
Quantitative Inversion Ability Analysis of Oil Film Thickness Using Bright Temperature Difference Based on Thermal Infrared Remote Sensing: A Ground-Based Simulation Experiment of Marine Oil Spill



Abstract
:1. Introduction
- In terms of OFT inversion, does the deep learning model have an advantage over the traditional regression fitting model, classical machine learning model, and ensemble learning model? An optimal OFT inversion model is determined through comparative analysis.
- What is the optimal time for OFT detection using thermal infrared in a day? Does it change with the seasons?
- For the 17 OFTs set in the experiment, how is the detection ability of thermal infrared remote sensing?
- At night, how is the OFT detection ability of thermal infrared?
2. Data and Methods
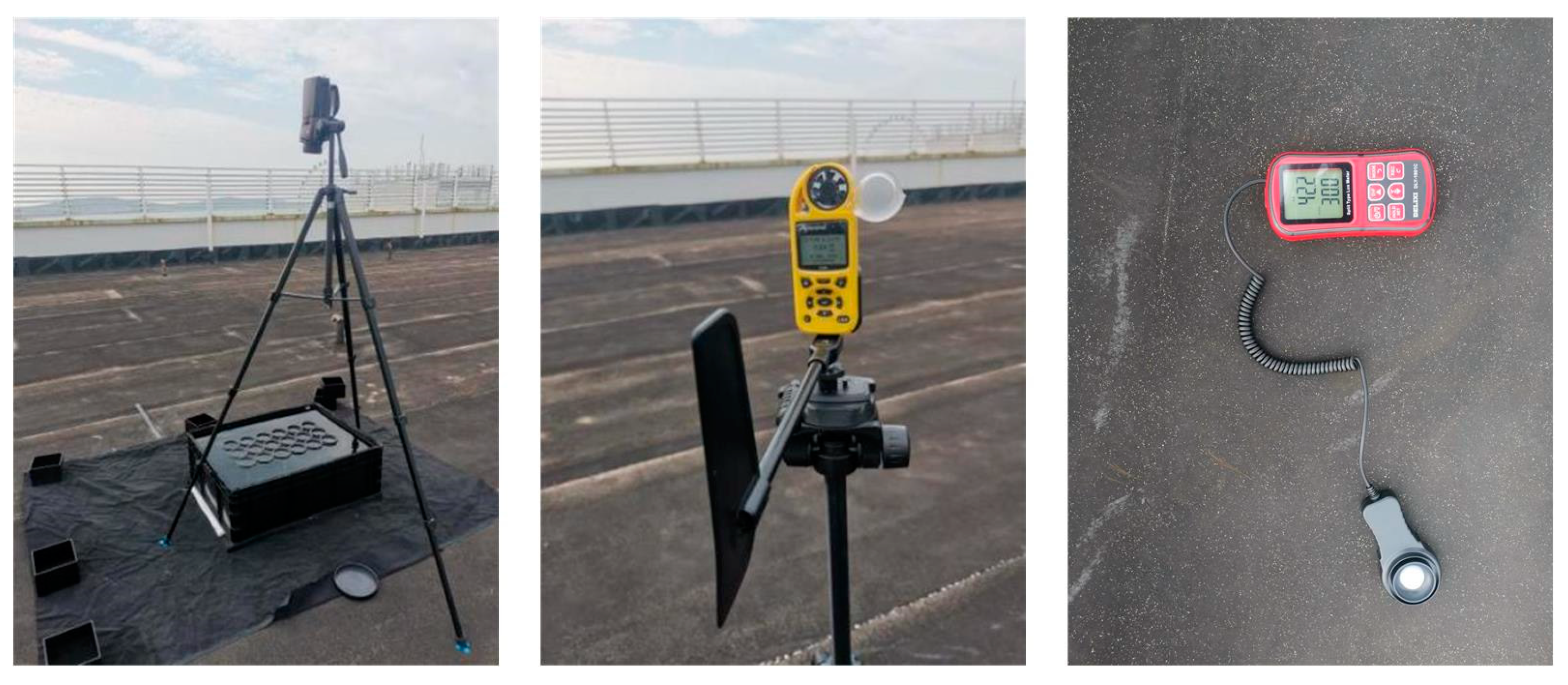
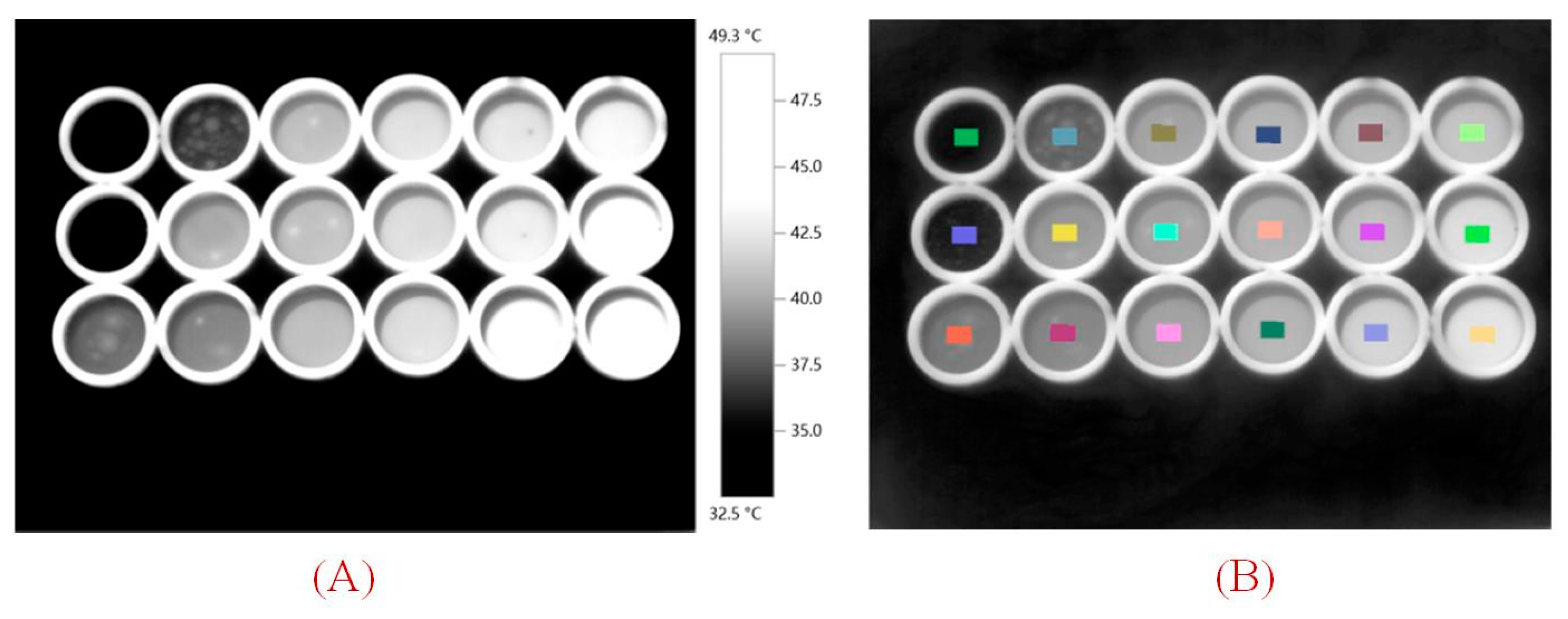
2.1. Data Acquisition and Processing
2.2. OFT Inversion and Accuracy Evaluation
2.2.1. Inversion Model Construction
2.2.2. Model Accuracy Evaluation Index
3. Results and Analysis
3.1. The Relationship between BTD and OFT
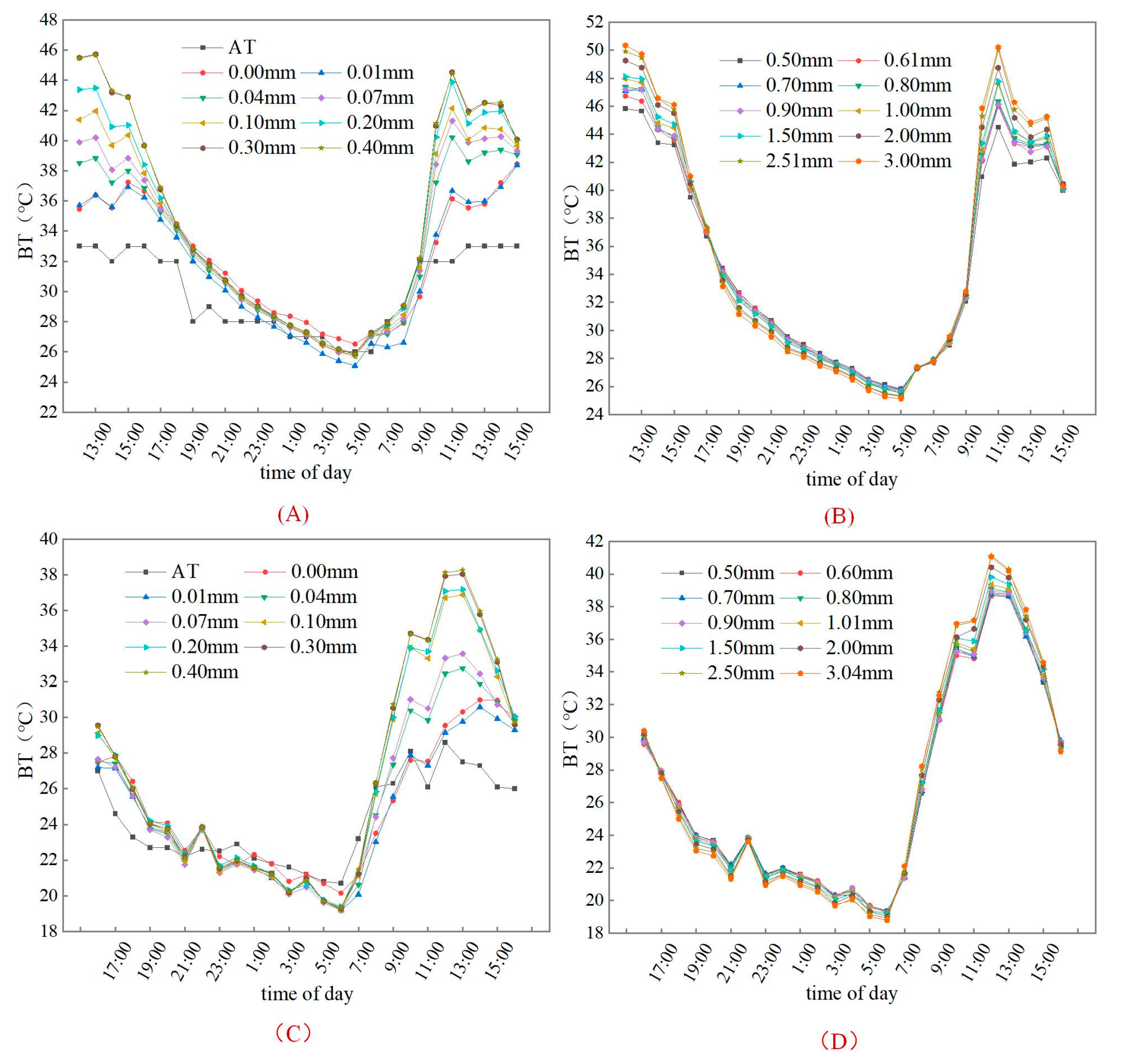
3.1.1. Variation of BTD of Oil Film with Different Thickness in a Day
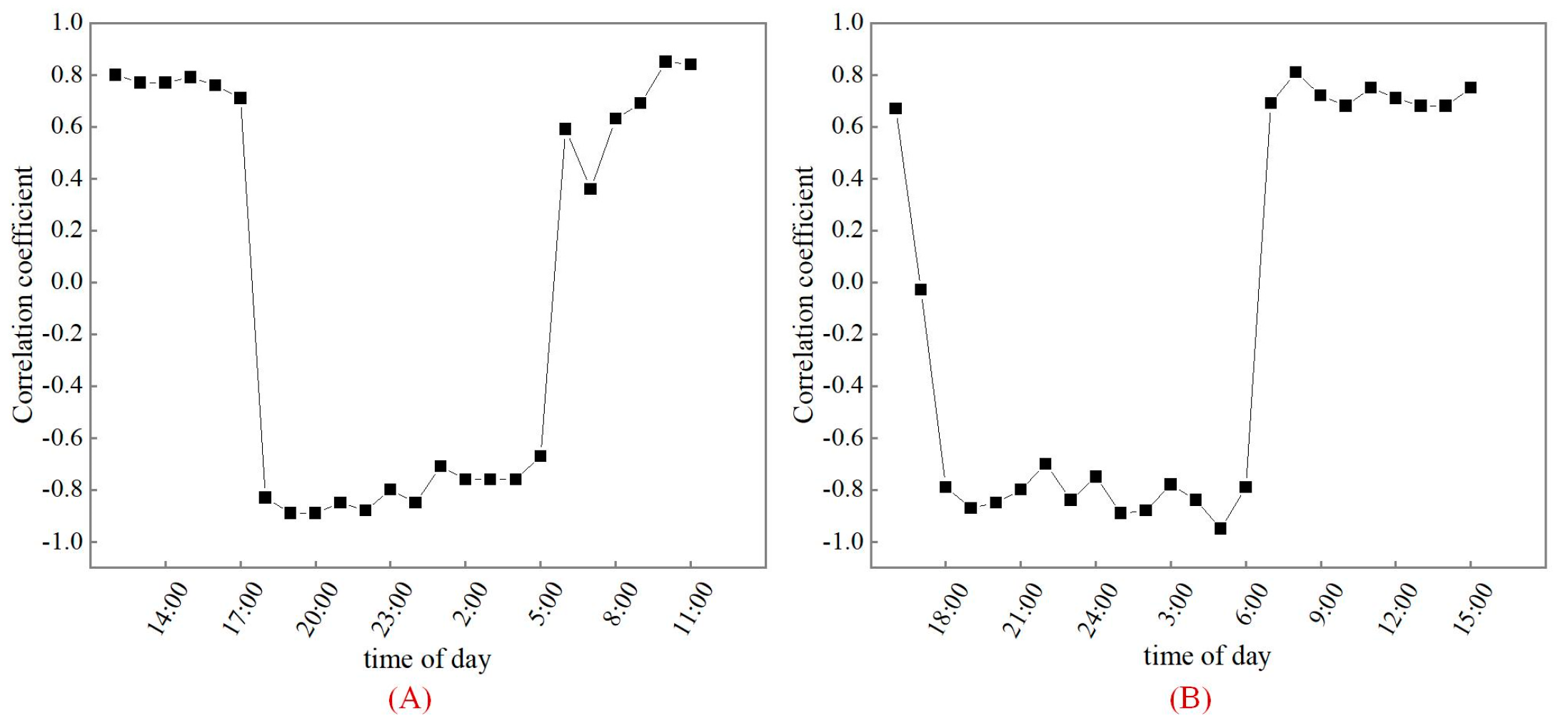
3.1.2. Correlation Analysis between OFT and BTD
3.2. Analysis of OFT Inversion Results
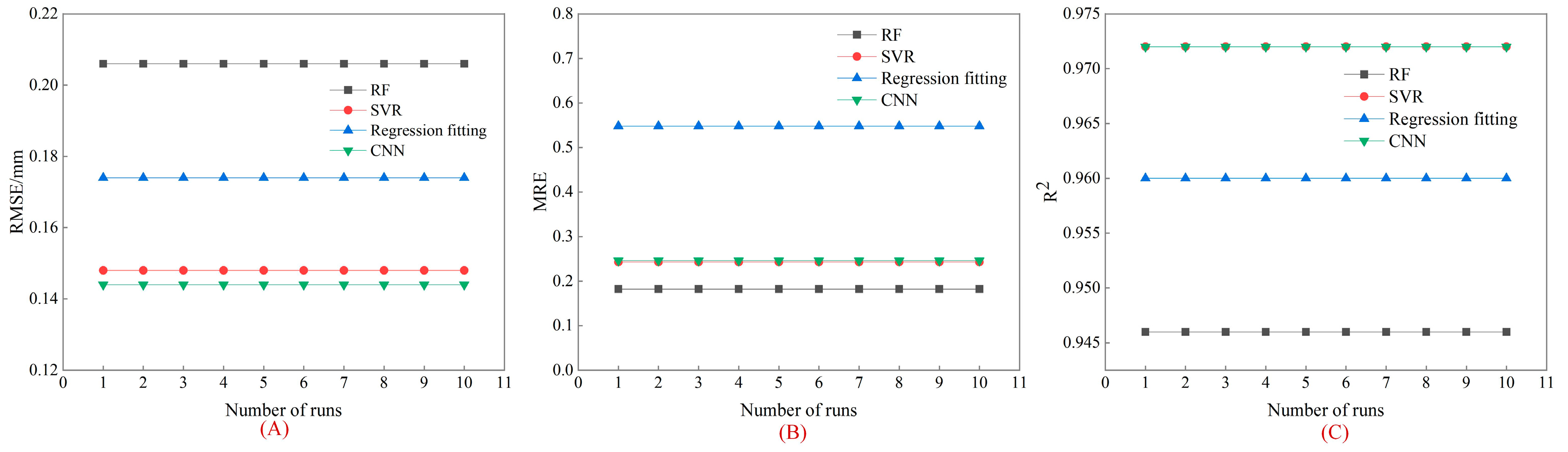
3.2.1. The Most Suitable Inversion Model
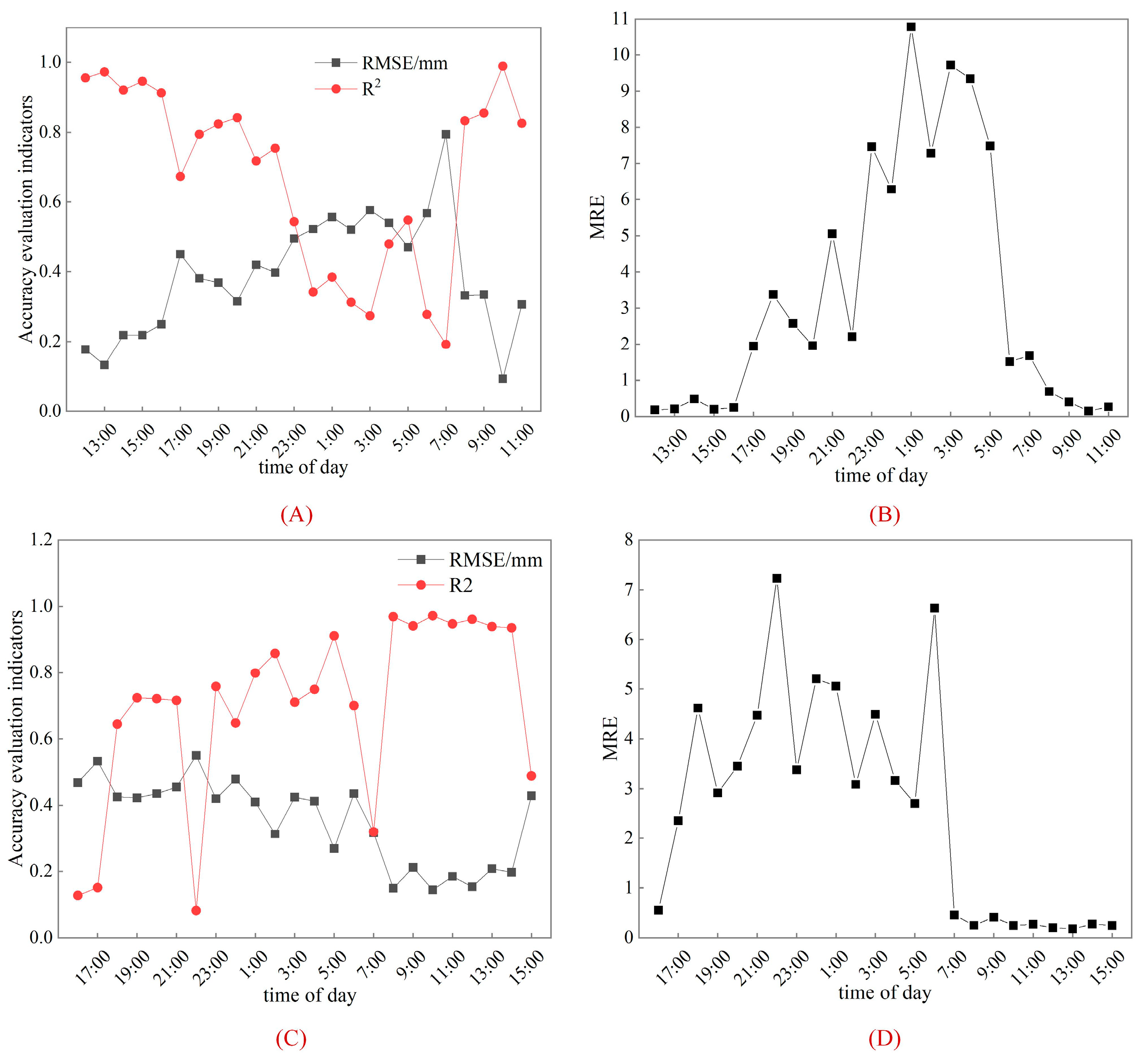
3.2.2. Optimal Detection Time of Day for OFT
4. Discussion
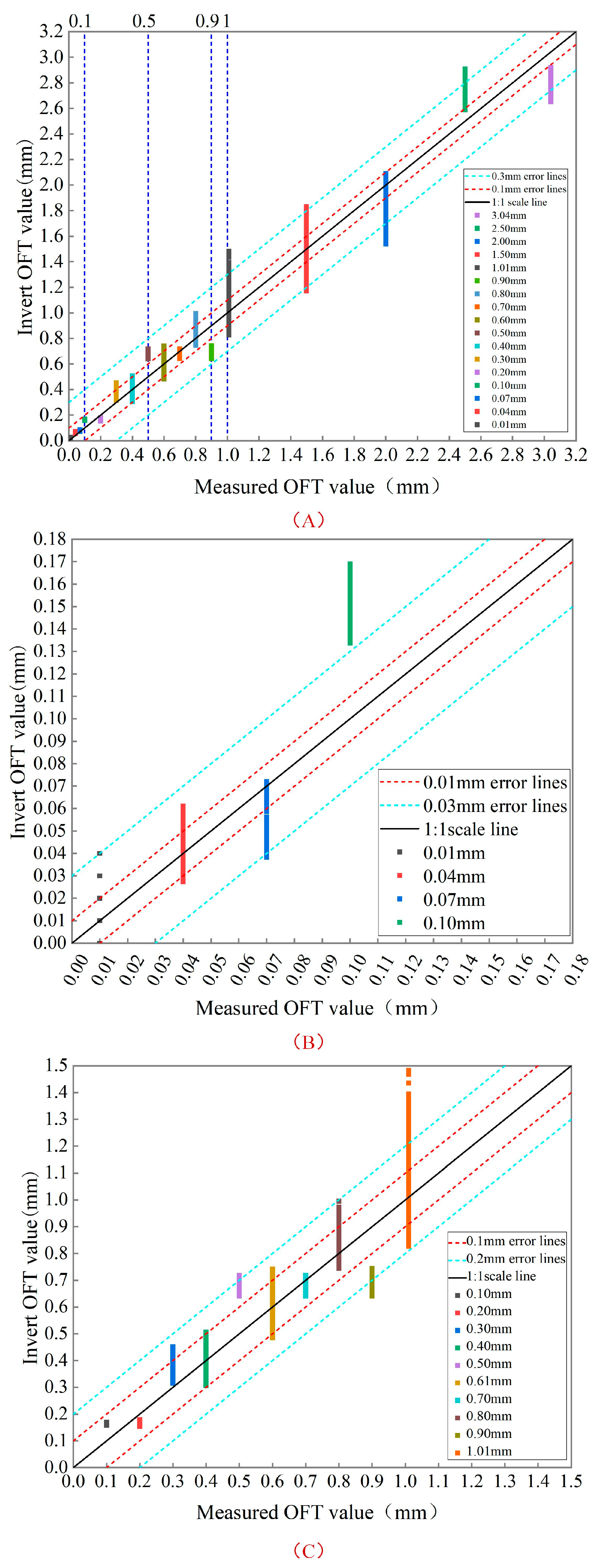
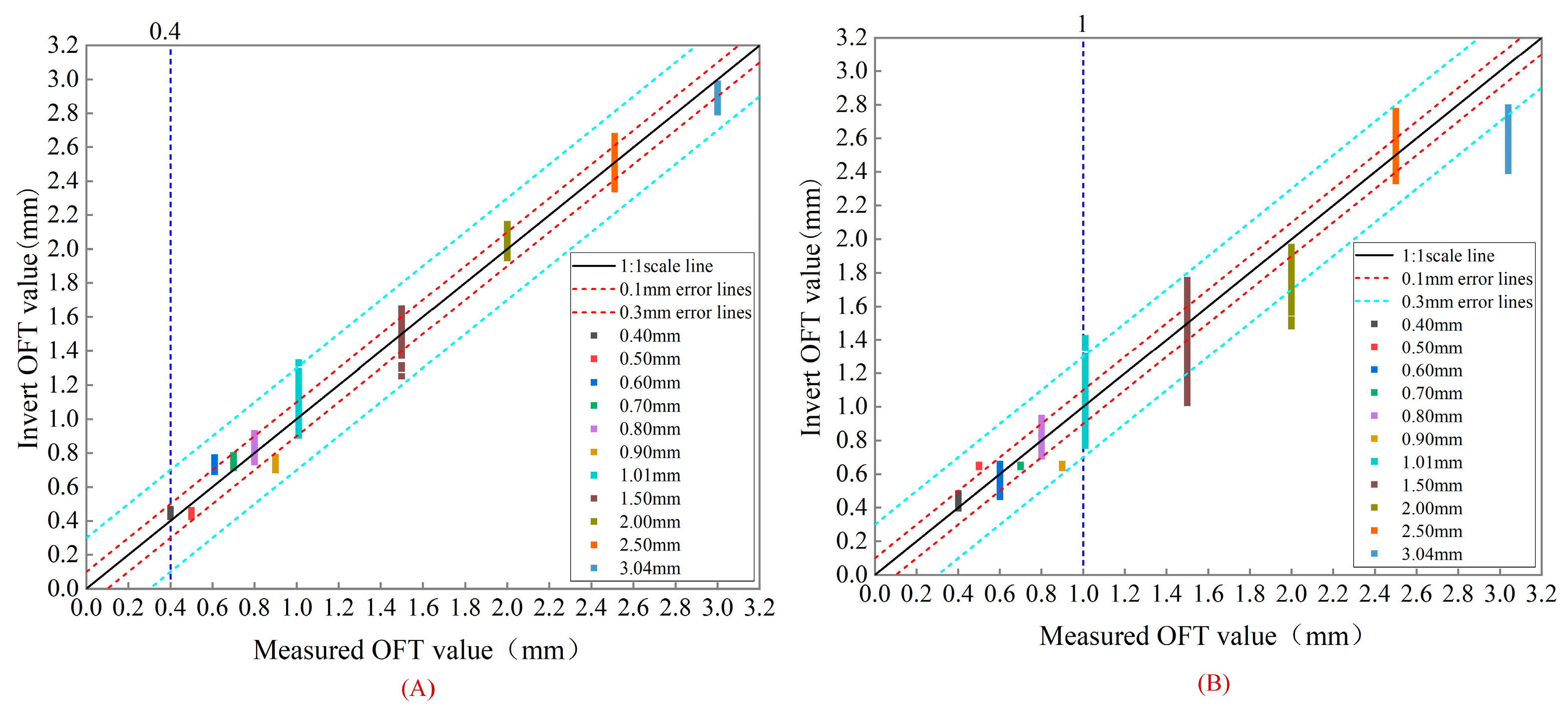
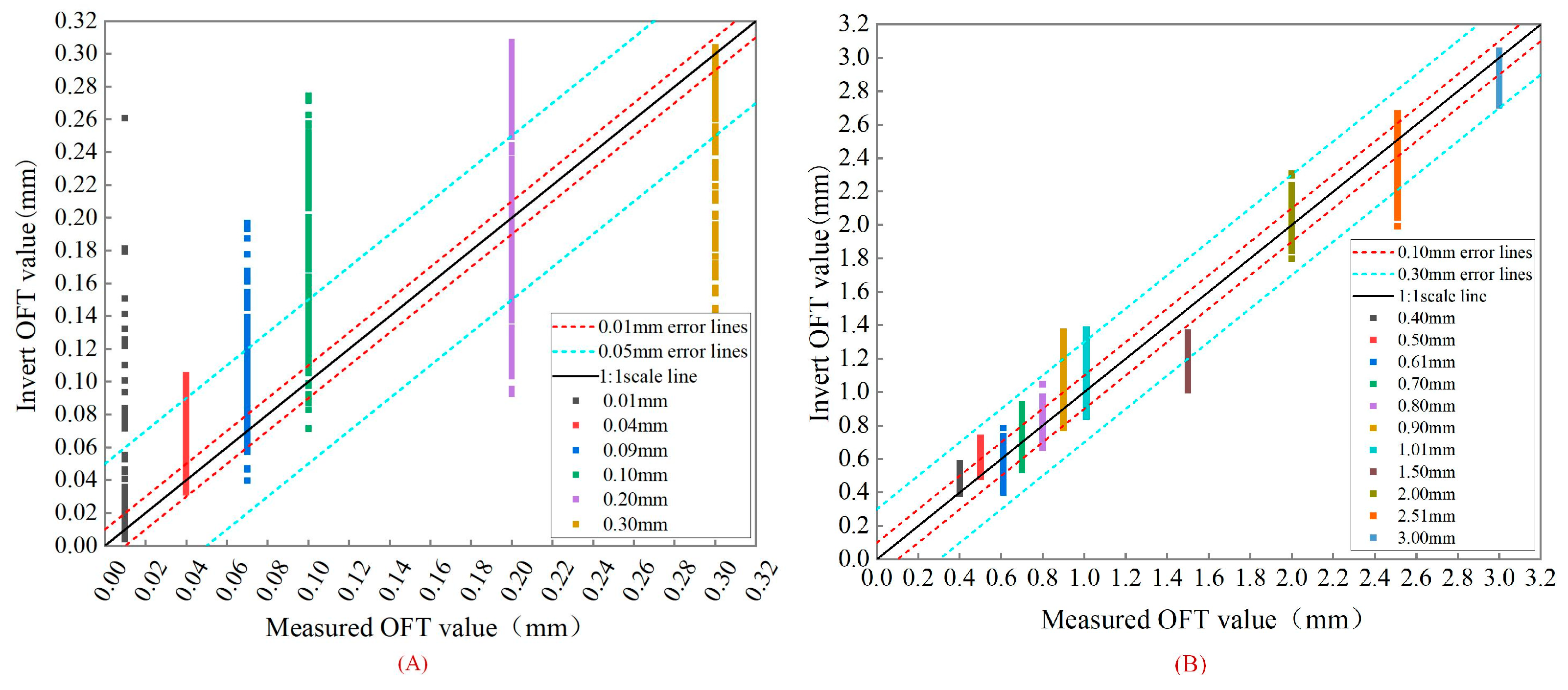
4.1. Detectable OFT Range Using Thermal Infrared Data
4.2. Oil Spill Amount Estimation under Simulated Oil Spill Scenarios
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Geng, B.; Zhou, W.; Lu, L.; Cao, Q.; Hong, M.; Wen, D. Risk assessment of offshore oil spill in the northern South China Sea: A stochastic scenario modeling approach. Front. Mar. Sci. 2022, 9, 86379. [Google Scholar] [CrossRef]
- Wang, W.; Sheng, H.; Chen, Y.; Liu, S.; Mao, J.; Zeng, Z.; Wan, J. A fast, edge-preserving, distance-regularized model with bilateral filtering for oil spill segmentation of SAR images. J. Oceanol. Limnol. 2021, 39, 1198–1210. [Google Scholar] [CrossRef]
- Leifer, I.; Lehr, W.J.; Simecek-Beatty, D.; Bradley, E.; Clark, R.; Dennison, P.; Hu, Y.; Matheson, S.; Jones, C.E.; Holt, B.; et al. State of the art satellite and airborne marine oil spill remote sensing: Application to the BP Deepwater Horizon oil spill. Remote Sens. Environ. 2012, 124, 185–209. [Google Scholar] [CrossRef] [Green Version]
- Zhao, D.; Tan, B.; Zhang, H.; Deng, R. Monitoring Marine Oil Spills in Hyperspectral and Multispectral Remote Sensing Data by the Spectral Gene Extraction (SGE) Method. Sustainability 2022, 14, 13696. [Google Scholar] [CrossRef]
- Yang, J.-F.; Wan, J.-H.; Ma, Y.; Zhang, J.; Hu, Y.-B.; Jiang, Z.-C. Oil Spill Hyperspectral Remote Sensing Detection Based on DCNN with Multi-Scale Features. J. Coast. Res. 2019, 90, 332–339. [Google Scholar] [CrossRef]
- Lu, Y.; Tian, Q.; Wang, X.; Zheng, G.; Li, X. Determining oil slick thickness using hyperspectral remote sensing in the Bohai Sea of China. Int. J. Digit. Earth 2013, 6, 76–93. [Google Scholar] [CrossRef]
- Hu, C.; Li, X.; Pichel, W.G.; Muller-Karger, F.E. Detection of natural oil slicks in the NWGulf of Mexico using MODIS imagery. Geophys. Res. Lett. 2009, 36, L01604. [Google Scholar] [CrossRef]
- Fingas, M. How to measure slick thickness (or not). In Proceedings of the Arctic Marine Oilspills Technical Seminar on Environmental Contamination and Response, Vancouver, BC, Canada, 20 June 2012; Volume 35, pp. 617–652. [Google Scholar]
- Brown, C.; Fingas, M.; Monchalin, J.; Neron, C.; Padioleau, C. Airborne measurement of oil slick thickness. In Proceedings of the Environment Canada Arctic and Marine Oil Spill Program Technical Seminar (AMOP) Proceedings, Ottawa, ON, Canada, 1 January 2006; Volume 29, pp. 911–919. [Google Scholar]
- Li, K.; Yu, H.; Xu, Y.; Luo, X. Detection of oil spills based on gray level co-occurrence matrix and support vector machine. Front. Environ. Sci. 2022, 10, 49880. [Google Scholar] [CrossRef]
- Macdonald, I.R.; Leifer, I.; Sassen, R.; Stine, P.; Mitchell, R.M.; Guinasso, N. Transfer of hydrocarbons from natural seeps to the water column and atmosphere. Geofluids 2010, 2, 95–107. [Google Scholar] [CrossRef]
- Jackson, C.; Alpers, W. The role of the critical angle in brightness reversals on sunglint images of the sea surface. J. Geophys. Res. Ocean. 2005, 115, C09019. [Google Scholar] [CrossRef]
- Brekke, C.; Solberg, A. Oil spill detection by satellite remote sensing. Remote Sens. Environ. 2005, 95, 1–13. [Google Scholar] [CrossRef]
- Fingas, M.; Brown, C. Review of oil spill remote sensing. Spill Sci. Technol. Bull. 1997, 4, 199–208. [Google Scholar] [CrossRef] [Green Version]
- Fingas, M.; Brown, C. Oil Spill Remote Sensing: A Review; Gulf Professional Publishing: Houston, TX, USA, 2011; Volume 6, pp. 111–169. [Google Scholar] [CrossRef]
- Solberg, A. Remote Sensing of Ocean Oil-Spill Pollution. Proc. IEEE 2012, 100, 2931–2945. [Google Scholar] [CrossRef]
- Senthil, J.; Murugan, V.; Forensics, P. AETC: Segmentation and classification of the oil spills from SAR imagery. Environ. Forensics 2017, 18, 258–271. [Google Scholar] [CrossRef]
- Skrunes, S.; Brekke, C.; Jones, C.E.; Espeseth, M.M.; Holt, B. Effect of wind direction and incidence angle on polarimetric SAR observations of slicked and unslicked sea surfaces. Remote Sens. Environ. 2018, 213, 73–91. [Google Scholar] [CrossRef]
- Hu, C.; Li, X.; Pichel, W. Detection of oil slicks using MODIS and SAR imagery. In Handbook of Satellite Remote Sensing Image Interpretation: Applications for Marine Living Resources Conservation and Management; EU PRESPO and IOCCG: Dartmouth, NS, Canada, 2011; pp. 21–34. [Google Scholar]
- Garcia-Pineda, O.; Staples, G.; Jones, C.E.; Hu, C.; Holt, B.; Kourafalou, V.; Graettinger, G.; DiPinto, L.; Ramirez, E.; Streett, D.; et al. Classification of oil spill by thicknesses using multiple remote sensors. Remote Sens. Environ. 2020, 236, 111421. [Google Scholar] [CrossRef]
- Garcia-Pineda, O.; Macdonald, I.; Hu, C.; Svejkovsky, J.; Hess, M.; Dukhovskoy, D.; Morey, S. Detection of floating oil anomalies from the deep water horizon oil spill with synthetic aperture radar. Oceanography 2013, 26, 124–137. [Google Scholar] [CrossRef] [Green Version]
- Keramitsoglou, I.; Cartalis, C.; Kiranoudis, C. Automatic identification of oil spills on satellite images. Environ. Model. Softw. 2006, 21, 640–652. [Google Scholar] [CrossRef]
- Yan, T.; Chen, X.; Zhang, T.; Yu, J.; Jiang, X.; Hu, W.; Jiao, F. A magnetic pH-induced textile fabric with switchable wettability for intelligent oil/water separation. Chem. Eng. J. 2018, 347, 52–63. [Google Scholar] [CrossRef] [Green Version]
- Sweet, L.E.; Magnuson, J.; Garner, T.R.; Alloy, M.M.; Stieglitz, J.D.; Benetti, D.; Grosell, M.; Roberts, A.P. Exposure to ultraviolet radiation late in development increases the toxicity of oil to mahi-mahi (Coryphaena hippurus) embryos. Environ. Toxicol. Chem. 2017, 36, 1592–1598. [Google Scholar] [CrossRef]
- Suo, Z.; Lu, Y.; Liu, J.; Ding, J.; Yin, D.; Xu, F.; Jiao, J. Ultraviolet remote sensing of marine oil spills: A new approach of Haiyang-1C satellite. Opt. Express 2021, 29, 13486–13495. [Google Scholar] [CrossRef] [PubMed]
- Li, W.; Guo, Q.; Jakubowski, M.K.; Kelly, M. Advances in application of space hyperspectral remote sensing(invited). Infrared Laser Eng. 2019, 48, 303001. [Google Scholar] [CrossRef] [Green Version]
- Zhong, H.; Lin, W.; Liu, H.; Ma, N.; Liu, K.; Cao, R.; Wang, T.; Ren, Z. Identification of tree species based on the fusion of UAV hyperspectral image and LiDAR data in a coniferous and broad-leaved mixed forest in Northeast China. Front. Plant Sci. 2022, 13, 964769. [Google Scholar] [CrossRef] [PubMed]
- Cui, C.; Li, Y.; Liu, B.; Li, G. A New Endmember Preprocessing Method for the Hyperspectral Unmixing of Imagery Containing Marine Oil Spills. ISPRS Int. J. Geo-Inf. 2017, 6, 286. [Google Scholar] [CrossRef] [Green Version]
- Hu, C.; Muller-Karger, F.; Taylor, C.; Myhre, D.; Murch, B.; Odriozola, A.L.; Godoy, G. MODIS detects oil spills in Lake Maracaibo, Venezuela. Eos Trans. Am. Geophys. Union 2003, 84, 313–319. [Google Scholar] [CrossRef]
- Lu, Y.; Li, X.; Tian, Q.; Zheng, G.; Sun, S.; Liu, Y.; Yang, Q. Progress in Marine Oil Spill Optical Remote Sensing: Detected Targets, Spectral Response Characteristics, and Theories. Mar. Geod. 2013, 36, 334–346. [Google Scholar] [CrossRef]
- Sun, S.; Hu, C. Sun glint requirement for the remote detection of surface oil films. Geophys. Res. Lett. 2016, 43, 309–316. [Google Scholar] [CrossRef]
- De Carolis, G.; Adamo, M.; Pasquariello, G. On the Estimation of Thickness of Marine Oil Slicks From Sun-Glittered, Near-Infrared MERIS and MODIS Imagery: The Lebanon Oil Spill Case Study. IEEE Trans. Geosci. Remote Sens. 2013, 52, 559–573. [Google Scholar] [CrossRef]
- Lu, Y.; Zhan, W.; Hu, C. Detecting and quantifying oil slick thickness by thermal remote sensing: A ground-based experiment. Remote Sens. Environ. 2016, 181, 207–217. [Google Scholar] [CrossRef]
- Jiao, J.; Lu, Y.; Hu, C.; Shi, J.; Sun, S.; Liu, Y. Quantifying ocean surface oil thickness using thermal remote sensing. Remote Sens. Environ. 2021, 261, 112513. [Google Scholar] [CrossRef]
- Zhou, Y.; Jiang, L.; Lu, Y.; Zhan, W.; Mao, Z.; Qian, W.; Liu, W. Thermal Infrared Contrast Between Different Types of Oil Slicks on Top of Water Bodies. IEEE Geosci. Remote Sens. Lett. 2017, 14, 1042–1045. [Google Scholar] [CrossRef]
- Liaw, A.; Wiener, M. Classification and Regression by RandomForest. R News 2002, 2, 18–22. [Google Scholar]
- Basak, D.; Srimanta, P.; Patranabis, D. Support Vector Regression. Comput. Sci. 2007, 11, 10. [Google Scholar]
- Lee, Y.; Hsieh, W.; Huang, C. e-SSVR: A Smooth Support Vector Machine for e-Insensitive Regression. IEEE Trans. Knowl. Data Eng. 2005, 17, 678–685. [Google Scholar] [CrossRef]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Number | OFT Setting (Summer)/mm | OFT Setting (Autumn)/mm | Number | OFT Setting (Summer)/mm | OFT Setting (Autumn)/mm |
|---|---|---|---|---|---|
| 1 | 0.00 | 0.00 | 10 | 0.61 | 0.60 |
| 2 | 0.01 | 0.01 | 11 | 0.70 | 0.70 |
| 3 | 0.04 | 0.04 | 12 | 0.80 | 0.80 |
| 4 | 0.07 | 0.07 | 13 | 0.90 | 0.90 |
| 5 | 0.10 | 0.10 | 14 | 1.01 | 1.01 |
| 6 | 0.20 | 0.20 | 15 | 1.50 | 1.50 |
| 7 | 0.30 | 0.30 | 16 | 2.00 | 2.00 |
| 8 | 0.40 | 0.40 | 17 | 2.51 | 2.50 |
| 9 | 0.50 | 0.50 | 18 | 3.00 | 3.04 |
| OFT | Accuracy Evaluation Indicators | Summer | Autumn | |||||||
|---|---|---|---|---|---|---|---|---|---|---|
| Model | Regression Fitting | RF | SVR | CNN | Regression Fitting | RF | SVR | CNN | ||
| 0.01–0.07 mm | RMSE/mm | 0.085 | 0.011 | 0.019 | 0.010 | 0.059 | 0.006 | 0.013 | 0.006 | |
| MRE | 5.079 | 0.063 | 0.462 | 0.251 | 2.040 | 0.019 | 0.506 | 0.204 | ||
| R2 | −11.037 | 0.792 | 0.430 | 0.866 | −4.768 | 0.941 | 0.681 | 0.896 | ||
| 0.10–1.00 mm | RMSE/mm | 0.095 | 0.136 | 0.104 | 0.094 | 0.143 | 0.175 | 0.125 | 0.113 | |
| MRE | 0.241 | 0.169 | 0.174 | 0.153 | 0.279 | 0.265 | 0.239 | 0.201 | ||
| R2 | 0.893 | 0.749 | 0.854 | 0.860 | 0.755 | 0.615 | 0.801 | 0.818 | ||
| 1.00–3.00 mm | RMSE/mm | 0.142 | 0.083 | 0.132 | 0.105 | 0.249 | 0.290 | 0.208 | 0.206 | |
| MRE | 0.056 | 0.011 | 0.047 | 0.042 | 0.100 | 0.091 | 0.088 | 0.095 | ||
| R2 | 0.959 | 0.983 | 0.955 | 0.973 | 0.879 | 0.823 | 0.909 | 0.906 | ||
| 0.01–3.00 mm | RMSE/mm | 0.112 | 0.111 | 0.109 | 0.093 | 0.174 | 0.206 | 0.148 | 0.144 | |
| MRE | 1.054 | 0.105 | 0.169 | 0.150 | 0.548 | 0.182 | 0.243 | 0.246 | ||
| R2 | 0.983 | 0.985 | 0.985 | 0.989 | 0.960 | 0.946 | 0.972 | 0.972 | ||
| Season | RMSE/mm | MRE | R2 |
|---|---|---|---|
| summer | 0.099 | 0.090 | 0.986 |
| autumn | 0.162 | 0.117 | 0.962 |
| OFT Range | RMSE/mm | MRE | R2 |
|---|---|---|---|
| 0.01–3.00 mm | 0.330 | 0.169 | 0.859 |
| 0.01–0.30 mm | 0.069 | 0.557 | 0.535 |
| 0.40–3.00 mm | 0.161 | 0.105 | 0.963 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, M.; Yang, J.; Liu, S.; Zhang, J.; Ma, Y.; Wan, J. Quantitative Inversion Ability Analysis of Oil Film Thickness Using Bright Temperature Difference Based on Thermal Infrared Remote Sensing: A Ground-Based Simulation Experiment of Marine Oil Spill. Remote Sens. 2023, 15, 2018. https://doi.org/10.3390/rs15082018
Wang M, Yang J, Liu S, Zhang J, Ma Y, Wan J. Quantitative Inversion Ability Analysis of Oil Film Thickness Using Bright Temperature Difference Based on Thermal Infrared Remote Sensing: A Ground-Based Simulation Experiment of Marine Oil Spill. Remote Sensing. 2023; 15(8):2018. https://doi.org/10.3390/rs15082018
Chicago/Turabian StyleWang, Meiqi, Junfang Yang, Shanwei Liu, Jie Zhang, Yi Ma, and Jianhua Wan. 2023. "Quantitative Inversion Ability Analysis of Oil Film Thickness Using Bright Temperature Difference Based on Thermal Infrared Remote Sensing: A Ground-Based Simulation Experiment of Marine Oil Spill" Remote Sensing 15, no. 8: 2018. https://doi.org/10.3390/rs15082018
APA StyleWang, M., Yang, J., Liu, S., Zhang, J., Ma, Y., & Wan, J. (2023). Quantitative Inversion Ability Analysis of Oil Film Thickness Using Bright Temperature Difference Based on Thermal Infrared Remote Sensing: A Ground-Based Simulation Experiment of Marine Oil Spill. Remote Sensing, 15(8), 2018. https://doi.org/10.3390/rs15082018