1. Introduction
Source depth discrimination in shallow water has significant research value, aiming to distinguish surface sources from submerged ones rather than calculating depth. The distinction between these two classes of sources is based on their respective mode spectrum excitation patterns. It exploits the difference in energies of low-order normal modes (also known as trapped modes [
1], TMs) and high-order normal modes (non–trapped modes, NTMs), since the surface source cannot excite TMs due to their evanescent mode amplitudes near the surface [
2]. In contrast, a submerged source can excite both TMs and NTMs.
Publications have explicitly used the numerical representation of the energy difference for source depth discrimination. A horizontal line array (HLA) at the endfire was utilized to build the mode subspace projections and estimate the energy ratio between these two groups of modes for discrimination [
1], requiring the inputs of an approximate sound speed profile, water depth, and bottom type. Mode filtering was also used to build the trapped energy ratio with an HLA close to the endfire [
3]. This demands prior knowledge of the mode characteristics, which cannot be precisely obtained, due to the uncertainty in the acoustic model or the environmental mismatch.
The application of the waveguide invariant
[
4] in depth discrimination implicitly exploits the aforementioned difference, which suggests whether the source is near the surface or submerged, depending on its value. The invariance quantifies the orientation of the intensity striations caused by modal interferences in the frequency–range (
) plane. It is found that, for a surface source, the distribution of the
peaks are at different values when the receiver is above or below the thermocline [
5]. According to the reciprocity principle, the distribution will peak, depending on the depth of the source for a fixed near-surface receiver.
can also be extracted by using the warping transform in the frequency domain from the interference pattern without knowing the source range [
6]. However,
requires relative movement between the source and receiver, since the modal interferences occur in the range domain.
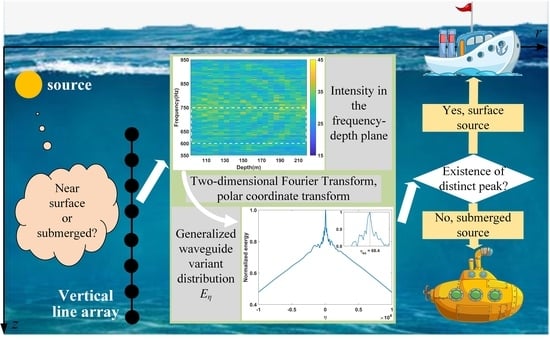
Note that there are modal interferences in the frequency–depth () plane that behave comparably to those in the plane, determined by the dominant modes associated with the source depth. This paper discusses the discrimination between surface and submerged sourcesin shallow water, which are above or below the thermocline, respectively. The group of NTMs, which dominate the surface source, produces an observable striation pattern in the acoustic intensity, while the interferogram of the submerged source is chaotic. The proposed method utilizes a vertical line array (VLA) to “capture” these interference patterns, which are described by a generalized waveguide variant (GWV) distribution. The existence or lack of a distinct peak in the distribution represents the presence or absence of the striation, which is further used to discriminate surface and submerged sources. The method is valid for a higher frequency source, as its NTMs have similar characteristics compared to those from low-frequency sources. The accumulation in the depth domain allows for some robustness against noise. In addition, the value of the GWV is related to the source range; however, the discrimination does not require this value, which means that the source range can be unknown.
The paper is organized as follows. In
Section 2, the GWV
is derived in the
plane with interferometric signal processing. The method based on
for source depth discrimination and the requirements of method based on the source frequency are presented. In
Section 3, the proposed method is performed on the data from the towing ship in the SWellEx–96 experiment. The striation pattern and
of the intensity distribution in the
plane generated by the surface source are verified. In
Section 4, the numerical modeling results for the same experimental situation are presented. Complementing the simulations of the submerged source, which does not meet the implementation requirement in the experiment, the proposed discrimination method is validated. Furthermore, the performance under noise conditions and for different source ranges is investigated. A summary is presented in
Section 5.
2. Discrimination Using Intensity Striations in the Plane
2.1. Generalized Waveguide Variant Describing the Intensity Striations
For a point source at depth
, the acoustic intensity at depth
z and range
r can be expressed as [
7]:
where
M is the total number of normal modes excited by the source, and
and
are the depth function and the horizontal wavenumber of the
mth mode, respectively.
is the conjugate operator.
The intensity maximum in the frequency–depth (
) plane is determined by the following condition
The slope of the striations
is
where
is the group slowness of the
mth mode.
A generalized waveguide variant (GWV)
of the
plane is defined as
Equation (
5) can be rewritten as a sum of weighted components
with coefficients
representing their contributions to the variant (similar to the derivation of
in [
8]), given by
where
Under the WKB [
7] approximation, the mode function
can be expressed as
where
is the vertical wavenumber of the
mth mode. Consider the situation when the VLA is deployed below the thermocline, which means the receivers are below all the turning points of trapped modes, making
and
both constants. Therefore,
Since many
values, as pairs of modes
, contribute to the GWV, a distribution of
denoted by
better quantifies this complex striation pattern, similar to
proposed in [
9,
10,
11].
As mentioned above, the GWV is converted from the slope of the interference striations, which can be calculated by using two-dimensional Fast Fourier Transform [
12] (2D–FFT) on the intensity distribution
. The corresponding algorithm follows [
9,
10] and will be briefly reviewed below.
The 2D–FFT of
with depth aperture
D and bandwidth
B is defined by
where
and
are the mean values of axis
f and
z, and
x (in
) and y (in s) are the FFT variables conjugate to the depth and frequency, respectively. We replace the slope in Equation (
5) with its expression in the Fourier domain and obtain
and the GWV can be represented in another set of variables related to the polar coordinate system by choosing
The GWV distribution is given by summing up K in the plane, which is the result of the polar coordinate transform. The presence of a clear peak indicates the existence of striations and the corresponding slope at .
2.2. Discrimination Based on the GWV
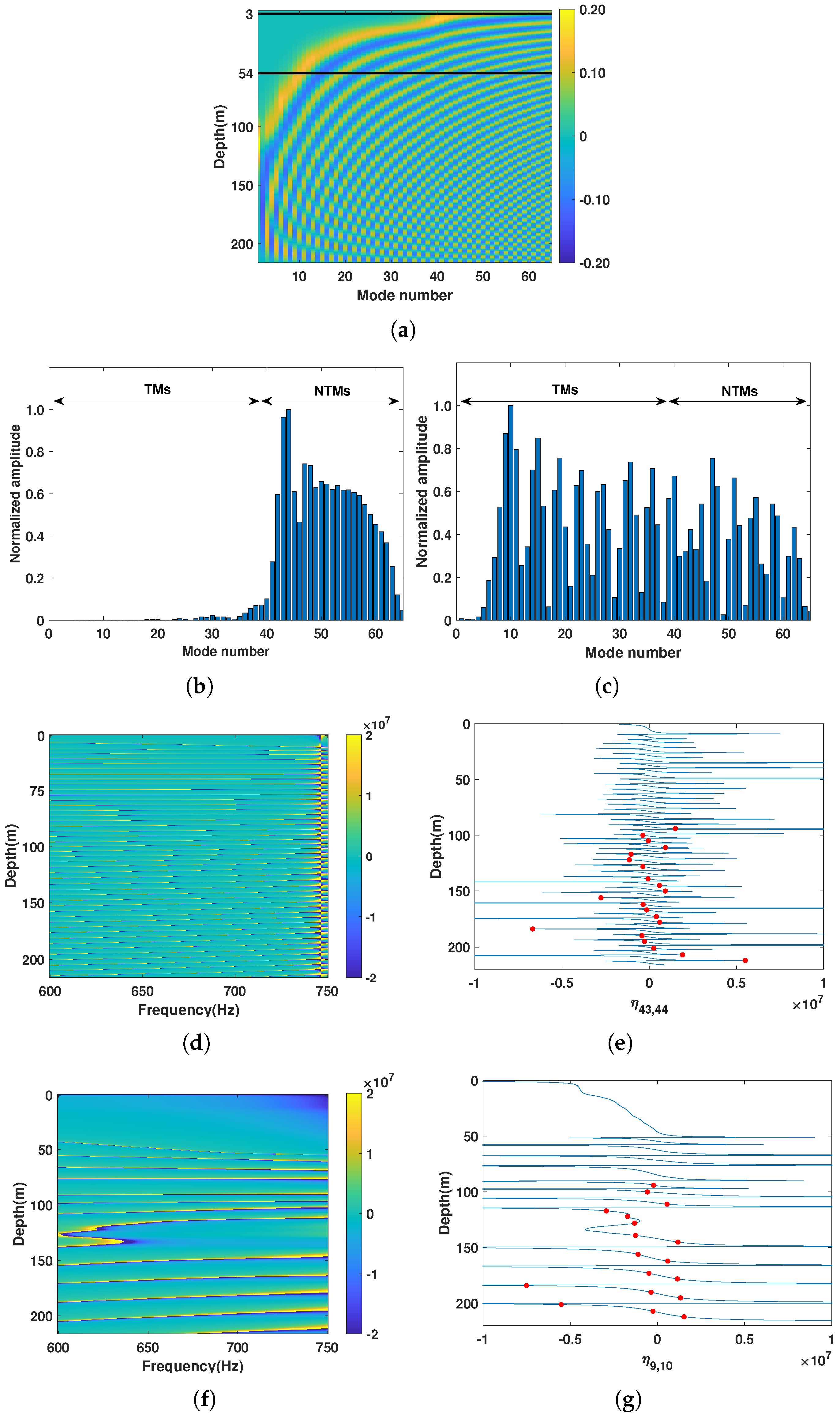
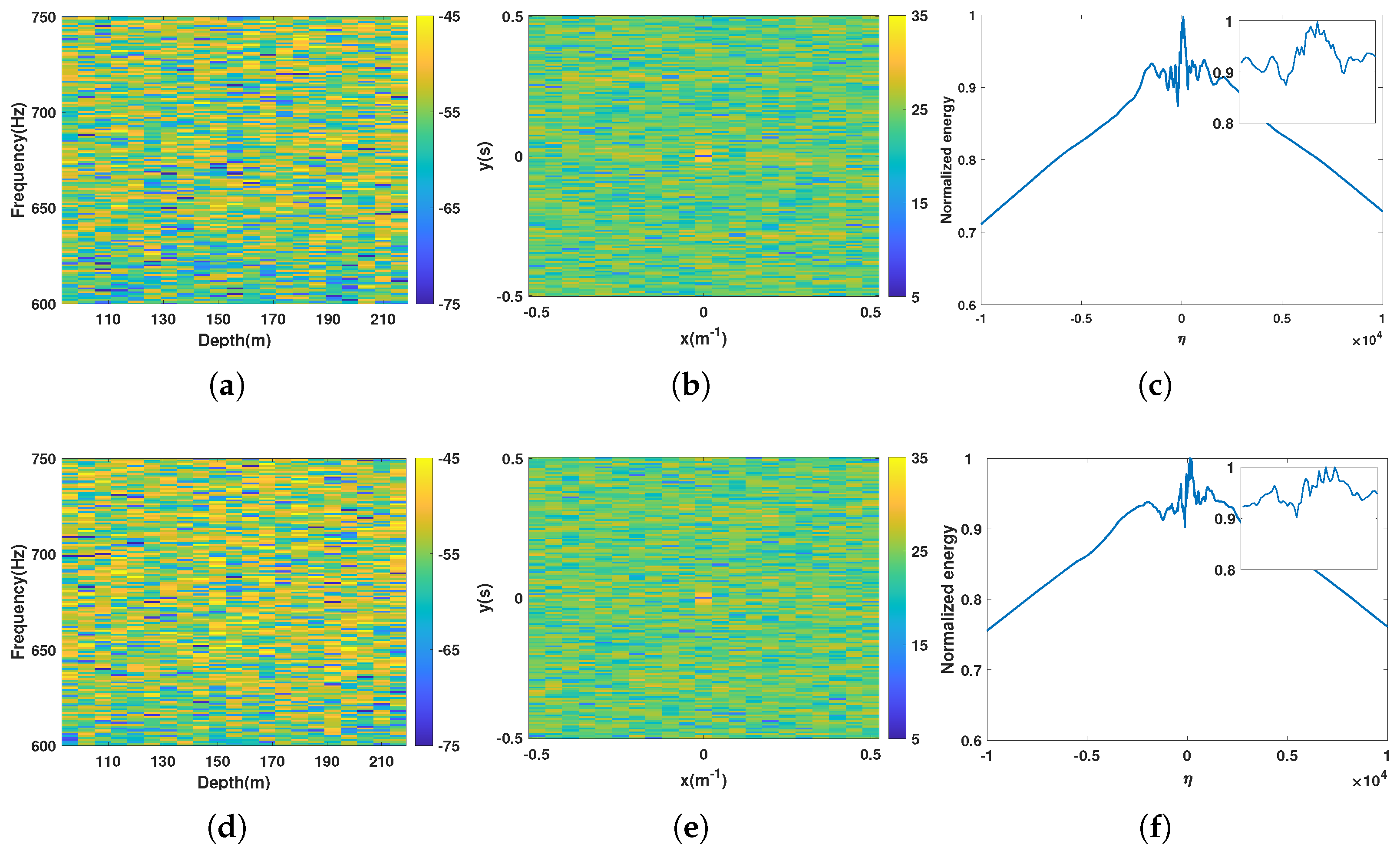
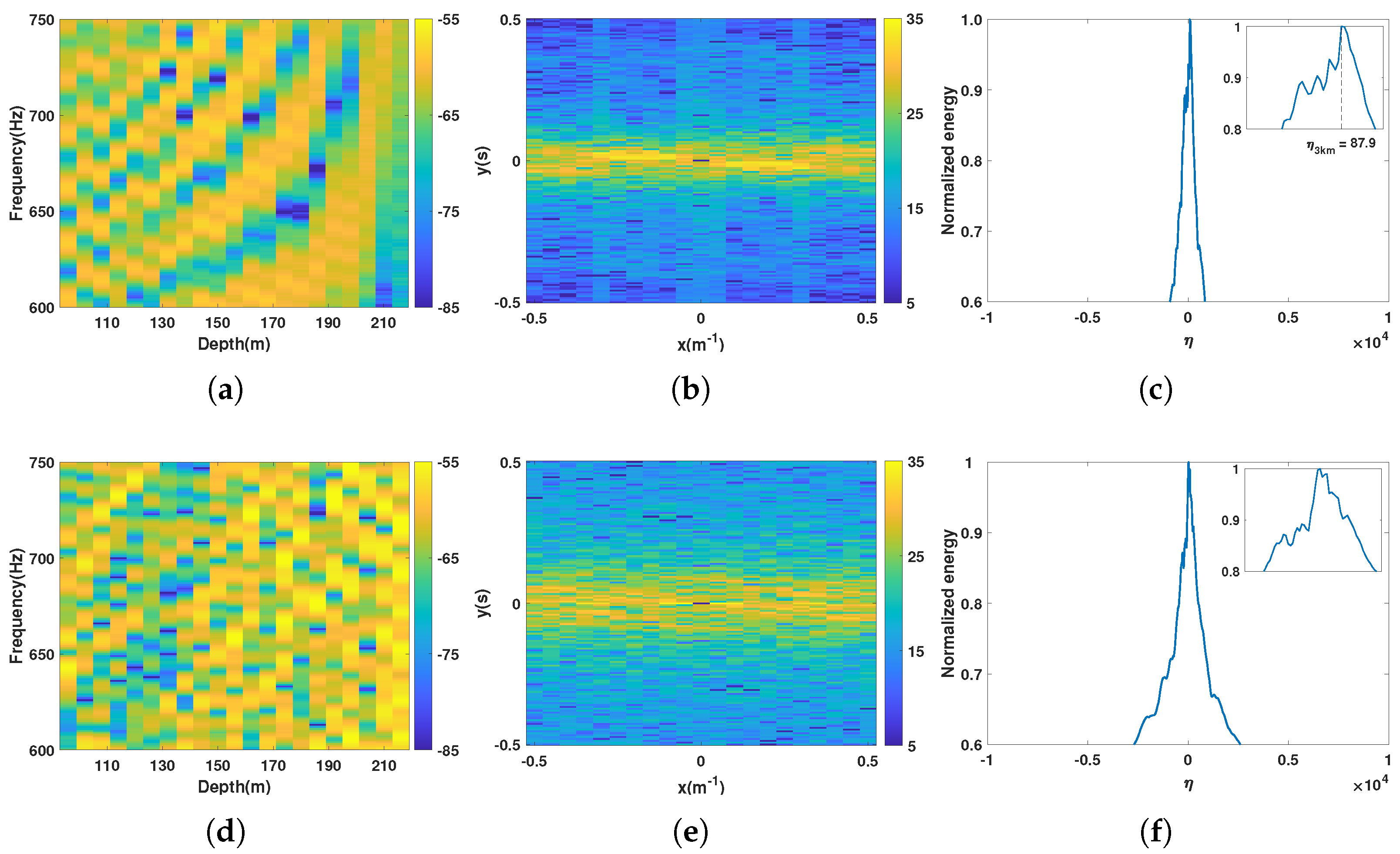
In shallow water with a thermocline, when the source is located above the thermocline, only the first several NTMs exist, since the TMs are poorly excited, and the higher order modes attenuate rapidly during the propagation. These NTMs can be regarded as a group of modes due to their similar , which will further behave similarly in and . As long as the sample locations are not at the depths where the approaches 0, the enhancement of these provides a proper value of (a peak of the GWV distribution) and corresponding striations in the plane.
However, for the submerged source, which excites both TMs and NTMs, the of the modes vary by an order of magnitude, resulting in the change in the function period. Therefore, the sum of containing with different periods cannot make a certain value, which means that the interferogram will be chaotic, and no striations will exist.
As a crucial parameter, shown in Equation (
10), for the proposed method,
determines
and
for the fixed receiver depths. In general,
increases with the source frequency, but its rate decreases. For a higher-frequency surface source, the
of NTMs vary slowly during the frequency band, resulting in similar periods of
, which further ensure the enhancement of those
. In the case of discriminating the lower-frequency surface source, the fact that the
of NTMs in the processing band vary greatly, and the periods of
change rapidly, means the summation of
is like that of the submerged source, and it fails to distinguish between these two source classes.
As shown in Equations (
5) and (
12),
is related to the source–array range
r, which implies that the slope of the striation is scaled up/down by the ratio of the range (if the range is estimated before or later, which is outside the scope of this paper). However, the scale change does not affect the striation’s existence. It is the fact that the distinct peak of
exists and not the value itself that is an important clue to whether the target is on the surface or submerged. These above observations are verified using experimental and simulated data in the following sections.
3. Experimental Data Analysis
The SWellEx–96 experiment [
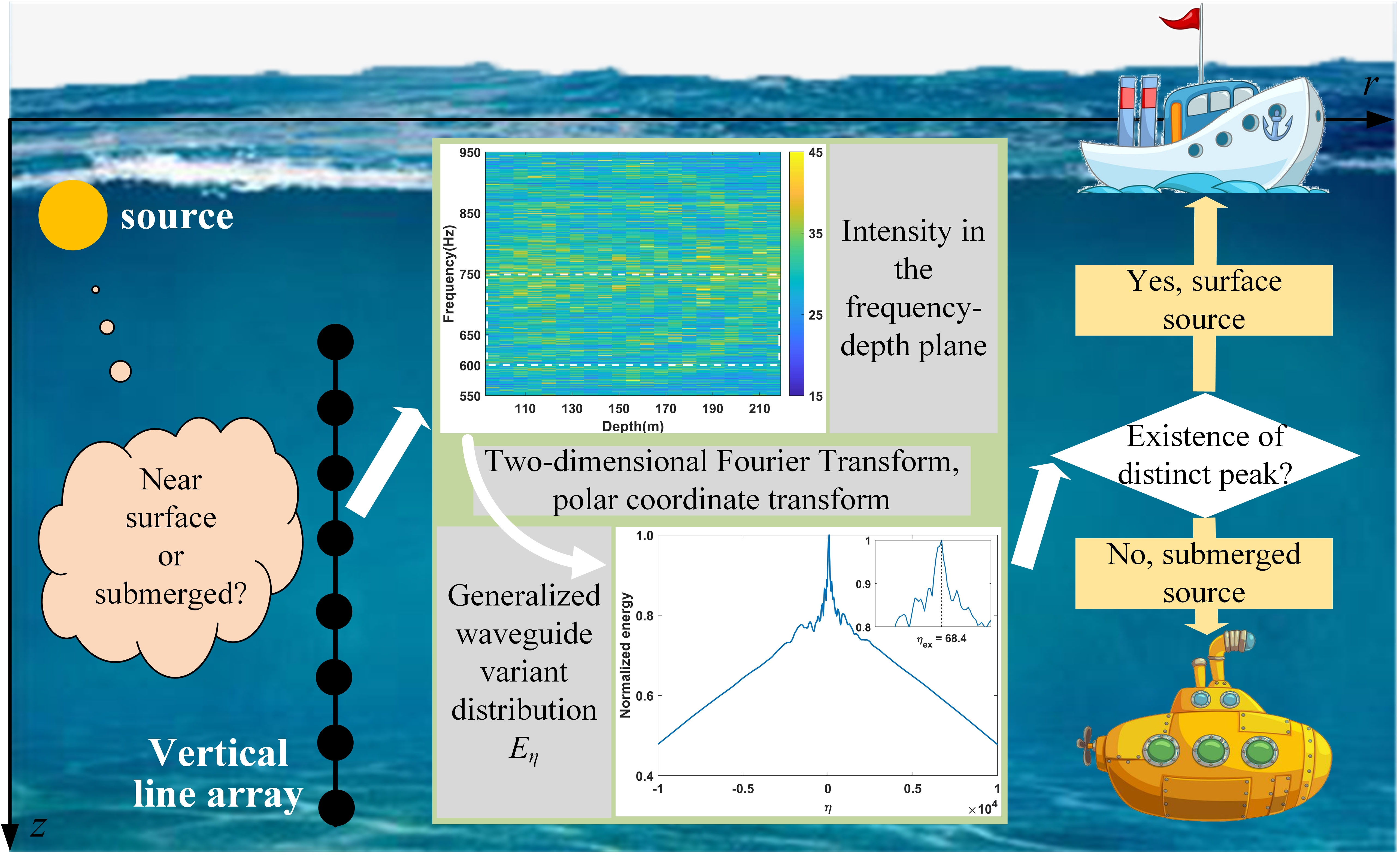
13] was conducted near San Diego, CA, in May of 1996. The SSP can be approximately regarded as a typical downward refracting profile with a thermocline. The VLA was deployed from a depth of 94.125 m to a depth of 212.25 m and contained 21 elements that were evenly spaced (ignoring the small vertical tilt). The range in the depth was nearly the same as in the situation discussed in
Section 2, since it was below the thermocline. The SSP and the array configuration are presented in
Figure 1.
One second of data were analyzed, which was 73 min after the start of event S5, where the towing ship (R/V Sproul) was 2.323 km from the VLA. The analyzed data involved one signal with the band
(600–750 Hz) radiated by the towing ship (at a depth of 2.9 m [
14]), which was regarded as a surface source. The reasons for not choosing the two experiment sources were as follows: (i) a broadband source was required, since it had the premise of an interference structure, while the shallow source transmitted nine frequencies between 109 Hz and 385 Hz; (ii) although the deep source stopped projecting CW tones and started projecting FM chirps (200–400 Hz) at the beginning, midway point, and end of the track, its frequency was not applicable (too low) in this scenario.
Figure 1.
The SSP of SWellEx–96 and the arrangement of VLA.
Figure 1.
The SSP of SWellEx–96 and the arrangement of VLA.
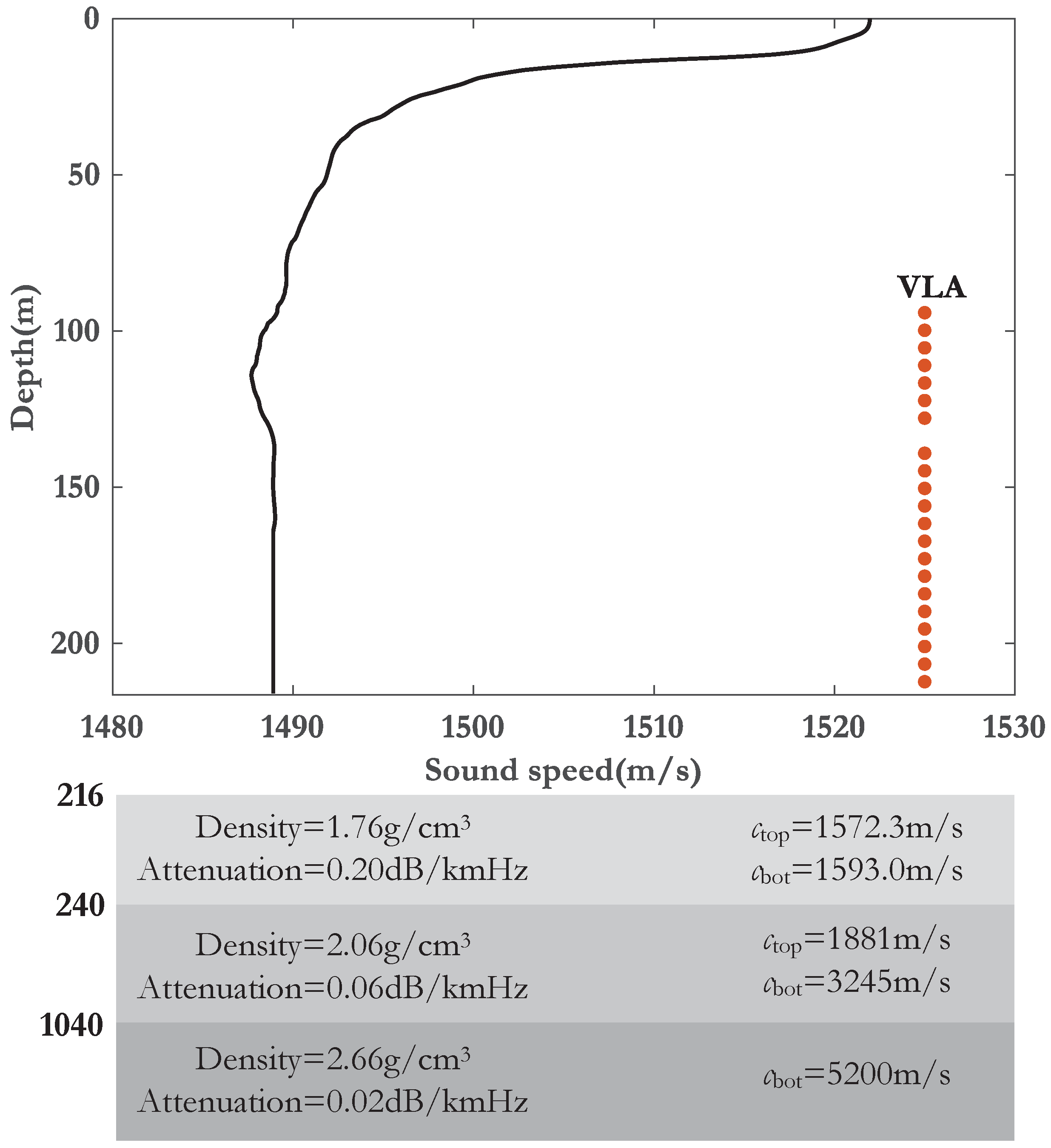
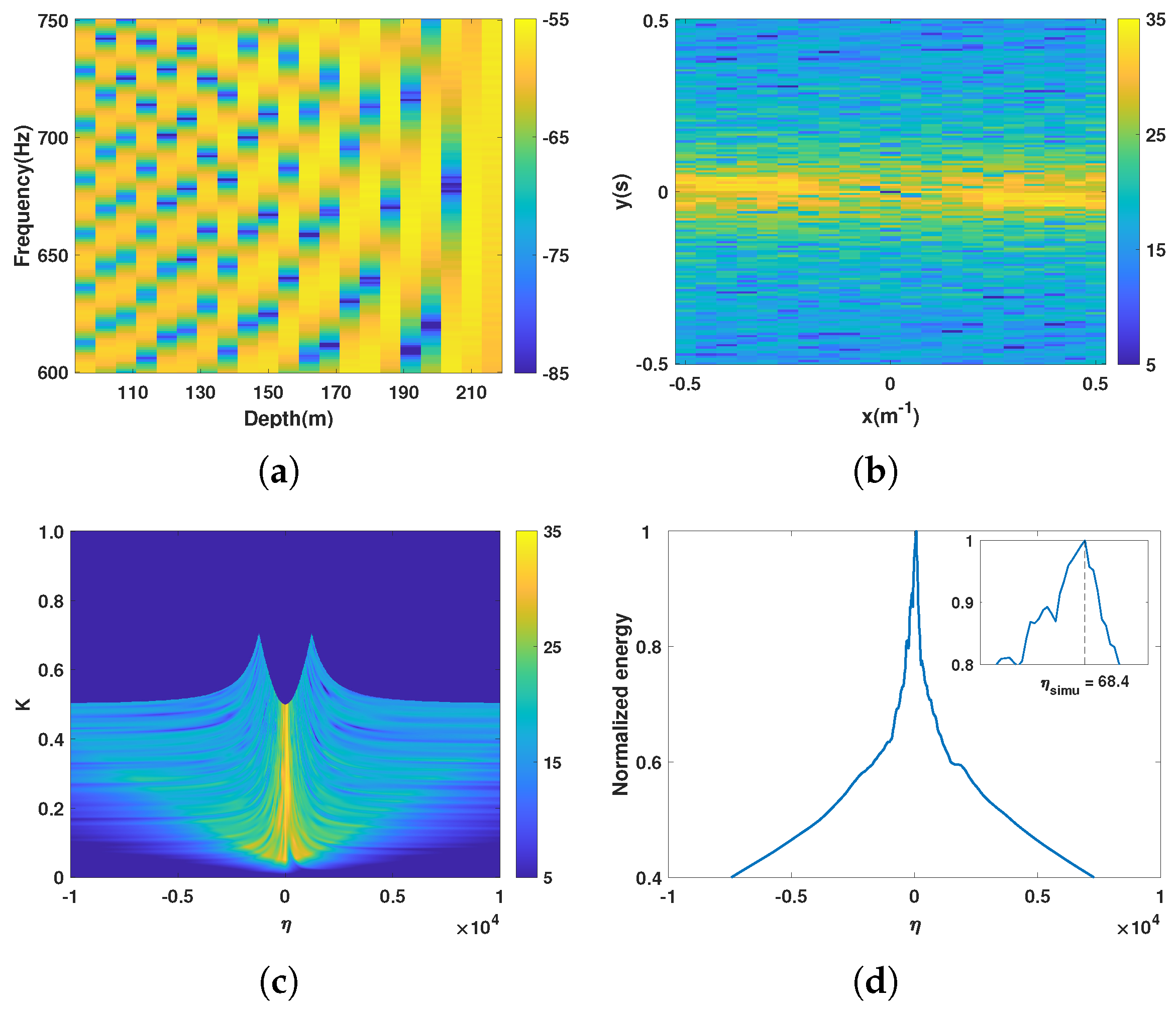
The results of the experimental data processing are shown in
Figure 2. The intensity distribution
Equation (
1), 2D–FFT of
Equation (
12), 2D–FFT in the polar coordinates, and the GWV distribution
are shown for the assessing procedure.
One can observe the intensity striations in
Figure 2a (to show the striations more clearly, we show the image with a larger bandwidth (550–900 Hz), which is symmetrical at about
f = 750 Hz, since the sample frequency of the data is 1500 Hz). It is worth mentioning that the striations were not caused by frequency shifting, although there were several tones (such as 605 Hz and 677 Hz) projected by the towing ship, since the speed of the ship was 2.5 m/s (5 knots), and the length of the data was 1s.
Figure 2b shows the result of the 2D–FFT of the region enclosed by the white dashed lines in
Figure 2a and exhibits a vertical line resulting from the background noise.
We removed this vertical line and performed the polar coordinate transform (the transformations later were all conducted after vertical line removal) in
Figure 2c.
Figure 2d shows the GWV distribution
of the data we analyzed, and the peak
.
Figure 2.
The results of the experimental data: (a) ; (b) 2D−FFT of ; (c) 2D−FFT in the polar coordinate; (d) the GWV distribution and zoom of peak.
Figure 2.
The results of the experimental data: (a) ; (b) 2D−FFT of ; (c) 2D−FFT in the polar coordinate; (d) the GWV distribution and zoom of peak.
5. Conclusions
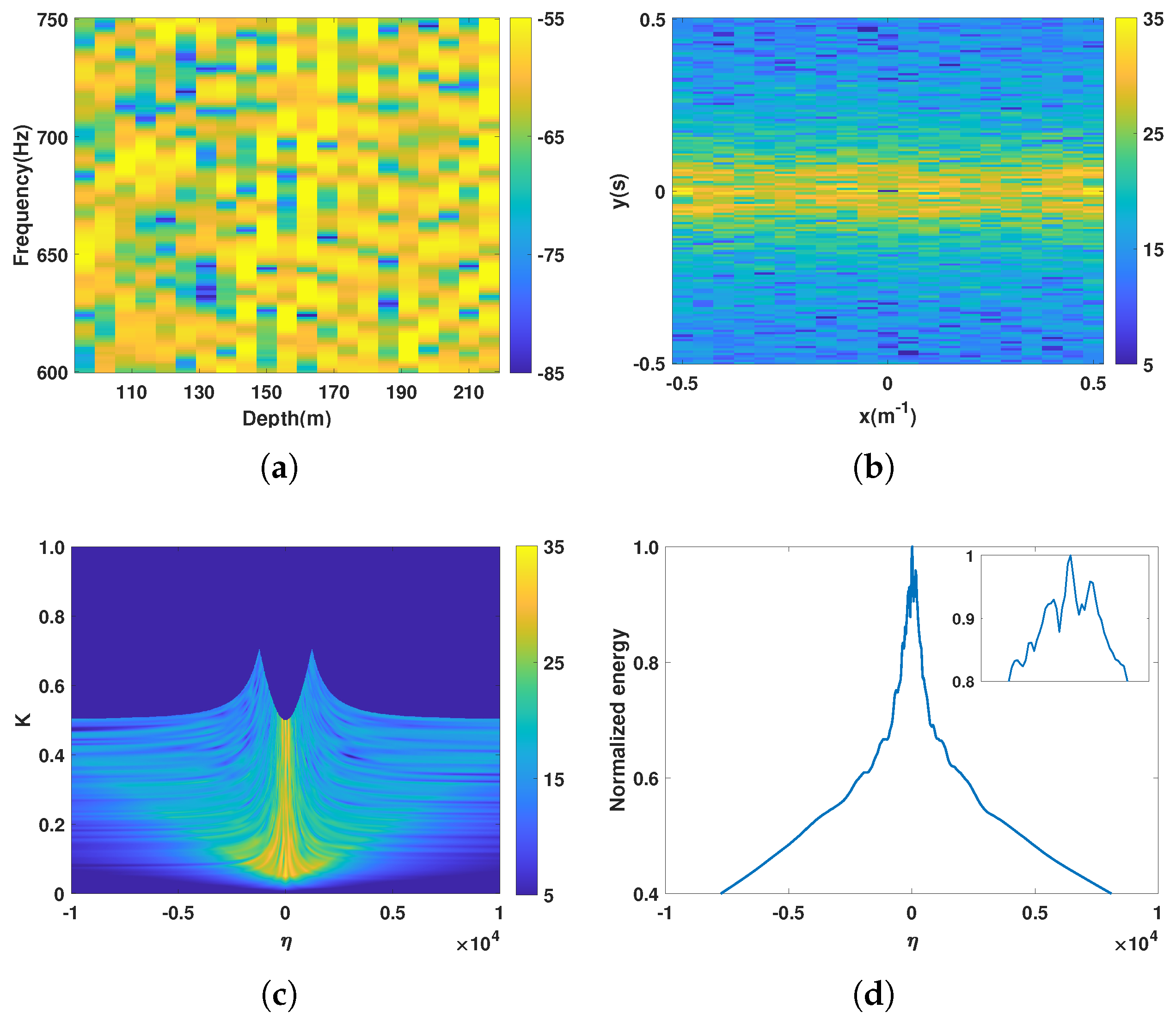
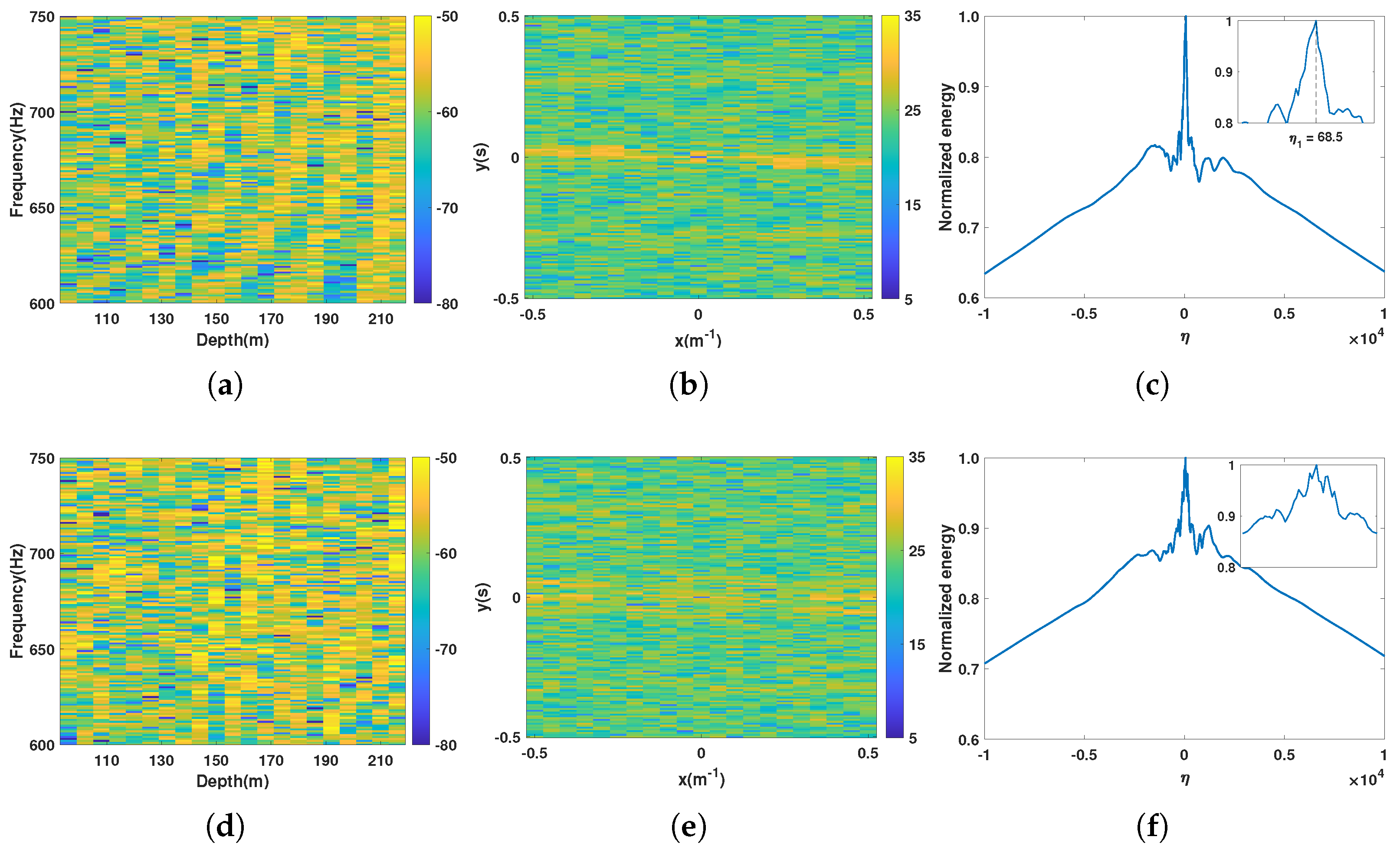
A method for source depth discrimination is presented for VLA based on the presence of intensity striations extracted from the frequency–depth plane. The orientation of this intensity interference pattern is characterized as a generalized waveguide variant called , which was derived in this paper, dominated by different types of normal modes excited by a surface/submerged source. Analytical expressions illustrate that for the higher-frequency surface source, the source interferogram shows the intensity striation patterns clearly and the distribution of peaks associated with the source range. However, for the submerged source, the interferogram is chaotic, and the distribution of does not show the peak (there are many high sidelobes).
This method was verified with experimental data and simulated data with reasonable success. For the surface source, there is a good agreement between the experimental intensity striation patterns and those predicted by the theory, as well as the peaks of in each situation. The successful discrimination with a low noise background and different source ranges further indicates the potential of the method on real data. It should be pointed out that, although is related to the source–array range r, it is the presence of the striations, not the value of its slope, that we use to determine the depth class of the source.














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}