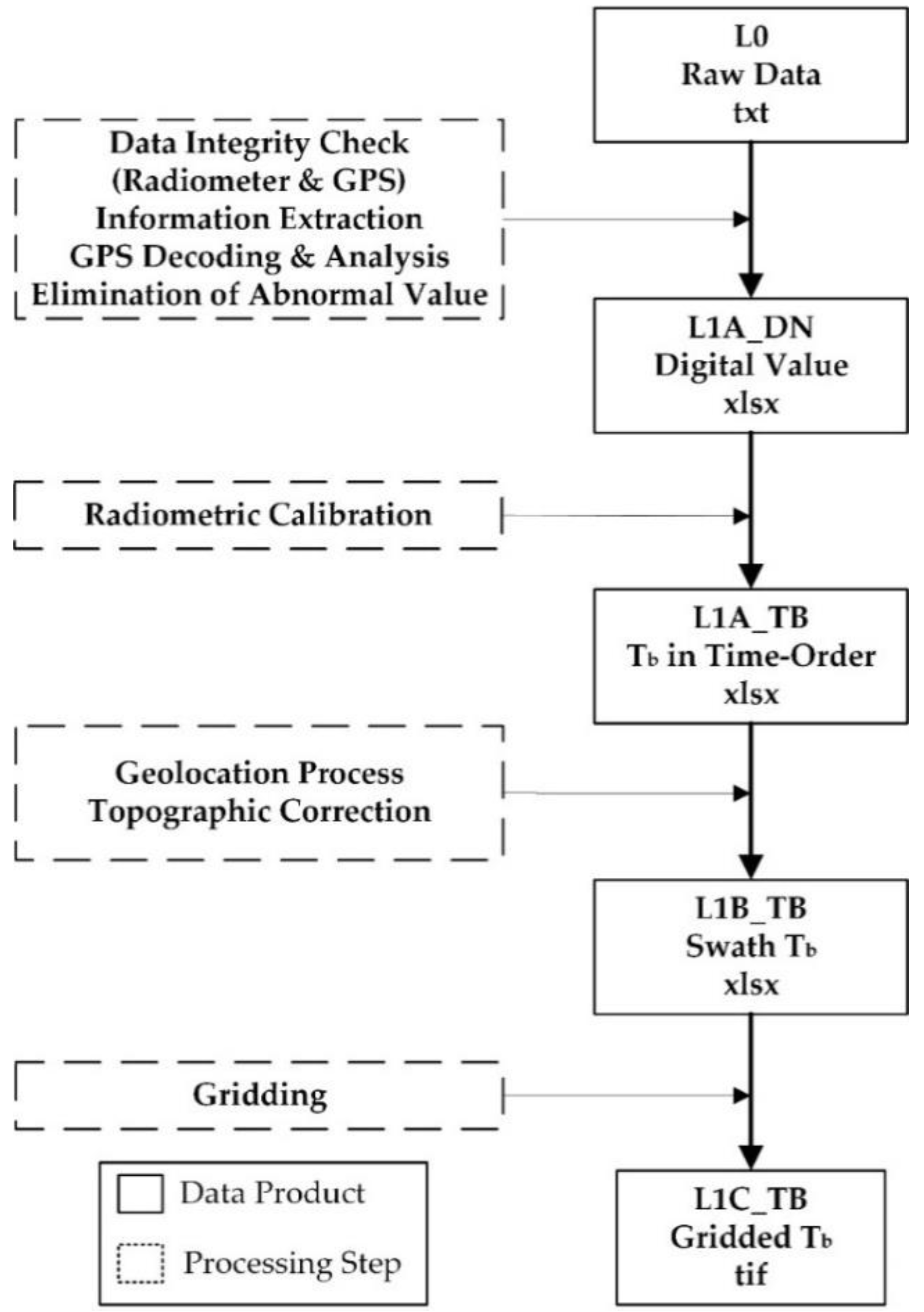
2.2. Data Processing Method
2.2.1. Data Extraction
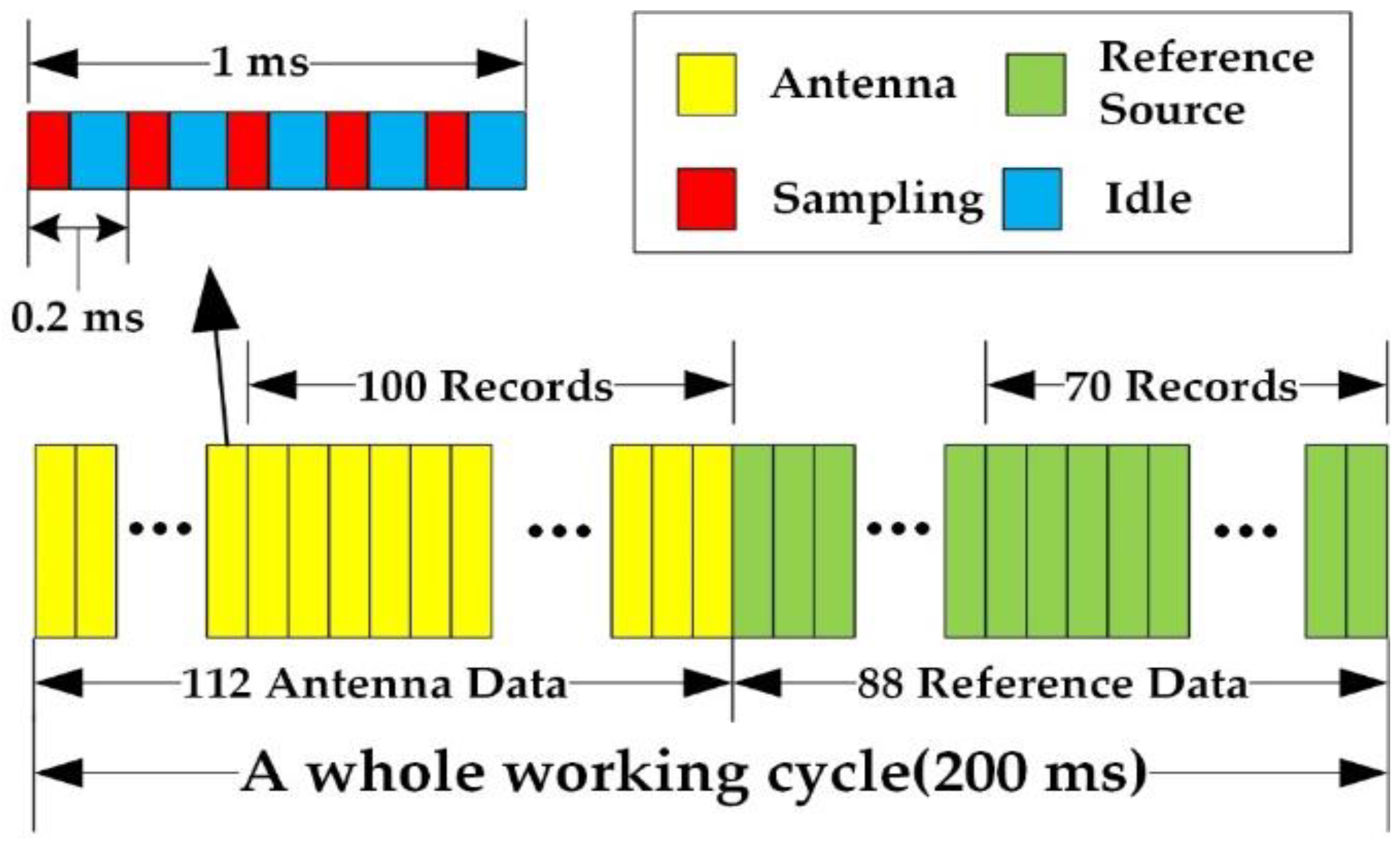
2.2.2. Data Selection
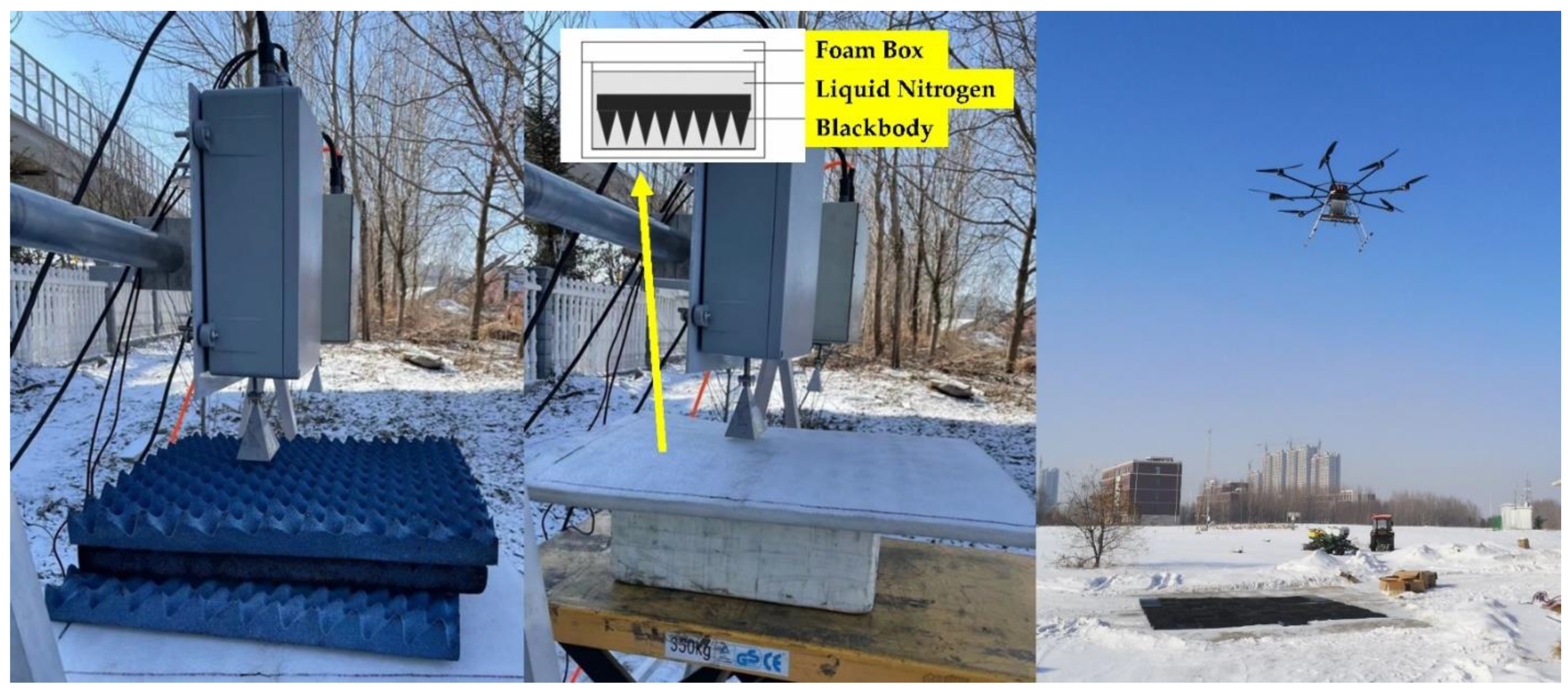
2.2.3. Radiometric Calibration
2.2.4. GPS Interpolation
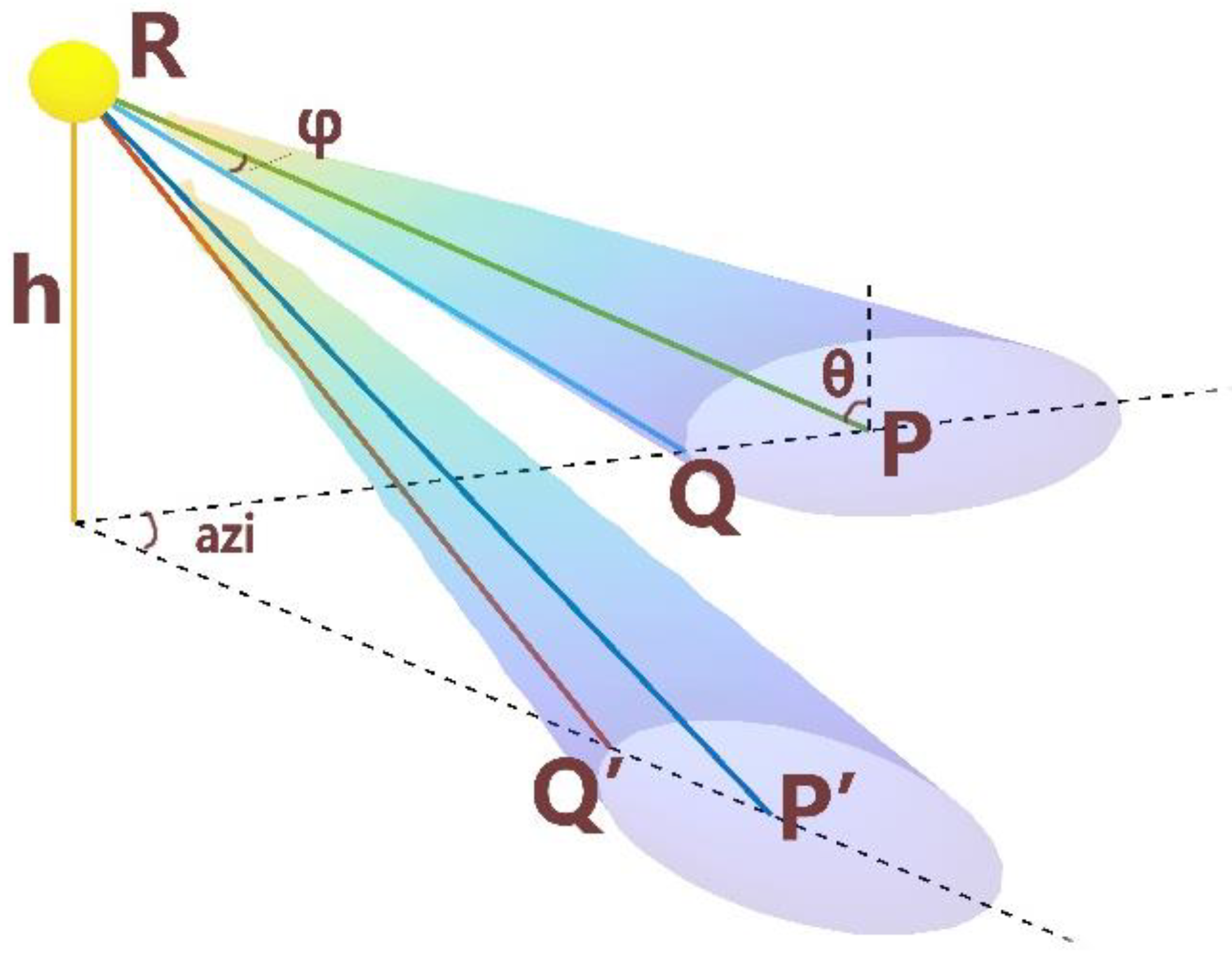
2.2.5. Data Space Projection
The Functional Equation of the Main Beam and the FOV
Center Beam Projection of Drone-Borne Microwave Radiometer
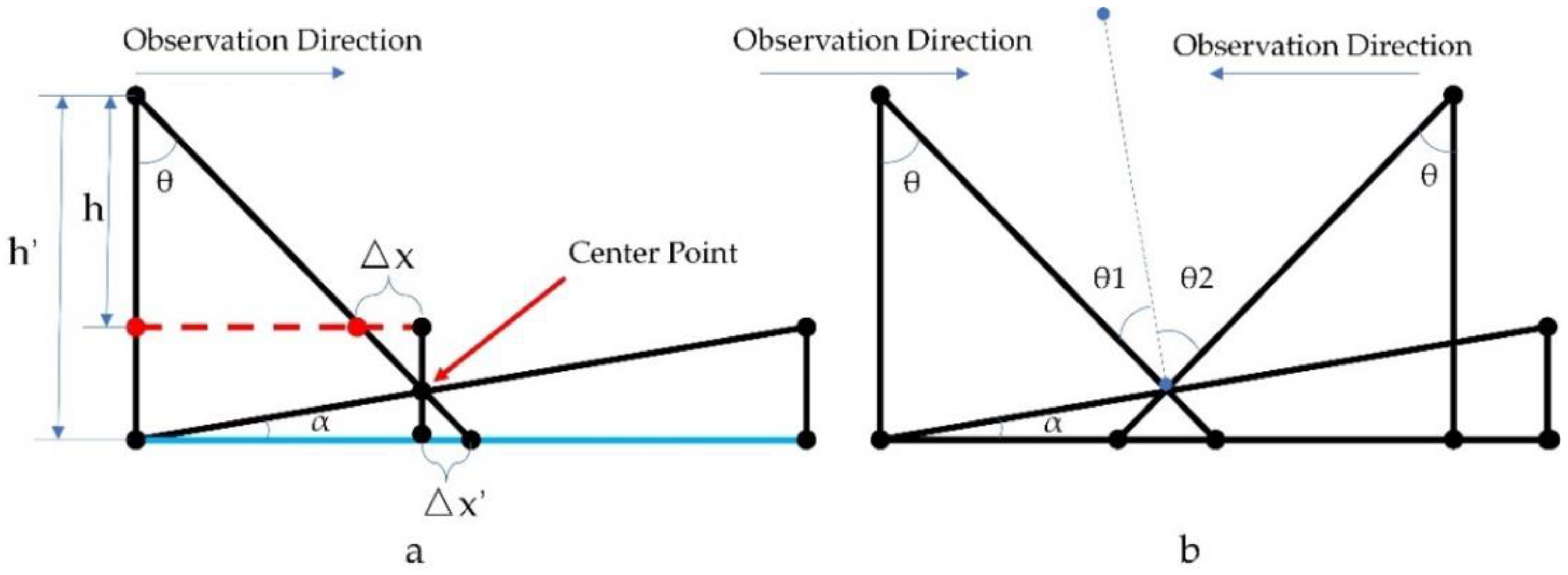
Influence from Terrain Slope and Aspect
The Projection Process
- (1)
- Resampling the DSM and establishing the coordinate system
- (2)
- Analytic linear equation of the main beam
- (3)
- Finding the intersection point of the main beam and the observation surface
- (4)
- The partial slope functional equation was established to calculate the slope and aspect.
- (5)
- Incidence angle correction
2.2.6. Gridding
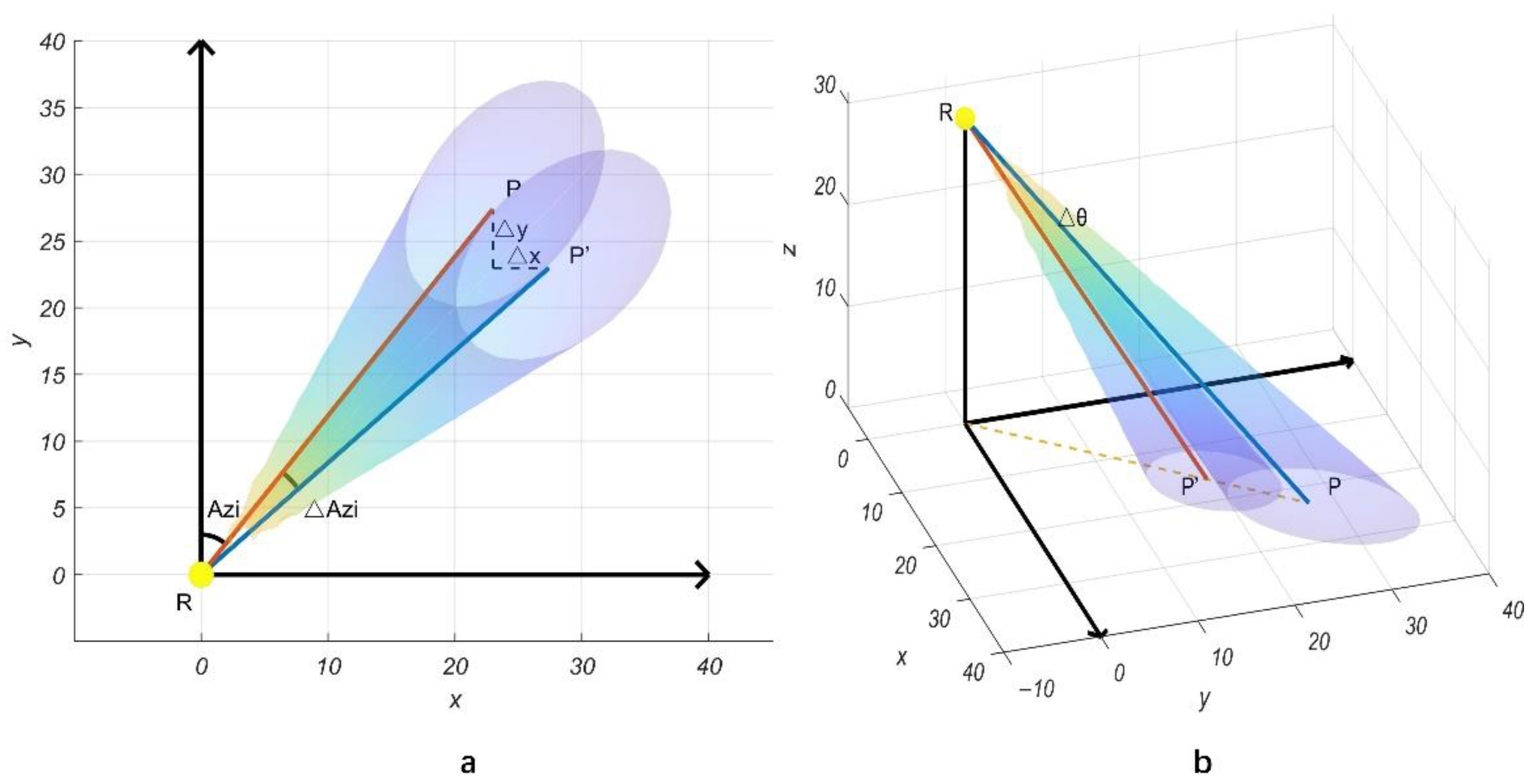
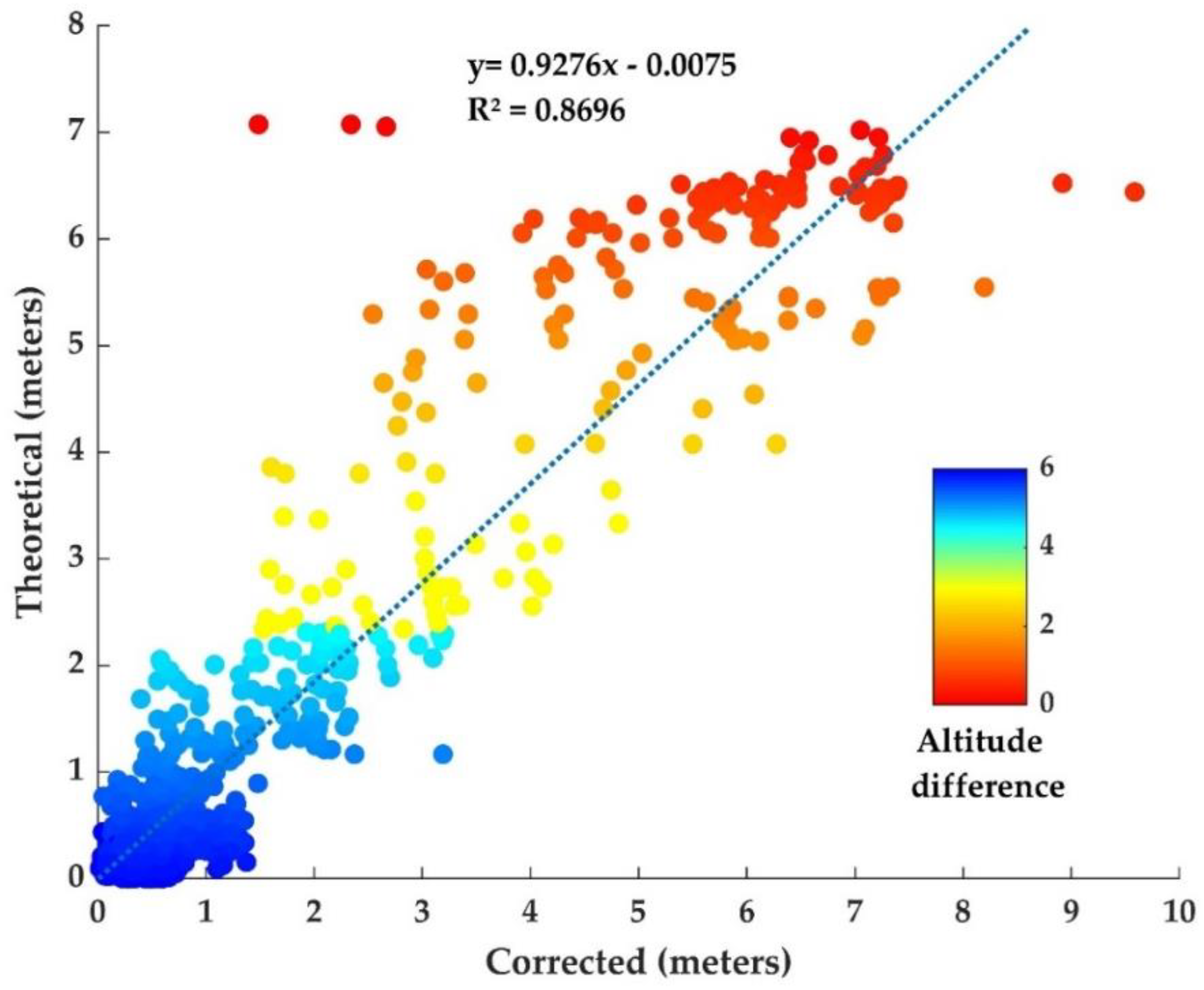
2.3. Error Analysis of Geolocation Process
3. Experiments, Results, and Discussion
3.1. Radiometer Characterization
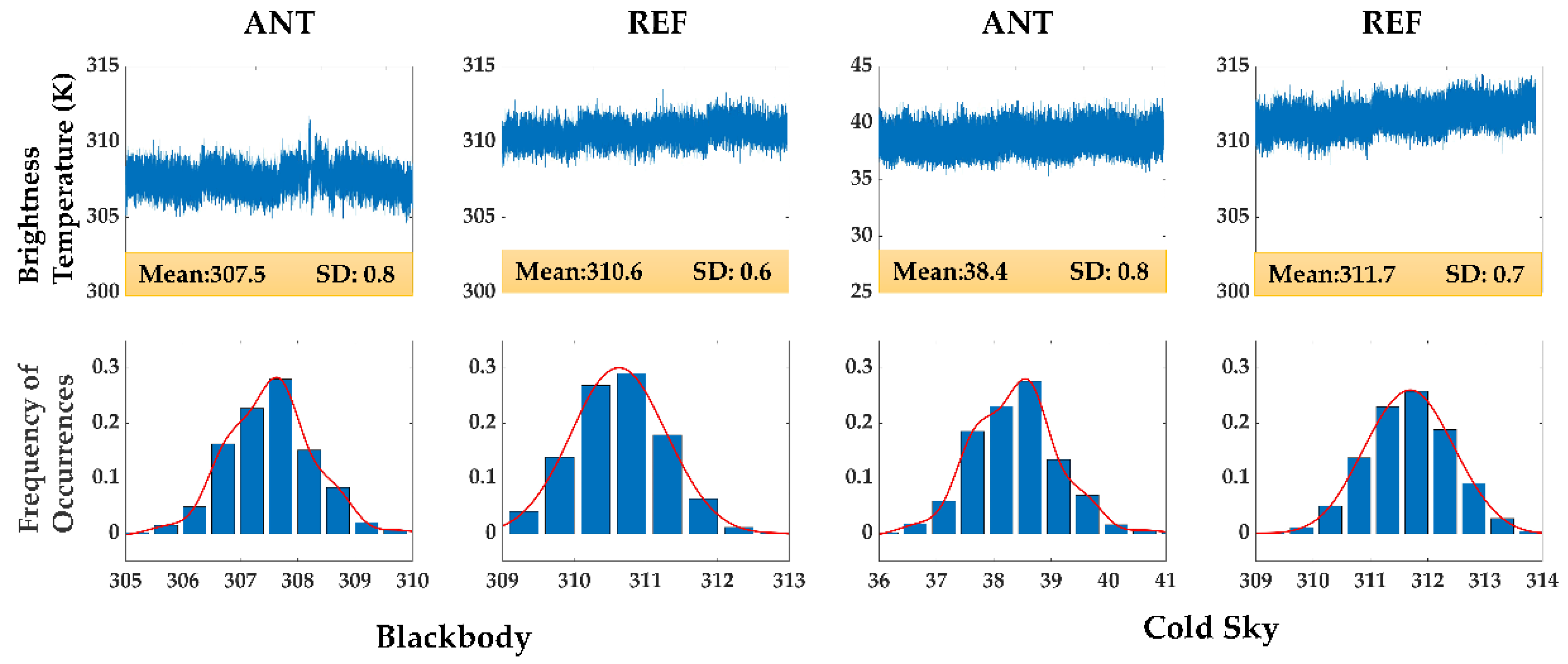
3.1.1. Ground-Based Test of Dynamic Range and Stability of Microwave Radiometer
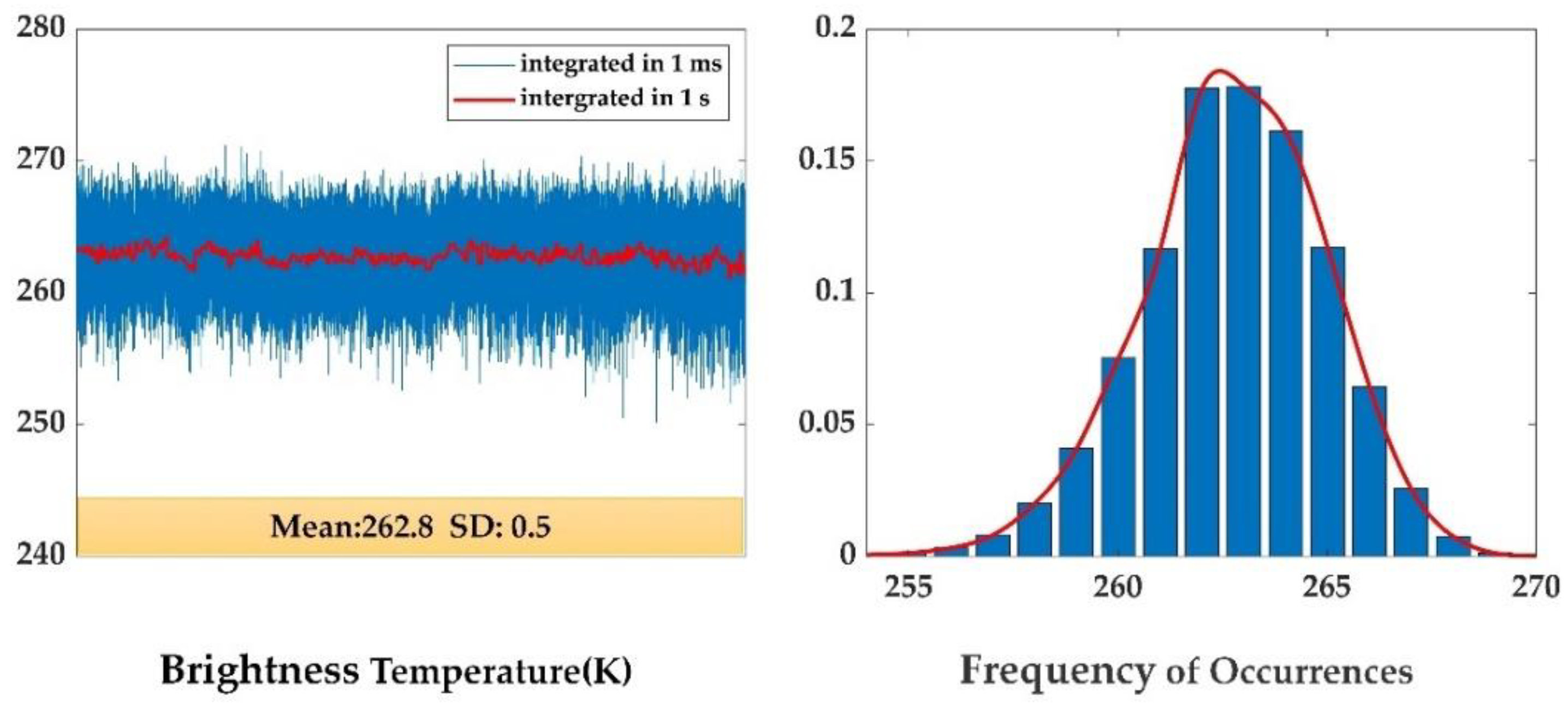
3.1.2. Flight Test of Drone-Borne Radiometer Dynamic Range and Stability
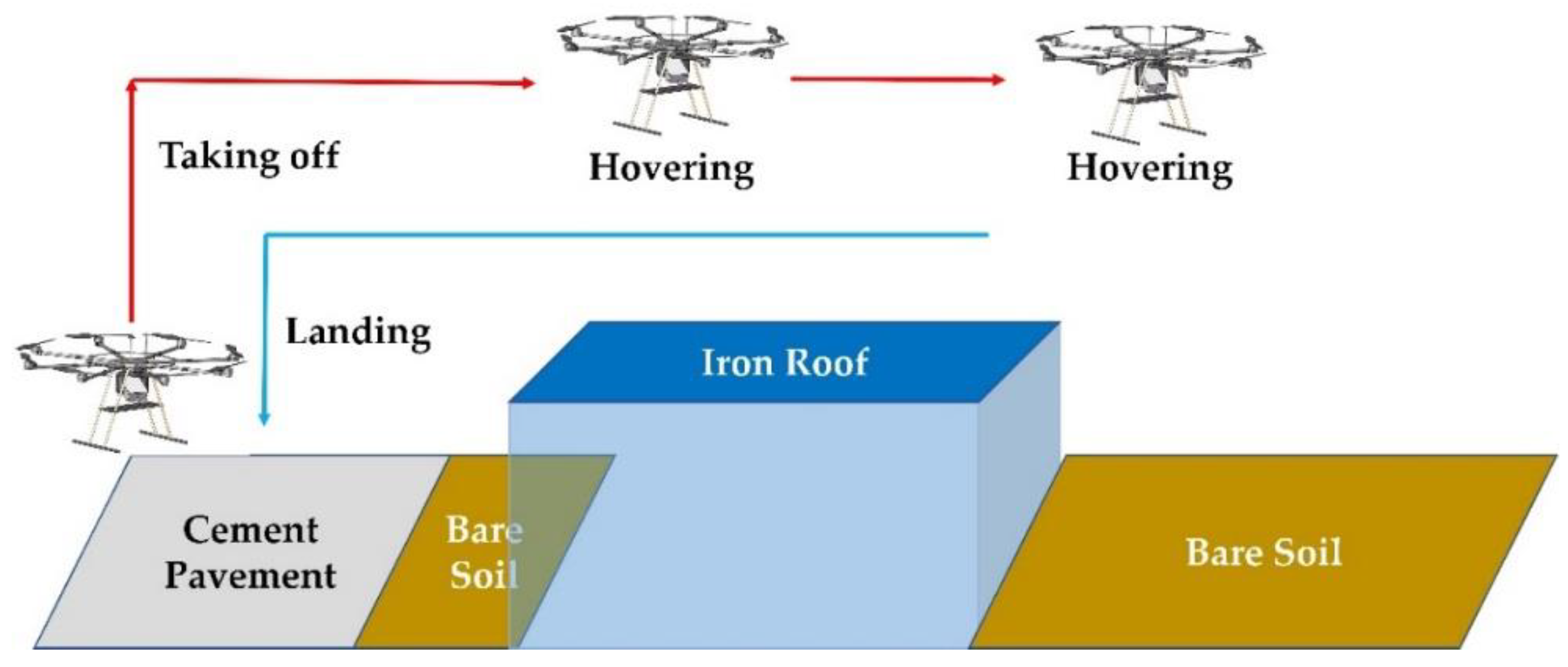
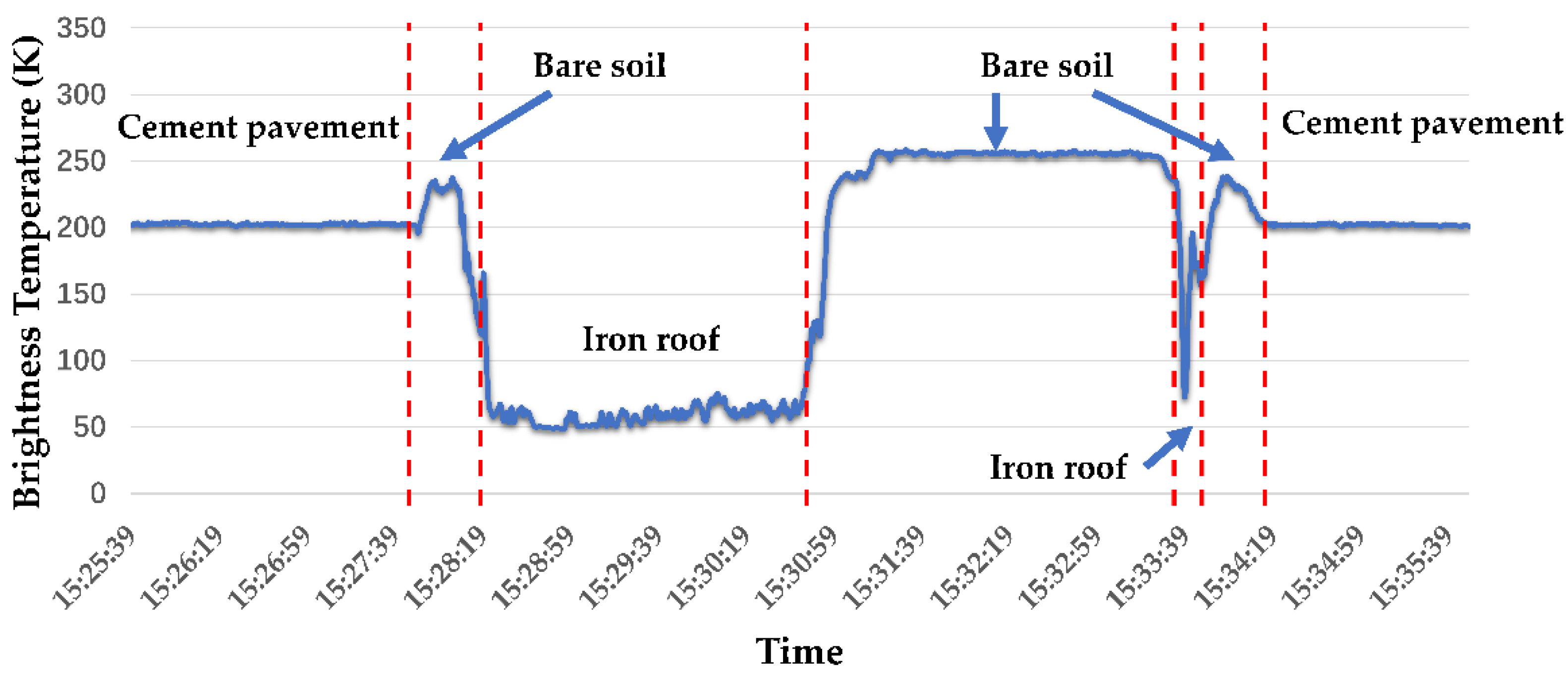
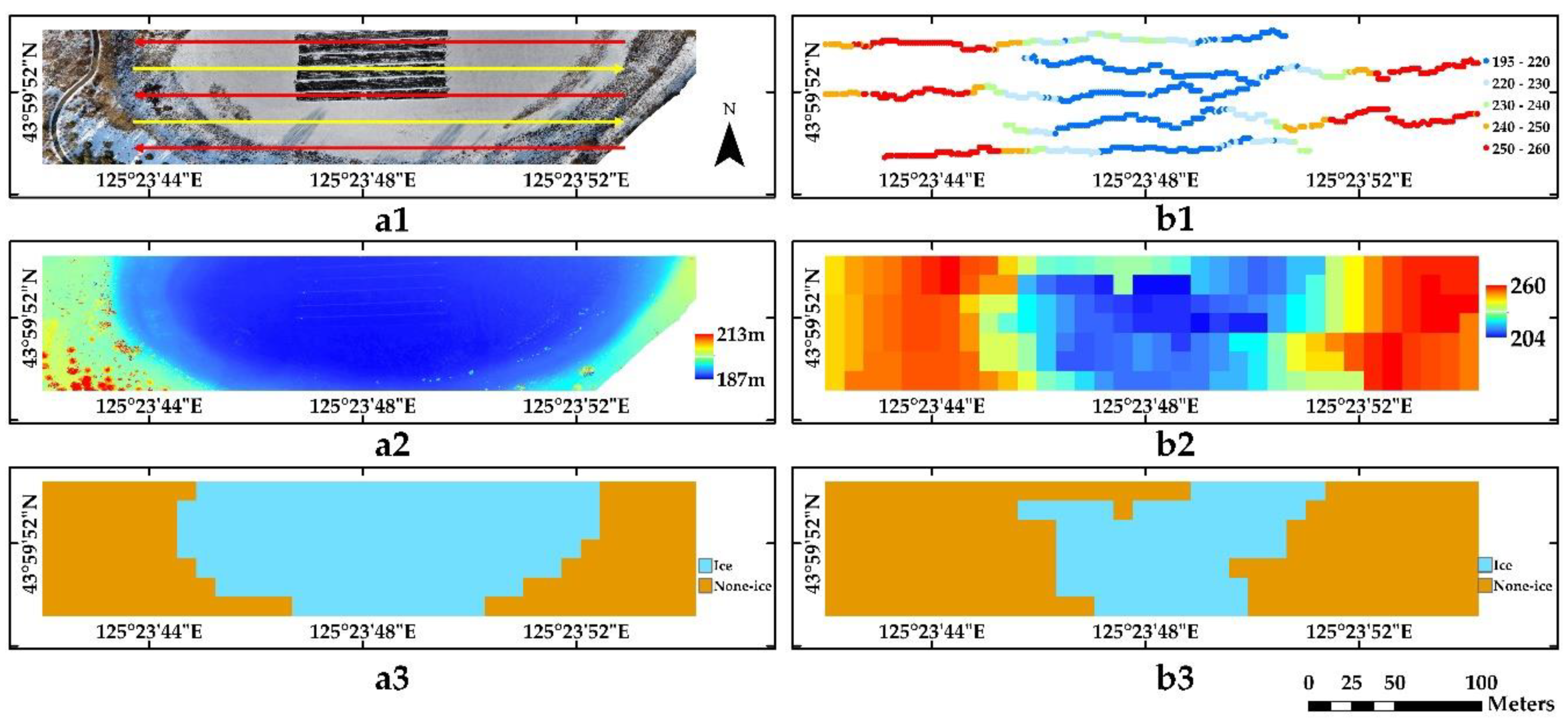
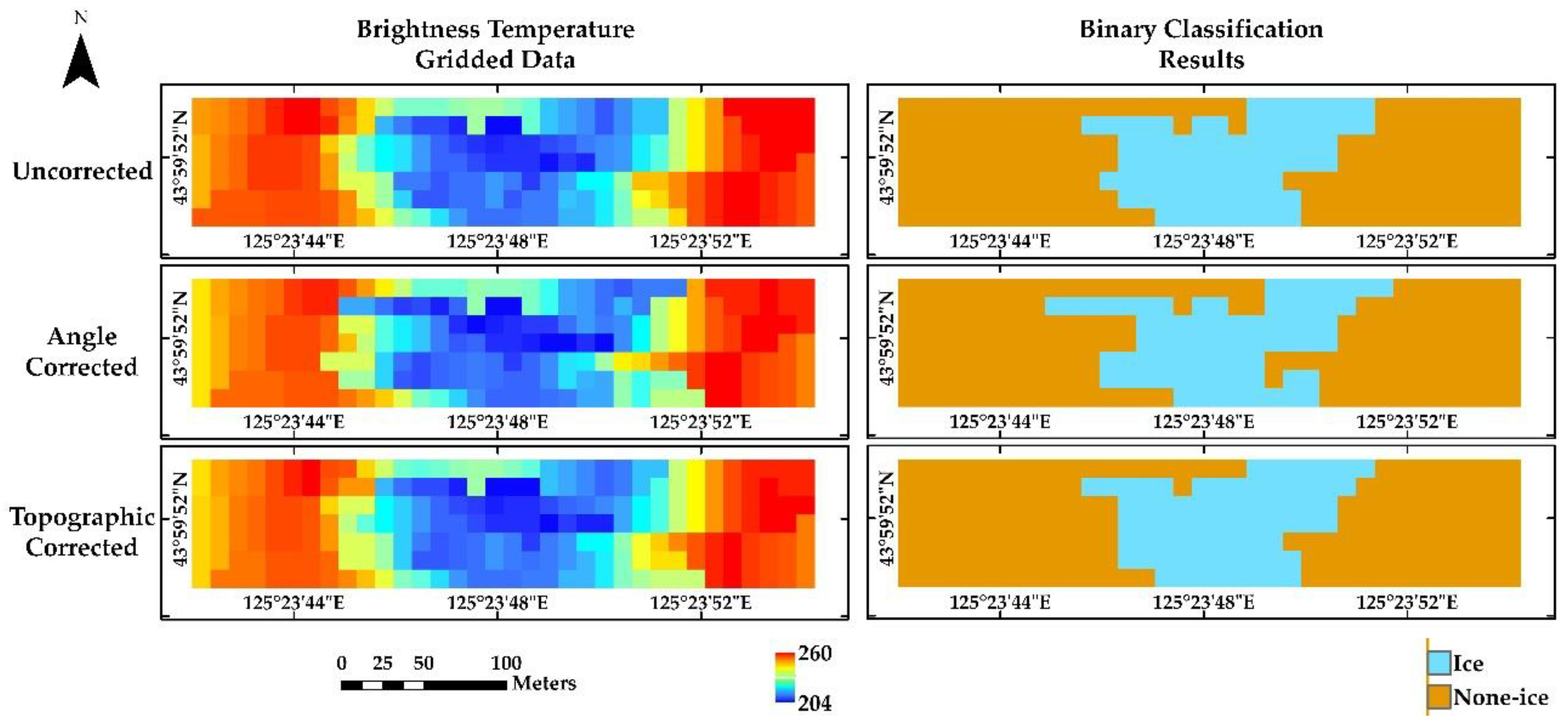
3.2. Flight Experiment with Complex Terrain Observation Target
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| AGC | Automatic Gain Compensation |
| TB | Brightness Temperature |
| UAV | Unmanned Aerial Vehicles |
| MCU | Micro Control Unit |
| IMU | Inertial Measurement Unit |
| GPS | Global Positioning System |
| SD | Secure Digital |
| DC | Direct Current |
| DCDC | Direct Current to Direct Current |
| AD | Analogue to Digital Conversion |
| SPI | Serial Peripheral Interface |
| FOV | Field Of View |
| DSM | Digital Surface Model |
Appendix A
Appendix B
Appendix C
Appendix D
References
- Jiang, T. Research on Suppression Method of Electromagnetic Interference Based on L-Band Microwave Radiometer with Digital Gain Automatic Compensation. Ph.D. Thesis, University of Chinese Academy of Sciences, Beijing, China, 2019. [Google Scholar]
- Zhao, K.; Zhang, J. High Spatial Resolution and High Sensitivity Microwave Radiometer Study. Remote Sens. Technol. Appl. 1991, 3, 7–13. [Google Scholar]
- Wei, J.; Shi, Y.; Ren, Y.; Li, Q.; Qiao, Z.; Cao, J.; Ayantobo, O.O.; Yin, J.; Wang, G. Application of Ground-Based Microwave Radiometer in Retrieving Meteorological Characteristics of Tibet Plateau. Remote Sens. 2021, 13, 2527. [Google Scholar] [CrossRef]
- Kawanishi, T.; Sezai, T.; Ito, Y.; Imaoka, K.; Takeshima, T.; Ishido, Y.; Shibata, A.; Miura, M.; Inahata, H.; Spencer, R.W. The Advanced Microwave Scanning Radiometer for the Earth Observing System (AMSR-E), NASDA’s contribution to the EOS for global energy and water cycle studies. IEEE Trans. Geosci. Remote Sens. 2003, 41, 184–194. [Google Scholar] [CrossRef]
- Ma, C.; Li, X.; Wei, L.; Wang, W. Multi-Scale Validation of SMAP Soil Moisture Products over Cold and Arid Regions in Northwestern China Using Distributed Ground Observation Data. Remote Sens. 2017, 9, 327. [Google Scholar] [CrossRef]
- Nishar, A.; Richards, S.; Breen, D.; Robertson, J.; Breen, B. Thermal infrared imaging of geothermal environments and by an unmanned aerial vehicle (UAV): A case study of the Wairakei—Tauhara geothermal field, Taupo, New Zealand. J. Unmanned Veh. Syst. 2016, 4, 1256–1264. [Google Scholar] [CrossRef]
- Wei, Y.; Li, X.; Gu, L.; Zheng, X.; Jiang, T.; Li, X.; Wan, X. A Dynamic Snow Depth Inversion Algorithm Derived From AMSR2 Passive Microwave Brightness Temperature Data and Snow Characteristics in Northeast China. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2021, 14, 5123–5136. [Google Scholar] [CrossRef]
- Wei, Y.; Li, X.; Gu, L.; Zheng, X.; Jiang, T.; Zheng, Z. A Fine-Resolution Snow Depth Retrieval Algorithm From Enhanced-Resolution Passive Microwave Brightness Temperature Using Machine Learning in Northeast China. IEEE Geosci. Remote Sens. Lett. 2022, 19, 1–5. [Google Scholar] [CrossRef]
- Ruan, Y.; Qiu, Y.; Yu, X.; Guo, H.; Cheng, B. Passive microwave remote sensing of lake freeze-thaw over High Mountain Asia. In Proceedings of the 2016 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Beijing, China, 10–15 July 2016. [Google Scholar] [CrossRef]
- Wang, G.; Li, X.; Wang, J.; Wei, Y.; Zheng, X.; Jiang, T.; Chen, X.; Wan, X.; Wang, Y. Development of a Pixel-Wise Forest Transmissivity Model at Frequencies of 19 GHz and 37 GHz for Snow Depth Inversion in Northeast China. Remote Sens. 2022, 14, 5483. [Google Scholar] [CrossRef]
- Sun, H.; Zhao, K. Study of Noise Coupled Digital Auto-Gain Compensative Microwave Radiometer. J. Beijing Univ. Posts Telecommun. 2007, 5, 104. [Google Scholar] [CrossRef]
- Luan, H.; Zhao, K. Temperature Character Analysis and Compensative Techique for Digital Auto Gain Compensative Microwave Radiometer. J. Jilin. Univ. 2008, 46, 515–519. [Google Scholar] [CrossRef]
- Wan, X.; Li, X.; Jiang, T.; Zheng, X.; Li, X.; Li, L. A Fast Storage Method for Drone-Borne Passive Microwave Radiation Measurement. Sensors 2021, 21, 6767. [Google Scholar] [CrossRef] [PubMed]
- Zhu, L. Research on the Design and Control of Water-air Amphibious Unmanned Vehicle Based on Rotor Drive. Master’s Thesis, Jiangsu University of Science and Technology, Zhenjiang, China, 2021. [Google Scholar]
- Luan, H.; Zhao, K. Error Analysis and Accuracy Validation of Two-Point Calibration For Microwave Radiometer Receiver. J. Infrared Millim. 2007, 26, 289–292. [Google Scholar]
- Long, D.; Brodzik, M. Optimum Image Formation for Spaceborne Microwave Radiometer Products. IEEE Trans. Geosci. Remote Sens. 2016, 54, 2763–2779. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- AMSR-E/Aqua Daily EASE-Grid Brightness Temperatures, Version 1. Available online: https://catalog.data.gov/dataset/amsr-e-aqua-daily-ease-grid-brightness-temperatures-version-1 (accessed on 3 November 2022).

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Unmanned Aerial Vehicle | Manned Aircraft | |
|---|---|---|
| Endurance Time | Shorter, 10 to 30 min | Longer, several hours |
| Flight Altitude | 5 to 500 m | More than 3000 m |
| Flight Speed | Slower, controllable | Faster, unable to fly at low speed |
| Spatial Resolution | Higher, according to flight altitude | Relatively lower |
| Advantages | Economical, high timeliness, high spatial resolution, able to hover | Large observation coverage |
| Disadvantages | Short endurance, small observation coverage, limited by load | Low spatial resolution, high price, limited application route |
| Center Frequency | 18.7 ± 0.4 GHz | IF Bandwidth | 400 MHz |
| Sensitivity | ≤0.2K | Stability | 1K |
| RF Switch Rate | 200 ms | Weight | 8Kg |
| Power Consumption | 30 W | Size (cm × cm × cm) | 37 × 27 × 12 |
| Front End Gain | 50 dB | IF Gain | 45 dB |
| Variable Attenuation | 0~30 dB | Switch Insertion Loss | 3.2 dB |
| Antenna Gain | 20 dB | 3 dB Beam Width | 15° |
| Product | Description | Format | |
|---|---|---|---|
| L0 | Raw Data Stored by Radiometer | txt | Instrument Data |
| L1A_DN | Radiometer Digital Value in Time-Order | xlsx | |
| L1A_TB | Radiometer TB in Time-Order | xlsx | |
| L1B | Swath Radiometer TB after Space Projection | xlsx | |
| L1C | Gridded Radiometer TB | tif |
| Name | Description | Expression Form |
|---|---|---|
| Pospro | Position of projection point | Longitude, latitude |
| RangeFOV | Range of FOV | Functional equation of ellipse |
| Incicor | Corrected incidence angle | Incidence angle |
| Azicor | Corrected azimuth angle | Azimuth angle |
| PosUAV | Position of UAV | Longitude, latitude, altitude |
| OriUAV | Orientation of UAV | Azimuth angle, yaw, pitch, roll |
| OriDMR | Orientation of drone-borne microwave radiometer | Incidence angle of the antenna |
| Topo | Topography | Points cloud of longitude, latitude, altitude |
| Error | Measurement error of position and orientation | Longitude, latitude, altitude, angles |
| Azimuth Changes | Incident Changes | ||||
|---|---|---|---|---|---|
| Azimuth Offset △Azi | Horizontal Offset △x | Vertical Offset △y | Incident Offset △θ (with Lean Back θ > 0) | Long Axis of FOV Offset | Projection Point Offset (Along the Flight Direction) |
| 0 | 0.0 | 0.0 | 0 | 0.0 | 0.0 |
| 1 | 0.5 | −0.4 | 1 | 0.9 | 1.3 |
| 2 | 0.9 | −0.8 | 2 | 1.8 | 2.6 |
| 3 | 1.4 | −1.2 | 3 | 2.9 | 4.1 |
| 4 | 1.9 | −1.7 | −1 | −0.8 | −1.2 |
| 5 | 2.3 | −2.1 | −2 | −1.6 | −2.4 |
| 6 | 2.7 | −2.6 | −3 | −2.3 | −3.6 |
| 7 | 3.2 | −3.0 | −4 | −2.9 | −4.7 |
| 8 | 3.6 | −3.5 | −5 | −3.5 | −5.8 |
| 9 | 4.0 | −3.9 | −6 | −4.1 | −6.8 |
| 10 | 4.4 | −4.4 | −7 | −4.6 | −7.8 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wan, X.; Li, X.; Jiang, T.; Zheng, X.; Li, L.; Wang, X. High-Resolution Imaging of Radiation Brightness Temperature Obtained by Drone-Borne Microwave Radiometer. Remote Sens. 2023, 15, 832. https://doi.org/10.3390/rs15030832
Wan X, Li X, Jiang T, Zheng X, Li L, Wang X. High-Resolution Imaging of Radiation Brightness Temperature Obtained by Drone-Borne Microwave Radiometer. Remote Sensing. 2023; 15(3):832. https://doi.org/10.3390/rs15030832
Chicago/Turabian StyleWan, Xiangkun, Xiaofeng Li, Tao Jiang, Xingming Zheng, Lei Li, and Xigang Wang. 2023. "High-Resolution Imaging of Radiation Brightness Temperature Obtained by Drone-Borne Microwave Radiometer" Remote Sensing 15, no. 3: 832. https://doi.org/10.3390/rs15030832
APA StyleWan, X., Li, X., Jiang, T., Zheng, X., Li, L., & Wang, X. (2023). High-Resolution Imaging of Radiation Brightness Temperature Obtained by Drone-Borne Microwave Radiometer. Remote Sensing, 15(3), 832. https://doi.org/10.3390/rs15030832