In this section, we analyze the influence of deterministic phase error and random phase error on the imaging performance of the distributed GEO SAR system. Experimental simulation results are then given. Typical orbital elements and system parameters for GEO SAR system are given in
Table 2 and
Table 3, respectively. According to the given parameters of GEO SAR satellite, the effective velocity is
, the squint angle is
, the equivalent synthetic aperture time of the monostatic GEO SAR system is
, the slant range is
, and the corresponding pulse delay is
. The SAR system uses oscillators with a nominal frequency of
, so the multiplication factor is
.
3.1. Deterministic Error
Using
for the center time, the instantaneous slant range
can be expressed as
is the slant range when
. GEO SAR has a long synthetic aperture time, in which case the trajectory is curved, and the slant range history needs to be modeled as a higher-order polynomial, typically a fourth-order function. However, the coefficients of the higher-order terms are too small to have an effect on the analysis of the frequency errors. So, we still use the common second-order slant range model as an approximation.
We assume that the slant ranges are approximately equal at the moments of signal transmission and reception, which ignores the position change caused by the radar’s motion during the time delay. Then, the time delay of the
-th radar can be expressed as
According to Equations (11)–(13), the deterministic error term
can be expressed as the sum of a constant term, a linear term, and a quadratic term, as follows:
To achieve good imaging, it is generally required that the phase error of adjacent pulses has to satisfy
, and the total phase error in the synthetic aperture time has to satisfy
[
36]. In a monostatic SAR system, the constant phase error will not have an impact on the imaging. Linear phase error only results in an azimuthal shift of the image, which does not affect the image quality [
37]. Quadratic and higher-order phase errors are the main cause of image defocusing [
38,
39]. It is generally required to keep the quadratic phase error within
, which will result in less than 2% main lobe broadening [
15]. So, we have
and then
with the aforementioned system parameters, the calculation yields
. According to Equation (3), the following can be obtained:
This requirement for frequency oscillator is easily met in current spaceborne SAR systems.
In the multi-monostatic GEO SAR discussed in this paper, each radar can be considered as a sub-aperture of the complete aperture. For signal processing, the echoes are spliced to obtain the complete echo signals after being received by each radar of the multi-monostatic GEO SAR. In this case, all three items of Equation (14) have an effect on image focusing. With the simulation parameters given in this paper, the linear and quadratic terms are very tiny compared to the constant term and can be neglected, so the instantaneous slant range can be replaced by the slant range at the center moment, which is
. The deterministic phase error present in the
-th echoes block at this point can be expressed as
which is determined by the deviation of the actual frequency of the frequency source from the nominal frequency.
In order to discuss the effect of segmentation constant phase errors on imaging quality, we conducted a series of simulation experiments. The simulation experiments use the same parameters listed in
Table 2 and
Table 3, with the difference that we reduced the ten platforms to two, which can be called bi-monostatic GEO SAR, to better observe the effect of the segmentation constant errors. The phase error of the first echoes block is set to 0, and the phase error of the second echoes block is Δ
f. Setting Δ
f to different values, the simulation results are shown in
Figure 3 and
Table 4.
The simulation shows that the main effect of this phase error is the rise in the sidelobes’ levels, which produces a false target, accompanied by a slight narrowing of the main lobe and a shift in azimuthal direction. When the phase error of the two echoes blocks is π, the first sidelobe is elevated to the position of the main lobe, resulting in the production of two almost identical targets with a −3 dB bandwidth spread of 13.11 m. When the phase error is less than π/2, the azimuthal resolution is unchanged with a slight narrowing of the primary flap and an elevation of the first sidelobe, but not exceeding −3 dB. However, too high a level of the sidelobe undoubtedly has a great impact on the image quality.
For this segmented constant phase error, we can take the threshold mentioned above: the phase error between neighboring echoes should be limited with π/4. Based on the above analysis, it is reasonable to use the threshold of π/4. In more precise cases, π/8 can be used as the threshold.
If the phase error is required to be limited to π/4, in the worst case, two neighboring radars have opposite frequency deviations, resulting in a phase error at the echoes block junction that is greater than π/4 even though the deterministic phase error of each radar is less than π/4. Therefore, to be on the safe side, we limit the phase error of each radar to be less than π/8, so that even if the frequency deviations of the neighboring radars are opposite, the difference in the phase error of the neighboring echoes can be controlled to be π/4 or less. So, we have [
15]
and then
The calculation yields
. Then, the frequency stability can be calculated as
This is a much higher requirement than Equation (17) and is not so easy to fulfill. The limitation derived from Equation (20) is essentially generalizable in the multi-monostatic configuration of the GEO SAR system because it is mainly determined by the slant range, which is not significantly different in the GEO SAR system. In this case, the higher the carrier frequency, the higher the requirements for frequency stability. Currently, higher frequency bands are being explored for the GEO SAR system, which makes higher demands on frequency synchronization.
To observe the influence of the deterministic phase error on SAR imaging, we conduct the multi-monostatic GEO SAR imaging simulations for a ground point target using the back-projection (BP) algorithm. The simulation parameters are listed in
Table 2 and
Table 3. The ground range resolution is 4.97 m and azimuth resolution is 4.98 m.
Figure 4 and
Figure 5 and
Table 5 show the results and performance of multi-monostatic GEO SAR with a series of frequency synchronization errors.
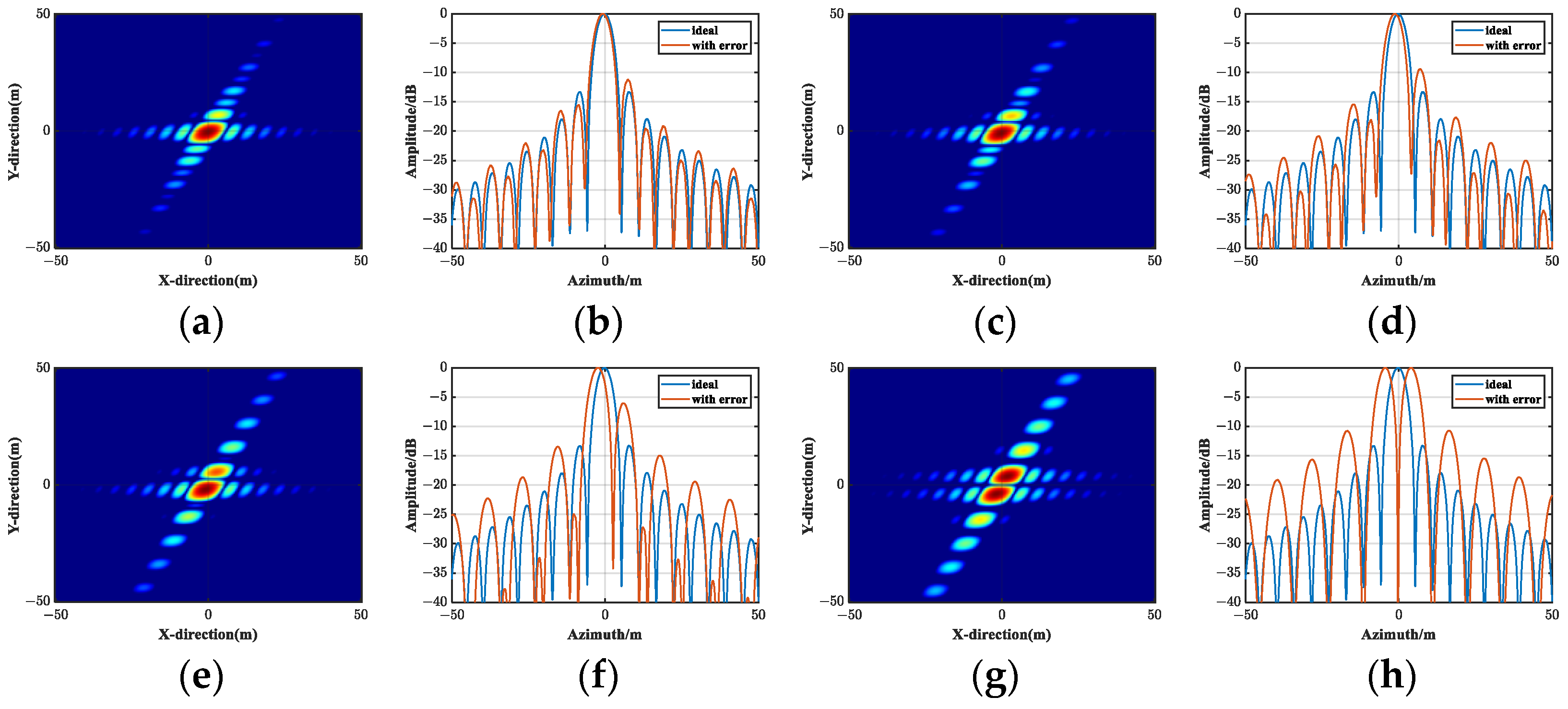
Figure 4a–c show BP images with frequency errors of
,
, and
, respectively. The errors are set according to the rule that neighboring radars have the same absolute value and opposite signs of error, such as
. This rule maximizes the phase error between neighboring radars.
Figure 4a compares their azimuth profiles with an ideal azimuth profile. We can see that as
increases, the sidelobes’ levels rise. When
, meaning that the maximum phase error between neighboring echoes is exactly
, a clear elevation of the sidelobe level can be seen, but the effect on the imaging results is small. When
, meaning that the maximum phase error between neighboring echoes is
, the sidelobes’ levels are so high that false targets begin to appear in the imaging results. When
, which means the maximum phase error is
, the target point splits into two indistinguishable points, causing enormous damage to the imaging.
Figure 4d–f show BP images with frequency errors of
,
, and
, respectively. The error for each radar in the multi-monostatic system is a random value within a range, which is a more realistic situation.
Figure 5b compares their azimuth profiles with an ideal azimuth profile. Note that the image deviation caused by the large frequency error is neglected for a better comparison of the azimuthal profiles. As the error limit increases, which means the frequency stability decreases, the sidelobe interference and the image degradation worsens. When
, multiple sidelobes’ levels are almost as high as the main lobe level that the real target cannot be distinguished.
In order to quantitatively evaluate the effect of the error, we calculated the Impulse Response Width (IRW), Peak Sidelobe Level Ratio (PSLR), and integrated sidelobe level ratio (ISLR) of the above imaging results, as shown in
Table 4. As the frequency synchronization error increases, the deterioration of the performance parameters is significant.
3.2. Random Error
According to Equation (11), random error
caused by the oscillator noise can be written as
The power spectral density function of the random error can be written as
For different SAR systems, the impact caused by phase noise mainly depends on the time delay.
Figure 6 shows the power spectrum density functions of random phase noise for GEO SAR and LEO SAR (the time delay is
). The shorter slant range of the LEO SAR system results in a smaller time delay, which in turn enables
to have a suppression effect on the low-frequency noise. As the orbital altitude increases, the time delay increases and the low-frequency suppression decreases. The expression of the spectrogram contains the cosine term, which varies periodically, and when
is sufficiently large, the spectrum will have the sidelobe.
Phase noise can be decomposed into linear phase, quadratic phase, and high-frequency phase, leading to azimuthal offset, main flap widening, and integrated sidelobe level ratio (ISLR) deterioration in the SAR image, respectively. The azimuthal offset is negligible for the system resolution. Main flap widening is quantified by analyzing the variance of the quadratic phase error (QPE) over synthetic aperture time, which can be calculated from [
15,
40]
The contribution of high-frequency phase noise to the ISLR of an SAR image can be expressed as follows:
Figure 7a,b illustrate variation curves of the standard deviation of QPE and ISLR caused by high-frequency phase noise. In our multi-monostatic configuration, synthetic aperture time is reduced to
of the monostatic system for the same resolution requirement, which leads to a significant reduction in the influence of phase noise. According to the simulation parameters in
Table 2 and
Table 3, the synthetic aperture time of the multi-monostatic system is 105 s, where the corresponding QPE is 0.04 rad and the ISLR loss is −25 dB, while the synthetic aperture time of the monostatic system corresponds a QPE of 0.11 rad and an ISLR loss of −16 dB.
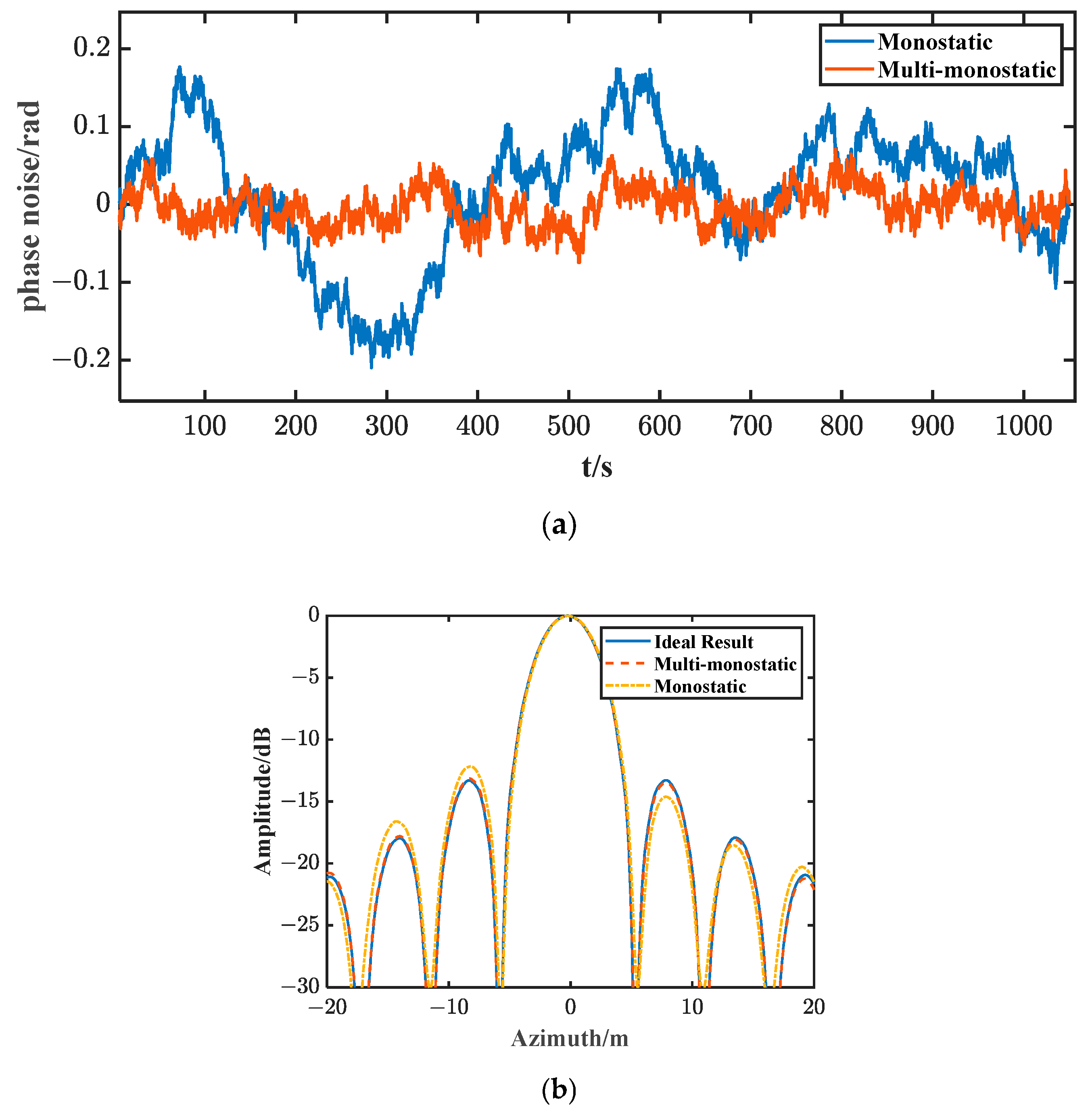
By designing filter whose frequency response agrees with the power spectrum density in Equation (23), the phase noise can be simulated in
Figure 8a, where the phase noise of the multi-monostatic system is combined with the phase noise of each platform.
Figure 8b shows the azimuth profiles with the two kinds of phase noise. As seen in
Figure 8, the distributed system effectively shortens the work time, enabling smaller phase noise and less impact on imaging.
Table 6 quantifies the performance metrics, showing it has lower PSLR and ISLR in the multi-monostatic system.



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}