
Three-Dimensional Signal Source Localization with Angle-Only Measurements in Passive Sensor Networks


Abstract
:1. Introduction
- (1)
- We present an intersection localization method with angle-only measurements in a passive sensor network. The presented intersection localization method has the same target position solution as the widely used and computationally efficient LS method but has a lower computational cost.
- (2)
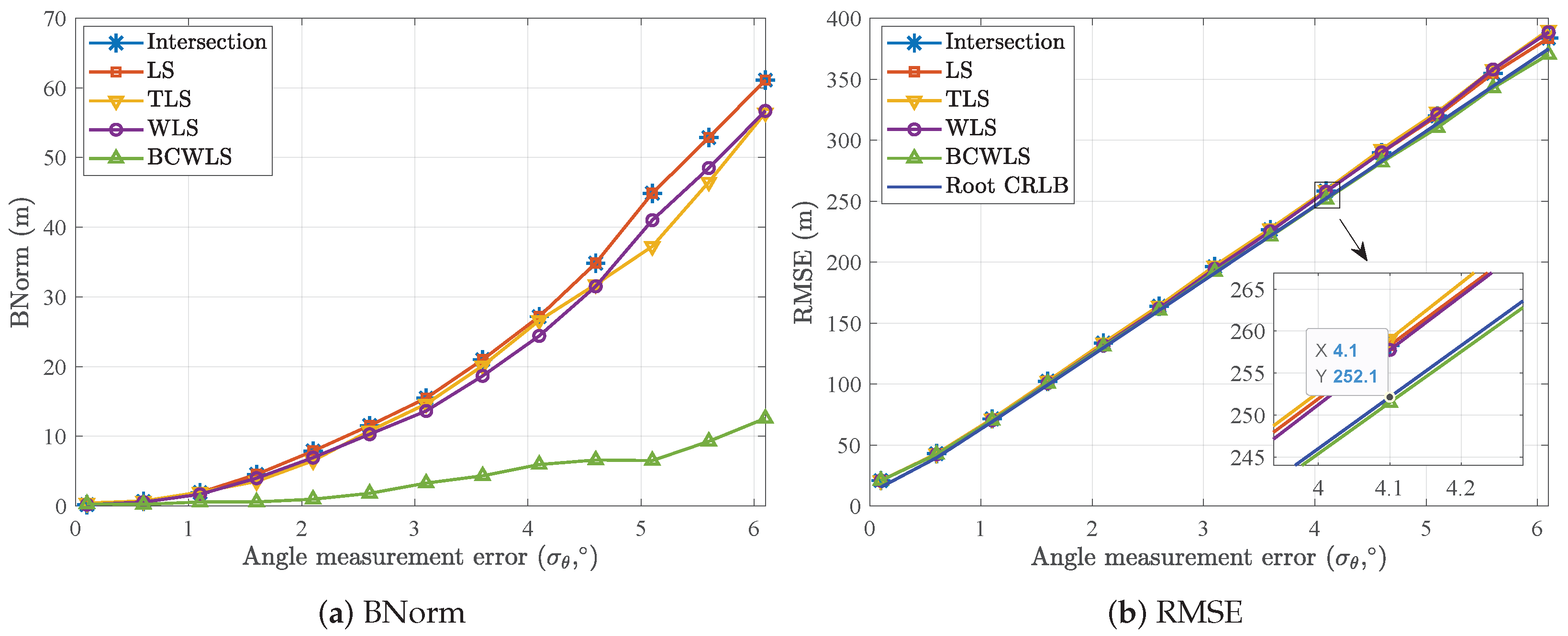
- We present a bias computation WLS estimator for target localization using angle-only measurements. The presented method can compensate for the positioning bias of the WLS method, thereby improving the accuracy of the target position estimate.
- (3)
- We derive the CRLB for estimating the target position under the condition of sensor self-positioning error. Numerical simulations evaluate the superiority of the intersection localization method in terms of computational cost and the superiority of the BCWLS method in terms of localization accuracy.
2. Materials and Methods
2.1. Signal Model of Angle-Only Measurements
2.2. Intersection Localization Method
2.3. Least-Squares Method
2.4. Total Least-Squares Method
2.5. Weighted Least-Squares Method
2.6. Bias-Compensation WLS Method
2.7. Cramér–Rao Lower Bound
3. Results
3.1. Statistical Metrics
3.2. The Impacts of Sensor Self-Positioning Noise and Angle Measurement Noise
3.3. The Impact of the Number of Sensors
3.4. The Computational Cost
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Olson, E.; Leonard, J.J.; Teller, S. Robust Range-Only Beacon Localization. IEEE J. Ocean. Eng. 2006, 31, 949–958. [Google Scholar] [CrossRef]
- Hamdollahzadeh, M.; Amiri, R.; Behnia, F. Moving Target Localization in Bistatic Forward Scatter Radars: Performance Study and Efficient Estimators. IEEE Trans. Aerosp. Electron. Syst. 2020, 56, 1582–1594. [Google Scholar] [CrossRef]
- Sadeghi, M.; Behnia, F.; Amiri, R.; Farina, A. Target Localization Geometry Gain in Distributed MIMO Radar. IEEE Trans. Signal Process. 2021, 69, 1642–1652. [Google Scholar] [CrossRef]
- Famoriji, O.J.; Shongwe, T. Source Localization of EM Waves in the Near-Field of Spherical Antenna Array in the Presence of Unknown Mutual Coupling. Wirel. Commun. Mob. Comput. 2021, 2021, 3237219. [Google Scholar] [CrossRef]
- Wang, C.L.; Yang, R.J. Research on Airborne Infrared Passive Location Method Based on Orthogonal Multi-station Triangulation. Laser Infrared 2007, 11, 1184–1187+1191. [Google Scholar]
- Kazemi, S.A.R.; Amiri, R.; Behnia, F. Efficient Closed-Form Solution for 3-D Hybrid Localization in Multistatic Radars. IEEE Trans. Aerosp. Electron. Syst. 2021, 57, 3886–3895. [Google Scholar] [CrossRef]
- Yang, J.; Liu, C.; Huang, J.; Hu, D.; Zhao, C. Overcoming Unknown Measurement Noise Powers in Multistatic Target Localization: A Cyclic Minimization and Joint Estimation Algorithm. Radioengineering 2023, 32, 415–424. [Google Scholar] [CrossRef]
- Wang, Y.; Ho, K.C. An Asymptotically Efficient Estimator in Closed-Form for 3-D AOA Localization Using a Sensor Network. IEEE Trans. Wirel. Commun. 2015, 14, 6524–6535. [Google Scholar] [CrossRef]
- Bai, G.; Liu, J.; Song, Y.; Zuo, Y. Two-UAV Intersection Localization System Based on the Airborne Optoelectronic Platform. Sensors 2017, 17, 98. [Google Scholar] [CrossRef]
- Peng, S.; Zhao, Q.; Ma, Y.; Jiang, J. Research on the technology of cooperative dual-station position based on passive radar system. In Proceedings of the 2020 3rd International Conference on Unmanned Systems (ICUS), Harbin, China, 27–28 November 2020; pp. 611–614. [Google Scholar] [CrossRef]
- Chen, Y.; Wang, L.; Zhou, S.; Chen, R. Signal Source Positioning Based on Angle-Only Measurements in Passive Sensor Networks. Sensors 2022, 22, 1554. [Google Scholar] [CrossRef]
- Doğançay, K. 3D Pseudolinear Target Motion Analysis From Angle Measurements. IEEE Trans. Signal Process. 2015, 63, 1570–1580. [Google Scholar] [CrossRef]
- Nguyen, N.H.; Doğançay, K.; Kuruoglu, E.E. An Iteratively Reweighted Instrumental-Variable Estimator for Robust 3-D AOA Localization in Impulsive Noise. IEEE Trans. Signal Process. 2019, 67, 4795–4808. [Google Scholar] [CrossRef]
- Jia, T.; Wang, H.; Shen, X.; Jiang, Z.; He, K. Target localization based on structured total least squares with hybrid TDOA-AOA measurements. Signal Process. 2018, 143, 211–221. [Google Scholar] [CrossRef]
- Wells, D.E.; Krakiwsky, E.J. The Method of Least Squares; Department of Surveying Engineering, University of New Brunswick Canada: Fredericton, NB, Canada, 1971; Volume 18. [Google Scholar]
- Doğançay, K. On the bias of linear least squares algorithms for passive target localization. Signal Process. 2004, 84, 475–486. [Google Scholar] [CrossRef]
- Doğançay, K. Bearings-only target localization using total least squares. Signal Process. 2005, 85, 1695–1710. [Google Scholar] [CrossRef]
- Golub, G.H.; van Loan, C.F. An Analysis of the Total Least Squares Problem. SIAM J. Numer. Anal. 1980, 17, 883–893. [Google Scholar] [CrossRef]
- Markovsky, I.; Van Huffel, S. Overview of total least-squares methods. Signal Process. 2007, 87, 2283–2302. [Google Scholar] [CrossRef]
- Dogancay, K. Relationship Between Geometric Translations and TLS Estimation Bias in Bearings-Only Target Localization. IEEE Trans. Signal Process. 2008, 56, 1005–1017. [Google Scholar] [CrossRef]
- Wu, W.; Jiang, J.; Fan, X.; Zhou, Z. Performance analysis of passive location by two airborne platforms with angle-only measurements in WGS-84. Infrared Laser Eng. 2015, 44, 654–661. [Google Scholar]
- Frew, E.W. Sensitivity of cooperative target geolocalization to orbit coordination. J. Guid. Control. Dyn. 2008, 31, 1028–1040. [Google Scholar] [CrossRef]
- Zhang, Y.; Li, Y.; Qi, G.; Sheng, A. Cooperative Target Localization and Tracking with Incomplete Measurements. Int. J. Distrib. Sens. Netw. 2014, 2014. [Google Scholar] [CrossRef]
- Pang, F.; Doğançay, K.; Nguyen, N.H.; Zhang, Q. AOA Pseudolinear Target Motion Analysis in the Presence of Sensor Location Errors. IEEE Trans. Signal Process. 2020, 68, 3385–3399. [Google Scholar] [CrossRef]
- Ghaderpour, E.; Antonielli, B.; Bozzano, F.; Scarascia Mugnozza, G.; Mazzanti, P. A fast and robust method for detecting trend turning points in InSAR displacement time series. Comput. Geosci. 2024, 185, 105546. [Google Scholar] [CrossRef]
- Hu, J.; Li, Z.; Ding, X.; Zhu, J.; Sun, Q. Spatial–temporal surface deformation of Los Angeles over 2003–2007 from weighted least squares DInSAR. Int. J. Appl. Earth Obs. Geoinf. 2013, 21, 484–492. [Google Scholar] [CrossRef]
- Sun, Y.; Ho, K.C.; Wan, Q. Eigenspace Solution for AOA Localization in Modified Polar Representation. IEEE Trans. Signal Process. 2020, 68, 2256–2271. [Google Scholar] [CrossRef]
- Shao, H.J.; Zhang, X.P.; Wang, Z. Efficient Closed-Form Algorithms for AOA Based Self-Localization of Sensor Nodes Using Auxiliary Variables. IEEE Trans. Signal Process. 2014, 62, 2580–2594. [Google Scholar] [CrossRef]
- Doğançay, K. Passive emitter localization using weighted instrumental variables. Signal Process. 2004, 84, 487–497. [Google Scholar] [CrossRef]
- Zhou, S.; Wang, L.; Liu, R.; Chen, Y.; Peng, X.; Xie, X.; Yang, J.; Gao, S.; Shao, X. Signal Source Localization with Long-Term Observations in Distributed Angle-Only Sensors. Sensors 2022, 22, 9655. [Google Scholar] [CrossRef] [PubMed]
- Wang, L.; Zhou, S.; Chen, Y.; Xie, X. Bias compensation Kalman filter for 3D angle-only measurements target traking. In Proceedings of the International Conference on Radar Systems (RADAR 2022), Edinburgh, UK, 24–27 October 2022; Volume 2022, pp. 546–551. [Google Scholar] [CrossRef]
- Rao, S.K. Pseudo-linear estimator for bearings-only passive target tracking. IEEE Proc. Radar Sonar Navig. 2001, 148, 16–22. [Google Scholar] [CrossRef]
- He, S.; Wang, J.; Lin, D. Three-Dimensional Bias-Compensation Pseudomeasurement Kalman Filter for Bearing-Only Measurement. J. Guid. Control. Dyn. 2018, 41, 2678–2686. [Google Scholar] [CrossRef]
- Mallick, M.; Morelande, M.; Mihaylova, L.; Arulampalam, S.; Yan, Y. Angle-Only Filtering in Three Dimensions; Wiley: Hoboken, NJ, USA, 2016; pp. 3–42. [Google Scholar]
- Arasaratnam, I.; Haykin, S. Cubature Kalman Filters. IEEE Trans. Autom. Control. 2009, 54, 1254–1269. [Google Scholar] [CrossRef]
- Julier, S.; Uhlmann, J. Unscented filtering and nonlinear estimation. Proc. IEEE 2004, 92, 401–422. [Google Scholar] [CrossRef]
- Mao, W.L. GPS Interference Mitigation Using Derivative-free Kalman Filter-based RNN. Radioengineering 2016, 25, 518–526. [Google Scholar] [CrossRef]
- Yu, J.Y.; Coates, M.J.; Rabbat, M.G.; Blouin, S. A Distributed Particle Filter for Bearings-Only Tracking on Spherical Surfaces. IEEE Signal Process. Lett. 2016, 23, 326–330. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Position (m) | |
|---|---|
| Sensor #1 | |
| Sensor #2 | |
| Sensor #3 | |
| Sensor #4 | |
| Target #1 |
| Method | Intersection | LS | TLS | WLS | BCWLS |
|---|---|---|---|---|---|
| Absolute time (ms) | 312.05 | 490.21 | 675.60 | 1130.04 | 1515.82 |
| Relative time | 0.64 | 1 | 1.38 | 2.31 | 3.09 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, L.; Zhou, S.; Gong, M.; Zhao, P.; Yang, J.; Sui, X. Three-Dimensional Signal Source Localization with Angle-Only Measurements in Passive Sensor Networks. Remote Sens. 2024, 16, 1319. https://doi.org/10.3390/rs16081319
Wang L, Zhou S, Gong M, Zhao P, Yang J, Sui X. Three-Dimensional Signal Source Localization with Angle-Only Measurements in Passive Sensor Networks. Remote Sensing. 2024; 16(8):1319. https://doi.org/10.3390/rs16081319
Chicago/Turabian StyleWang, Linhai, Shenghua Zhou, Min Gong, Pengfei Zhao, Jian Yang, and Xin Sui. 2024. "Three-Dimensional Signal Source Localization with Angle-Only Measurements in Passive Sensor Networks" Remote Sensing 16, no. 8: 1319. https://doi.org/10.3390/rs16081319
APA StyleWang, L., Zhou, S., Gong, M., Zhao, P., Yang, J., & Sui, X. (2024). Three-Dimensional Signal Source Localization with Angle-Only Measurements in Passive Sensor Networks. Remote Sensing, 16(8), 1319. https://doi.org/10.3390/rs16081319