
A Sparse SAR Imaging Method for Low-Oversampled Staggered Mode via Compound Regularization

 , ,
, ,
Abstract
:1. Introduction
2. Sparse Observation Model of Staggered SAR
2.1. Observation Matrix-Based Sparse Imaging Model of Staggered SAR
2.2. Sparse Reconstruction Model of Staggered SAR
3. Sparse Reconstruction Method Based on L1/2&TV Regularization
3.1. Reconstruction Process of L1/2&TV Regularization
3.2. Imaging Operator and Echo Simulation Operator of Staggered SAR
3.3. Sparse Reconstruction Method of Staggered SAR
4. Experimental Results
4.1. Numerical Simulations
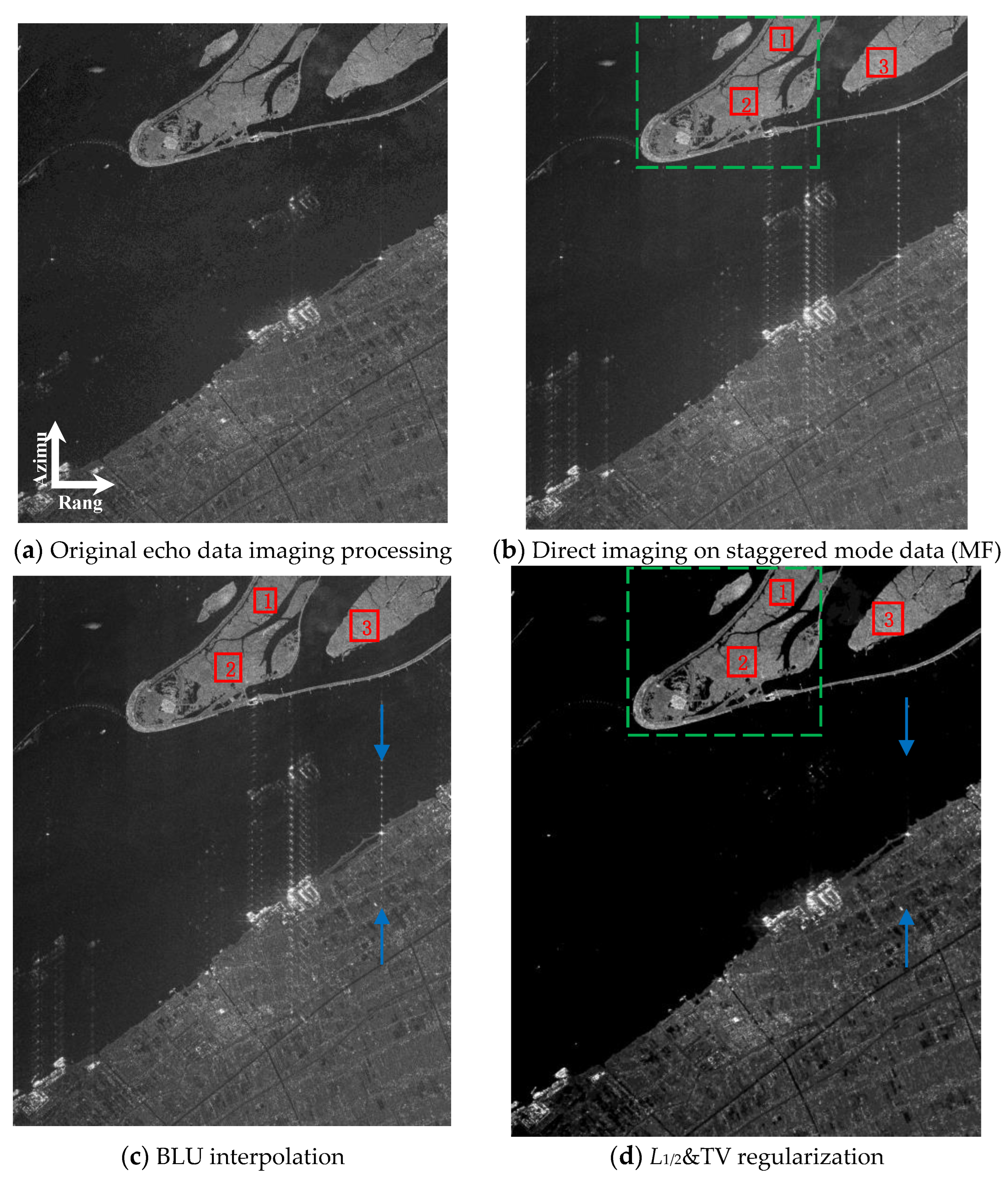
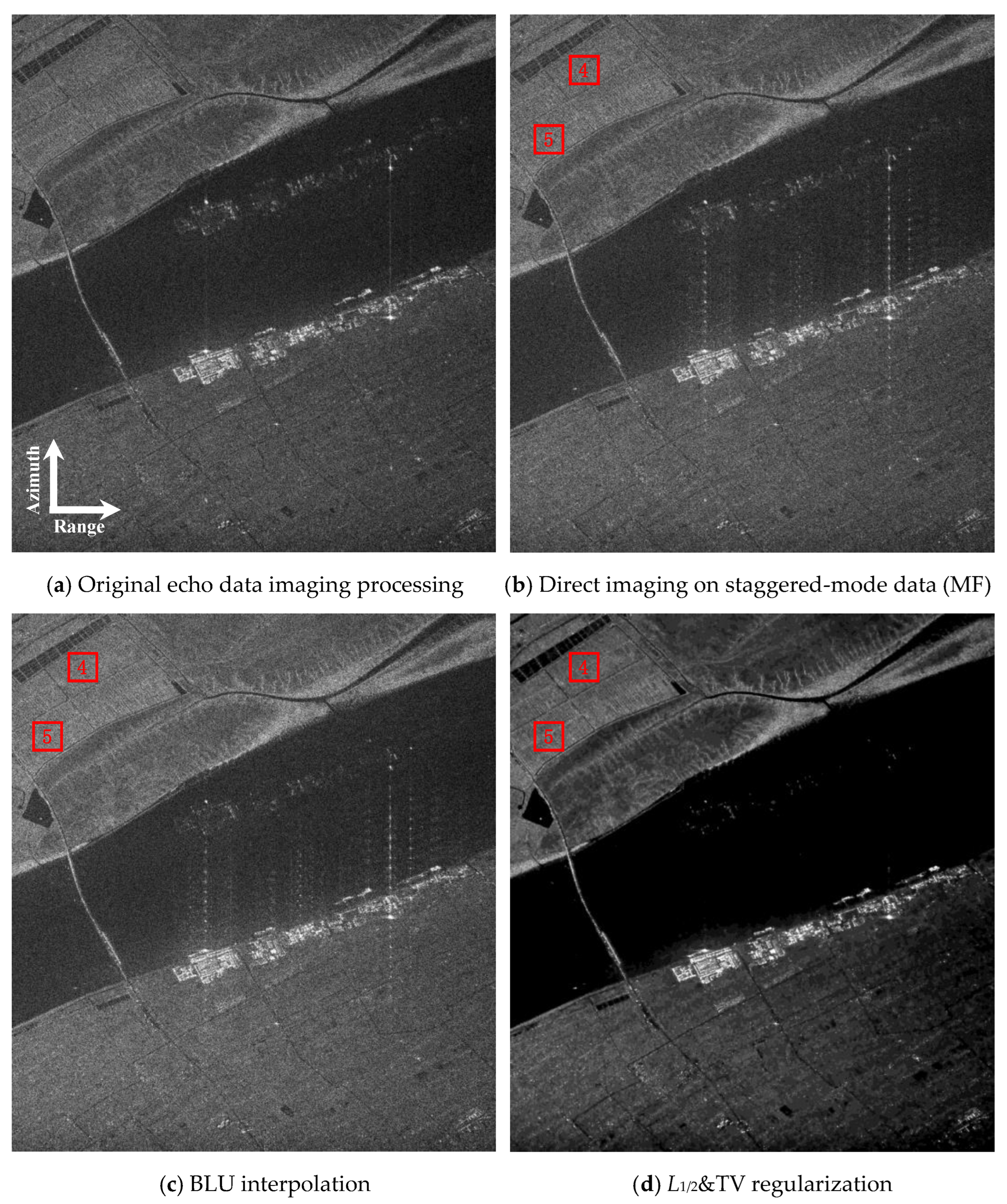
4.2. Real Data Experiments
5. Discussion
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Amitrano, D.; Di Martino, G.; Guida, R.; Iervolino, P.; Iodice, A.; Papa, M.N.; Riccio, D.; Ruello, G. Earth environmental monitoring using multi-temporal synthetic aperture radar: A critical review of selected applications. Remote Sens. 2021, 13, 604. [Google Scholar] [CrossRef]
- Alessi, M.A.; Chirico, P.G.; Sunder, S.; O’Pry, K.L. Detection and Monitoring of Small-Scale Diamond and Gold Mining Dredges Using Synthetic Aperture Radar on the Kadéï (Sangha) River, Central African Republic. Remote Sens. 2023, 15, 913. [Google Scholar] [CrossRef]
- Braun, A.; Fakhri, F.; Hochschild, V. Refugee camp monitoring and environmental change assessment of Kutupalong, Bangladesh, based on radar imagery of Sentinel-1 and ALOS-2. Remote Sens. 2019, 11, 2047. [Google Scholar] [CrossRef]
- El Hajj, M.; Baghdadi, N.; Zribi, M.; Bazzi, H. Synergic use of Sentinel-1 and Sentinel-2 images for operational soil moisture mapping at high spatial resolution over agricultural areas. Remote Sens. 2017, 9, 1292. [Google Scholar] [CrossRef]
- Mastro, P.; Masiello, G.; Serio, C.; Pepe, A. Change Detection Techniques with Synthetic Aperture Radar Images: Experiments with Random Forests and Sentinel-1 Observations. Remote Sens. 2022, 14, 3323. [Google Scholar] [CrossRef]
- Krieger, G.; Moreira, A. Spaceborne bi-and multistatic SAR: Potential and challenges. IEE Proc. Radar Sonar Navig. 2006, 153, 184–198. [Google Scholar] [CrossRef]
- Currie, A.; Brown, M.A. Wide-swath SAR. IEE Proc. F 1992, 139, 122–135. [Google Scholar] [CrossRef]
- Sikaneta, I.; Gierull, C.H.; Cerutti-Maori, D. Optimum signal processing for multichannel SAR: With application to high-resolution wide-swath imaging. IEEE Trans. Geosci. Remote Sens. 2014, 52, 6095–6109. [Google Scholar] [CrossRef]
- Krieger, G.; Gebert, N.; Moreira, A. Unambiguous SAR signal reconstruction from nonuniform displaced phase center sampling. IEEE Geosci. Remote Sens. Lett. 2004, 1, 260–264. [Google Scholar] [CrossRef]
- Zhang, S.X.; Xing, M.D.; Xia, X.G.; Zhang, L.; Guo, R.; Liao, Y.; Bao, Z. Multichannel HRWS SAR imaging based on range-variant channel calibration and multi-Doppler-direction restriction ambiguity suppression. IEEE Trans. Geosci. Remote Sens. 2014, 52, 4306–4327. [Google Scholar] [CrossRef]
- Baumgartner, S.V.; Krieger, G. Simultaneous high-resolution wide-swath SAR imaging and ground moving target indication: Processing approaches and system concepts. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2015, 8, 5015–5029. [Google Scholar] [CrossRef]
- Krieger, G. MIMO-SAR: Opportunities and pitfalls. IEEE Trans. Geosci. Remote Sens. 2014, 52, 2628–2645. [Google Scholar] [CrossRef]
- Kim, J.H.; Younis, M.; Moreira, A.; Wiesbeck, W. Spaceborne MIMO synthetic aperture radar for multimodal operation. IEEE Trans. Geosci. Remote Sens. 2015, 53, 2453–2466. [Google Scholar] [CrossRef]
- Kim, S.; Yu, J.; Jeon, S.Y.; Dewantari, A.; Ka, M.H. Signal processing for a multiple-input, multiple-output (MIMO) video synthetic aperture radar (SAR) with beat frequency division frequency-modulated continuous wave (FMCW). Remote Sens. 2017, 9, 491. [Google Scholar] [CrossRef]
- Younis, M.; Fischer, C.; Wiesbeck, W. Digital beamforming in SAR systems. IEEE Trans. Geosci. Remote Sens. 2003, 41, 1735–1739. [Google Scholar] [CrossRef]
- Reigber, A.; Schreiber, E.; Trappschuh, K.; Pasch, S.; Müller, G.; Kirchner, D.; Geßwein, D.; Schewe, S.; Nottensteiner, A.; Limbach, M.; et al. The High-Resolution Digital-Beamforming Airborne SAR System DBFSAR. Remote Sens. 2020, 12, 1710. [Google Scholar] [CrossRef]
- Gebert, N.; Krieger, G. Ultra-wide swath SAR imaging with continuous PRF variation. In Proceedings of the EUSAR 2010: 8th European Conference on Synthetic Aperture Radar, Aachen, Germany, 7–10 June 2010; pp. 1–4. [Google Scholar]
- Villano, M.; Krieger, G.; Moreira, A. Staggered-SAR for high-resolution wide-swath imaging. In Proceedings of the IET International Conference on Radar Systems, Glasgow, UK, 22–25 October 2012; pp. 1–6. [Google Scholar]
- Luo, X.L.; Wang, R.; Xu, W.; Deng, Y.K.; Guo, L. Modification of multichannel reconstruction algorithm on the SAR with linear variation of PRI. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2014, 7, 3050–3059. [Google Scholar] [CrossRef]
- Villano, M.; Krieger, G. Staggered SAR: From concept to experiments with real data. In Proceedings of the EUSAR 2014: 10th European Conference on Synthetic Aperture Radar, Berlin, Germany, 3–5 June 2014; pp. 1–4. [Google Scholar]
- Villano, M.; Krieger, G.; Moreira, A. A novel processing strategy for staggered SAR. IEEE Geosci. Remote Sens. Lett. 2014, 11, 1891–1895. [Google Scholar] [CrossRef]
- Villano, M.; Krieger, G.; Moreira, A. Staggered SAR: High-resolution wide-swath imaging by continuous PRI variation. IEEE Trans. Geosci. Remote Sens. 2014, 52, 4462–4479. [Google Scholar] [CrossRef]
- Villano, M.; Krieger, G.; Moreira, A. Onboard processing for data volume reduction in high-resolution wide-swath SAR. IEEE Geosci. Remote Sens. Lett. 2016, 13, 1173–1177. [Google Scholar] [CrossRef]
- Moreira, A.; Krieger, G.; Hajnsek, I.; Papathanassiou, K.; Younis, M.; Lopez-dekker, P.; Huber, S.; Villano, M.; Pardini, M. Tandem-L: A highly innovative bistatic SAR mission for global observation of dynamic processes on the Earth’s surface. IEEE Geosci. Remote Sens. Mag. 2015, 3, 8–23. [Google Scholar] [CrossRef]
- Huber, S.; de Almeida, F.Q.; Villano, M.; Younis, M.; Krieger, G.; Moreira, A. Tandem-L: A technical perspective on future spaceborne SAR sensors for Earth observation. IEEE Trans. Geosci. Remote Sens. 2018, 56, 4792–4807. [Google Scholar] [CrossRef]
- Liao, X.X.; Jin, C.L.; Liu, Z. Compressed Sensing Imaging for Staggered SAR with Low Oversampling Ratio. In Proceedings of the EUSAR 2021—13th European Conference on Synthetic Aperture Radar, Online, 29 March–1 April 2021; pp. 1–4. [Google Scholar]
- Pinheiro, M.; Prats-Iraola, P.; Rodriguez-Cassola, M.; Villano, M. Analysis of low-oversampled Staggered SAR data. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2020, 13, 241–255. [Google Scholar] [CrossRef]
- Zhou, Z.X.; Deng, Y.K.; Wang, W.; Jia, X.L.; Wang, R. Linear Bayesian approaches for low-oversampled stepwise staggered SAR data. IEEE Trans. Geosci. Remote Sens. 2021, 60, 1–23. [Google Scholar] [CrossRef]
- Wang, X.Y.; Wang, R.; Deng, Y.K.; Wang, W.; Li, N. SAR signal recovery and reconstruction in staggered mode with low oversampling factors. IEEE Geosci. Remote Sens. Lett. 2018, 15, 704–708. [Google Scholar] [CrossRef]
- Yardibi, T.; Li, J.; Stoica, P.; Xue, M.; Baggeroer, A.B. Source localization and sensing: A nonparametric iterative adaptive approach based on weighted least squares. IEEE Trans. Aerosp. Electron. Syst. 2010, 46, 425–443. [Google Scholar] [CrossRef]
- Pinheiro, M.; Prats-Iraola, P.; Rodriguez-Cassola, M.; Villano, M. Combining spectral estimation and BLU interpolation for the reconstruction of low-oversampled Staggered SAR data. In Proceedings of the EUSAR 2018: 12th European Conference on Synthetic Aperture Radar, Aachen, Germany, 4–7 June 2018; pp. 1–6. [Google Scholar]
- Donoho, D.L. Compressed sensing. IEEE Trans. Inf. Theory 2006, 52, 1289–1306. [Google Scholar] [CrossRef]
- Candès, E.J.; Wakin, M.B. An introduction to compressive sampling. IEEE Signal Process. Mag. 2008, 25, 21–30. [Google Scholar] [CrossRef]
- Herman, M.A.; Strohmer, T. High-resolution radar via compressed sensing. IEEE Trans. Signal Process. 2009, 57, 2275–2284. [Google Scholar] [CrossRef]
- Xu, J.; Pi, Y.; Cao, Z. Bayesian compressive sensing in synthetic aperture radar imaging. IET Radar Sonar Navig. 2012, 6, 2–8. [Google Scholar] [CrossRef]
- Candès, E.J.; Romberg, J.K.; Tao, T. Stable signal recovery from incomplete and inaccurate measurements. Commun. Pure Appl. Math. 2006, 59, 1207–1223. [Google Scholar] [CrossRef]
- Nyquist, H. Certain topics in telegraph transmission theory. Trans. Am. Inst. Electr. Eng. 1928, 47, 617–644. [Google Scholar] [CrossRef]
- Shannon, C.E. Communication in the presence of noise. Proc. Inst. Radio Eng. 1949, 37, 10–21. [Google Scholar] [CrossRef]
- Çetin, M.; Karl, W.C. Feature-enhanced synthetic aperture radar image formation based on nonquadratic regularization. IEEE Trans. Image Process. 2001, 10, 623–631. [Google Scholar] [CrossRef] [PubMed]
- Patel, V.M.; Easley, G.R.; Healy, D.M., Jr.; Chellappa, R. Compressed synthetic aperture radar. IEEE J. Sel. Topics Signal Process. 2010, 4, 244–254. [Google Scholar] [CrossRef]
- Stojanovic, I.; Çetin, M.; Karl, W.C. Compressed sensing of monostatic and multistatic SAR. IEEE Geosci. Remote Sens. Lett. 2013, 10, 1444–1448. [Google Scholar] [CrossRef]
- Zhang, B.C.; Hong, W.; Wu, Y.R. Sparse microwave imaging: Principles and applications. Sci. China Inf. Sci. 2012, 55, 1722–1754. [Google Scholar] [CrossRef]
- Çetin, M.; Stojanović, I.; Önhon, N.Ö.; Varshney, K.; Samadi, S.; Karl, W.C.; Willsky, A.S. Sparsity-driven synthetic aperture radar imaging: Reconstruction, autofocusing, moving targets, and compressed sensing. IEEE Signal Process. Mag. 2014, 31, 27–40. [Google Scholar] [CrossRef]
- Fang, J.; Xu, Z.B.; Zhang, B.C.; Hong, W.; Wu, Y.R. Fast compressed sensing SAR imaging based on approximated observation. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2013, 7, 352–363. [Google Scholar] [CrossRef]
- Zhang, B.C.; Zhang, Z.; Jiang, C.L.; Zhao, Y.; Hong, W.; Wu, Y.R. System design and first airborne experiment of sparse microwave imaging radar: Initial results. Sci. China Inf. Sci. 2015, 6, 1–10. [Google Scholar] [CrossRef]
- Xu, Z.L.; Wei, Z.H.; Wu, C.Y.; Zhang, B.C. Multichannel sliding spotlight SAR imaging based on sparse signal processing. In Proceedings of the IGARSS 2018—2018 IEEE International Geoscience and Remote Sensing Symposium, Valencia, Spain, 22–27 July 2018; pp. 3703–3706. [Google Scholar]
- Bi, H.; Zhang, B.C.; Zhu, X.X.; Jiang, C.L.; Hong, W. Extended chirp scaling-baseband azimuth scaling-based azimuth-range decouple L1 regularization for TOPS SAR imaging via CAMP. IEEE Trans. Geosci. Remote Sens. 2017, 55, 3748–3763. [Google Scholar] [CrossRef]
- Yang, X.Y.; Li, G.; Sun, J.P.; Liu, Y.; Xia, X.G. High-resolution and wide-swath SAR imaging via Poisson disk sampling and iterative shrinkage thresholding. IEEE Trans. Geosci. Remote Sens. 2019, 57, 4692–4704. [Google Scholar] [CrossRef]
- Pu, W.; Wu, J.J. OSRanP: A novel way for radar imaging utilizing joint sparsity and low-rankness. IEEE Trans. Comput. Imaging 2020, 6, 868–882. [Google Scholar] [CrossRef]
- Shen, F.F.; Zhao, G.H.; Liu, Z.C.; Shi, G.M.; Lin, J. SAR imaging with structural sparse representation. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2014, 8, 3902–3910. [Google Scholar] [CrossRef]
- Osher, S.; Ruan, F.; Xiong, J.; Yao, Y.; Yin, W. Sparse recovery via differential inclusions. Appl. Comput. Harmon. Anal. 2016, 41, 436–469. [Google Scholar] [CrossRef]
- Xu, Z.B.; Chang, X.Y.; Xu, F.M.; Zhang, H. L1/2 regularization: A thresholding representation theory and a fast solver. IEEE Trans. Neural Netw. Learn. Syst. 2012, 23, 1013–1027. [Google Scholar] [PubMed]
- Xu, Z.B.; Zhang, H.; Wang, Y.; Chang, X.Y.; Liang, Y. L1/2 regularization. Sci. China Inf. Sci. 2010, 53, 1159–1169. [Google Scholar] [CrossRef]
- Xu, Z.Q.; Liu, M.Q.; Zhou, G.R.; Wei, Z.H.; Zhang, B.C.; Wu, Y.R. An accurate sparse SAR imaging method for enhancing region-based features via nonconvex and TV regularization. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2020, 14, 350–363. [Google Scholar] [CrossRef]
- Chambolle, A. An algorithm for total variation minimization and applications. J. Math. Imaging Vis. 2004, 20, 89–97. [Google Scholar]
- Chambolle, A. Total variation minimization and a class of binary MRF models. In Proceedings of the International Workshop on Energy Minimization Methods in Computer Vision and Pattern Recognition, St. Augustine, FL, USA, 9–11 November 2015; Springer: Berlin/Heidelberg, Germany, 2005; pp. 136–152. [Google Scholar]
- Wang, S.; Xu, H.P.; Zhang, J.W. A SAR imaging method based on Lp and TV composite norm regularization. In Proceedings of the IGARSS 2020—2020 IEEE International Geoscience and Remote Sensing Symposium, Waikoloa, HI, USA, 26 September–2 October 2020; pp. 1149–1152. [Google Scholar]
- Cai, J.; Meng, Z.; Ho, C.M. Residual channel attention generative adversarial network for image super-resolution and noise reduction. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition Workshops, Seattle, WA, USA, 14–19 June 2020; pp. 454–455. [Google Scholar]
- Khan, M.; Gueaieb, W.; El Saddik, A.; Kwon, S. MSER: Multimodal speech emotion recognition using cross-attention with deep fusion. Expert Syst. Appl. 2024, 245, 122946. [Google Scholar] [CrossRef]
- Afonso, M.V.; Bioucas-Dias, J.M.; Figueiredo, M.A.T. An augmented Lagrangian approach to the constrained optimization formulation of imaging inverse problems. IEEE Trans. Image Process. 2010, 20, 681–695. [Google Scholar] [CrossRef] [PubMed]
- Jiang, C.L.; Zhang, B.C.; Fang, J.; Zhang, Z.; Hong, W.; Wu, Y.R.; Xu, Z.B. Efficient ℓq regularisation algorithm with range–azimuth decoupled for SAR imaging. Electron. Lett. 2014, 50, 204–205. [Google Scholar] [CrossRef]
- Raney, R.K.; Runge, H.; Bamler, R.; Cumming, I.G.; Wong, F.H. Precision SAR processing using chirp scaling. IEEE Trans. Geosci. Remote Sens. 1994, 32, 786–799. [Google Scholar] [CrossRef]
- Daubechies, I.; Defrise, M.; De Mol, C. An iterative thresholding algorithm for linear inverse problems with a sparsity constraint. Commun. Pure Appl. Math. J. Issued Courant Inst. Math. Sci. 2004, 57, 1413–1457. [Google Scholar] [CrossRef]
- Bioucas-Dias, J.M.; Figueiredo, M.A.T. Two-step algorithms for linear inverse problems with non-quadratic regularization. In Proceedings of the 2007 IEEE International Conference on Image Processing, Antonio, TX, USA, 16 September–19 October 2007; Volume 1, pp. I-105–I-108. [Google Scholar]
- Beck, A.; Teboulle, M. A fast iterative shrinkage-thresholding algorithm for linear inverse problems. SIAM J. Imaging Sci. 2009, 2, 183–202. [Google Scholar] [CrossRef]
- Anitori, L.; Maleki, A.; Otten, M.; Baraniuk, R.G.; Hoogeboom, P. Design and analysis of compressed sensing radar detectors. IEEE Trans. Signal Process. 2012, 61, 813–827. [Google Scholar] [CrossRef]
- Maleki, A.; Anitori, L.; Yang, Z.; Baraniuk, R.G. Asymptotic analysis of complex LASSO via complex approximate message passing (CAMP). IEEE Trans. Inf. Theory 2013, 59, 4290–4308. [Google Scholar] [CrossRef]
- Liu, M.Q.; Zhang, B.C.; Xu, Z.Q.; Zhang, Y.; Zhong, L.H.; Wu, Y.R. Ambiguities Suppression for Azimuth Multichannel SAR Based on L2, q Regularization with Application to Gaofen-3 Ultra-Fine Stripmap Mode. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2020, 14, 1532–1544. [Google Scholar] [CrossRef]
- Baron, D.; Duarte, M.F.; Wakin, M.B.; Sarvotham, S. Distributed Compressive Sensing. arXiv 2009, arXiv:0901.3403. [Google Scholar]
- Zhang, B.C.; Jiang, C.L.; Zhang, Z. Azimuth ambiguity suppression for SAR imaging based on group sparse reconstruction. In Proceedings of the 2nd International Workshop on Compressed Sensing Applied to Radar, Bonn, Germany, 17–19 September 2013; pp. 17–19. [Google Scholar]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Input: | Two-dimensional staggered-mode echo data ; sparsity of the scene ; iteration step size ; maximum iteration steps ; error parameter ; Lagrange multipliers , ; image size ; noise variance . |
| Initialization: | ; ; ; ; . |
| Iteration: | while and |
| 1. | |
| 2. | |
| 3. | |
| 4. | |
| 5. | |
| 6. | |
| 7. | |
| 8. | |
| 9. | |
| 10. | |
| 11. | |
| 12. | |
| end while | |
| Output: | The recovered image |
| Parameters | Value |
|---|---|
| Orbit height | 760 km |
| Platform velocity | 7473 m/s |
| Center frequency | 10 GHz |
| Slant range | 868–1097 km |
| Chirp bandwidth | 20 MHz |
| Processed Doppler band | 1440 Hz |
| Azimuth oversampling rate | 1.1 |
| Maximum PRI | 1/1487 s |
| Minimal PRI | 1/1714 s |
| Number of variable PRI | 21 |
| Evaluation Indicators | Imaging Methods | ||
|---|---|---|---|
| MF | BLU | L1/2&TV | |
| ISLR | −7.26 dB | −7.84 dB | −17.12 dB |
| AASR | −17.92 dB | −18.13 dB | −22.38 dB |
| Evaluation Indicator | Imaging Methods | ||
|---|---|---|---|
| MF | BLU | L1/2&TV | |
| NRMSE | 0.6862 | 0.6185 | 0.2923 |
| Parameters | Value |
|---|---|
| Platform velocity | 7538.340124 m/s |
| Wavelength | 0.055517 m |
| Sampling rate | 66.67 MHz |
| Chirp bandwidth | 60 MHz |
| Pulse duration | 45 |
| Pulse repetition frequency | 1149.45 Hz |
| Region 1 | Region 2 | Region 3 | Region 4 | Region 5 | |
| BLU | 0.9652 | 0.9677 | 0.9839 | 0.9277 | 0.9303 |
| L1/2&TV | 6.4498 | 6.4546 | 7.2608 | 6.4152 | 6.4265 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, M.; Pan, J.; Zhu, J.; Chen, Z.; Zhang, B.; Wu, Y. A Sparse SAR Imaging Method for Low-Oversampled Staggered Mode via Compound Regularization. Remote Sens. 2024, 16, 1459. https://doi.org/10.3390/rs16081459
Liu M, Pan J, Zhu J, Chen Z, Zhang B, Wu Y. A Sparse SAR Imaging Method for Low-Oversampled Staggered Mode via Compound Regularization. Remote Sensing. 2024; 16(8):1459. https://doi.org/10.3390/rs16081459
Chicago/Turabian StyleLiu, Mingqian, Jie Pan, Jinbiao Zhu, Zhengchao Chen, Bingchen Zhang, and Yirong Wu. 2024. "A Sparse SAR Imaging Method for Low-Oversampled Staggered Mode via Compound Regularization" Remote Sensing 16, no. 8: 1459. https://doi.org/10.3390/rs16081459
APA StyleLiu, M., Pan, J., Zhu, J., Chen, Z., Zhang, B., & Wu, Y. (2024). A Sparse SAR Imaging Method for Low-Oversampled Staggered Mode via Compound Regularization. Remote Sensing, 16(8), 1459. https://doi.org/10.3390/rs16081459