
Contribution to Uncertainty Propagation Associated with On-Site Calibration of Infrasound Monitoring Systems
 , ,
, , {kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Materials and Methods
2.1. Estimation Method with the Time-Delay-Of-Arrival (TDOA) Algorithm
2.2. Analysis of the Measurement Process
2.3. Proposed Methodology for Modeling and Propagating Sensor Calibration Uncertainty
2.3.1. Modeling Microbarometer Calibration Uncertainty
2.3.2. Determination of the Gabrielson Transfer Function
2.3.3. Modeling the Uncertainty Associated with the Sensor
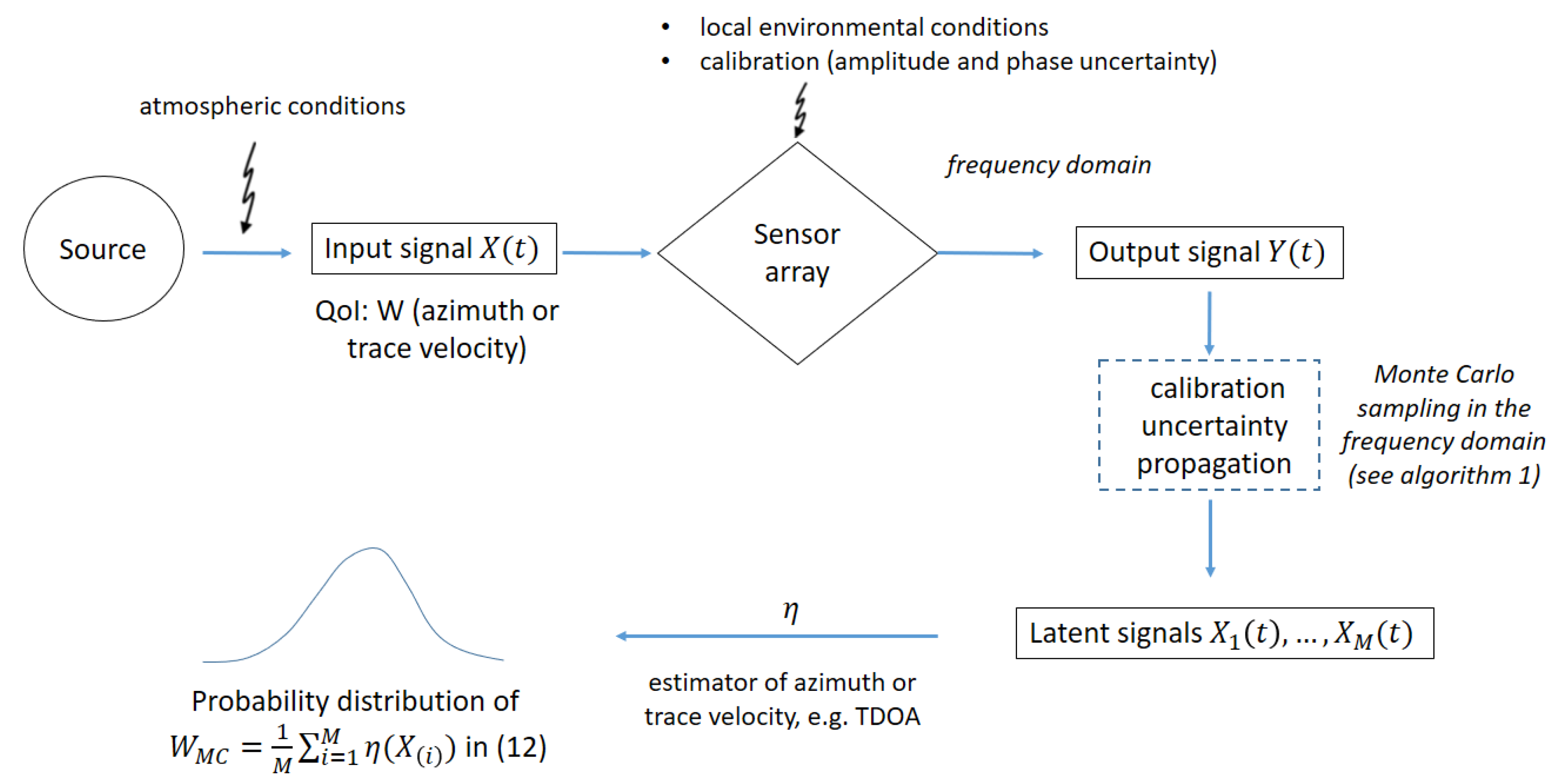
2.3.4. Monte Carlo Method Using Latent Input Signals for Uncertainty Propagation
| Algorithm 1: Algorithm for sampling latent signals from (20). | ||
| Data: transfer function of the sensor defined in (14), observed output signal | ||
| , number of Monte Carlo simulations M | ||
| Result: M latent signal sampled from (20) | ||
| while do | ||
| generate according to (15); /* sample latent signal | ||
| amplitude /* | ||
| generate according to (16); /* sample latent signal | ||
| phase */ | ||
| compute ; | ||
| compute ; | ||
| end | ||
3. Results
3.1. Uncertainty Propagation Results for Infinite SNR and Operating WNRS
3.2. Sensitivity Study
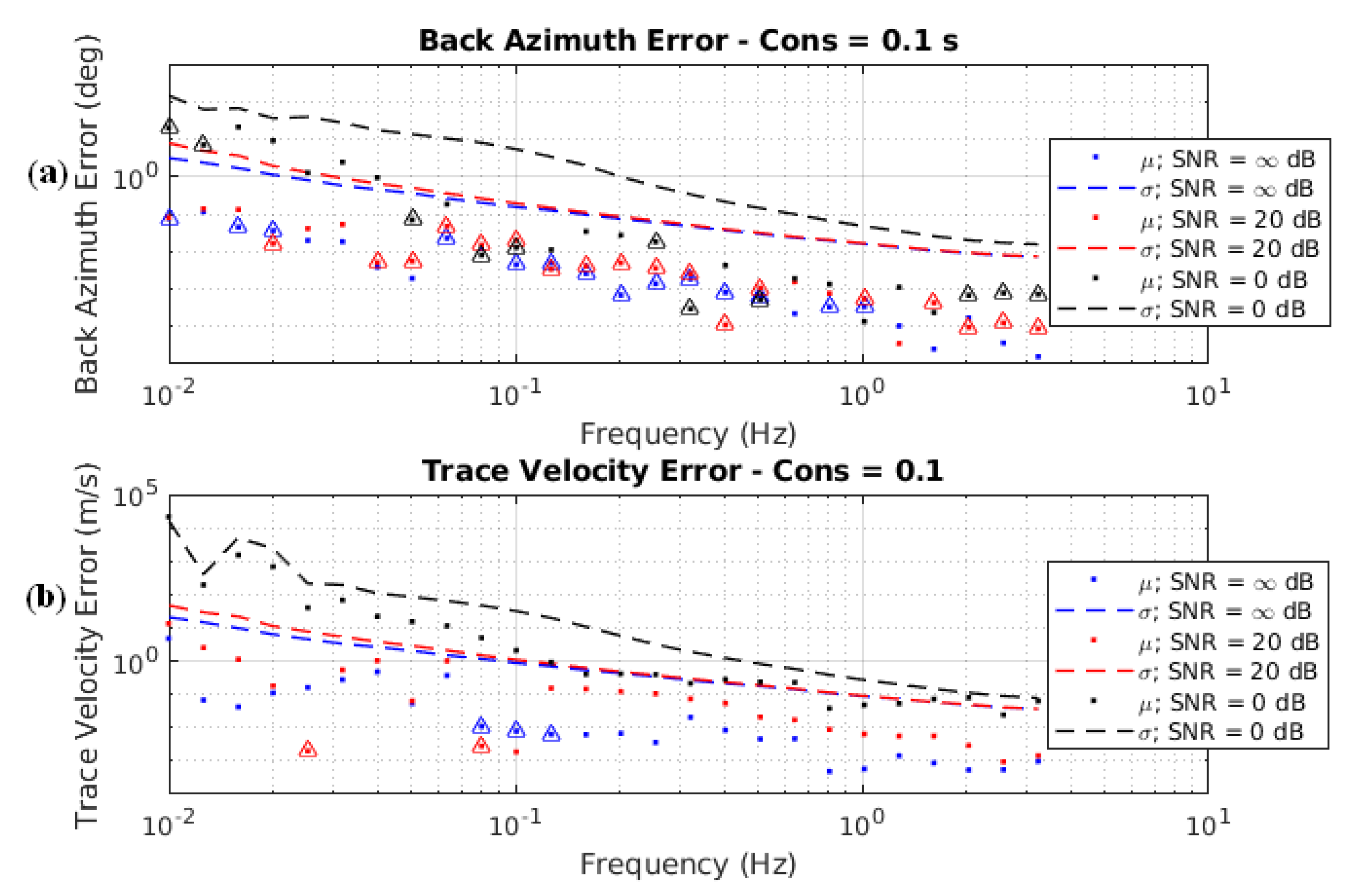
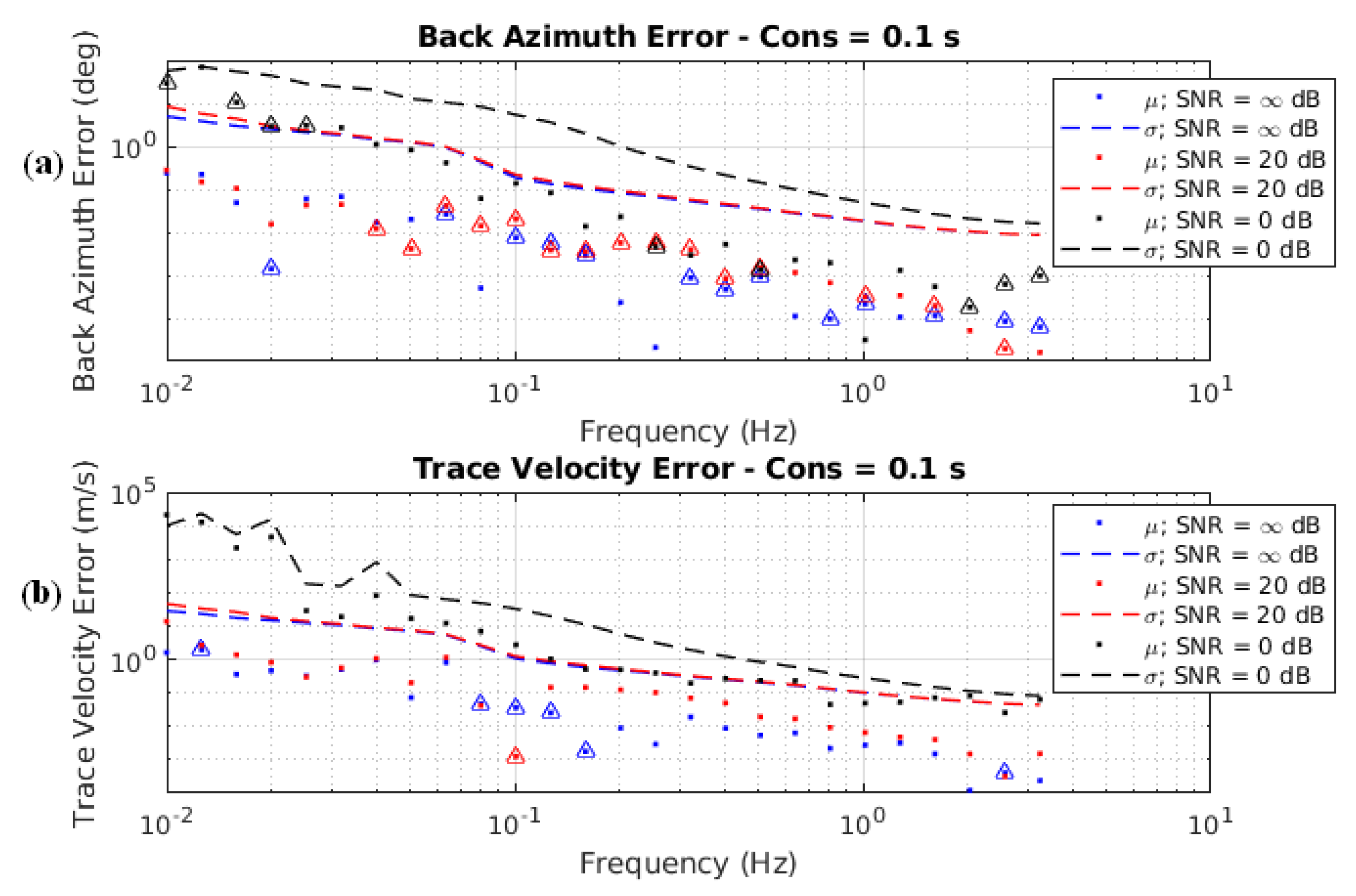
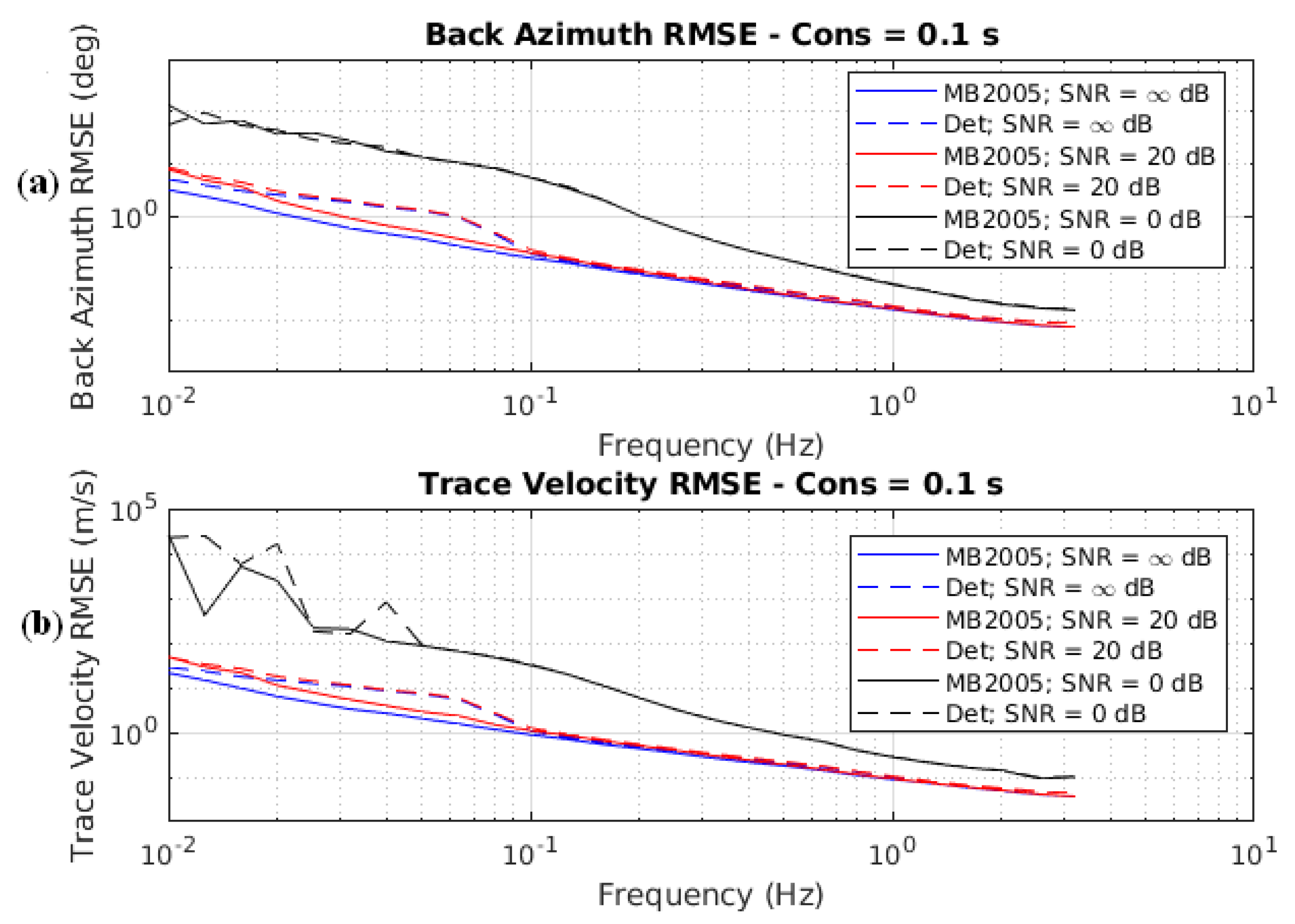
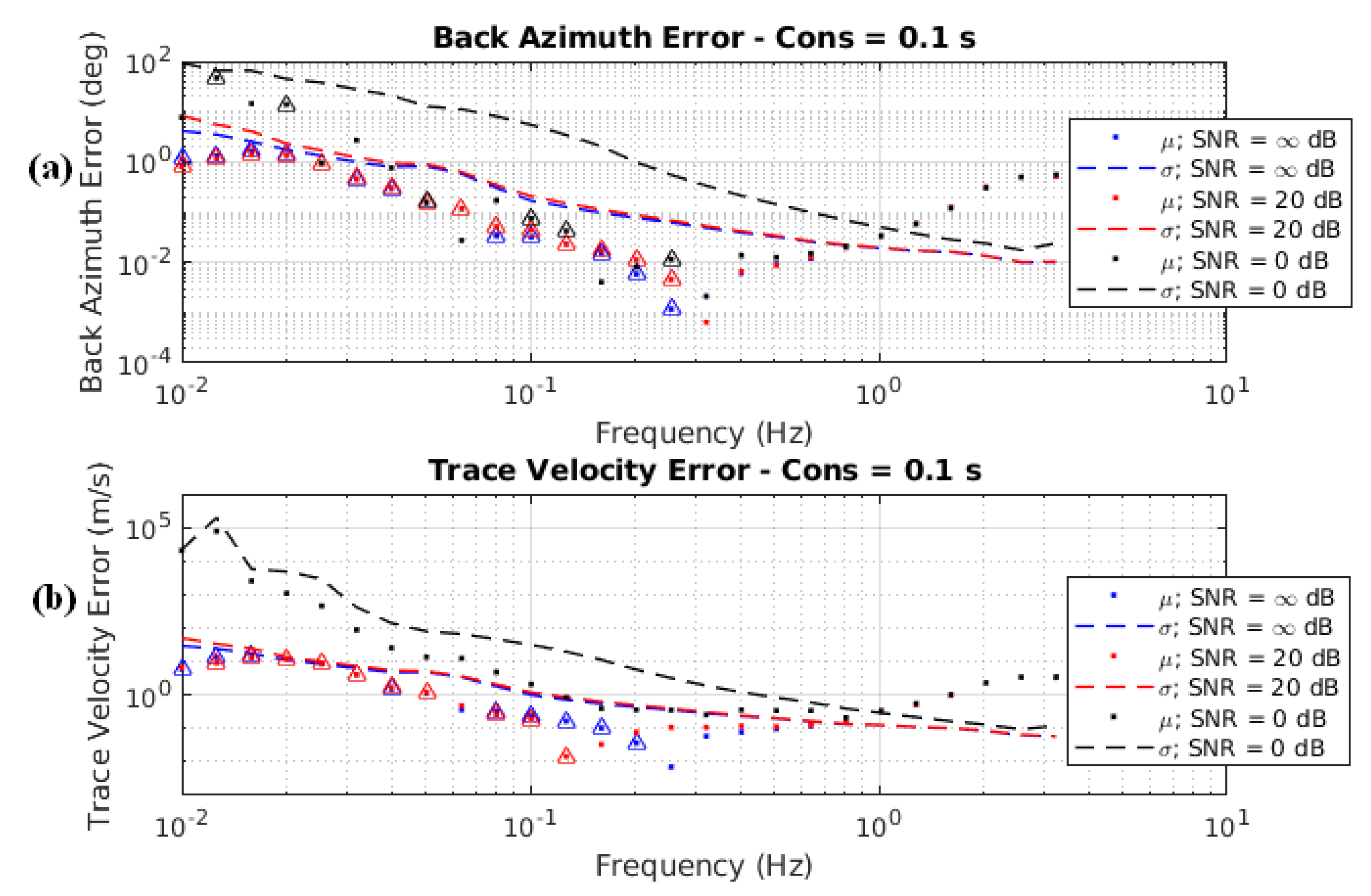
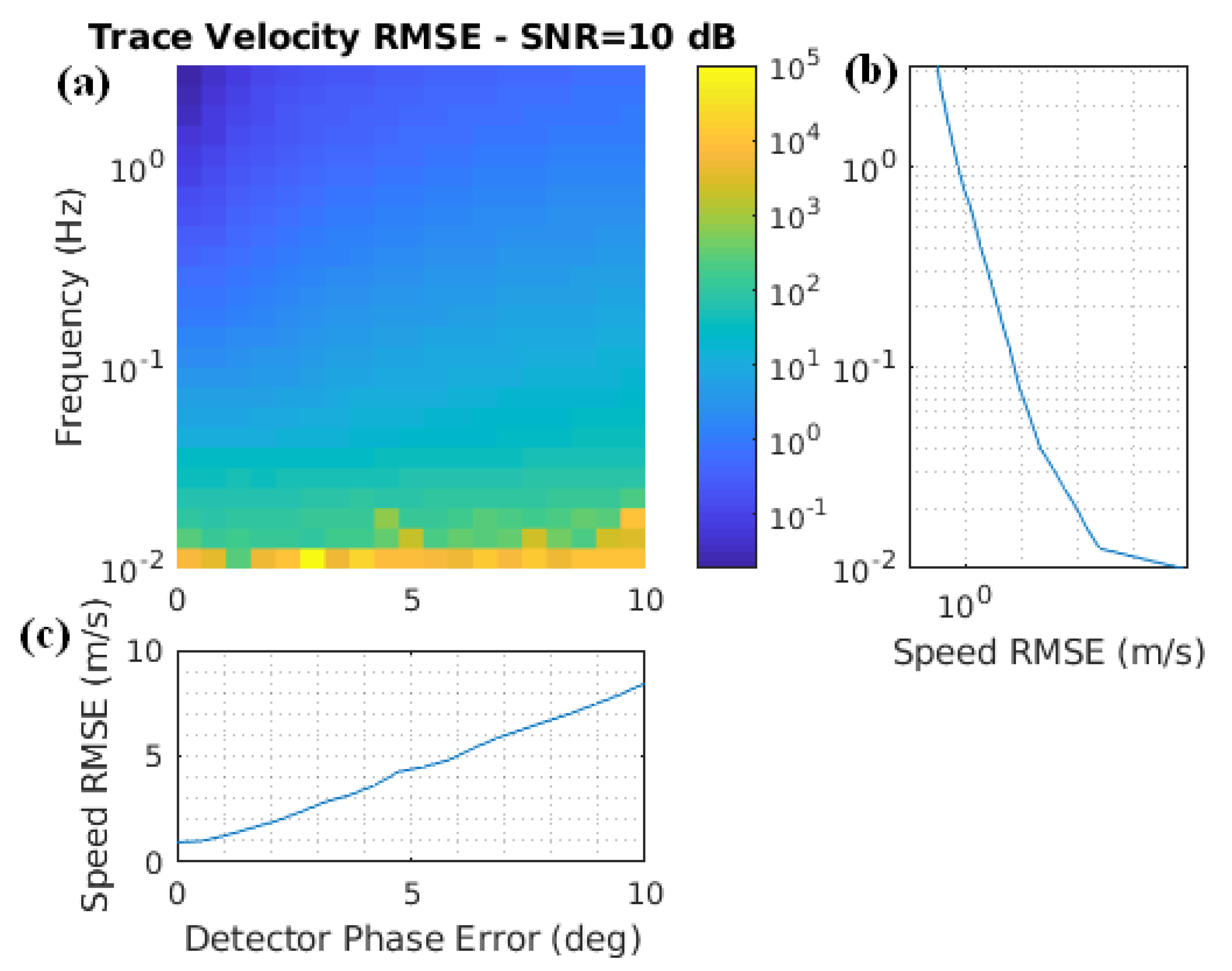
3.2.1. Results for Different SNR
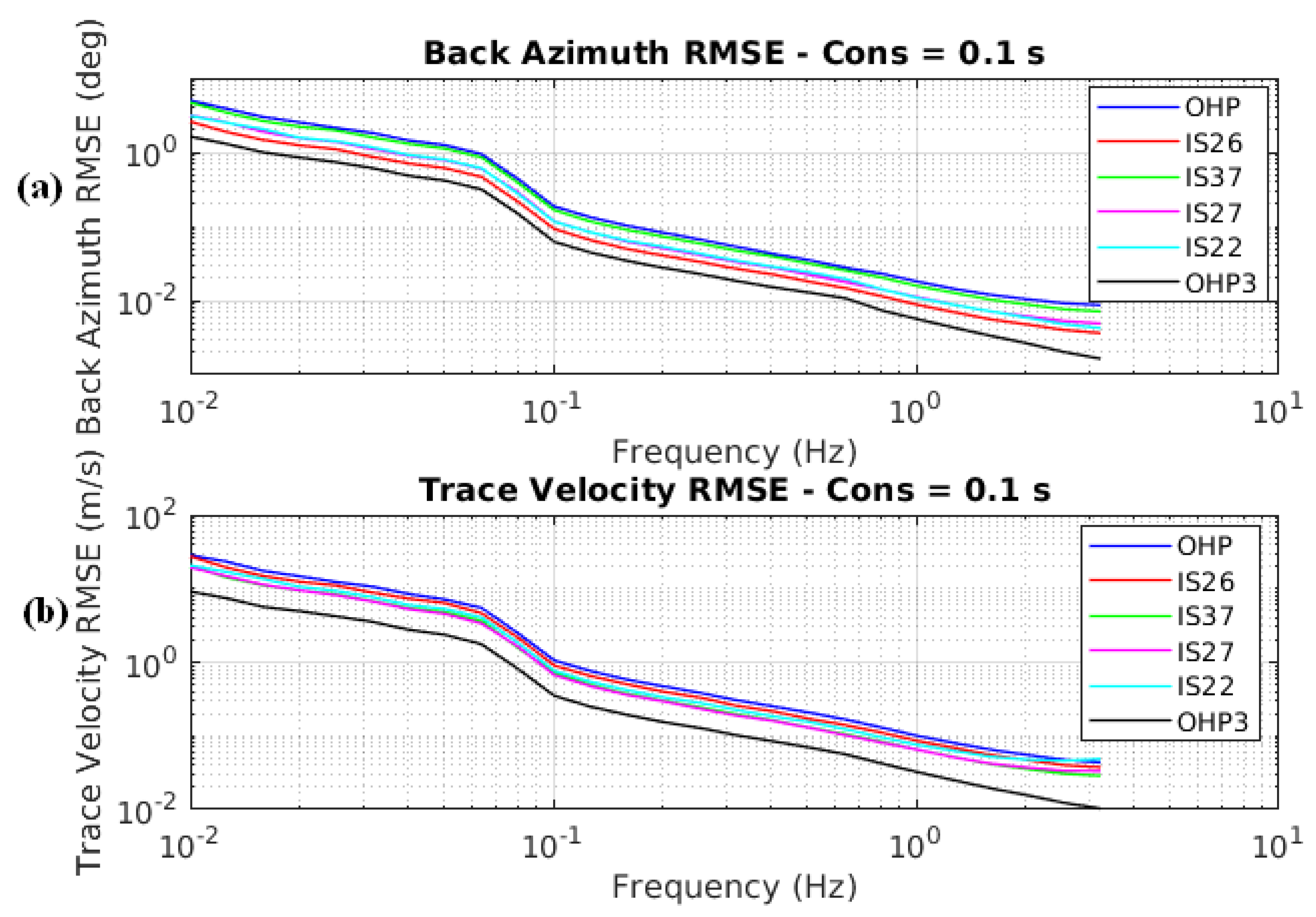
3.2.2. Results for Different Sensor Arrays
3.2.3. Results for a Defective WNRS
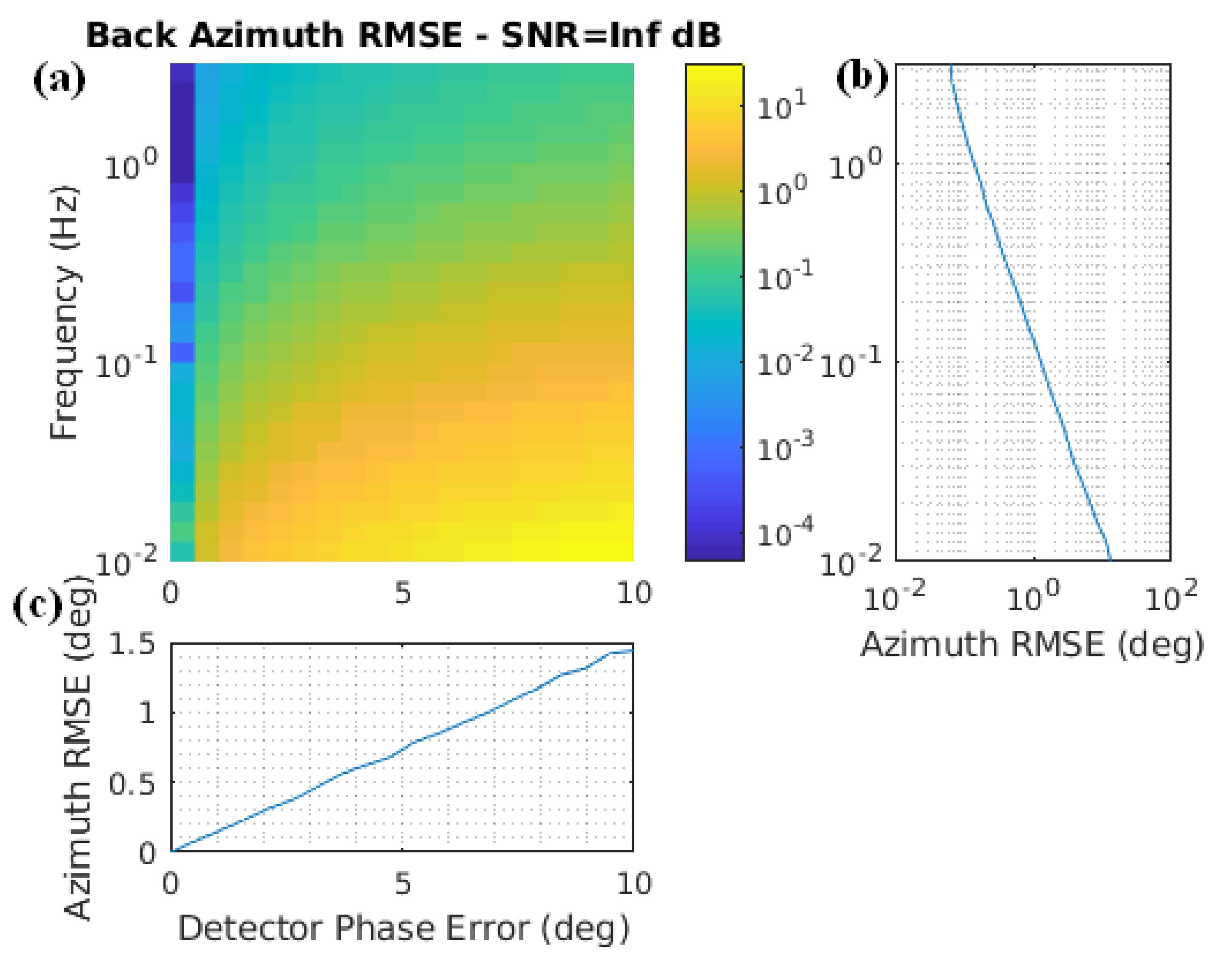
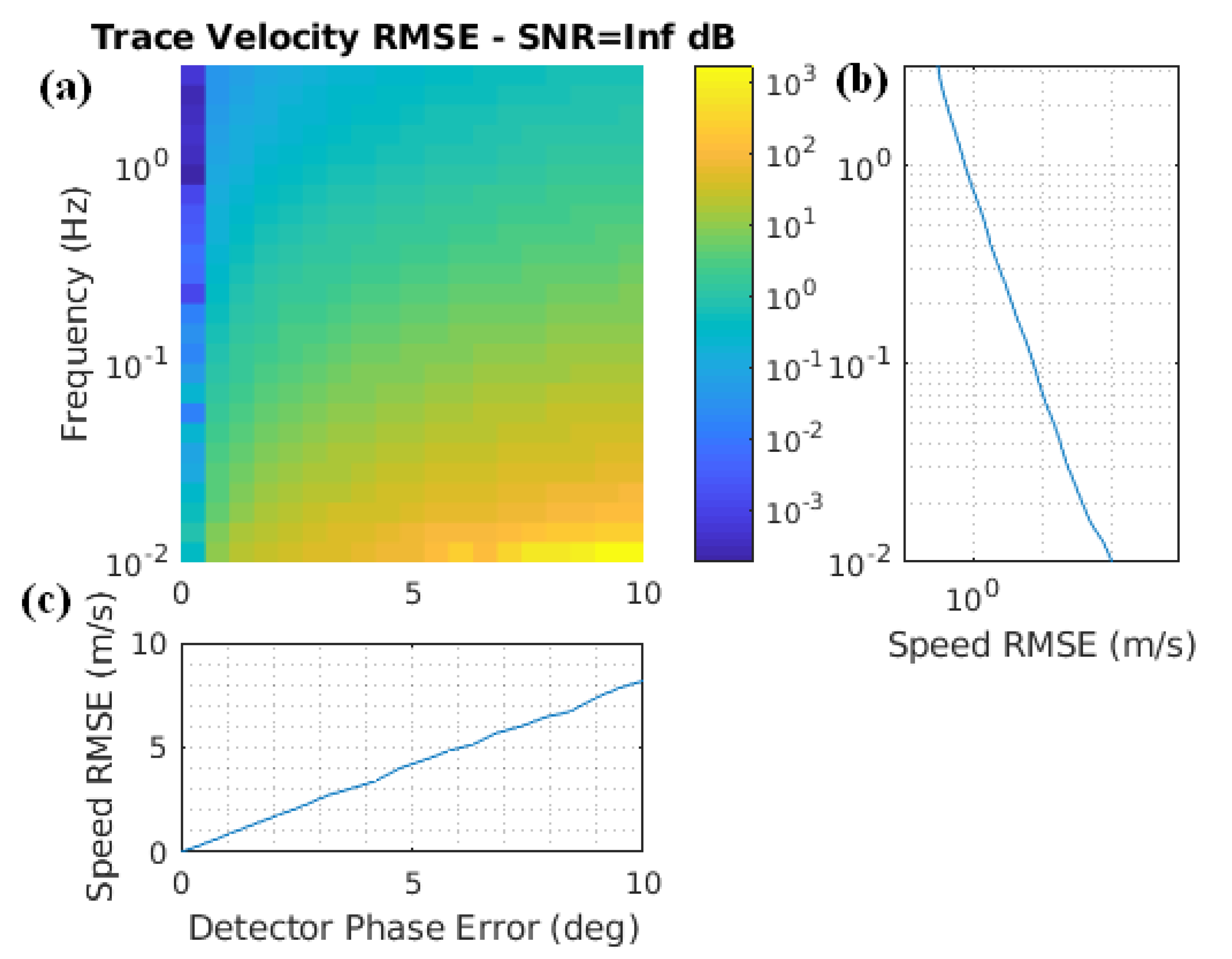
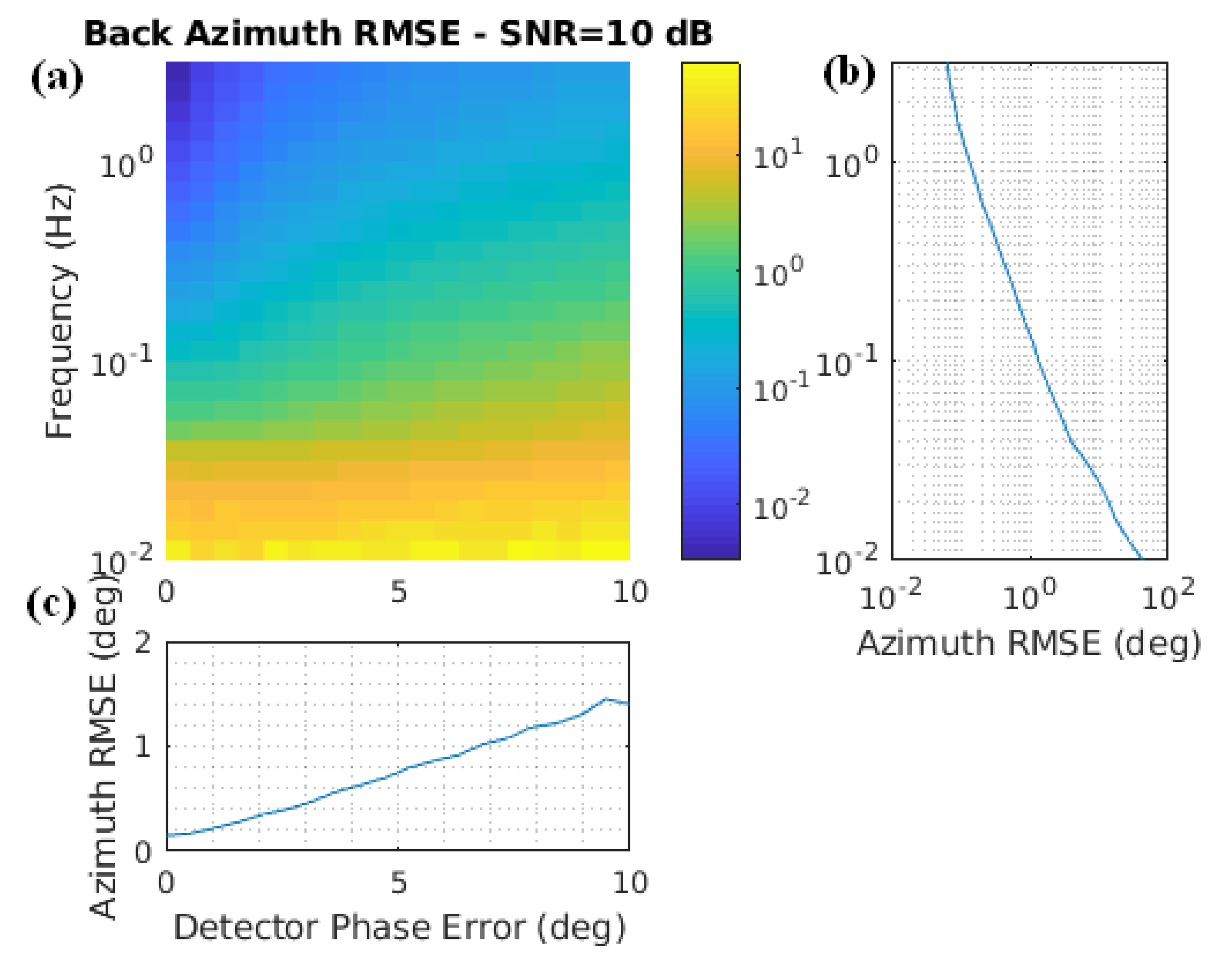
3.3. Sensor Phase Uncertainty
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| Fourier transform | |
| root mean squared error | |
| time difference of arrival | |
| PMCC | progressive multi-channel correlation |
| QoI | quantity of interest |
| WNRS | wind noise reduction system |
| SNR | signal-to-noise ratio |
| SOI | signal of interest |
| CTBTO | Comprehensive Test Ban Treaty Organization |
| CEA | Commissariat à l’Energie Atomique et aux Energies Alternatives |
| OHP | Observatoire de Haute Provence |
| IMS | International Monitoring System |
| MB | microbarometer |
| H | transfer function of the MB or the sensor |
| h | mean response of the MB or the sensor |
Appendix A. Signal Simulation from Sensors in an Array
Appendix B. Results with SNR = Inf
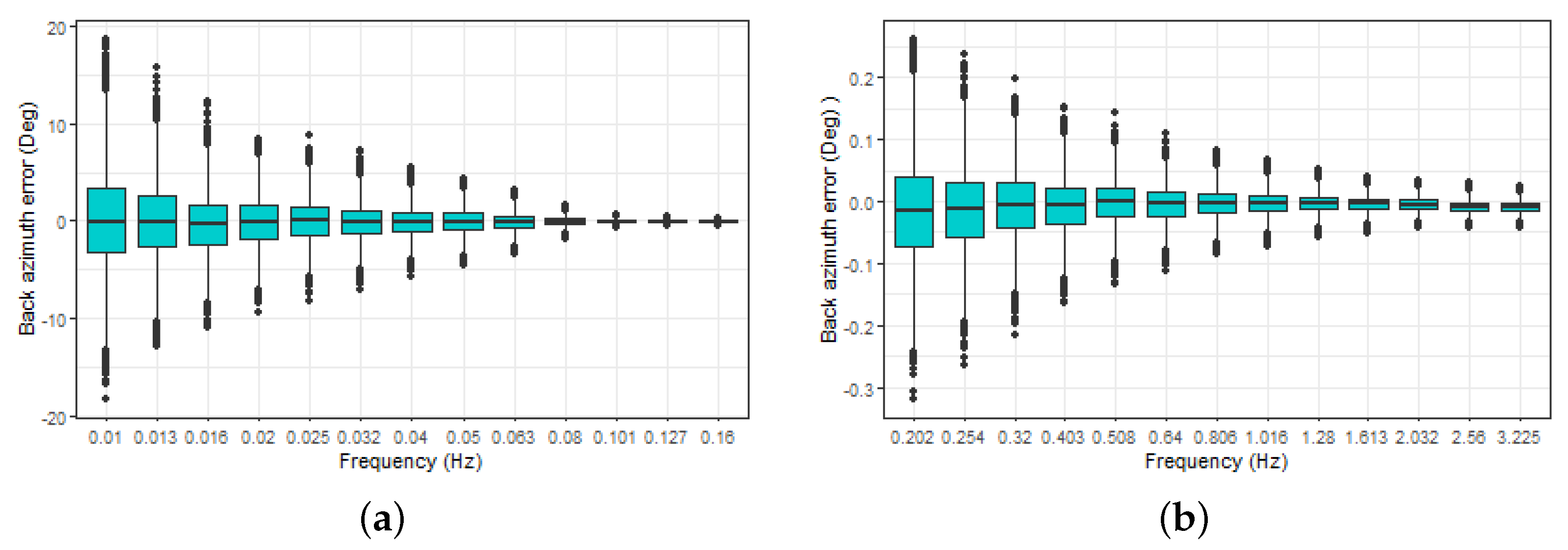
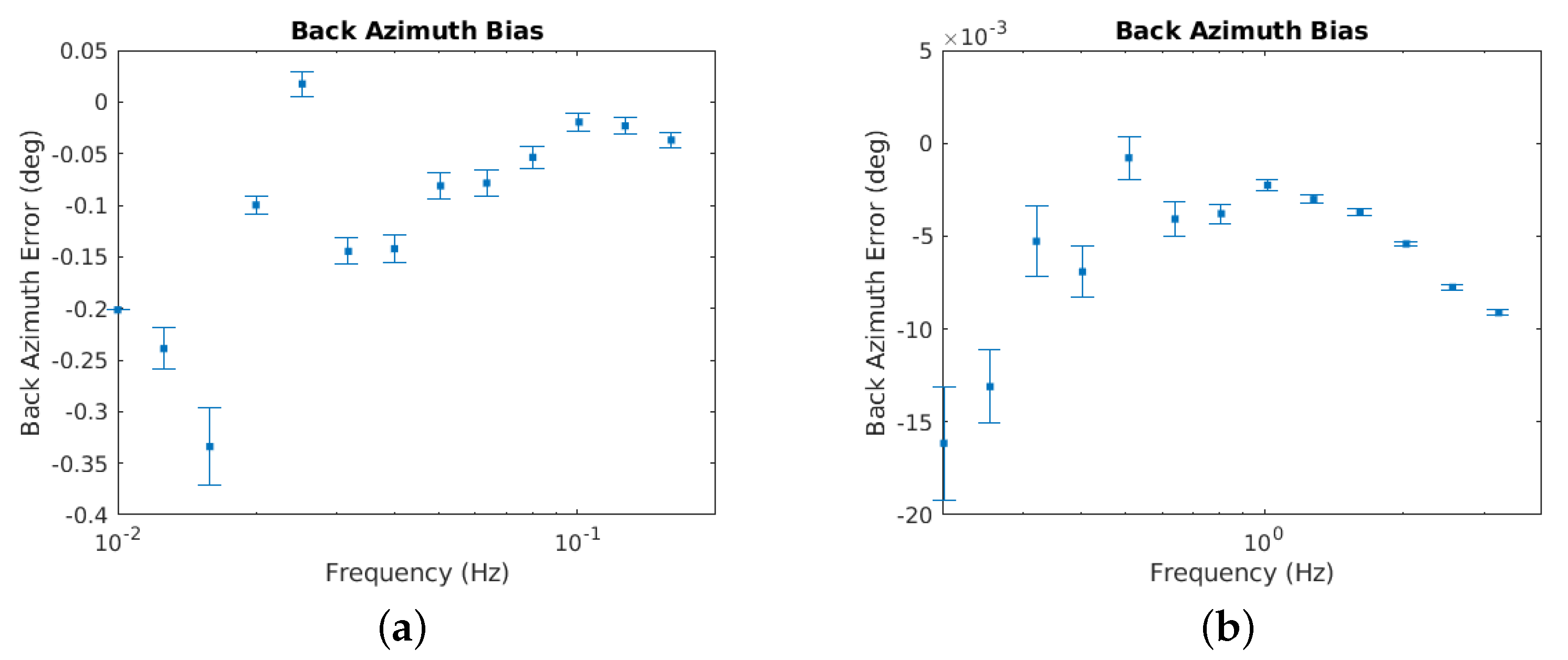
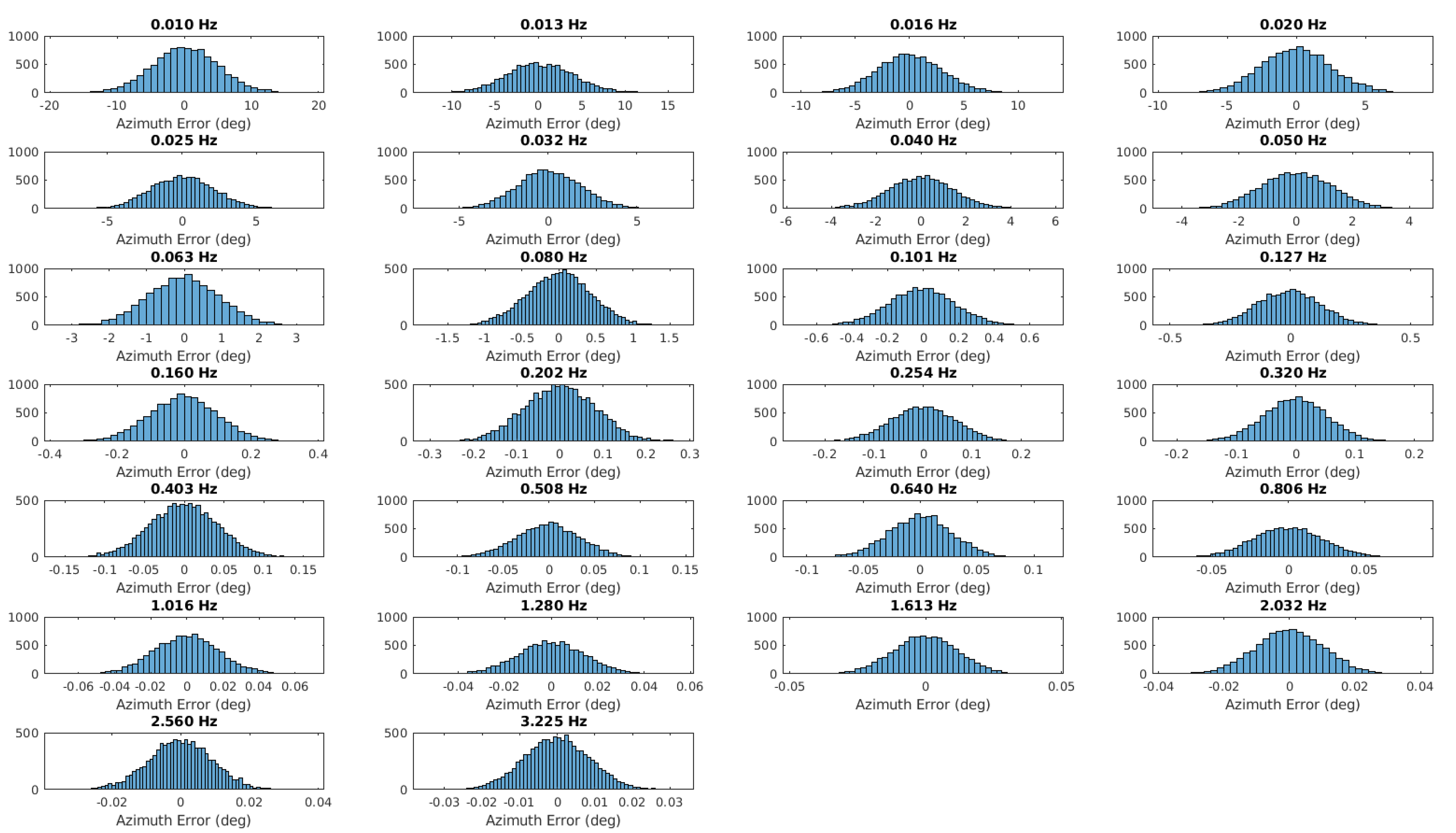
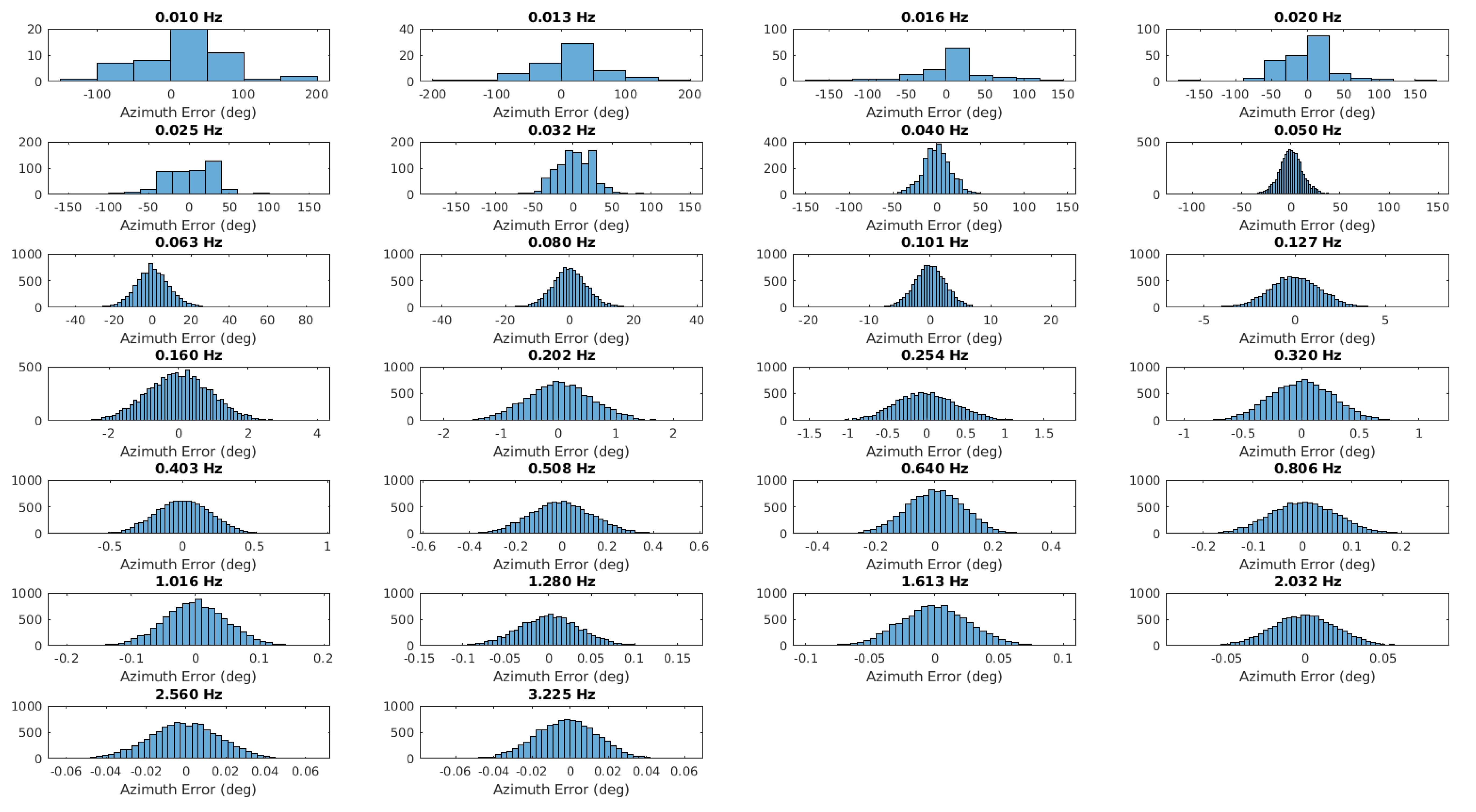
Appendix B.1. Back Azimuth

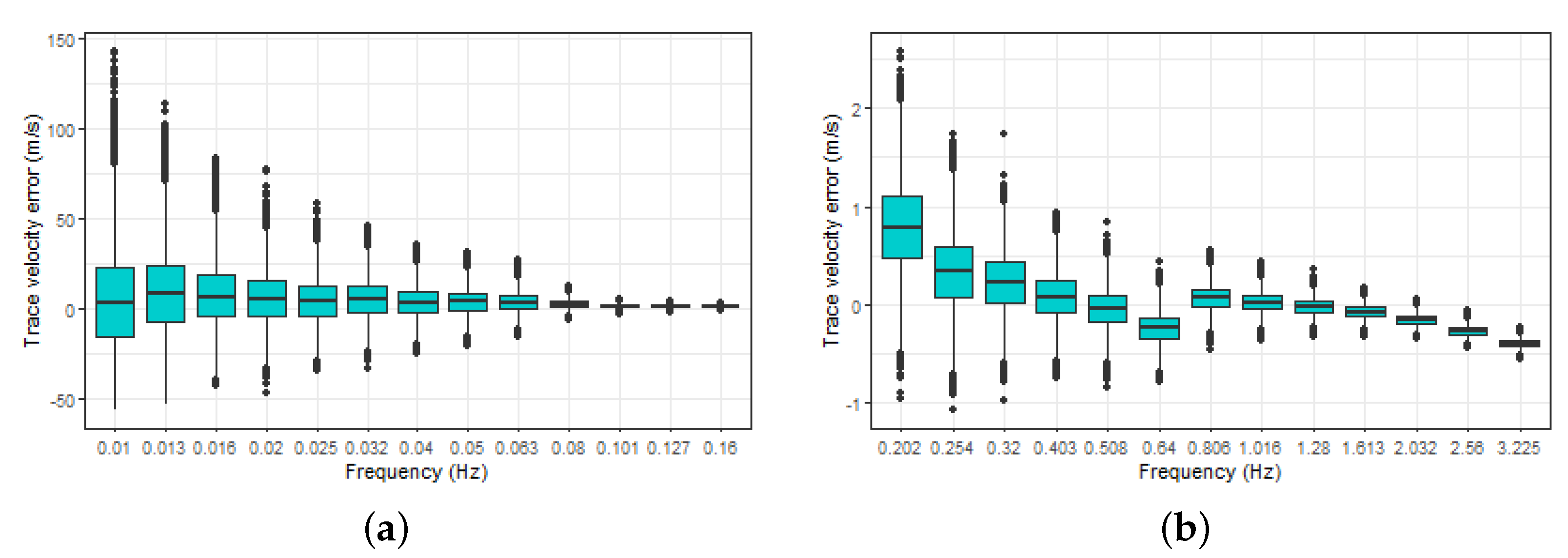
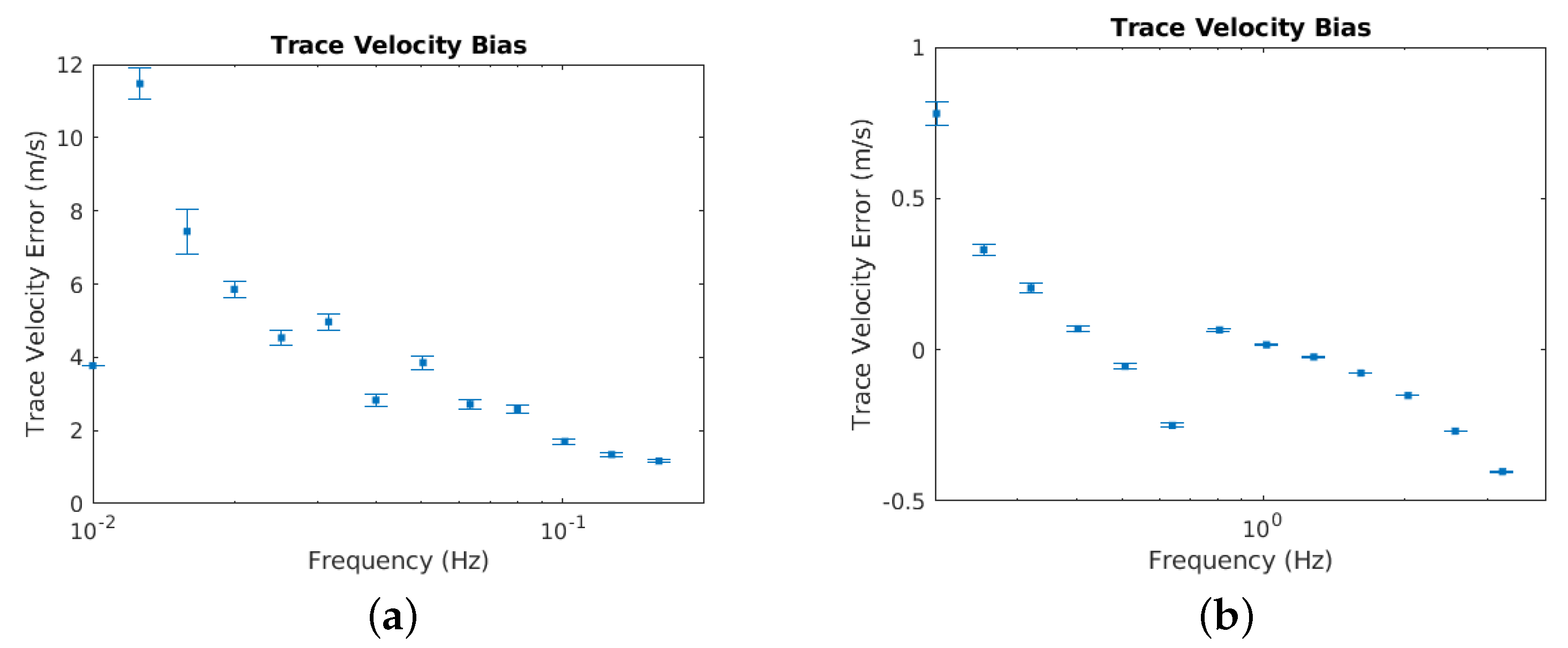
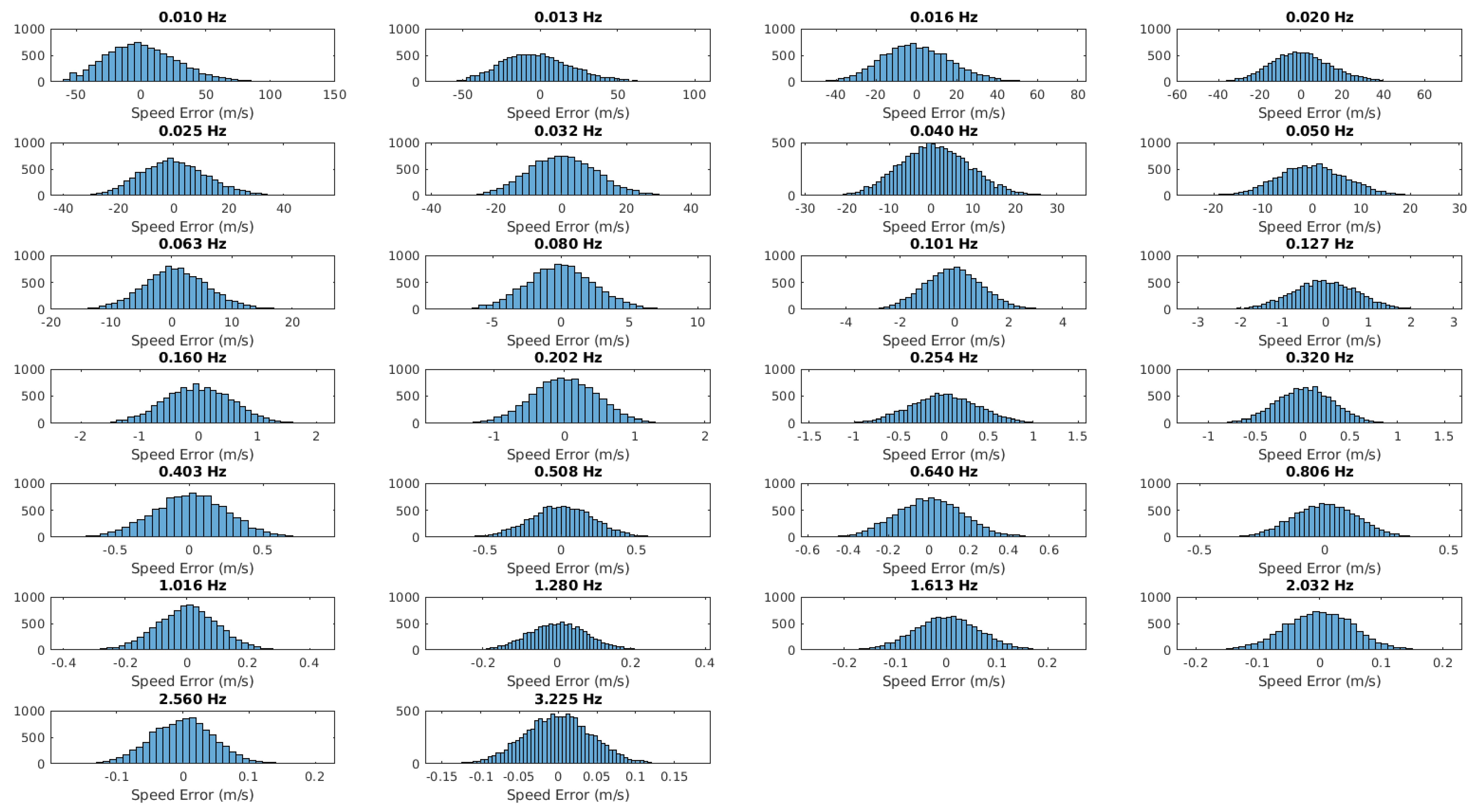
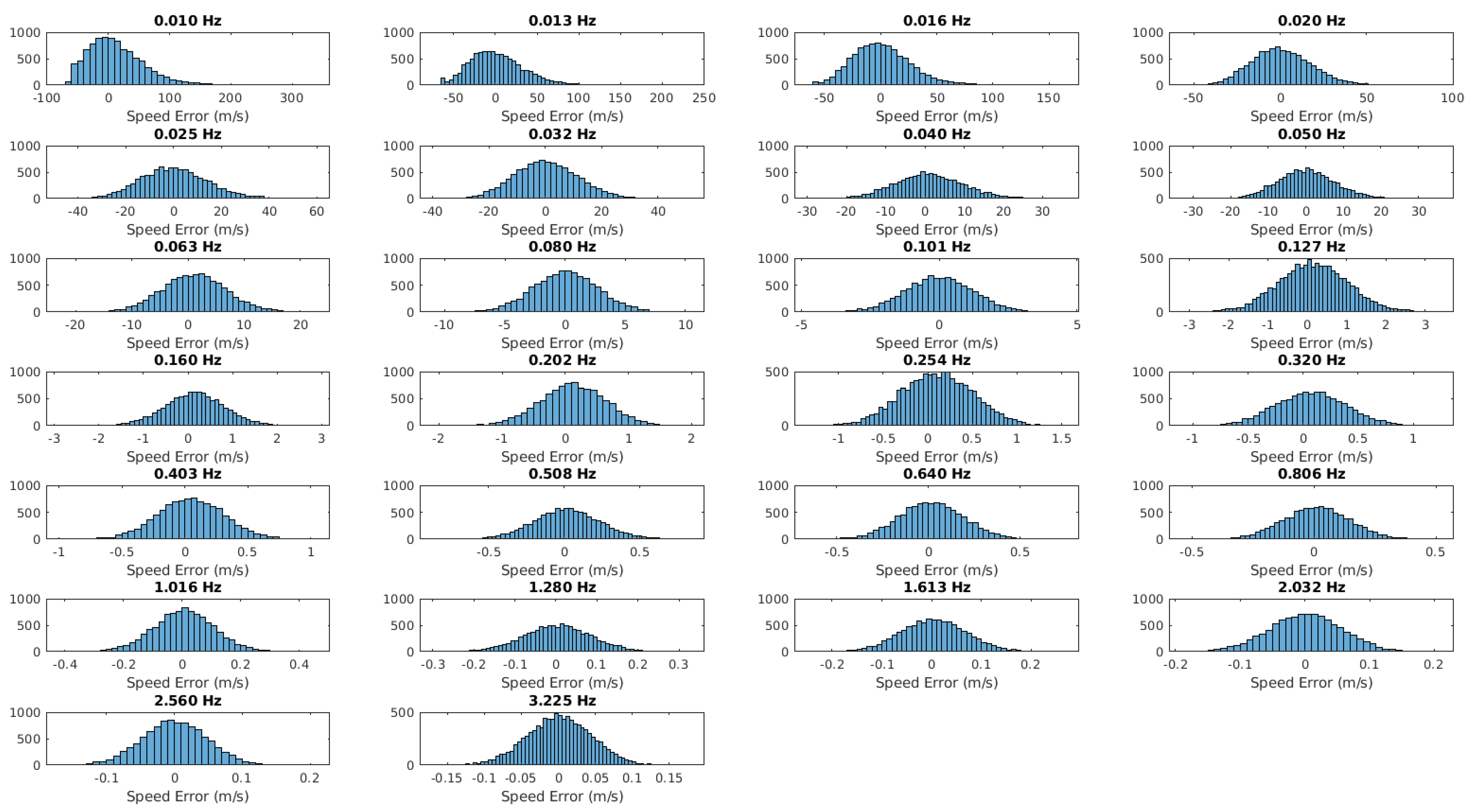
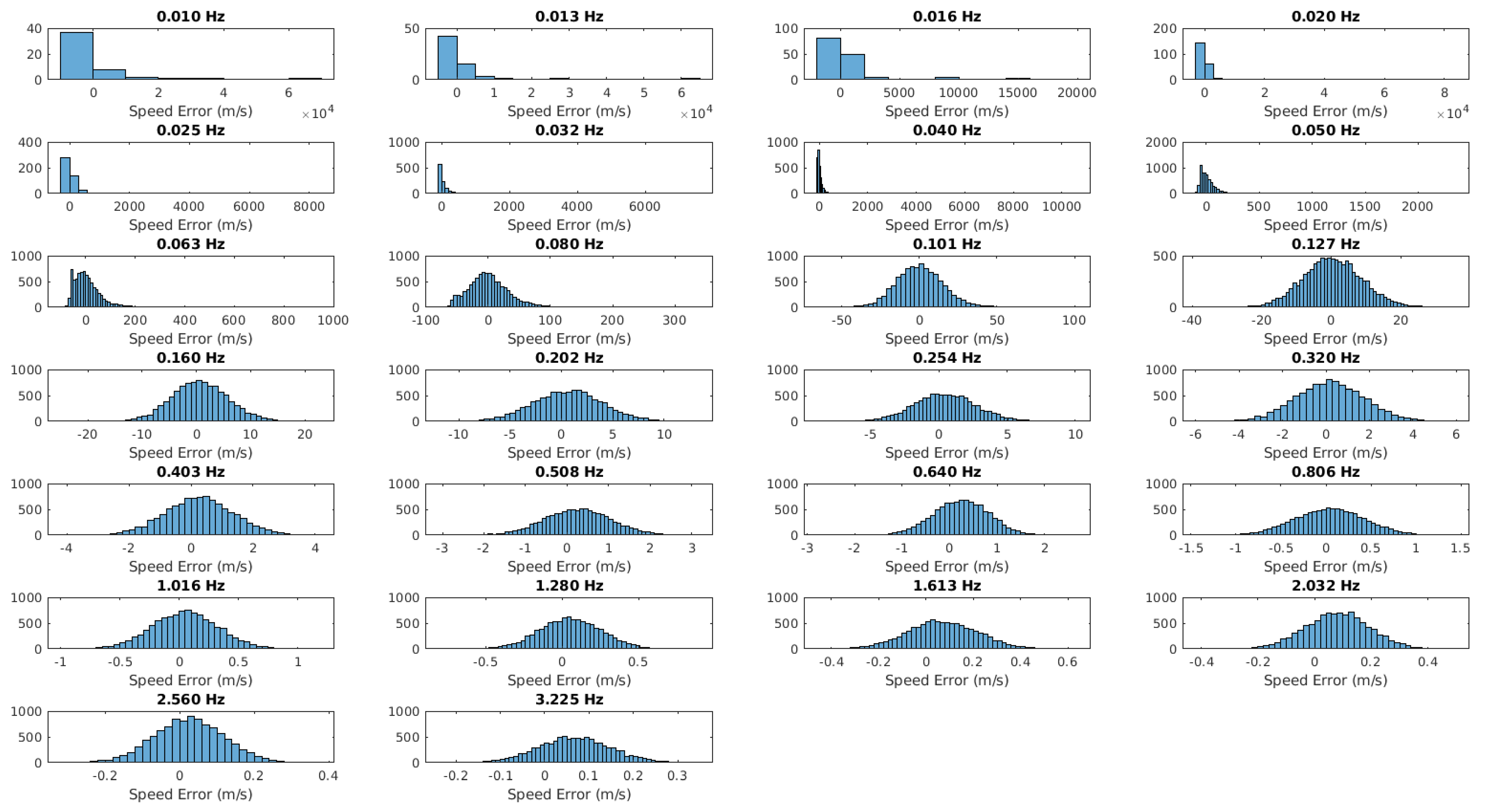
Appendix B.2. Trace Velocity

Appendix C. Results with SNR = 20 dB
Appendix C.1. Back Azimuth

Appendix C.2. Trace Velocity

Appendix D. Results with SNR = 0 dB
Appendix D.1. Back Azimuth

Appendix D.2. Trace Velocity

References
- Murayama, T.; Kanao, M.; Yamamoto, M.Y.; Ishihara, Y.; Matsushima, T.; Kakinami, Y. Infrasound array observations in the Lützow-Holm Bay region, East Antarctica. Polar Sci. 2015, 9, 35–50. [Google Scholar] [CrossRef]
- Evers, L.G.; Haak, H.W. The Characteristics of Infrasound, its Propagation and Some Early History. In Infrasound Monitoring for Atmospheric Studies; Le Pichon, A., Blanc, E., Hauchecorne, A., Eds.; Springer: Dordrecht, The Netherlands, 2009; pp. 3–27. [Google Scholar] [CrossRef]
- de Groot-Hedlin, C.; Hedlin, M. Detection of Infrasound Signals and Sources Using a Dense Seismic Network. In Infrasound Monitoring for Atmospheric Studies: Challenges in Middle Atmosphere Dynamics and Societal Benefits; Le Pichon, A., Blanc, E., Hauchecorne, A., Eds.; Springer International Publishing: Cham, Switzerland, 2019; pp. 669–700. [Google Scholar] [CrossRef]
- Waxler, R.; Assink, J. Propagation Modeling Through Realistic Atmosphere and Benchmarking. In Infrasound Monitoring for Atmospheric Studies: Challenges in Middle Atmosphere Dynamics and Societal Benefits; Le Pichon, A., Blanc, E., Hauchecorne, A., Eds.; Springer International Publishing: Cham, Switzerland, 2019; pp. 509–549. [Google Scholar] [CrossRef]
- Matoza, R.; Le Pichon, A.; Vergoz, J.; Herry, P.; Lalande, J.M.; Lee, H.i.; Che, I.Y.; Rybin, A. Infrasonic observations of the June 2009 Sarychev Peak eruption, Kuril Islands: Implications for infrasonic monitoring of remote explosive volcanism. J. Volcanol. Geotherm. Res. 2011, 200, 35–48. [Google Scholar] [CrossRef] [Green Version]
- Freret-Lorgeril, V.; Bonadonna, C.; Corradini, S.; Donnadieu, F.; Guerrieri, L.; Lacanna, G.; Marzano, F.S.; Mereu, L.; Merucci, L.; Ripepe, M.; et al. Examples of Multi-Sensor Determination of Eruptive Source Parameters of Explosive Events at Mount Etna. Remote Sens. 2021, 13, 2097. [Google Scholar] [CrossRef]
- De Angelis, S.; Diaz-Moreno, A.; Zuccarello, L. Recent Developments and Applications of Acoustic Infrasound to Monitor Volcanic Emissions. Remote Sens. 2019, 11, 1302. [Google Scholar] [CrossRef] [Green Version]
- Campus, P.; Christie, D.R. Worldwide Observations of Infrasonic Waves. In Infrasound Monitoring for Atmospheric Studies; Le Pichon, A., Blanc, E., Hauchecorne, A., Eds.; Springer: Dordrecht, The Netherlands, 2009; pp. 185–234. [Google Scholar] [CrossRef]
- Marty, J. The IMS Infrasound Network: Current Status and Technological Developments. In Infrasound Monitoring for Atmospheric Studies; Le Pichon, A., Blanc, E., Hauchecorne, A., Eds.; Springer: Cham, Switzerland, 2019; Chapter 1. [Google Scholar] [CrossRef]
- Hupe, P.; Ceranna, L.; Le Pichon, A.; Matoza, R.S.; Mialle, P. International Monitoring System infrasound data products for atmospheric studies and civilian applications. Earth Syst. Sci. Data Discuss. 2022, 2022, 1–40. [Google Scholar] [CrossRef]
- Brachet, N.; Brown, D.; Le Bras, R.; Cansi, Y.; Mialle, P.; Coyne, J. Monitoring the Earth’s Atmosphere with the Global IMS Infrasound Network. In Infrasound Monitoring for Atmospheric Studies; Le Pichon, A., Blanc, E., Hauchecorne, A., Eds.; Springer: Dordrecht, The Netherlands, 2009; pp. 77–118. [Google Scholar] [CrossRef]
- Cansi, Y. An automatic seismic event processing for detection and location: The P.M.C.C. Method. Geophys. Res. Lett. 1995, 22, 1021–1024. [Google Scholar] [CrossRef]
- Cansi, Y.; Klinger, Y. An automated data processing method for mini-arrays. News Lett 1997, 11. [Google Scholar]
- Cansi, Y.; Le Pichon, A. Infrasound Event Detection Using the Progressive Multi-Channel Correlation Algorithm. In Handbook of Signal Processing in Acoustics; Havelock, D., Kuwano, S., Vorländer, M., Eds.; Springer: New York, NY, USA, 2008; pp. 1425–1435. [Google Scholar] [CrossRef]
- Smart, E.; Flinn, E.A. Fast Frequency-Wavenumber Analysis and Fisher Signal Detection in Real-Time Infrasonic Array Data Processing. Geophys. J. Int. 1971, 26, 279–284. [Google Scholar] [CrossRef] [Green Version]
- Evers, L.G.; Haak, H.W. Listening to sounds from an exploding meteor and oceanic waves. Geophys. Res. Lett. 2001, 28, 41–44. [Google Scholar] [CrossRef]
- Poste, B.; Charbit, M.; Pichon, A.L.; Listowski, C.; Roueff, F.; Vergoz, J. The Multi-Channel Maximum-Likelihood (MCML) method: A new approach for infrasound detection and wave parameter estimation. In Proceedings of the EGU General Assembly, Vienna, Austria, 23–27 May 2022. [Google Scholar] [CrossRef]
- Charbit, M.; abed meraim, K.; Blanchet, G.; Le Pichon, A.; Cansi, Y. OLS vs. WLS for DOA Estimation Based on TDOA Estimates: Application to Infrasonic Signals. In Proceedings of the EGU General Assembly, Vienna, Austria, 23–27 May 2012; p. 7410. [Google Scholar]
- Castañeda, N.; Charbit, M.; Moulines, É. Source Localization from Quantized Time of Arrival Measurements. In Proceedings of the 2006 IEEE International Conference on Acoustics Speech and Signal Processing Proceedings, Toulouse, France, 14–19 May 2006; Volume 4, pp. 933–936. [Google Scholar]
- Szuberla, C.A.L.; Olson, J.V. Uncertainties associated with parameter estimation in atmospheric infrasound arrays. J. Acoust. Soc. Am. 2004, 115, 253–258. [Google Scholar] [CrossRef]
- Bishop, J.W.; Fee, D.; Szuberla, C.A.L. Improved infrasound array processing with robust estimators. Geophys. J. Int. 2020, 221, 2058–2074. [Google Scholar] [CrossRef]
- De Angelis, S.; Haney, M.; Lyons, J.; Wech, A.; Fee, D.; Díaz Moreno, A.; Zuccarello, L. Uncertainty in Detection of Volcanic Activity Using Infrasound Arrays: Examples From Mt. Etna, Italy. Front. Earth Sci. 2020, 8, 169. [Google Scholar] [CrossRef]
- Norris, D.; Gibson, R.; Bongiovanni, K. Numerical Methods to Model Infrasonic Propagation Through Realistic Specifications of the Atmosphere. In Infrasound Monitoring for Atmospheric Studies; Le Pichon, A., Blanc, E., Hauchecorne, A., Eds.; Springer: Dordrecht, The Netherlands, 2009; pp. 541–573. [Google Scholar] [CrossRef]
- Kulichkov, S. On the Prospects for Acoustic Sounding of the Fine Structure of the Middle Atmosphere. In Infrasound Monitoring for Atmospheric Studies; Le Pichon, A., Blanc, E., Hauchecorne, A., Eds.; Springer: Dordrecht, The Netherlands, 2009; pp. 511–540. [Google Scholar] [CrossRef]
- Wang, R.; Yi, X.; Yu, L.; Zhang, C.; Wang, T.; Zhang, X. Infrasound Source Localization of Distributed Stations Using Sparse Bayesian Learning and Bayesian Information Fusion. Remote Sens. 2022, 14, 3181. [Google Scholar] [CrossRef]
- Garcés, M.A.; Hansen, R.A.; Lindquist, K.G. Traveltimes for infrasonic waves propagating in a stratified atmosphere. Geophys. J. Int. 1998, 135, 255–263. [Google Scholar] [CrossRef] [Green Version]
- Assink, J.; Smets, P.; Marcillo, O.; Weemstra, C.; Lalande, J.M.; Waxler, R.; Evers, L. Advances in Infrasonic Remote Sensing Methods. In Infrasound Monitoring for Atmospheric Studies: Challenges in Middle Atmosphere Dynamics and Societal Benefits; Le Pichon, A., Blanc, E., Hauchecorne, A., Eds.; Springer International Publishing: Cham, Switzerland, 2019; pp. 605–632. [Google Scholar] [CrossRef]
- Kristoffersen, S.K.; Le Pichon, A.; Hupe, P.; Matoza, R.S. Updated global reference models of broadband coherent infrasound signals for atmospheric studies and civilian applications. Earth Space Sci. 2022, 9. [Google Scholar] [CrossRef]
- Walker, K.T.; Hedlin, M.A. A Review of Wind-Noise Reduction Methodologies. In Infrasound Monitoring for Atmospheric Studies; Le Pichon, A., Blanc, E., Hauchecorne, A., Eds.; Springer: Dordrecht, The Netherlands, 2009; pp. 141–182. [Google Scholar] [CrossRef]
- Alcoverro, B.; Le Pichon, A. Design and optimization of a noise reduction system for infrasonic measurements using elements with low acoustic impedance. J. Acoust. Soc. Am. 2005, 117, 1717–1727. [Google Scholar] [CrossRef]
- Gabrielson, T.B. In situ calibration of atmospheric-infrasound sensors including the effects of wind-noise-reduction pipe systems. J. Acoust. Soc. Am. 2011, 130, 1154–1163. [Google Scholar] [CrossRef]
- Raspet, R.; Abbott, J.P.; Webster, J.; Yu, J.; Talmadge, C.; Alberts II, K.; Collier, S.; Noble, J. New Systems for Wind Noise Reduction for Infrasonic Measurements. In Infrasound Monitoring for Atmospheric Studies: Challenges in Middle Atmosphere Dynamics and Societal Benefits; Le Pichon, A., Blanc, E., Hauchecorne, A., Eds.; Springer International Publishing: Cham, Switzerland, 2019; pp. 91–124. [Google Scholar] [CrossRef]
- Alcoverro, B. The Design and Performance of Infrasound Noise-Reducing Pipe Arrays. In Handbook of Signal Processing in Acoustics; Havelock, D., Kuwano, S., Vorländer, M., Eds.; Springer: New York, NY, USA, 2008; pp. 1473–1486. [Google Scholar] [CrossRef]
- Daniels, F.B. Noise-Reducing Line Microphone for Frequencies below 1 cps. J. Acoust. Soc. Am. 1959, 31, 529–531. [Google Scholar] [CrossRef]
- Christie, D.R.; Kennett, B.L.; Tarlowski, C. Advances in infrasound technology with application to nuclear explosion monitoring. In Proceedings of the 29th Monitoring Research Review: Ground-Based Nuclear Explosion Monitoring Technologies, Denver, CO, USA, 25–27 September 2007; Los Alamos National Laboratory: Los Alamos, NM, USA, 2007; pp. 825–835. [Google Scholar]
- Green, D.N.; Nippress, A.; Bowers, D.; Selby, N.D. Identifying suitable time periods for infrasound measurement system response estimation using across-array coherence. Geophys. J. Int. 2021, 226, 1159–1173. [Google Scholar] [CrossRef]
- Kim, T.S.; Hayward, C.; Stump, B. Local infrasound signals from the Tokachi-Oki earthquake. Geophys. Res. Lett. 2004, 31, 20. [Google Scholar] [CrossRef]
- Fee, D.; Macpherson, K.; Gabrielson, T. Characterizing Infrasound Station Frequency Response Using Large Earthquakes and Colocated Seismometers. Bull. Seismol. Soc. Am. 2023. [Google Scholar] [CrossRef]
- Wave, S. MB3a Analog Infrasound Sensor Datasheet. 2022. Available online: http://seismowave.com/wp-content/uploads/2019/07/datasheet-MB3a-V2022.2.pdf (accessed on 18 March 2023).
- Nief, G.; Talmadge, C.; Rothman, J.; Gabrielson, T. New Generations of Infrasound Sensors: Technological Developments and Calibration. In Infrasound Monitoring for Atmospheric Studies: Challenges in Middle Atmosphere Dynamics and Societal Benefits; Le Pichon, A., Blanc, E., Hauchecorne, A., Eds.; Springer International Publishing: Cham, Switzerland, 2019; pp. 63–89. [Google Scholar] [CrossRef]
- Esward, T.; Eichstädt, S.; Smith, I.; Bruns, T.; Davis, P.; Harris, P. Estimating dynamic mechanical quantities and their associated uncertainties: Application guidance. Metrologia 2019, 56, 015002. [Google Scholar] [CrossRef]
- Husebye, E.S. Direct measurement of dT/dΔ. Bull. Seismol. Soc. Am. 1969, 59, 717–727. [Google Scholar] [CrossRef]
- Mykkeltveit, S.; Ringdal, F.; Kværna, T.; Alewine, R.W. Application of regional arrays in seismic verification research. Bull. Seismol. Soc. Am. 1990, 80, 1777–1800. [Google Scholar] [CrossRef]
- Cansi, Y.; Plantet, J.L.; Massinon, B. Earthquake location applied to a mini-array: K-spectrum versus correlation method. Geophys. Res. Lett. 1993, 20, 1819–1822. [Google Scholar] [CrossRef]
- Runco, A.; Louthain, J.; Clauter, D. Optimizing the PMCC Algorithm for Infrasound and Seismic Nuclear Treaty Monitoring. Open J. Acoust. 2014, 04, 204–213. [Google Scholar] [CrossRef] [Green Version]
- Park, J.; Hayward, C.T.; Zeiler, C.P.; Arrowsmith, S.J.; Stump, B.W. Assessment of Infrasound Detectors Based on Analyst Review, Environmental Effects, and Detection Characteristics. Bull. Seismol. Soc. Am. 2017, 107, 674–690. [Google Scholar] [CrossRef]
- Robert, C.; Casella, G. Monte Carlo Statistical Methods; Springer Verlag: Berlin/Heidelberg, Germany, 2004. [Google Scholar]
- Rubinstein, R.; Kroese, D. Simulation and the Monte Carlo Method, 3rd ed.; Wiley Series in Probability and Statistics; Wiley: Hoboken, NJ, USA, 2016. [Google Scholar]
- ISO 16269-4:2010; Statistical Interpretation of Data—Part 4: Detection and Treatment of Outliers. ISO: Geneva, Switzerland, 2010.






















Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Demeyer, S.; Kristoffersen, S.K.; Le Pichon, A.; Larsonnier, F.; Fischer, N. Contribution to Uncertainty Propagation Associated with On-Site Calibration of Infrasound Monitoring Systems. Remote Sens. 2023, 15, 1892. https://doi.org/10.3390/rs15071892
Demeyer S, Kristoffersen SK, Le Pichon A, Larsonnier F, Fischer N. Contribution to Uncertainty Propagation Associated with On-Site Calibration of Infrasound Monitoring Systems. Remote Sensing. 2023; 15(7):1892. https://doi.org/10.3390/rs15071892
Chicago/Turabian StyleDemeyer, Séverine, Samuel K. Kristoffersen, Alexis Le Pichon, Franck Larsonnier, and Nicolas Fischer. 2023. "Contribution to Uncertainty Propagation Associated with On-Site Calibration of Infrasound Monitoring Systems" Remote Sensing 15, no. 7: 1892. https://doi.org/10.3390/rs15071892
APA StyleDemeyer, S., Kristoffersen, S. K., Le Pichon, A., Larsonnier, F., & Fischer, N. (2023). Contribution to Uncertainty Propagation Associated with On-Site Calibration of Infrasound Monitoring Systems. Remote Sensing, 15(7), 1892. https://doi.org/10.3390/rs15071892