
A Space Target Detection Method Based on Spatial–Temporal Local Registration in Complicated Backgrounds


Abstract
:1. Introduction
1.1. Background
1.2. Motivation
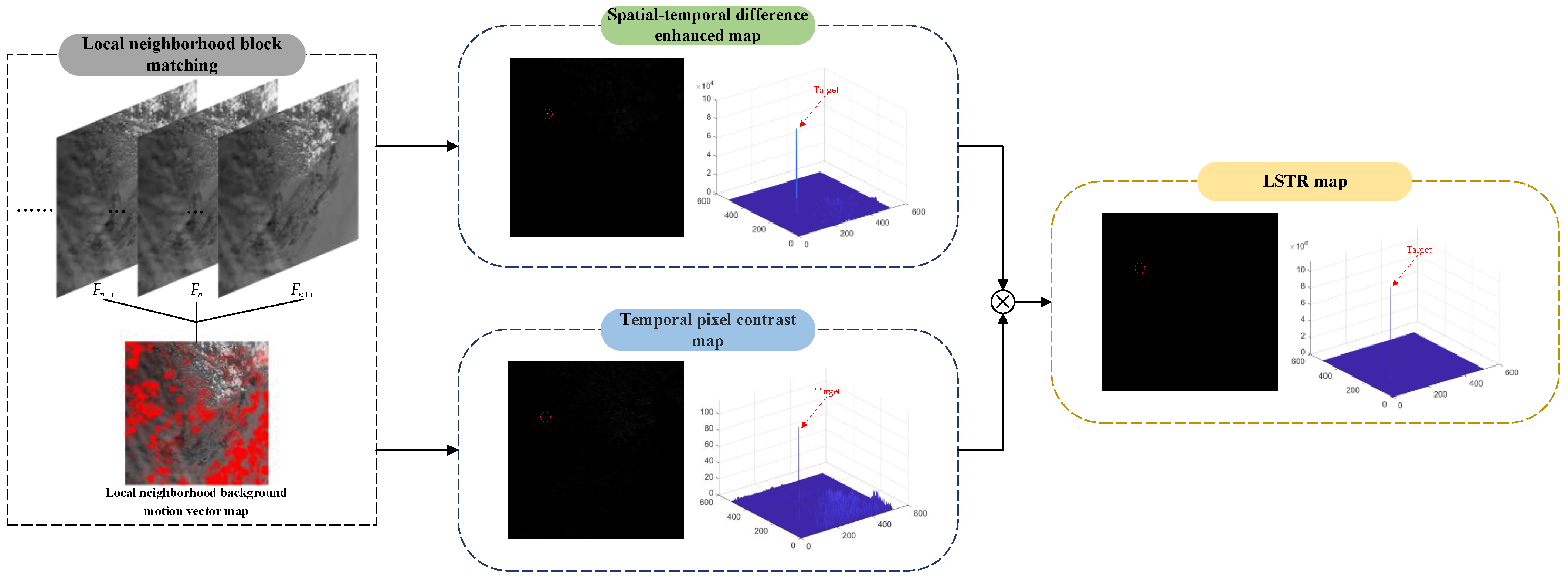
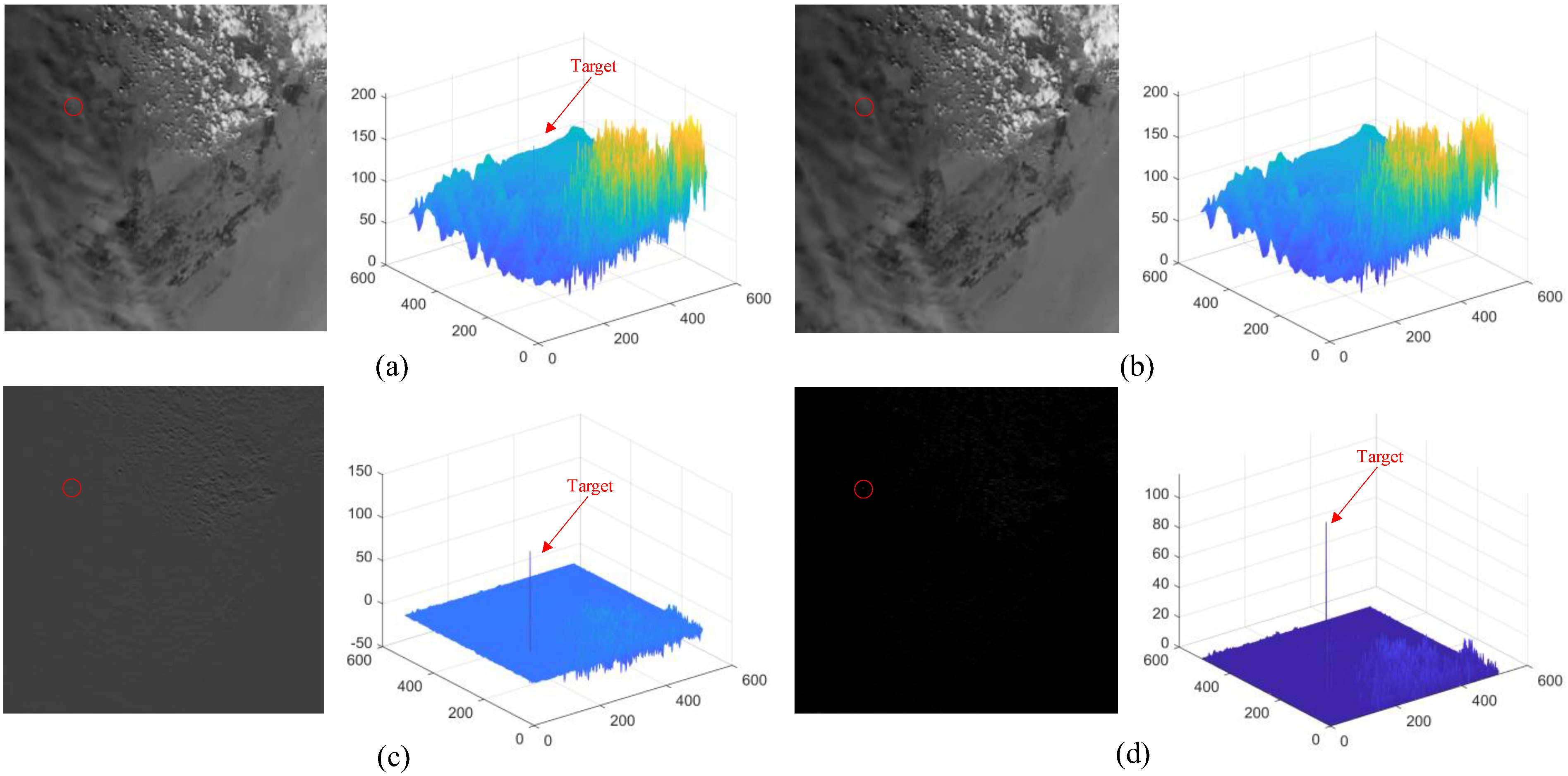
- A method for space moving-target detection under complex backgrounds is proposed. It uses the motion difference between the target and its local surrounding background region to highlight the target and reduce strong background clutter. A spatial–temporal difference enhancement map and A temporal pixel contrast map are calculated to enhance the target signal.
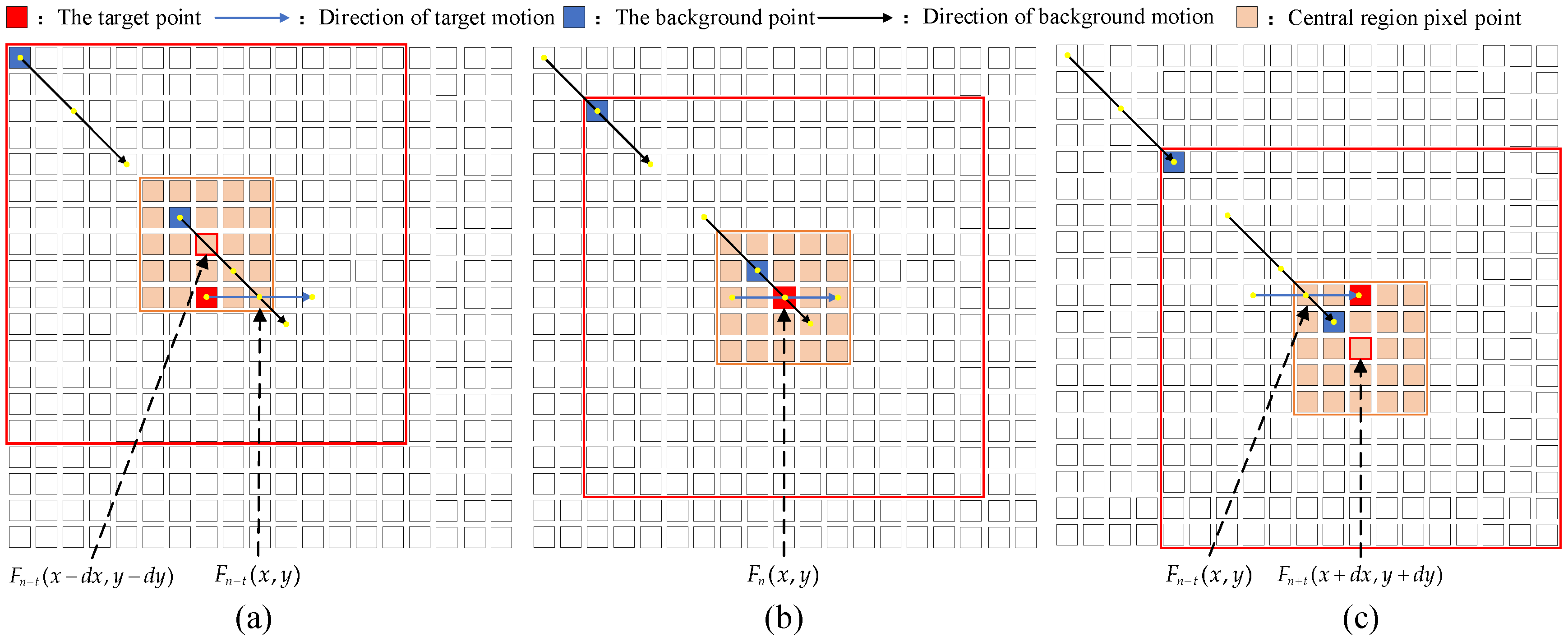
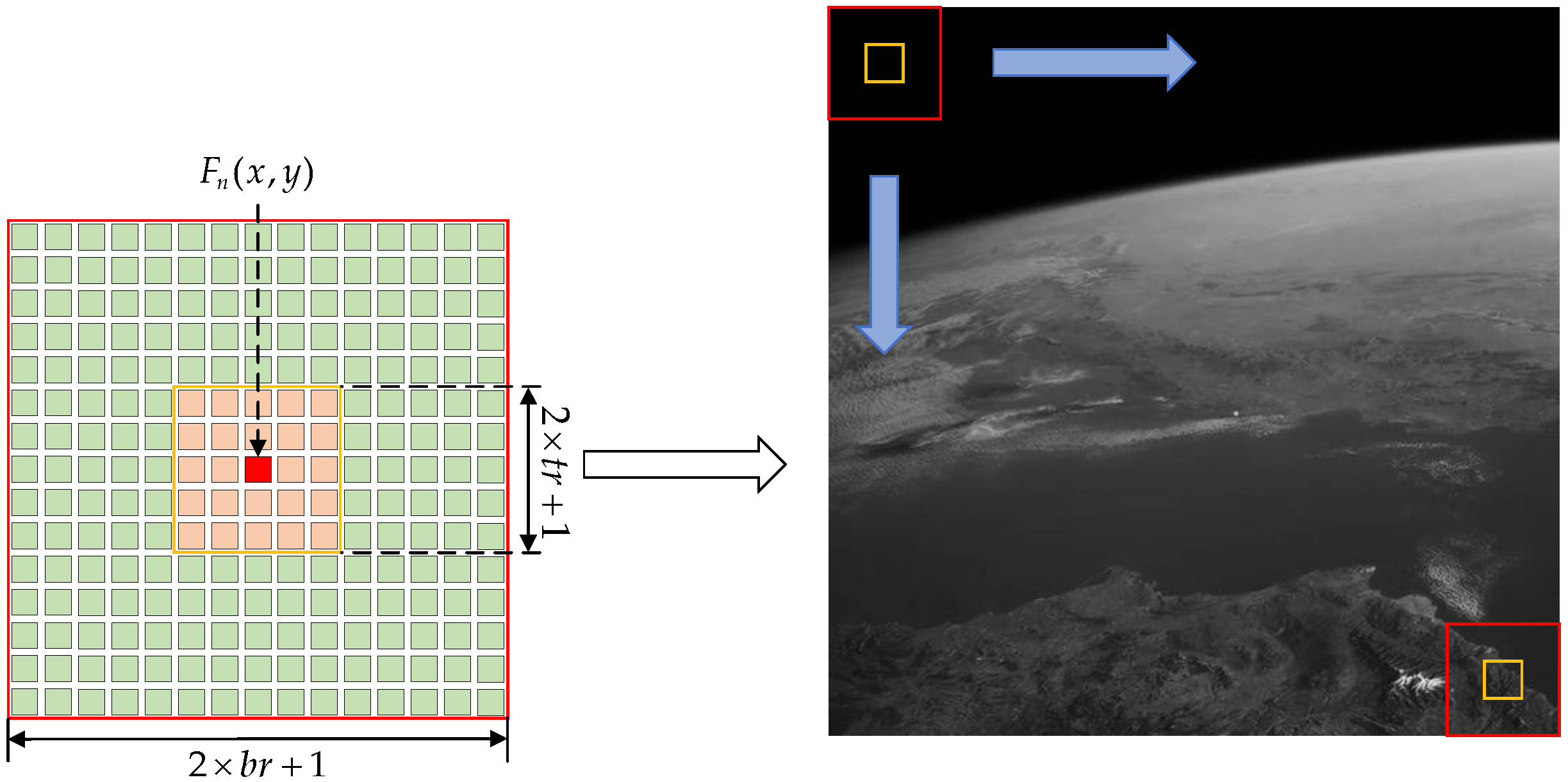
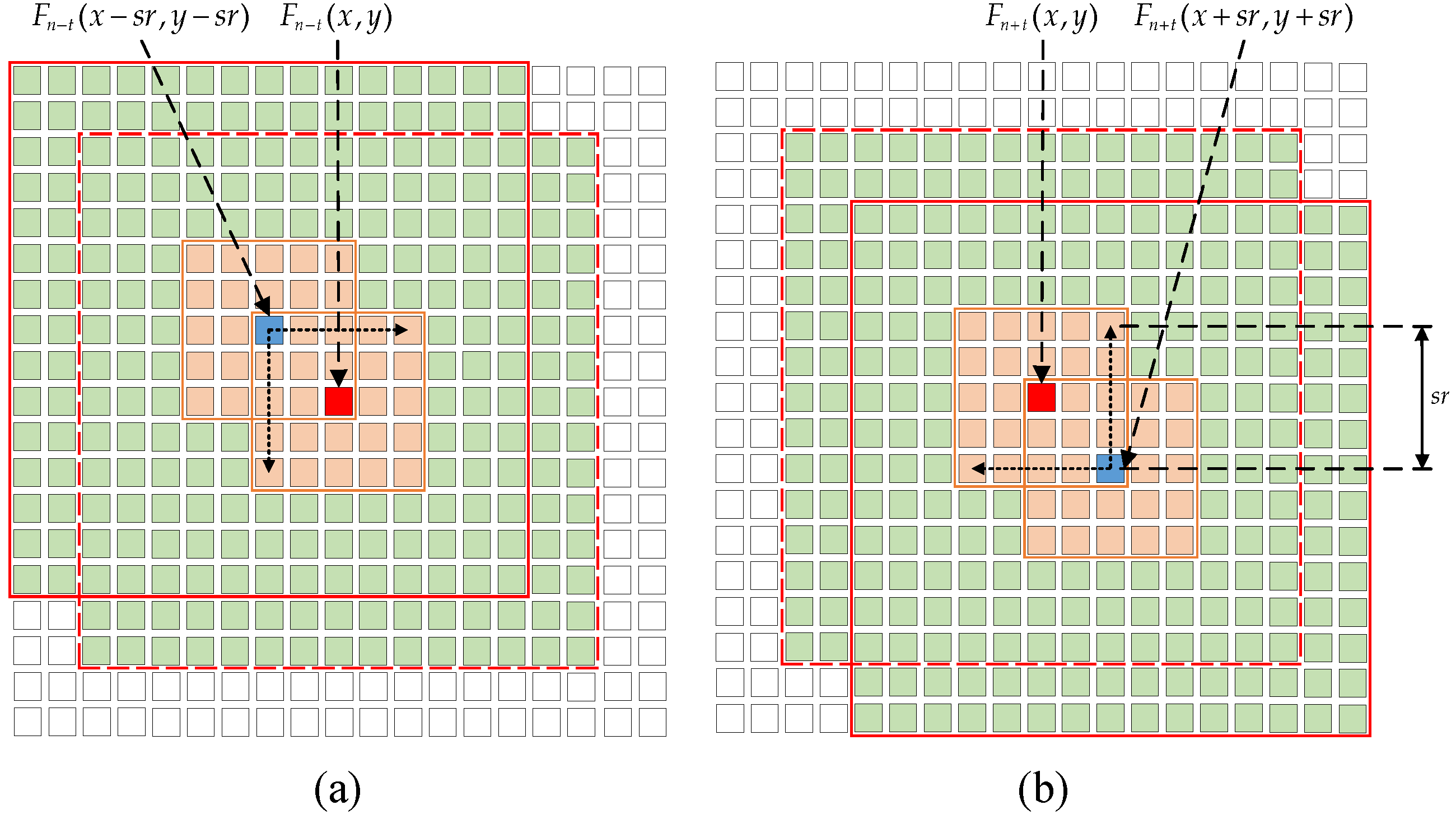
- A local neighborhood spatial–temporal matching strategy is proposed, which estimates the local surrounding background motion model by registering local slices with a shielded center region.
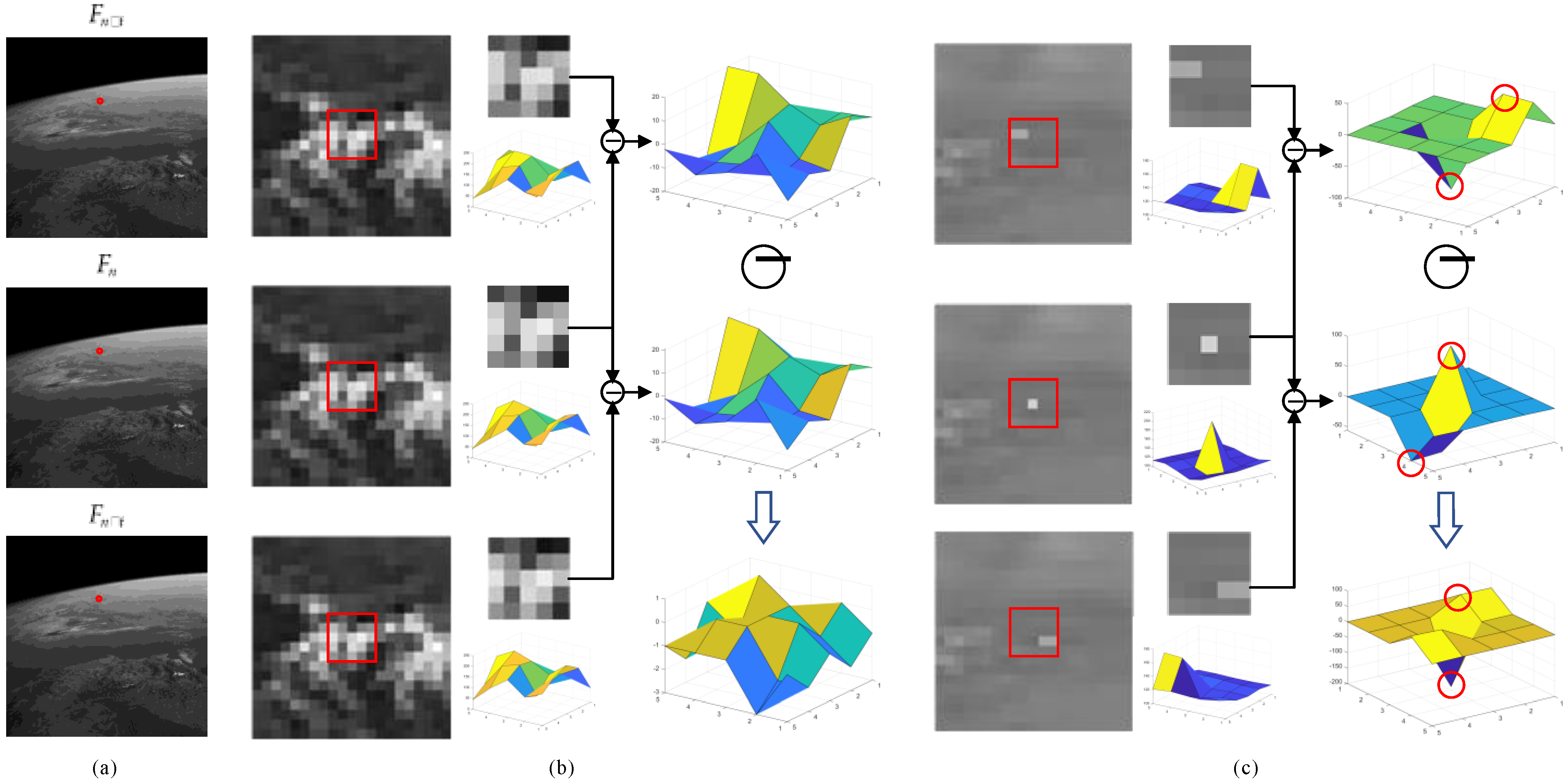
- A spatial–temporal difference enhancement map (STDEM) target enhancement factor is designed based on the spatial–temporal registration results. By analyzing the grayscale difference of the central matching blocks between the target and clutter, the STDEM extracts the positive and negative grayscale peaks of the difference results to strengthen the target energy.
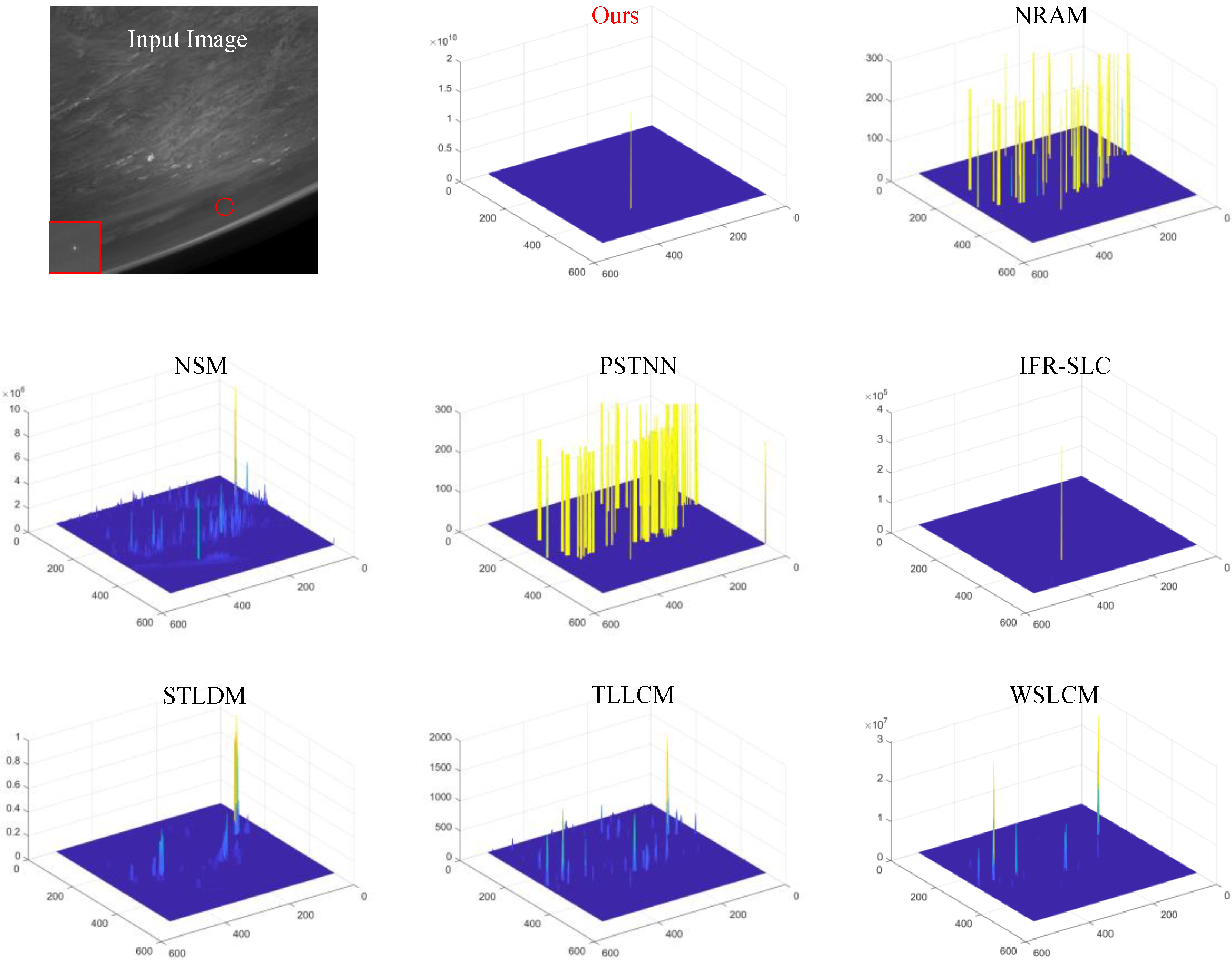
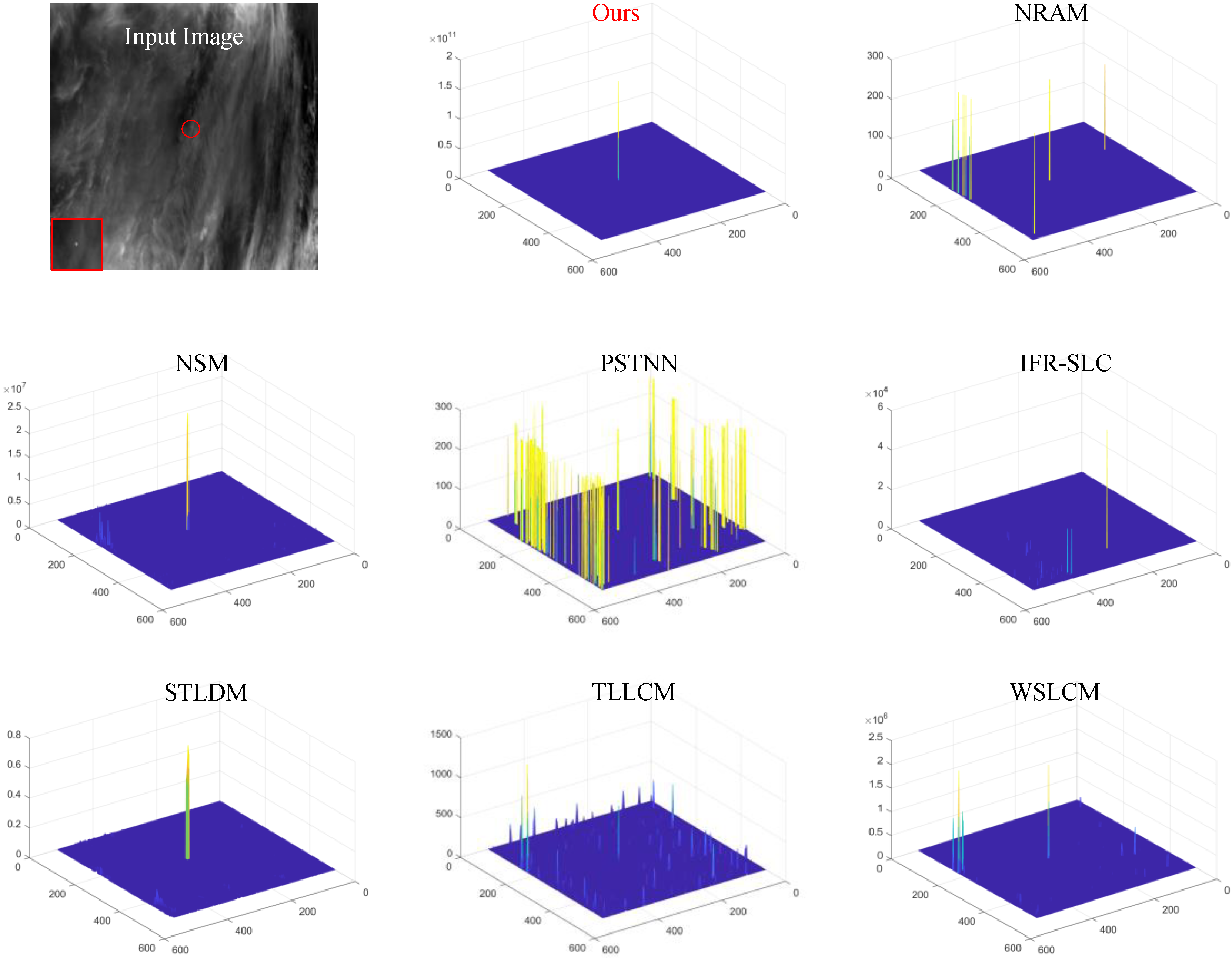
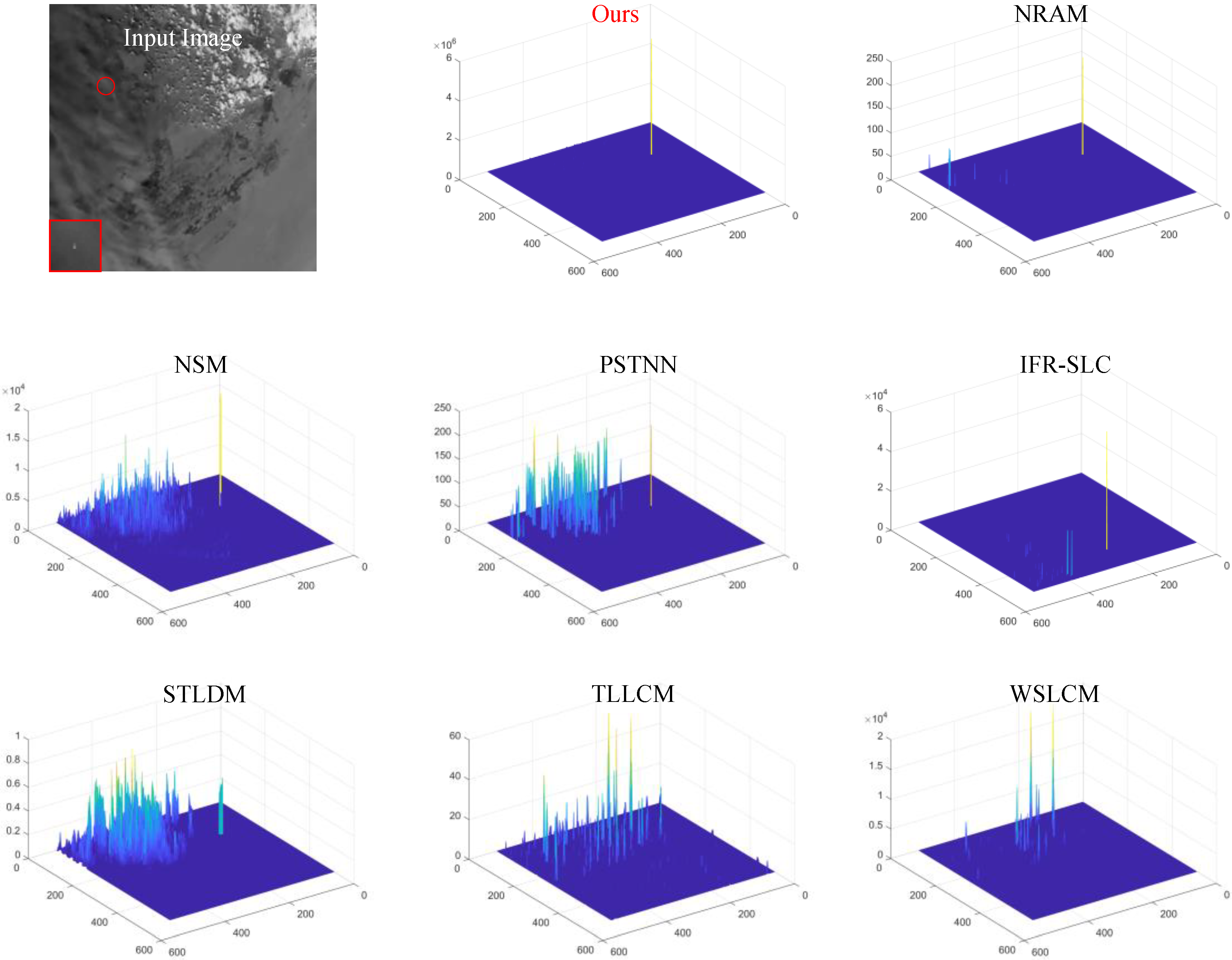
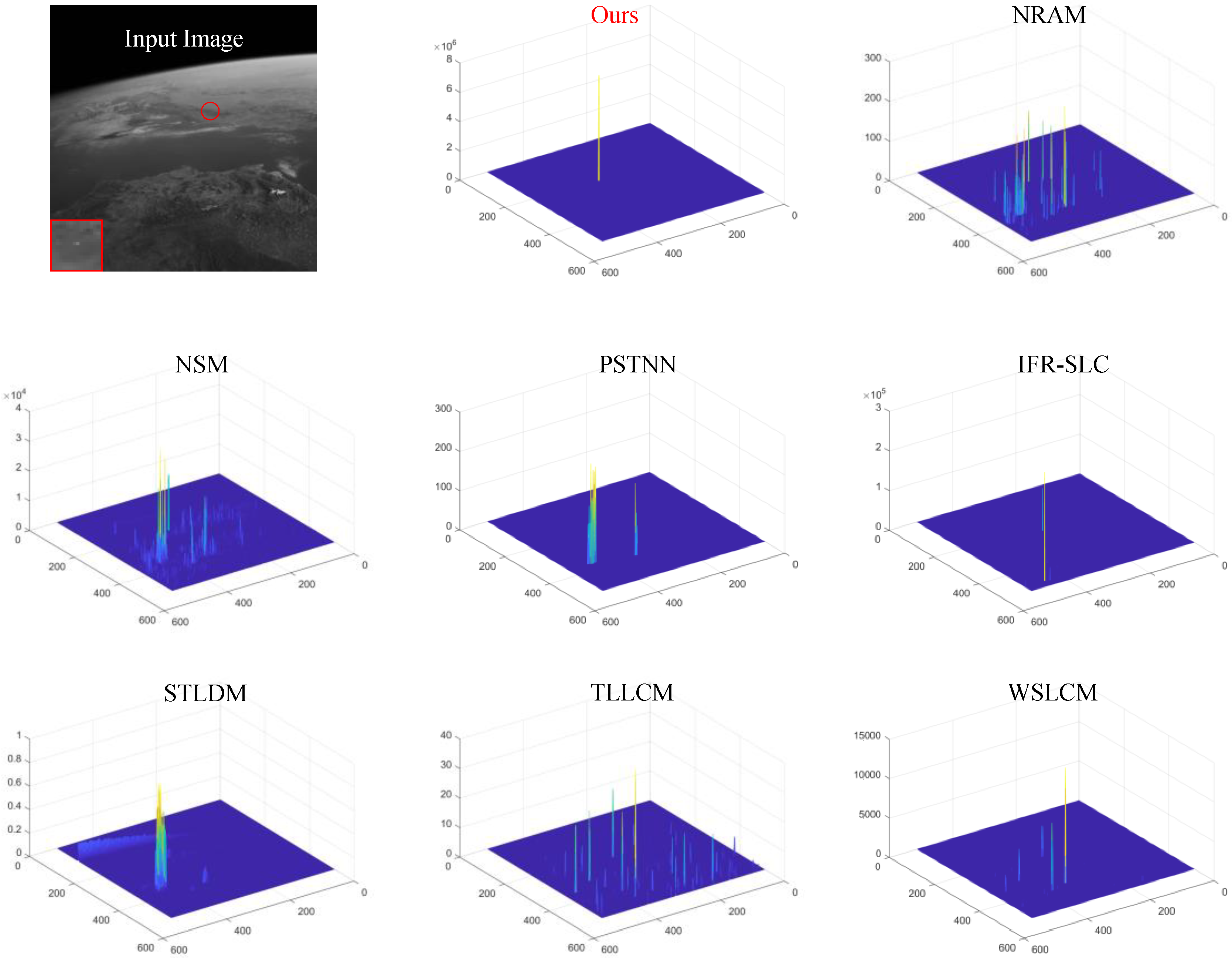
- Extensive experiments are conducted on the simulated datasets synthesized by the actual optical image background. The experimental results show that the proposed method can filter most of the strong background clutter composed of ground surface and complicated clouds and has an excellent target detection performance in complex backgrounds.
2. Related Works
3. Methodology
3.1. Local Neighborhood Spatial–Temporal Matching
3.2. Spatial–Temporal Difference Enhancement Map Calculation
3.3. Temporal Pixel Contrast Map Calculation
3.4. Local Spatial–Temporal Registration Map Calculation
4. Experiment and Analysis
4.1. Experimental Datasets
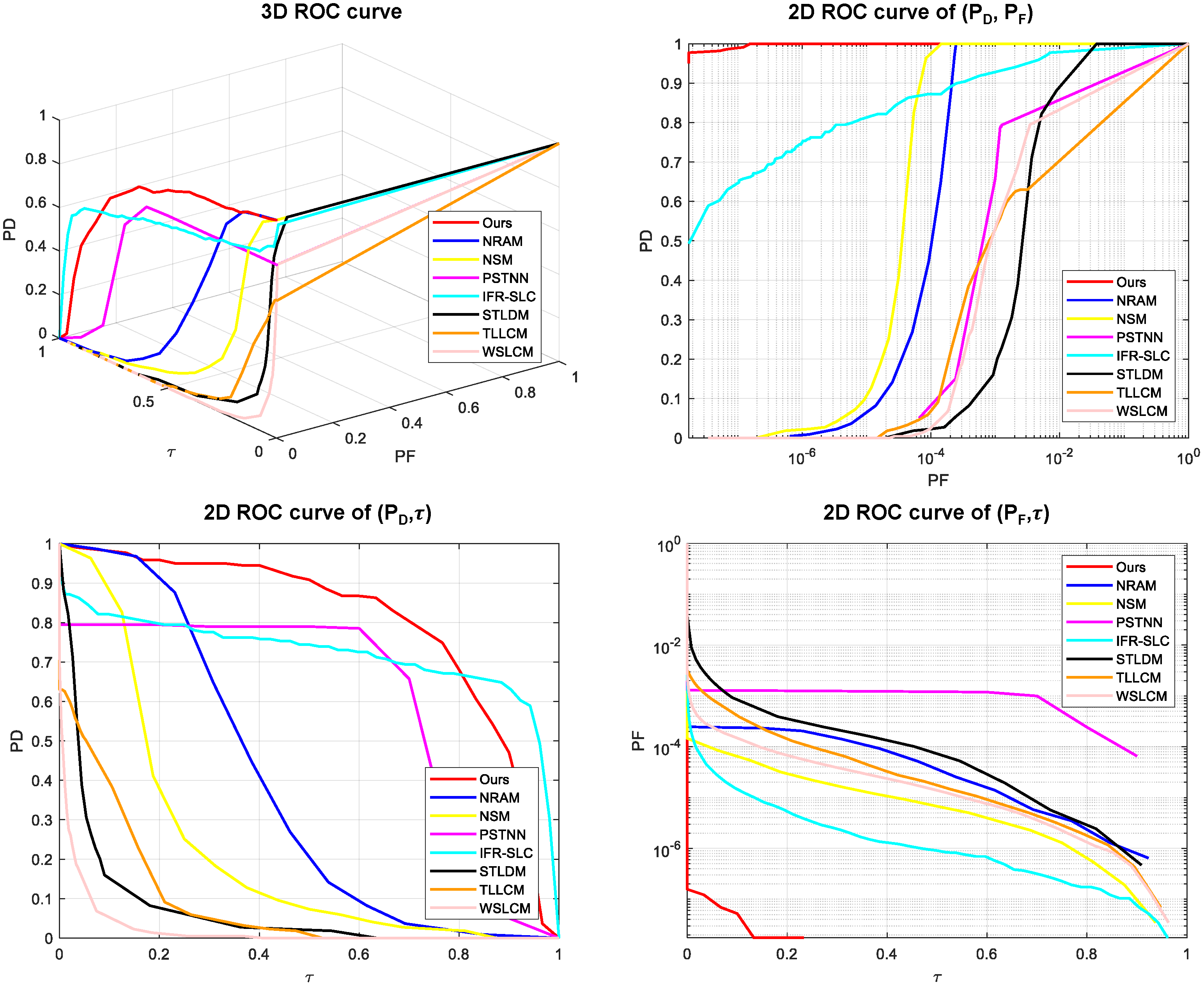
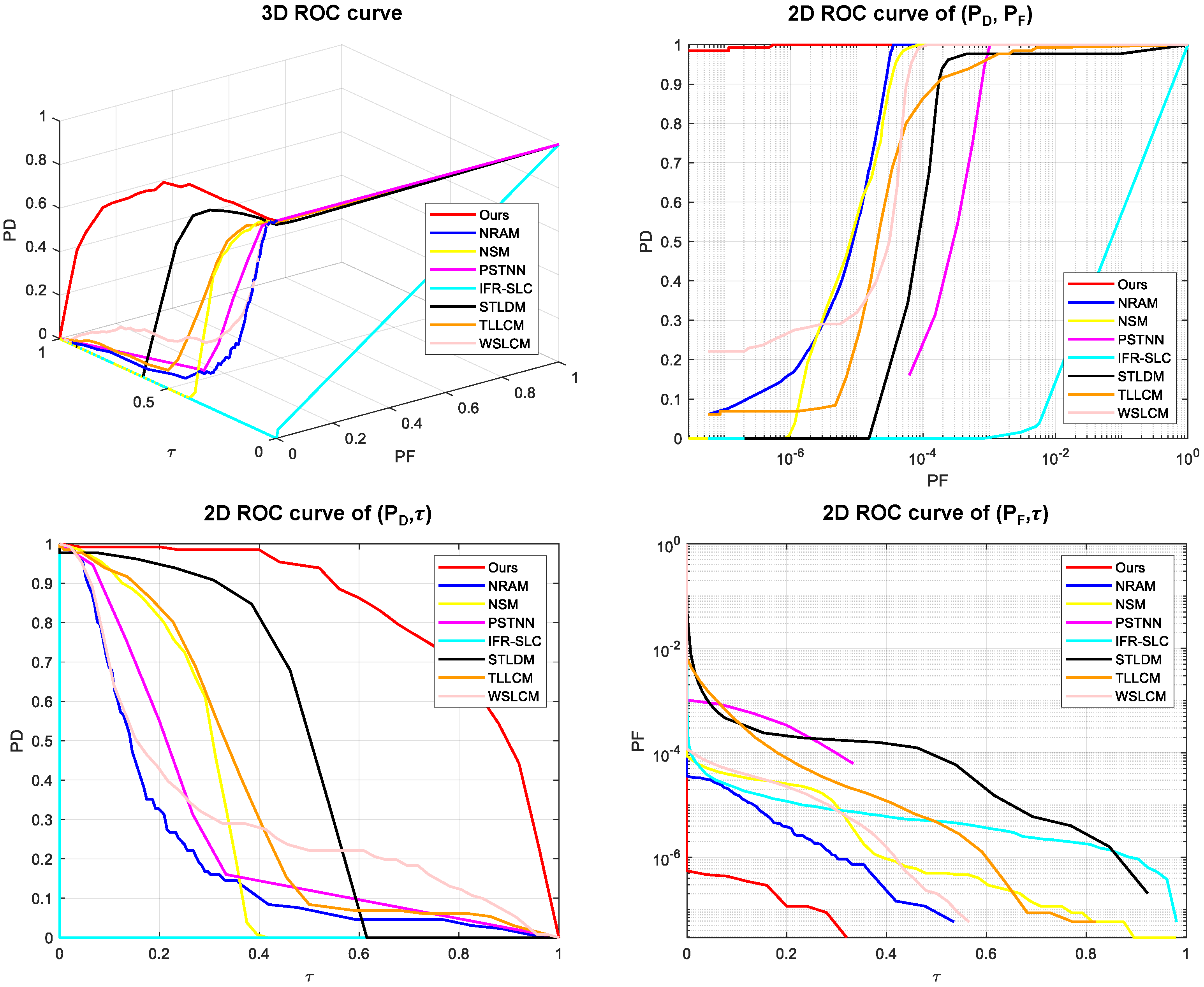
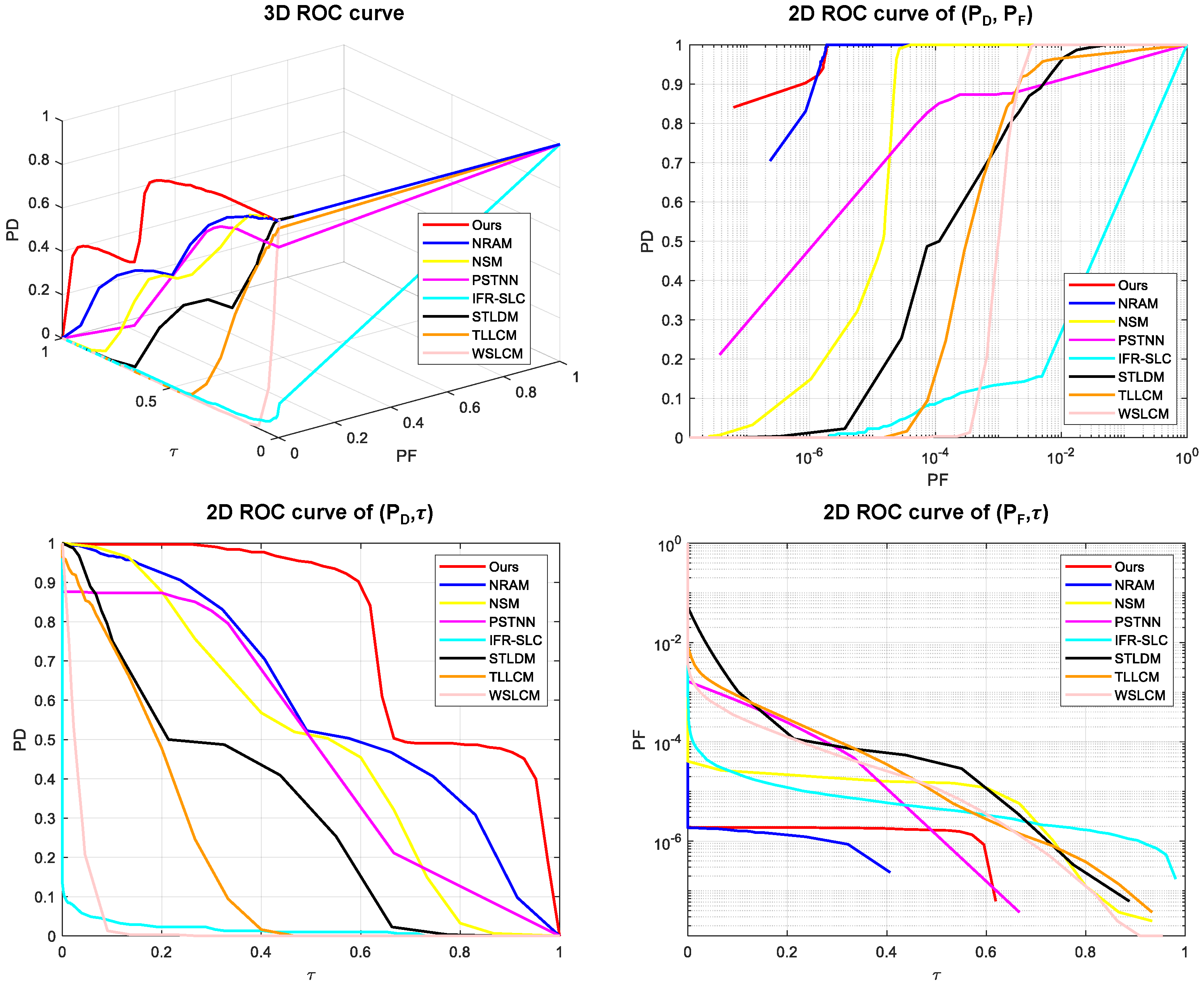
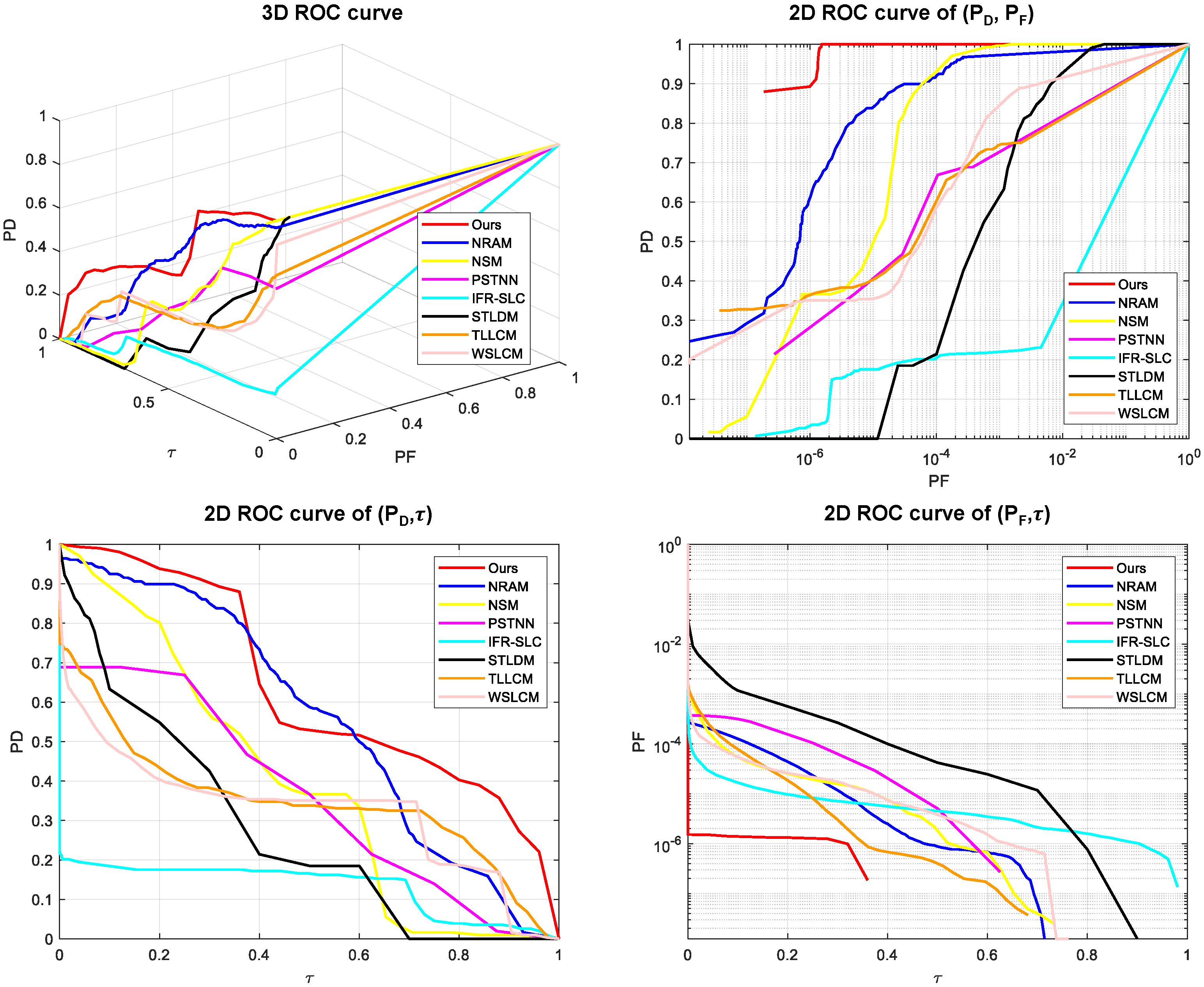
4.2. Evaluation Metrics
4.3. Comparative Experiments
5. Discussion
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Maclay, T.; Mcknight, D. Space environment management: Framing the objective and setting priorities for controlling orbital debris risk. J. Space Saf. Eng. 2021, 8, 93–97. [Google Scholar] [CrossRef]
- Kennewell, J.; Vo, B.-N. An overview of space situational awareness. In Proceedings of the 2013 16th International Conference on Information Fusion, Istanbul, Turkey, 9–12 July 2013; pp. 1029–1036. [Google Scholar]
- Wang, X.; Li, F.; Xin, L.; Ma, J.; Yang, X.; Chang, X. Moving targets detection for satellite-based surveillance video. In Proceedings of the IGARSS 2019-2019 IEEE International Geoscience and Remote Sensing Symposium, Yokohama, Japan, 28 July–2 August 2019; pp. 5492–5495. [Google Scholar]
- Su, Y.; Chen, X.; Liu, G.; Cang, C.; Rao, P. Implementation of Real-Time Space Target Detection and Tracking Algorithm for Space-Based Surveillance. Remote Sens. 2023, 15, 3156. [Google Scholar] [CrossRef]
- Zhou, D.; Wang, X. Stray Light Suppression of Wide-Field Surveillance in Complicated Situations. IEEE Access 2023, 11, 2424–2432. [Google Scholar] [CrossRef]
- Guo, X.; Chen, T.; Liu, J.; Liu, Y.; An, Q. Dim Space Target Detection via Convolutional Neural Network in Single Optical Image. IEEE Access 2022, 10, 52306–52318. [Google Scholar] [CrossRef]
- Xue, D.; Sun, J.; Hu, Y.; Zheng, Y.; Zhu, Y.; Zhang, Y. Dim small target detection based on convolutinal neural network in star image. Multimed. Tools Appl. 2020, 79, 4681–4698. [Google Scholar] [CrossRef]
- Lin, B.; Yang, X.; Wang, J.; Wang, Y.; Wang, K.; Zhang, X. A robust space target detection algorithm based on target characteristics. IEEE Geosci. Remote Sens. Lett. 2021, 19, 3080319. [Google Scholar] [CrossRef]
- Zhang, L.; Rao, P.; Hong, Y.; Chen, X.; Jia, L. Infrared Dim Star Background Suppression Method Based on Recursive Moving Target Indication. Remote Sens. 2023, 15, 4152. [Google Scholar] [CrossRef]
- Zhang, Y.; Chen, X.; Rao, P.; Jia, L. Dim Moving Multi-Target Enhancement with Strong Robustness for False Enhancement. Remote Sens. 2023, 15, 4892. [Google Scholar] [CrossRef]
- Bai, X.; Zhou, F. Analysis of new top-hat transformation and the application for infrared dim small target detection. Pattern Recognit. 2010, 43, 2145–2156. [Google Scholar] [CrossRef]
- Drummond, O.E.; Deshpande, S.D.; Er, M.H.; Venkateswarlu, R.; Chan, P. Max-mean and max-median filters for detection of small targets. In Proceedings of the Signal and Data Processing of Small Targets 1999, Orlando, FL, USA, 27–29 March 1999; pp. 74–83. [Google Scholar]
- Cao, Y.; Liu, R.; Yang, J. Small target detection using two-dimensional least mean square (TDLMS) filter based on neighborhood analysis. Int. J. Infrared Millim. Waves 2008, 29, 188–200. [Google Scholar] [CrossRef]
- Wang, C.; Wang, L. Multidirectional ring top-hat transformation for infrared small target detection. IEEE J. Sel. Topics Appl. Earth Observ. Remote Sens. 2021, 14, 8077–8088. [Google Scholar] [CrossRef]
- Li, Y.; Li, Z.; Zhang, C.; Luo, Z.; Zhu, Y.; Ding, Z.; Qin, T. Infrared maritime dim small target detection based on spatiotemporal cues and directional morphological filtering. Infrared Phys. Technol. 2021, 115, 103657. [Google Scholar] [CrossRef]
- Chen, C.P.; Li, H.; Wei, Y.; Xia, T.; Tang, Y.Y. A local contrast method for small infrared target detection. IEEE Geosci. Remote Sens. Lett. 2013, 52, 574–581. [Google Scholar] [CrossRef]
- Han, J.; Ma, Y.; Zhou, B.; Fan, F.; Liang, K.; Fang, Y. A robust infrared small target detection algorithm based on human visual system. IEEE Geosci. Remote Sens. Lett. 2014, 11, 2168–2172. [Google Scholar]
- Han, J.; Liang, K.; Zhou, B.; Zhu, X.; Zhao, J.; Zhao, L. Infrared small target detection utilizing the multiscale relative local contrast measure. IEEE Geosci. Remote Sens. Lett. 2018, 15, 612–616. [Google Scholar] [CrossRef]
- Deng, H.; Sun, X.; Liu, M.; Ye, C.; Zhou, X. Small infrared target detection based on weighted local difference measure. IEEE Geosci. Remote Sens. Lett. 2016, 54, 4204–4214. [Google Scholar] [CrossRef]
- Lu, X.; Bai, X.; Li, S.; Hei, X. Infrared Small Target Detection Based on the Weighted Double Local Contrast Measure Utilizing a Novel Window. IEEE Geosci. Remote Sens. Lett. 2022, 19, 3194602. [Google Scholar] [CrossRef]
- Wei, H.; Ma, P.; Pang, D.; Li, W.; Qian, J.; Guo, X. Weighted Local Ratio-Difference Contrast Method for Detecting an Infrared Small Target against Ground–Sky Background. Remote Sens. 2022, 14, 5636. [Google Scholar] [CrossRef]
- Lv, P.; Sun, S.; Lin, C.; Liu, G. A Method for Weak Target Detection Based on Human Visual Contrast Mechanism. IEEE Geosci. Remote Sens. Lett. 2019, 16, 261–265. [Google Scholar] [CrossRef]
- Han, J.; Moradi, S.; Faramarzi, I.; Liu, C.; Zhang, H.; Zhao, Q. A Local Contrast Method for Infrared Small-Target Detection Utilizing a Tri-Layer Window. IEEE Geosci. Remote Sens. Lett. 2020, 17, 1822–1826. [Google Scholar] [CrossRef]
- Han, J.; Moradi, S.; Faramarzi, I.; Zhang, H.; Zhao, Q.; Zhang, X.; Li, N. Infrared Small Target Detection Based on the Weighted Strengthened Local Contrast Measure. IEEE Geosci. Remote Sens. Lett. 2021, 18, 1670–1674. [Google Scholar] [CrossRef]
- Deng, L.; Zhu, H.; Tao, C.; Wei, Y. Infrared moving point target detection based on spatial–temporal local contrast filter. Infrared Phys. Technol. 2016, 76, 168–173. [Google Scholar] [CrossRef]
- Zhao, B.; Xiao, S.; Lu, H.; Wu, D. Spatial-temporal local contrast for moving point target detection in space-based infrared imaging system. Infrared Phys. Technol. 2018, 95, 53–60. [Google Scholar] [CrossRef]
- Chen, L.; Chen, X.; Rao, P.; Guo, L.; Huang, M. Space-based infrared aerial target detection method via interframe registration and spatial local contrast. Opt. Lasers Eng. 2022, 158, 107131. [Google Scholar] [CrossRef]
- Du, P.; Hamdulla, A. Infrared Moving Small-Target Detection Using Spatial–Temporal Local Difference Measure. IEEE Geosci. Remote Sens. Lett. 2020, 17, 1817–1821. [Google Scholar] [CrossRef]
- Gao, C.; Meng, D.; Yang, Y.; Wang, Y.; Zhou, X.; Hauptmann, A.G. Infrared patch-image model for small target detection in a single image. IEEE Trans. Image Process. 2013, 22, 4996–5009. [Google Scholar] [CrossRef]
- Zhang, L.; Peng, L.; Zhang, T.; Cao, S.; Peng, Z. Infrared Small Target Detection via Non-Convex Rank Approximation Minimization Joint l2,1 Norm. Remote Sens. 2018, 10, 1821. [Google Scholar] [CrossRef]
- Zhang, L.; Peng, Z. Infrared Small Target Detection Based on Partial Sum of the Tensor Nuclear Norm. Remote Sens. 2019, 11, 382. [Google Scholar] [CrossRef]
- Yi, H.; Yang, C.; Qie, R.; Liao, J.; Wu, F.; Pu, T.; Peng, Z. Spatial-Temporal Tensor Ring Norm Regularization for Infrared Small Target Detection. IEEE Geosci. Remote Sens. Lett. 2023, 20, 3236030. [Google Scholar] [CrossRef]
- Hu, Y.; Ma, Y.; Pan, Z.; Liu, Y. Infrared Dim and Small Target Detection from Complex Scenes via Multi-Frame Spatial–Temporal Patch-Tensor Model. Remote Sens. 2022, 14, 2234. [Google Scholar] [CrossRef]
- Zhang, P.; Zhang, L.; Wang, X.; Shen, F.; Pu, T.; Fei, C. Edge and Corner Awareness-Based Spatial–Temporal Tensor Model for Infrared Small-Target Detection. IEEE Geosci. Remote Sens. Lett. 2021, 59, 10708–10724. [Google Scholar] [CrossRef]
- Wu, F.; Yu, H.; Liu, A.; Luo, J.; Peng, Z. Infrared Small Target Detection Using Spatiotemporal 4-D Tensor Train and Ring Unfolding. IEEE Geosci. Remote Sens. Lett. 2023, 61, 3288024. [Google Scholar] [CrossRef]
- Chen, Y.; Li, L.; Liu, X.; Su, X. A Multi-Task Framework for Infrared Small Target Detection and Segmentation. IEEE Geosci. Remote Sens. Lett. 2022, 60, 3195740. [Google Scholar] [CrossRef]
- Qi, M.; Liu, L.; Zhuang, S.; Liu, Y.; Li, K.; Yang, Y.; Li, X. FTC-net: Fusion of transformer and CNN features for infrared small target detection. IEEE J. Sel. Topics Appl. Earth Observ. Remote Sens. 2022, 15, 8613–8623. [Google Scholar] [CrossRef]
- Du, J.; Lu, H.; Zhang, L.; Hu, M.; Chen, S.; Deng, Y.; Shen, X.; Zhang, Y. A Spatial-Temporal Feature-Based Detection Framework for Infrared Dim Small Target. IEEE Geosci. Remote Sens. Lett. 2022, 60, 3117131. [Google Scholar] [CrossRef]
- Wang, P.; Niu, W.; Gao, W.; Guo, Y.; Peng, X. Dim Moving Point Target Detection in Cloud Clutter Scenes Based on Temporal Profile Learning. IEEE Geosci. Remote Sens. Lett. 2023, 20, 3281353. [Google Scholar] [CrossRef]
- Chang, C.-I. An effective evaluation tool for hyperspectral target detection: 3D receiver operating characteristic curve analysis. IEEE Geosci. Remote Sens. Lett. 2020, 59, 5131–5153. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| The Method Category | The Detection Method |
|---|---|
| Image filtering-based | Top-Hat [11], Max–Mean and Max–Median [12], 2D Least Mean Square (TDLMS) filter [13], multi-directional ring top-hat (MDRTH) [14], and Multi-directional Improved Top-Hat Filter (MITHF) [15]. |
| Single-frame Human visual system-based | LCM [16], Improved LCM (ILCM) [17], Relative LCM (RLCM) [18], Weighted LCM (WLDM) [19], Weighted Double LCM (WDLCM) [20], Weighted Local Ratio-Difference Contrast Method (WLRDCM) [21], Neighborhood Saliency Map (NSM) [22], multi-scale Tri-Layer LCM (TLLCM) [23], and Weighted Strengthened LCM (WSLCM) [24]. |
| Temporal human visual system-based | Spatial–Temporal Local Contrast Filter (STLCF) [25], Spatial–Temporal LCM (STLCM) [26], Interframe Registration and Spatial Local Contrast (IFR-SLC)-based method [27], Spatial–Temporal Local Difference Measure (STLDM) [28]. |
| Single-frame optimization-based | Infrared Patch-Image (IPI) [29], NRAM [30], PSTNN [31]. |
| Temporal optimization-based | Spatial–Temporal Tensor Ring Norm Regularization (STT-TRNR) [32], Multi-Frame Spatial–Temporal Patch-Tensor Model (MFSTPT) [33], Edge and Corner Awareness-Based Spatial–Temporal Tensor (ECA-STT) Model [34], Spatiotemporal 4D Tensor Train and Ring Unfolding (4-DTTRU) [35]. |
| The deep learning method | Multi-task UNet (MTUNet) framework [36], FTC-Net [37], Region Proposal Network and Regions of Interest (RPN-ROI) network [38], ConvBlock-1-D framework [39]. |
| Datasets | Frame | Image Resolution | Average SCR | Scene Description |
|---|---|---|---|---|
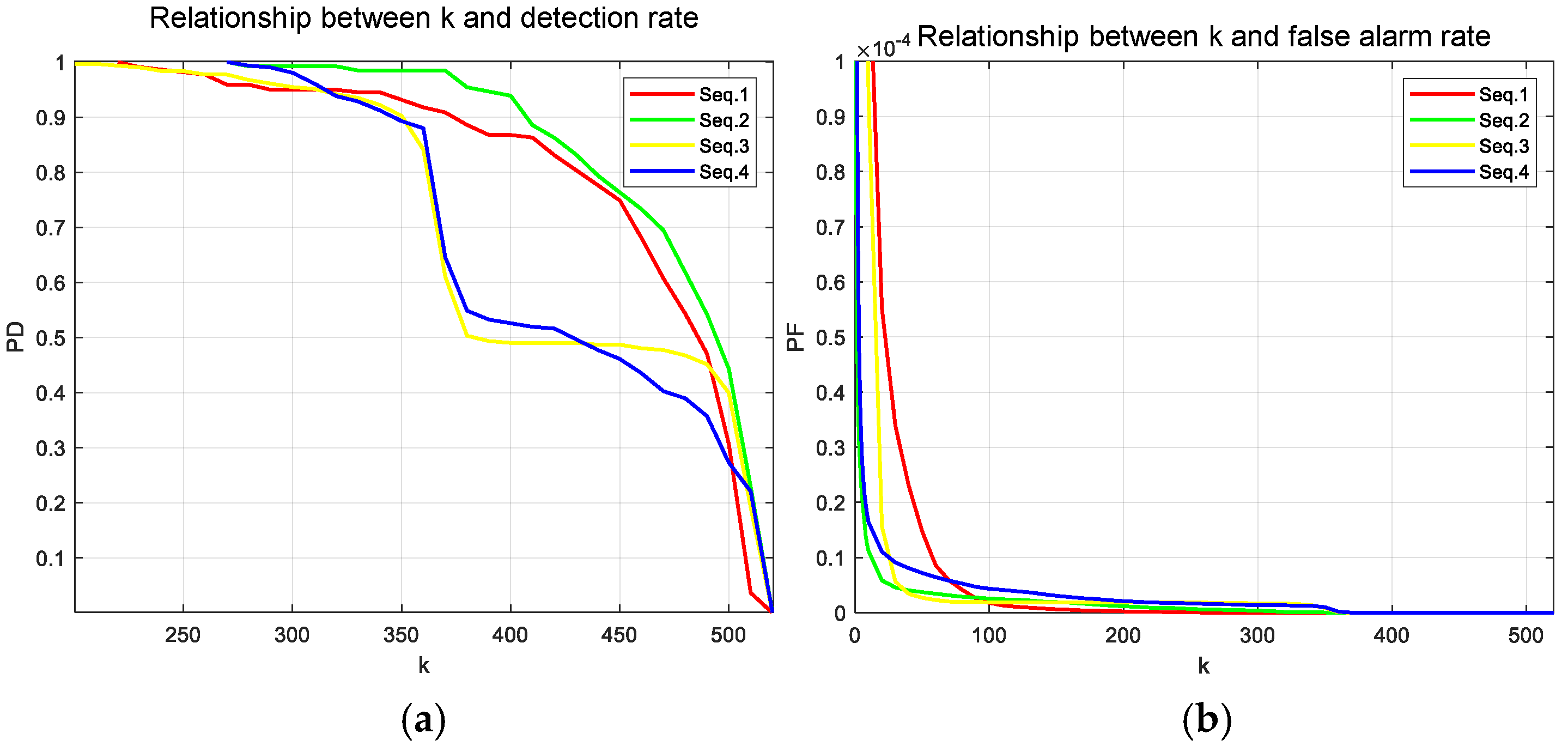
| Seq.1 | 210 | 512 512 | 2.78 | Bright ground; strong clutter; background speed is 1 pixel/frame; the target speed is 2 pixels/frame. |
| Seq.2 | 130 | 512 512 | 3.61 | Heavy cloud; non-uniform stripe; background speed is 1 pixel/frame; the target speed is 0.7 pixels/frame. |
| Seq.3 | 300 | 512 512 | 2.58 | Fragmented cloud; bright-spot noise; background speed is 0.24 pixel/frame; the target speed is 1.4 pixels/frame. |
| Seq.4 | 300 | 512 512 | 2.79 | Bright ground; strong clutter; background speed is 0.3 pixel/frame; the target speed is 1.4 pixels/frame. |
| Methods | Parameter Settings |
|---|---|
| NRAM [30] | Path size: , sliding step: , , , , |
| NSM [22] | Window size: . |
| PSTNN [31] | Path size: , sliding step: , , |
| IFR-SLC [27] | Window size: , |
| STLDM [28] | Subblock size: , |
| TLLCM [23] | Cell size: , , and |
| WSLCM [24] | Cell size: , , and |
| Ours | Matching block size: , , frame interval: |
| Method | Seq.1 | |||||||
| NRAM | 0.9994 | 0.3841 | 8.73 × 10−5 | 1.3835 | 0.9994 | 0.3840 | 1.3835 | 4.39 × 103 |
| NSM | 0.9998 | 0.2250 | 2.01 × 10−5 | 1.2248 | 0.9998 | 0.2250 | 1.2248 | 1.11 × 104 |
| PSTNN | 0.8942 | 0.6000 | 9.35 × 10−4 | 1.4942 | 0.8933 | 0.5991 | 1.4933 | 6.41 × 102 |
| IFR-SLC | 0.9871 | 0.7212 | 1.08 × 10−5 | 1.7083 | 0.9871 | 0.7212 | 1.7083 | 6.64 × 104 |
| STLDM | 0.9748 | 0.0699 | 5.44 × 10−4 | 1.0447 | 0.9743 | 0.0694 | 1.0442 | 1.28 × 102 |
| TLLCM | 0.8105 | 0.0899 | 1.54 × 10−4 | 0.9004 | 0.8104 | 0.0897 | 0.9002 | 5.80 × 102 |
| WSLCM | 0.8916 | 0.0222 | 5.74 × 10−5 | 0.9138 | 0.8915 | 0.0221 | 0.9137 | 3.86 × 102 |
| Ours | 1.0000 | 0.8030 | 1.30 × 10−8 | 1.8030 | 1.0000 | 0.8030 | 1.8030 | 6.14 × 107 |
| Method | Seq.2 | |||||||
| NRAM | 0.9999 | 0.2007 | 3.88 × 10−6 | 1.2006 | 0.9999 | 0.2007 | 1.2006 | 5.17 × 104 |
| NSM | 0.9999 | 0.2790 | 1.06 × 10−5 | 1.2790 | 0.9999 | 0.2790 | 1.2789 | 2.62 × 104 |
| PSTNN | 0.9982 | 0.2631 | 1.84 × 10−4 | 1.2613 | 0.9980 | 0.2629 | 1.2611 | 1.42 × 103 |
| IFR-SLC | 0.5047 | 0.0000 | 1.07 × 10−5 | 0.5047 | 0.5047 | 0.0000 | 0.5047 | 0.1665 |
| STLDM | 0.9826 | 0.4727 | 4.44 × 10−4 | 1.4553 | 0.9822 | 0.4723 | 1.4549 | 1.06 × 103 |
| TLLCM | 0.9954 | 0.3500 | 2.13 × 10−4 | 1.3455 | 0.9952 | 0.3498 | 1.3453 | 1.64 × 103 |
| WSLCM | 0.9999 | 0.3028 | 1.21 × 10−5 | 1.3026 | 0.9998 | 0.3028 | 1.3026 | 2.49 × 104 |
| Ours | 1.0000 | 0.8249 | 8.67 × 10−8 | 1.8249 | 1.0000 | 0.8249 | 1.8249 | 9.50 × 106 |
| Method | Seq.3 | |||||||
| NRAM | 1.0000 | 0.5914 | 5.19 × 10−7 | 1.5914 | 1.0000 | 0.5914 | 1.5914 | 1.13 × 106 |
| NSM | 0.9999 | 0.4872 | 1.30 × 10−5 | 1.4872 | 0.9999 | 0.4872 | 1.4872 | 3.74 × 104 |
| PSTNN | 0.9377 | 0.4902 | 1.77 × 10−4 | 1.4279 | 0.9375 | 0.4900 | 1.4277 | 2.75 × 103 |
| IFR-SLC | 0.5671 | 0.0155 | 1.11 × 10−5 | 0.5826 | 0.5671 | 0.0155 | 0.5826 | 1.38 × 103 |
| STLDM | 0.9914 | 0.3218 | 1.24 × 10−3 | 1.3131 | 0.9901 | 0.3205 | 1.3119 | 259.452 |
| TLLCM | 0.9781 | 0.1868 | 2.97 × 10−4 | 1.1649 | 0.9778 | 0.1865 | 1.1646 | 627.105 |
| WSLCM | 0.9941 | 0.0318 | 1.21 × 10−4 | 1.0260 | 0.9940 | 0.0317 | 1.0258 | 262.502 |
| Ours | 1.0000 | 0.7799 | 1.07 × 10−6 | 1.7799 | 1.0000 | 0.7799 | 1.7799 | 7.26 × 105 |
| Method | Seq.4 | |||||||
| NRAM | 0.9837 | 0.5559 | 3.07 × 10−5 | 1.5396 | 0.9837 | 0.5558 | 1.5395 | 1.80 × 104 |
| NSM | 0.9998 | 0.3904 | 3.47 × 10−5 | 1.3902 | 0.9998 | 0.3903 | 1.3902 | 1.12 × 104 |
| PSTNN | 0.8438 | 0.3636 | 7.77 × 10−5 | 1.2074 | 0.8437 | 0.3636 | 1.2073 | 4.67 × 103 |
| IFR-SLC | 0.6064 | 0.1319 | 8.71 × 10−6 | 0.7383 | 0.6064 | 0.1319 | 0.7383 | 1.51 × 104 |
| STLDM | 0.9867 | 0.2691 | 6.65 × 10−4 | 1.2558 | 0.9861 | 0.2684 | 1.2552 | 404.262 |
| TLLCM | 0.8733 | 0.3470 | 3.88 × 10−5 | 1.2203 | 0.8733 | 0.3469 | 1.2203 | 8.94 × 103 |
| WSLCM | 0.9433 | 0.3240 | 2.30 × 10−5 | 1.2673 | 0.9433 | 0.3240 | 1.2673 | 1.40 × 104 |
| Ours | 1.0000 | 0.6312 | 4.57 × 10−7 | 1.6312 | 1.0000 | 0.6312 | 1.6312 | 1.37 × 106 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Su, Y.; Chen, X.; Cang, C.; Li, F.; Rao, P. A Space Target Detection Method Based on Spatial–Temporal Local Registration in Complicated Backgrounds. Remote Sens. 2024, 16, 669. https://doi.org/10.3390/rs16040669
Su Y, Chen X, Cang C, Li F, Rao P. A Space Target Detection Method Based on Spatial–Temporal Local Registration in Complicated Backgrounds. Remote Sensing. 2024; 16(4):669. https://doi.org/10.3390/rs16040669
Chicago/Turabian StyleSu, Yueqi, Xin Chen, Chen Cang, Fenghong Li, and Peng Rao. 2024. "A Space Target Detection Method Based on Spatial–Temporal Local Registration in Complicated Backgrounds" Remote Sensing 16, no. 4: 669. https://doi.org/10.3390/rs16040669
APA StyleSu, Y., Chen, X., Cang, C., Li, F., & Rao, P. (2024). A Space Target Detection Method Based on Spatial–Temporal Local Registration in Complicated Backgrounds. Remote Sensing, 16(4), 669. https://doi.org/10.3390/rs16040669