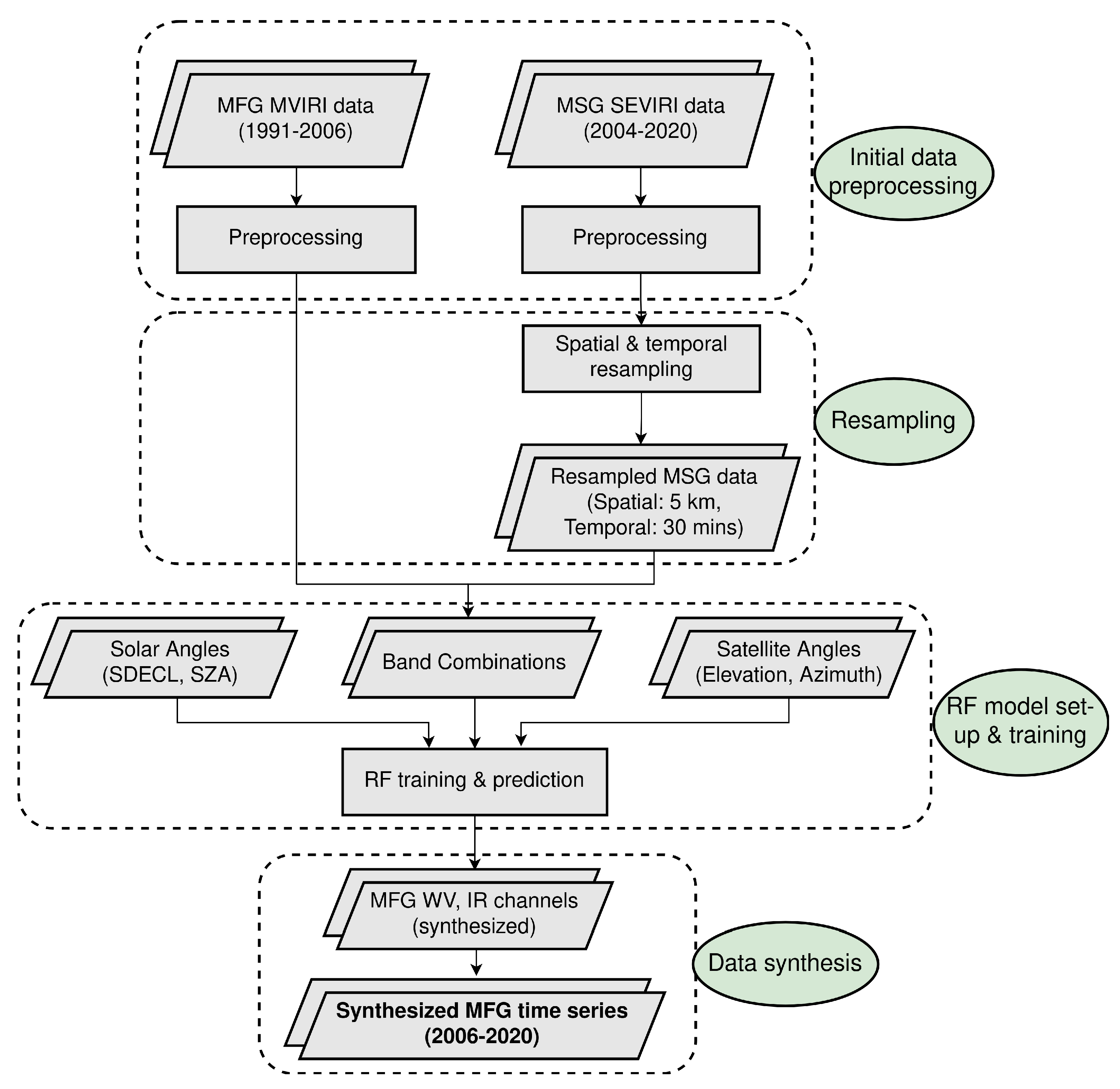
Figure 1.
Flowchart depicting the methodology followed for the inter–calibration of MFG and MSG datasets. (SDECL: Sun Declination, SZA: Solar Zenith Angle, and RF: Random Forest).
Figure 1.
Flowchart depicting the methodology followed for the inter–calibration of MFG and MSG datasets. (SDECL: Sun Declination, SZA: Solar Zenith Angle, and RF: Random Forest).
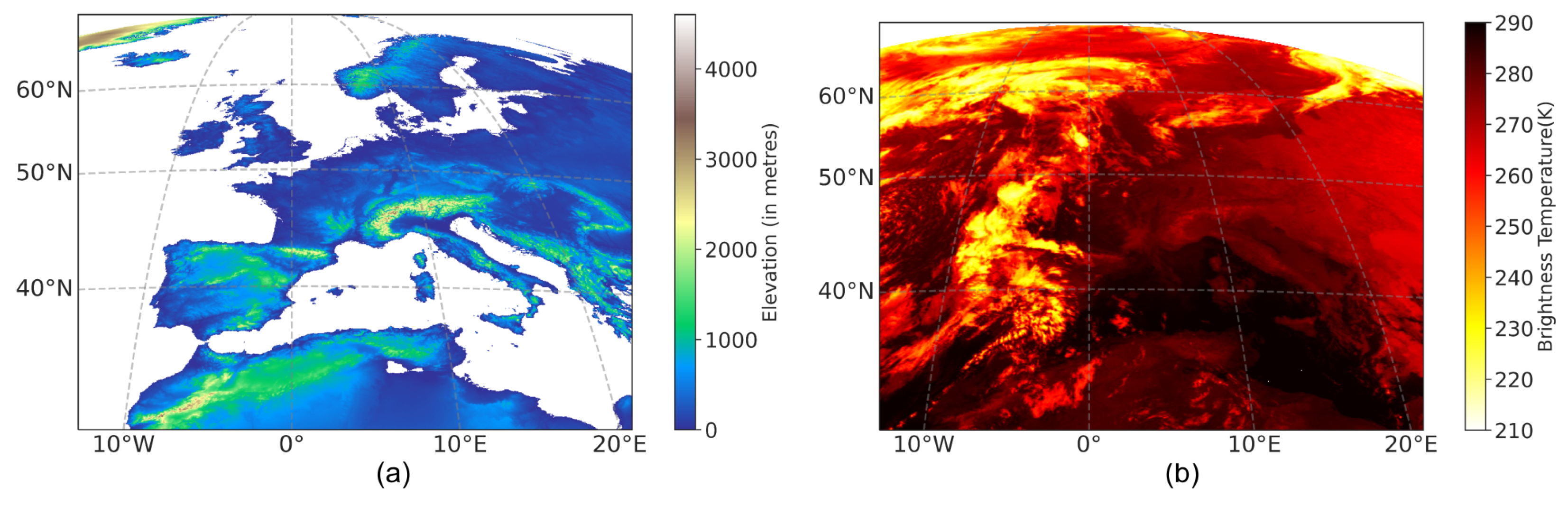
Figure 2.
Region of interest for the inter-calibration of Meteosat datasets (
a) DEM (Source: WorldClim DEM [
28]), and (
b) an exemplary MFG scene IR channel—30 October 2005, 00:00–00:30.
Figure 2.
Region of interest for the inter-calibration of Meteosat datasets (
a) DEM (Source: WorldClim DEM [
28]), and (
b) an exemplary MFG scene IR channel—30 October 2005, 00:00–00:30.
Figure 3.
Timeline of different series of Meteosat satellites. The black rectangular box highlights the overlap period of MFG and MSG (2004–2006).
Figure 3.
Timeline of different series of Meteosat satellites. The black rectangular box highlights the overlap period of MFG and MSG (2004–2006).
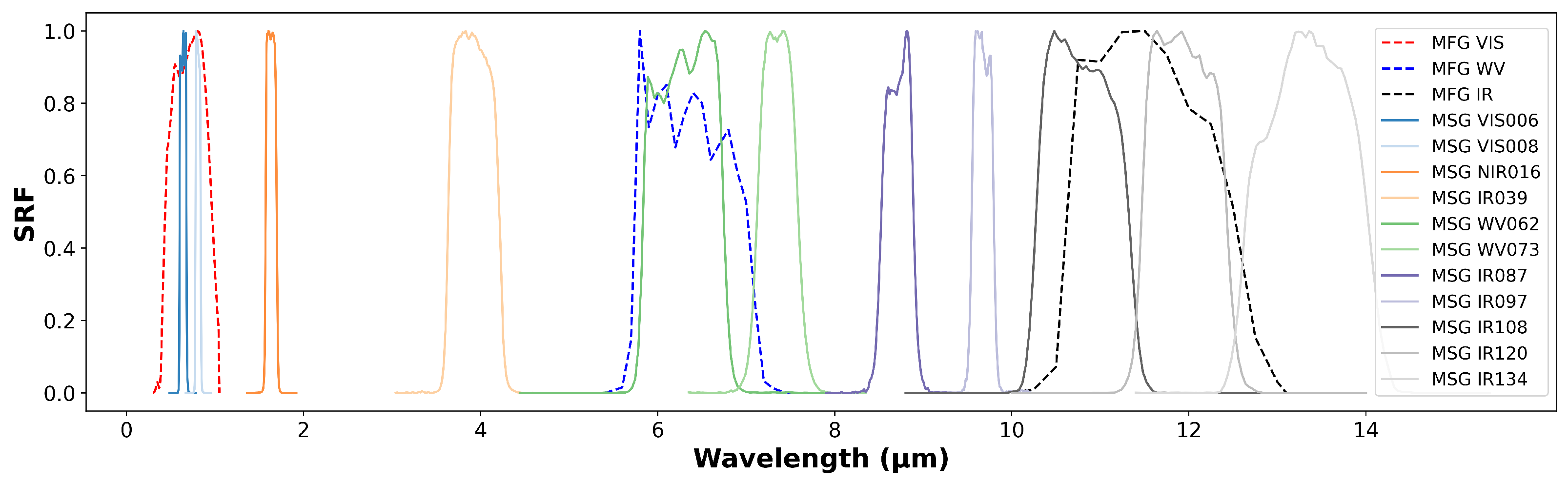
Figure 4.
Spectral response curves for Meteosat-7 (MFG) and Meteosat-8 (MSG).
Figure 4.
Spectral response curves for Meteosat-7 (MFG) and Meteosat-8 (MSG).
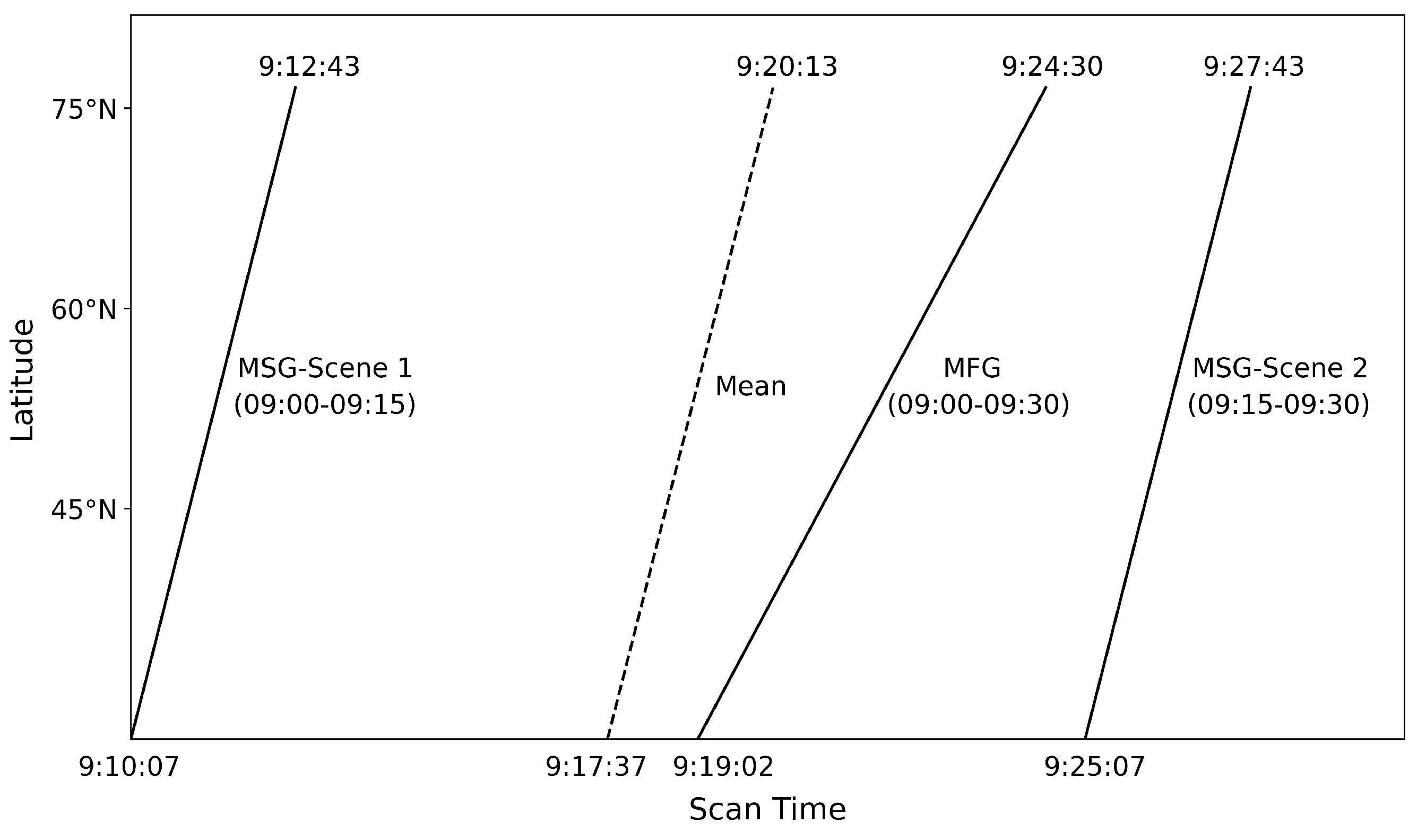
Figure 5.
Plot depicting the scan times of one MFG slot (e.g., 09:00–09:30) and the two enveloping MSG scenes (e.g., 09:00–09:15, 09:15–09:30) along the latitudinal gradient of our study area. The dashed line represents the arithmetic mean of the two MSG scan times which is not fitting the MFG time. To better reproduce the temporal coverage of MFG with the two MSG scenes, we introduced weighted averaging (Equations (5)–(7)).
Figure 5.
Plot depicting the scan times of one MFG slot (e.g., 09:00–09:30) and the two enveloping MSG scenes (e.g., 09:00–09:15, 09:15–09:30) along the latitudinal gradient of our study area. The dashed line represents the arithmetic mean of the two MSG scan times which is not fitting the MFG time. To better reproduce the temporal coverage of MFG with the two MSG scenes, we introduced weighted averaging (Equations (5)–(7)).
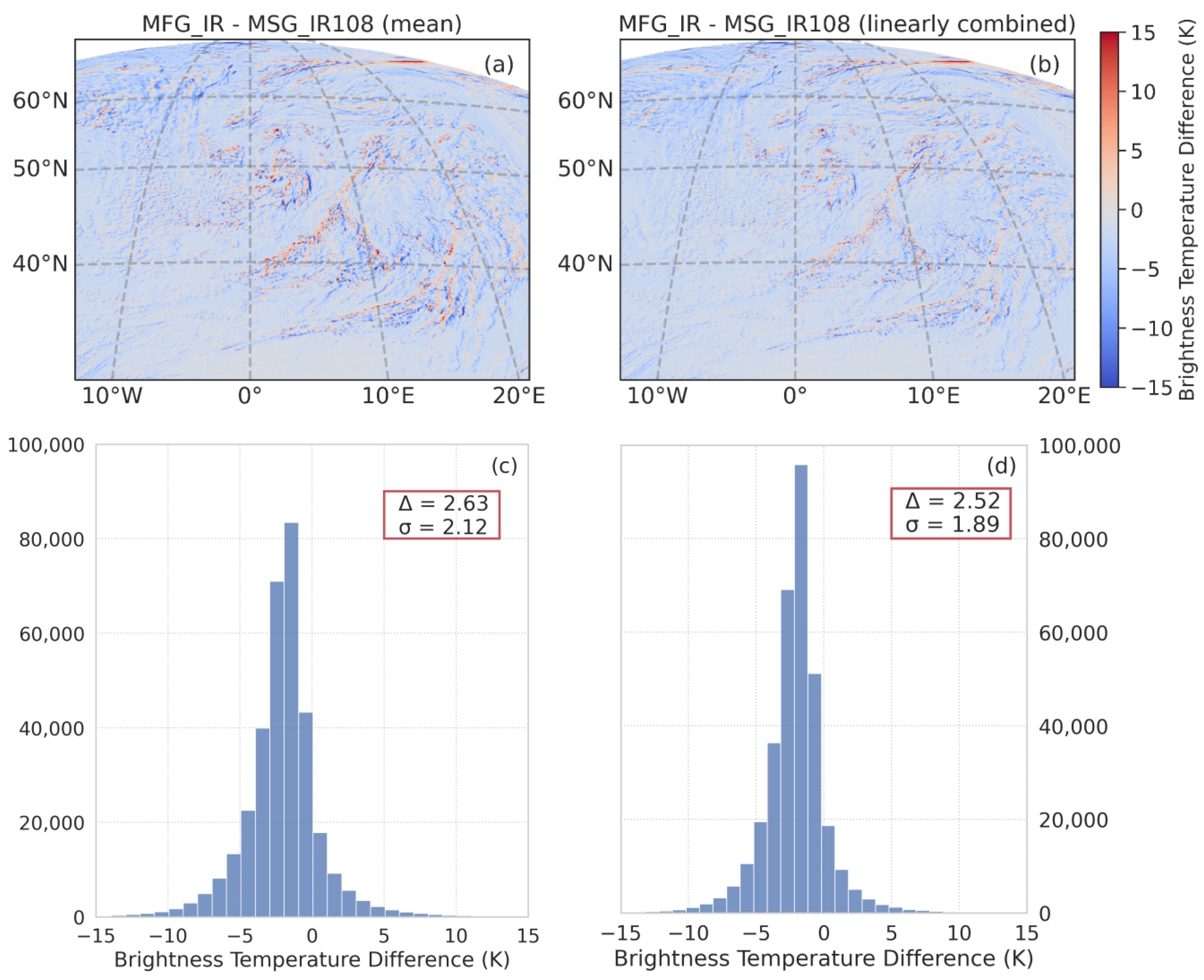
Figure 6.
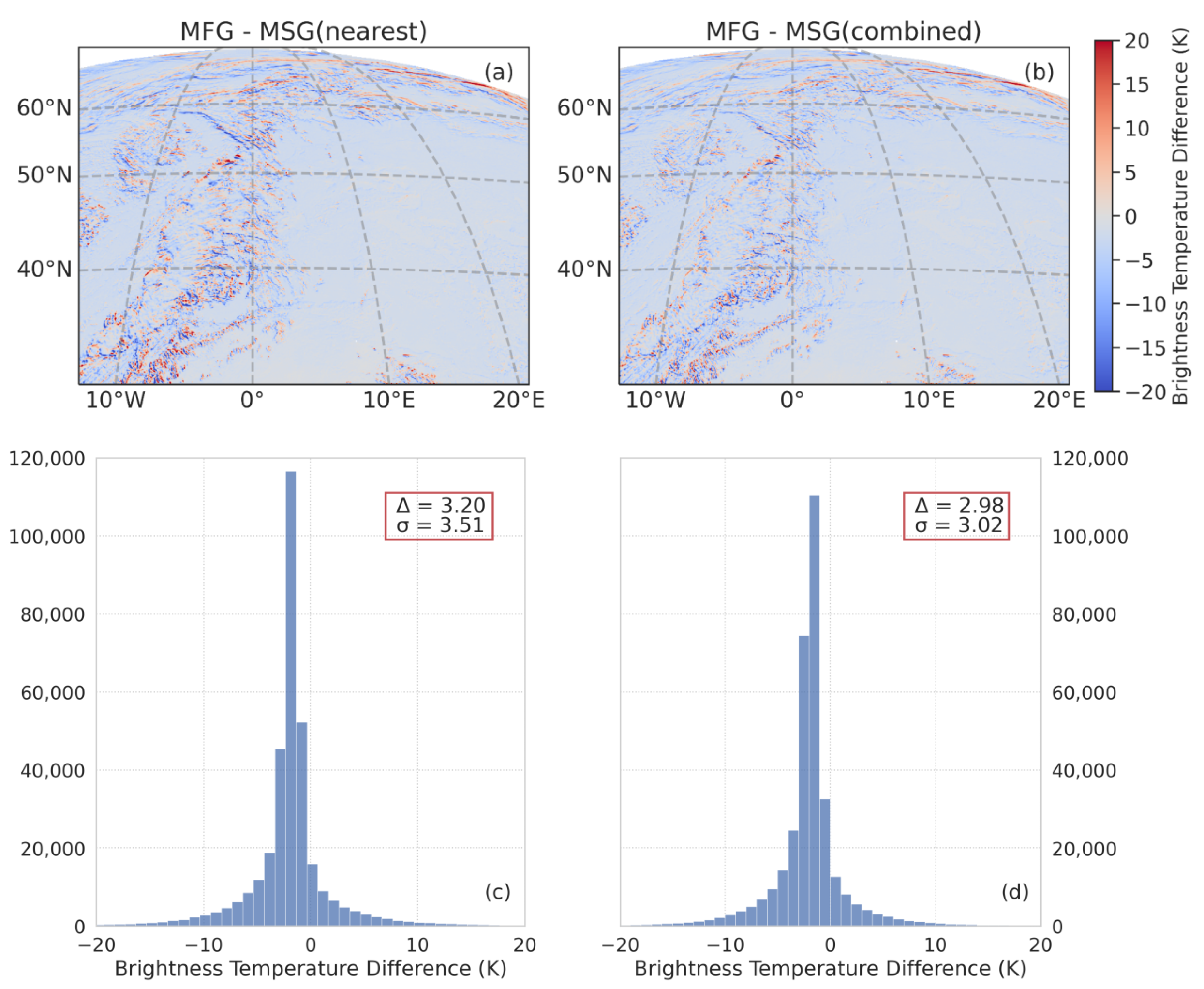
Difference between MFG original (IR channel) and temporally resampled MSG (IR 10.8 µm channel) scene for an example scene—1 January 2006, 09:00–09:30. (a) Difference with respect to the MSG scenes combined using mean BT values. (b) Difference with respect to the MSG scenes linearly combined (method adopted). (c) Histogram for difference shown in plot (a) with mean absolute shift () of 2.63 K and standard deviation () of 2.12 K. (d) Histogram for difference shown in plot (b) with mean absolute shift () of 2.52 K and standard deviation () of 1.89 K.
Figure 6.
Difference between MFG original (IR channel) and temporally resampled MSG (IR 10.8 µm channel) scene for an example scene—1 January 2006, 09:00–09:30. (a) Difference with respect to the MSG scenes combined using mean BT values. (b) Difference with respect to the MSG scenes linearly combined (method adopted). (c) Histogram for difference shown in plot (a) with mean absolute shift () of 2.63 K and standard deviation () of 2.12 K. (d) Histogram for difference shown in plot (b) with mean absolute shift () of 2.52 K and standard deviation () of 1.89 K.
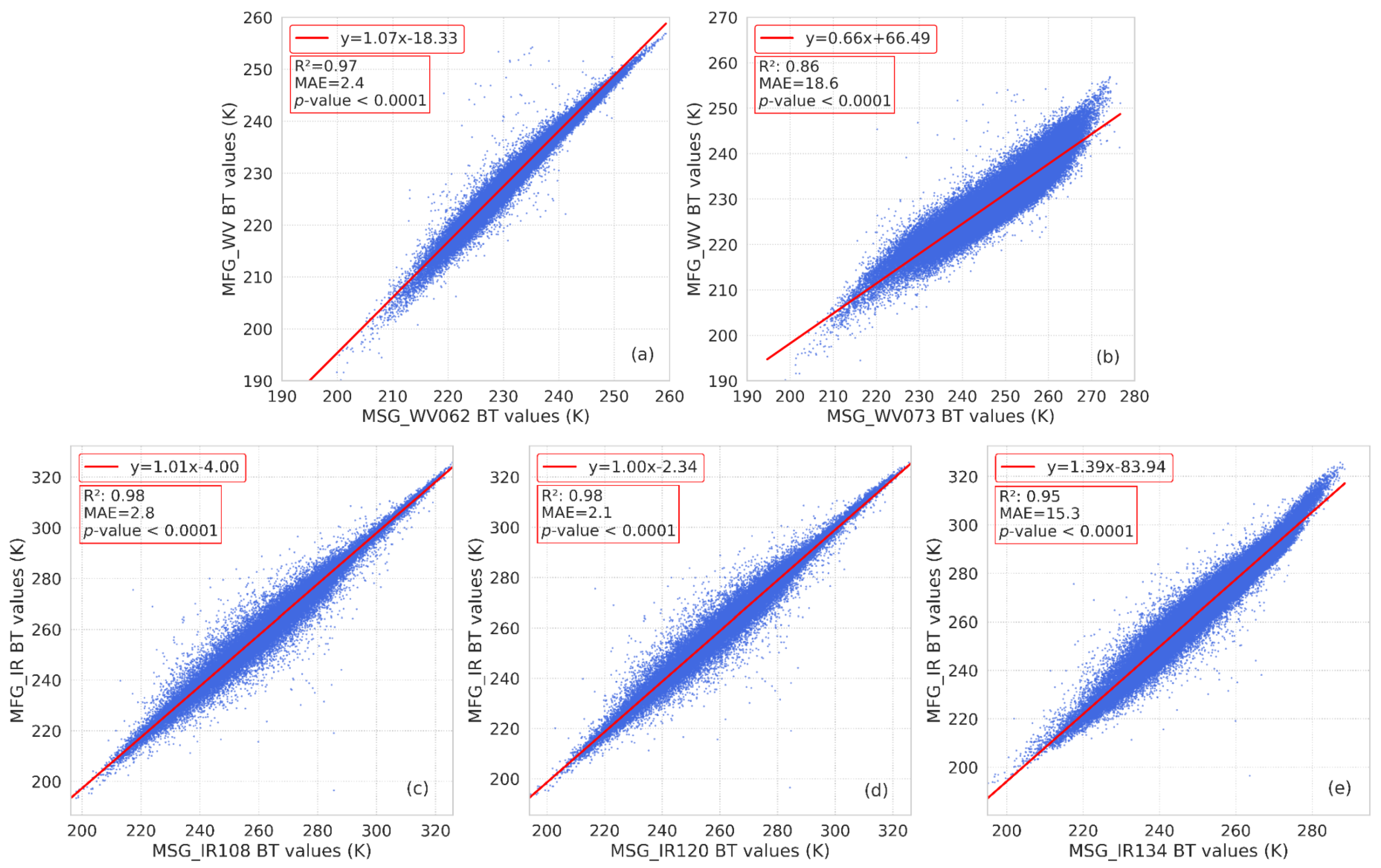
Figure 7.
Scatter plots of MFG-MSG channels BT values (K). (a) MSG WV062 vs. MFG WV, (b) MSG WV073 vs. MFG WV, (c) MSG IR108 vs. MFG IR, (d) MSG IR120 vs. MFG IR, and (e) MSG IR134 vs. MFG IR. The red line in each scatter plot represents the best-fit regression line. These scatter plots were generated based on randomly selecting 100,000 MFG/MSG pixels from the overlap period (2004–2006).
Figure 7.
Scatter plots of MFG-MSG channels BT values (K). (a) MSG WV062 vs. MFG WV, (b) MSG WV073 vs. MFG WV, (c) MSG IR108 vs. MFG IR, (d) MSG IR120 vs. MFG IR, and (e) MSG IR134 vs. MFG IR. The red line in each scatter plot represents the best-fit regression line. These scatter plots were generated based on randomly selecting 100,000 MFG/MSG pixels from the overlap period (2004–2006).
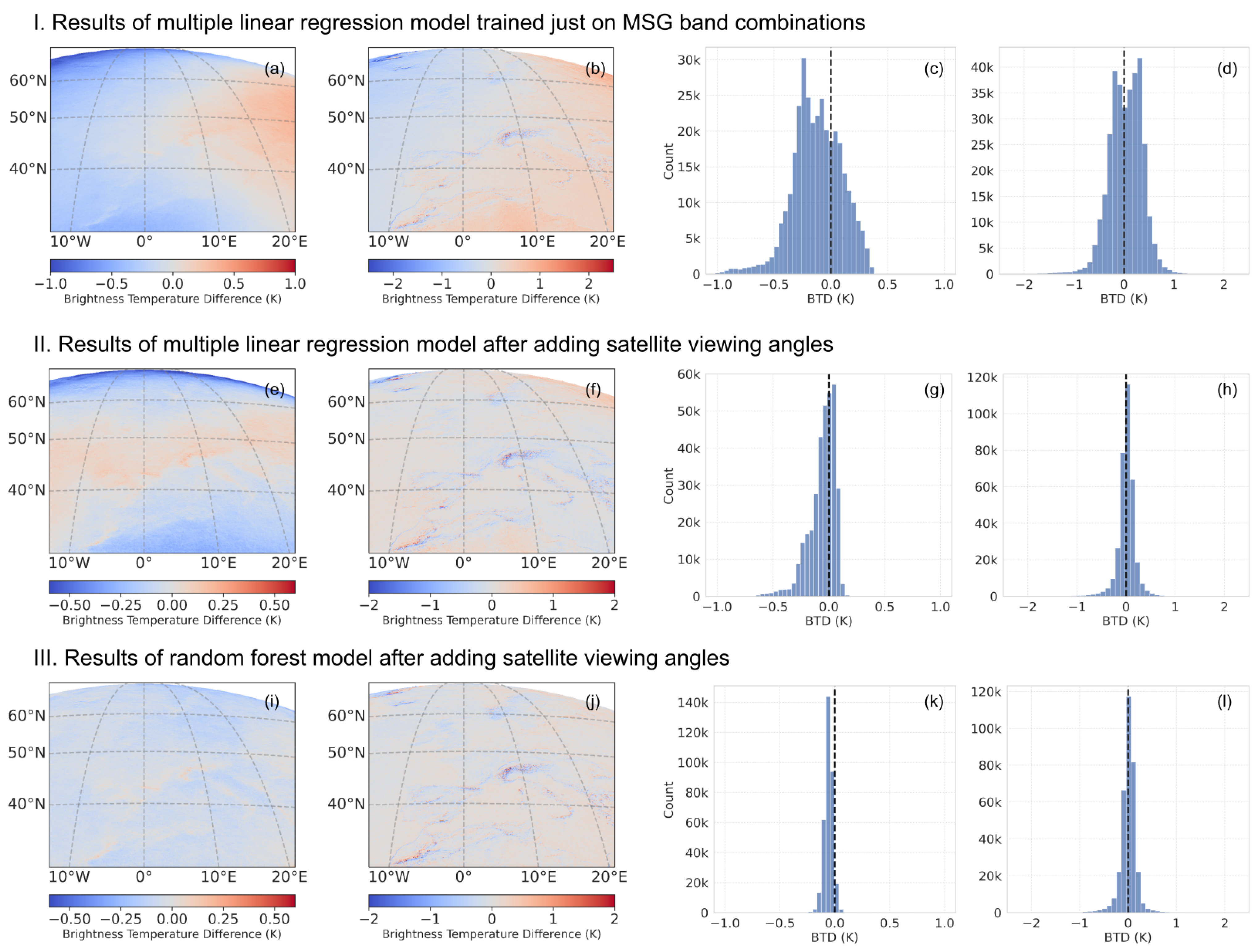
Figure 8.
Mean difference composite plots generated based on the difference between MFG original and synthesized WV/IR channels and the histogram analysis of these composites for three different model settings. (a,e,i) show the mean difference composites for the WV channel and their histogram plots are shown in (c,g,k), respectively. (b,f,j) show the mean difference composites for the IR channel with their histogram plots represented by (d,h,l) respectively. The values represent the brightness temperature differences (K) between the original and synthesized scenes. These composites are generated by randomly selecting 2000 scenes from the overlap period (2004–2006).
Figure 8.
Mean difference composite plots generated based on the difference between MFG original and synthesized WV/IR channels and the histogram analysis of these composites for three different model settings. (a,e,i) show the mean difference composites for the WV channel and their histogram plots are shown in (c,g,k), respectively. (b,f,j) show the mean difference composites for the IR channel with their histogram plots represented by (d,h,l) respectively. The values represent the brightness temperature differences (K) between the original and synthesized scenes. These composites are generated by randomly selecting 2000 scenes from the overlap period (2004–2006).
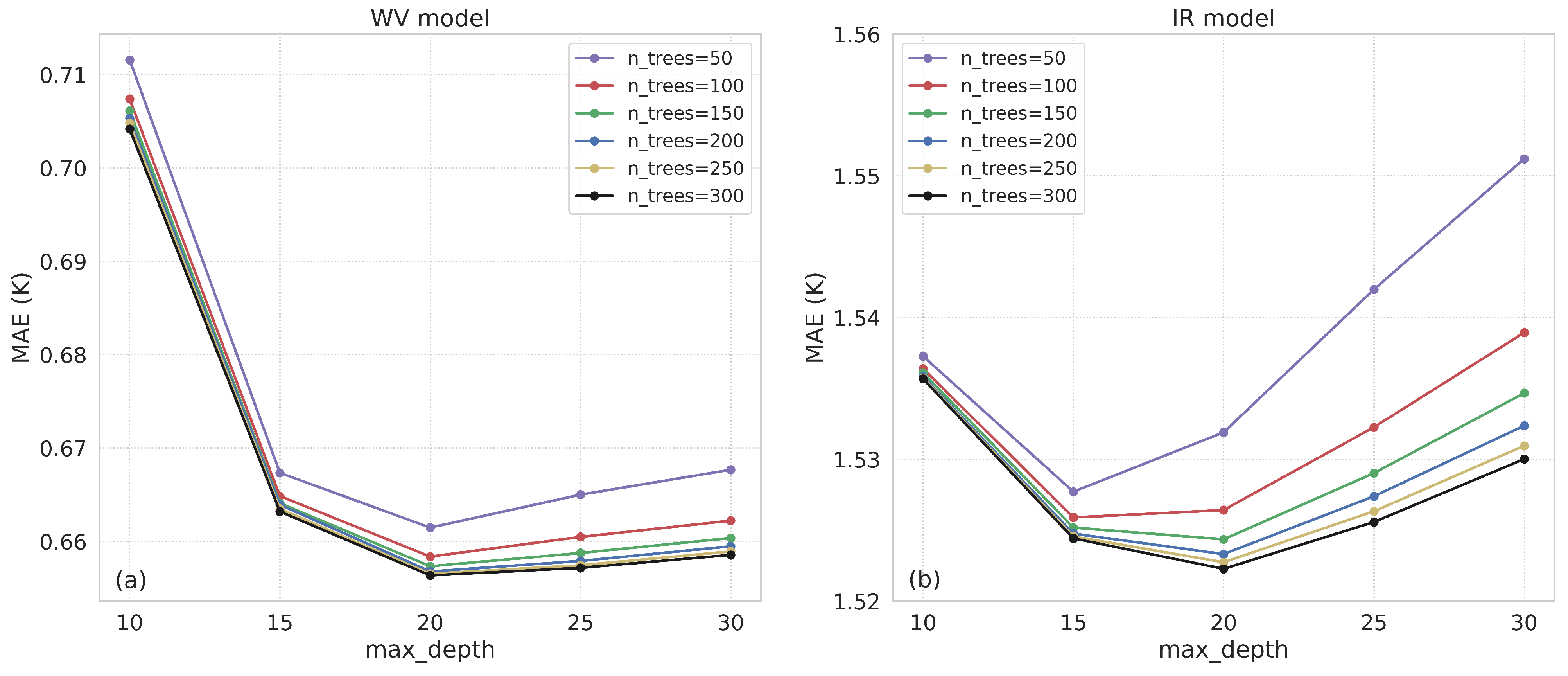
Figure 9.
RF hyperparameters tuning results by visualizing the effect of number of trees (n_trees) and maximum depth of the tree (max_depth) on MAE. Results are shown for (a) the WV model, and (b) the IR model, respectively.
Figure 9.
RF hyperparameters tuning results by visualizing the effect of number of trees (n_trees) and maximum depth of the tree (max_depth) on MAE. Results are shown for (a) the WV model, and (b) the IR model, respectively.
Figure 10.
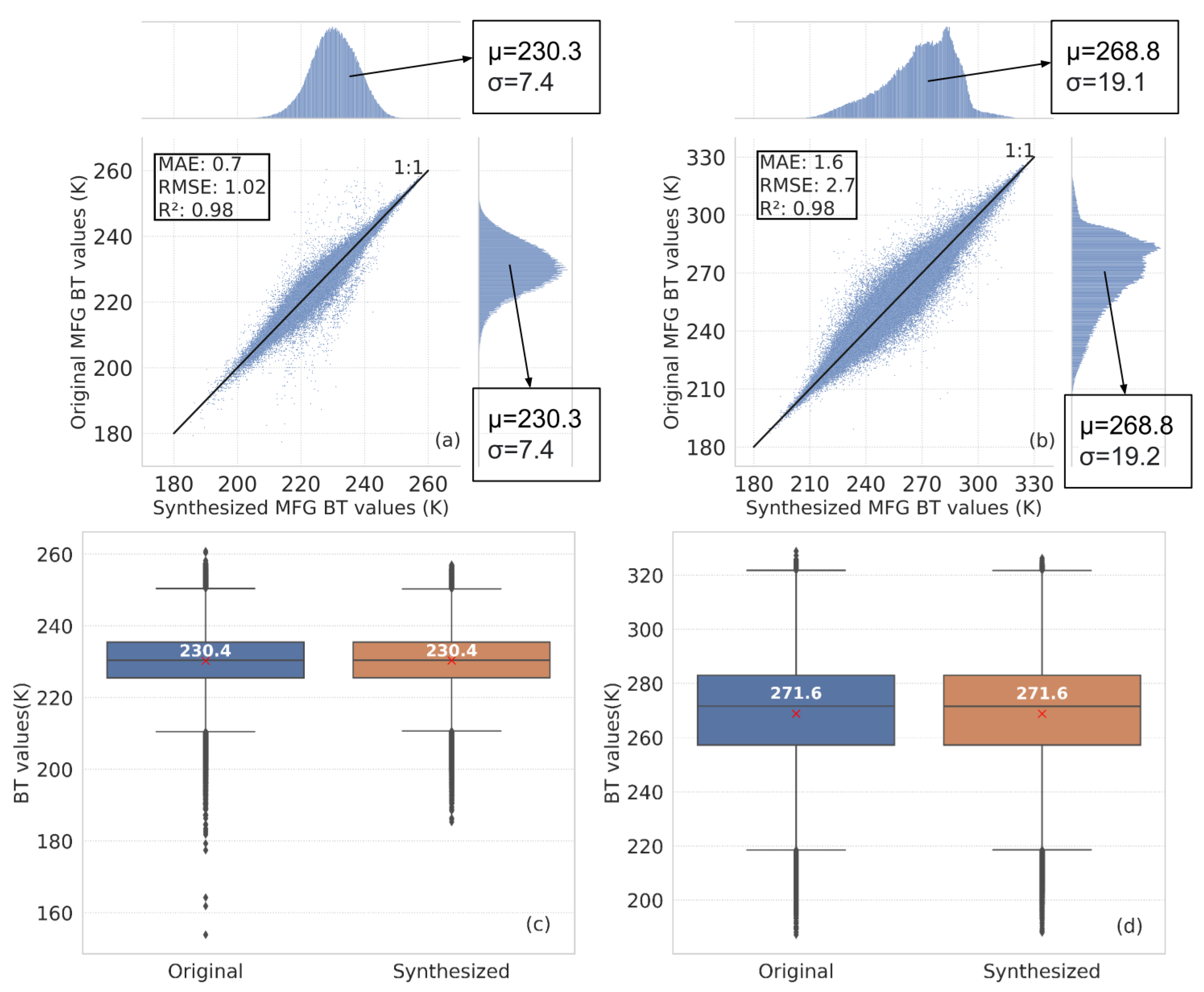
Evaluation of synthesized datasets—(a,b): Scatterplots depicting relationship between the synthesized and original values for WV and IR channel, respectively. The black lines in both the plots are 1:1 reference line. (c,d): Boxplots showing the distribution of the original and synthesized values for WV and IR channel, respectively.
Figure 10.
Evaluation of synthesized datasets—(a,b): Scatterplots depicting relationship between the synthesized and original values for WV and IR channel, respectively. The black lines in both the plots are 1:1 reference line. (c,d): Boxplots showing the distribution of the original and synthesized values for WV and IR channel, respectively.
Figure 11.
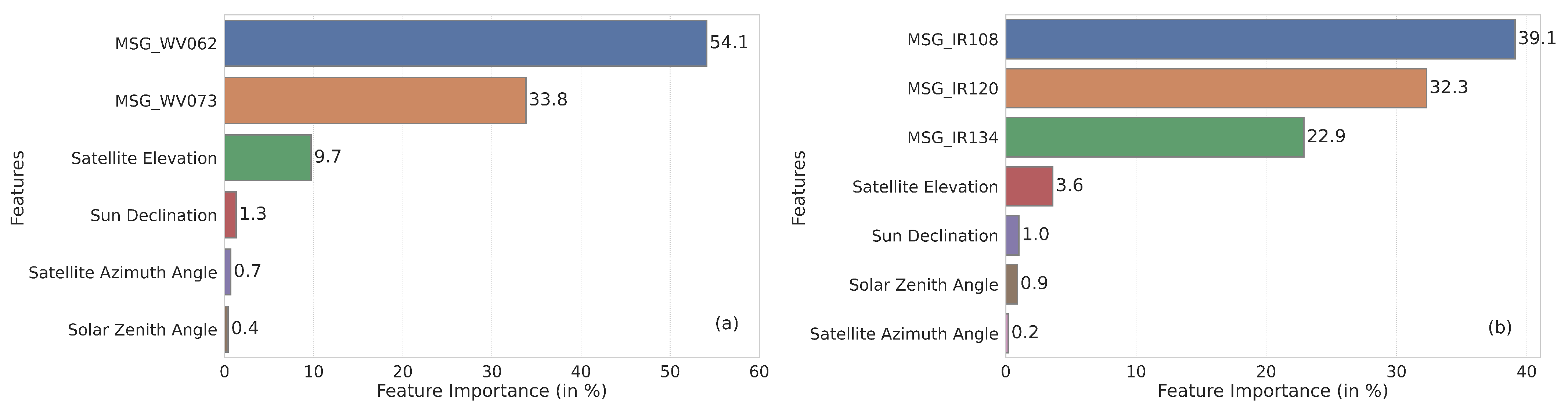
Feature importance for all the input predictors used in (a) WV and (b) IR model. The x-axis shows the feature importance (in %) and the y-axis shows the corresponding name of input variables.
Figure 11.
Feature importance for all the input predictors used in (a) WV and (b) IR model. The x-axis shows the feature importance (in %) and the y-axis shows the corresponding name of input variables.
Figure 12.
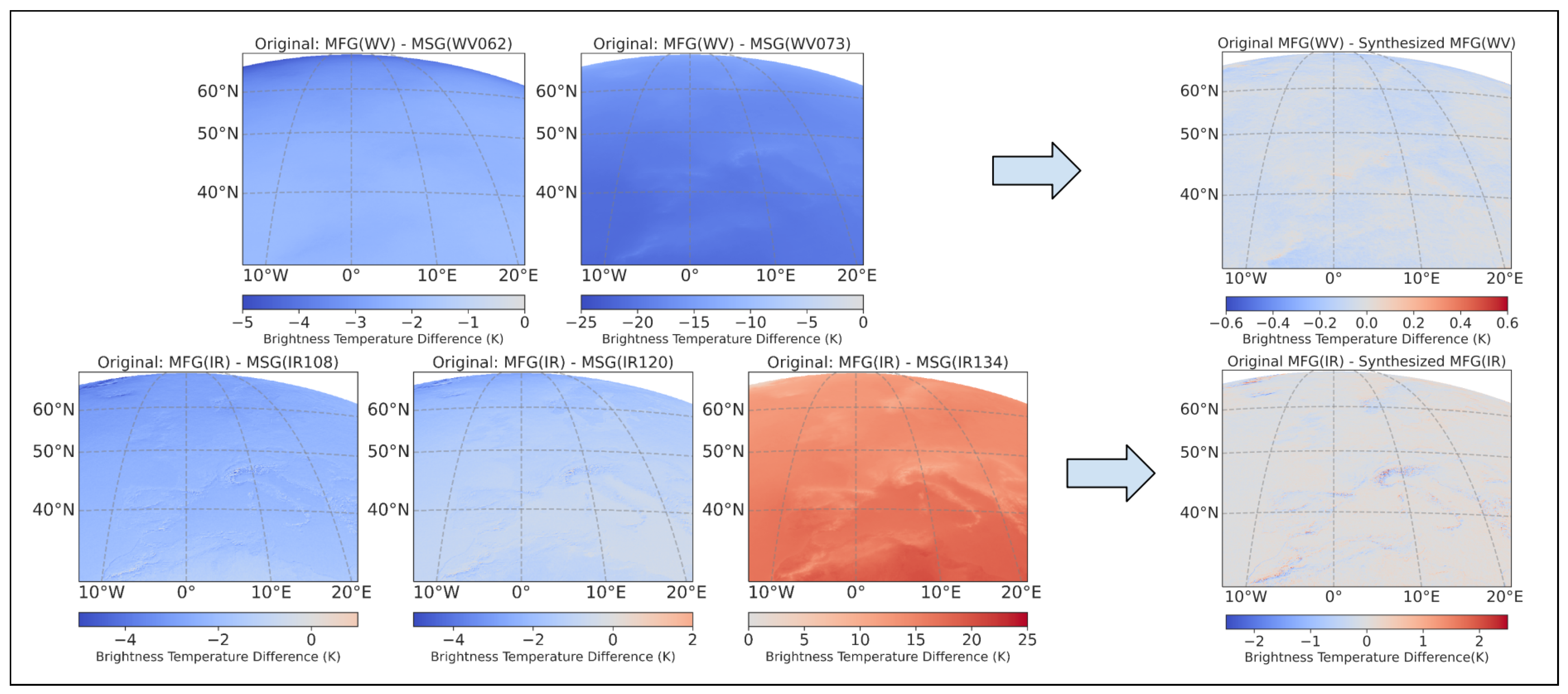
Mean composite differences between MFG and MSG original channels (left) and MFG original and synthesized channels (right). The top row represents the mean composite differences for the WV channels and the bottom row for the IR channels.
Figure 12.
Mean composite differences between MFG and MSG original channels (left) and MFG original and synthesized channels (right). The top row represents the mean composite differences for the WV channels and the bottom row for the IR channels.
Figure 13.
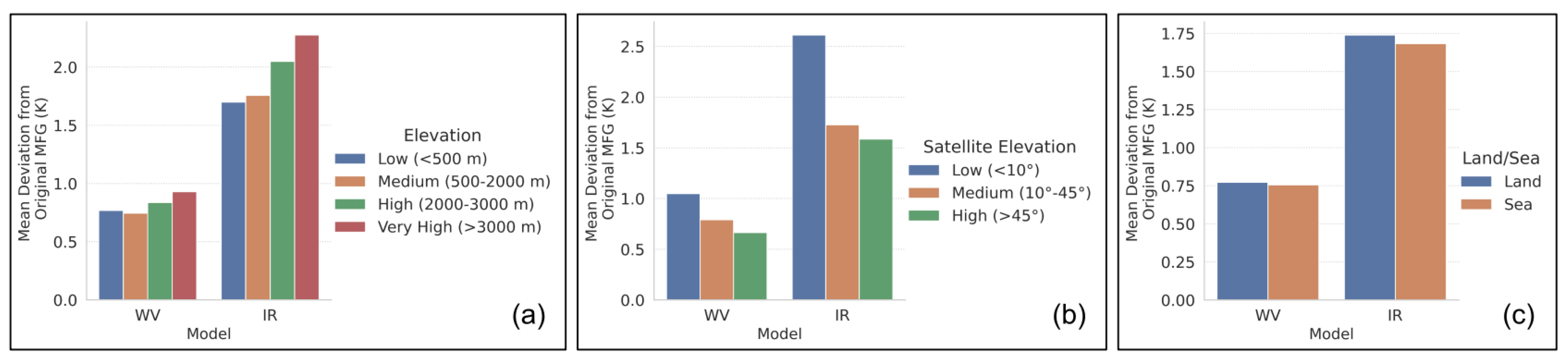
Performance of WV and IR models in different sub-regions classified according to: (a) Elevation, (b) Satellite Elevation (varies from 0° at the disk edges where satellite barely rises above the horizon to 90° at nadir), and (c) Land–Sea. The y-axis represents the mean deviation in synthesized MFG WV and IR channel BT values (K) from the original values.
Figure 13.
Performance of WV and IR models in different sub-regions classified according to: (a) Elevation, (b) Satellite Elevation (varies from 0° at the disk edges where satellite barely rises above the horizon to 90° at nadir), and (c) Land–Sea. The y-axis represents the mean deviation in synthesized MFG WV and IR channel BT values (K) from the original values.
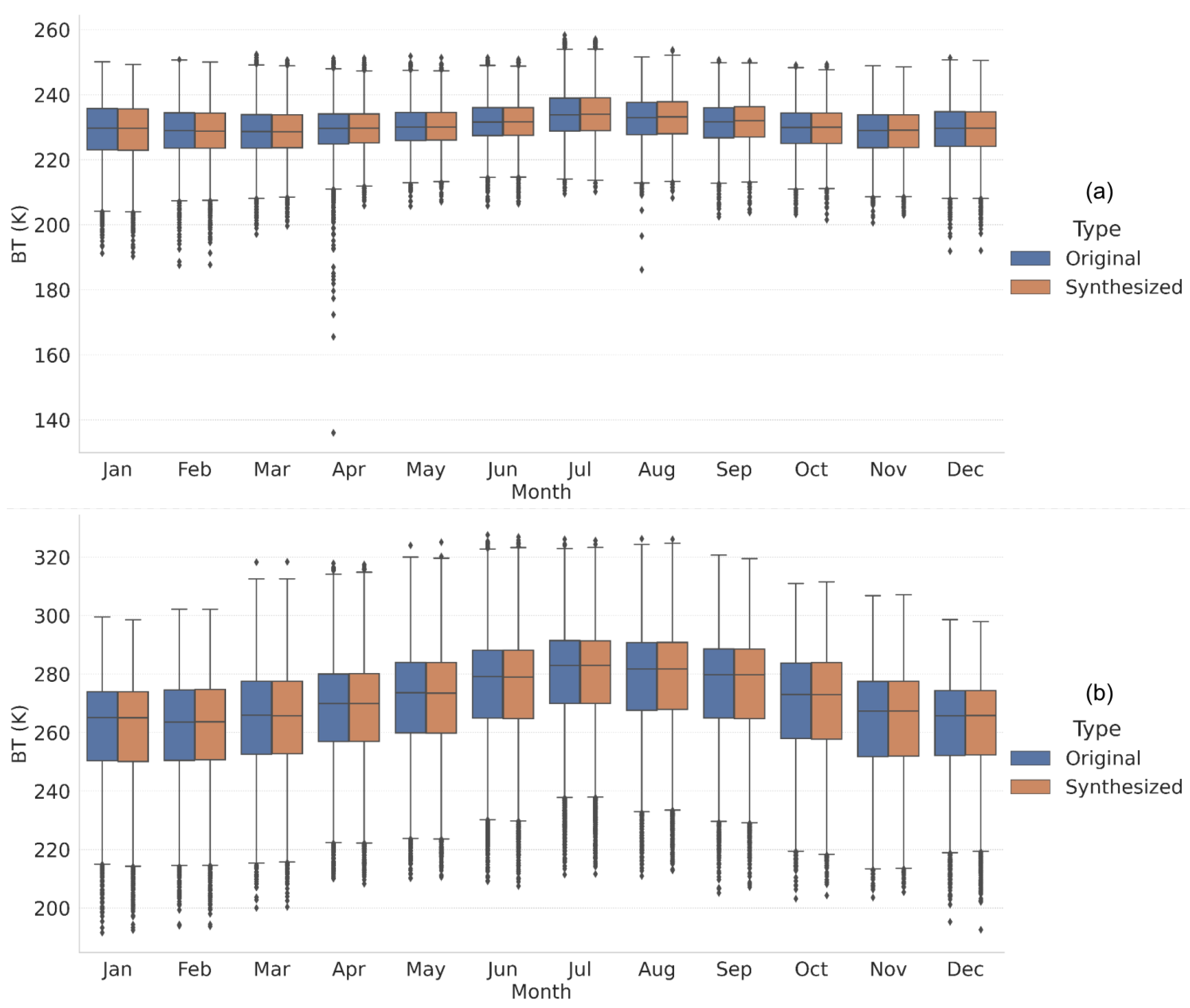
Figure 14.
Monthly comparison of original and synthesized MFG scenes for (a) WV, and (b) IR channel. Box plots of the distribution of original vs. predicted BT values (K) for each month of the year. The boxes represent the 25th, 50th, and 75th percentiles. Whiskers extend 1.5 times the IQR to the most extreme data point (75–25th percentiles).
Figure 14.
Monthly comparison of original and synthesized MFG scenes for (a) WV, and (b) IR channel. Box plots of the distribution of original vs. predicted BT values (K) for each month of the year. The boxes represent the 25th, 50th, and 75th percentiles. Whiskers extend 1.5 times the IQR to the most extreme data point (75–25th percentiles).
Figure 15.
Time series plot (1991–2020) of mean BT values (K) for (a) WV and (b) IR channel. Red dotted lines represent the checkpoints (I to VI) placed whenever there is a change in Meteosat satellites (e.g., Meteosat-4 to -5 and so on) to check for homogeneity of the entire dataset by comparing the mean BT values before and after the change of satellite.
Figure 15.
Time series plot (1991–2020) of mean BT values (K) for (a) WV and (b) IR channel. Red dotted lines represent the checkpoints (I to VI) placed whenever there is a change in Meteosat satellites (e.g., Meteosat-4 to -5 and so on) to check for homogeneity of the entire dataset by comparing the mean BT values before and after the change of satellite.
Table 1.
Percentile values of the histogram analysis for the three different model settings to train the WV and IR model shown in
Figure 8. I, II and III represent the cases for different model settings as described in
Figure 8. p5, p50 and p95 represent the 5th, 50th, and 95th percentile of data distribution in the histogram analysis for each case. The values are mean BT shift (K) between the original and synthesized MFG channels.
Table 1.
Percentile values of the histogram analysis for the three different model settings to train the WV and IR model shown in
Figure 8. I, II and III represent the cases for different model settings as described in
Figure 8. p5, p50 and p95 represent the 5th, 50th, and 95th percentile of data distribution in the histogram analysis for each case. The values are mean BT shift (K) between the original and synthesized MFG channels.
| | WV Channel | IR Channel |
|---|
| | p5 | p50 | p95 | p5 | p50 | p95 |
|---|
| I | −0.5 | −0.1 | 0.2 | −0.5 | 0.0 | 0.5 |
| II | −0.3 | −0.0 | 0.1 | −0.3 | 0.0 | 0.3 |
| III | −0.1 | −0.1 | 0.0 | −0.2 | 0.0 | 0.2 |
Table 2.
Overview of RF predictor variables (WV and IR models).
Table 2.
Overview of RF predictor variables (WV and IR models).
| | MSG Channels | Satellite Angles | Solar Angles |
|---|
| WV Model | MSG WV062 (6.2 µm) | Azimuth Angle | Sun Declination |
| MSG WV073 (7.3 µm) | Satellite Elevation | Zenith Angle |
| IR Model | MSG IR108 (10.8 µm) | Azimuth Angle | Sun Declination |
| MSG IR120 (12.0 µm) | Satellite Elevation | Zenith Angle |
| MSG IR134 (13.4 µm) | | |
Table 3.
Performance metrics of RF models (WV and IR models).
Table 3.
Performance metrics of RF models (WV and IR models).
| | MAE | RMSE | OOB-R² |
|---|
| WV Model | 0.7 | 1.0 | 0.98 |
| IR Model | 1.6 | 2.7 | 0.98 |
Table 4.
Description of the checkpoints placed in the time series plots (in
Figure 15) to check the homogeneity of the long-term datasets. The black dashed line after checkpoint IV marks the separation between MFG original and synthesized datasets.
Table 4.
Description of the checkpoints placed in the time series plots (in
Figure 15) to check the homogeneity of the long-term datasets. The black dashed line after checkpoint IV marks the separation between MFG original and synthesized datasets.
| Checkpoint | Year | Description |
|---|
| I | 1994 | Switch from Meteosat-4 to 5 |
| II | 1997 | Switch from Meteosat-5 to 6 |
| III | 1998 | Switch from Meteosat-6 to 7 |
| IV | 2006 | End of Meteosat-7 and the overlap period of |
| | | Meteosat-7 (MFG) and Meteosat-8 (MSG) |
| V | 2013 | Switch from Meteosat-9 to 10 |
| VI | 2018 | Switch from Meteosat-10 to 11 |
Table 5.
WV channel mean BT values (K) before and after the checkpoints.
Table 5.
WV channel mean BT values (K) before and after the checkpoints.
| Check- | WV (0000 h) | WV (0600 h) | WV (1200 h) | WV (1800 h) |
|---|
| Point | Before | After | Before | After | Before | After | Before | After |
|---|
| I | 232.7 | 234.1 | 232.1 | 233.3 | 232.1 | 233.2 | 232 | 233.1 |
| II | 234 | 233.4 | 233.1 | 233.2 | 233 | 233 | 232.9 | 232.9 |
| III | 233.3 | 231.4 | 233.3 | 230.9 | 233.1 | 231.1 | 233 | 230.9 |
| IV | 230.8 | 230.6 | 230.1 | 230.3 | 230 | 230.5 | 230 | 230.3 |
| V | 230.4 | 230.3 | 230.3 | 230.1 | 230.2 | 230.3 | 230.2 | 230 |
| VI | 230.6 | 230.6 | 230.2 | 230.4 | 230.4 | 230.5 | 230.3 | 230.3 |
Table 6.
IR channel mean BT values (K) before and after the checkpoints.
Table 6.
IR channel mean BT values (K) before and after the checkpoints.
| Check- | IR (0000 h) | IR (0600 h) | IR (1200 h) | IR (1800 h) |
|---|
| Point | Before | After | Before | After | Before | After | Before | After |
|---|
| I | 267.9 | 269.2 | 267.7 | 269.6 | 271.7 | 273.4 | 268.1 | 270 |
| II | 268.7 | 267 | 268.3 | 268.5 | 272.2 | 272.1 | 268.7 | 268.4 |
| III | 268.1 | 268 | 268.9 | 268.4 | 272.7 | 272.9 | 268.9 | 269.1 |
| IV | 267.3 | 267.4 | 266.8 | 267.4 | 270.8 | 271.4 | 267.1 | 267.9 |
| V | 266.9 | 266.3 | 267.5 | 266.9 | 271 | 270.7 | 267.8 | 266.9 |
| VI | 267.5 | 266.8 | 267.4 | 267.6 | 271.7 | 271.5 | 268.1 | 267.7 |




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}