




Estimating Black Oat Biomass Using Digital Surface Models and a Vegetation Index Derived from RGB-Based Aerial Images


Abstract
:1. Introduction

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Name | Abbreviation | Equation | Application | Reference |
|---|---|---|---|---|
| Visible Atmospherically Resistant Index | VARI | VARI = (G − R)/(G + R + B) | Corn biomass | [30] |
| Normalized Green Red Difference Index | NGRDI | NGRDO = (G − R)/(G + R) | Grass biomass | [9] |
| Normalized Excess Green Index | NExG | NExG = (2G − R − B)/(R + G) | Rice nitrogen | [31] |
| Green–Red Ratio Index | GRRI | GRRI = G/R | Corn nitrogen | [32] |
| True Color Vegetation Index | TCVI | TCVI = (2R − 2B)/(2R − G − 2B + 255 × 0.4) | Wheat nitrogen | [33] |
2. Materials and Methods
2.1. Experimental Site
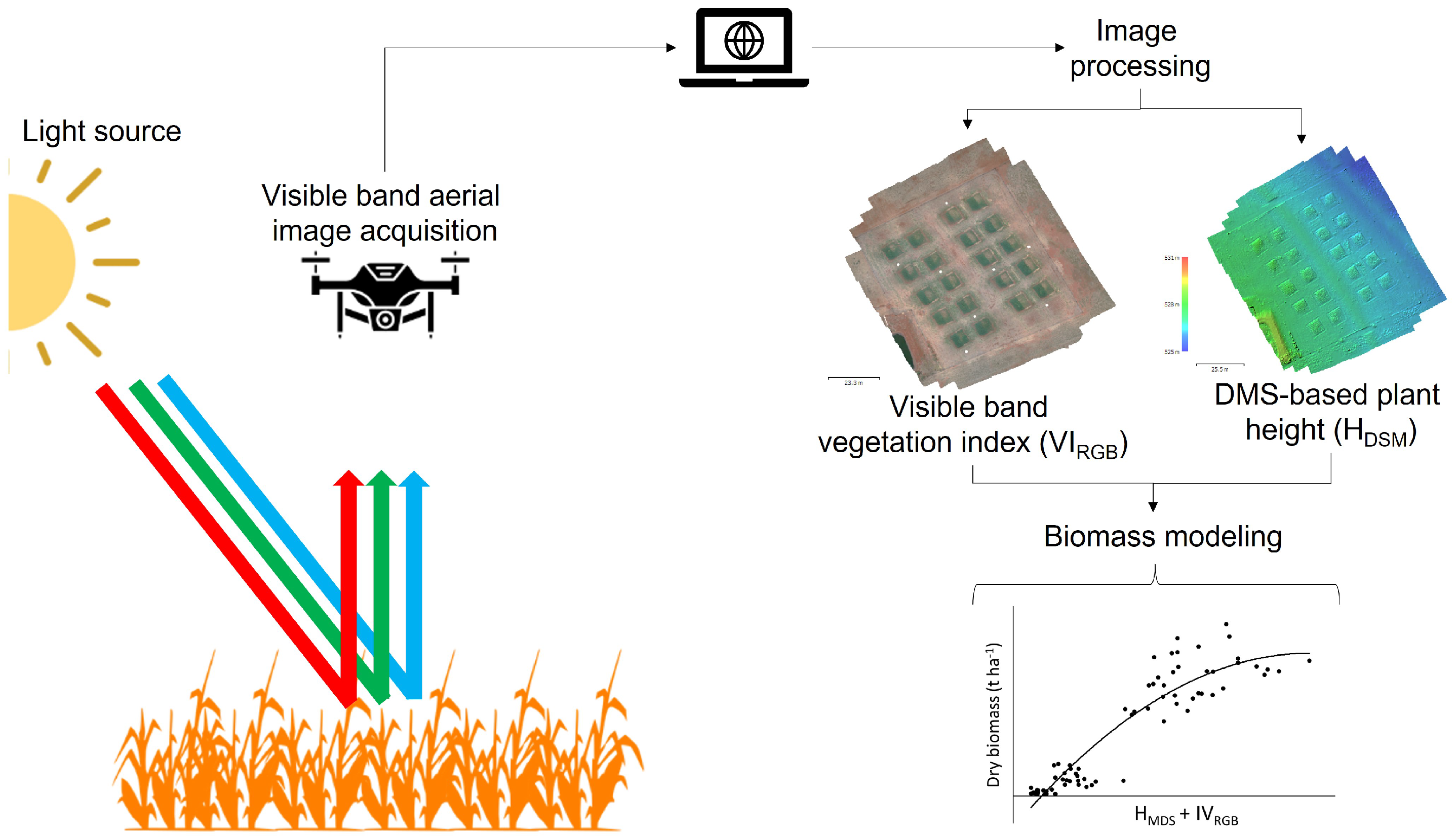
2.2. Image Acquisition and Processing
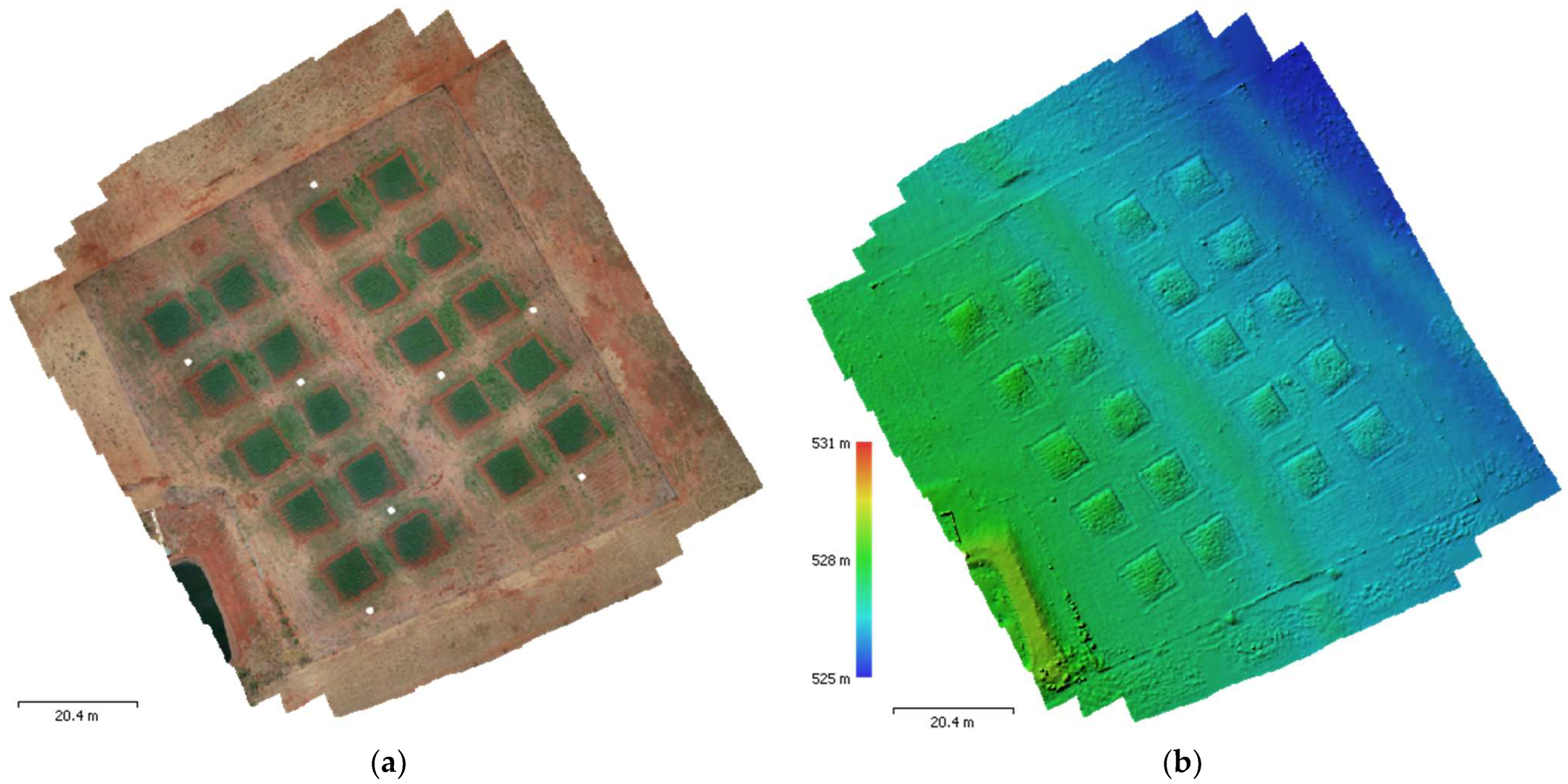
2.3. Processing the Orthoimages and Digital Surface Models
2.4. Statistical Analysis
3. Results
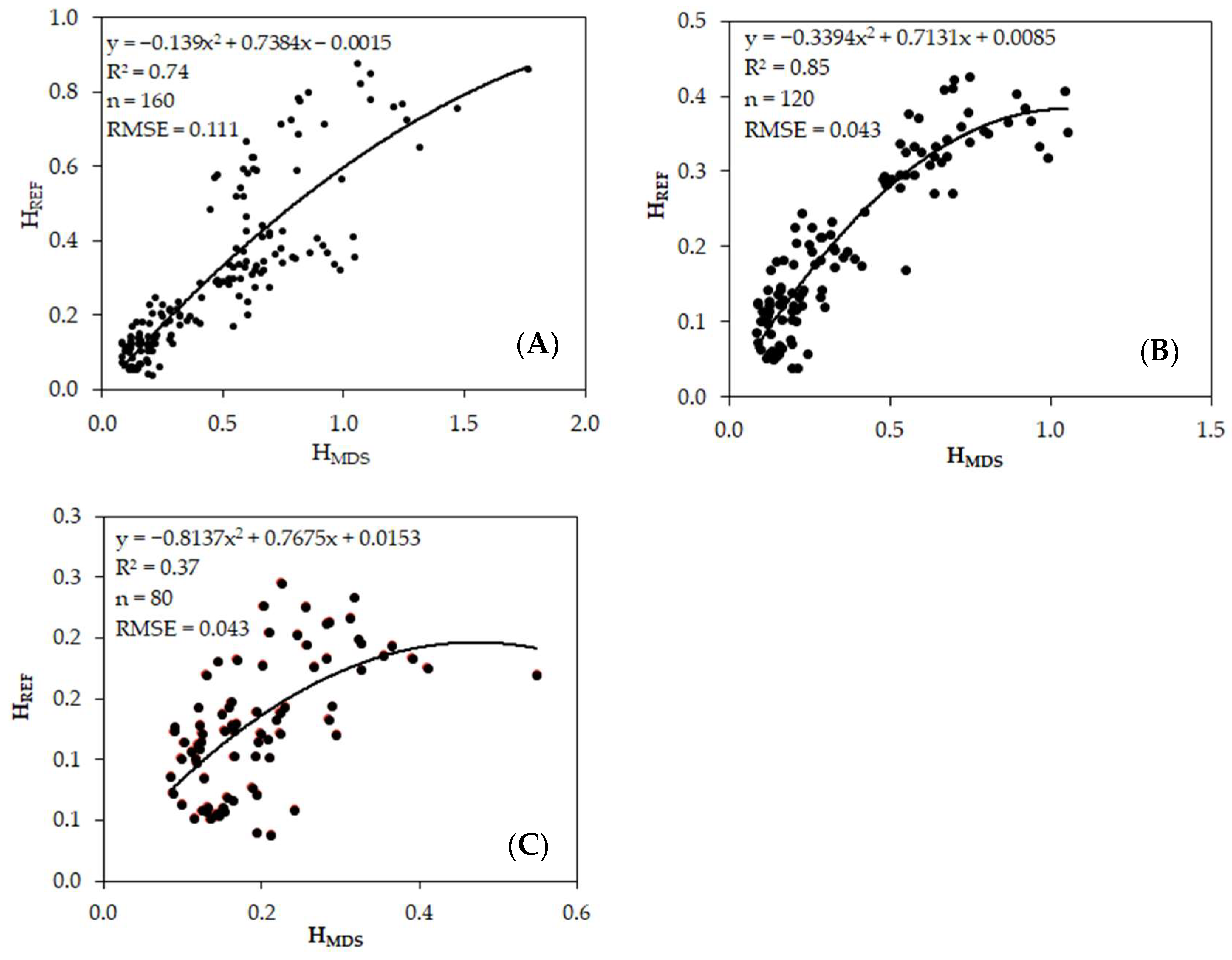
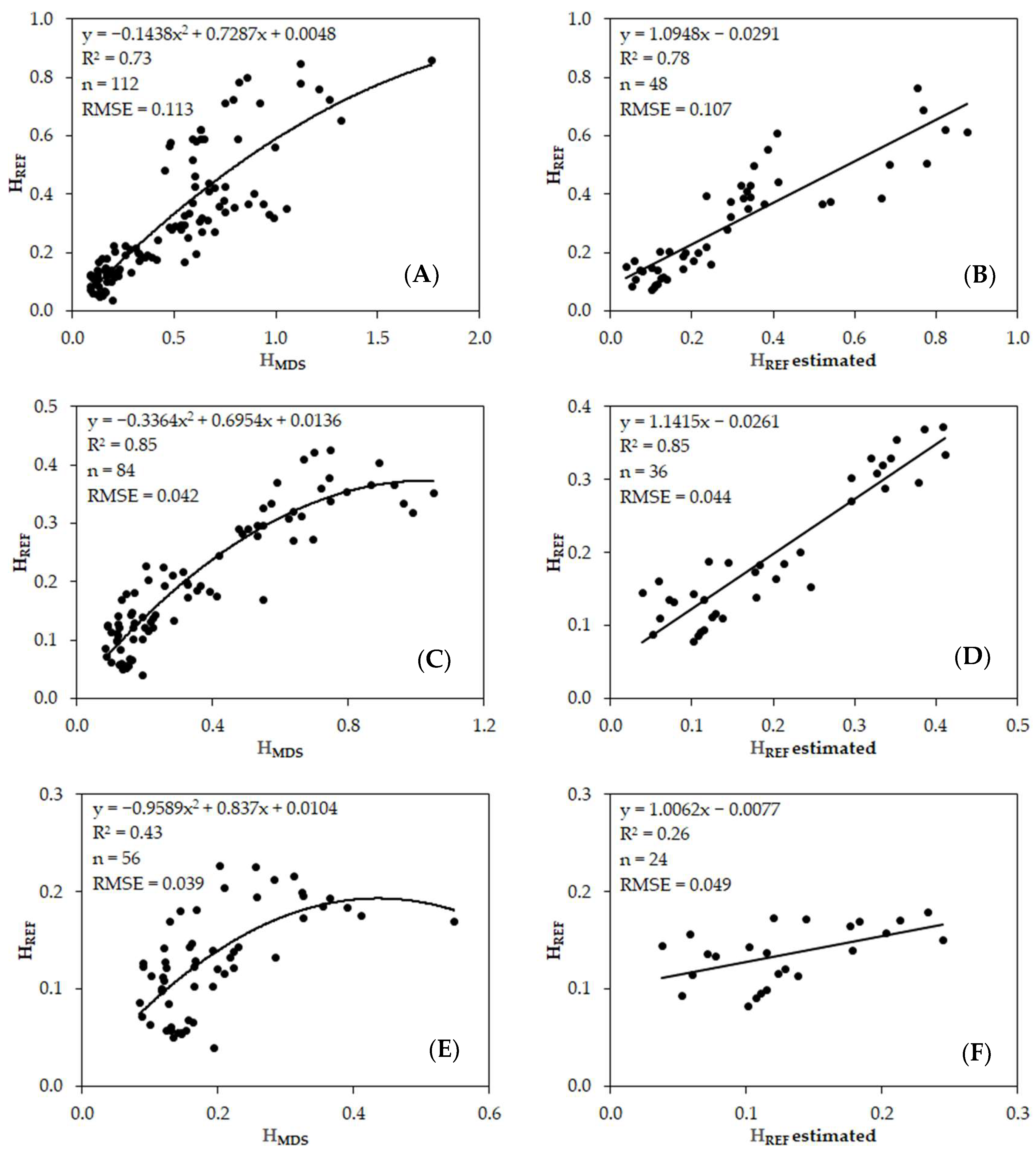
3.1. Plant Height Assessment
3.2. Biomass Assessment
4. Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Ceretta, C.A.; Basso, C.J.; Herbes, M.G.; Poletto, N.; Da Silveira, M.J. Produção E Decomposição De Fitomassa De Plantas Invernais De Cobertura De Solo E Milho, Sob Diferentes Manejos Da Adubação Nitrogenada. Ciência Rural 2002, 32, 49–54. [Google Scholar] [CrossRef]
- Gabriel, A.; Antonio, F.; Pessoa, S.; Strohhaecker, L.; Helmich, J.J. Preparo Convencional E Cultivo Mínimo Do Solo Na Cultura De Mandioca Em Condições De Adubação Verde Com Ervilhaca E Differences Between Convencional and Minimum Tillage Soil Preparation. Ciência Rural 2000, 30, 953–957. [Google Scholar] [CrossRef]
- Cassol, L.C.; Piva, J.T.; Soares, A.B.; Assmann, A.L. Produtividade e composição estrutural de aveia e azevém submetidos a épocas de corte e adubação nitrogenada. Rev. Ceres 2011, 58, 438–443. [Google Scholar] [CrossRef] [Green Version]
- Ferolla, F.S.; Vásquez, H.M.; Da Silva, J.F.C.; Viana, A.P.; Domingues, F.N.; Lista, F.N. Composição bromatológica e fracionamento de carboidratos e proteínas de aveia-preta e triticale sob corte e pastejo. Rev. Bras. Zootec. 2008, 37, 197–204. [Google Scholar] [CrossRef] [Green Version]
- Machado, L.A.Z. “Aveia: Forragem E Cobertura Do Solo,” Embrapa Agropecuária Oeste-Coleção Sistema Plantio Direto, p. 16, 2000. Available online: https://www.infoteca.cnptia.embrapa.br/bitstream/doc/243576/1/COL20003.pdf (accessed on 20 December 2022).
- Fernando Sousa de Almeida and Benedito Noedi Rodrigues, Guia de herbicidas: Contribuição para o uso adequado em plantio direto e convencional, 1st ed. Londrina-PR. 1985. Available online: https://biblioteca.ibge.gov.br/index.php/biblioteca-catalogo?id=216401&view=detalhes (accessed on 17 December 2022).
- Acorsi, M.G.; das Dores Abati Miranda, F.; Martello, M.; Smaniotto, D.A.; Sartor, L.R. Estimating Biomass of Black Oat Using UAV-Based RGB Imaging. Agronomy 2019, 9, 344. [Google Scholar] [CrossRef] [Green Version]
- Hakl, J.; Hrevušová, Z.; Hejcman, M.; Fuksa, P. The use of a rising plate meter to evaluate lucerne (Medicago sativa L.) height as an important agronomic trait enabling yield estimation. Grass Forage Sci. 2012, 67, 589–596. [Google Scholar] [CrossRef]
- Lussem, U.; Bolten, A.; Gnyp, M.L.; Jasper, J.; Bareth, G. Evaluation of Rgb-Based Vegetation Indices from Uav Imagery to Estimate Forage Yield in Grassland. The International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences-ISPRS, Beijing, China, 7 May 2018, 42, 1215–1219. [Google Scholar] [CrossRef] [Green Version]
- McKevith, B. Nutritional aspects of cereals. Nutr. Bull. 2004, 29, 111–142. [Google Scholar] [CrossRef]
- Filho, A.C.; Toebe, M.; Alves, B.M.; Burin, C.; Dos Santos, G.O.; Facco, G.; Neu, I.M.M. Relações lineares entre caracteres de aveia preta. Ciencia Rural 2015, 45, 985–992. [Google Scholar] [CrossRef] [Green Version]
- Bendig, J.; Yu, K.; Aasen, H.; Bolten, A.; Bennertz, S.; Broscheit, J.; Gnyp, M.L.; Bareth, G. Combining UAV-based plant height from crop surface models, visible, and near infrared vegetation indices for biomass monitoring in barley. Int. J. Appl. Earth Obs. Geoinf. 2015, 39, 79–87. [Google Scholar] [CrossRef]
- Bendig, J.; Bolten, A.; Bareth, G. UAV-based Imaging for Multi-Temporal, very high Resolution Crop Surface Models to monitor Crop Growth Variability. Photogramm Fernerkun 2013, 6, 551–562. [Google Scholar] [CrossRef]
- Rango, A.; Laliberte, A.; Winters, C.; Kris, H. Devolopment of and operational UAV/remote sensing capability for rangeland management. In Proceedings of the 23nd Bristol International Unmanned Air Vehicle Systems (UAVS) Conference, Bristol, UK, 7 April 2008; p. 9. [Google Scholar]
- Getzin, S.; Nuske, R.S.; Wiegand, K. Using Unmanned Aerial Vehicles (UAV) to Quantify Spatial Gap Patterns in Forests. Remote Sens. 2014, 6, 6988–7004. [Google Scholar] [CrossRef] [Green Version]
- Zhang, H.; Wang, L.; Tian, T.; Yin, J. A Review of Unmanned Aerial Vehicle Low-Altitude Remote Sensing (UAV-LARS) Use in Agricultural Monitoring in China. Remote Sens. 2021, 13, 1221. [Google Scholar] [CrossRef]
- Bagaram, M.B.; Giuliarelli, D.; Chirici, G.; Giannetti, F.; Barbati, A. UAV Remote Sensing for Biodiversity Monitoring: Are Forest Canopy Gaps Good Covariates? Remote Sens. 2018, 10, 1397. [Google Scholar] [CrossRef]
- Tsouros, D.C.; Bibi, S.; Sarigiannidis, P.G. A review on UAV-based applications for precision agriculture. Information 2019, 10, 349. [Google Scholar] [CrossRef] [Green Version]
- Gonzales, R.C.; Woods, R.E. Digital Image Processing; Prentice Hall: Upper Saddle River, NJ, USA, 1996; ISBN 9780131687288. [Google Scholar]
- Peñuelas, J.; Filella, I. Technical focus: Visible and near-infrared reflectance techniques for diagnosing plant physiological status. Trends Plant Sci. 1998, 3, 151–156. [Google Scholar] [CrossRef]
- Su, B.; Xue, J.R.; Xie, C.Y.; Fang, Y.L.; Song, Y.Y.; Fuentes, S. Digital surface model applied to unmanned aerial vehicle based photogrammetry to assess potential biotic or abiotic effects on grapevine canopies. Int. J. Agric. Biol. Eng. 2016, 9, 119–130. [Google Scholar] [CrossRef]
- Sanches, G.M.; Duft, D.G.; Kölln, O.T.; Luciano, A.C.D.S.; De Castro, S.G.Q.; Okuno, F.M.; Franco, H.C.J. The potential for RGB images obtained using unmanned aerial vehicle to assess and predict yield in sugarcane fields. Int. J. Remote Sens. 2018, 39, 5402–5414. [Google Scholar] [CrossRef]
- Ballesteros, R.; Ortega, J.F.; Hernandez, D.; Moreno, M.A. Onion biomass monitoring using UAV-based RGB imaging. Precis. Agric. 2018, 19, 840–857. [Google Scholar] [CrossRef]
- Huang, Y.; Brand, H.J.; Sui, R.; Thomson, S.J.; Furukawa, T.; Ebelhar, M.W. Cotton Yield Estimation Using Very High-Resolution Digital Images Acquired with a Low-Cost Small Unmanned Aerial Vehicle. Trans. ASABE 2016, 59, 1563–1574. [Google Scholar] [CrossRef] [Green Version]
- Yue, J.; Feng, H.; Li, Z.; Zhou, C.; Xu, K. Mapping winter-wheat biomass and grain yield based on a crop model and UAV remote sensing. Int. J. Remote Sens. 2021, 42, 1577–1601. [Google Scholar] [CrossRef]
- García-Martínez, H.; Flores-Magdaleno, H.; Ascencio-Hernández, R.; Khalil-Gardezi, A.; Tijerina-Chávez, L.; Mancilla-Villa, O.; Vázquez-Peña, M. Corn Grain Yield Estimation from Vegetation Indices, Canopy Cover, Plant Density, and a Neural Network Using Multispectral and RGB Images Acquired with Unmanned Aerial Vehicles. Agriculture 2020, 10, 277. [Google Scholar] [CrossRef]
- Maimaitijiang, M.; Sagan, V.; Sidike, P.; Hartling, S.; Esposito, F.; Fritschi, F.B. Soybean yield prediction from UAV using multimodal data fusion and deep learning. Remote Sens. Environ. 2019, 237, 111599. [Google Scholar] [CrossRef]
- Li, B.; Xu, X.; Zhang, L.; Han, J.; Bian, C.; Li, G.; Liu, J.; Jin, L. Above-ground biomass estimation and yield prediction in potato by using UAV-based RGB and hyperspectral imaging. ISPRS J. Photogramm. Remote Sens. 2020, 162, 161–172. [Google Scholar] [CrossRef]
- Zheng, Y.; Zhu, Q.; Huang, M.; Guo, Y.; Qin, J. Maize and weed classification using color indices with support vector data description in outdoor fields. Comput. Electron. Agric. 2017, 141, 215–222. [Google Scholar] [CrossRef]
- Gitelson, A.A.; Viña, A.; Arkebauer, T.J.; Rundquist, D.C.; Keydan, G.; Leavitt, B. Remote estimation of leaf area index and green leaf biomass in maize canopies. Geophys. Res. Lett. 2003, 30, 1248. [Google Scholar] [CrossRef] [Green Version]
- Zheng, H.; Cheng, T.; Li, D.; Zhou, X.; Yao, X.; Tian, Y.; Cao, W.; Zhu, Y. Evaluation of RGB, Color-Infrared and Multispectral Images Acquired from Unmanned Aerial Systems for the Estimation of Nitrogen Accumulation in Rice. Remote Sens. 2018, 10, 824. [Google Scholar] [CrossRef] [Green Version]
- Lu, J.; Cheng, D.; Geng, C.; Zhang, Z.; Xiang, Y.; Hu, T. Combining plant height, canopy coverage and vegetation index from UAV-based RGB images to estimate leaf nitrogen concentration of summer maize. Biosyst. Eng. 2021, 202, 42–54. [Google Scholar] [CrossRef]
- Ge, H.; Xiang, H.; Ma, F.; Li, Z.; Qiu, Z.; Tan, Z.; Du, C. Estimating Plant Nitrogen Concentration of Rice through Fusing Vegetation Indices and Color Moments Derived from UAV-RGB Images. Remote Sens. 2021, 13, 1620. [Google Scholar] [CrossRef]
- Patrício, D.I.; Rieder, R. Computer vision and artificial intelligence in precision agriculture for grain crops: A systematic review. Comput. Electron. Agric. 2018, 153, 69–81. [Google Scholar] [CrossRef] [Green Version]
- Bendig, J.; Bolten, A.; Bennertz, S.; Broscheit, J.; Eichfuss, S.; Bareth, G. Estimating Biomass of Barley Using Crop Surface Models (CSMs) Derived from UAV-Based RGB Imaging. Remote Sens. 2014, 6, 10395–10412. [Google Scholar] [CrossRef] [Green Version]
- Tilly, N.; Hoffmeister, D.; Cao, Q.; Lenz-Wiedemann, V.; Miao, Y.; Bareth, G. Transferability of Models for Estimating Paddy Rice Biomass from Spatial Plant Height Data. Agriculture 2015, 5, 538–560. [Google Scholar] [CrossRef] [Green Version]
- Yue, J.; Yang, G.; Li, C.; Li, Z.; Wang, Y.; Feng, H.; Xu, B. Estimation of Winter Wheat Above-Ground Biomass Using Unmanned Aerial Vehicle-Based Snapshot Hyperspectral Sensor and Crop Height Improved Models. Remote Sens. 2017, 9, 708. [Google Scholar] [CrossRef] [Green Version]
- Watanabe, K.; Guo, W.; Arai, K.; Takanashi, H.; Kajiya-Kanegae, H.; Kobayashi, M.; Yano, K.; Tokunaga, T.; Fujiwara, T.; Tsutsumi, N.; et al. High-Throughput Phenotyping of Sorghum Plant Height Using an Unmanned Aerial Vehicle and Its Application to Genomic Prediction Modeling. Front. Plant Sci. 2017, 8, 421. [Google Scholar] [CrossRef] [Green Version]
- Han, X.; Thomasson, J.A.; Bagnall, G.C.; Pugh, N.A.; Horne, D.W.; Rooney, W.L.; Jung, J.; Chang, A.; Malambo, L.; Popescu, S.C.; et al. Measurement and Calibration of Plant-Height from Fixed-Wing UAV Images. Sensors 2018, 18, 4092. [Google Scholar] [CrossRef] [Green Version]
- Luz, P.H.D.C.; Herling, V.R.; Braga, G.; Filho, J.C.M.N.; de Lima, C.G. RESPOSTA DA AVEIA PRETA (Avena strigosa SCHREB) À IRRIGAÇÃO POR ASPERSÃO E ADUBAÇÃO NITROGENADA. Braz. J. Agric.-Rev. Agric. 2015, 79, 353–362. [Google Scholar] [CrossRef] [Green Version]
- Jannoura, R.; Brinkmann, K.; Uteau, D.; Bruns, C.; Joergensen, R.G. Monitoring of crop biomass using true colour aerial photographs taken from a remote controlled hexacopter. Biosyst. Eng. 2015, 129, 341–351. [Google Scholar] [CrossRef]
- Yu, D.; Zha, Y.; Shi, L.; Jin, X.; Hu, S.; Yang, Q.; Huang, K.; Zeng, W. Improvement of sugarcane yield estimation by assimilating UAV-derived plant height observations. Eur. J. Agron. 2020, 121, 126159. [Google Scholar] [CrossRef]
- Sumesh, K.S.; Ninsawat, S.; Som-Ard, J. Integration of RGB-based vegetation index, crop surface model and object-based image analysis approach for sugarcane yield estimation using unmanned aerial vehicle. Comput. Electron. Agric. 2021, 180, 105903. [Google Scholar] [CrossRef]
- Possoch, M.; Bieker, S.; Hoffmeister, D.; Bolten, A.; Schellberg, J.; Bareth, G. Multi-Temporal crop surface models combined with the rgb vegetation index from UAV-based images for forage monitoring in grassland. ISPRS-Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2016, XLI-B1, 991–998. [Google Scholar] [CrossRef] [Green Version]
- Corti, M.; Cavalli, D.; Cabassi, G.; Bechini, L.; Pricca, N.; Paolo, D.; Marinoni, L.; Vigoni, A.; Degano, L.; Gallina, P.M. Improved estimation of herbaceous crop aboveground biomass using UAV-derived crop height combined with vegetation indices. Precis. Agric. 2022, 1–20. [Google Scholar] [CrossRef]





| Flight | Date 1 | DAS 2 | Growth Stage | Density (pt. m−2) 3 | Image Overlap 4 | DSM Resolution (mm pix−1) | Orthoimage Resolution (cm pix−1) |
|---|---|---|---|---|---|---|---|
| 1 | 10 August 2020 | 11 | Tillering | 6941.72 | >8 | 6.29 | 1.26 |
| 2 | 18 August 2020 | 19 | Tillering | 7139.54 | >8 | 6.22 | 1.24 |
| 3 | 25 August 2020 | 26 | Booting | 6977.67 | >8 | 6.25 | 1.25 |
| 4 | 1 September 2020 | 33 | Booting | 7191.29 | >8 | 6.06 | 1.21 |
| 5 | 8 September 2020 | 40 | Flowering | 7234.58 | >8 | 6.21 | 1.24 |
| 6 | 15 September 2020 | 47 | Flowering | 7107.64 | >8 | 6.20 | 1.24 |
| 7 | 23 September 2020 | 55 | Grain filling | 7549.89 | >8 | 6.13 | 1.23 |
| 8 | 30 September 2020 | 62 | Grain filling | 7277.06 | >8 | 6.28 | 1.26 |
| Flight | HREF (m) | HDSM (m) | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| µ | σ | Min | Max | Range | µ | σ | Min | Max | Range | |
| 1 | 0.061 | 0.013 | 0.038 | 0.087 | 0.048 | 0.148 | 0.041 | 0.085 | 0.241 | 0.157 |
| 2 | 0.111 | 0.015 | 0.069 | 0.138 | 0.069 | 0.135 | 0.037 | 0.089 | 0.210 | 0.121 |
| 3 | 0.142 | 0.021 | 0.115 | 0.182 | 0.067 | 0.196 | 0.051 | 0.120 | 0.294 | 0.174 |
| 4 | 0.201 | 0.021 | 0.170 | 0.245 | 0.075 | 0.309 | 0.080 | 0.202 | 0.548 | 0.346 |
| 5 | 0.302 | 0.025 | 0.246 | 0.337 | 0.091 | 0.568 | 0.076 | 0.418 | 0.694 | 0.277 |
| 6 | 0.374 | 0.031 | 0.318 | 0.426 | 0.107 | 0.805 | 0.146 | 0.557 | 1.052 | 0.495 |
| 7 | 0.484 | 0.144 | 0.198 | 0.665 | 0.467 | 0.576 | 0.069 | 0.409 | 0.666 | 0.257 |
| 8 | 0.730 | 0.108 | 0.426 | 0.876 | 0.450 | 1.041 | 0.283 | 0.602 | 1.765 | 1.163 |
| Flight | HREF (m) | HDSM (m) ns | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| T1 | T2 | T3 | T4 | T5 | µF | T1 | T2 | T3 | T4 | T5 | µF | |
| 1 | 0.059 | 0.066 | 0.062 | 0.062 | 0.057 | 0.061 | 0.135 | 0.126 | 0.161 | 0.175 | 0.144 | 0.148 |
| 2 | 0.103 | 0.099 | 0.122 | 0.113 | 0.117 | 0.111 | 0.130 | 0.120 | 0.137 | 0.152 | 0.135 | 0.135 |
| 3 | 0.133 | 0.150 | 0.142 | 0.144 | 0.139 | 0.142 | 0.182 | 0.184 | 0.197 | 0.216 | 0.198 | 0.195 |
| 4 | 0.196 | 0.204 | 0.204 | 0.198 | 0.200 | 0.201 | 0.296 | 0.314 | 0.293 | 0.357 | 0.286 | 0.309 |
| 5 | 0.298 | 0.317 | 0.298 | 0.287 | 0.309 | 0.302 | 0.569 | 0.576 | 0.546 | 0.541 | 0.610 | 0.568 |
| 6 | 0.363 | 0.377 | 0.383 | 0.364 | 0.382 | 0.374 | 0.742 | 0.776 | 0.794 | 0.845 | 0.867 | 0.805 |
| 7 | 0.450 bc | 0.624 a | 0.340 c | 0.456 bc | 0.548 ab | 0.484 | 0.557 | 0.625 | 0.553 | 0.586 | 0.556 | 0.576 |
| 8 | 0.762 ab | 0.819 a | 0.668 b | 0.685 b | 0.719 ab | 0.730 | 0.982 | 1.223 | 0.863 | 1.109 | 1.025 | 1.044 |
| µT | 0.295 | 0.332 | 0.277 | 0.289 | 0.309 | 0.449 | 0.493 | 0.443 | 0.497 | 0.477 | ||
| Growth Stage | DAS | T1 | T2 | T3 | T4 | T5 |
|---|---|---|---|---|---|---|
| Tillering | 19 | 0.111 | 0.112 | 0.175 | 0.123 | 0.179 |
| Booting | 33 | 0.680 | 0.589 | 0.773 | 0.729 | 0.782 |
| Flowering | 47 | 3.400 | 3.739 | 3.902 | 3.809 | 3.970 |
| Grain filling | 62 | 5.238 | 4.715 | 4.715 | 5.066 | 5.213 |
| Flight | DAS | Growth Stage | Parameters | µ | σ | Median | Range |
|---|---|---|---|---|---|---|---|
| 1 and 2 | 19 | Tillering | HREF | 0.111 | 0.015 | 0.069 | 0.068 |
| HDSM | 0.135 | 0.037 | 0.120 | 0.121 | |||
| DB | 0.140 | 0.066 | 0.114 | 0.235 | |||
| 3 and 4 | 33 | Booting | HREF | 0.201 | 0.021 | 0.197 | 0.075 |
| HDSM | 0.309 | 0.080 | 0.299 | 0.346 | |||
| DB | 0.711 | 0.264 | 0.620 | 0.856 | |||
| 5 and 6 | 47 | Flowering | HREF | 0.374 | 0.031 | 0.369 | 0.107 |
| HDSM | 0.805 | 0.146 | 0.770 | 0.495 | |||
| DB | 3.764 | 0.638 | 3.755 | 2.442 | |||
| 7 and 8 | 62 | Grain filling | HREF | 0.730 | 0.108 | 0.756 | 0.450 |
| HDSM | 1.041 | 0.283 | 1.026 | 1.163 | |||
| DB | 5.136 | 0.918 | 5.031 | 3.434 |
| DB | HDSM | HREF | MPRI | NExG | VARI | GRRI | TCVI | |
|---|---|---|---|---|---|---|---|---|
| DB | 1 | |||||||
| HDSM | 0.8898 | 1 | ||||||
| HREF | 0.9249 | 0.8711 | 1 | |||||
| MPRI | 0.7797 | 0.7244 | 0.7059 | 1 | ||||
| NExG | 0.7655 | 0.7151 | 0.6834 | 0.9935 | 1 | |||
| VARI | 0.7880 | 0.7258 | 0.7141 | 0.9986 | 0.9891 | 1 | ||
| GRRI | 0.7912 | 0.7206 | 0.7109 | 0.9953 | 0.9880 | 0.9982 | 1 | |
| TCVI | −0.7987 | −0.7238 | −0.7371 | −0.9662 | −0.9378 | −0.9764 | −0.9761 | 1 |
| Growth Stage | Regression | Equation | n | R2 | RMSE |
|---|---|---|---|---|---|
| Booting | DB vs. HDSM | 40 | 0.46 | 0.251 | |
| DB vs. TCVI | 40 | 0.80 | 0.153 | ||
| DB vs. HDSM + TCVI | 40 | 0.84 | 0.137 | ||
| Flowering | DB vs. HDSM | 60 | 0.82 | 0.685 | |
| DB vs. TCVI | 60 | 0.60 | 1.031 | ||
| DB vs. HDSM + TCVI | 60 | 0.85 | 0.629 | ||
| Grain Filling | DB vs. HDSM | 80 | 0.84 | 0.859 | |
| DB vs. TCVI | 80 | 0.64 | 1.296 | ||
| DB vs. HDSM + TCVI | 80 | 0.86 | 0.816 | ||
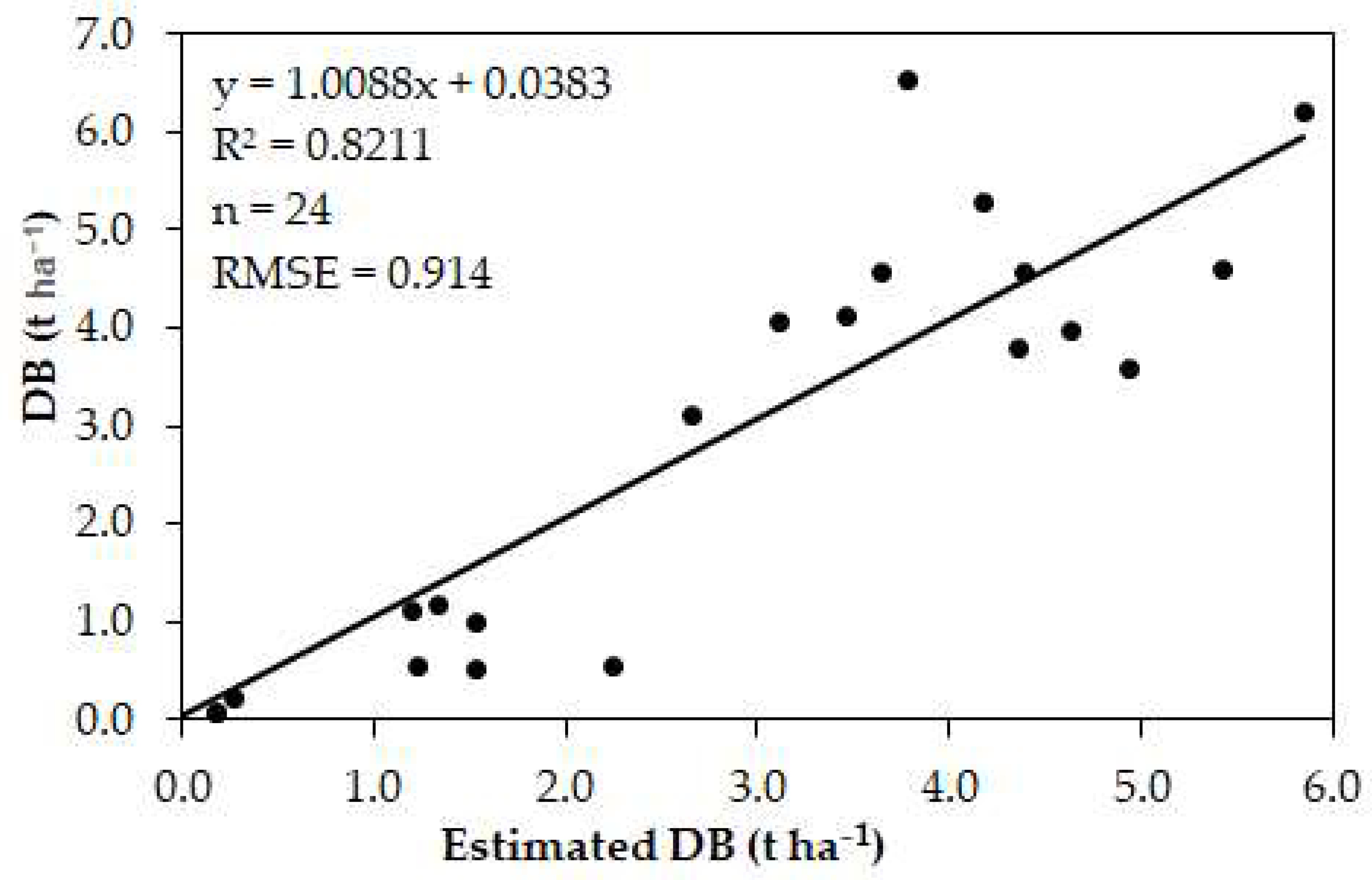
| Validation model | DB vs. HDSM + TCVI | 56 | 0.87 | 0.769 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Trevisan, L.R.; Brichi, L.; Gomes, T.M.; Rossi, F. Estimating Black Oat Biomass Using Digital Surface Models and a Vegetation Index Derived from RGB-Based Aerial Images. Remote Sens. 2023, 15, 1363. https://doi.org/10.3390/rs15051363
Trevisan LR, Brichi L, Gomes TM, Rossi F. Estimating Black Oat Biomass Using Digital Surface Models and a Vegetation Index Derived from RGB-Based Aerial Images. Remote Sensing. 2023; 15(5):1363. https://doi.org/10.3390/rs15051363
Chicago/Turabian StyleTrevisan, Lucas Renato, Lisiane Brichi, Tamara Maria Gomes, and Fabrício Rossi. 2023. "Estimating Black Oat Biomass Using Digital Surface Models and a Vegetation Index Derived from RGB-Based Aerial Images" Remote Sensing 15, no. 5: 1363. https://doi.org/10.3390/rs15051363
APA StyleTrevisan, L. R., Brichi, L., Gomes, T. M., & Rossi, F. (2023). Estimating Black Oat Biomass Using Digital Surface Models and a Vegetation Index Derived from RGB-Based Aerial Images. Remote Sensing, 15(5), 1363. https://doi.org/10.3390/rs15051363