Design and First Results of an UAV-Borne L-Band Radiometer for Multiple Monitoring Purposes

 , , and
, , and
Abstract
:1. Introduction
2. System Description

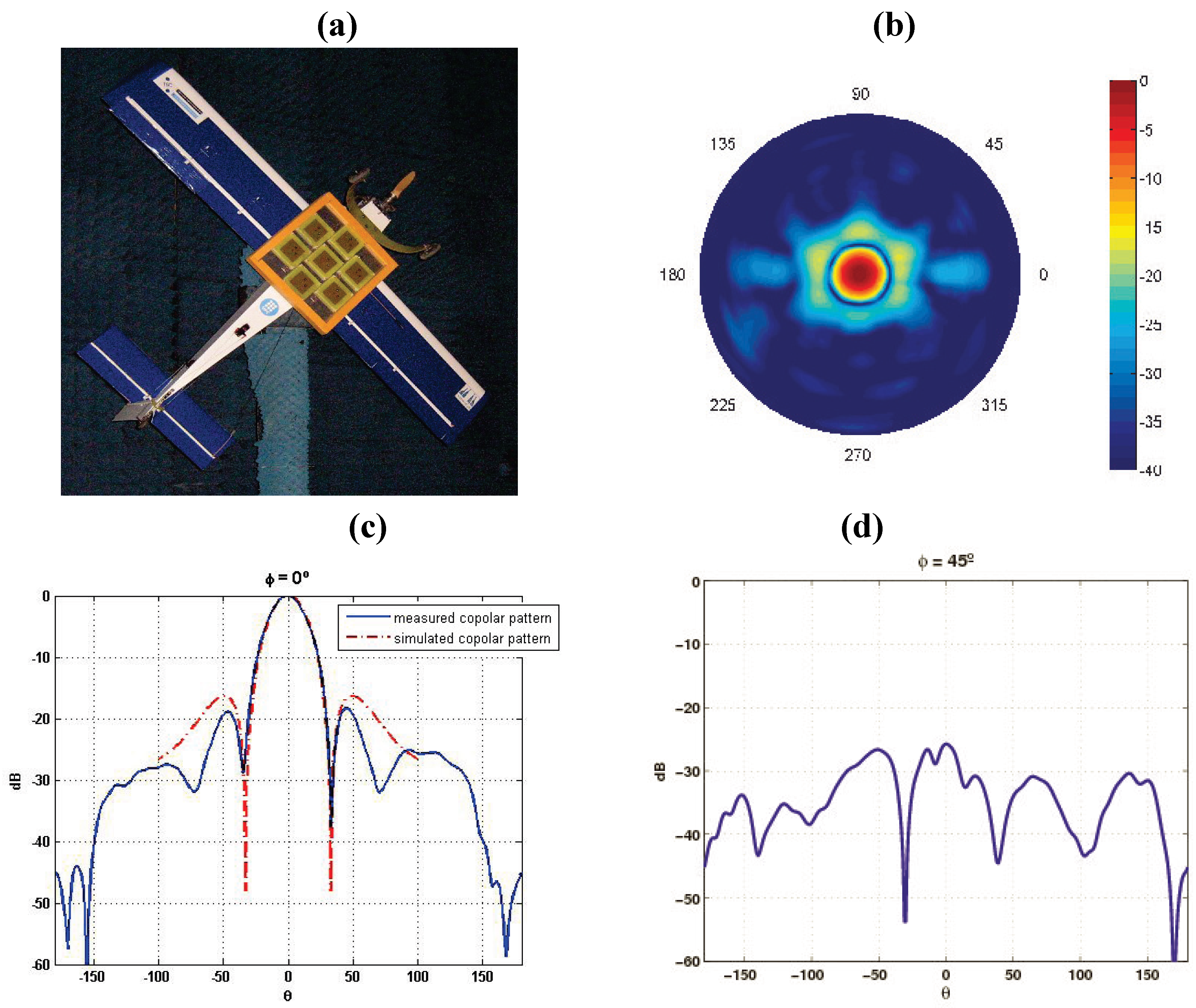
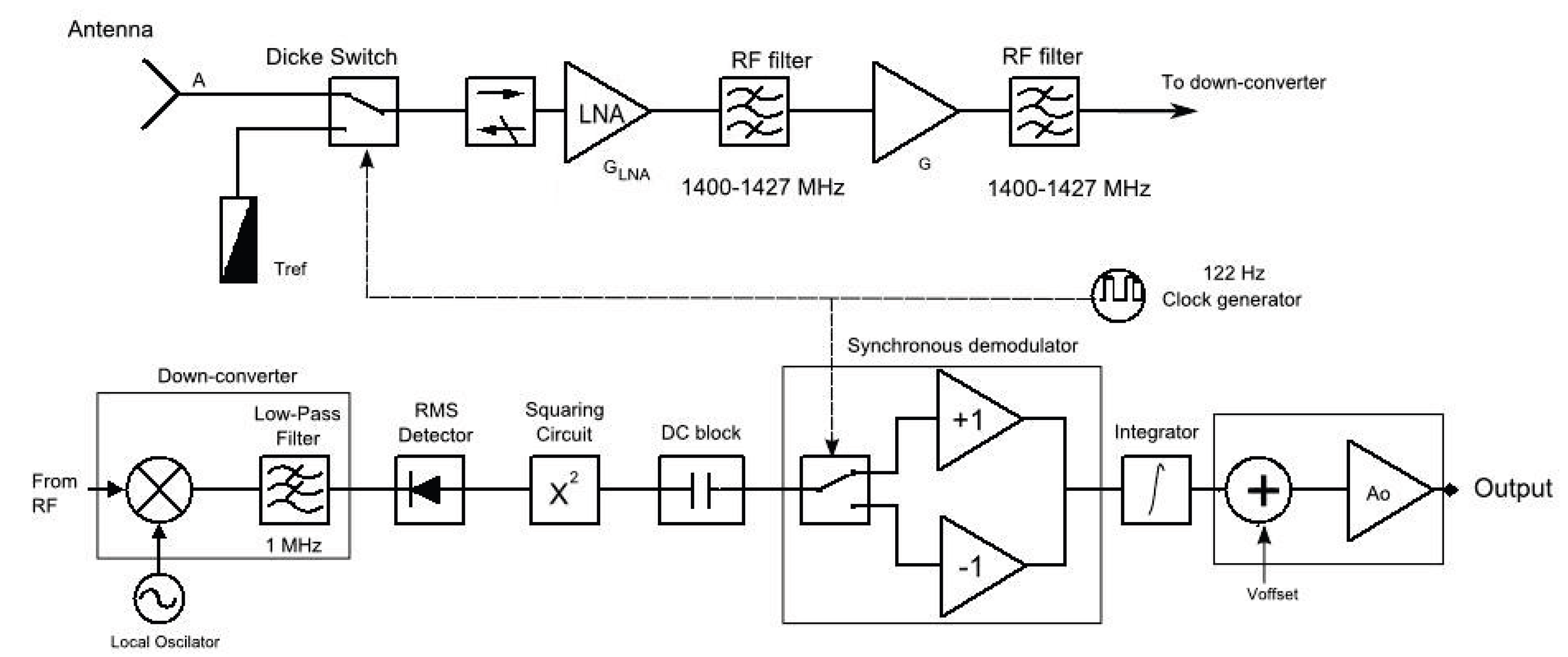
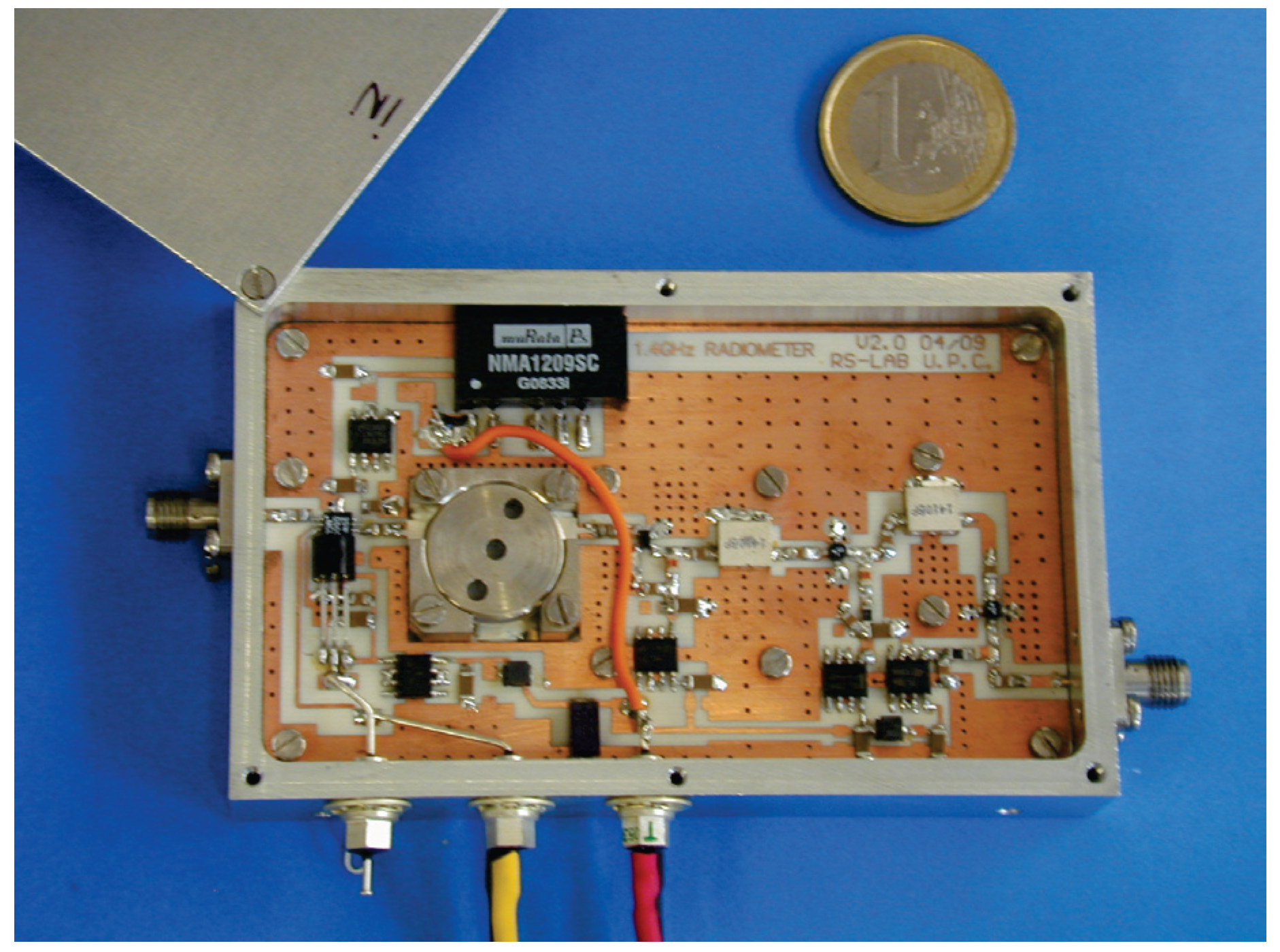
3. Airborne L-band Radiometer



4. ARIEL Soil Moisture Retrieval Processor


4.1. Algorithm Description and Procedures
- Raw data resampling.
- Radiometric calibration.
- Ground projection of the antenna footprint, taking into account the attitude and position of the platform.
- Spatial interpolation.
- Soil moisture retrieval.
4.1.1. Data Resampling
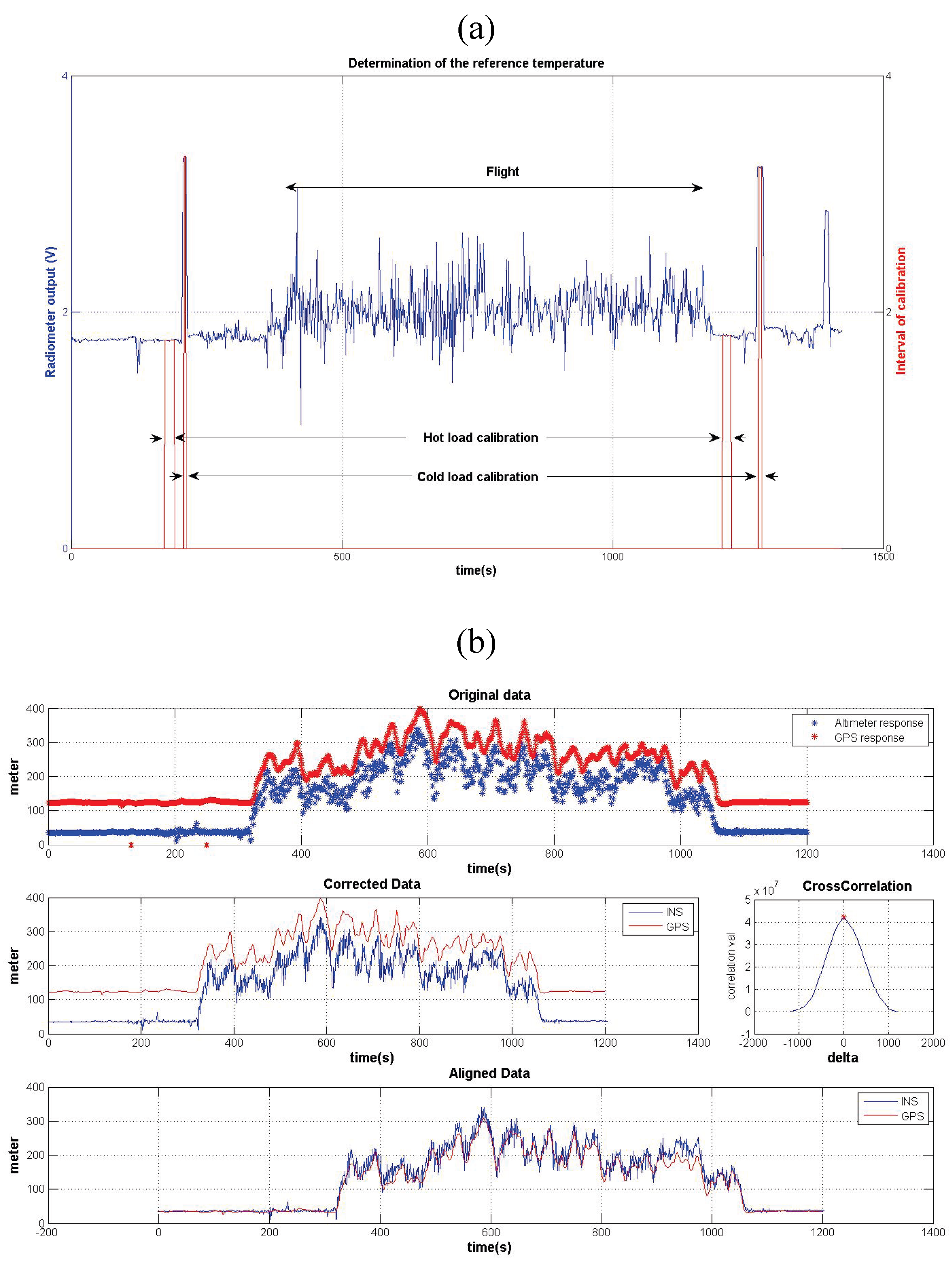
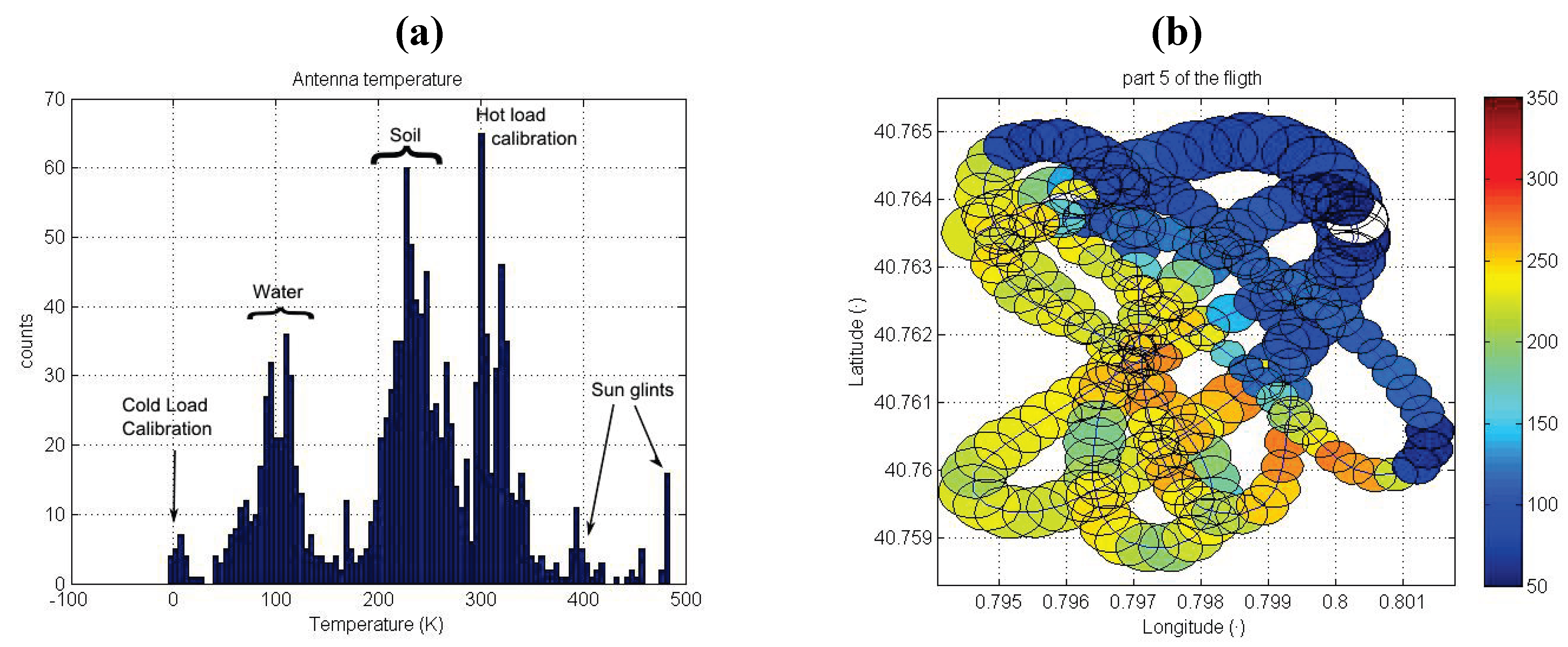
4.1.2. Radiometric Calibration
4.1.3. Data Merging and Spatial Interpolation
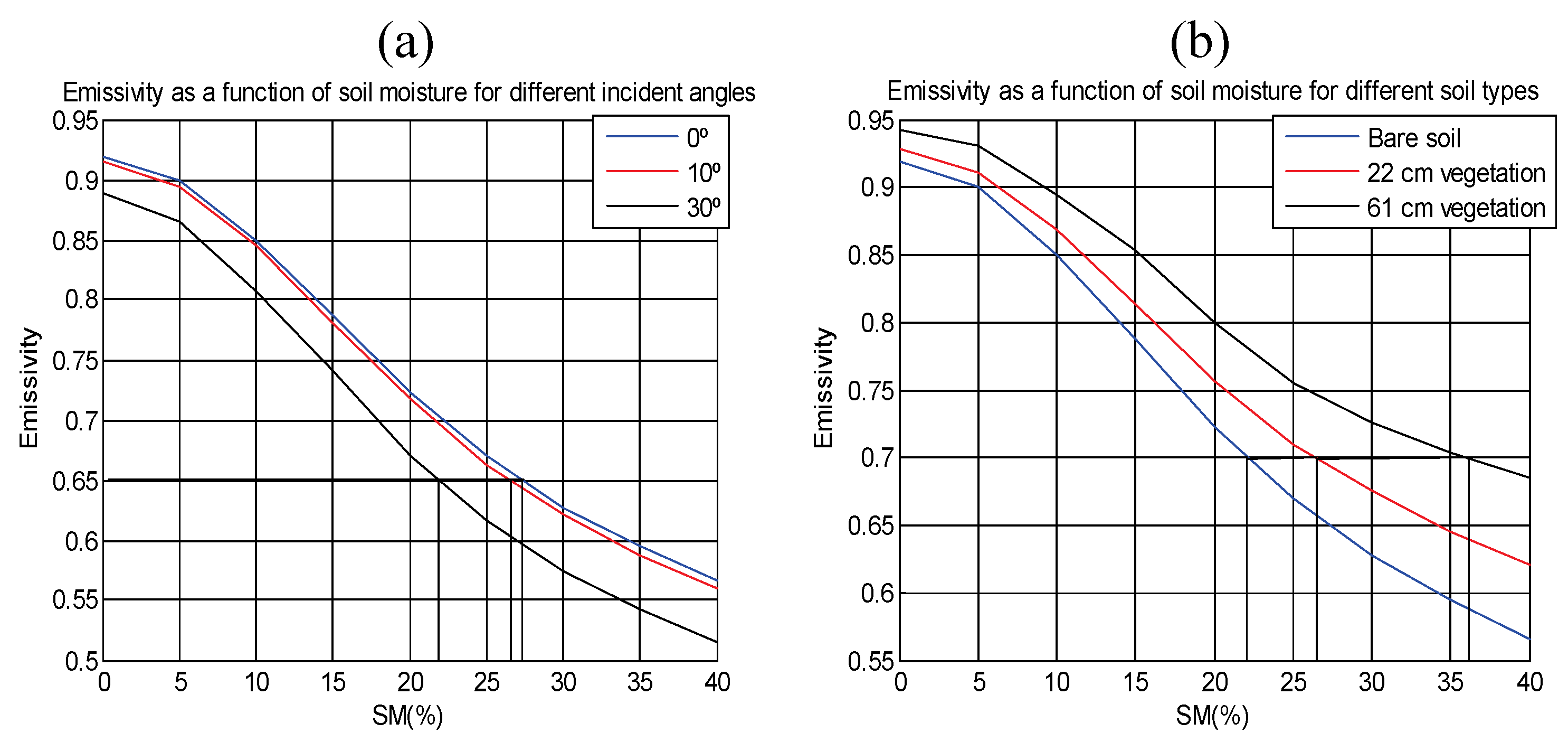
4.2. Soil Moisture Retrieval
- The soil is bare and smooth (surface roughness parameter hs = 0).
- Only incidence angles smaller than 10° have been retained, since the angular dependence of TB around 0° is weak.

5. Experimental Results
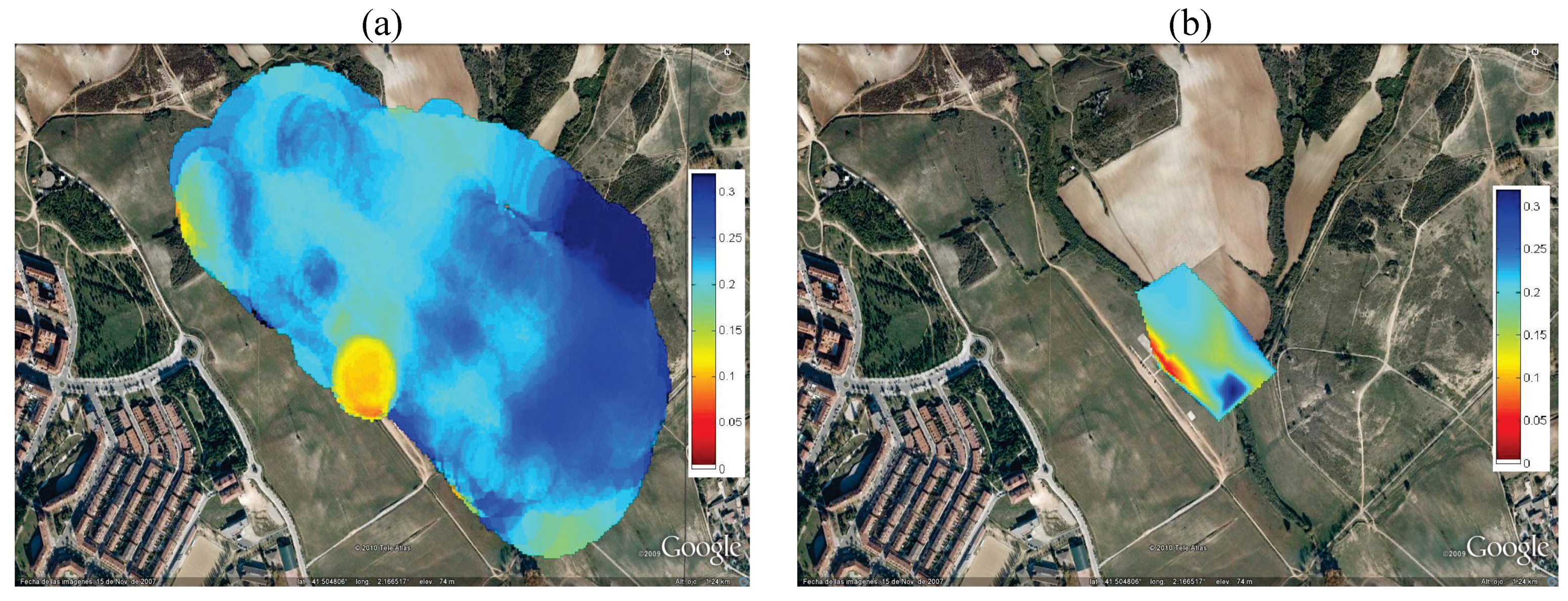
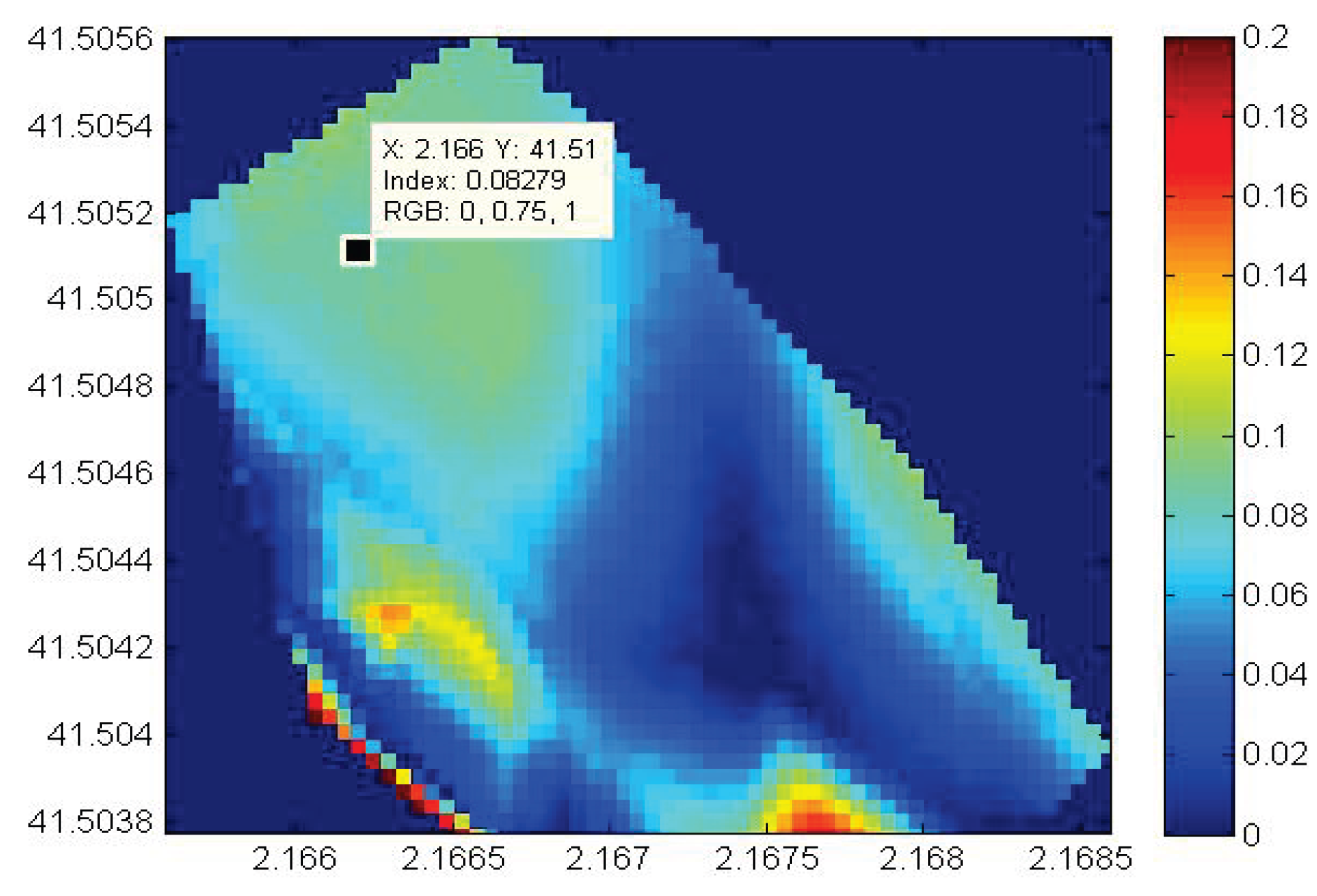
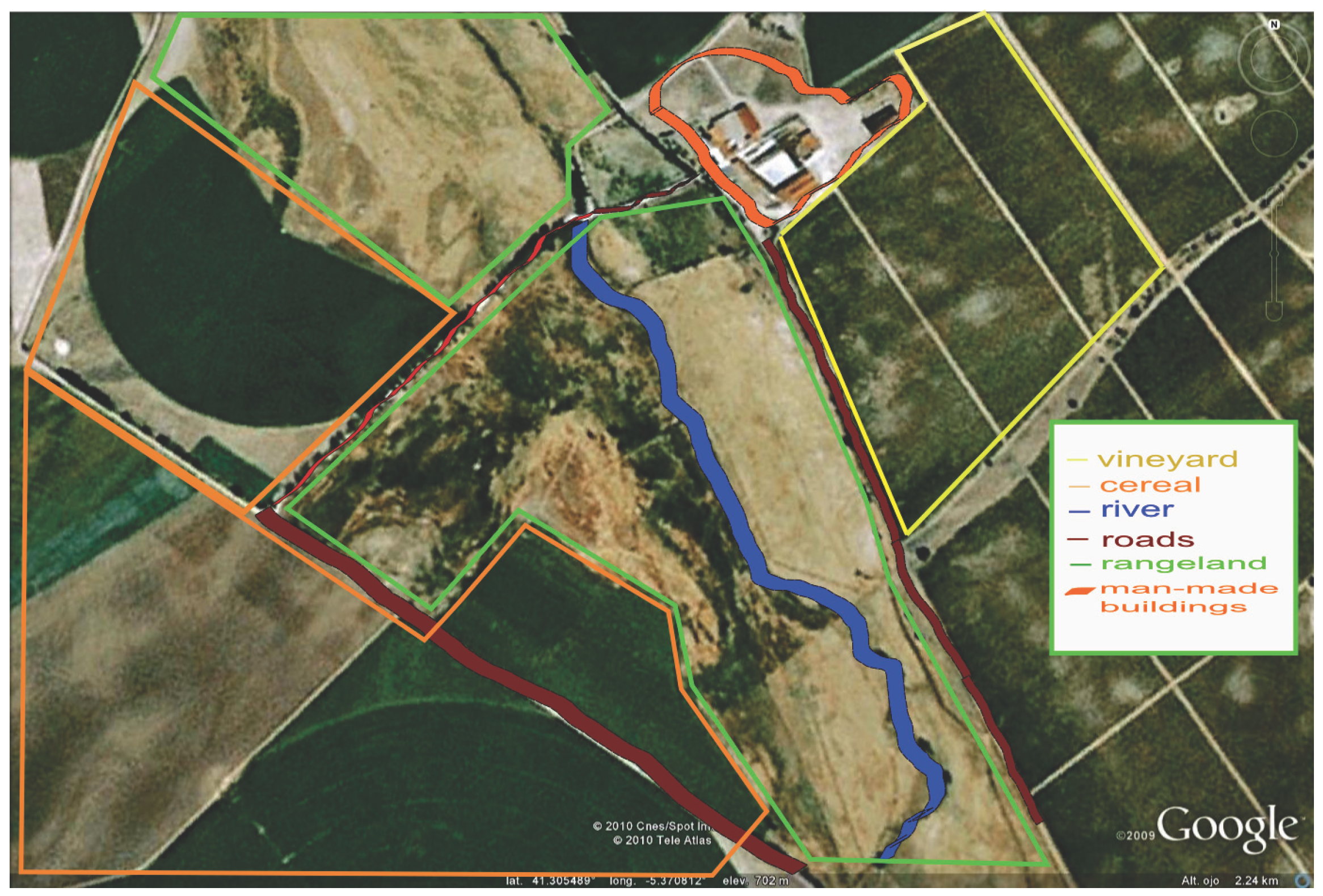
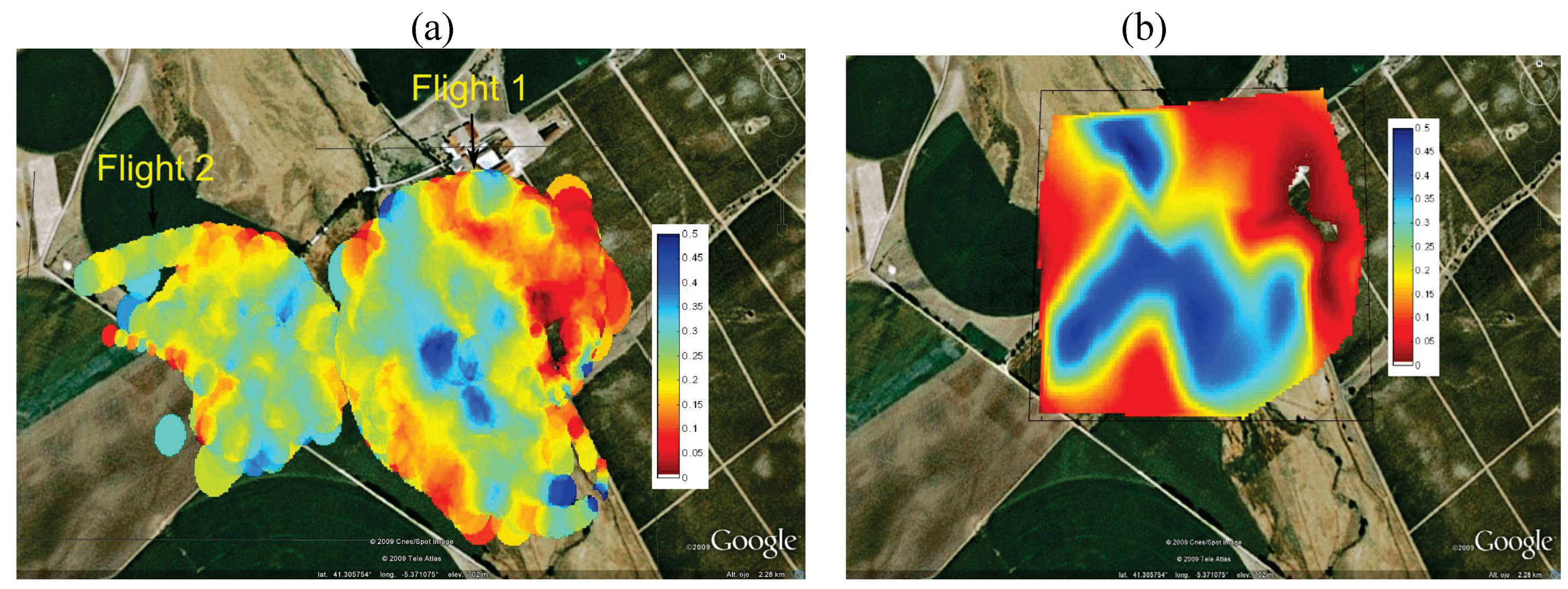
5.1. Soil Moisture Measurements at Ripollet Site Surroundings


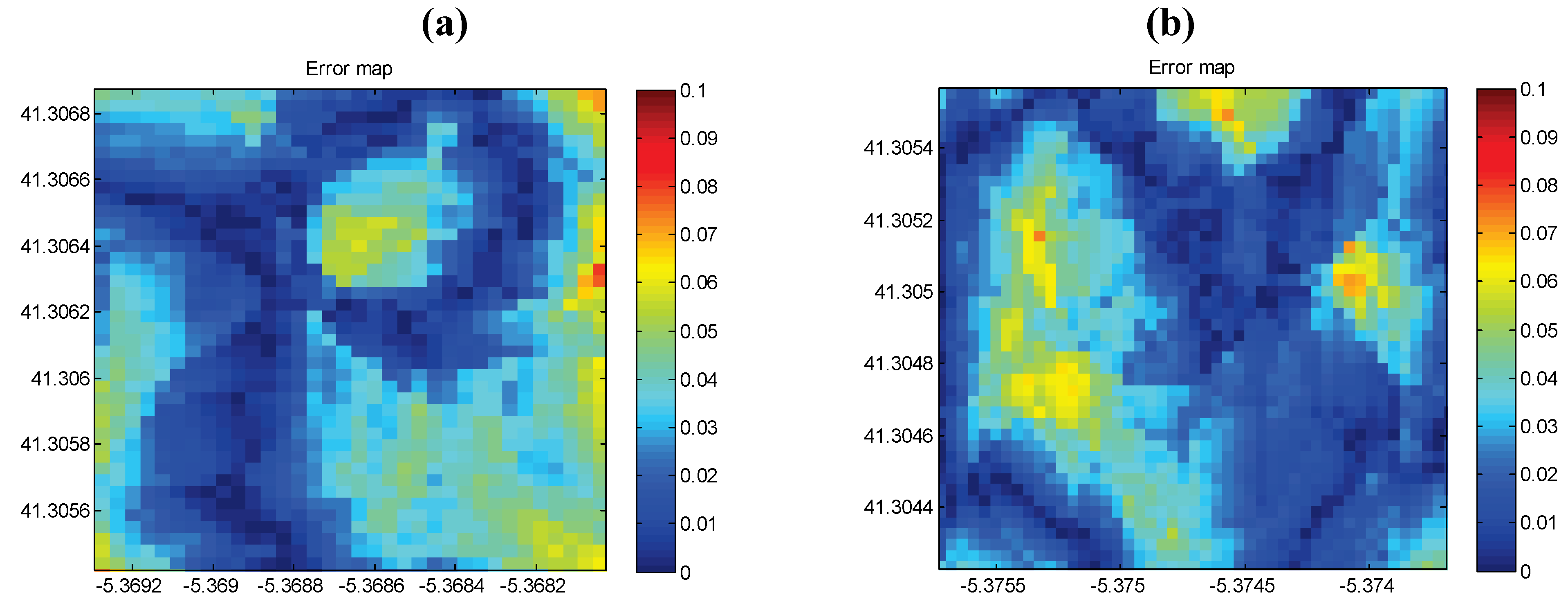
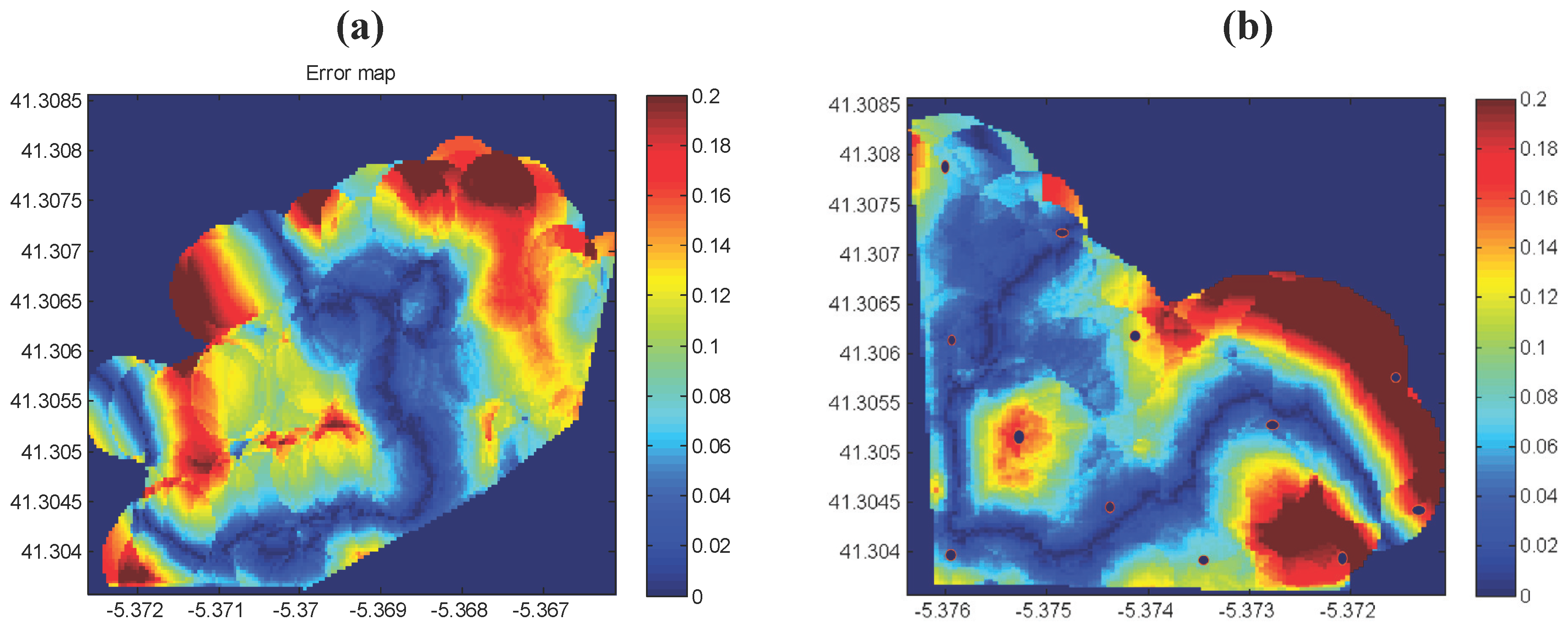
5.2. Soil Moisture Retrieval Tests at the Remedhus, SMOS Cal/Val Site Zamora, Spain
- To validate and calibrate the SMOS-derived soil moisture map, at SMOS pixel-size levels.
- To study the variability of soil moisture within the SMOS footprint.
- To test pixel disaggregation techniques development in order to improve the spatial resolution of SMOS observations. These algorithms have been tested using airborne radiometric measurements over REMEDHUS acquired with the ARIEL radiometer.





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| NDVI | Growing Cycle | VWC (%) | FVC (%) | |
|---|---|---|---|---|
| Grass/Pasture | 0.60 to 0.85 | Development | 66 to 78 | 55 to 75 |
| Barley/Cereal | 0.63 to 0.72 | Development | 70 to 75 | 49 to 61 |
| Vineyard | −0.01 to 0 | Dormancy | -- | -- |
| Unproductive | −0.05 to 0 | -- | -- | -- |
6. Conclusions
Acknowledgements
References
- Kerr, Y.H.; Waldteufel, P.; Wigneron, J.; Martinuzzi, J.; Font, J.; Berger, M. Soil moisture retrieval from space: the Soil Moisture and Ocean Salinity (SMOS) mission. IEEE Trans. Geosci. Remote Sens. 2001, 39, 1729–1735. [Google Scholar] [CrossRef]
- Lagerloef, G.; LeVine, D.; Chao, Y.; Colomb, R. Aquarius/SAC-D Mission; A key to understanding the links between salinity and climate variability. OS43C-02; AGU-ASLO Ocean Sciences, OS43C-02. February 2005. [Google Scholar]
- Le Vine, D.M.; Lagerloef, G.S.E.; Colomb, F.R.; Yueh, S.H.; Pellerano, F.A. Aquarius: An instrument to monitor sea surface salinity from space. IEEE Trans. Geosci. Remote Sens. 2007, 45, 2040–2050. [Google Scholar] [CrossRef]
- Committee on Earth Science and Applications from Space: A Community Assessment and Strategy for the Future, National Research Council. Earth Science and Applications from Space: National Imperatives for the Next Decade and Beyond. 2007. Available online: http://www.nap.edu (accessed on 12 May 2010).
- Miller, J.L.; Goodberlet, M.A.; Zaitzeff, J.B. Airborne salinity mapper makes debut in coastal zone. Trans. American Geophysical Union EOS 1998, 79, 173–177. [Google Scholar] [CrossRef]
- Haarbrink, R.; Shutko, A. New airborne sensor for soil moisture mapping. In Proceedings of the Second International Workshop on The Future of Remote Sensing, ISPRS Inter-Commission WG I/V, Autonomous Navigation, VITO/ISPRS, Antwerp, Belgium, October 2006.
- McIntyre, E.M.; Gasiewski, A.J.; Leuski, V. Development of a lobe-differencing correlation radiometer (LDCR) for airborne UAV SSS mapping. In Proceedings of the IEEE International Geoscience and Remote Sensing Symposium 2007, Barcelona, Spain, 2007; pp. 1095–1097.
- Valencia, E.; Acevo, R.; Bosch-Lluis, X.; Aguasca, A.; Rodriguez-Alvarez, N.; Ramos-Perez, I.; Marchan-Hernandez, J.F.; Glenat, M.; Bou, F.; Camps, A. initial results of an airborne light-weight l-band radiometer. In Proceedings of the IEEE International Geoscience and Remote Sensing Symposium 2008, Boston, MA, USA, 2008; pp. II-1176–II-1179.
- Remote sensing laboratory. Available online: http://www.tsc.upc.edu/rslab/index.php (accessed on 12 May 2010).
- Skou, N.; Le Vine, D. Microwave Radiometer Systems Design and Analysis, 2nd ed.; Artech House, Inc.: Norwood, MA, USA, 2006; p. 222. [Google Scholar]
- KML standard. Available online: http://www.opengeospatial.org/standards/kml/ (accessed on 12 May 2010).
- Ulaby, FT.; Moore, R.K.; Fung, A.K. Microwave Remote Sensing. Active and Passive Vol I. Fundamentals and Radiometry, 1st ed.; Artech House: Norwood, MA, USA, 1981; p. 456. [Google Scholar]
- Stein, A.; Van der Meer, F.; Gorte, B. Spatial Statistics for Remote Sensing: Remote Sensing and Digital Image Processing; Kluwer Academic Publishers: Dordrecht, The Netherlands, 1999; p. 300. [Google Scholar]
- Van de Griend, A.A.; Wigneron, J. The b-factor as a function of frequency and canopy type at h-polarization. IEEE Trans. Geosci. Remote Sens. 2004, 42, 786–794. [Google Scholar] [CrossRef]
- Kirdiashev, K.P.; Chukhlantsev, A.A.; Shutko, A.M. Microwave radiation of the earth’s surface in the presence of vegetation cover. Radio Eng. Electron. Phys. 1979, 2, 37–56. [Google Scholar]
- Wang, J.R.; Schmugge, T.J. An empirical model for the complex dielectric permittivity of soils as a function of water content. IEEE Trans. Geosci. Remote Sens. 1980, 18, 288–296. [Google Scholar] [CrossRef]
- Escorihuela, M.J.; Kerr, Y.H.; de Rosnay, P.; Wigneron, J.; Calvet, J.; Lemaitre, F. A simple model of the bare soil microwave emission at l-band. IEEE Trans. Geosci. Remote Sens. 2007, 45, 1978–1987. [Google Scholar] [CrossRef]
- Acevo-Herrera, R.; Aguasca, A.; Bosch-Lluis, X.; Camps, A. On the Use of Compact L-band Dicke Radiometer (ARIEL) and UAV for Soil Moisture and Salinity Map Retrieval: 2008/2009 Field Experiments. In Proceedings of the IEEE International Geoscience and Remote Sensing Symposium 2009, Cape Town, South Africa, 2009; pp. IV729–IV732.
- Monerris, A.; Rodriguez-Alvarez, N.; Vall-llossera, M.; Camps, A.; Piles, M.; Martinez-Fernandez, J.; Sanchez-Martin, N.; Perez-Gutierrez, C.; Baroncini-Turricchia, G.; Acevo, R.; Aguasca, A. The GPS and RAdiometric Joint Observations Experiment at the REMEDHUS Site (Zamora-Salamanca Region, Spain). In Proceedings of the IEEE International Geoscience and Remote Sensing Symposium 2009, Cape Town, South Africa, 2009; pp. III286–III289.
- ECH2O Soil Moisture Sensor. Available online: http://www.decagon.com/ag_research/soil/ec5.php (accessed on 12 May 2010).
- Stevens’ Hydra Probe II Soil Moisture Sensor (SDI-12 / RS485). Available online: http://www.stevenswater.com/catalog/products/soil_sensors/datasheet/hydraprobeiidatasheetnewweb.pdf (accessed on 12 May 2010).
© 2010 by the authors; licensee MDPI, Basel, Switzerland. This article is an Open Access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/3.0/).
Share and Cite
Acevo-Herrera, R.; Aguasca, A.; Bosch-Lluis, X.; Camps, A.; Martínez-Fernández, J.; Sánchez-Martín, N.; Pérez-Gutiérrez, C. Design and First Results of an UAV-Borne L-Band Radiometer for Multiple Monitoring Purposes. Remote Sens. 2010, 2, 1662-1679. https://doi.org/10.3390/rs2071662
Acevo-Herrera R, Aguasca A, Bosch-Lluis X, Camps A, Martínez-Fernández J, Sánchez-Martín N, Pérez-Gutiérrez C. Design and First Results of an UAV-Borne L-Band Radiometer for Multiple Monitoring Purposes. Remote Sensing. 2010; 2(7):1662-1679. https://doi.org/10.3390/rs2071662
Chicago/Turabian StyleAcevo-Herrera, Rene, Albert Aguasca, Xavier Bosch-Lluis, Adriano Camps, José Martínez-Fernández, Nilda Sánchez-Martín, and Carlos Pérez-Gutiérrez. 2010. "Design and First Results of an UAV-Borne L-Band Radiometer for Multiple Monitoring Purposes" Remote Sensing 2, no. 7: 1662-1679. https://doi.org/10.3390/rs2071662
APA StyleAcevo-Herrera, R., Aguasca, A., Bosch-Lluis, X., Camps, A., Martínez-Fernández, J., Sánchez-Martín, N., & Pérez-Gutiérrez, C. (2010). Design and First Results of an UAV-Borne L-Band Radiometer for Multiple Monitoring Purposes. Remote Sensing, 2(7), 1662-1679. https://doi.org/10.3390/rs2071662