


LDANet: A Lightweight Dynamic Addition Network for Rural Road Extraction from Remote Sensing Images


Abstract
:1. Introduction
- A lightweight rural road extraction model is proposed and shows significant performance on two datasets, enhancing the applicability of remote sensing techniques.
- We extended shallow features using ACB-based Inception and designed a lightweight deep correlation module by referring to DSC and an adaptation-weighted overlay.
- We designed a dynamic hybrid loss function to improve the accuracy of unbalanced samples.
2. Data
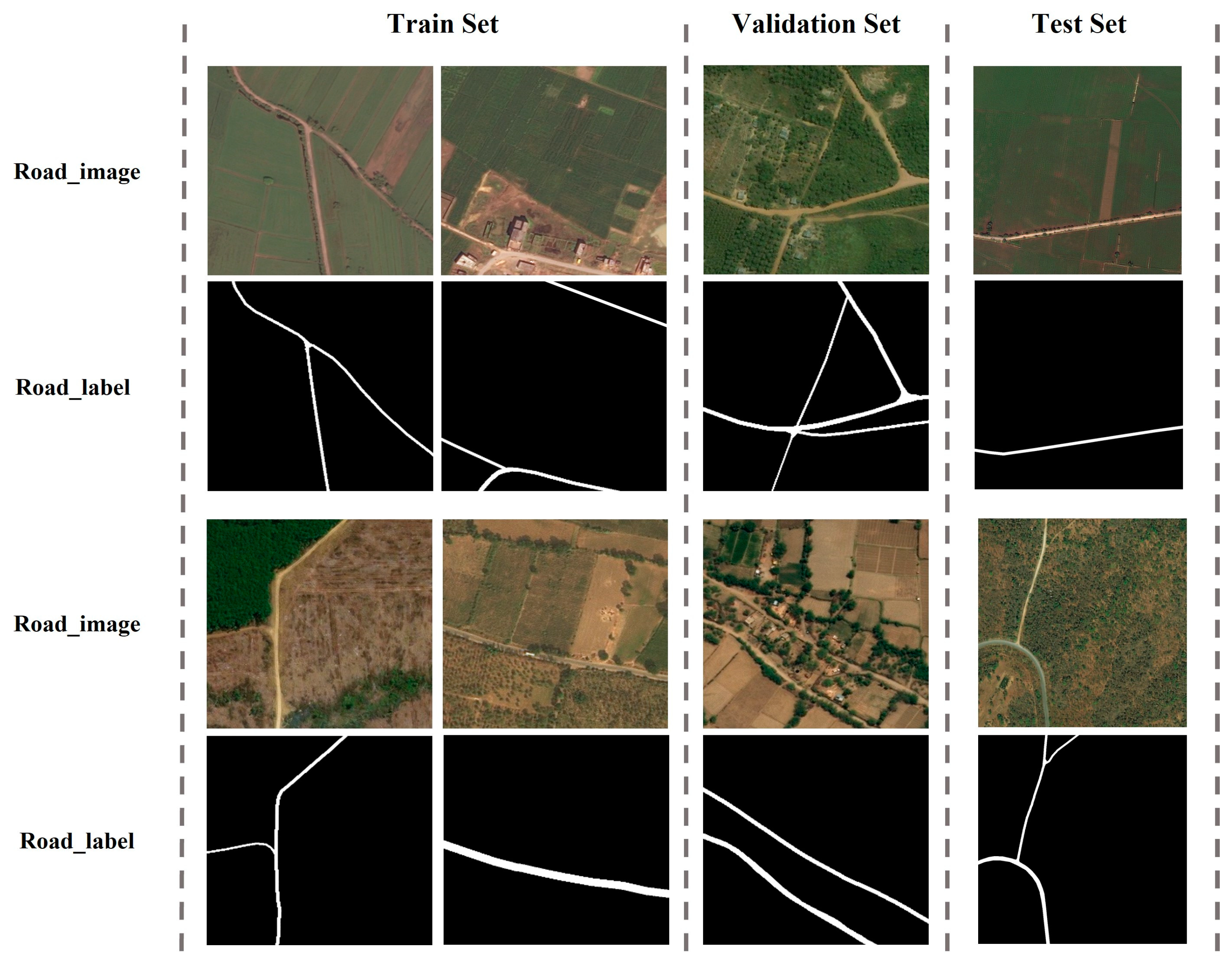
2.1. The Typical Rural Roads Dataset
2.2. The Massachusetts Roads Dataset
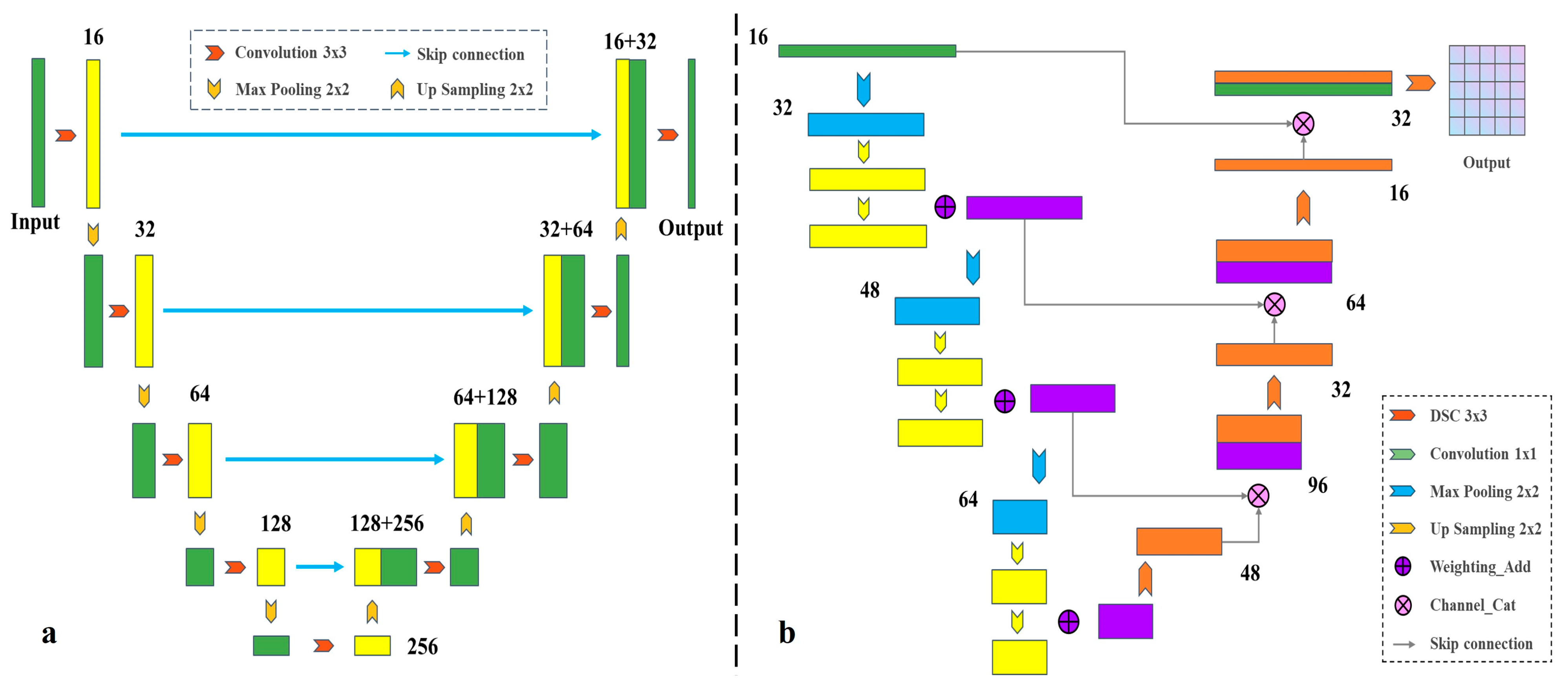
3. Methodology
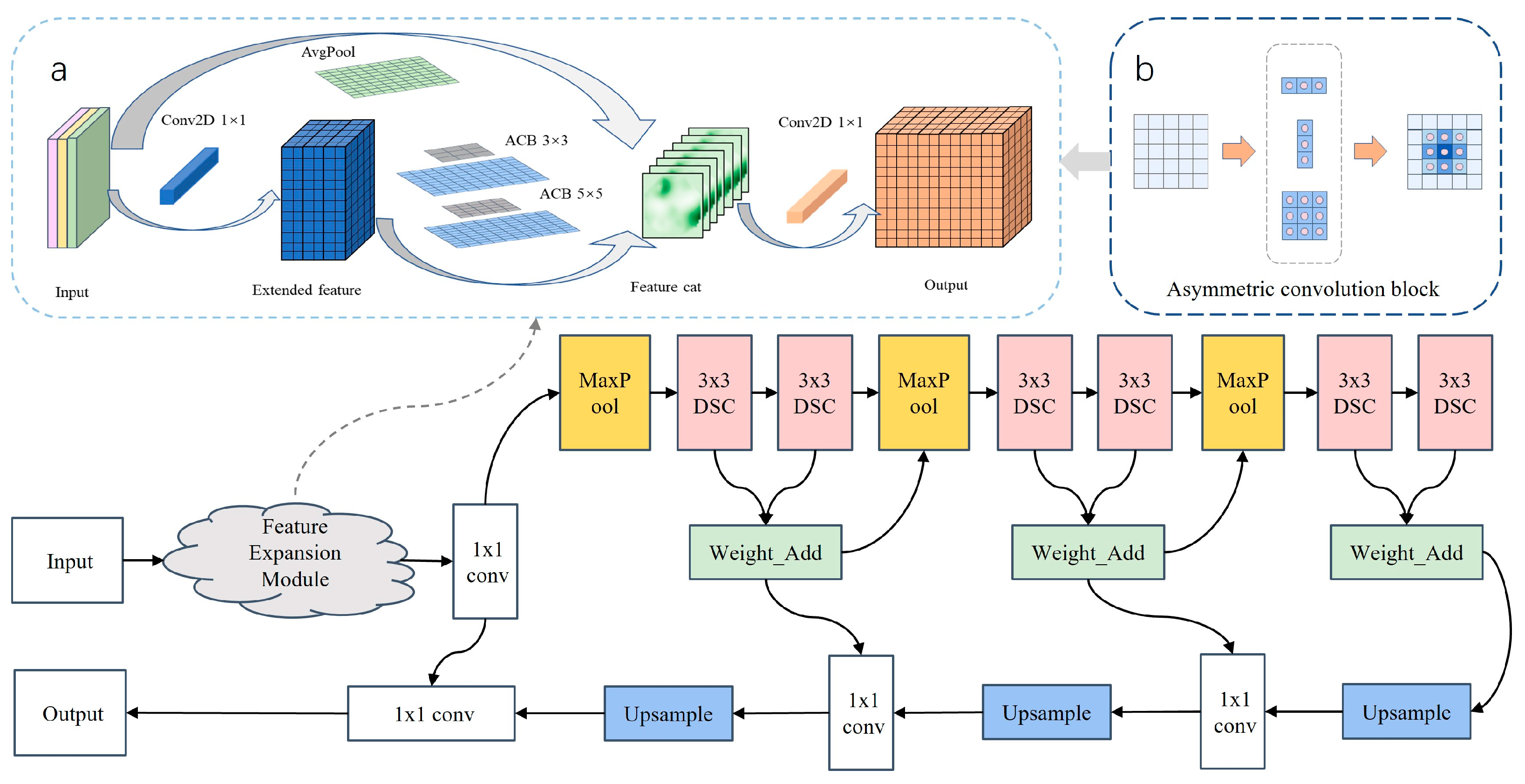
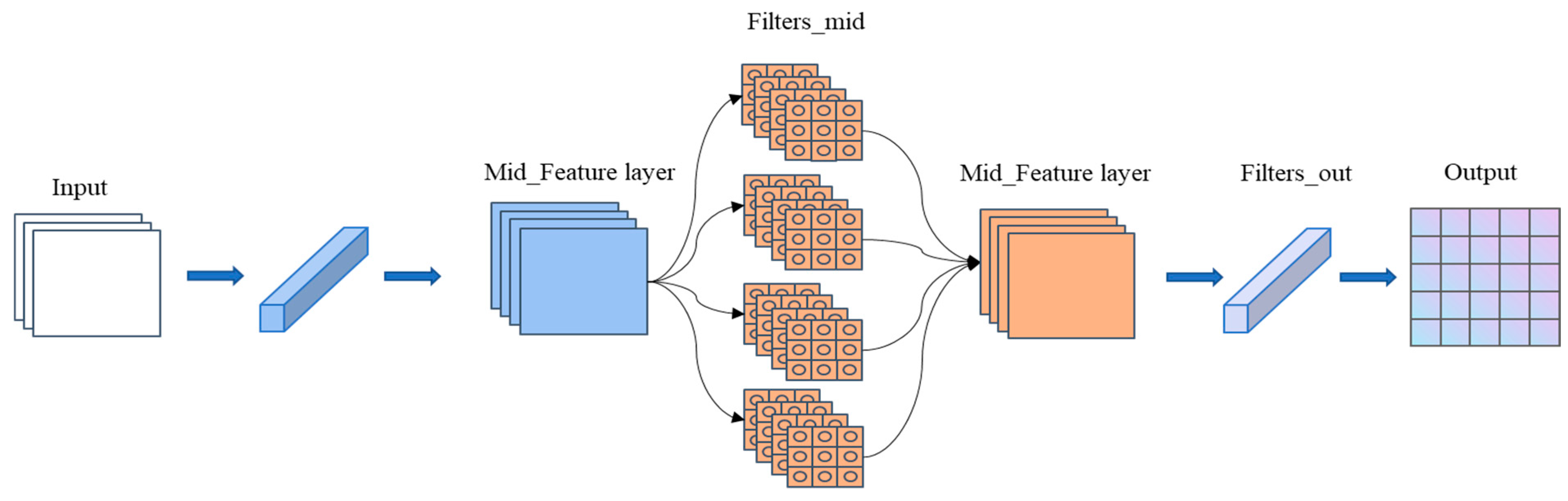
3.1. Feature Expansion Module
3.2. Deep Feature Association Module
3.3. Loss Function
4. Experimental Study
4.1. Model Evaluation Criteria
4.2. Loss Function Selection
4.3. Results and Discussion
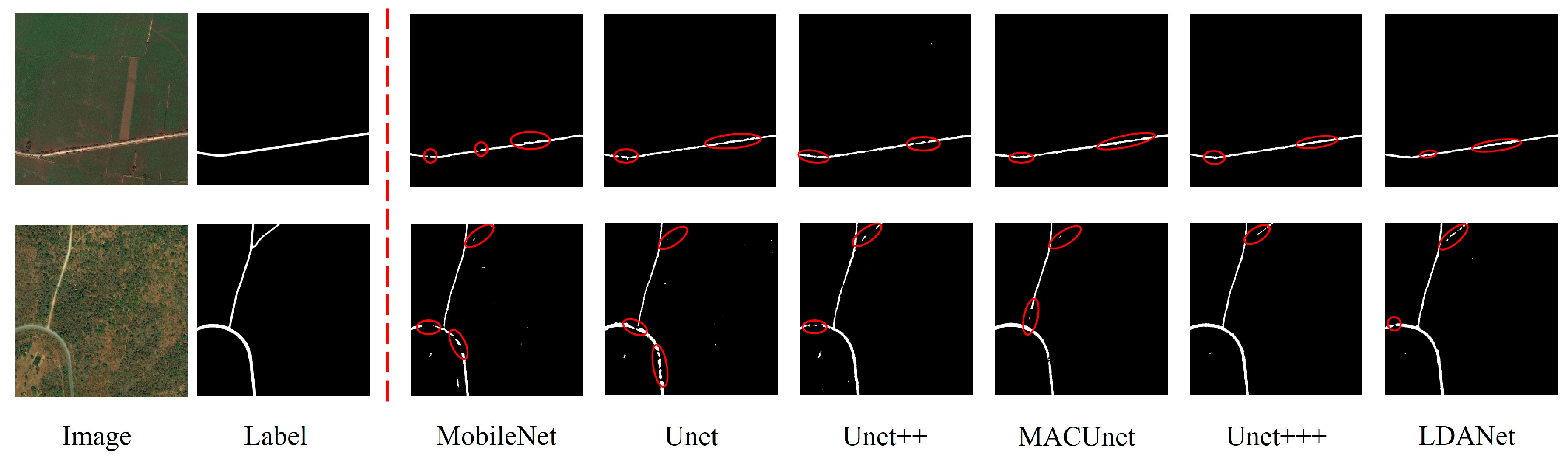
4.3.1. Results of the Typical Rural Roads Dataset
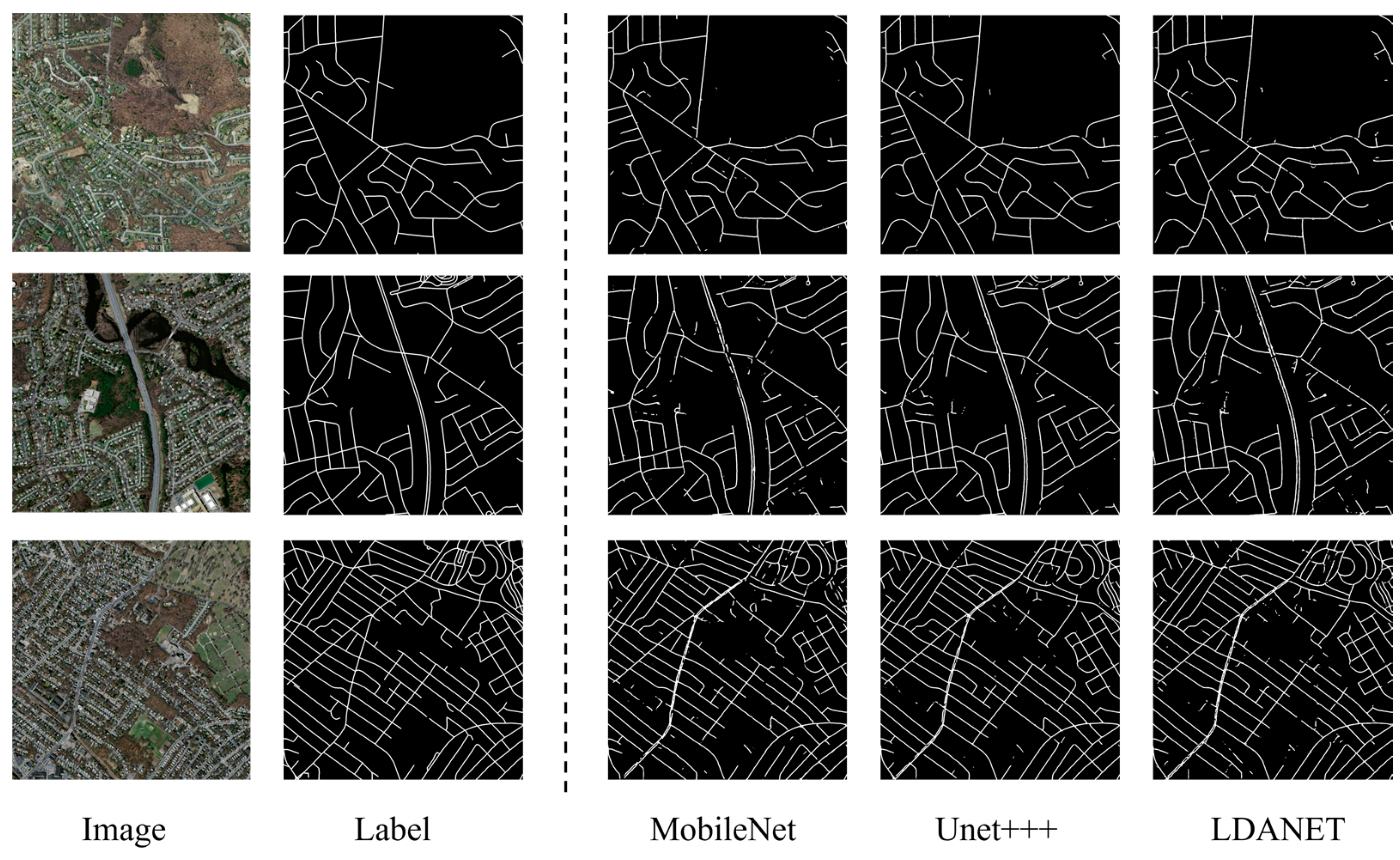
4.3.2. Results of the Massachusetts Roads Dataset
4.3.3. Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Chen, Z.; Wang, C.; Li, J.; Fan, W.; Du, J.; Zhong, B. Adaboost-like End-to-End Multiple Lightweight U-Nets for Road Extraction from Optical Remote Sensing Images. Int. J. Appl. Earth Obs. Geoinf. 2021, 100, 102341. [Google Scholar] [CrossRef]
- Jiang, X.; Li, Y.; Jiang, T.; Xie, J.; Wu, Y.; Cai, Q.; Jiang, J.; Xu, J.; Zhang, H. RoadFormer: Pyramidal Deformable Vision Transformers for Road Network Extraction with Remote Sensing Images. Int. J. Appl. Earth Obs. Geoinf. 2022, 113, 102987. [Google Scholar] [CrossRef]
- Li, C.; Zeng, Q.; Fang, J.; Wu, N.; Wu, K. Road Extraction in Rural Areas from High Resolution Remote Sensing Image Using a Improved Full Convolution Network. Natl. Remote Sens. Bull. 2021, 25, 1978–1988. [Google Scholar] [CrossRef]
- Herumurti, D.; Uchimura, K.; Koutaki, G.; Uemura, T. Urban Road Extraction Based on Hough Transform and Region Growing. In Proceedings of the FCV 2013—19th Korea-Japan Joint Workshop on Frontiers of Computer Vision, Incheon, Republic of Korea, 30 January–1 February 2013. [Google Scholar]
- Shi, W.; Miao, Z.; Debayle, J. An Integrated Method for Urban Main-Road Centerline Extraction from Optical Remotely Sensed Imagery. IEEE Trans. Geosci. Remote Sens. 2014, 52, 3359–3372. [Google Scholar] [CrossRef]
- Lian, R.; Wang, W.; Mustafa, N.; Huang, L. Road Extraction Methods in High-Resolution Remote Sensing Images: A Comprehensive Review. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2020, 13, 5489–5507. [Google Scholar] [CrossRef]
- Zhao, J.Q.; Yang, J.; Li, P.X.; Lu, J.M. Semi-Automatic Road Extraction from SAR Images Using EKF and PF. In Proceedings of the International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences—ISPRS Archives, Kona, HI, USA, 21–23 July 2015; Volume 40. [Google Scholar]
- Perciano, T.; Tupin, F.; Hirata, R.; Cesar, R.M. A Two-Level Markov Random Field for Road Network Extraction and Its Application with Optical, SAR, and Multitemporal Data. Int. J. Remote Sens. 2016, 37, 3584–3610. [Google Scholar] [CrossRef]
- Zang, Y.; Wang, C.; Cao, L.; Yu, Y.; Li, J. Road Network Extraction via Aperiodic Directional Structure Measurement. IEEE Trans. Geosci. Remote Sens. 2016, 54, 3322–3335. [Google Scholar] [CrossRef]
- Sujatha, C.; Selvathi, D. FPGA Implementation of Road Network Extraction Using Morphological Operator. Image Anal. Stereol. 2016, 35, 93–103. [Google Scholar] [CrossRef] [Green Version]
- Hinton, G.E.; Salakhutdinov, R.R. Reducing the Dimensionality of Data with Neural Networks. Science 2006, 313, 504–507. [Google Scholar] [CrossRef] [Green Version]
- Zhong, Z.; Li, J.; Cui, W.; Jiang, H. Fully Convolutional Networks for Building and Road Extraction: Preliminary Results. In Proceedings of the International Geoscience and Remote Sensing Symposium (IGARSS), Beijing, China, 10–15 July 2016; Volume 2016. [Google Scholar]
- Varia, N.; Dokania, A.; Senthilnath, J. DeepExt: A Convolution Neural Network for Road Extraction Using RGB Images Captured by UAV. In Proceedings of the 2018 IEEE Symposium Series on Computational Intelligence, SSCI, Bangalore, India, 18–21 November 2018. [Google Scholar]
- Doshi, J. Residual Inception Skip Network for Binary Segmentation. In Proceedings of the IEEE Computer Society Conference on Computer Vision and Pattern Recognition Workshops, Salt Lake City, UT, USA, 18–22 June 2018; Volume 2018. [Google Scholar]
- Zhou, L.; Zhang, C.; Wu, M. D-Linknet: Linknet with Pretrained Encoder and Dilated Convolution for High Resolution Satellite Imagery Road Extraction. In Proceedings of the IEEE Computer Society Conference on Computer Vision and Pattern Recognition Workshops, Salt Lake City, UT, USA, 18–22 June 2018; Volume 2018. [Google Scholar]
- Li, Y.; Guo, L.; Rao, J.; Xu, L.; Jin, S. Road Segmentation Based on Hybrid Convolutional Network for High-Resolution Visible Remote Sensing Image. IEEE Geosci. Remote Sens. Lett. 2019, 16, 613–617. [Google Scholar]
- Boonpook, W.; Tan, Y.; Bai, B.; Xu, B. Road Extraction from UAV Images Using a Deep ResDCLnet Architecture. Can. J. Remote Sens. 2021, 47, 450–464. [Google Scholar] [CrossRef]
- Lu, X.; Zhong, Y.; Zheng, Z.; Liu, Y.; Zhao, J.; Ma, A.; Yang, J. Multi-scale and multi-task deep learning framework for automatic road extraction. IEEE Trans. Geosci. Remote Sens. 2019, 57, 9362–9377. [Google Scholar] [CrossRef]
- Howard, A.G.; Zhu, M.; Chen, B.; Kalenichenko, D.; Wang, W.; Weyand, T.; Andreetto, M.; Adam, H. MobileNets: Efficient Convolutional Neural Networks for Mobile Vision Applications. arXiv 2017, arXiv:1704.04861. [Google Scholar]
- Sandler, M.; Howard, A.; Zhu, M.; Zhmoginov, A.; Chen, L.C. MobileNetV2: Inverted Residuals and Linear Bottlenecks. In Proceedings of the IEEE Computer Society Conference on Computer Vision and Pattern Recognition, Salt Lake City, UT, USA, 18–22 June 2018. [Google Scholar]
- Howard, A.; Sandler, M.; Chen, B.; Wang, W.; Chen, L.C.; Tan, M.; Chu, G.; Vasudevan, V.; Zhu, Y.; Pang, R.; et al. Searching for MobileNetV3. In Proceedings of the IEEE International Conference on Computer Vision, Seoul, Republic of Korea, 27 October–2 November 2019; Volume 2019. [Google Scholar]
- Ma, N.; Zhang, X.; Zheng, H.T.; Sun, J. Shufflenet V2: Practical Guidelines for Efficient Cnn Architecture Design; Lecture Notes in Computer Science (Including Subseries Lecture Notes in Artificial Intelligence and Lecture Notes in Bioinformatics); In Proceedings of the European Conference on Computer Vision (ECCV), Munich, Germany, 8–14 September 2018; Springer: Berlin/Heidelberg, Germany, 2018; Volume 11218 LNCS. [Google Scholar]
- Zhang, X.; Zhou, X.; Lin, M.; Sun, J. ShuffleNet: An Extremely Efficient Convolutional Neural Network for Mobile Devices. In Proceedings of the IEEE Computer Society Conference on Computer Vision and Pattern Recognition, Salt Lake City, UT, USA, 18–22 June 2018. [Google Scholar]
- Paszke, A.; Chaurasia, A.; Kim, S.; Culurciello, E. ENet: A Deep Neural Network Architecture for Real-Time Semantic Segmentation. arXiv 2016, arXiv:1606.02147. [Google Scholar]
- Emara, T.; Abd El Munim, H.E.; Abbas, H.M. Liteseg: A novel lightweight convnet for semantic segmentation. In Proceedings of the 2019 Digital Image Computing: Techniques and Applications (DICTA), Perth, WA, Australia, 2–4 December 2019; IEEE: Piscataway, NJ, USA, 2019; pp. 1–7. [Google Scholar]
- Romera, E.; Alvarez, J.M.; Bergasa, L.M.; Arroyo, R. ERFNet: Efficient Residual Factorized ConvNet for Real-Time Semantic Segmentation. IEEE Trans. Intell. Transp. Syst. 2018, 19, 263–272. [Google Scholar] [CrossRef]
- Chen, L.-C.; Zhu, Y.; Papandreou, G.; Schroff, F.; Adam, H. Encoder-Decoder with Atrous Separable Convolution for Semantic Image Segmentation. In Proceedings of the European Conference on Computer Vision (ECCV), Munich, Germany, 8–14 September 2018. [Google Scholar]
- Mehta, S.; Rastegari, M.; Caspi, A.; Shapiro, L.; Hajishirzi, H. ESPNet: Efficient Spatial Pyramid of Dilated Convolutions for Semantic Segmentation; Lecture Notes in Computer Science (Including Subseries Lecture Notes in Artificial Intelligence and Lecture Notes in Bioinformatics); In Proceedings of the European Conference on Computer Vision (ECCV), Glasgow, UK, 8–14 September 2018; Springer: Berlin/Heidelberg, Germany, 2018; Volume 11214 LNCS. [Google Scholar]
- Mehta, S.; Rastegari, M.; Shapiro, L.; Hajishirzi, H. ESPNetv2: A Light-Weight, Power Efficient, and General Purpose Convolutional Neural Network. In Proceedings of the IEEE Computer Society Conference on Computer Vision and Pattern Recognition, Long Beach, CA, USA, 15–20 June 2019; Volume 2019. [Google Scholar]
- Yi, Q.; Dai, G.; Shi, M.; Huang, Z.; Luo, A. ELANet: Effective Lightweight Attention-Guided Network for Real-Time Semantic Segmentation. Neural Process. Lett. 2023, 55, 1–18. [Google Scholar] [CrossRef]
- Lan, R.; Sun, L.; Liu, Z.; Lu, H.; Pang, C.; Luo, X. MADNet: A fast and lightweight network for single-image super resolution. IEEE Trans. Cybern. 2020, 51, 1443–1453. [Google Scholar] [CrossRef]
- Mnih, V. Machine Learning for Aerial Image Labeling; University of Toronto: Toronto, ON, Canada, 2013. [Google Scholar]
- Demir, I.; Koperski, K.; Lindenbaum, D.; Pang, G.; Huang, J.; Basu, S.; Hughes, F.; Tuia, D.; Raska, R. DeepGlobe 2018: A Challenge to Parse the Earth through Satellite Images. In Proceedings of the IEEE Computer Society Conference on Computer Vision and Pattern Recognition Workshops, Salt Lake City, UT, USA, 18–22 June 2018; Volume 2018. [Google Scholar]
- Ran, S.; Ding, J.; Liu, B.; Ge, X.; Ma, G. Multi-U-Net: Residual module under multisensory field and attention mechanism based optimized U-Net for VHR image semantic segmentation. Sensors 2021, 21, 1794. [Google Scholar] [CrossRef] [PubMed]
- Wang, W.; Yang, N.; Zhang, Y.; Wang, F.; Cao, T.; Eklund, P. A Review of Road Extraction from Remote Sensing Images. J. Traffic Transp. Eng. Engl. Ed. 2016, 3, 271–282. [Google Scholar] [CrossRef] [Green Version]
- DIng, X.; Guo, Y.; DIng, G.; Han, J. ACNet: Strengthening the Kernel Skeletons for Powerful CNN via Asymmetric Convolution Blocks. In Proceedings of the IEEE International Conference on Computer Vision, Seoul, Republic of Korea, 27 October–2 November 2019; Volume 2019. [Google Scholar]
- Ronneberger, O.; Fischer, P.; Brox, T. U-Net: Convolutional Networks for Biomedical Image Segmentation. In Proceedings of the Medical Image Computing and Computer-Assisted Intervention—MICCAI 2015: 18th International Conference, Munich, Germany, 5–9 October 2015; Springer: Berlin/Heidelberg, Germany, 2015; pp. 234–241. [Google Scholar]
- Zhou, Z.; Siddiquee, M.M.R.; Tajbakhsh, N.; Liang, J. Unet++: Redesigning Skip Connections to Exploit Multiscale Features in Image Segmentation. IEEE Trans. Med. Imaging 2019, 39, 1856–1867. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Huang, H.; Lin, L.; Tong, R.; Hu, H.; Zhang, Q.; Iwamoto, Y.; Han, X.; Chen, Y.W.; Wu, J. UNet 3+: A Full-Scale Connected UNet for Medical Image Segmentation. In Proceedings of the ICASSP, IEEE International Conference on Acoustics, Speech and Signal Processing, Barcelona, Spain, 4–8 May 2020; Volume 2020. [Google Scholar]
- Ren, Y.; Zhang, X.; Ma, Y.; Yang, Q.; Wang, C.; Liu, H.; Qi, Q. Full Convolutional Neural Network Based on Multi-Scale Feature Fusion for the Class Imbalance Remote Sensing Image Classification. Remote Sens. 2020, 12, 3547. [Google Scholar] [CrossRef]
- Li, R.; Duan, C.; Zheng, S.; Zhang, C.; Atkinson, P.M. MACU-Net for Semantic Segmentation of Fine-Resolution Remotely Sensed Images. IEEE Geosci. Remote Sens. Lett. 2022, 19, 8007205. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Precision | IoU | |
|---|---|---|
| BCE Loss | 0.9862 | 0.7322 |
| Dice Loss | 0.9850 | 0.7561 |
| BCE Loss + Dice Loss | 0.9866 | 0.7605 |
| CWL | 0.9874 | 0.7621 |
| Precision | Recall | F1 Score | IoU | Parameters (M) | Train Time/Epoch (S) | |
|---|---|---|---|---|---|---|
| Unet | 0.9754 | 0.9728 | 0.9741 | 0.7482 | 9.85 | 580 |
| Unet++ | 0.9831 | 0.9822 | 0.9826 | 0.7593 | 11.80 | 1318 |
| Unet+++ | 0.9881 | 0.9875 | 0.9878 | 0.7644 | 6.75 | 1530 |
| MACUnet | 0.9840 | 0.9817 | 0.9829 | 0.7617 | 5.15 | 725 |
| MobileNet | 0.9683 | 0.9632 | 0.9657 | 0.7431 | 0.17 | 178 |
| LDANet | 0.9874 | 0.9870 | 0.9872 | 0.7621 | 0.20 | 183 |
| Precision (%) | Recall | F1 Score | IoU | Parameters (M) | Train Time/Epoch (S) | |
|---|---|---|---|---|---|---|
| Unet | 0.9612 | 0.9584 | 0.9598 | 0.6513 | 9.85 | 480 |
| Unet++ | 0.9710 | 0.9667 | 0.9688 | 0.6769 | 11.80 | 1130 |
| Unet+++ | 0.9768 | 0.9716 | 0.9742 | 0.6957 | 6.75 | 1280 |
| MACUnet | 0.9721 | 0.9683 | 0.9702 | 0.6774 | 5.15 | 605 |
| MobileNet | 0.9533 | 0.9412 | 0.9472 | 0.6455 | 0.17 | 152 |
| LDANet | 0.9755 | 0.9707 | 0.9731 | 0.6834 | 0.20 | 163 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, B.; Ding, J.; Zou, J.; Wang, J.; Huang, S. LDANet: A Lightweight Dynamic Addition Network for Rural Road Extraction from Remote Sensing Images. Remote Sens. 2023, 15, 1829. https://doi.org/10.3390/rs15071829
Liu B, Ding J, Zou J, Wang J, Huang S. LDANet: A Lightweight Dynamic Addition Network for Rural Road Extraction from Remote Sensing Images. Remote Sensing. 2023; 15(7):1829. https://doi.org/10.3390/rs15071829
Chicago/Turabian StyleLiu, Bohua, Jianli Ding, Jie Zou, Jinjie Wang, and Shuai Huang. 2023. "LDANet: A Lightweight Dynamic Addition Network for Rural Road Extraction from Remote Sensing Images" Remote Sensing 15, no. 7: 1829. https://doi.org/10.3390/rs15071829
APA StyleLiu, B., Ding, J., Zou, J., Wang, J., & Huang, S. (2023). LDANet: A Lightweight Dynamic Addition Network for Rural Road Extraction from Remote Sensing Images. Remote Sensing, 15(7), 1829. https://doi.org/10.3390/rs15071829