
Rapid Estimation of Undifferenced Multi-GNSS Real-Time Satellite Clock Offset Using Partial Observations

 ,
,  ,
, 
Abstract
:1. Introduction
2. Methods
2.1. Multi-GNSS Satellite Clock Offset Estimation Model
2.2. Satellite Clock Offset Estimation Using Partial Observations
3. Results
3.1. Experiment Setup
3.2. Computation Efficiency
3.3. Clock Offset Accuracy
3.4. PPP Validation
4. Discussions
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Zumberge, J.F.; Heflin, M.B.; Jefferson, D.C.; Watkins, M.M.; Webb, F.H. Precise point positioning for the efficient and robust analysis of GPS data from large networks. J. Geophys. Res. 1997, 102, 5005–5017. [Google Scholar] [CrossRef] [Green Version]
- Guo, J.; Li, X.; Li, Z.; Hu, L.; Yang, G.; Zhao, C.; Fairbairn, D.; Watson, D.; Ge, M. Multi-GNSS precise point positioning for precision agriculture. Precis. Agric. 2018, 19, 895–911. [Google Scholar] [CrossRef] [Green Version]
- Ge, Y.; Dai, P.; Qin, W.; Yang, X.; Zhou, F.; Wang, S.; Zhao, X. Performance of multi-GNSS precise point positioning time and frequency transfer with clock modeling. Remote Sens. 2019, 11, 347. [Google Scholar] [CrossRef] [Green Version]
- Lu, C.; Li, X.; Nilsson, T.; Ning, T.; Heinkelmann, R.; Ge, M.; Glaser, S.; Schuh, H. Real-time retrieval of precipitable water vapor from GPS and BeiDou observations. J. Geod. 2015, 89, 843–856. [Google Scholar] [CrossRef]
- Duan, B.; Hugentobler, U.; Chen, J.; Selmke, I.; Wang, J. Prediction versus real-time orbit determination for GNSS satellites. GPS Solut. 2019, 23, 39. [Google Scholar] [CrossRef]
- Huang, G.; Cui, B.; Zhang, Q.; Fu, W.; Li, P. An improved predicted model for BDS ultra-rapid satellite clock offsets. Remote Sens. 2018, 10, 60. [Google Scholar] [CrossRef] [Green Version]
- Caissy, M.; Agrotis, L. Real-time working group and real-time pilot project. In International GNSS Service; Technical Report 2011; Astronomical Institute, University of Bern: Bern, Switzerland, 2011; pp. 183–190. [Google Scholar]
- Hadas, T.; Bosy, J. IGS RTS precise orbits and clocks verification and quality degradation over time. GPS Solut. 2015, 19, 93–105. [Google Scholar] [CrossRef] [Green Version]
- Li, B.; Ge, H.; Bu, Y.; Zheng, Y.; Yuan, L. Comprehensive assessment of real-time precise products from IGS analysis centers. Satell. Navig. 2022, 3, 12. [Google Scholar] [CrossRef]
- Fu, W.; Yang, Y.; Zhang, Q.; Huang, G. Real-time estimation of BDS/GPS high-rate satellite clock offsets using sequential least squares. Adv. Space Res. 2018, 62, 477–487. [Google Scholar] [CrossRef]
- Jiao, G.; Song, S. High-rate one-hourly updated ultra-rapid multi-GNSS satellite clock offsets estimation and its application in real-time precise point positioning. Remote Sens. 2022, 14, 1257. [Google Scholar] [CrossRef]
- Tao, J. Research on GNSS Real-time Precise Satellite Clock Fast Estimation. Master Thesis, Wuhan University, Wuhan, China, 2019. [Google Scholar]
- Cao, X.; Kuang, K.; Ge, Y.; Shen, F.; Zhang, S.; Li, J. An efficient method for undifferenced BDS-2/BDS-3 high-rate clock estimation. GPS Solut. 2022, 26, 66. [Google Scholar] [CrossRef]
- Zuo, X.; Jiang, X.; Li, P.; Wang, J.; Ge, M.; Schuh, H. A square root information filter for multi-GNSS real-time precise clock estimation. Satell. Navig. 2021, 2, 28. [Google Scholar] [CrossRef]
- Gong, X.; Gu, S.; Lou, Y.; Zheng, F.; Ge, M.; Liu, J. An efficient solution of real-time data processing for multi-GNSS network. J. Geod. 2018, 92, 797–809. [Google Scholar] [CrossRef]
- Liu, T.; Zhang, B.; Yuan, Y.; Zha, J.; Zhao, C. An efficient undifferenced method for estimating multi-GNSS high-rate clock corrections with data streams in real time. J. Geod. 2019, 93, 1435–1456. [Google Scholar] [CrossRef]
- Dai, Z.; Dai, X.; Zhao, Q.; Bao, Z.; Li, C. Multi-GNSS real-time clock estimation using the dual-thread parallel method. Adv. Space Res. 2018, 62, 2518–2528. [Google Scholar] [CrossRef]
- Chen, H.; Jiang, W.; Ge, M.; Wickert, J.; Schuh, H. Efficient high-rate satellite clock estimation for PPP ambiguity resolution using carrier-ranges. Sensors 2014, 14, 22300–22312. [Google Scholar] [CrossRef] [Green Version]
- Li, X.; Xiong, Y.; Yuan, Y.; Wu, J.; Li, X.; Zhang, K.; Huang, J. Real-time estimation of multi-GNSS integer recovery clock with undifferenced ambiguity resolution. J. Geod. 2019, 93, 2515–2528. [Google Scholar] [CrossRef]
- Fu, W.; Huang, G.; Zhang, Q.; Gu, S.; Ge, M.; Schuh, H. Multi-GNSS real-time clock estimation using sequential least square adjustment with online quality control. J. Geod. 2019, 93, 963–976. [Google Scholar] [CrossRef]
- Xie, W.; Huang, G.; Fu, W.; Shu, B.; Cui, B.; Li, M.; Yue, F. A quality control method based on improved IQR for estimating multi-GNSS real-time satellite clock offset. Measurement 2022, 201, 111695. [Google Scholar] [CrossRef]
- Kouba, J.; Héroux, P. Precise point positioning using IGS orbit and clock products. GPS Solut. 2001, 5, 12–28. [Google Scholar] [CrossRef]
- Wang, J.; Zhang, Q.; Huang, G. Estimation of fractional cycle bias for GPS/BDS-2/galileo based on international GNSS monitoring and assessment system observations using the uncombined PPP model. Sate. Navig. 2021, 9, 2. [Google Scholar] [CrossRef]
- Cui, B.; Li, P.; Wang, J.; Ge, M.; Schuh, H. Calibrating receiver-type-dependent wide-lane uncalibrated phase delay biases for PPP integer ambiguity resolution. J. Geod. 2021, 95, 82. [Google Scholar] [CrossRef]
- Wang, J.; Huang, G.; Zhang, Q.; Gao, Y.; Gao, Y.; Luo, Y. GPS/BDS-2/galileo precise point positioning ambiguity resolution based on the uncombined model. Remote Sens. 2020, 12, 1853. [Google Scholar] [CrossRef]
- Xie, W.; Huang, G.; Fu, W.; Li, P.; Cui, B. An efficient clock offset datum switching compensation method for BDS real-time satellite clock offset estimation. Adv. Space Res. 2021, 68, 1802–1813. [Google Scholar] [CrossRef]
- Dach, R.; Lutz, S.; Walser, P.; Fridez, P. Bernese GNSS Software Version 5.2; Astronomical Institute, University of Bern: Berne, Switzerland, 2015. [Google Scholar]
- Chen, L.; Li, M.; Zhao, Y.; Zheng, F.; Shi, C. Multi-GNSS real-time precise clock estimation considering the correction of inter-satellite code biases. GPS Solut. 2021, 25, 32. [Google Scholar] [CrossRef]
- Montenbruck, O.; Steigenberger, P.; Prange, L.; Deng, Z.; Zhao, Q.; Perosanz, F.; Romero, I.; Noll, C.; Stürze, A.; Weber, G.; et al. The multi-GNSS experiment (MGEX) of the international GNSS Service (IGS)—Achievements, prospects and challenges. Adv. Space Res. 2017, 59, 1671–1697. [Google Scholar] [CrossRef]
- Prange, L.; Orliac, E.; Dach, R.; Arnold, D.; Beutler, G.; Schaer, S.; Jäggi, A. CODE’s five-system orbit and clock solution-the challenges of multi-GNSS data analysis. J. Geod. 2017, 91, 345–360. [Google Scholar] [CrossRef] [Green Version]
- Kouba, J. Relativity effects of galileo passive hydrogen maser satellite clocks. GPS Solut. 2019, 23, 117. [Google Scholar] [CrossRef]
- Wu, J.T.; Wu, S.C.; Hajj, G.A.; Bertiger, W.I.; Lichten, S.M. Effects of antenna orientation on GPS carrier phase. In Proceedings of the Astrodynamics 1991, San Diego, CA, USA, 19–22 August 1991; pp. 1647–1660. [Google Scholar]
- Wang, N.; Yuan, Y.; Li, Z.; Montenbruck, O.; Tan, B. Determination of differential code biases with multi-GNSS observations. J. Geod. 2016, 90, 209–228. [Google Scholar] [CrossRef]
- Petit, G.; Luzum, B. IERS Conventions (2010); IERS Technical Note 36; Verlagdes Bundesamts für Kartographie und Geodsie: Frankfurt, Germany, 2010. [Google Scholar]
- Saastamoinen, J. Contributions to the theory of atmospheric refraction—Part II. Refraction corrections in satellite geodesy. Bull Géod. 1973, 47, 13–34. [Google Scholar] [CrossRef]
- Boehm, J.; Niell, A.; Tregoning, P.; Schuh, H. Global mapping function (GMF): A new empirical mapping function based on numerical weather model data. Geophys. Res. Lett. 2006, 33, L07304. [Google Scholar] [CrossRef] [Green Version]
- Xie, W.; Huang, G.; Wang, L.; Li, P.; Cui, B.; Wang, H.; Cao, Y. Long-term performance detection and evaluation of GLONASS onboard satellite clocks. Measurement 2021, 175, 109091. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Items | Strategies |
|---|---|
| Observations | GPS: L1/L2; Galileo: E1/E5a; BDS-3: B1I/B3I; GLONASS: G1/G2 |
| Weight | E ≤ 30°, P = 2sinE; E > 30°, P = 1; |
| Satellite orbit/ERP | Center for Orbit Determination in European (CODE) [30] |
| Relativistic effect | Corrected [31] |
| Wind-up | Corrected [32] |
| Satellite DCB | CAS [33] |
| Satellite PCO/PCV | igs14.atx |
| Station coordinates | Fixed to IGS weekly solutions |
| Station displacement | Solid tide, ocean tide, pole tide: IERS Convention 2010 [34] |
| Receiver PCO/PCV | igs14.atx |
| Estimator | Sequential least square adjustment [20] |
| Satellite and receiver clock offset | White noise |
| ISB | White noise |
| Troposphere | Saastamoinen model [35] + GMF [36], estimated as a piece-wise constant every hour |
| Ambiguity | Float solution, estimated as a constant for a station-satellite pair if no cycle slip |
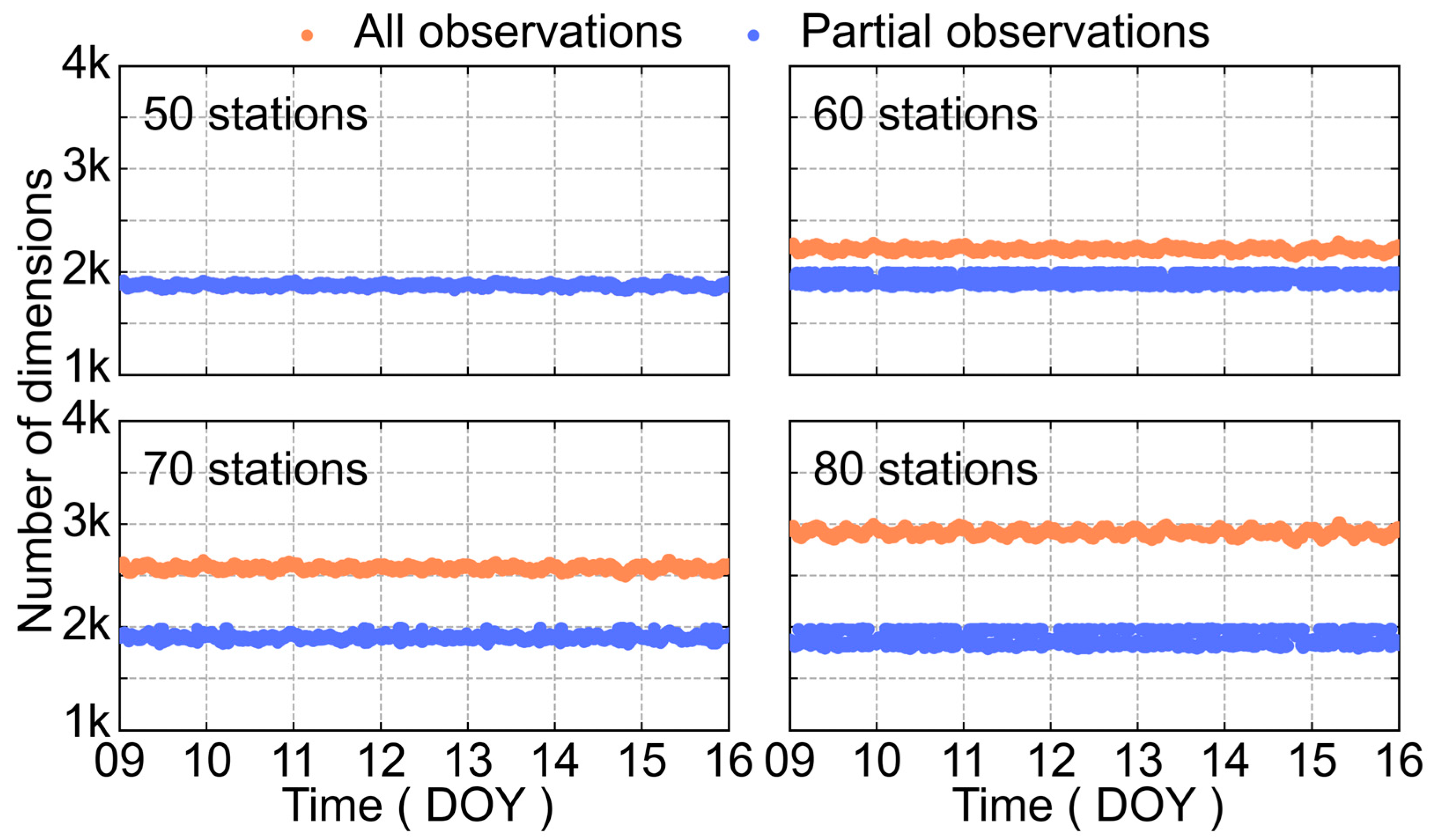
| Number of Stations | All Observations | Partial Observations | Reduction Rate |
|---|---|---|---|
| 50 | 1871 | 1871 | 0% |
| 60 | 2221 | 1932 | 13.0% |
| 70 | 2575 | 1901 | 26.2% |
| 80 | 2919 | 1890 | 35.3% |
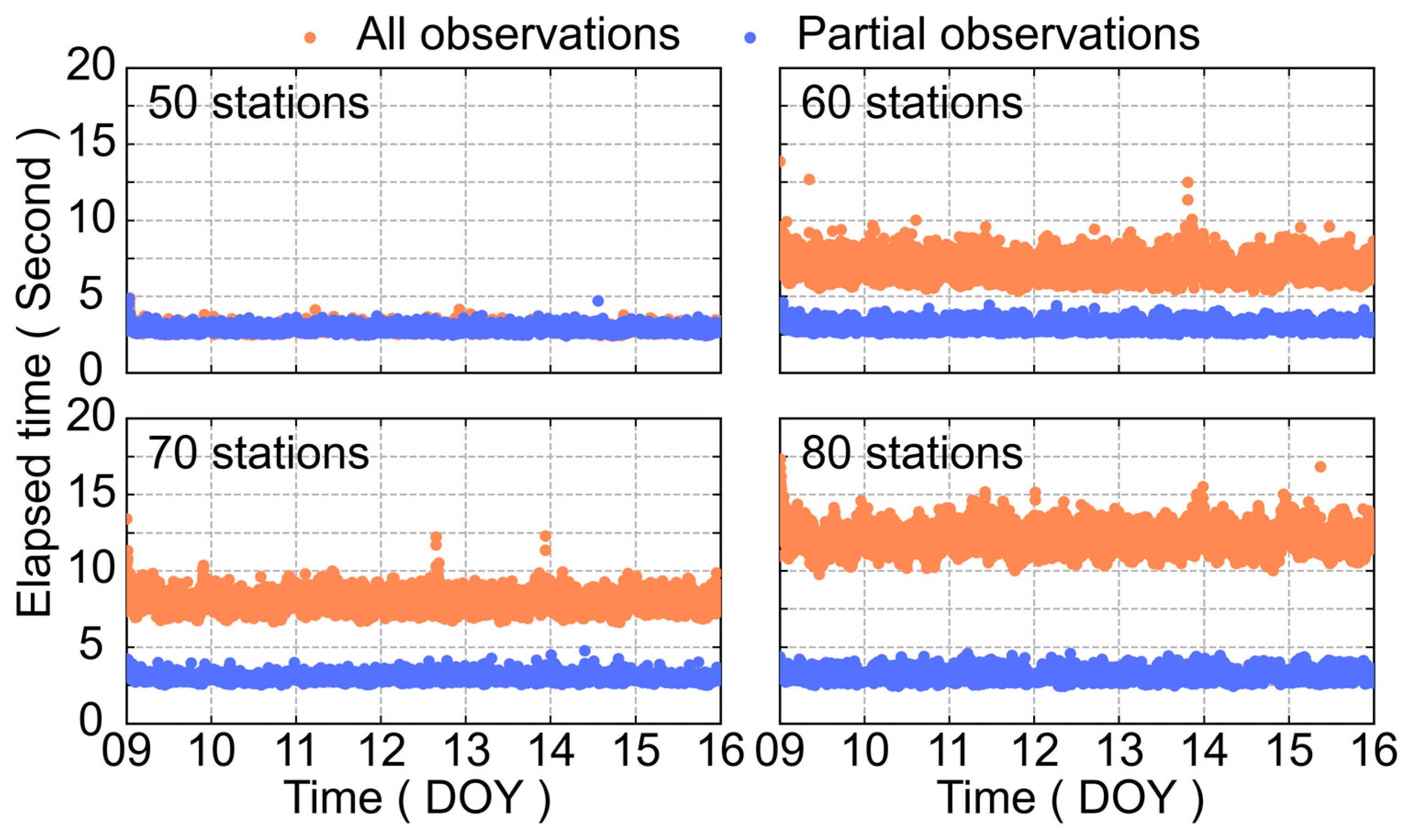
| Number of Stations | All Observations | Partial Observations | Reduction Rate |
|---|---|---|---|
| 50 | 2.86 | 2.86 | 0% |
| 60 | 6.80 | 3.10 | 54.4% |
| 70 | 7.93 | 2.97 | 62.6% |
| 80 | 12.04 | 3.14 | 73.9% |
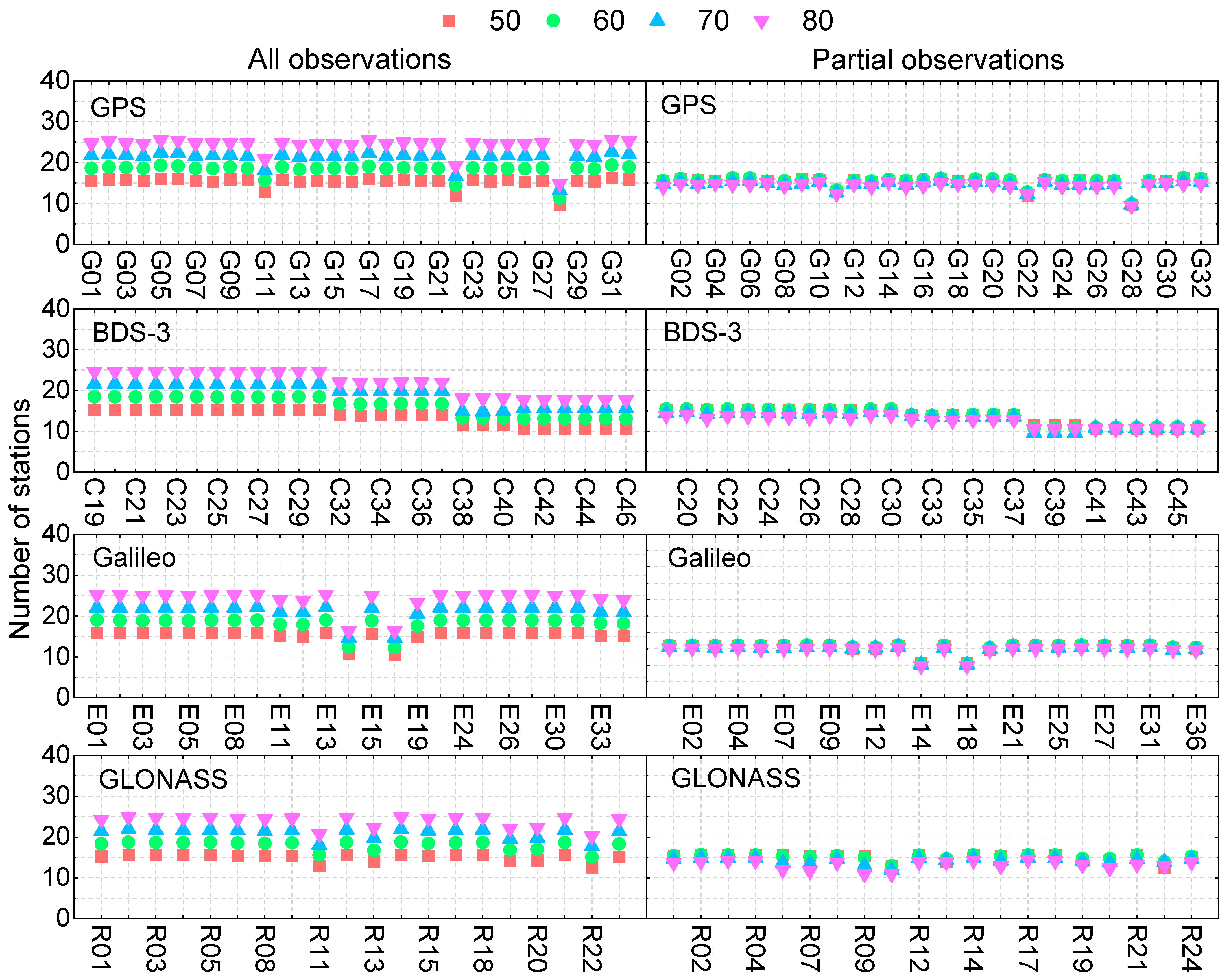
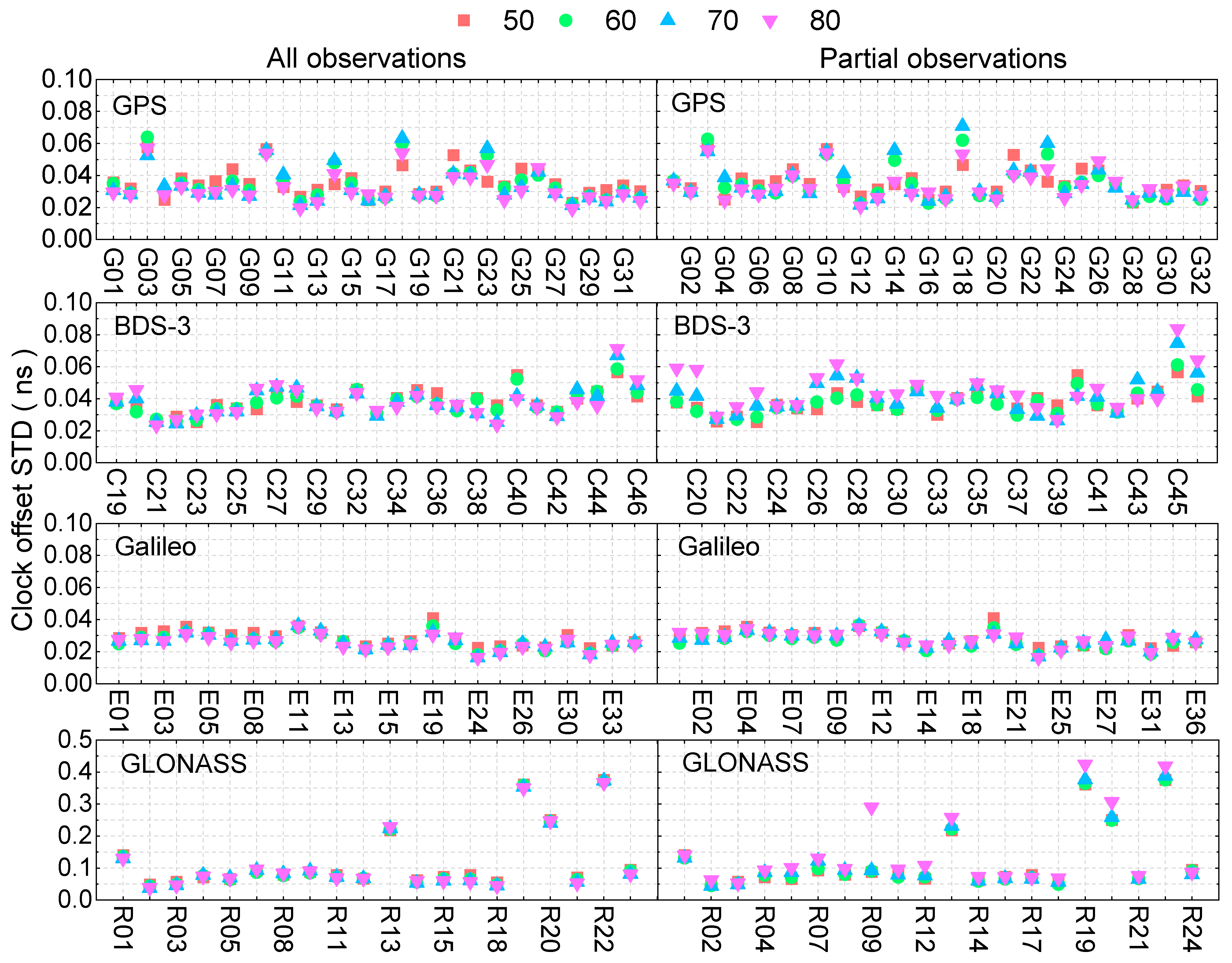
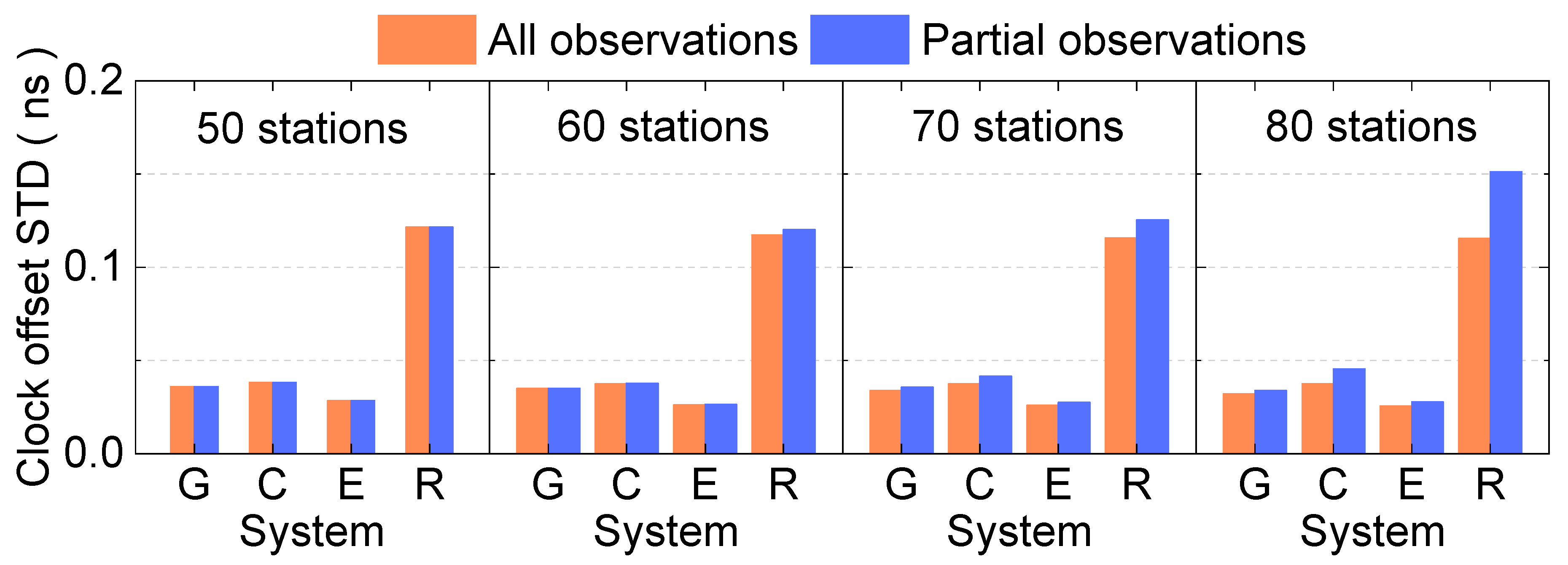
| Number of Stations | GPS | BDS-3 | Galileo | GLONASS | ||||
|---|---|---|---|---|---|---|---|---|
| All | Partial | All | Partial | All | Partial | All | Partial | |
| 50 | 0.0360 | 0.0360 | 0.0381 | 0.0381 | 0.0285 | 0.0285 | 0.1215 | 0.1215 |
| 60 | 0.0350 | 0.0351 | 0.0375 | 0.0378 | 0.0262 | 0.0265 | 0.1173 | 0.1202 |
| 70 | 0.0338 | 0.0358 | 0.0376 | 0.0416 | 0.0261 | 0.0275 | 0.1157 | 0.1255 |
| 80 | 0.0322 | 0.0338 | 0.0376 | 0.0455 | 0.0256 | 0.0278 | 0.1155 | 0.1512 |
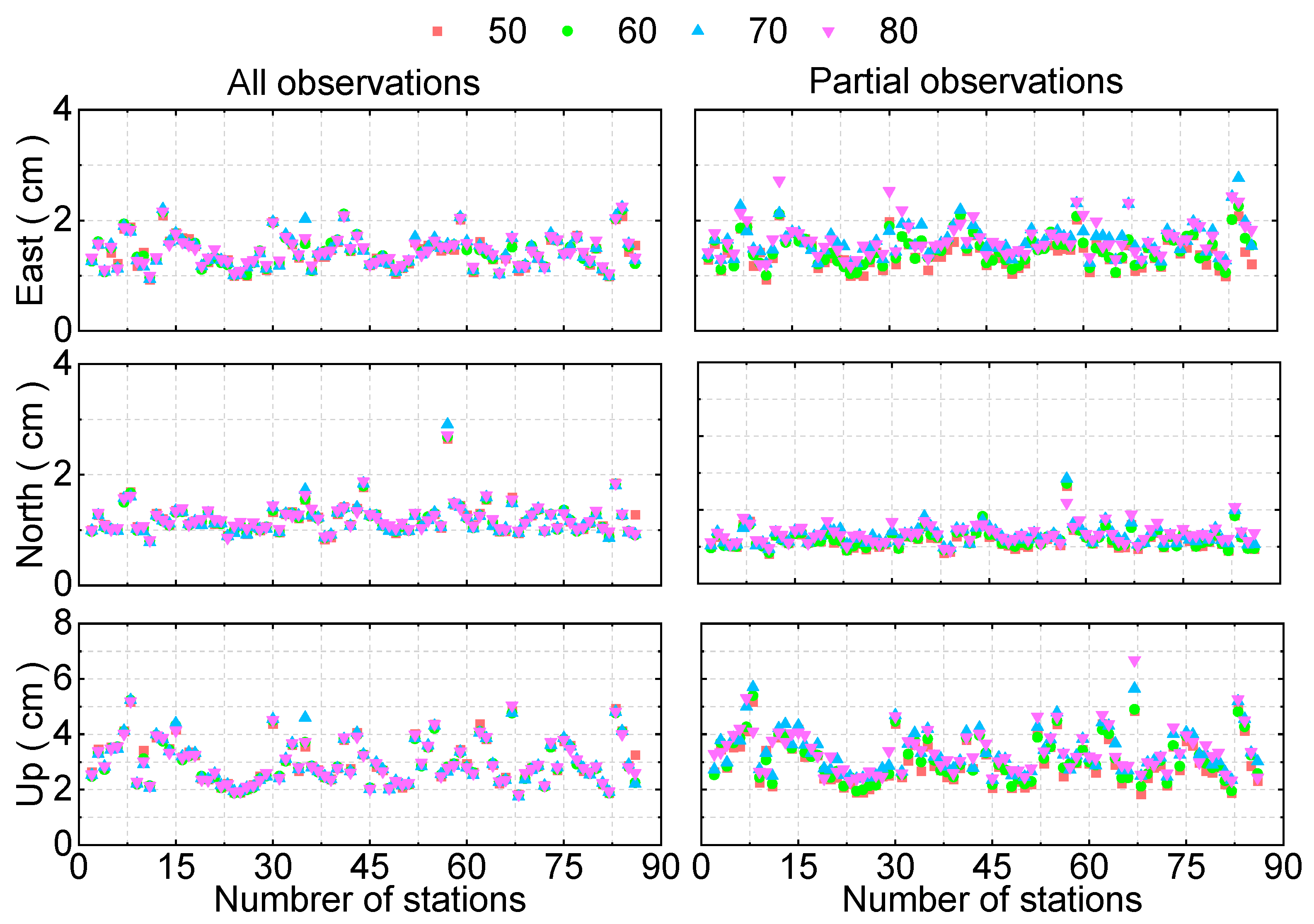
| Number of Stations | All Observations | Partial Observations | ||||
|---|---|---|---|---|---|---|
| E | N | U | E | N | U | |
| 50 | 2.30 | 1.90 | 5.35 | 2.30 | 1.90 | 5.35 |
| 60 | 2.32 | 1.87 | 5.35 | 2.28 | 1.88 | 5.44 |
| 70 | 2.40 | 1.87 | 5.24 | 2.60 | 1.99 | 5.52 |
| 80 | 2.29 | 1.91 | 5.24 | 2.68 | 2.15 | 5.58 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xie, W.; Huang, G.; Fu, W.; Du, S.; Cui, B.; Li, M.; Tan, Y. Rapid Estimation of Undifferenced Multi-GNSS Real-Time Satellite Clock Offset Using Partial Observations. Remote Sens. 2023, 15, 1776. https://doi.org/10.3390/rs15071776
Xie W, Huang G, Fu W, Du S, Cui B, Li M, Tan Y. Rapid Estimation of Undifferenced Multi-GNSS Real-Time Satellite Clock Offset Using Partial Observations. Remote Sensing. 2023; 15(7):1776. https://doi.org/10.3390/rs15071776
Chicago/Turabian StyleXie, Wei, Guanwen Huang, Wenju Fu, Shi Du, Bobin Cui, Mengyuan Li, and Yue Tan. 2023. "Rapid Estimation of Undifferenced Multi-GNSS Real-Time Satellite Clock Offset Using Partial Observations" Remote Sensing 15, no. 7: 1776. https://doi.org/10.3390/rs15071776
APA StyleXie, W., Huang, G., Fu, W., Du, S., Cui, B., Li, M., & Tan, Y. (2023). Rapid Estimation of Undifferenced Multi-GNSS Real-Time Satellite Clock Offset Using Partial Observations. Remote Sensing, 15(7), 1776. https://doi.org/10.3390/rs15071776