


Unified Framework for Ship Detection in Multi-Frequency SAR Images: A Demonstration with COSMO-SkyMed, Sentinel-1, and SAOCOM Data


Abstract
:1. Introduction
2. Multi-Mission/Multi-Frequency SAR Dataset
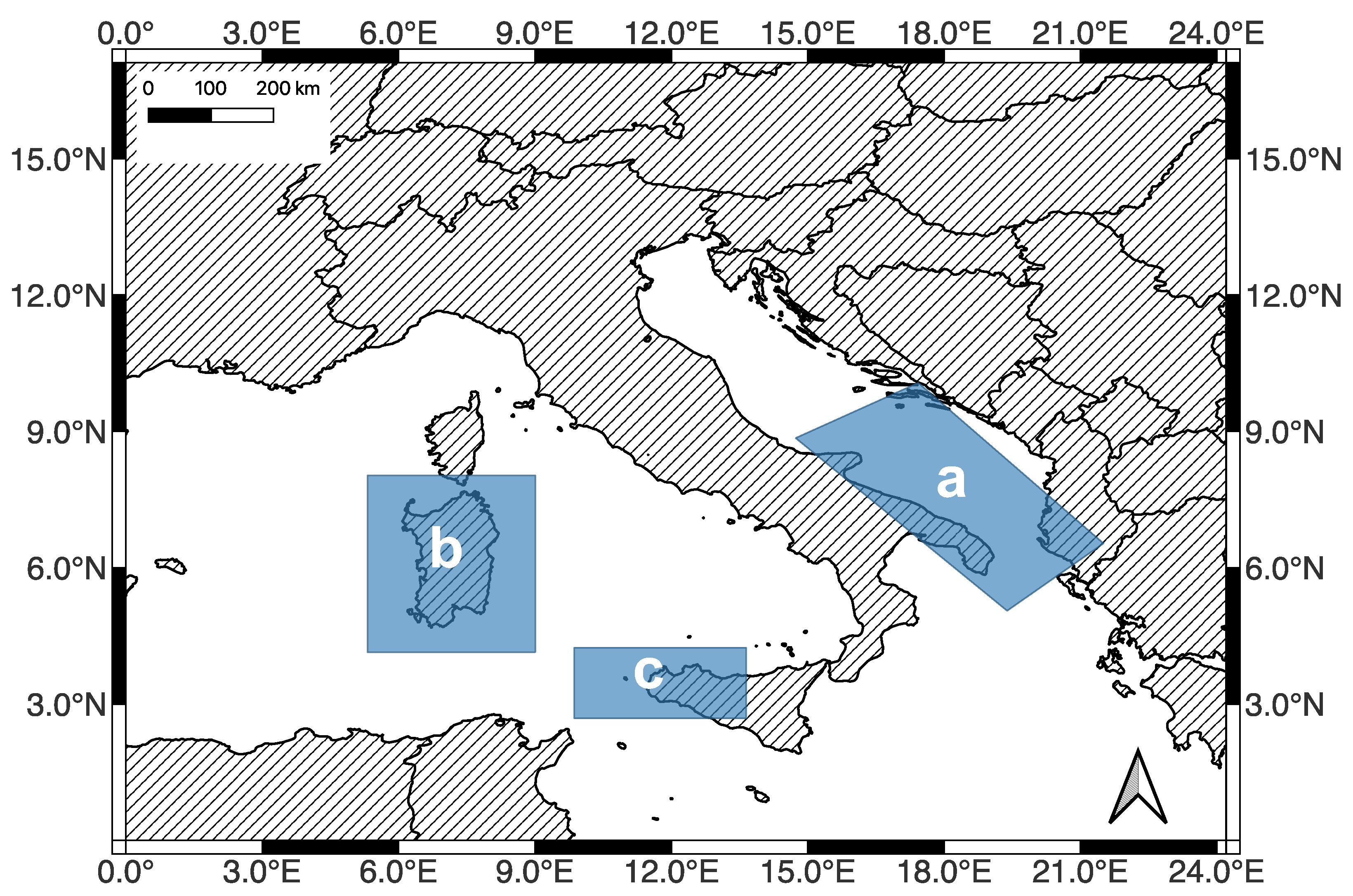
2.1. Selected Scenarios
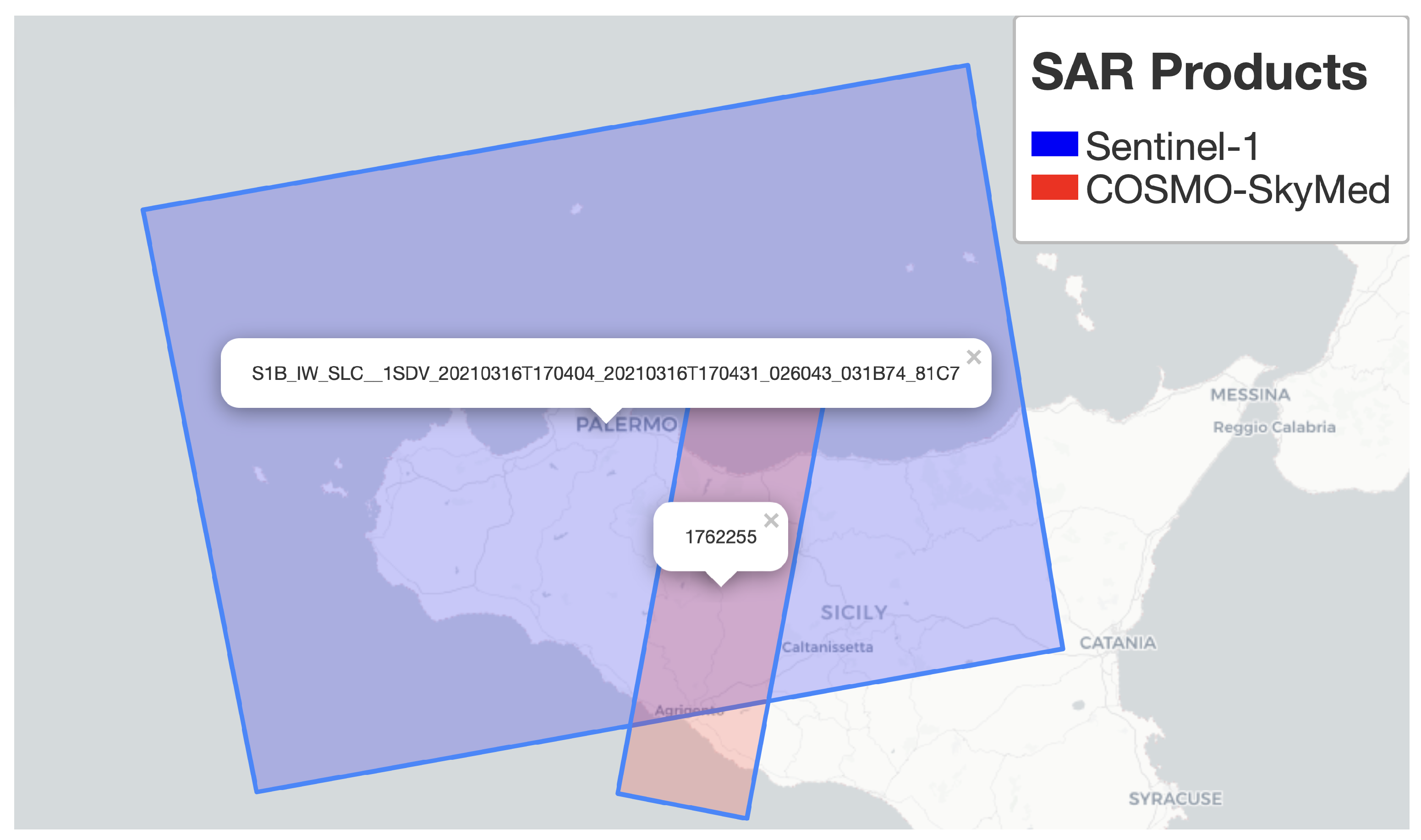
2.2. Footprint Matching
| Algorithm 1: Footprint matching MM/MF SAR products. |
| Input: MM/MF Products for each product do for each product with do if then if and cover the same area of interest then ; return ; |
2.3. AIS Data
3. Method
3.1. Pre-Processing Chains
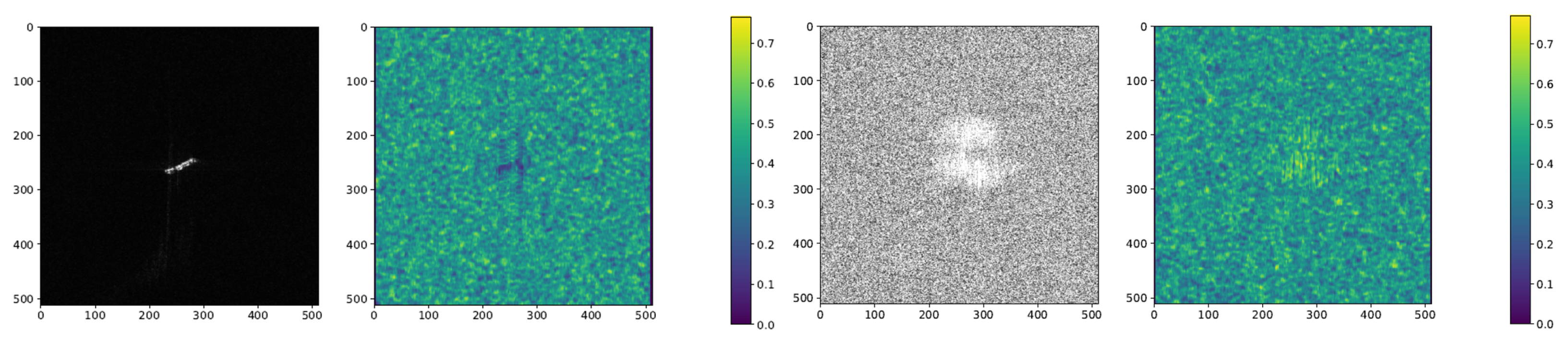
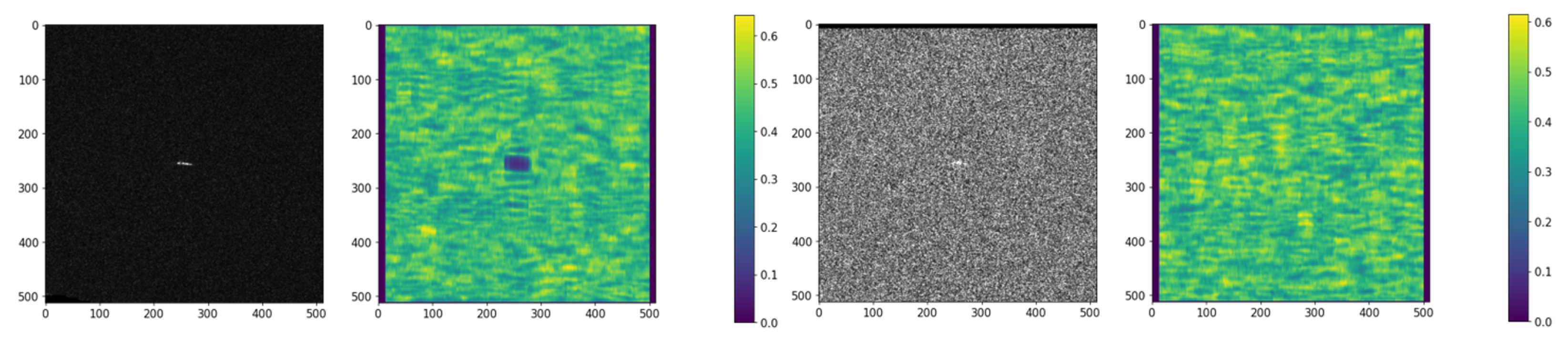
3.2. The CFAR+SLA Detector
| Algorithm 2: CFAR algorithm. |
| Input: data, background, guard, and target window size, threshold T Step 0: Raster Tiling input data (1px stride); for each tile do 1: Using the nested windows: background, guard, and target window: 1.1 Calculate the average value of the background window; 1.2 Calculate the standard deviation of the background window; 1.3 Calculate the average value of the target window; 2: Use Equation (2): if True then ; 3: Cluster continuous pixels marked as target; 3.1 Apply Geometric Discrimination; return |
4. Experimental Analysis
4.1. Performance Indicators
4.2. Local Analysis
4.3. Global Analysis
4.3.1. Egadi Islands
4.3.2. Sardinia
4.3.3. Adriatic Sea
4.3.4. Area under the Curve
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Marghany, M. Nonlinear Ocean Dynamics: Synthetic Aperture Radar; Elsevier: Amsterdam, The Netherlands, 2021. [Google Scholar]
- Graziano, M.D.; D’Errico, M.; Rufino, G. Wake component detection in X-band SAR images for ship heading and velocity estimation. Remote Sens. 2016, 8, 498. [Google Scholar] [CrossRef] [Green Version]
- Graziano, M.D.; D’Errico, M.; Rufino, G. Ship heading and velocity analysis by wake detection in SAR images. Acta Astronaut. 2016, 128, 72–82. [Google Scholar] [CrossRef]
- Graziano, M.D. Preliminary results of ship detection technique by wake pattern recognition in SAR images. Remote Sens. 2020, 12, 2869. [Google Scholar] [CrossRef]
- Del Prete, R.; Graziano, M.D.; Renga, A. First results on wake detection in SAR images by deep learning. Remote Sens. 2021, 13, 4573. [Google Scholar] [CrossRef]
- Vachon, P.W.; Campbell, J.; Bjerkelund, C.; Dobson, F.; Rey, M. Ship detection by the RADARSAT SAR: Validation of detection model predictions. Can. J. Remote Sens. 1997, 23, 48–59. [Google Scholar] [CrossRef]
- Joshi, S.K.; Baumgartner, S.V. Range-Doppler tracking of ships using single-channel airborne radar data. In Proceedings of the EUSAR 2021; 13th European Conference on Synthetic Aperture Radar, VDE Conference, online, 29 March–1 April 2021; pp. 1–6. [Google Scholar]
- Eldhuset, K. An automatic ship and ship wake detection system for spaceborne SAR images in coastal regions. IEEE Trans. Geosci. Remote Sens. 1996, 34, 1010–1019. [Google Scholar] [CrossRef]
- Shao, Z.; Wu, W.; Wang, Z.; Du, W.; Li, C. Seaships: A large-scale precisely annotated dataset for ship detection. IEEE Trans. Multimed. 2018, 20, 2593–2604. [Google Scholar] [CrossRef]
- Young, W. What are vessel traffic services, and what can they really do? Navigation 1994, 41, 31–56. [Google Scholar] [CrossRef]
- Goudossis, A.; Katsikas, S.K. Towards a secure automatic identification system (AIS). J. Mar. Sci. Technol. 2019, 24, 410–423. [Google Scholar] [CrossRef] [Green Version]
- Tetreault, B. Use of the Automatic Identification System (AIS) for maritime domain awareness (MDA). In Proceedings of the OCEANS 2005 MTS/IEEE, Washington, DC, USA, 19–23 September 2005; Volume 2, pp. 1590–1594. [Google Scholar] [CrossRef]
- International Maritime Organization. “AIS Transponders”, International Maritime Organization (2017) [Online]. 2019. Available online: https://www.imo.org/en/OurWork/Safety/Pages/AIS.aspx (accessed on 7 December 2022).
- Zhang, D.; Li, J.; Wu, Q.; Liu, X.; Chu, X.; He, W. Enhance the AIS data availability by screening and interpolation. In Proceedings of the 2017 4th International Conference on Transportation Information and Safety (ICTIS), Banff, AB, Canada, 8–10 August 2017; pp. 981–986. [Google Scholar]
- Graziano, M.D.; Renga, A.; Moccia, A. Integration of Automatic Identification System (AIS) Data and Single-Channel Synthetic Aperture Radar (SAR) Images by SAR-Based Ship Velocity Estimation for Maritime Situational Awareness. Remote Sens. 2019, 11, 2196. [Google Scholar] [CrossRef] [Green Version]
- Kanjir, U.; Greidanus, H.; Oštir, K. Vessel detection and classification from spaceborne optical images: A literature survey. Remote Sens. Environ. 2018, 207, 1–26. [Google Scholar] [CrossRef] [PubMed]
- Iceye. Dark Vessel Detection for Maritime Security with SAR Data, [Online]. 2021. Available online: https://www.iceye.com/use-cases/security/dark-vessel-detection/interactive-demo (accessed on 8 March 2023).
- Curlander, J.C.; McDonough, R.N. Synthetic Aperture Radar; Wiley: New York, NY, USA, 1991; Volume 11. [Google Scholar]
- Wackerman, C.C.; Friedman, K.S.; Pichel, W.G.; Clemente-Colón, P.; Li, X. Automatic detection of ships in RADARSAT-1 SAR imagery. Can. J. Remote Sens. 2001, 27, 568–577. [Google Scholar] [CrossRef]
- Friedman, K.; Wackerman, C.; Funk, F.; Rowell, K.; Pichel, W.; Clemente-Colón, P.; Li, X. Validation of an automatic vessel detection algorithm using SAR data and known vessel fleet distributions. In Proceedings of the IGARSS 2000. IEEE 2000 International Geoscience and Remote Sensing Symposium. Taking the Pulse of the Planet: The Role of Remote Sensing in Managing the Environment. Proceedings (Cat. No. 00CH37120), Honolulu, HI, USA, 24ߝ28 July 2000; IEEE: New York, NY, USA, 2000; Volume 5, pp. 2071–2073. [Google Scholar]
- Friedman, K.S.; Wackerman, C.; Funk, F.; Schwenzfeier, M.; Pichel, W.G.; Colon-Clemente, P.; Li, X. Analyzing the dependence between RADARSAT-1 vessel detection and vessel heading using CFAR algorithm for use on fishery management. In Proceedings of the Oceans 2003. Celebrating the Past… Teaming Toward the Future (IEEE Cat. No. 03CH37492), San Diego, CA, USA, 22–26 September 2003; Volume 5, pp. P2819–P2823. [Google Scholar]
- Friedman, K.S.; Wackerman, C.; Funk, F.; Pichel, W.G.; Clemente-Colón, P.; Li, X. Validation of a CFAR vessel detection algorithm using known vessel locations. In Proceedings of the IGARSS 2001. Scanning the Present and Resolving the Future, Proceedings. IEEE 2001 International Geoscience and Remote Sensing Symposium (Cat. No. 01CH37217), Sydney, Australia, 9–13 July 2001; Volume 4, pp. 1804–1806. [Google Scholar]
- Renga, A.; Graziano, M.D.; Moccia, A. Segmentation of marine SAR images by sublook analysis and application to sea traffic monitoring. IEEE Trans. Geosci. Remote Sens. 2018, 57, 1463–1477. [Google Scholar] [CrossRef]
- Guarnieri, A.M. Adaptive removal of azimuth ambiguities in SAR images. IEEE Trans. Geosci. Remote Sens. 2005, 43, 625–633. [Google Scholar] [CrossRef]
- Choi, J.H.; Won, J.S. Efficient SAR Azimuth Ambiguity Reduction in Coastal Waters Using a Simple Rotation Matrix: The Case Study of the Northern Coast of Jeju Island. Remote Sens. 2021, 13, 4865. [Google Scholar] [CrossRef]
- Velotto, D.; Soccorsi, M.; Lehner, S. Azimuth ambiguities removal for ship detection using full polarimetric X-band SAR data. IEEE Trans. Geosci. Remote Sens. 2013, 52, 76–88. [Google Scholar] [CrossRef]
- Pelich, R.; Longépé, N.; Mercier, G.; Hajduch, G.; Garello, R. AIS-based evaluation of target detectors and SAR sensors characteristics for maritime surveillance. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2014, 8, 3892–3901. [Google Scholar] [CrossRef] [Green Version]
- Wang, C.; Bi, F.; Zhang, W.; Chen, L. An intensity-space domain CFAR method for ship detection in HR SAR images. IEEE Geosci. Remote Sens. Lett. 2017, 14, 529–533. [Google Scholar] [CrossRef]
- Raney, R.K.; Princz, G.J. Reconsideration of azimuth ambiguities in SAR. IEEE Trans. Geosci. Remote Sens. 1987, GE-25, 783–787. [Google Scholar] [CrossRef]
- Touzi, R.; Hurley, J.; Vachon, P.W. Optimization of the degree of polarization for enhanced ship detection using polarimetric RADARSAT-2. IEEE Trans. Geosci. Remote Sens. 2015, 53, 5403–5424. [Google Scholar] [CrossRef]
- Touzi, R. On the use of polarimetric SAR data for ship detection. In Proceedings of the IEEE 1999 International Geoscience and Remote Sensing Symposium. IGARSS’99 (Cat. No. 99CH36293), Hamburg, Germany, 28 June–2 July 1999; Volume 2, pp. 812–814. [Google Scholar]
- Brekke, C.; Anfinsen, S.N. Ship detection in ice-infested waters based on dual-polarization SAR imagery. IEEE Geosci. Remote Sens. Lett. 2010, 8, 391–395. [Google Scholar] [CrossRef]
- Marino, A.; Sanjuan-Ferrer, M.J.; Hajnsek, I.; Ouchi, K. Ship detection with spectral analysis of synthetic aperture radar: A comparison of new and well-known algorithms. Remote Sens. 2015, 7, 5416–5439. [Google Scholar] [CrossRef]
- Wang, W.; Ji, Y.; Lin, X. A novel fusion-based ship detection method from Pol-SAR images. Sensors 2015, 15, 25072–25089. [Google Scholar] [CrossRef]
- Xie, Q.; Ballester-Berman, J.D.; Lopez-Sanchez, J.M.; Zhu, J.; Wang, C. Quantitative analysis of polarimetric model-based decomposition methods. Remote Sens. 2016, 8, 977. [Google Scholar] [CrossRef] [Green Version]
- Zhu, J.; Qiu, X.; Pan, Z.; Zhang, Y.; Lei, B. Projection shape template-based ship target recognition in TerraSAR-X images. IEEE Geosci. Remote Sens. Lett. 2016, 14, 222–226. [Google Scholar] [CrossRef]
- Wang, C.; Bi, F.; Chen, L.; Chen, J. A novel threshold template algorithm for ship detection in high-resolution SAR images. In Proceedings of the 2016 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Beijing, China, 10–15 July 2016; pp. 100–103. [Google Scholar]
- Song, S.; Xu, B.; Yang, J. SAR target recognition via supervised discriminative dictionary learning and sparse representation of the SAR-HOG feature. Remote Sens. 2016, 8, 683. [Google Scholar] [CrossRef] [Green Version]
- Zhou, D.; Zeng, L.; Zhang, K. A novel SAR target detection algorithm via multi-scale SIFT features. J. Northwest. Polytech. Univ. 2015, 33, 867–873. [Google Scholar]
- Ai, J.; Tian, R.; Luo, Q.; Jin, J.; Tang, B. Multi-scale rotation-invariant Haar-like feature integrated CNN-based ship detection algorithm of multiple-target environment in SAR imagery. IEEE Trans. Geosci. Remote Sens. 2019, 57, 10070–10087. [Google Scholar] [CrossRef]
- Zhang, T.; Zhang, X. High-speed ship detection in SAR images based on a grid convolutional neural network. Remote Sens. 2019, 11, 1206. [Google Scholar] [CrossRef] [Green Version]
- Chen, C.; He, C.; Hu, C.; Pei, H.; Jiao, L. A deep neural network based on an attention mechanism for SAR ship detection in multiscale and complex scenarios. IEEE Access 2019, 7, 104848–104863. [Google Scholar] [CrossRef]
- Zhang, T.; Zhang, X.; Shi, J.; Wei, S. Depthwise separable convolution neural network for high-speed SAR ship detection. Remote Sens. 2019, 11, 2483. [Google Scholar] [CrossRef] [Green Version]
- Wang, Y.; Wang, C.; Zhang, H.; Dong, Y.; Wei, S. A SAR dataset of ship detection for deep learning under complex backgrounds. Remote Sens. 2019, 11, 765. [Google Scholar] [CrossRef] [Green Version]
- Chang, Y.L.; Anagaw, A.; Chang, L.; Wang, Y.C.; Hsiao, C.Y.; Lee, W.H. Ship detection based on YOLOv2 for SAR imagery. Remote Sens. 2019, 11, 786. [Google Scholar] [CrossRef] [Green Version]
- Jiao, J.; Zhang, Y.; Sun, H.; Yang, X.; Gao, X.; Hong, W.; Fu, K.; Sun, X. A densely connected end-to-end neural network for multiscale and multiscene SAR ship detection. IEEE Access 2018, 6, 20881–20892. [Google Scholar] [CrossRef]
- Li, J.; Qu, C.; Shao, J. Ship detection in SAR images based on an improved faster R-CNN. In Proceedings of the 2017 SAR in Big Data Era: Models, Methods and Applications (BIGSARDATA), Beijing, China, 13–14 November 2017; pp. 1–6. [Google Scholar]
- Wei, S.; Zeng, X.; Qu, Q.; Wang, M.; Su, H.; Shi, J. HRSID: A high-resolution SAR images dataset for ship detection and instance segmentation. IEEE Access 2020, 8, 120234–120254. [Google Scholar] [CrossRef]
- Colin, A.; Fablet, R.; Tandeo, P.; Husson, R.; Peureux, C.; Longépé, N.; Mouche, A. Semantic segmentation of metoceanic processes using SAR observations and deep learning. Remote Sens. 2022, 14, 851. [Google Scholar] [CrossRef]
- Biffia, A.; Dodaro, L.; Morabito, F.; Pergolizzi, A. Mare Monstrum. 2020. Available online: https://www.legambiente.it/wp-content/uploads/Dossier-Mare-Monstrum-2019.pdf (accessed on 13 December 2022).
- Biffia, A.; Dodaro, L.; Morabito, F.; Pergolizzi, A. Mare Monstrum. 2019. Available online: https://www.legambiente.it/wp-content/uploads/2020/06/MareMonstrum2020.pdf (accessed on 13 December 2022).
- Furesi, R.; Madau, F.; Pulina, P.; Sai, R.; Pinna, M.; Pais, A. Profitability and sustainability of edible sea urchin fishery in Sardinia (Italy). J. Coast. Conserv. 2016, 20, 299–306. [Google Scholar] [CrossRef]
- Spera, G.; Monaco, P. Rapporto Annuale sul Controllo Della Pesca in Italia. 2019. Available online: https://www.guardiacostiera.gov.it/stampa/Documents/RAPPORTO%20ANNUALE%202020%20-%20DOWNLOAD.pdf (accessed on 13 December 2022).
- Graziano, M.D.; Prete, R.D.; Grasso, M. A New Dataset of Multi-Mission/multi-Frequency sar Data for Maritime Monitoring: First Results and Critical Analysis. 2022. Available online: https://iafastro.directory/iac/paper/id/74577/summary/ (accessed on 13 December 2022).
- Miler, R.K. The Exactearth Satelite-AIS Benefits for the Maritime Transport. Prace Naukowe Wyższej Szkoły Bankowej w Gdańsku 2013, 28, 71–86. [Google Scholar]
- Dellepiane, S.; De Laurentiis, R.; Giordano, F. Coastline extraction from SAR images and a method for the evaluation of the coastline precision. Pattern Recognit. Lett. 2004, 25, 1461–1470. [Google Scholar] [CrossRef]
- Open Street Map. “Data Derived from OpenStreetMap for Download”, Open Street Map [Online]. 2022. Available online: https://osmdata.openstreetmap.de/data/land-polygons.html (accessed on 7 December 2022).
- Benachenhou, K.; Taleb-Ahmed, A.; Hamadouche, M. Performances evaluation of GNSS ALTBOC acquisition with CFAR detection in Rayleigh fading channel. In Proceedings of the 2013 Saudi International Electronics, Communications and Photonics Conference, Riyadh, Saudi Arabia, 27–30 April 2013; pp. 1–7. [Google Scholar]
- Guida, M.; Longo, M.; Lops, M. Biparametric CFAR procedures for lognormal clutter. IEEE Trans. Aerosp. Electron. Syst. 1993, 29, 798–809. [Google Scholar] [CrossRef]
- Anastassopoulos, V.; Lampropoulos, G.A. Optimal CFAR detection in Weibull clutter. IEEE Trans. Aerosp. Electron. Syst. 1995, 31, 52–64. [Google Scholar] [CrossRef]
- Erfanian, S.; Vakili, V.T. Introducing excision switching-CFAR in K distributed sea clutter. Signal Process. 2009, 89, 1023–1031. [Google Scholar] [CrossRef]
- Leng, X.; Ji, K.; Yang, K.; Zou, H. A Bilateral CFAR Algorithm for Ship Detection in SAR Images. IEEE Geosci. Remote Sens. Lett. 2015, 12, 1536–1540. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Mission | Acquisition Mode | Pixel Spacing (range × azi) (m) | Polarization | Swath (km) |
|---|---|---|---|---|
| COSMO-SkyMed | StripMap | 0.5 × 0.5 | HH | 40 |
| Sentinel-1 | IW (Interferometric Wide Swath) | 2.3 × 13.9 | VH | 250 |
| SAOCOM | StripMap | <10 × 10 | VH | 65 |
| Region | Adriatic Sea | Egadi Islands | Sardinia | |
|---|---|---|---|---|
| Pairing | ||||
| COSMO-SkyMed and Sentinel-1 | 15 | 32 | 55 | |
| COSMO-SkyMed and SAOCOM | 5 | NA | 23 | |
| Sentinel-1 and SAOCOM | 12 | NA | 10 | |
| Product | COSMO-SkyMed | SAOCOM | Sentinel-1 | |
|---|---|---|---|---|
| Operator | ||||
| Multilook | ✓ | |||
| Thermal noise removal | ✓ | |||
| TOPSAR deburst | ✓ | ✓ | ||
| Land masking | ✓ | ✓ | ✓ | |
| Calibration | ✓ | ✓ | ||
| Mission | Sentinel-1 | COSMO-SkyMed | SAOCOM | |
|---|---|---|---|---|
| Parameter | ||||
| 102.0 Hz | 466.6 Hz | 372.0 Hz | ||
| 102.0 Hz | 466.6 Hz | 372.0 Hz | ||
| 7, 17 | 17, 17 | 3, 17 | ||
| BW | GW | TW | PFA () | Min Target Size | Max Target Size |
|---|---|---|---|---|---|
| 800 m | 400 m | 30 m | 4.5 | 30 m | 800 m |
| Accuracy | CFAR | CFAR+SLA | |||
|---|---|---|---|---|---|
| Vessels | 92.3% | ||||
| Ambiguities | 100% | ||||
| Global | 95.6% | 100% | 47.8% | 100% | 7.6% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Del Prete, R.; Graziano, M.D.; Renga, A. Unified Framework for Ship Detection in Multi-Frequency SAR Images: A Demonstration with COSMO-SkyMed, Sentinel-1, and SAOCOM Data. Remote Sens. 2023, 15, 1582. https://doi.org/10.3390/rs15061582
Del Prete R, Graziano MD, Renga A. Unified Framework for Ship Detection in Multi-Frequency SAR Images: A Demonstration with COSMO-SkyMed, Sentinel-1, and SAOCOM Data. Remote Sensing. 2023; 15(6):1582. https://doi.org/10.3390/rs15061582
Chicago/Turabian StyleDel Prete, Roberto, Maria Daniela Graziano, and Alfredo Renga. 2023. "Unified Framework for Ship Detection in Multi-Frequency SAR Images: A Demonstration with COSMO-SkyMed, Sentinel-1, and SAOCOM Data" Remote Sensing 15, no. 6: 1582. https://doi.org/10.3390/rs15061582
APA StyleDel Prete, R., Graziano, M. D., & Renga, A. (2023). Unified Framework for Ship Detection in Multi-Frequency SAR Images: A Demonstration with COSMO-SkyMed, Sentinel-1, and SAOCOM Data. Remote Sensing, 15(6), 1582. https://doi.org/10.3390/rs15061582