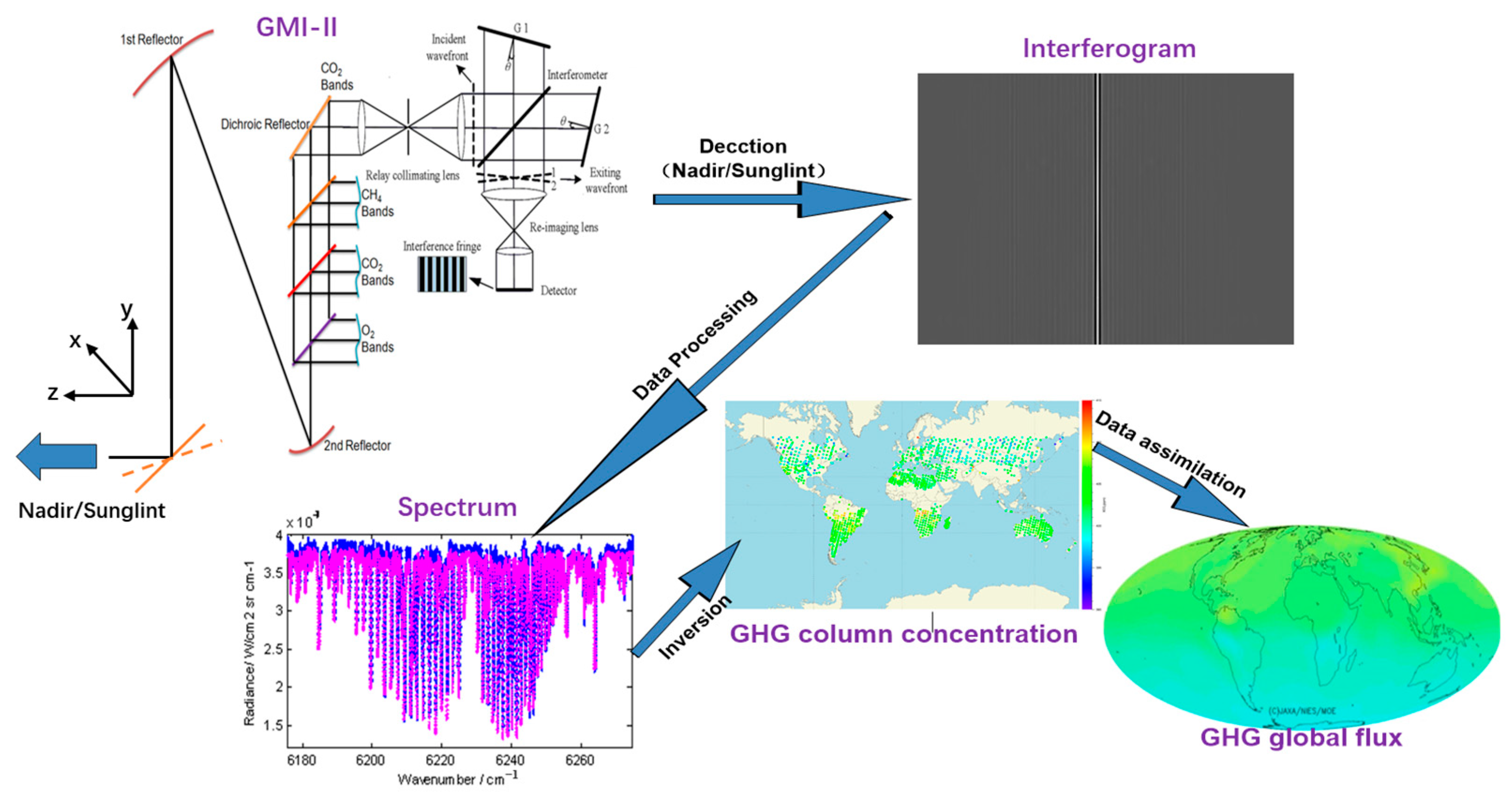
2.1. Detection Principle of the GMI
The GMI-II receives surface-reflected radiance, and the column concentration of GHG can be retrieved through the absorption spectrum. Similar to other carbon monitors, the GMI-II, designed with four spectral channels, selects visible and near-infrared (NIR) spectral regions as remote sensing spectral bands [
28,
29,
30,
31]. The selection basis and functions of each spectral channel are as follows.
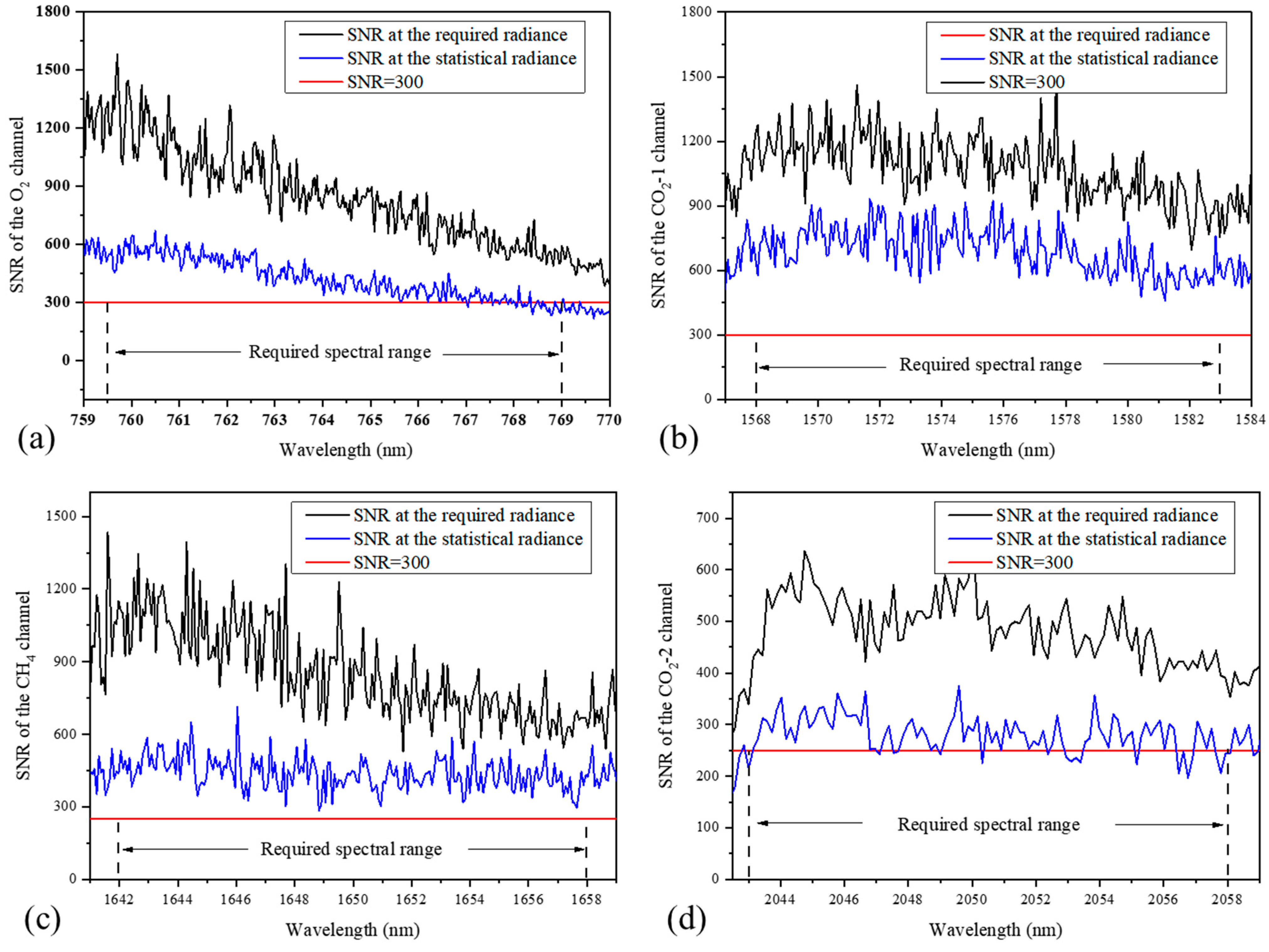
Band 1: O2 auxiliary observation channel (759–769 nm) is used to constrain the total atmospheric pressure of the surface, correct the systematic error of surface pressure, and also be used for cloud judgment and estimation of multiple scattering effects of aerosol under complex pollution conditions;
Band 4: CO2-1 channel (1568–1583 nm), the CO2 weak absorption spectrum sensitive to concentration changes and fewer disturbing gases, used for inversion CO2 column concentration in near-surface and troposphere;
Band 3: CH4 channel (1642–1658 nm), which is sensitive to CH4 concentration changes and has fewer disturbing gases, is used to invert CH4 column concentration;
Band 2: CO2-2 channel (2043–2058 nm), the CO2 strong absorption spectrum, is weakly dependent on CO2 concentration but sensitive to clouds and aerosols, synergistically correcting for the influence of ice clouds and aerosol scattering features on XCO2 and XCH4 in the NIR band during observations.
The detection principle of the GMI-II is illustrated in
Figure 1. Firstly, the interferograms of four channels are directly obtained by the GMI-II, and the observed spectral curves are obtained by interference data processing. Then combines auxiliary parameters such as atmospheric conditions, surface characteristics and other information to produce GHG column concentration data products and carry out error analysis. Finally, the GMI-II produces GHG global flux data products after mapping and averaging [
32].
The main specifications of the GMI-II are shown in
Table 1. The observation mode of the GMI-II is divided into the Nadir and Sun-glint modes. In the Nadir mode, the instantaneous spatial resolution is 10.3 km, and the width is realised by the rail-crossing point method of a two-dimensional tracking mirror. The four working modes are one point, five points, seven points, and nine points. The default working mode is five points, and the sampling point spacing is 100 km. In the Sun-glint mode, Sun-glint can be tracked autonomously according to solar azimuth, satellite attitude and other parameters. Nadir pointing accuracy and Sun-glint tracking accuracy of the two-dimensional tracking mirror are better than ± 0.1°.
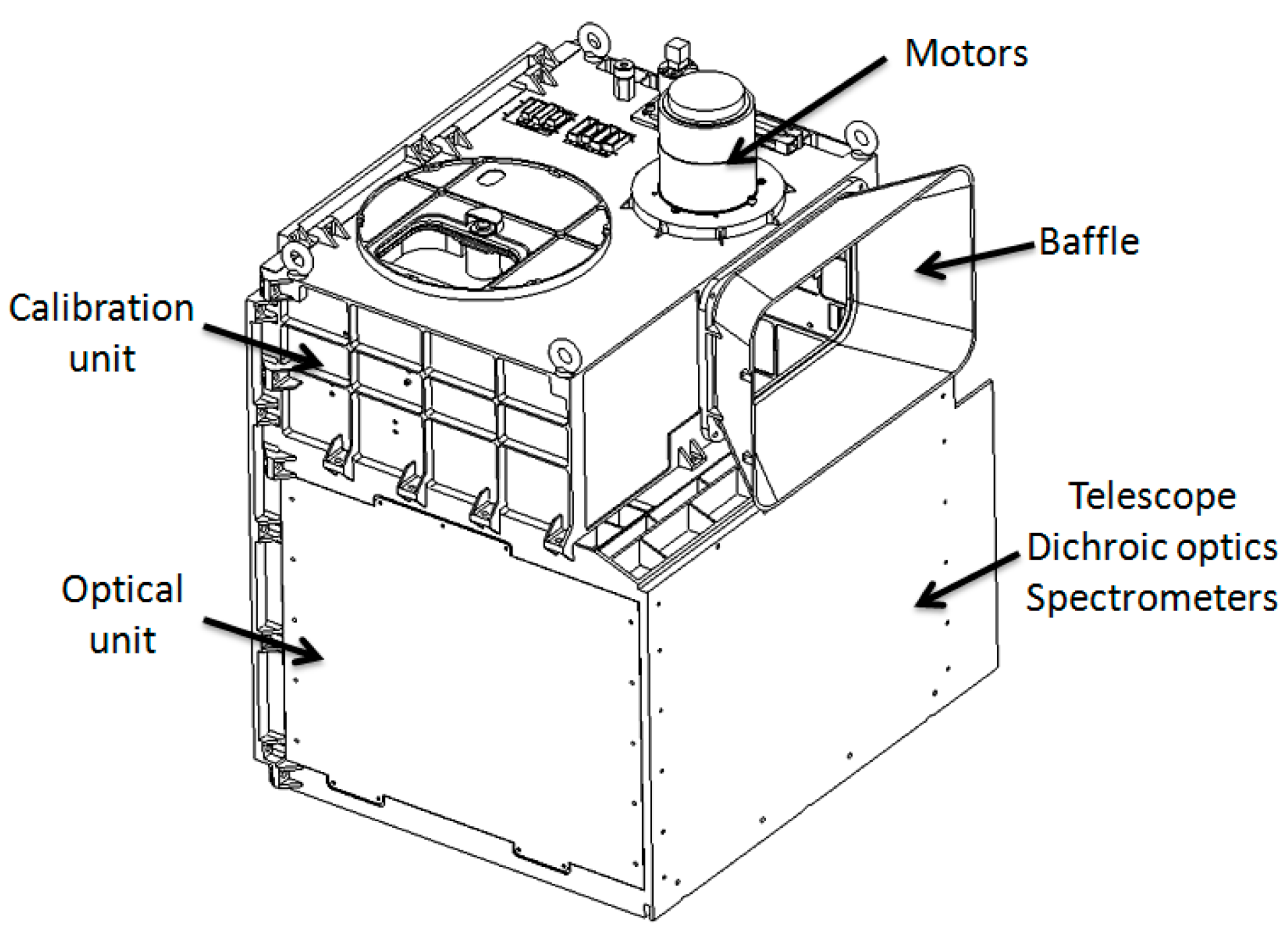
According to the function and performance requirements in
Table 1, the GMI-II consists of the primary optics machine unit and calibration unit, as shown in
Figure 2. The calibration unit mainly includes the 2D tracking mirror, calibration gate, light trap, diffuse reflector plate, and radiometer [
33]. On the one hand, the 2D tracking mirror brings the sunlight into the instrument via a calibrated optical path to monitor changes in the instrument’s response in orbit. On the other hand, it enables wide-area spatial sampling by scanning along the track and cross-track. The primary optics machine unit is divided into five parts: telescope system, dichroic reflector module, collimation relay system, SHS, and secondary imaging system. The incident light is reflected by the 2D tracking mirror and enters the Gregory reflector telescope. Then the beam diameter is compressed and enters the dichroic reflectors. It is divided into four bands, and the SHS modulates the incident light of each band. The secondary imaging system images the interferogram to a CCD detector (759~769 nm band), a HgCdTe (MCT) detector (2043~2058 nm band), and two InGaAs detectors (1568~1583 nm, 1642~1658 nm band).
2.2. Optical Design of Telescope System and Collimation Relay System
According to the performance of the application requirements (spatial resolution, spectral resolution, spectral range, SNR, and others), specifications and performance of the selected detector (pixel size, pixel number, sensitivity, spectral response, and others) and constraints on resources provided by the satellite platform (volume, weight), the optical system scheme and design parameters (aperture, field of view (FOV) angle, spectral response) of the GMI-II are determined by a comprehensive engineering trade-off.
The primary optical system of the GMI-II is divided into five parts, whose functions are as follows.
The telescope system, composed of the Gregorian off-axis telescoping system, gathers radiation information of surface reflection and atmospheric scattering of the spatial resolution element. The FOV angle of the telescope system, which is 14.6 mrad, is determined by the 708.45 km orbit altitude of the satellite, observation mode and corresponding spatial resolution of 10.5 km. The telescope system compresses the optical path with an aperture of 14.6 mrad small FOV and 105 mm large diameter in the clear aperture to reduce the size and weight of subsequent optical paths.
The dichroic reflector component pre-distinguishes the effective spectral range of the four channels.
The collimation relay system collimates the parallel light from the telescope system for a second time to meet the effective clear aperture, FOV and interference wavefront of the interferometer assembly and positions the exit pupil on the grating surface to maximise the illumination uniformity and energy utilisation of the interferogram.
The SHS assembly, composed of ten optical components including a beamsplitter, spacers, field-widened prisms and gratings, combines spatial interference and grating diffraction to modulate light of different wavelengths into interference fringes of different spatial frequencies at the interference localisation plane.
The secondary imaging system requires a specific scaling ratio in the grating dispersion direction, i.e., the image size of the interferometric localisation plane (determined by the spectral resolution and grating groove density) to be scaled in a fixed proportion to the focal plane and requires the energy to be focused on the focal plane as much as possible in the grating groove direction [
34].
The design of the optical system starts from the interferometer assembly, takes the SNR requirement as the premise, and combines the grating groove density that can be obtained and manufactured, spectral resolution, optional detector parameters, and other information to determine the incident FOV and clear aperture of the interferometer assembly for each channel. Then the incident pupil diameter and the zoom ratio of the telescope system are computed, and the second imaging system is designed for each channel.
In the nadir observation mode, the SNR of the instrument is mainly related to the detector performance and optical system design parameters. The SNR is calculated as follows [
35].
where,
is a dark scattering noise, a random noise generated by the detector’s dark current, independent of the signal level and related to the integration time and detector’s operating temperature;
is a readout noise generated during the generation of an electronic signal, independent of both the signal level and detector’s operating temperature, and caused by the detector’s drive design;
the number of photons on each pixel. In addition to the above factors, the SNR of SHS in the spectral domain is also related to the interferometric modulation efficiency, which is generally considered 0.75 or more for monochromatic light [
36].
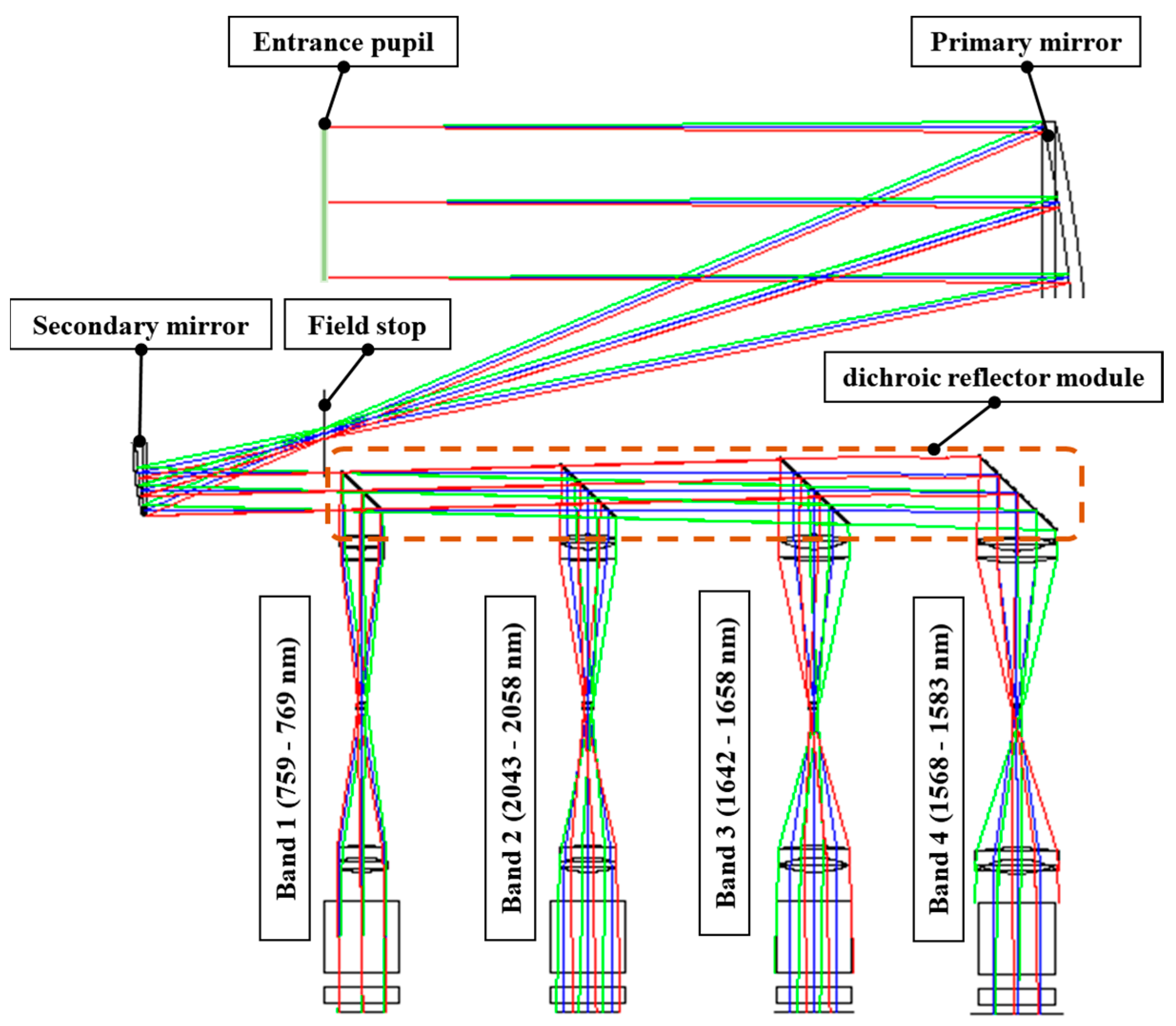
Based on the SNR review and the engineering experience of the preliminary principle prototype development, the interferometer components were pre-designed. Then the detailed design of the front telescope system, four-channel colour separation components and corresponding collimation system optical path were completed, and the front optical path layout is illustrated in
Figure 3. Due to the wide detection band (757 nm to 2043 nm) and small FOV (14.6 mrad), a reflective system was considered, with a Gregorian off-axis telescope system consisting of parabolic and ellipsoidal mirrors without central blocking. The light beam is reflected by each channel’s corresponding dichroic reflector component into the corresponding collimation relay system to avoid achromatic aberrations. At the same time, considering that there are only two surfaces in the reflective optical system, we have used aspherical surfaces to control aberrations. In the design of the telescope system, in order to reduce the machining difficulty of the 2D tracking mirror and consider the necessary space required for the installation and movement of the 2D tracking mirror, we selected the 2D tracking mirror as the instrument entrance pupil to design the front function component of the optical system.
According to the above requirements, the results of the design of the front telescope system are as follows.
The telescopic system with a scaling ratio of 5:1 and an exit pupil diameter of 21 mm;
The spacing between the primary and secondary mirrors is 198 mm, and the off-axis dimensions of the primary and secondary mirrors are 165 mm and 33 mm, respectively, to provide effectively installed space for the field stop, aperture for eliminating stray light and four-channel spectrometers;
The field stop is located at the real image plane of the primary mirror, and the FOV of the four channels are unified through the field stop;
A polariser is installed at the telescope system’s exit pupil to decrease the residual polarisation sensitivity of the GMI-II;
The interferometric localisation planes of the four channels are the conjugate plane of the exit pupil of the telescope system to ensure uniformity of illumination at the interference fringe;
The root means square (RMS) of the exiting wavefront is better than 1/4 wavelength for each channel.
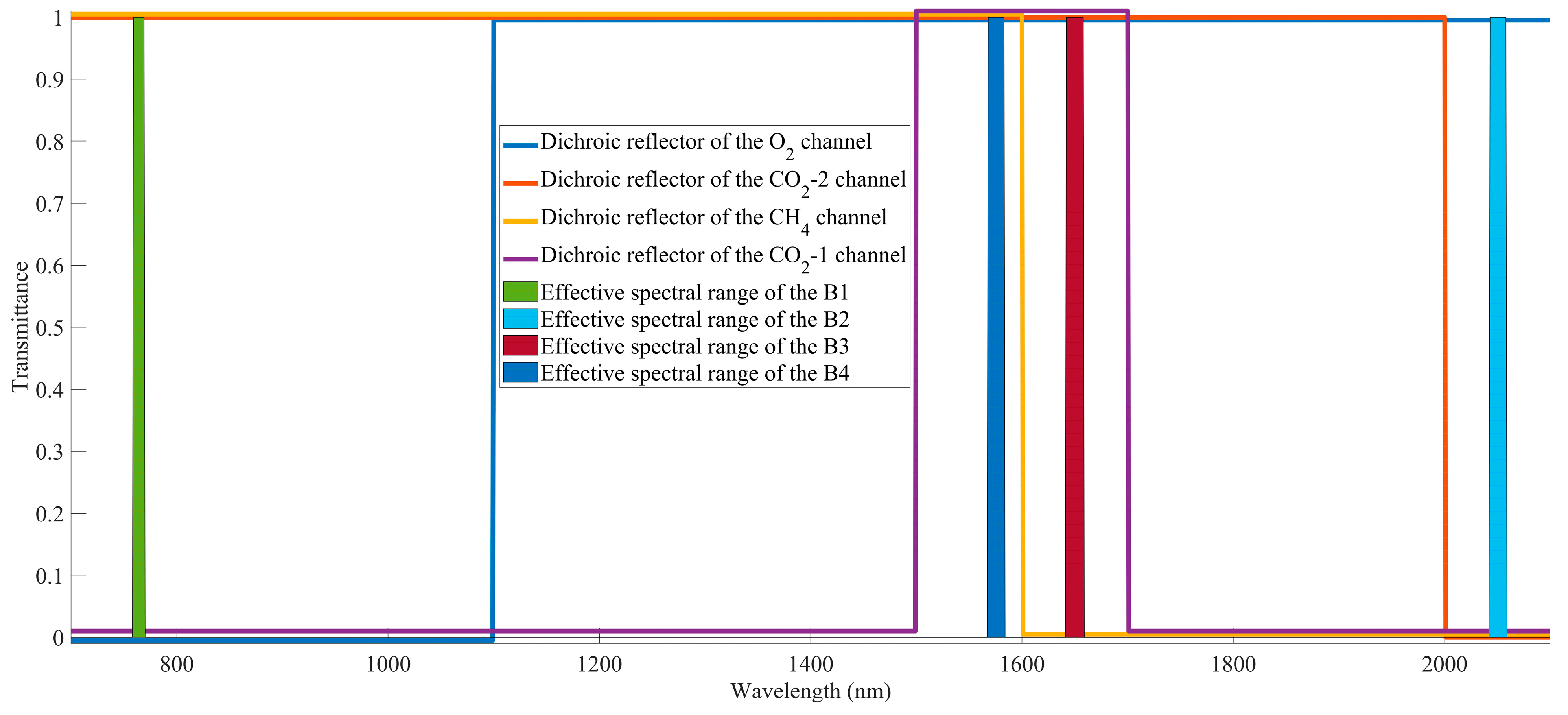
Figure 4 illustrates the distribution of spectral curves of the dichroic reflectors of four channels based on the reflection system’s spectral range (700~2100 nm). The GMI-II does not simply follow a wavelength sequence in its optical layout. First, the light below 1100 nm is reflected by the O
2 channel; then, the 1550–1680 nm light is transmitted by the dichroic reflector of the CO
2-2 channel. The channel layout is to reduce the pressure of the dichroic reflectors of the two adjacent spectral channels, CO
2-1 and CH
4, and to ensure the optical system efficiency of the short-wave infrared (SWIR) CO
2-2 channel as much as possible.
The spacing of the dichroic reflectors determines the installation space of the spectrometers of each channel. It is necessary to consider the compact design of lens components, the driving circuit size of focal plane components and the installation structure of the thermal control module.
2.3. Optical Design of Asymmetric Interferometers
The interferometer assembly is the core module for the main technical specifications, such as spectral range, resolution, and luminous flux, and is the primary starting point for the optical design of the GMI-II. According to the technical index requirements described in
Table 1, the pixel number of available detectors for the three main observation channels cannot simultaneously meet spectral resolution and range requirements. Consequently, the interferometer design with ZOPD offset is carried out for the three main observation channels to solve the difficulties of high spectral resolution, spectral range and sampling ratio to satisfy the technical index requirements simultaneously under the restricted detector pixel number [
37].
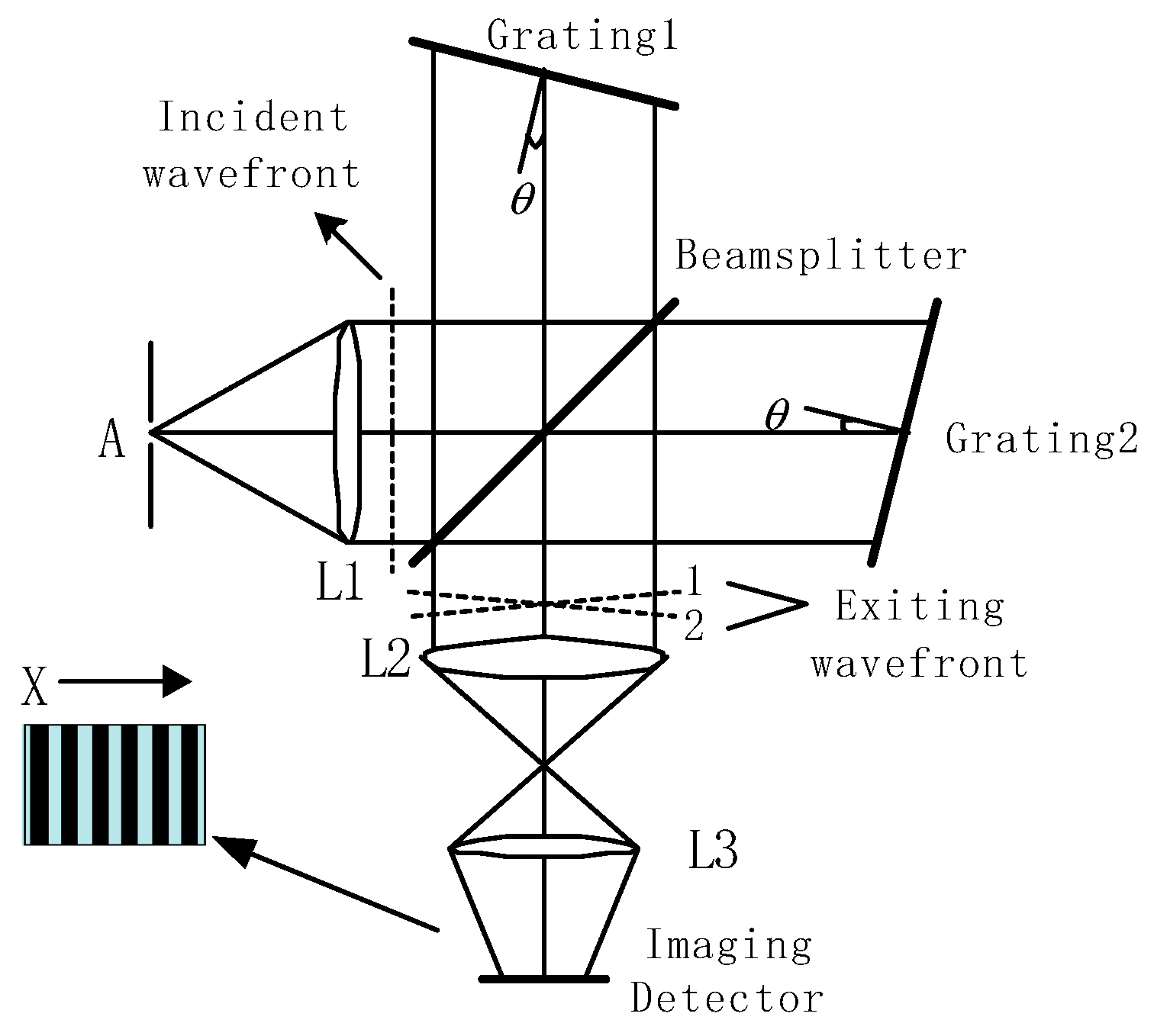
The principle of traditional SHS is illustrated in
Figure 5. The collimating lens transforms the light source or target with a specific FOV into a parallel beam incident to the beamsplitter and then becomes two coherent beams with approximately equal energy. The beams are diffracted by gratings in two arms and are returned to the beamsplitter. Interference fringes are formed on the grating surface, i.e., the localisation surface, finally scaled by the secondary imaging system and received by the detector. A reference wavelength is selected to effectively form measurable low-frequency spatial interference fringes, giving a very high spectral resolution in narrow spectra.
The interferometer essentially follows the principle of two-beam interference. Considering only monochromatic light σ in the dispersion direction, the interference intensity
produced by the wave vectors of two arms can be expressed as:
where,
are the radiation intensity of the two beams;
x denotes the coordinates of the dispersion direction relative to the ZOPD position;
represents the spatial frequency of interference fringe corresponding to wavenumber
;
and
are the reference wavenumber and Littrow angle, respectively, and the interference frequency of the incident light satisfying these two parameters is 0.
When the two arms are equal in length along the optical axis direction, as shown in
Figure 5, the optical axis (i.e., x = 0) is located at the ZOPD position, and the expression of optical path difference (OPD)
U and the coordinate
x of relative ZOPD in the dispersion direction is
The value range of the coordinate
x and OPD
U is shown in Equation (5).
where
W is the grating illumination width. The spectral resolution interval
is determined by the maximum OPD
, as shown in Equation (6). The actual spectral resolution is determined by spectral resolution interval and sampling rate.
The theoretical spectral range
is determined by the pixel number
N of the detector in spectral dimension and the spectral resolution interval, as shown in Equation (7).
However, the effective spectral range of interferometric instruments is affected by two aspects of spectral aliasing: (1) interference aliasing on the other side of the reference wavelength at the low frequency; (2) interference aliasing beyond the detector sampling frequency. The narrowband filter limits these two effects in the spectral range [
38]. The better the rectangularity of the narrowband filter, the wider the effective spectral range of the instrument can achieve. At the current coating levels, a narrowband filter’s full width at half maximum (FWHM) cannot be less than 0.4% of the central wavelength.
Assuming that the narrow band filter’s FWHM is the effective spectral range
of the instrument, the relationship with the theoretical spectral range
is shown in Equation (8), where
k is the percentage of the spectral range occupied by the filter’s FWHM. Therefore, the narrowband filter and plane array detector are the critical devices that restrict the effective spectral bandwidth in hyperspectral interferometry.
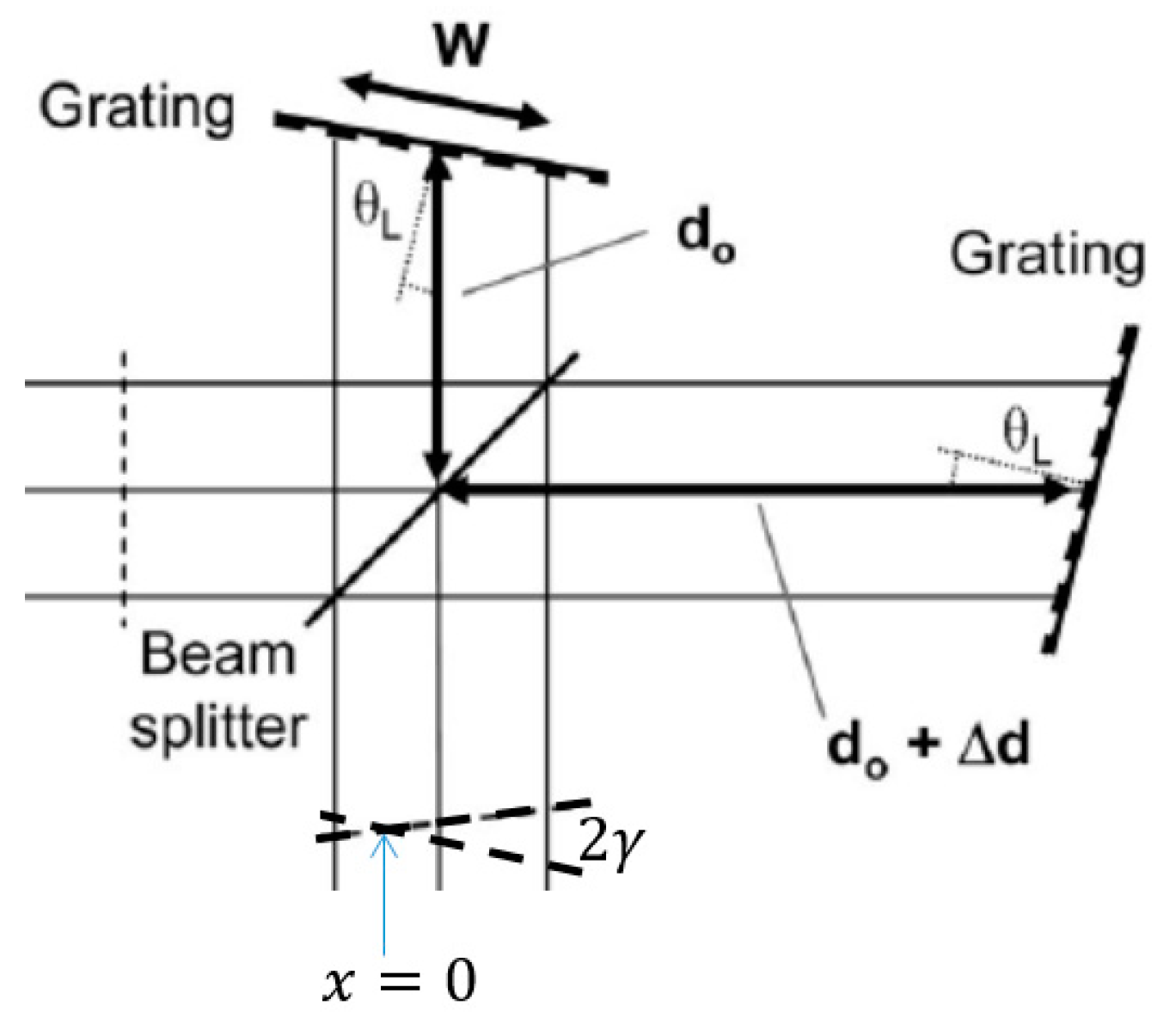
To alleviate the conflict between the effective pixel number
N and spectral range
, the GMI-II introduces an asymmetric interferometric component design into the conventional SHS. As shown in
Figure 6, by adjusting the distance between the grating of one arm and the beamsplitter from the original
to
, the ZOPD position is almost shifted from the optical axis position to the left side of the optical axis.
Compared to the conventional SHS, the range of the coordinates
concerning the ZOPD and OPD
in the dispersion direction is changed from Equation (5) to Equation (9).
The expression for the maximum OPD
and spectral resolution interval
is shown in Equation (10).
The asymmetric SHS effectively increases the spectral resolution interval of the instrument without changing the spectral range, as shown in Equation (11), while keeping the effective pixel number of the detector constant.
We can also expand the exit pupil diameter of the front system, increase the size of the object surface of the secondary imaging mirror group, and obtain the asymmetric interferogram only through the focal plane offset. Nevertheless, there are two problems caused by this: (1) energy loss; (2) the size of the interferometer and secondary imaging mirror group will expand. Based on the above considerations, we choose to change the centre thickness of the two arms’ field-widened prisms to carry out the bias design of ZOPD in the interferometer component of the main observation channel.
Compared to the air spacing thickness deviation
, the thickness deviation of the field-widened optical wedge prisms is
, where
n is the refractive index of the field-widened prisms.
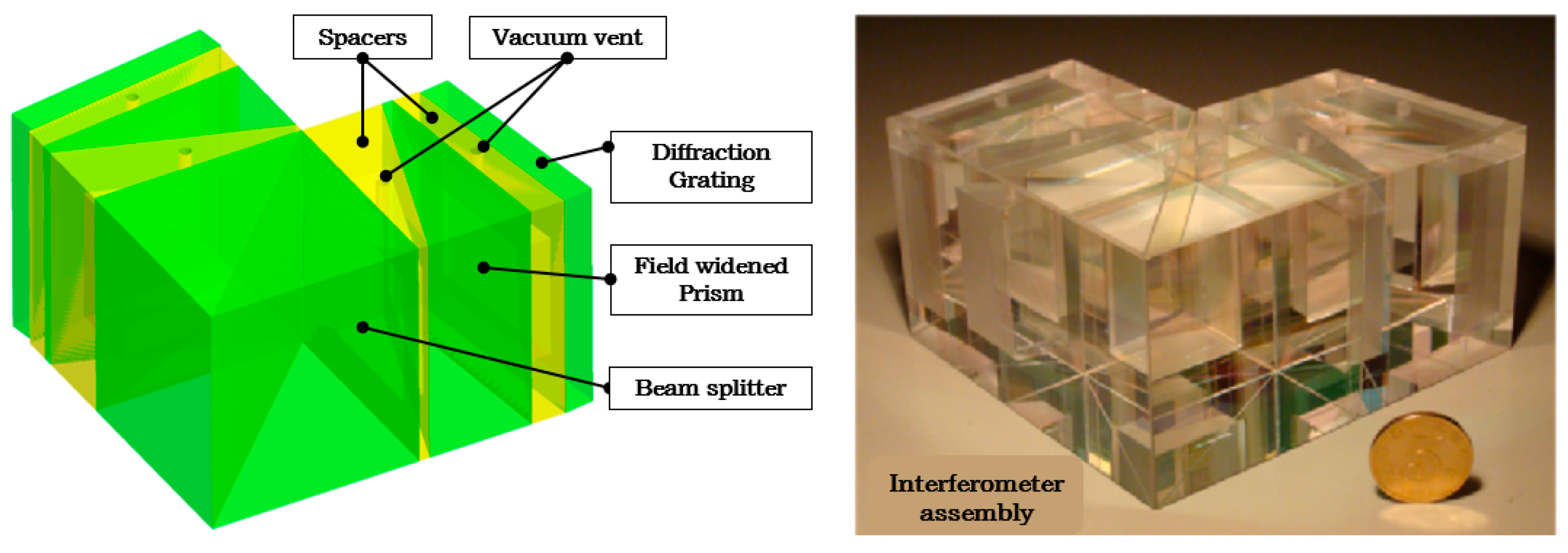
Figure 7 shows the model diagram of the integrated glued interferometer assembly. The optical prisms and spacers with certain angles are glued together by optical glue, which can crack under the influence of external forces. Consequently, in order to enhance the spatial environmental adaptability of the integrated interferometer assembly, we used epoxy structural glue to bond glass cover plates of the same material on both the top and bottom of the interferometer assembly to prevent the loosening of the interferometer component due to stress changes in environmental conditions.
At the same time, the offset design of SHS cannot be carried out without restrictions. In addition to considering the spectral resolution requirements of the instrument, the ZOPD offset design is limited by the minimum sampling points of the short side past the ZOPD position of the interferogram. The instrument’s spectral resolution increases with offset, which is beneficial for fine spectra detection and high-precision concentration inversion for atmospheric GHG molecules. Nonetheless, phase errors, whose form factors are complex, are bound to exist in interferometric spectrometers, and the fewer the number of the short-side sampling points past the ZOPD position, the more difficult it is to correct the phase. Therefore, it is necessary to design the offset value of ZOPD reasonably. The parameters of the three main observation channels’ interferometers are shown in
Table 2.
As can be seen from
Table 2, we have chosen the sampling points of the short side past the ZOPD position of not less than 20% to meet the needs of phase correction on the one hand and to take into account the grating parameters, narrowband filters, primary technical specifications for the main observation channels to match the design as well as. The transmittance of the narrowband filters for the four channels is no more than 5% at the fundamental and spatial frequency cut-off wavelengths, and the transmittance of the effective spectral bandwidth should be as high as possible. It is worth noting that the accuracy requirement of the centre wavelength of the narrowband filter is less significant for the GMI-II than for conventional applications because each spectral absorption peak in this band is equally important for the inversion.
The above design not only meets the main specifications of the GMI-II, such as spectral resolution and effective spectral range, but also meets the constraints and limitations of the processing technology level of core components, such as blazing grating and narrowband filter. The final spectral resolution of the instrument is also related to the scaling ratio of the imaging system in the direction of the grating dispersion, i.e., the spectral dimension, as the scaling ratio is directly related to the size at the localisation plane of the interference fringe conjugate to the detector sensing plane.
2.4. Secondary Imaging System with Non-Isometric Scaling in the Meridian and Sagittal Planes
The role of the secondary imaging system is to scale the interference fringe in the localisation domain plane and to image it on the plane array detector. According to the parameters of the interferometer in
Section 2.3 (the effective width of grating in the dispersion direction, interferometer field of view angle, interferometer optical material and size, etc.) and array detector parameters (spectral response curve, pixel number, pixel size, etc.), the observation channel design parameters of the imaging system is obtained.
The design inputs include the following four requirements: (1) the object plane height, i.e., the exiting pupil position and the size of the collimating unit; (2) the object space NA (Numerical Aperture), which contains the grating dispersion in the effective wavelength range; (3) the object space telecentric system, i.e., the input to the collimating system is a quasi-parallel beam; (4) a fixed scaling ratio in the dispersion direction. At the same time, it is required that the length of the four channels’ imaging system should be the same as possible because, in the thermal design scheme, the cooling and heat dissipation surface of the detector with four channels is transmitted to the whole satellite +Y plane through the same panel.
In the main observation channels, the low spectral response efficiency and the long integration time of the detector lead to excessive dark current. The secondary imaging system of the main observation channels was designed with energy compression along the grating groove direction, i.e., perpendicular to the dispersion direction, which effectively solves the problem that the signal energy is limited by the integration time, or the dark current is too large for the effective signal to be swamped.
The imaging system of the O2 channel has the same scaling in the meridian plane (grating dispersion cross-section) and sagittal plane, both of which are −0.6208. At the same time, the imaging system should be designed to minimise geometric distortion as much as possible, which can generally be ignored at < 0.1%, and geometric distortion correction is not required for the interferometric image pre-processing process.
The imaging systems of the CO
2-2, CH
4 and CO
2-1 channels simultaneously achieve the effective sampling of the maximum OPD in the spectral dimension and energy compression in the spatial dimension.
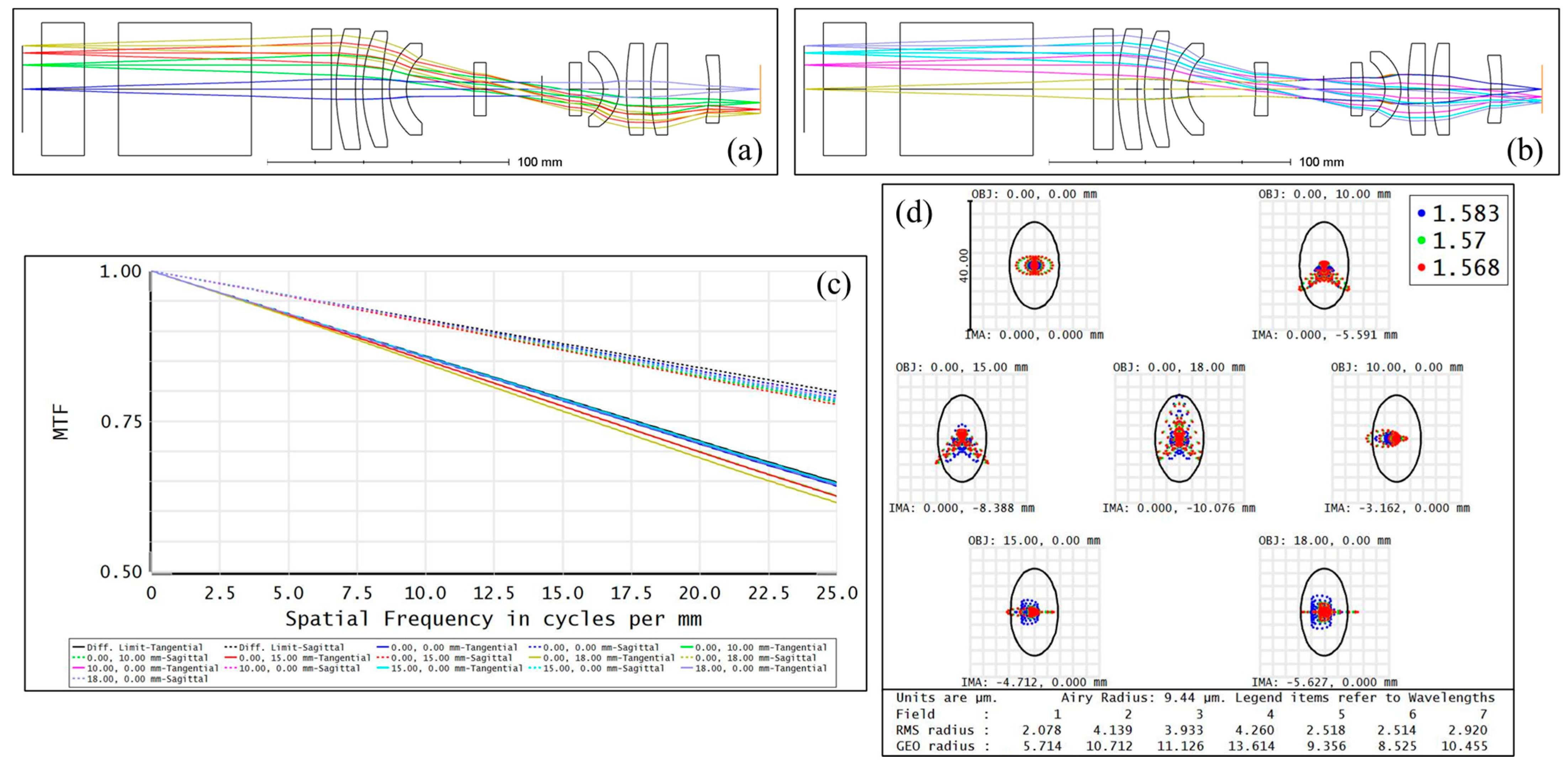
Figure 8a,b shows the CO
2-2 channel’s optical path diagrams of the grating and vertical dispersion direction, respectively. By using the curvature difference between the two mirrors of the middle image plane in the meridian plane and the sagittal plane, namely, the concave cylindrical mirror and convex cylindrical mirror, the different imaging ratios of spatial and spectral dimensions are realized, which are −0.5594 and −0.3108 respectively.
Correspondingly, the diffraction limits of the meridian and sagittal planes are different, as shown in
Figure 8c at the detector Nyquist sampling frequency of 25.0 lp/mm, where the corresponding MTF in the meridian and sagittal planes reaches 0.65 and 0.80, respectively. The Airy spot also exhibits an elliptical shape, as shown in
Figure 8d. It should be noted that the relative distortion of the spectral dimension is better than 0.1%, and that of the spatial dimension is about 2% as far as possible. Therefore, the relative distortion of spatial dimension needs to be corrected in the subsequent data processing. The design results of imaging systems are shown in
Table 3.


 ,
, 


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}