

Synthetic Aperture Ladar Motion Compensation Method Based on Symmetric Triangle Linear Frequency Modulation Continuous Wave Segmented Interference
 ,
, 
Abstract
:
1. Introduction
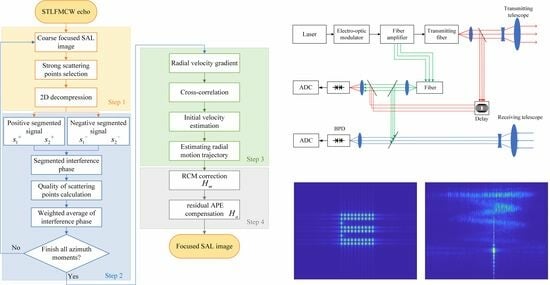
- This article develops a motion error estimation method based on segmented interference of triangular-wave-positive and -negative frequency-modulated dechirp signals, which does not require system design changes and only requires one period of dechirp signal;
- Innovatively proposed an initial phase estimation method based on range compression envelope cross-correlation between positive and negative frequency modulation signals;
- An interferometric phase extraction method based on interferometric phase gradient integration is proposed, which solves the problem of interferometric phase wrapping caused by the extremely short laser wavelength.
2. Materials and Methods
2.1. FMCW SAL System
2.2. Analysis of Motion Error in Positive and Negative Frequency Modulation Signals of STLFMCW
2.3. A Motion Error Compensation Method Based on Segmented Interference
2.3.1. Segmented Interference Signal Model
2.3.2. Initial Phase Estimation
2.3.3. RCM Correction and Residual Azimuth Phase Error Compensation
2.4. Algorithm Flow
3. Results and Discussion
3.1. Point Targets Simulation Experiment
3.1.1. Experimental Setup
3.1.2. Experimental Result
3.2. Area Target Experiment
3.2.1. Experimental Setup
3.2.2. Experimental Result
3.3. Ground ISAL Experiment
3.3.1. Experimental Setup
3.3.2. Experimental Result
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Bashkansky, M.; Lucke, R.L.; Funk, E.E.; Reintjes, J.F.; Rickard, L.J. Synthetic aperture imaging at 1.5 um: Laboratory demonstration and potential application to planet surface studies. In Proceedings of the Highly Innovative Space Telescope Concepts, Waikoloa, HI, USA, 22–23 August 2002; SPIE: Bellingham, WA, USA, 2002; Volume 4849, pp. 48–56. [Google Scholar]
- Abdukirim, A.; Ren, Y.; Tao, Z.; Liu, S.; Li, Y.; Deng, H.; Rao, R. Effects of Atmospheric Coherent Time on Inverse Synthetic Aperture Ladar Imaging through Atmospheric Turbulence. Remote Sens. 2023, 15, 2883. [Google Scholar] [CrossRef]
- Karr, T.J. Resolution of synthetic-aperture imaging through turbulence. JOSA A 2003, 20, 1067–1083. [Google Scholar] [CrossRef]
- Turbide, S.; Marchese, L.; Terroux, M.; Bergeron, A. Synthetic aperture lidar as a future tool for earth observation. In Proceedings of the International Conference on Space Optics—ICSO, Tenerife, Spain, 6–10 October 2014; SPIE: Bellingham, WA, USA, 2017; Volume 10563, pp. 1115–1122. [Google Scholar]
- Nelson, R.; Oderwald, R.; Gregoire, T.G. Separating the ground and airborne laser sampling phases to estimate tropical forest basal area, volume, and biomass. Remote Sens. Environ. 1997, 60, 311–326. [Google Scholar] [CrossRef]
- Lv, Y.; Wu, Y.; Wang, H.; Qiu, L.; Jiang, J.; Sun, Y. An Inverse Synthetic Aperture Ladar Imaging Algorithm of Maneuvering Target Based on Integral Cubic Phase Function-Fractional Fourier Transform. Electronics 2018, 7, 148. [Google Scholar] [CrossRef]
- Guo, L.; Yin, H.; Zeng, X.; Xing, M.; Tang, Y. Analysis of airborne synthetic aperture ladar imaging with platform vibration. Optik 2017, 140, 171–177. [Google Scholar] [CrossRef]
- Bashkansky, M.; Lucke, R.L.; Funk, E.; Rickard, L.; Reintjes, J. Two-dimensional synthetic aperture imaging in the optical domain. Opt. Lett. 2002, 27, 1983–1985. [Google Scholar] [CrossRef] [PubMed]
- Karr, T.J. Atmospheric Phase Error in Coherent Laser Radar. IEEE Trans. Antennas Propag. 2007, 55, 1122–1133. [Google Scholar] [CrossRef]
- Depoy, R.S.; Shaw, A.K. Algorithm to overcome atmospheric phase errors in SAL data. Appl. Opt. 2020, 59, 140–150. [Google Scholar] [CrossRef] [PubMed]
- Hua, Z.; Li, H.; Gu, Y. Atmosphere turbulence phase compensation in synthetic aperture ladar data processing. In Proceedings of the MIPPR 2007: Multispectral Image Processing, Wuhan, China, 15–17 November 2007; SPIE: Bellingham, WA, USA, 2007; Volume 6787, pp. 560–566. [Google Scholar]
- Lv, Y.k.; Wu, Y.h. Development and key technologies of synthetic aperture ladar imaging. Laser Optoelectron. Prog. 2017, 54, 43–59. [Google Scholar]
- Gatt, P.; Jacob, D.; Bradford, B.; Marron, J.; Krause, B. Performance bounds of the phase gradient autofocus algorithm for synthetic aperture ladar. In Proceedings of the Laser Radar Technology and Applications XIV, Orlando, FL, USA, 15–16 April 2009; SPIE: Bellingham, WA, USA, 2009; Volume 7323, pp. 187–195. [Google Scholar]
- Attia, E.H. Data-adaptive motion compensation for synthetic aperture LADAR. In Proceedings of the 2004 IEEE Aerospace Conference Proceedings, Big Sky, MT, USA, 6–13 March 2004; IEEE Cat. No. 04TH8720. IEEE: New York, NY, USA, 2004; Volume 3, pp. 1782–1787. [Google Scholar]
- Stappaerts, E.A.; Scharlemann, E.T. Differential synthetic aperture ladar. Opt. Lett. 2005, 30, 2385–2387. [Google Scholar] [CrossRef]
- Ma, M.; Li, D.; Du, J. Imaging of airborne synthetic aperture ladar under platform vibration condition. J. Radars 2014, 3, 591. [Google Scholar] [CrossRef]
- Wang, S.; Wang, B.; Xiang, M.; Sun, X.; Xu, W.; Wu, Y. Synthetic aperture ladar motion compensation method based on symmetrical triangular linear frequency modulation continuous wave. Opt. Commun. 2020, 471, 125901. [Google Scholar] [CrossRef]
- Stove, A.G. Linear FMCW radar techniques. IEE Proc. F (Radar Signal Process.) 1992, 193, 343–350. [Google Scholar] [CrossRef]
- Pierrottet, D.; Amzajerdian, F.; Petway, L.; Barnes, B.; Lockard, G.; Rubio, M. Linear FMCW laser radar for precision range and vector velocity measurements. MRS Online Proc. Libr. (OPL) 2008, 1076, 1076-K04. [Google Scholar] [CrossRef]
- Amzajerdian, F.; Pierrottet, D.; Petway, L.; Hines, G.; Roback, V. Lidar systems for precision navigation and safe landing on planetary bodies. In Proceedings of the International Symposium on Photoelectronic Detection and Imaging 2011: Laser Sensing and Imaging; and Biological and Medical Applications of Photonics Sensing and Imaging, Beijing, China, 24–26 May 2011; SPIE: Bellingham, WA, USA, 2011; Volume 8192, pp. 27–33. [Google Scholar]
- Amzajerdian, F.; Hines, G.D.; Pierrottet, D.F.; Barnes, B.W.; Petway, L.B.; Carson III, J.M. Demonstration of coherent Doppler lidar for navigation in GPS-denied environments. In Proceedings of the Laser Radar Technology and Applications XXII, Anaheim, CA, USA, 11–12 April 2017; SPIE: Bellingham, WA, USA, 2017; Volume 10191, p. 1019102. [Google Scholar]
- Pierrottet, D.; Amzajerdian, F.; Petway, L.; Barnes, B.; Lockard, G.; Hines, G. Navigation Doppler Lidar sensor for precision altitude and vector velocity measurements: Flight test results. In Proceedings of the Sensors and Systems for Space Applications IV, Orlando, FL, USA, 25–26 April 2011; SPIE: Bellingham, WA, USA, 2011; Volume 8044, pp. 240–250. [Google Scholar]
- Bingnan, W.; Juanying, Z.; Wei, L.; Ruihua, S.; Maosheng, X.; Yu, Z.; Jianjun, J. Array Synthetic Aperture Ladar with High Spatial Resolution Technology. J. Radars 2022, 11, 1110–1118. [Google Scholar]
- Mengmeng, X.; Yu, Z.; Jianfeng, S.; Zhiyong, L.; Chenzhe, L.; Hongyu, H.; Yuexin, L. Generation of linear frequency modulation laser source with broadband narrow linewidth using optical phase modulator. Infrared Laser Eng. 2020, 49, 0205004. [Google Scholar] [CrossRef]
- Li, G.; Wang, N.; Wang, R.; Zhang, K.; Wu, Y. Imaging method for airborne SAL data. Electron. Lett. 2017, 53, 351–353. [Google Scholar] [CrossRef]
- Cumming, I.G.; Wong, F.H. Digital processing of synthetic aperture radar data. Artech House 2005, 1, 108–110. [Google Scholar]
- Berizzi, F.; Corsini, G.; Diani, M.; Veltroni, M. Autofocus of wide azimuth angle SAR images by contrast optimisation. In Proceedings of the IGARSS’96. 1996 International Geoscience and Remote Sensing Symposium, Lincoln, NE, USA, 31–31 May 1996; IEEE: New York, NY, USA, 1996; Volume 2, pp. 1230–1232. [Google Scholar]
- Yakun, L.; Yanhong, W.; Hongyan, W.; Shiqiang, S. Phase errors compensation algorithm of inverse synthetic aperture ladar based on CS-Fmea. In Proceedings of the 2017 3rd IEEE International Conference on Computer and Communications (ICCC), Chengdu, China, 13–16 December 2017; IEEE: New York, NY, USA, 2017; pp. 1313–1317. [Google Scholar]
- Turbide, S.; Marchese, L.; Terroux, M.; Bergeron, A. Investigation of synthetic aperture ladar for land surveillance applications. In Proceedings of the Electro-Optical Remote Sensing, Photonic Technologies, and Applications VII; and Military Applications in Hyperspectral Imaging and High Spatial Resolution Sensing, Dresden, Germany, 24–26 September 2013; SPIE: Bellingham, WA, USA, 2013; Volume 8897, pp. 68–75. [Google Scholar]




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Waveform of Ladar | Laser Wavelength | Bandwidth | PRT | Velocity | Platform Height |
|---|---|---|---|---|---|
| STLFMCW | 1.55 μm | 5 GHz | 16 μs | 60 m/s | 3000 m |
| IRW (m) | PSLR (dB) | ISLR (dB) | |
|---|---|---|---|
| Range | 0.030 | −13.23 | −12.26 |
| Azimuth | 0.006 | −12.49 | −11.98 |
| Original | Cross-Correlation | Proposed Method | |
|---|---|---|---|
| Entropy | 11.4919 | 11.4081 | 11.3471 |
| Contrast | 0.2375 | 0.3146 | 0.3433 |
| Parameters | Values |
|---|---|
| Waveform of Ladar | Triangular FMCW |
| Laser Wavelength | 1.55 μm |
| Bandwidth | 5 GHz |
| PRT | 32 μs |
| Operating Range | 4350 m |
| Incident Angle | 45° |
| Range Cell | 0.03 m |
| Azimuth Cell | 0.0001 m |
| Reference Range | 4339.5 m |
| Beam Width | 120 μrad × 30 μrad |
| Original | Cross-Correlation | Proposed Method | |
|---|---|---|---|
| Entropy | 13.0434 | 12.0239 | 11.9251 |
| Contrast | 0.3207 | 0.3300 | 0.4100 |
| IRW (m) | PSLR (dB) | ISLR (dB) | ||||
|---|---|---|---|---|---|---|
| Cross-Correlation | Proposed | Cross-Correlation | Proposed | Cross-Correlation | Proposed | |
| Range | 0.030 | 0.030 | −10.36 | −14.00 | −9.92 | −13.20 |
| Azimuth | 0.0080 | 0.0078 | −5.01 | −13.77 | −3.86 | −12.78 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shi, R.; Li, W.; Dong, Q.; Wang, B.; Xiang, M.; Wang, Y. Synthetic Aperture Ladar Motion Compensation Method Based on Symmetric Triangle Linear Frequency Modulation Continuous Wave Segmented Interference. Remote Sens. 2024, 16, 793. https://doi.org/10.3390/rs16050793
Shi R, Li W, Dong Q, Wang B, Xiang M, Wang Y. Synthetic Aperture Ladar Motion Compensation Method Based on Symmetric Triangle Linear Frequency Modulation Continuous Wave Segmented Interference. Remote Sensing. 2024; 16(5):793. https://doi.org/10.3390/rs16050793
Chicago/Turabian StyleShi, Ruihua, Wei Li, Qinghai Dong, Bingnan Wang, Maosheng Xiang, and Yinshen Wang. 2024. "Synthetic Aperture Ladar Motion Compensation Method Based on Symmetric Triangle Linear Frequency Modulation Continuous Wave Segmented Interference" Remote Sensing 16, no. 5: 793. https://doi.org/10.3390/rs16050793
APA StyleShi, R., Li, W., Dong, Q., Wang, B., Xiang, M., & Wang, Y. (2024). Synthetic Aperture Ladar Motion Compensation Method Based on Symmetric Triangle Linear Frequency Modulation Continuous Wave Segmented Interference. Remote Sensing, 16(5), 793. https://doi.org/10.3390/rs16050793