



Weakening the Flicker Noise in GPS Vertical Coordinate Time Series Using Hybrid Approaches

Abstract
:
1. Introduction
2. Methods
2.1. The Principles of CEEMD, WD, and VMD
2.1.1. Complementary Ensemble Empirical Mode Decomposition (CEEMD)
2.1.2. Wavelet Denoising (WD)
2.1.3. Variational Mode Decomposition (VMD)
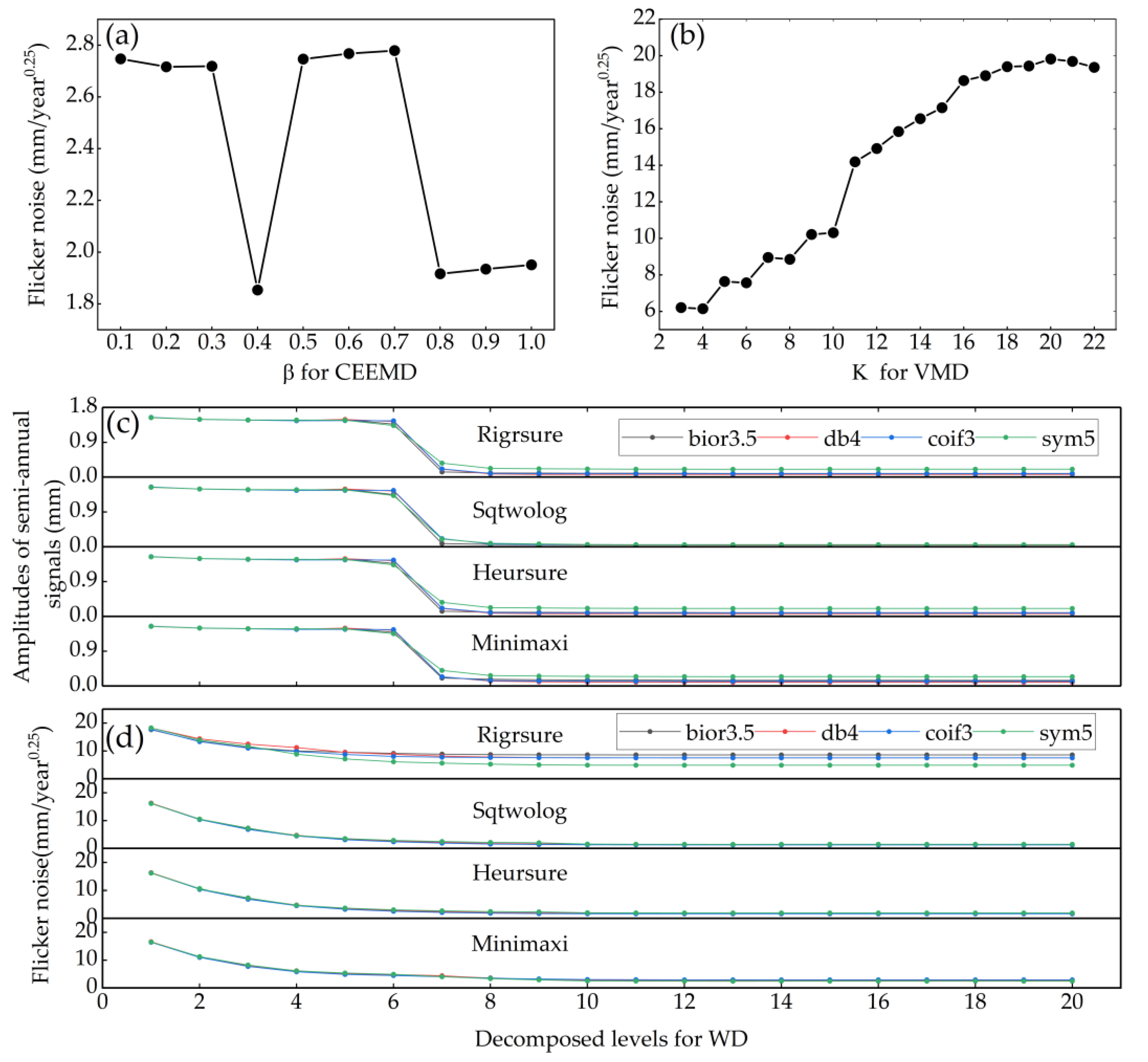
2.2. Parameters of CEEMD, VMD, and WD
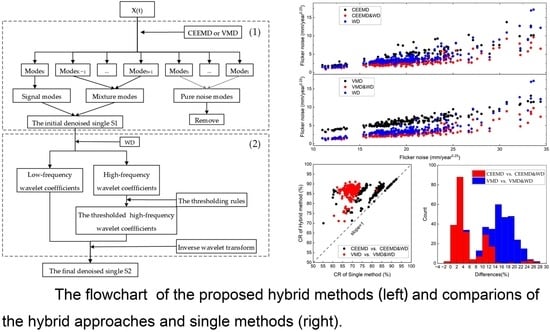
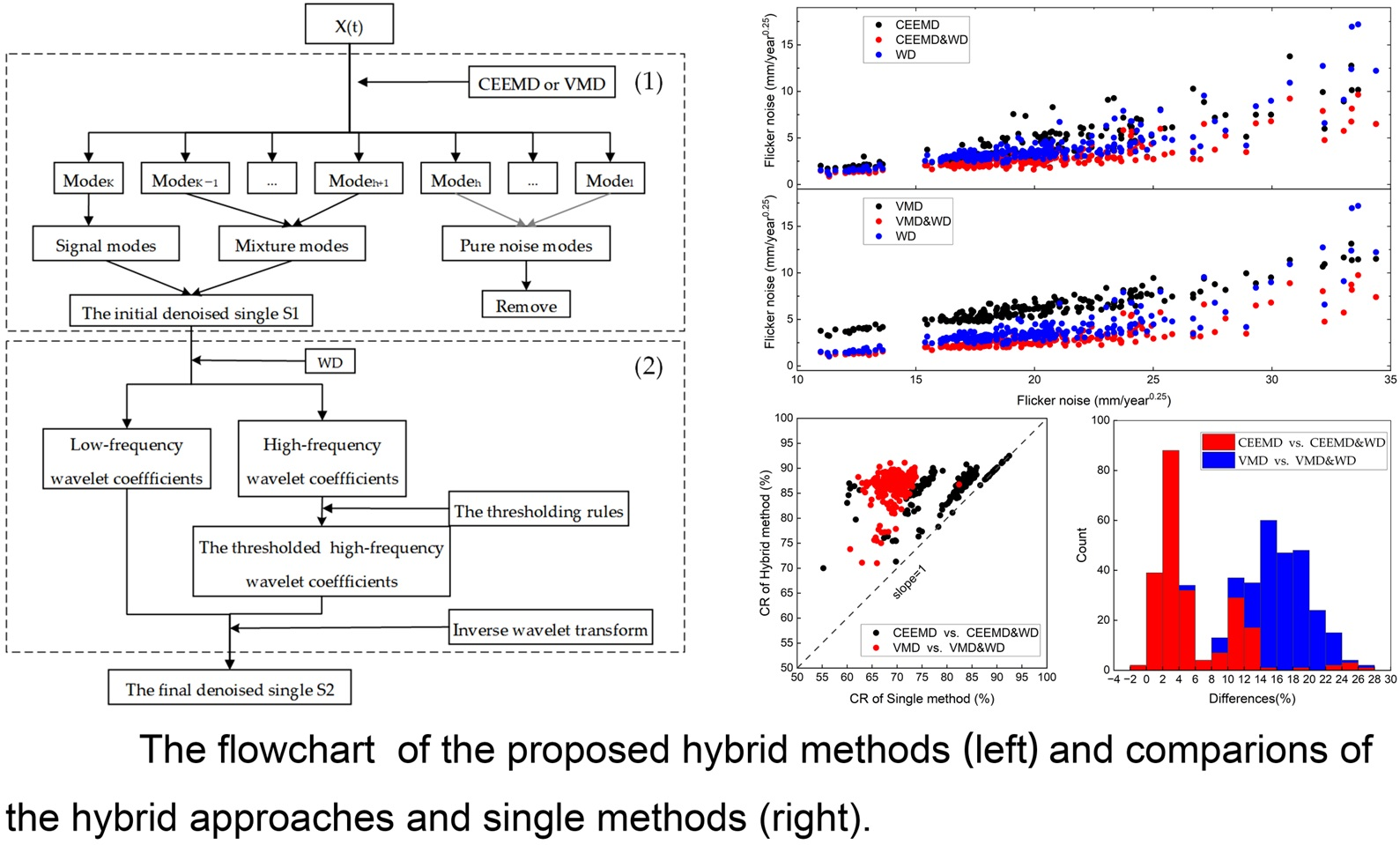
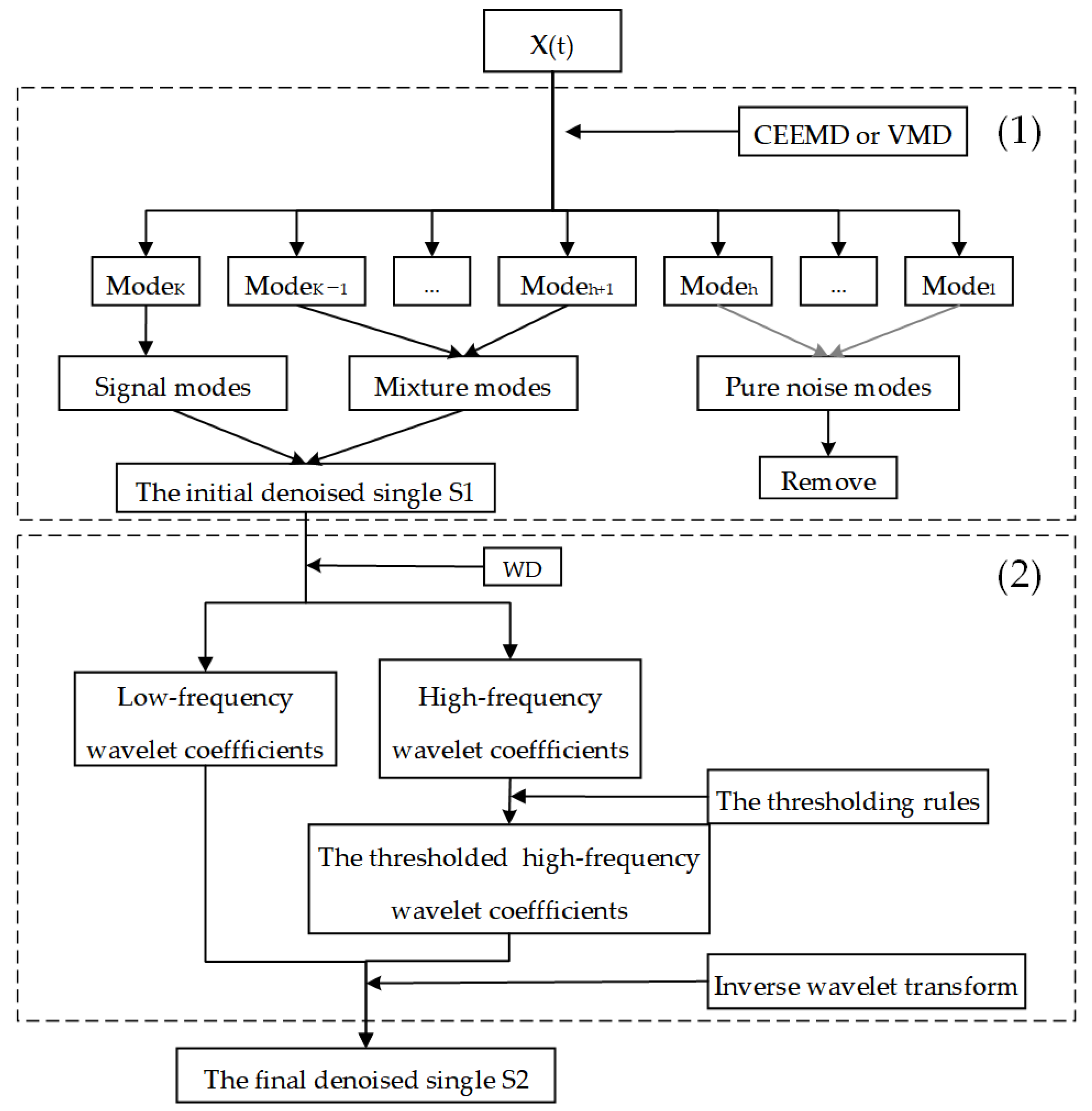
2.3. Proposed Mixture Methods
- i.
- The coordinate time series of a GPS station, , is decomposed into modes by CEEMD or VMD.
- ii.
- Based on the criterion of the Hausdorff distance, the modes are classified into two types, including pure noise modes and signal modes.
- iii.
- The pure noise modes are eliminated directly and signal modes are reconstructed to obtain the initial denoised signal .
- iv.
- WD is performed to decompose the signal , then the high-frequency and low-frequency wavelet coefficients are obtained by wavelet transform.
- v.
- The thresholding rules are applied to high-frequency wavelet coefficients.
- vi.
- The thresholded high-frequency wavelet coefficients and low-frequency wavelet coefficients are reconstructed by the inverse wavelet transform to obtain the final denoised signal .
2.4. The Trajectory Model of the GPS Time Series
3. Data and Experimental Design
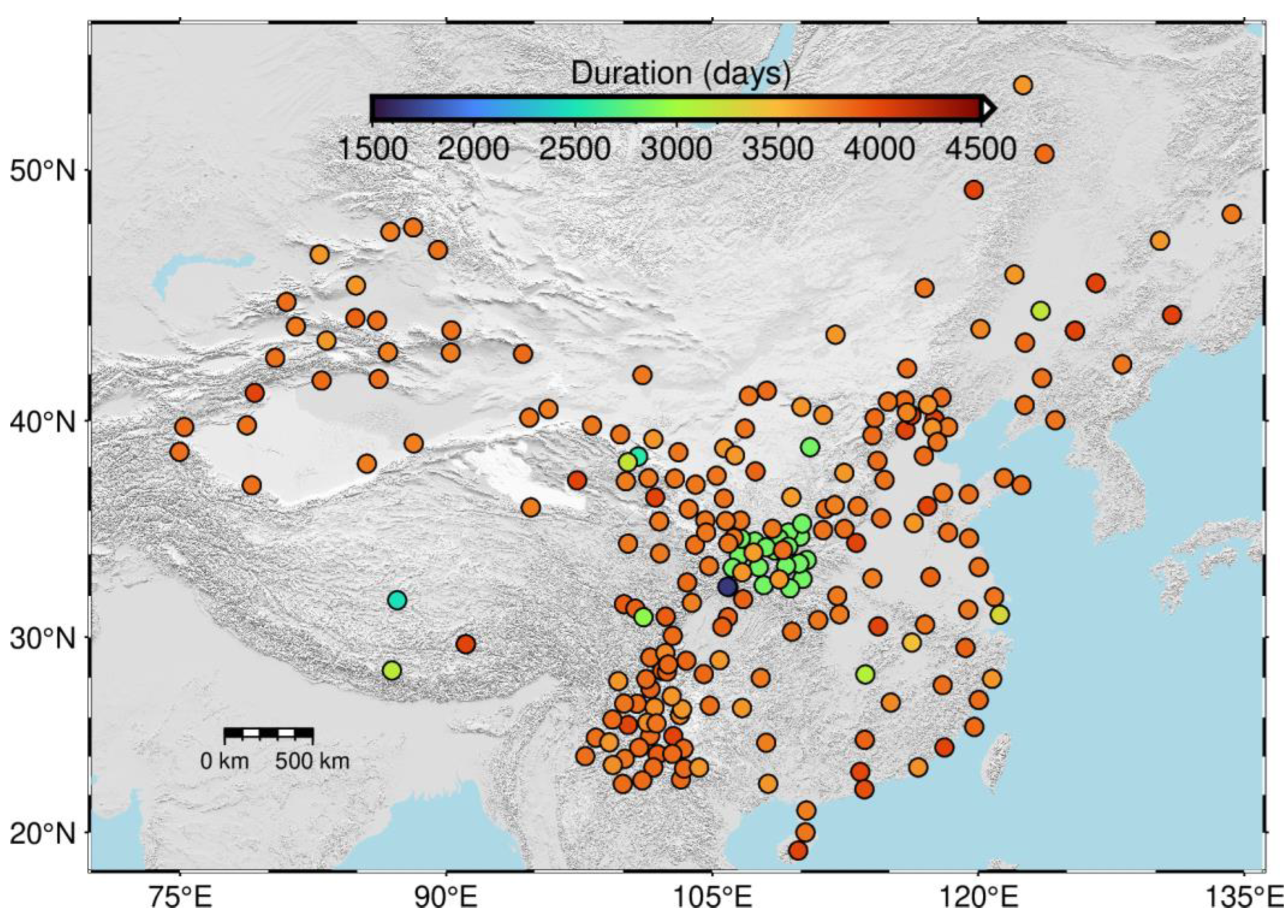
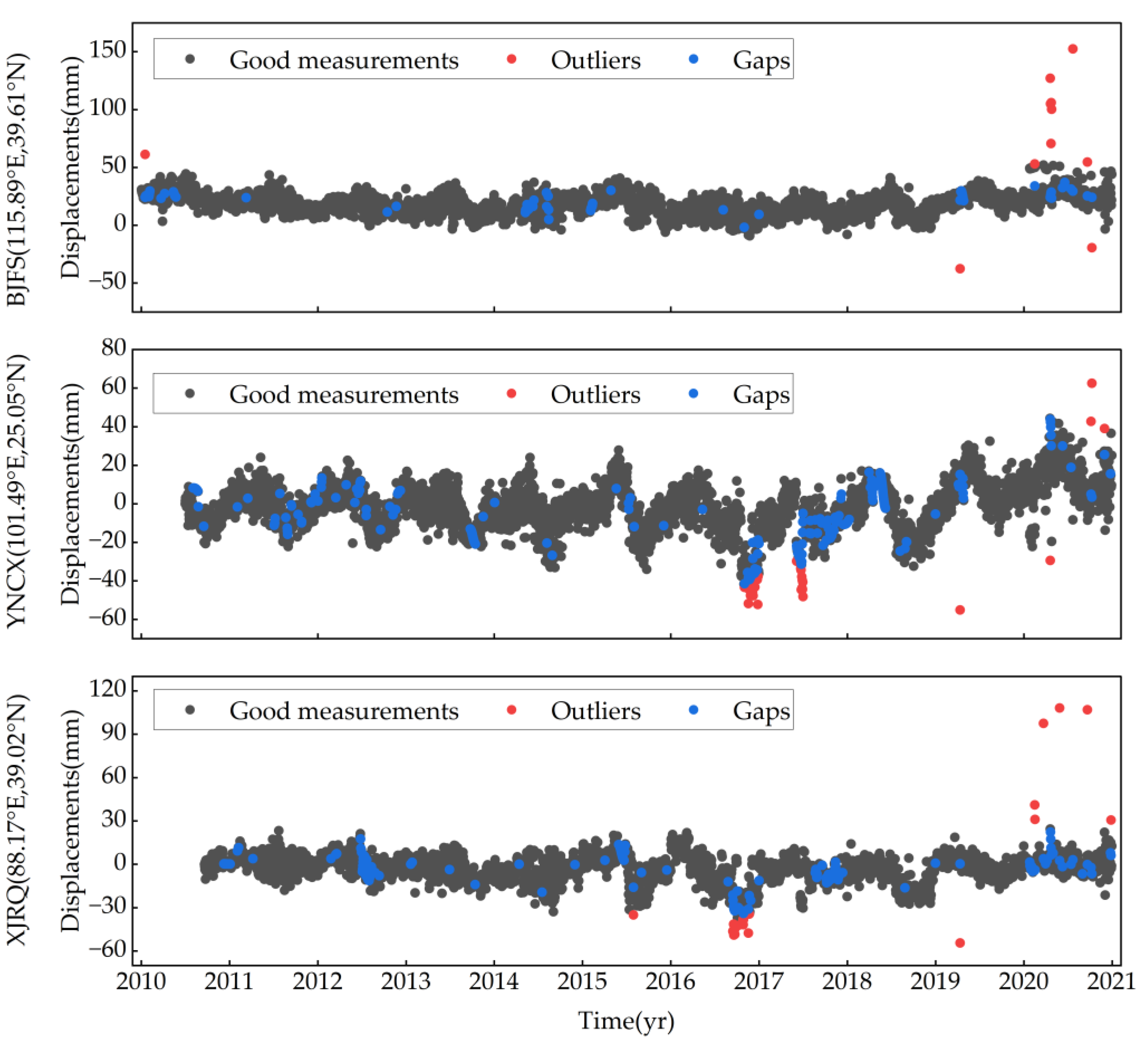
3.1. GPS Data
3.2. Experimental Design
4. Results
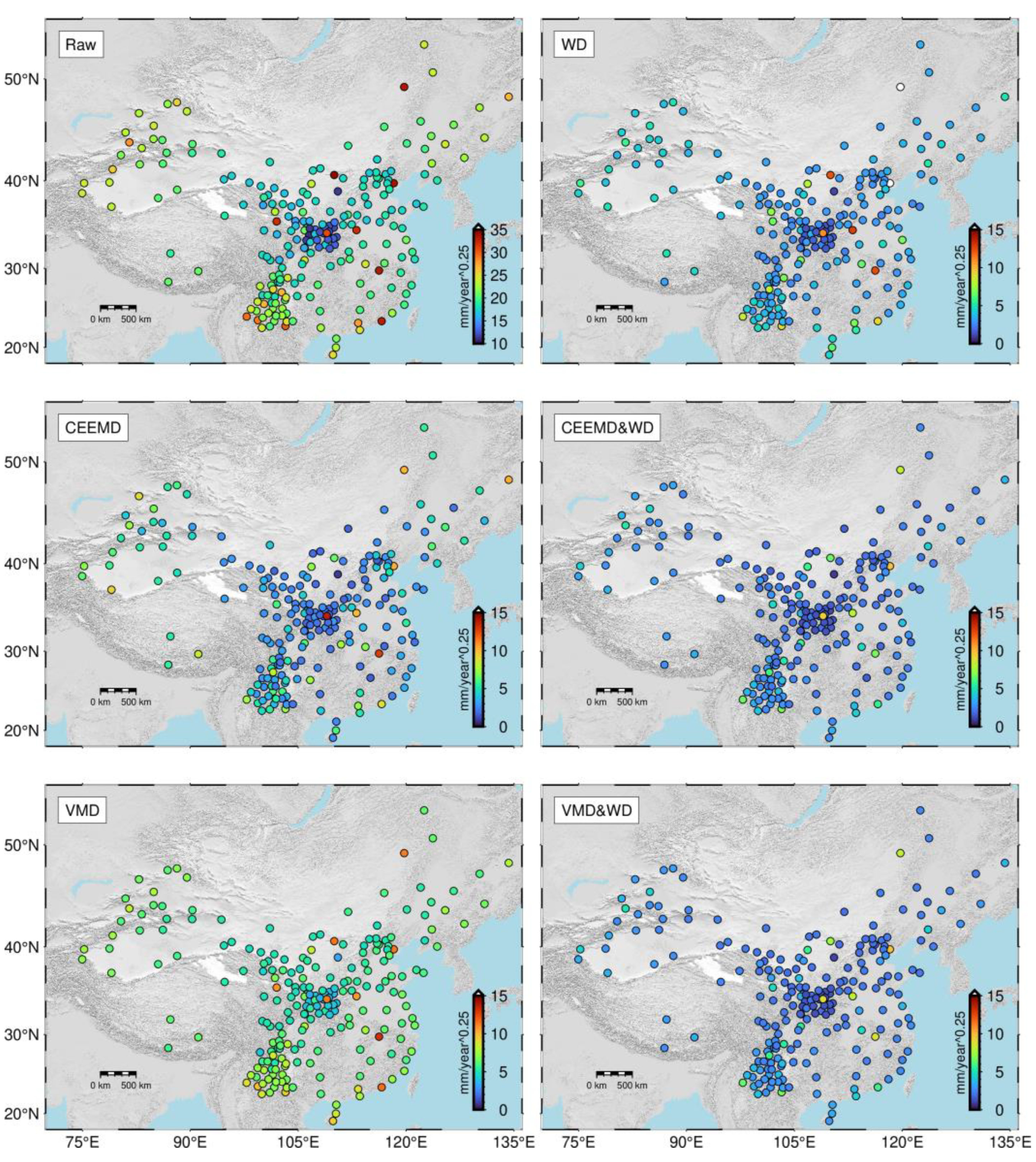
4.1. Flicker Noises in the GPS Time Series
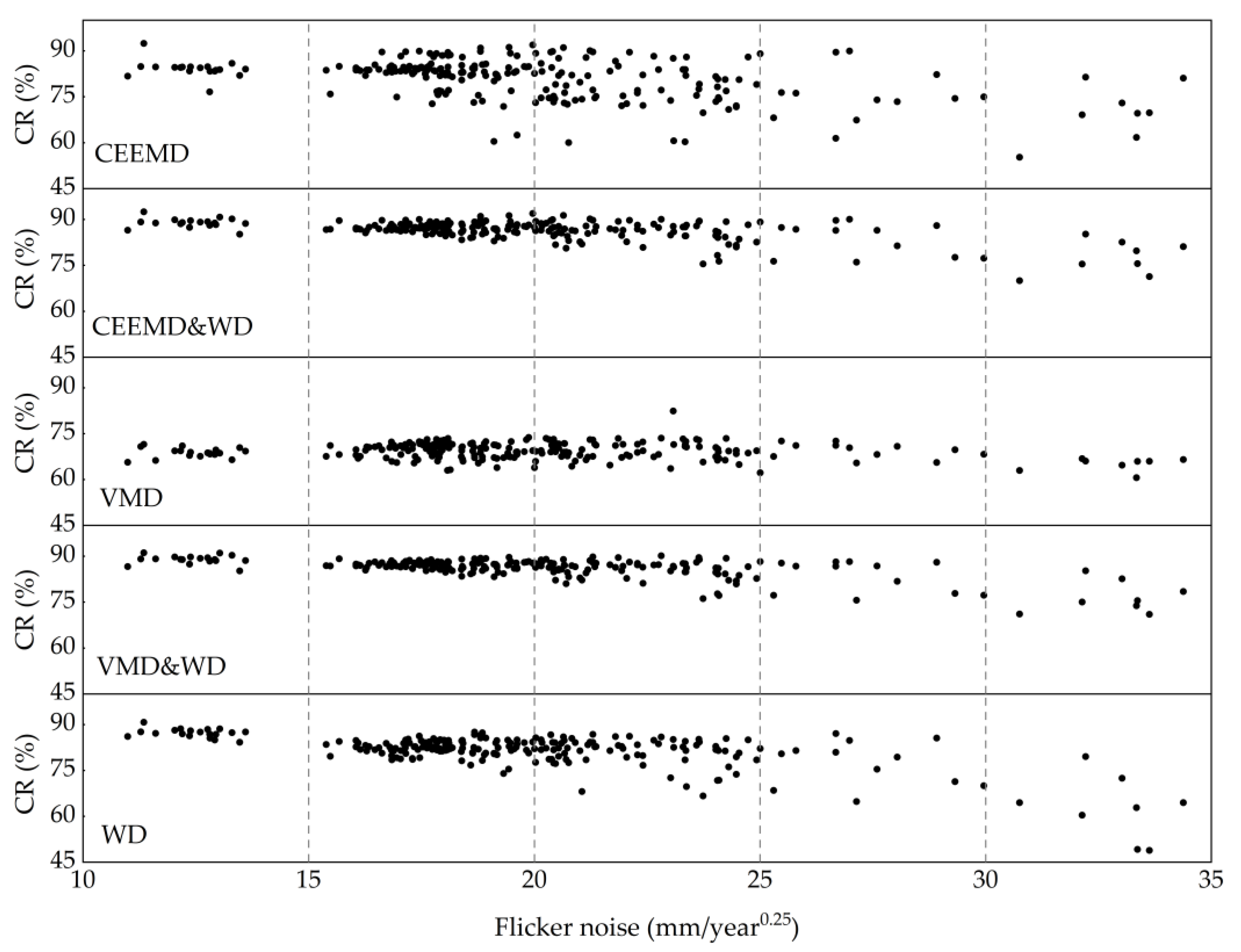
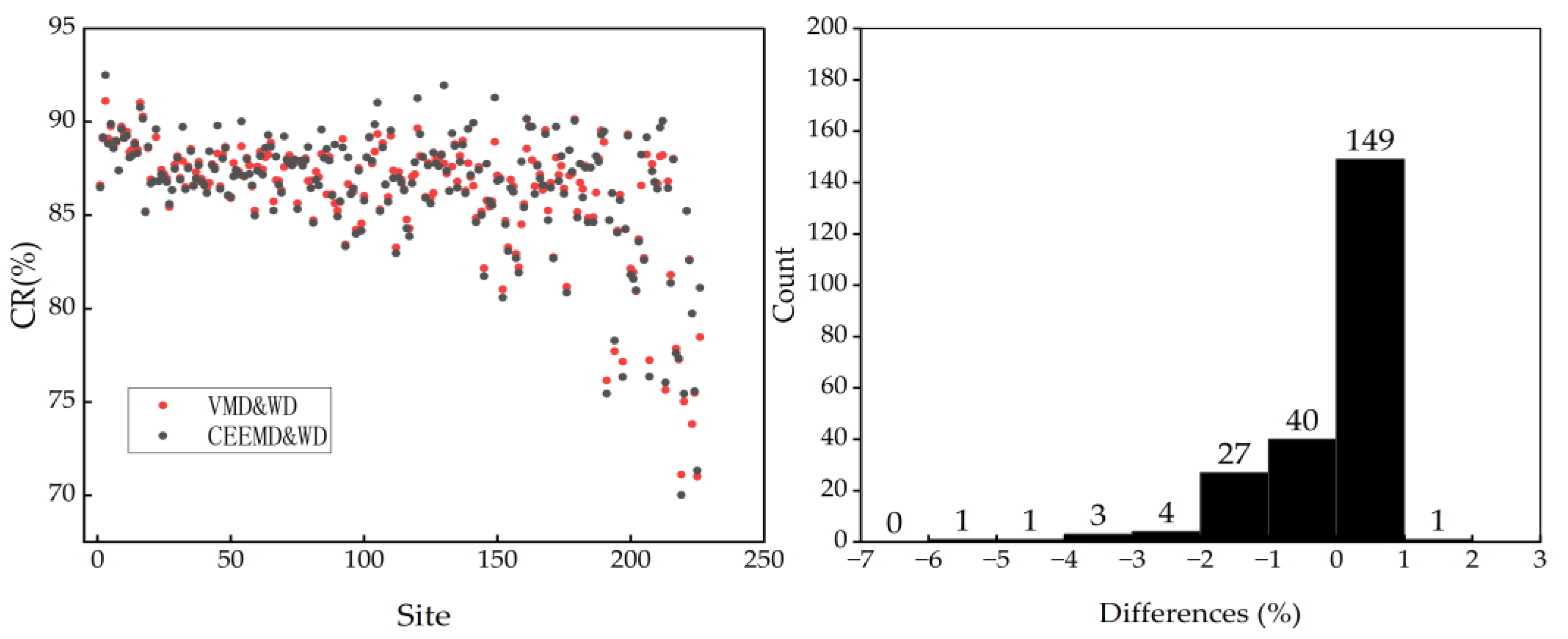
4.2. Correction Rate of Flicker Noise
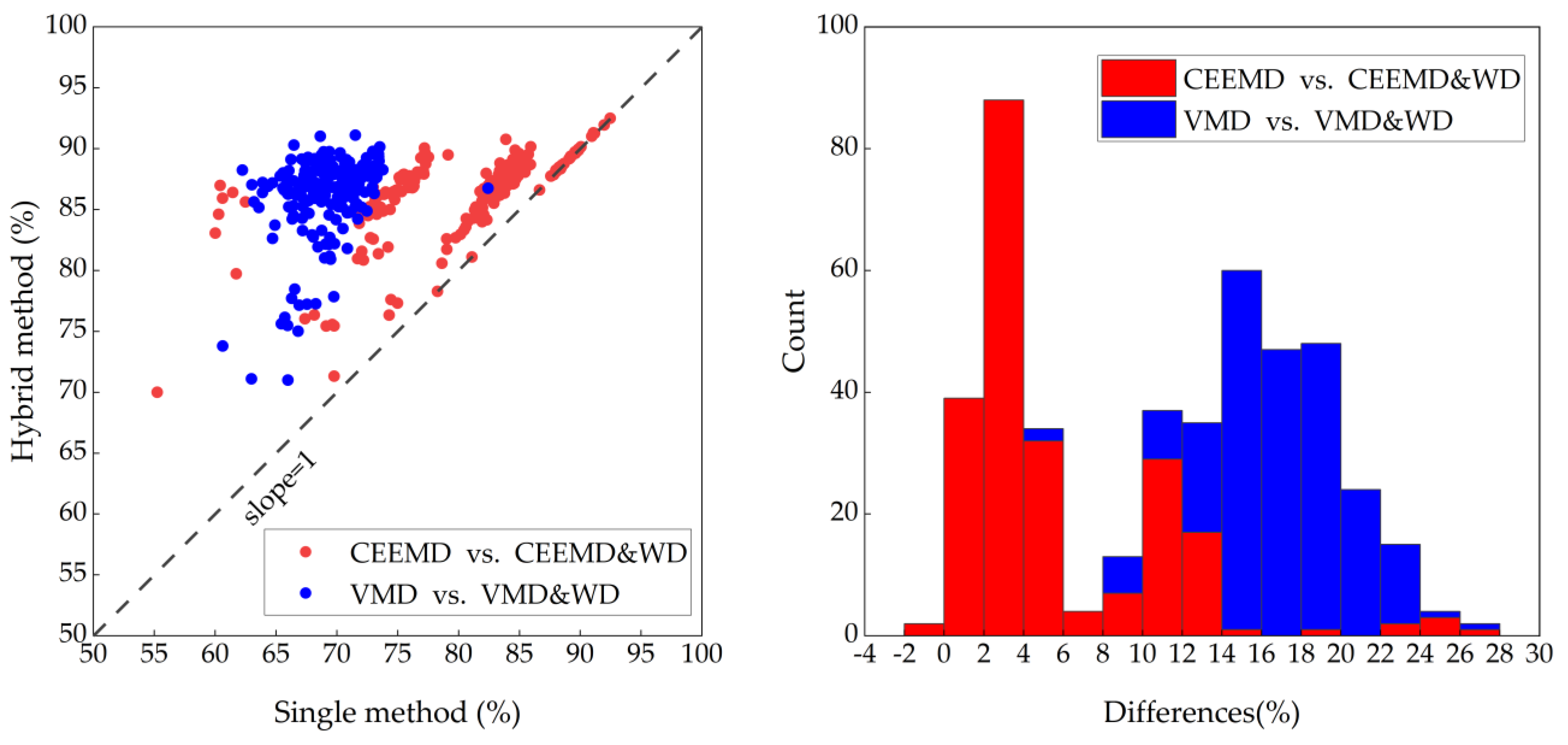
4.3. Comparison of Hybrid Algorithms and Single Algorithms
5. Discussions
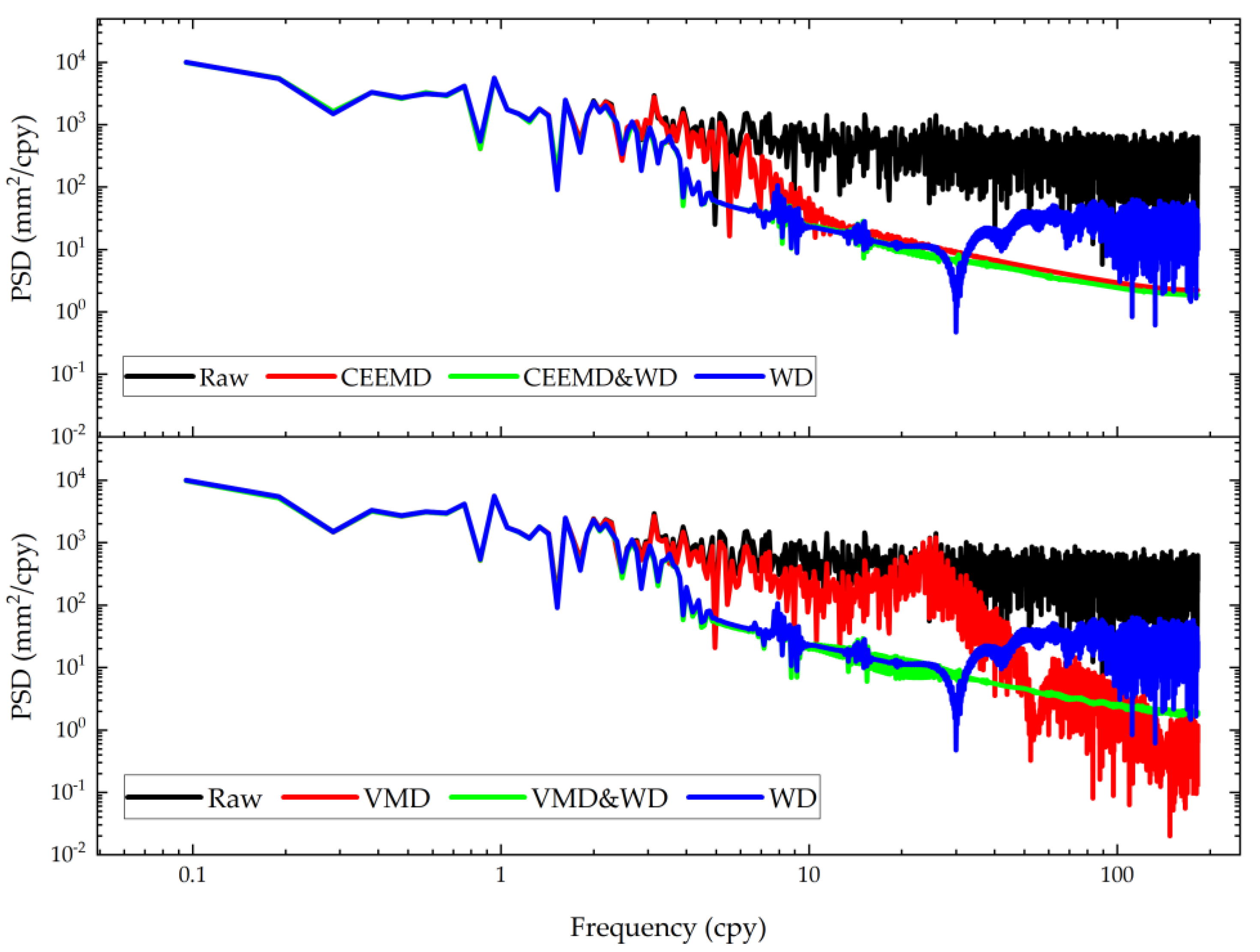
5.1. The Comparisons of the Power Spectral Density
5.2. The Adaptability of Optimal Parameters
5.3. Analysis of the Performance of the Vmd Method
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A
Appendix B
References
- Prawirodirdjo, L.; Bock, Y. Instantaneous global plate motion model from 12 years of continuous GPS observations. J. Geophys. Res. Solid Earth 2004, 109, 2944. [Google Scholar] [CrossRef]
- Wang, Q.; Zhang, P.-Z.; Freymueller, J.T.; Bilham, R.; Larson, K.M.; Lai, X.a.; You, X.; Niu, Z.; Wu, J.; Li, Y. Present-day crustal deformation in China constrained by global positioning system measurements. Science 2001, 294, 574–577. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Wallace, L.M.; Beavan, J.; McCaffrey, R.; Berryman, K.; Denys, P. Balancing the plate motion budget in the South Island, New Zealand using GPS, geological and seismological data. Geophys. J. Int. 2007, 168, 332–352. [Google Scholar] [CrossRef] [Green Version]
- Liang, S.; Gan, W.; Shen, C.; Xiao, G.; Liu, J.; Chen, W.; Ding, X.; Zhou, D. Three-dimensional velocity field of present-day crustal motion of the Tibetan Plateau derived from GPS measurements. J. Geophys. Res. Solid Earth 2013, 118, 5722–5732. [Google Scholar] [CrossRef]
- Hao, M.; Li, Y.; Zhuang, W. Crustal movement and strain distribution in East Asia revealed by GPS observations. Sci. Rep. 2019, 9, 16797. [Google Scholar] [CrossRef] [Green Version]
- Tian, Z.; Freymueller, J.T.; Yang, Z. Spatio-temporal variations of afterslip and viscoelastic relaxation following the Mw 7.8 Gorkha (Nepal) earthquake. Earth Planet. Sci. Lett. 2020, 532, 116031. [Google Scholar] [CrossRef]
- Altamimi, Z.; Rebischung, P.; Métivier, L.; Collilieux, X. ITRF2014: A new release of the International Terrestrial Reference Frame modeling nonlinear station motions. J. Geophys. Res. Solid Earth 2016, 121, 6109–6131. [Google Scholar] [CrossRef] [Green Version]
- Collilieux, X.; Métivier, L.; Altamimi, Z.; van Dam, T.; Ray, J. Quality assessment of GPS reprocessed terrestrial reference frame. GPS Solut. 2011, 15, 219–231. [Google Scholar] [CrossRef]
- Hao, M.; Freymueller, J.T.; Wang, Q.; Cui, D.; Qin, S. Vertical crustal movement around the southeastern Tibetan Plateau constrained by GPS and GRACE data. Earth Planet. Sci. Lett. 2016, 437, 1–8. [Google Scholar] [CrossRef]
- Li, W.; Shum, C.K.; Li, F.; Zhang, S.; Ming, F.; Chen, W.; Zhang, B.; Lei, J.; Zhang, Q. Contributions of Greenland GPS Observed Deformation from Multisource Mass Loading Induced Seasonal and Transient Signals. Geophys. Res. Lett. 2020, 47, e2020GL088627. [Google Scholar] [CrossRef]
- Mémin, A.; Boy, J.-P.; Santamaría-Gómez, A. Correcting GPS measurements for non-tidal loading. GPS Solut. 2020, 24, 45. [Google Scholar] [CrossRef]
- Borsa, A.A.; Agnew, D.C.; Cayan, D.R. Ongoing drought-induced uplift in the western United States. Science 2014, 345, 1587–1590. [Google Scholar] [CrossRef] [PubMed]
- Carlson, G.; Werth, S.; Shirzaei, M. Joint Inversion of GNSS and GRACE for Terrestrial Water Storage Change in California. J. Geophys. Res. Solid Earth 2022, 127, e2021JB023135. [Google Scholar] [CrossRef] [PubMed]
- Amiri-Simkooei, A.R. Noise in multivariate GPS position time-series. J. Geod. 2009, 83, 175–187. [Google Scholar] [CrossRef] [Green Version]
- Klos, A.; Gruszczynska, M.; Bos, M.S.; Boy, J.-P.; Bogusz, J. Estimates of Vertical Velocity Errors for IGS ITRF2014 Stations by Applying the Improved Singular Spectrum Analysis Method and Environmental Loading Models. Pure Appl. Geophys. 2018, 175, 1823–1840. [Google Scholar] [CrossRef]
- Wu, H.; Li, K.; Shi, W.; Clarke, K.C.; Zhang, J.; Li, H. A wavelet-based hybrid approach to remove the flicker noise and the white noise from GPS coordinate time series. GPS Solut. 2015, 19, 511–523. [Google Scholar] [CrossRef]
- Klos, A.; Bos, M.S.; Fernandes, R.M.S.; Bogusz, J. Noise-Dependent Adaption of the Wiener Filter for the GPS Position Time Series. Math. Geosci. 2019, 51, 53–73. [Google Scholar] [CrossRef] [Green Version]
- Langbein, J. Noise in GPS displacement measurements from Southern California and Southern Nevada. J. Geophys. Res. Solid Earth 2008, 113, 5247. [Google Scholar] [CrossRef]
- Huang, N.E.; Shen, Z.; Long, S.R.; Wu, M.C.; Shih, H.H.; Zheng, Q.; Yen, N.C.; Tung, C.C.; Liu, H.H. The empirical mode decomposition and the Hilbert spectrum for nonlinear and non-stationary time series analysis. Proc. Math. Phys. Eng. Sci. 1998, 454, 903–995. [Google Scholar] [CrossRef]
- Montillet, J.; Tregoning, P.; McClusky, S.; Yu, K. Extracting White Noise Statistics in GPS Coordinate Time Series. IEEE Geosci. Remote Sens. Lett. 2013, 10, 563–567. [Google Scholar] [CrossRef]
- Wu, Z.; Huang, N.E. Ensemble Empirical Mode Decomposition: A Noise-Assisted Data Analysis Method. Adv. Adapt. Data Anal. 2009, 1, 1–41. [Google Scholar] [CrossRef]
- Yeh, J.R.; Shieh, J.S.; Huang, N.E. Complementary Ensemble Empirical Mode Decomposition: A Novel Noise Enhanced Data Analysis Method. Adv. Adapt. Data Anal. 2010, 2, 135–156. [Google Scholar] [CrossRef]
- Peng, W.; Dai, W.; Santerre, R.; Cai, C.; Kuang, C. GNSS Vertical Coordinate Time Series Analysis Using Single-Channel Independent Component Analysis Method. Pure Appl. Geophys. 2017, 174, 723–736. [Google Scholar] [CrossRef]
- Li, Y.; Xu, C.; Yi, L.; Fang, R. A data-driven approach for denoising GNSS position time series. J. Geod. 2018, 92, 905–922. [Google Scholar] [CrossRef]
- Liu, L.; Hsu, H.; Grafarend, E.W. Normal Morlet wavelet transform and its application to the Earth’s polar motion. J. Geophys. Res. Solid Earth 2007, 112, 4895. [Google Scholar] [CrossRef] [Green Version]
- Souza, E.M.d.; Monico, J.F.G. The wavelet method as an alternative for reducing ionospheric effects from single-frequency GPS receivers. J. Geod. 2007, 81, 799–804. [Google Scholar] [CrossRef]
- Martínez, B.; Gilabert, M.A. Vegetation dynamics from NDVI time series analysis using the wavelet transform. Remote Sens. Environ. 2009, 113, 1823–1842. [Google Scholar] [CrossRef]
- Wornell, G.W.; Oppenheim, A.V. Estimation of fractal signals from noisy measurements using wavelets. IEEE Trans. Signal Process. 1992, 40, 611–623. [Google Scholar] [CrossRef]
- Kaczmarek, A.; Kontny, B. Identification of the Noise Model in the Time Series of GNSS Stations Coordinates Using Wavelet Analysis. Remote Sens. 2018, 10, 1611. [Google Scholar] [CrossRef] [Green Version]
- Dragomiretskiy, K.; Zosso, D. Variational Mode Decomposition. IEEE Trans. Signal Process. 2014, 62, 531–544. [Google Scholar] [CrossRef]
- Sivavaraprasad, G.; Padmaja, R.S.; Ratnam, D.V. Mitigation of Ionospheric Scintillation Effects on GNSS Signals Using Variational Mode Decomposition. IEEE Geosci. Remote Sens. Lett. 2017, 14, 389–393. [Google Scholar] [CrossRef]
- Shen, Y.; Zheng, W.; Yin, W.; Xu, A.; Zhu, H. Feature Extraction Algorithm Using a Correlation Coefficient Combined with the VMD and Its Application to the GPS and GRACE. IEEE Access 2021, 9, 17507–17519. [Google Scholar] [CrossRef]
- Xu, H.; Lu, T.; Montillet, J.-P.; He, X. An Improved Adaptive IVMD-WPT-Based Noise Reduction Algorithm on GPS Height Time Series. Sensors 2021, 21, 8295. [Google Scholar] [CrossRef] [PubMed]
- Anusha, S.; Sriram, A.; Palanisamy, T. A Comparative Study on Decomposition of Test Signals Using Variational Mode Decomposition and Wavelets. Int. J. Electr. Eng. Inform. 2016, 8, 886–896. [Google Scholar]
- Bos, M.S.; Fernandes, R.; Williams, S.; Bastos, L. Fast error analysis of continuous GNSS observations with missing data. J. Geod. 2013, 87, 351–360. [Google Scholar] [CrossRef] [Green Version]
- Klos, A.; Bos, M.S.; Bogusz, J. Detecting time-varying seasonal signal in GPS position time series with different noise levels. GPS Solut. 2017, 22, 21. [Google Scholar] [CrossRef] [Green Version]
- Mallat, S.G. Multiresolution approximations and wavelet orthonormal bases of. Trans. Am. Math. Soc. 1989, 315, 69–87. [Google Scholar] [CrossRef]
- Han, M.; Liu, Y.; Xi, J.; Guo, W. Noise Smoothing for Nonlinear Time Series Using Wavelet Soft Threshold. IEEE Signal Process. Lett. 2007, 14, 62–65. [Google Scholar] [CrossRef]
- Wang, Y.; Markert, R.; Xiang, J.; Zheng, W. Research on variational mode decomposition and its application in detecting rub-impact fault of the rotor system. Mech. Syst. Signal Process. 2015, 60–61, 243–251. [Google Scholar] [CrossRef]
- Komaty, A.; Boudraa, A.O.; Augier, B.; Dare-Emzivat, D. EMD-Based Filtering Using Similarity Measure between Probability Density Functions of IMFs. IEEE Trans. Instrum. Meas. 2013, 63, 27–34. [Google Scholar] [CrossRef] [Green Version]
- Liu, Y.; Yang, G.; Li, M.; Yin, H. Variational mode decomposition denoising combined the detrended fluctuation analysis. Signal Process. 2016, 125, 349–364. [Google Scholar] [CrossRef]
- Ji, K.; Shen, Y.; Wang, F. Signal Extraction from GNSS Position Time Series Using Weighted Wavelet Analysis. Remote Sens. 2020, 12, 992. [Google Scholar] [CrossRef] [Green Version]
- Bevis, M.; Brown, A. Trajectory models and reference frames for crustal motion geodesy. J. Geod. 2014, 88, 283–311. [Google Scholar] [CrossRef] [Green Version]
- Dong, D.; Fang, P.; Bock, Y.; Cheng, M.K.; Miyazaki, S. Anatomy of apparent seasonal variations from GPS-derived site position time series. J. Geophys. Res. Solid Earth 2002, 107, ETG9-1–ETG9-16. [Google Scholar] [CrossRef] [Green Version]
- Williams, S.D.P.; Bock, Y.; Fang, P.; Jamason, P.; Nikolaidis, R.M.; Prawirodirdjo, L.; Miller, M.; Johnson, D.J. Error analysis of continuous GPS position time series. J. Geophys. Res. Solid Earth 2004, 109, 2741. [Google Scholar] [CrossRef] [Green Version]
- Teferle, F.N.; Williams, S.D.P.; Kierulf, H.P.; Bingley, R.M.; Plag, H.-P. A continuous GPS coordinate time series analysis strategy for high-accuracy vertical land movements. Phys. Chem. Earth Parts A/B/C 2008, 33, 205–216. [Google Scholar] [CrossRef] [Green Version]
- Williams, S.D.P. CATS: GPS coordinate time series analysis software. GPS Solut. 2008, 12, 147–153. [Google Scholar] [CrossRef]
- ElGharbawi, T.; Tamura, M. Measuring deformations using SAR interferometry and GPS observables with geodetic accuracy: Application to Tokyo, Japan. ISPRS J. Photogramm. Remote Sens. 2014, 88, 156–165. [Google Scholar] [CrossRef] [Green Version]
- Montenbruck, O.; Ramos-Bosch, P. Precision real-time navigation of LEO satellites using global positioning system measurements. GPS Solut. 2008, 12, 187–198. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Group | CEEMD | CEEMD & WD | VMD | CEEMD & WD | WD |
|---|---|---|---|---|---|
| 10–15 mm/year0.25 | 84.11 ± 2.83 | 88.85 ± 1.55 | 68.77 ± 1.58 | 88.90 ± 1.40 | 87.22 ± 1.47 |
| 15–20 mm/year0.25 | 82.98 ± 5.00 | 87.30 ± 1.59 | 69.67 ± 2.31 | 87.13 ± 1.25 | 82.51 ± 2.32 |
| 20–25 mm/year0.25 | 78.97 ± 6.95 | 85.98 ± 3.17 | 69.71 ± 2.96 | 85.77 ± 2.84 | 81.17 ± 4.35 |
| 25–30 mm/year0.25 | 76.71 ± 8.87 | 84.05 ± 5.45 | 68.89 ± 3.08 | 83.89 ± 5.08 | 77.82 ± 7.13 |
| 30–35 mm/year0.25 | 70.12 ± 8.86 | 77.63 ± 5.42 | 64.95 ± 2.13 | 76.60 ± 5.18 | 62.77 ± 10.45 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, B.; Yang, Z.; Tian, Z.; Liang, P. Weakening the Flicker Noise in GPS Vertical Coordinate Time Series Using Hybrid Approaches. Remote Sens. 2023, 15, 1716. https://doi.org/10.3390/rs15061716
Yang B, Yang Z, Tian Z, Liang P. Weakening the Flicker Noise in GPS Vertical Coordinate Time Series Using Hybrid Approaches. Remote Sensing. 2023; 15(6):1716. https://doi.org/10.3390/rs15061716
Chicago/Turabian StyleYang, Bing, Zhiqiang Yang, Zhen Tian, and Pei Liang. 2023. "Weakening the Flicker Noise in GPS Vertical Coordinate Time Series Using Hybrid Approaches" Remote Sensing 15, no. 6: 1716. https://doi.org/10.3390/rs15061716
APA StyleYang, B., Yang, Z., Tian, Z., & Liang, P. (2023). Weakening the Flicker Noise in GPS Vertical Coordinate Time Series Using Hybrid Approaches. Remote Sensing, 15(6), 1716. https://doi.org/10.3390/rs15061716